l.vandenberghe ece236c(spring2019) 4.proximalgradientmethodvandenbe/236c/lectures/proxgrad.pdf ·...
TRANSCRIPT

L. Vandenberghe ECE236C (Spring 2019)
4. Proximal gradient method
• motivation
• proximal mapping
• proximal gradient method with fixed step size
• proximal gradient method with line search
4.1

Proximal mapping
the proximal mapping (or prox-operator) of a convex function h is defined as
proxh(x) = argminu
(h(u) + 1
2‖u − x‖22
)Examples
• h(x) = 0: proxh(x) = x
• h(x) is indicator function of closed convex set C: proxh is projection on C
proxh(x) = argminu∈C
‖u − x‖22 = PC(x)
• h(x) = ‖x‖1: proxh is the “soft-threshold” (shrinkage) operation
proxh(x)i =
xi − 1 xi ≥ 10 |xi | ≤ 1xi + 1 xi ≤ −1
Proximal gradient method 4.2

Proximal gradient method
unconstrained optimization with objective split in two components
minimize f (x) = g(x) + h(x)
• g convex, differentiable, dom g = Rn
• h convex with inexpensive prox-operator
Proximal gradient algorithm
xk+1 = proxtk h (xk − tk∇g(xk))
• tk > 0 is step size, constant or determined by line search
• can start at infeasible x0 (however xk ∈ dom f = dom h for k ≥ 1)
Proximal gradient method 4.3

Interpretation
x+ = proxth (x − t∇g(x))
from definition of proximal mapping:
x+ = argminu
(h(u) + 1
2t‖u − x + t∇g(x)‖22
)= argmin
u
(h(u) + g(x) + ∇g(x)T(u − x) + 1
2t‖u − x‖22
)
x+ minimizes h(u) plus a simple quadratic local model of g(u) around x
Proximal gradient method 4.4

Examples
minimize g(x) + h(x)
Gradient method: special case with h(x) = 0
x+ = x − t∇g(x)
Gradient projection method: special case with h(x) = δC(x) (indicator of C)
x+ = PC (x − t∇g(x)) C
x
x − t∇g(x)x+
Proximal gradient method 4.5
Examples
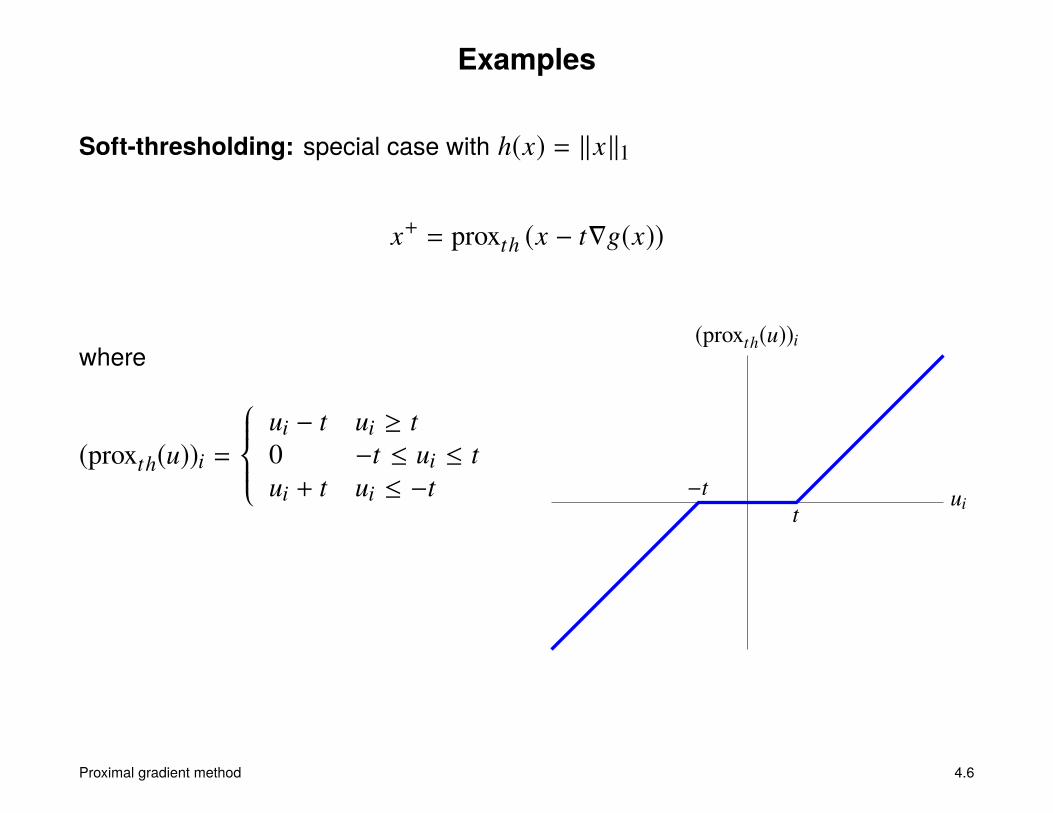
Soft-thresholding: special case with h(x) = ‖x‖1
x+ = proxth (x − t∇g(x))
where
(proxth(u))i =
ui − t ui ≥ t0 −t ≤ ui ≤ tui + t ui ≤ −t ui
(proxth(u))i
t−t
Proximal gradient method 4.6

Outline
• motivation
• proximal mapping
• proximal gradient method with fixed step size
• proximal gradient method with line search

Proximal mapping
if h is convex and closed (has a closed epigraph), then
proxh(x) = argminu
(h(u) + 1
2‖u − x‖22
)exists and is unique for all x
• will be studied in more detail in one of the next lectures
• from optimality conditions of minimization in the definition:
u = proxh(x) ⇐⇒ x − u ∈ ∂h(u)⇐⇒ h(z) ≥ h(u) + (x − u)T(z − u) for all z
Proximal gradient method 4.7

Projection on closed convex set
proximal mapping of indicator function δC is Euclidean projection on C
proxδC(x) = argmin
u∈C‖u − x‖22 = PC(x)
u = PC(x)m
(x − u)T(z − u) ≤ 0 ∀z ∈ C
C
x
u
we will see that proximal mappings have many properties of projections
Proximal gradient method 4.8

Firm nonexpansiveness
proximal mappings are firmly nonexpansive (co-coercive with constant 1):
(proxh(x) − proxh(y))T(x − y) ≥ ‖proxh(x) − proxh(y)‖22
• follows from page 4.7: if u = proxh(x), v = proxh(y), then
x − u ∈ ∂h(u), y − v ∈ ∂h(v)
combining this with monotonicity of subdifferential (page 2.9) gives
(x − u − y + v)T(u − v) ≥ 0
• a weaker property is nonexpansiveness (Lipschitz continuity with constant 1): proxh(x) − proxh(y)
2 ≤ ‖x − y‖2
follows from firm nonexpansiveness and Cauchy–Schwarz inequality
Proximal gradient method 4.9

Outline
• motivation
• proximal mapping
• proximal gradient method with fixed step size
• proximal gradient method with line search

Assumptions
minimize f (x) = g(x) + h(x)
• h is closed and convex (so that proxth is well defined)
• g is differentiable with dom g = Rn, and L-smooth for the Euclidean norm, i.e.,
L2
xT x − g(x) is convex
• there exists a constant m ≥ 0 such that
g(x) − m2
xT x is convex
when m > 0 this is m-strong convexity for the Euclidean norm
• the optimal value f? is finite and attained at x? (not necessarily unique)
Proximal gradient method 4.10

Implications of assumptions on g
Lower bound
• convexity of the the function g(x) − (m/2)xT x implies (page 1.19):
g(y) ≥ g(x) + ∇g(x)T(y − x) + m2‖y − x‖22 for all x, y (1)
• if m = 0, this means g is convex; if m > 0, strongly convex (lecture 1)
Upper bound
• convexity of the function (L/2)xT x − g(x) implies (page 1.12):
g(y) ≤ g(x) + ∇g(x)T(y − x) + L2‖y − x‖22 for all x, y (2)
• this is equivalent to Lipschitz continuity and co-coercivity of gradient (lecture 1)
Proximal gradient method 4.11

Gradient map
Gt(x) = 1t(x − proxth(x − t∇g(x)))
Gt(x) is the negative “step” in the proximal gradient update
x+ = proxth (x − t∇g(x))= x − tGt(x)
• Gt(x) is not a gradient or subgradient of f = g + h
• from subgradient definition of prox-operator (page 4.7),
Gt(x) ∈ ∇g(x) + ∂h (x − tGt(x))
• Gt(x) = 0 if and only if x minimizes f (x) = g(x) + h(x)
Proximal gradient method 4.12

Consequences of quadratic bounds on g
substitute y = x − tGt(x) in the bounds (1) and (2): for all t,
mt2
2‖Gt(x)‖22 ≤ g (x − tGt(x)) − g(x) + t∇g(x)TGt(x) ≤ Lt2
2‖Gt(x)‖22
• if 0 < t ≤ 1/L, then the upper bound implies
g(x − tGt(x)) ≤ g(x) − t∇g(x)TGt(x) + t2‖Gt(x)‖22 (3)
• if the inequality (3) is satisfied and tGt(x) , 0, then mt ≤ 1
• if the inequality (3) is satisfied, then for all z,
f (x − tGt(x)) ≤ f (z) + Gt(x)T(x − z) − t2‖Gt(x)‖22 −
m2‖x − z‖22 (4)
(proof on next page)
Proximal gradient method 4.13

Proof of (4):
f (x − tGt(x))≤ g(x) − t∇g(x)TGt(x) + t
2‖Gt(x)‖22 + h(x − tGt(x))
≤ g(z) − ∇g(x)T(z − x) − m2‖z − x‖22 − t∇g(x)TGt(x) + t
2‖Gt(x)‖22
+ h(x − tGt(x))≤ g(z) − ∇g(x)T(z − x) − m
2‖z − x‖22 − t∇g(x)TGt(x) + t
2‖Gt(x)‖22
+ h(z) − (Gt(x) − ∇g(x))T(z − x + tGt(x))= g(z) + h(z) + Gt(x)T(x − z) − t
2‖Gt(x)‖22 −
m2‖x − z‖22
• in the first step we add h(x − tGt(x)) to both sides of the inequality (3)
• in the next step we use the lower bound on g(z) from (1)
• in step 3, we use Gt(x) − ∇g(x) ∈ ∂h(x − tGt(x)) (see page 4.12)
Proximal gradient method 4.14

Progress in one iteration
for a step size t that satisfies the inequality (3), define
x+ = x − tGt(x)
• inequality (4) with z = x shows that the algorithm is a descent method:
f (x+) ≤ f (x) − t2‖Gt(x)‖22
• inequality (4) with z = x? shows that
f (x+) − f? ≤ Gt(x)T(x − x?) − t2‖Gt(x)‖22 −
m2‖x − x?‖22
=12t
( x − x? 2
2 − x − x? − tGt(x)
22
)− m
2‖x − x?‖22
=12t
((1 − mt)‖x − x?‖22 − ‖x+ − x?‖22
)(5)
≤ 12t
(‖x − x?‖22 − ‖x+ − x?‖22
)(6)
Proximal gradient method 4.15

Analysis for fixed step size
add inequalities (6) with x = xi, x+ = xi+1, t = ti = 1/L from i = 0 to i = k − 1
k∑i=1( f (xi) − f?) ≤ 1
2t
k−1∑i=0
(‖xi − x?‖22 − ‖xi+1 − x?‖22
)=
12t
(‖x0 − x?‖22 − ‖xk − x?‖22
)≤ 1
2t‖x0 − x?‖22
since f (xi) is nonincreasing,
f (xk) − f? ≤ 1k
k∑i=1( f (xi) − f?) ≤ 1
2kt‖x0 − x?‖22
Proximal gradient method 4.16

Distance to optimal set
• from (5) and f (x+) ≥ f?, the distance to the optimal set does not increase:
‖x+ − x?‖22 ≤ (1 − mt)‖x − x?‖22≤ ‖x − x?‖22
• for fixed step size tk = 1/L
‖xk − x?‖22 ≤ ck ‖x0 − x?‖22, c = 1 − mL
i.e., linear convergence if g is strongly convex (m > 0)
Proximal gradient method 4.17

Example: quadratic program with box constraints
minimize (1/2)xT Ax + bT xsubject to 0 � x � 1
0 5 10 15 20 25 30 35 40 45 50
10−6
10−5
10−4
10−3
10−2
10−1
100
k
(f(x
k)−
f?)/
f?
n = 3000; fixed step size t = 1/λmax(A)Proximal gradient method 4.18

Example: 1-norm regularized least-squares
minimize12‖Ax − b‖22 + ‖x‖1
0 10 20 30 40 50 60 70 80 90 100
10−5
10−4
10−3
10−2
10−1
100
k
(f(x
k)−
f?)/
f?
randomly generated A ∈ R2000×1000; step tk = 1/L with L = λmax(AT A)Proximal gradient method 4.19

Outline
• introduction
• proximal mapping
• proximal gradient method with fixed step size
• proximal gradient method with line search

Line search
• the analysis for fixed step size (page 4.13) starts with the inequality
g(x − tGt(x)) ≤ g(x) − t∇g(x)TGt(x) + t2‖Gt(x)‖22 (3)
this inequality is known to hold for 0 < t ≤ 1/L
• if L is not known, we can satisfy (3) by a backtracking line search:
start at some t := t̂ > 0 and backtrack (t := βt) until (3) holds
• step size t selected by the line search satisfies t ≥ tmin = min{t̂, β/L}
• requires one evaluation of g and proxth per line search iteration
several other types of line search work
Proximal gradient method 4.20

Example
line search for gradient projection method
x+ = PC (x − t∇g(x)) = x − tGt(x)
C
x − t̂∇g(x) PC(x − t̂∇g(x))
x − βt̂∇g(x) PC(x − βt̂∇g(x))
x
backtrack until PC(x − t∇g(x)) satisfies the “sufficient decrease” inequality (3)
Proximal gradient method 4.21

Analysis with line search
from page 4.15, if (3) holds in iteration i, then f (xi+1) < f (xi) and
ti( f (xi+1) − f?) ≤ 12
(‖xi − x?‖22 − ‖xi+1 − x?‖22
)• adding inequalities for i = 0 to i = k − 1 gives
(k−1∑i=0
ti) ( f (xk) − f?) ≤k−1∑i=0
ti( f (xi+1) − f?) ≤ 12‖x0 − x?‖22
first inequality holds because f (xi) is nonincreasing
• since ti ≥ tmin, we obtain a similar 1/k bound as for fixed step size
f (xk) − f? ≤ 12 ∑k−1
i=0 ti‖x0 − x?‖22 ≤
12ktmin
‖x0 − x?‖22
Proximal gradient method 4.22

Distance to optimal set
from page 4.15, if (3) holds in iteration i, then
‖xi+1 − x?‖22 ≤ (1 − mti)‖xi − x?‖22≤ (1 − mtmin) ‖xi − x?‖22= c ‖xi − x?‖22
‖xk − x?‖22 ≤ ck ‖x0 − x?‖22
withc = 1 − mtmin = max{1 − βm
L, 1 − mt̂}
hence linear convergence if m > 0
Proximal gradient method 4.23

Summary: proximal gradient method
• minimizes sums of differentiable and non-differentiable convex functions
f (x) = g(x) + h(x)
• useful when nondifferentiable term h is simple (has inexpensive prox-operator)
• convergence properties are similar to standard gradient method (h(x) = 0)
• less general but faster than subgradient method
Proximal gradient method 4.24
References
• A. Beck, First-Order Methods in Optimization (2017), §10.4 and §10.6.
• A. Beck and M. Teboulle, A fast iterative shrinkage-thresholding algorithm forlinear inverse problems, SIAM Journal on Imaging Sciences (2009).
• A. Beck and M. Teboulle, Gradient-based algorithms with applications to signalrecovery, in: Y. Eldar and D. Palomar (Eds.), Convex Optimization in SignalProcessing and Communications (2009).
• Yu. Nesterov, Lectures on Convex Optimization (2018), §2.2.3–2.2.4.
• B. T. Polyak, Introduction to Optimization (1987), §7.2.1.
Proximal gradient method 4.25