luis alvaro salazar salazar - universidad nacional de ... · presentacion es satisfactorio ......
TRANSCRIPT


UNIVERSIDAD NACIONAL DE COLOMBIA SECCIONAL MANIZALES
FACULTAD DE CIENCIAS Y ADMINISTRACION DEPARTAMENTO DE CIENCIAS
CALCULO INTEGRAL EN VARIAS
VARIABLES REALES
LUIS ALVARO S ALAZAR SAI AZAR
MANIZALES, OCTUBRE 1992

Autor Luis Alvaro Salazar Salazar Lic. en Matemáticas, Ms. Se. Profesor Asociado Universidad Nacional de Colombia Seccional Manizales
Revisado por: Profesor Germán Cantor Vargas, Lic. en Matemáticas Profesor Alvaro Estrada Mejía., Ing. Civil, Ms. Se. Profesor Alonso Salazar Caicedo, Lic. en Matemáticas
Impreso pon Centro de Publicaciones Universidad Nacional de Colombia Seccional Manizales
Octubre de 1992 Segunda Edición

PRESENTACION
Es satisfactorio para las Directivas de la Facultad de Ciencias y Administración hacer entrega a la Comunidad Universitaria del texto "CALCULO INTEGRAL EN VARIAS VARIABLES", en una segunda edición que su autor, el Profesor Asociado LUIS ALVARO SALAZAR SALAZAR, ha preparado minuciosamente, haciendo gala de su dedicación y capacidad pedagógicas que han merecido reconocimiento en nuestro medio, así como su afán de perfección que lo ha llevado a reconsiderar el estilo de presentación de algunos temas, tratados en la primera edición, para ajustarse más a las necesidades específicas de los estudiantes y los currículos, constituyéndose en un ejemplo que todos los profesores debemos acatar, para consolidar la necesaria transición de la tradición oral a la escrita, con textos que respondan a las necesidades actuales y constituyan una base firme para el desarrollo de la investigación.
NELSON PUERTA GARCIA Director Departamento de Ciencias
Manizales, Octubre 6 de 1992.

TABLA DE CONTENIDO
Introducción de la primera edición. Introducción de la segunda edición.
0. PRELIMINARES 5 0.1 Curvas en el plano y en el espacio 5 0.2 Función longitud de arco 15 0.3 Ejercicio s 19
1. LA INTEGRAL DEFINIDA 21 1.1 Concepto.21
2. LA INTEGRAL DE LINEA 25 2.1 Concepto de trabajo 25 2.2 Definición de integral de línea de un campo vectorial 31 2.3 Propiedades de la integral de línea de un campo vectorial.39 2.4 Integral de línea de un campo escalar 41 2.5 Definición de integral de línea de un campo escalar 45 2.6 Segundo y primero teoremas fundamentales del cálculo para
integrales de línea 51 2.7 Aplicaciones de la integral de línea 70 2.8 Ejercicios 78
v

CALCULO INTEGRAL EN VARUS VARIABLES REALES
3. INTEGRALES MULTIPLES 85 3.1 Integral doble 86 3.2 Volumen de un sólido del espacio con base rectangular apoya-
da en el plano x,y 87 3.3 Definición de integral doble de un campo escalar definido y
continuo sobre un rectángulo 89 3.4 Definición de integral doble de un campo escalar definido y
continuo sobre regiones más generales 95 3.5 Algunas propiedades de la integral doble 103 3.6 La integral doble de campos escalares
con discontinuidades 105 3.7 La integral triple 107 3.8 Definición de integral triple de un campo escalar definido y
continuo sobre un paralelepípedo 108 3.9 definición de integral triple de un campo escalar definido y
continuo sobre sólidos más generales del espacio 111 3.10 Propiedades de la integral triple 121 3.11 La integral triple de campos escalares
con discontinuidades 123 3.12 Teorema de Green en el plano. 125 3.13 Cambio de variable en integrales dobles y triples 133 3.14 Demostración de un caso particular de la fórmula de cambio de
variable 156 3.15 Aplicaciones de las integrales dobles y triples 161 3.16 Ejercicios 168
4. INTEGRALES DE SUPERFICIE 175 4.1 Parametrización de superficies 176 4.2 Area de una superficie 182 4.3 Integral de superficie de un campo escalar 188 4.4 Integral de superficie de un campo vectorial 193 4.5 Teorema de Stokes 1 202
vi

4.6 Teorema de Gauss o de la divergencia 205 4.7 Teorema de Stokes II 209 4.8 Aplicaciones de las integrales de superficie 216 4.9 Ejercicios 220
vi l
INTRODUCCION DELA PRIMERA EDICION
En las diferentes carreras de ingeniería se estudia El Cálculo en Varias Variables Reales como asignatura básica e importante y de la cual los temas del Cálculo Integral aportan herramientas valiosas para el desarro-llo coherente y profundo de otras asignaturas del plan de estudios.
Durante el tiempo en el cual he dictado la asignatura Cálculo III he observado la necesidad de un texto. Los libros que tratan el Cálculo en Varias Variables son de autores extranjeros y están escritos para ambientes universitarios muy diferentes al nuestro. El tratamiento teórico de esos libros es en su gran mayoría muy profundo y serio, pero los aspectos pedagógicos no tienen la orientación que requieren nuestros alumnos de Ingeniería.
Por esta razón no se ha podido adoptar un texto para esta asignatura, o si en alguna ocasión se adoptó alguno, de alguna manera se tergiversaron los objetivos del curso.
Con base en las consideraciones anteriores, he escrito este libro abarcando todos los temas del Cálculo Integral en Varias Variables Reales con la aspiración de que, después de ser complementado con los temas del Cálculo Diferencial y con ejercicios escogidos, sea una base para la elaboración de un texto de la asignatura Cálculo III, que satisfaga de mejor forma las necesidades pedagógicas de nuestras Carreras de Ingeniería, de como hasta ahora lo hayan hecho los otros libros.
Con este orden de ideas en este libro hago aparecer en forma natural los conceptos, deduzco con coherencia pero sin mucha formalidad los algoritmos y los teoremas
ilustrados con ejemplos orientados principalmente hacia las aplicaciones.
El Capítulo 0 trata un tema que no es propiamente de Cálculo Integral en Varias Variables, pero que por no conocerlo en detalle los estudiantes, debe tratarse al iniciar el este curso para evitar tropiezos en el estudio de las Integrales de Línea.
El Capítulo 1 muestra una panorámica de todo el trabajo y tiene el propósito de dar una primera idea intuitiva de los conceptos que más rigurosamente se tratan en los capítulos siguientes.
El Capítulo 2 trata todos los aspectos relacionados con los conceptos de Integral de Línea de Campos Vectoriales y Escalares y sus principales aplicaciones.
El Capítulo 3 se dedica a las Integrales Dobles y Triples y que con una denominación he llamado Inte-grales Múltiples. El cambio de variable en Integrales Múltiples se trata en forma intuitiva por cuanto su formalidad nos desviaría de los propósitos del curso. Sin embargo al final del Capítulo se demuestra un caso particular del Cambio de Variable en Integrales Dobles aplicando el conocido Teorema de Green en el plano.
En el Capítulo 4 me ocup'o del tema de Integrales de Superficie con su resultado más importante suministra-do portas Teoremas de Stokes, Gauss y Green y que recojo en un solo Teorema bajo la denominación de Teorema de Stokes I, con una formulación que pedagógicamente presenta la ventaja de ser más fácil de retener y para el cual los tres Teoremas: Stokes, Gauss y Green son casos particulares.
3

INTRODUCCION DE LA SEGUNDA EDICION
La primera edición de Cálculo Integral en Varias Variables Reaies, se agotó en los años 1989 o 1990 y por la reiterada solicitud de los estudiantes de las carreras de Ingeniería, de una nueva reimpresión o una nueva edi-ción, me propuse la tarea de revisar esa primera edición con el propósito de escribir la segunda edición.
Así en la segunda edición desarrollo los mismos temas algunos de los cuales, después de revisados los amplio en su contenido o modifico su presentación. En la primera edición no propuse ejercicios al lector. En esta segunda edición propongo a! final de los capítulos 0, 2,3 y 4 ejercicios que de ser resueltos por el lector han de permitirle avanzar en la maduración de los conceptos y/ o adquirir las destrezas operacionales necesarias para las futuras aplicaciones en su área de interés.
En el levantamiento de textos y elaboración de gráfi-cos utilicé, gracias a la colaboración del profesor Alfonso Devia C., de la profesora Adela Londoño, directora de la oficina de Recursos Universitarios y el Centro de Publi-caciones, procesadores de palabra, paquetes graficadores y de expresiones matemáticas con los cua-les en esta edición pude lograr niveles de presentación que me satisfacen ampliamente.
La diagramación distribuye cada página en dos colum-nas, en una de las cuales se hace el desarrollo coherente del tema tratado y en la otra se presentan los dibujos, un resumen de los conceptos, teoremas, fórmulas, o co-
mentarios más importantes de la página. Además, las definiciones, teoremas y comentarios más importantes se presentan en letra cursiva.
Agradezco al señor José Luis Rodríguez Santamaría, quien tuvo a su cargo todo el trabajo de diagramación, su valiosísima colaboración en la asesoría sobre el manejo de los paquetes computacionales de edición (DTP). También agradezco a mi familia su inagotable compren-sión y paciencia al soportar mis prolongadas ausencias dedicadas a este trabajo, por eso son meritorios partíci-pes de este logro.
Luis Alvaro Salazar Salazar
4

PRELIMINARES - CURVAS EN EL PLANO Y EN EL ESPACIO
0. PRELIMINARES
0.1 CURVAS EN EL PLANO Y EN EL ESPACIO
La idea que tenemos de curva en el plano es la de la huella que deja la punta del lápiz si la desplazamos apoyada sobre un papel y la idea que tenemos de curva en el espacio es posiblemente la que dibuja en un día soleado sobre el firmamento el humo blanco que despiden los motores de un Jet que viaja a mucha altura. Una circunferencia, una recta, una elipse son curvas del plano. Aunque no son equivocadas estas ideas no nos permiten un manejo útil en los cálculos de muchos aspectos de las mismas. Por eso consideramos una curva en el plano como la imagen de una función de un intervalo de R en R2 y una curva en el espacio como la imagen de una función de un intervalo de R en R3. A dicha función la llamamos una Parametrización de ¡a curva. La ima-gen de una parametrización de R en R2es una curva en el plano y la imagen de una parametrización de R en R3 es una curva del espacio. A dichas parametrizaciones las notaremos con los símbolos Q, B, /y, o, d, & u otros. A la parametrización &(t) de una curva del plano o del espacio también se le llama Trayectoria. Si & es diferenciable se dice que la trayectoria es diferenciable. Si & está definida en un intervalo [a,b] los puntos &(a) y &(b) se dicen extremos de la trayectoria. Si C es la curva descrita por una partícula en movimiento a medida que transcurre el tiempo, una parametrización de C puede ser una función & de R en R2 (o R3) que tenga como variable el tiempo; por lo cual se nota con t la variable de & y se llama parámetro.
una curva en el plano es la imagen de una función de un intervalo de R en R* y una curva en el espacio es la imagen de una función de un intervalo de R en R3. A dicha función la llamamos una Parametrización de la curva.
A la parametrización &(t) de una curva del plano o del espacio también se le llama Trayectoria. Si & es diferenciable se dice que la trayectoria es diferenciable.
Si & está definida en un intervalo [a, b] los puntos & (a) y &(b) se dicen extremos de la trayectoria.
5
De esta manera si & es una parametrización de una curva C del espacio podemos escribir:
&{t)=(&l(t),&2(t),&3(t))
y & ( t ) = ( & 1 ( t ) t & 2 ( t ) ) ,
si & es una parametrización de una curva del plano
l_a función &(t) = A + tV para t en R, es una parametrización de la recta L del espacio, que pasa por el punto A y es paralela al vector V
Como se puede observar, la parametrización &(t) que acabamos de dar para la recta, es la misma ecuación vectorial de la recta que pasa por el punto A y es paralela al vector V
La función &(t) = (Acost, Asent) para A una constante real positiva y 0 s t s 2n es una parametrización de la circunferencia C con centro en el origen y radio A
La parametrización dada para la circunferencia corresponde preci-samente a la descripción de los puntos de la circunferencia en coor-denadas polares, siendo así que por tratarse de tal curva (r es constante, en nuestro caso r = A) dicha descripción depende solo del ángulo, el cual en este caso hemos llamado t
La Función &(t) = (Acost. Asent, Bt), para A una constante real positiva, B una constante real diferente de cero y t un número real cualquiera, es una parametrización de la curva C del espacio descrita por un punto (X Y, Z) que gira alrededor del eje Z a una distancia constante A y simultáneamente se desplaza verticalmente en tal forma que su componente Z es proporcional al ángulo de revolución La curva C se llama hélice circular

FRhJ.IMIN \RhS < I RV AS h\ El PI ANO > EN EL ESPACIO
La parametrización de un segmento de recta en el plano o en el espacio se puede dar utilizando la parametrización de una recta con el parámetro en un intervalo adecuado así
&(t) = A + tV para t 0 £ t <; 11 d o n d e &(to) y ) son los extremos del segmento
Si la solución deseada es más exigente en el sentido de establecer de antemano que el parámetro varíe en un intervalo [a, b] podemos dar una parametrización del segmento que une dos puntos A y B de la siguiente forma
c r(s) = A + s(B - A) con O s s s l J Ahora, como deseamos que a ¡s t s b buscamos qué relación puede
tener t con s para reemplazar en la parametrización s en términos de t
Veamos:
Si a s t s b, entonces
como b > a, entonces
0 <: t -a <: b -a,
OssI -L-a ^ i b - a
Así podemos relacionar a t con s de la siguiente forma
o _ t - a ~ ü ' b - a
La parametrización de un segmento de recta en el plano o en el espacio se puede dar utilizando la parametrización de una recta con el parámetro en un intervalo adecuado así:
&(t) = A + tV para t o ^ t ^ t i d0lnde
&(to) y & ( t i )
son los extremos del segmento.
i

CALCULO INTEGRAL EN VARIAS VARIABLES REALES
obteniendo la parametrización deseada:
' &(t) = A + - A), con t en [a,b] >
b - a y
la cual después de simplificada se puede escribir así:
&(t) = t - a b - a
B t - b b - a
A, con t en [a, b]
Una curva C continua del plano o del espacio con una parametrización & definida en un intervalo [a, b] se dice suave o lisa, si existe & '(t) y es continua en el intervalo abierto (a, b) y &'(t) es diferente de cero para t en el intervalo abierto (a, b).
Una curva C continua del plano o del espacio con una parametrización & definida en un intervalo [a, b] se dice suave o lisa, si existe &'(t) y es continua en el intervalo abierto (a, b) y & '(t) es diferente de cero para t en el intervalo abierto (a, b). Para tener una idea gráfica del significado de curva suave o lisa volvemos a nuestra interpretación de la curva como el trazo de una partícula en movimiento para lo cual la parametrización &(t) tiene como variable el tiempo t.
Cuando estemos en el instante tff la partícula estará en el punto Scftg) de la curva y cuando estemos en el instante t, la partícula estará en el punto & (t) de la curva y la velocidad media con la cual se ha desplazado la partícula en el tiempo t - tff será:
Si t tiende atg, la velocidad media se convierte en velocidad instantánea, o sea el límite cuando t tiende a tgde
& ( 0 - &(tp) t - t0
es la velocidad instantánea de la partícula en el punto &(tg) pero también es la derivada de&(t) en el valor t0
( & V )
&(t) - &(tp) t - t0
Si t tiende a t0, la velocidad media se convierte en velocidad instan-tánea, o sea el límite cuando t tiende a t0de
&(t) - &(t0) t - í o

PRELIMINARES - CURVAS EN EL PLANO Y EN EL ESPACIO
es la velocidad instantánea de la partícula en el punto &(tj pero también es la derivada de &(t) en el valor t0 (& '(tj)
Hasta ahora & '(h) es el vector velocidad instantánea de la partícula en &(lo). El vector &(t) - &(to) es paralelo a la recta L que pasa por los puntos &(t) y &(t0) entonces el vector
&(t) - &(tp) t -10
es también paralelo a L. Cuando t tiende a to la recta L se convierte en la recta tangente a la curva C en el punto &(to) y
&(t) - &(tp) t - 1 0
se convierte en & '(h) que ahora será paralelo a la recta tangente L. En conclusión &'(toj es el vector velocidad instantánea de la partícula en el punto &(k>) y & '(k>) es paralelo a la recta tangente a la curva C en el punto &(k>).
Así para una parametrización diferenciable & de una curva C, llamaremos vector velocidad de C en & (t) al vector &'(t) y llamaremos rapidez de C en &(t) a la longitud de & '(t), es decir, rapidez de C en &(t) es
II &'(t) II
&'(to; es el vector velocidad instantánea de la partícula
en el punto y es paralelo a la recta tangente
a la curva C en el punto & (to/
Para una parametrización diferenciable & de una curva C, llamaremos vector velocidad de C en & (t) al vector &'(t) y llamaremos rapidez de C en &(t) a la longitud de & '(t), es decir, rapidez de C en & (t) es
II &'(t) II

CALCULO INTEGRAL EN VARIAS VARIABLES REALES
El vector velocidad de C es un vector tangente a la curva con longitud la rapidez de C.
Una curva C es suave o lisa si es continua y tiene vector velocidad tangente no nulo en todos sus puntos.
Una curva deja de ser lisa o suave en un punto si no tiene vector velocidad en ese punto en cuyo caso su gráfica presenta en ese punto un «pico».
Una cun/a deja de ser lisa o suave en un punto si la rapidez en ese punto es cero, es decir, la velocidad en ese punto no tiene dirección lo cual gráficamente signi-fica también que la curva tiene en ese punto un «pico»
El vector &'(to) trasladado al punto &(to) es un vector tangente a la curva C en ese punto con longitud II &'(t) II, o sea, el vector velocidad de C es un vector tangente a la curva con longitud la rapidez de C.
Podemos entender entonces de otra forma el significado de la curva suave o lisa: Una curva C es suave o lisa si es continua y tiene vector velocidad tangente no nulo en todos sus puntos.
Así una curva deja de ser lisa o suave en un punto si no tiene vector velocidad en ese punto en cuyo caso su gráfica presenta en ese punto un «pico», porque la recta tangente no tiene vector dirección.
La curva C con parametrización
f \
B(t) = ( t, t + 2 ) , si -2 < t < - l .
( t, r ) , si -1 < t < 2 . l
FIGURA 0.1 Esta curva no es lisa en el punto (-1, 1).
10
es una curva continua en todo el intervalo [-2,2], pero no existe B'H). porque por la derecha es (1,-2) y por la izquierda es (1,1).
En la figura 0.1 mostramos la gráfica de C y se ve claramente que tiene un pico en el punto (-1,1).
También una curva deja de ser lisa o suave en un punto si la rapidez en ese punto es cero, es decir, la velocidad en ese punto no tiene dirección lo cual gráficamente significa también que la curva tiene en ese punto un «pico», porque la recta tangente en ese punto no esta definida.
La hipocicloide de cuatro cúspides cuya parametrización es:

PRELIMINARES - CURVAS EN EL PLANO Y EN EL ESPACIO
B (t) = ( cos3( t ) , sen3( t ) ) con 0 < t < 2rc
es continua y tiene vector velocidad
B'(t) = (-3 eos21 sen t, 3 sen21 eos t) con 0 ¿ t s 2n
Gráficamente una curva es suave o lisa si no se interrumpe y no presenta o no tiene «picos».
Si una curva C no es lisa pero se puede partir en curvas lisas, la curva C se llama suave o lisa a trozos.
en todos los puntos, pero Í3'( n/2) = (0,0), Í3'( n ) = (0,0); G'(3n/2) = (0,0) y Í3'(0) = (0,0). Lo cual significa que en los puntos G(0), l3(n/2), (3(n) y 8(3n/2) la gráfica presenta picos.
En la figura 0.2 mostramos la gráfica de la hipocicloide de cuatro cúspides.
Si una curva C no es continua en un punto, deja de ser suave en ese punto y gráficamente esto hace que la curva se «interrumpa» en ese punto.
En resumen, gráficamente una curva es suave o lisa si no se interrumpe y no presenta o no tiene «picos».
Las curvas presentadas en las figuras 0.1 y 0.2 no son lisas pero se pueden partir de tal forma que los trozos de curva que resultan al partirlas, sean suaves o lisos. En el caso de la figura 0.1, la curva se puede partir en dos curvas suaves: el segmento de la recta y el arco de parábola. La curva de la figura 0.2 se puede partir en cuatro curvas lisas si tomamos los puntos donde hay «picos» como puntos de corte.
Si una curva C no es lisa pero se puede partir en curvas lisas, la curva C se llama suave o lisa a trozos. Así que las curvas de las figuras 0.1 y 0.2 son curvas suaves o lisas a trozos. En adelante trabajaremos con curvas lisas o lisas a trozos a menos que se diga lo contrario.
• x
FIGURA 0.2 Esta curva no es lisa en los puntos (1,0), (0,1), (-
1,0) y (0,-1)
Los triángulos y los rectángulos son curvas lisas a trozos. Veamos como parametrizar el rectángulo con vértices (0,0), (2,0), (2,1) y (0,1). La parametrización se desea tal que recorra los vértices en el orden que se han dado. Empecemos entonces parametrizando el segmento de recta que une los puntos (0,0) y (2,0). Una parametrización para ese segmento es
Bi ( t ) =( t , 0 ) para 0<;ts;2
Ahora parametricemos el segmento que une los puntos (2,0) y (2,1). Una parametrización para este segmento es
B 2 ( t ) = (2 , t - 2 ) para 2 s t ^ 3
Con los dos lados del rectángulo que ya tenemos parametrizados hemos respetado el deseo de que partamos de (0,0) pasando luego por (2,1) sin ningún tropiezo. La parametrización del segmento que une a (2,1) con (0,1) no es tan evidente con la exigencia dada. Por ejemplo la parametrización
6 ( t ) = ( t - 3, 1 ) con 3 < t < 5
no satisface la exigencia por cuanto que parte del punto (0,1) y termina en el punto (2,1). Una parametrización para este segmento que satis-face la exigencia dada es
t ) = ( 5 - t, 1 ) con 3 < t < 5
por cuanto que
B3(3) = ( 2, 1 ) y lk(5) = ( 0, 1 )
PRELIMINARES - CURVAS EN EL PLANO Y EN EL ESPACIO
Con el segmento que une los puntos (0,1) y (0,0) se tiene la misma dificultad. Así por ejemplo la parametrización
6 ( t ) = ( 0, t - 5 ) con 5 < t < 6
no satisface la exigencia de partir del punto (0,1) y llegar al punto (0,0) por cuanto que
13(5) = ( 0, 0 ) y 13(6) = ( 0, 1 ).
La parametrización
B4( t ) = (0, 6 - 1 ) con 5 < t < 6
si satisface la exigencia dada.
En nuestro propósito de parametrizar ese rectángulo hemos utilizado
cuatro funciones de R en R2:
fih fe, 63 y 64.
Podemos resumir lo anterior en una sola función que sea la parametrización de ese rectángulo así:
m =
(t , 0 ) , ú 0 ^ t < 2 . (2, t - 2 ) , si 2 < t < 3 . (5 -1 ,1 ) , á 3 < t < 5.
>
. (0,6 - 1 ) , si 5 í; t < 6. -i
13

CALCULO INTEGRAL EN VARIAS VARIABLES REALES
Para los propósitos de nuestro estudio es muy impor-tante en cada curva señalar o determinar la orientación que se desea y de esta misma forma buscar la parametrización que satisfaga esa orientación.
f 1
(0,1)
3 (0,0) (2.0)
FIGURA 0.3 Curva suave a trozos recorrida en el sentido
opuesto de las agujas del reloj.
14
Como ya lo analizamos esta parametrización si satisface la exigencia de recorrer los vértices en el orden (0,0), (2,0), (2,1), (0,1) y (0,0).
En la figura 0.3 mostramos el rectángulo parametrizado e indicamos con una flecha la manera como deseamos que sea recorrido o descrito por la parametrización.
En el ejemplo que se acaba de desarrollar se intenta también mostrar otro aspecto muy importante de las curvas del plano o del espacio y que debe ser satisfecho por la parametrización. Se trata de la orientación ó forma como se desea que la parametrización recorra la curva cuando en su dominio el parámetro avance «de menor a mayor».
Para los propósitos de nuestro estudio es muy importante en cada curva señalar o determinar la orientación que se desea y de esta misma forma buscarla parametrización que satisfaga esa orientación.
Aunque en los otros ejemplos no dimos importancia a la orientación, se observa que las parametrizaciones dadas las recorren con alguna orientación que inconscientemente se fijó al buscar la parametrización. En muchos problemas puede encontrarse implícita la orientación de la curva, pero cuando esto no suceda debe darse explícitamente para evitar resultados equivocados.

0.2 FUNCION LONGITUD DE ARCO
En el curso de Cálculo Integral en una variable aprendimos que si C es la gráfica de una función definida por la ecuación
y = f (x) , con asxs ;b , (f continua)
La longitud S de la curva C está dada por la expresión:
Si parametrizamos la curva C, podemos obtener S de otra forma en términos de la parametrización.
Sea
x = X(t ) ; y =Y(t) parat e n p o , t i ]
una parametrización de la curva C Llamemos 6(t) a esa

CALCULO INTEGRAL EN VARIAS VARIABLES REALES
parametrización, es decir,
Pero ß(t) =( x(t), Y(t) ) con tostasti
Y por la regla de la cadena
luego
y,(t) = f = l f = y , ( X ) X , ( t ) ;
y v ' x'(t)
Entonces f'(x) la podemos escribir
y después de reemplazar y simplificar, la fórmula de la longitud S de la curva C es:
/-t-i S = V(X ' ( t ) ) 2 + ( V ( t ) ) 2 d t , ó ,
" 0
16
PRELIMINARES - FUNCION LONGITUD DE ARCO
s = f V ( u ) | | d u J tn
La longitud del segmento de curva desde
G(to) hasta B(t) para t o < t ^ t i ,
valor que depende de t es:
s ( t ) = f V ( u ) | | d u A
Como para cada valor de t del intervalo cerrado [t0, t j , S(t) asocia otro número real llamado la longitud de arco desde Í3(t0) hasta (3(t), definimos la función S por:
con dominio [t0, t,] y recorrido un subconjunto de R, y la llamaremos Función Longitud de Arco.
Al aplicar el Primer Teorema Fundamental del Cálculo a la Función Longitud de Arco par calcular su derivada obtenemos que
S ' ( t ) = l l 6 ' ( t ) II
resultado este que será muy importante en nuestro tratamiento de Integral de Línea de un campo escalar.
Si cambiamos la notación podemos escribir la derivada de la Función
Definimos la función S por:
con dominio [t0, t,] y recorrido un subconjunto de R, y la llamaremos Función Longitud de Arco.
17
CALCULO INTEGRAL EN VARIAS VARIABLES REALES
Longitud de Arco así:
¿S. = || fi'(t) II dt
de donde obtenemos la Diferencial de Longitud de Arco
^ dS = II fí'(t) II dt J
presentación esta que explicará la notación de la Integral de Línea para campos escalares.
Diferencial de Longitud de Arco
dS = l lß ' ( t ) l l d t )
18

0.3 EJERCICIOS.
1. Parametrice el segmento de recta que se inicia en el punto (0,0,0) y termina en el punto (1,1,1), recorrido en ese sentido.
2. Parametrice la elipse
recorrida en sentido antihorario.
3. Parametrice la parábola y = x 2 , z = 2 desde x = -2 hasta x = 2 .
4. Parametrice la curva intersección del cilindro circular recto x2 + y2 = 4 c o n e | piano z = 2y, recorrida en sentido antihorario vista desde el eje z positivo.
5. Parametrice la circunferencia que pasa por los puntos (1,-1), (1,1) y (-3,-3), recorrida en sentido horario.
6. Parametrice el triángulo con vértices (-5,0,1), (0,2,0) y (5,-2,-1) recorrido en ese orden.

7. Parametrice el rectángulo con vértices (1,0), (0,1), (-3,-2) y (-2,-3) recorrido en ese orden.
8. Demuestre que la función longitud de arco es una función inyectiva.
9. Parametrice la parte de la hipérbola.
X2 - Y2 = 1
que se inicia en el punto (1, 0) y termina en el punto (4.VT5)
\
LA INTEGRAL DEFINIDA - CONCEPTO
1. LA INTEGRAL DEFINIDA
1.1 CONCEPTO
Se intenta en este capítulo dar al lector una visión elemental, superficial y general de todos los capítulos posteriores. Por eso no debe preocuparse si algunas ideas no las entiende o no le son muy claras, porque posteriormente se precisarán y formalizarán más los conceptos y se explicarán con más detalle.
Así que en este capítulo no daremos las definiciones de Integral de Línea, Integral Doble, Integral Triple o Integral de Superficie sino una idea intuitiva de esos conceptos.
Hasta ahora nuestro conocimiento sobre la INTEGRAL DEFINIDA está relacionado con el símbolo,
donde f es una función continua en el intervalo cerrado [a, b] o simplemente f es acotada en el intervalo [a, b] con un número finito de discontinuidades.
f (x) dx
21

CALCULO INTEGRAL EN VARIAS VARIABLES REALES
Además,
f (x) dx
es un número real cuya definición se puede dar de distintas formas una de las cuales es:
donde x0 = a <x1 < x2 < . . . < x n . ^ < xn = b ,
x k . ! <c k < xk para k = 1, 2 , . . . , n
y cuando el límite de la derecha existe.
Para abreviar un poco la notación y dar una idea más natural de esta definición, llamemos
y observemos que si n tiende a infinito, entonces A x k tiende a cero con lo cual podremos escribir
A x k = ( xk - xk_ i )
f (x) dx= 0 I K k - 1
n b
f M * - A x ! ! % I L, _ 1 k = 1
22
LA INTEGRAL DEFINIDA - CONCEPTO
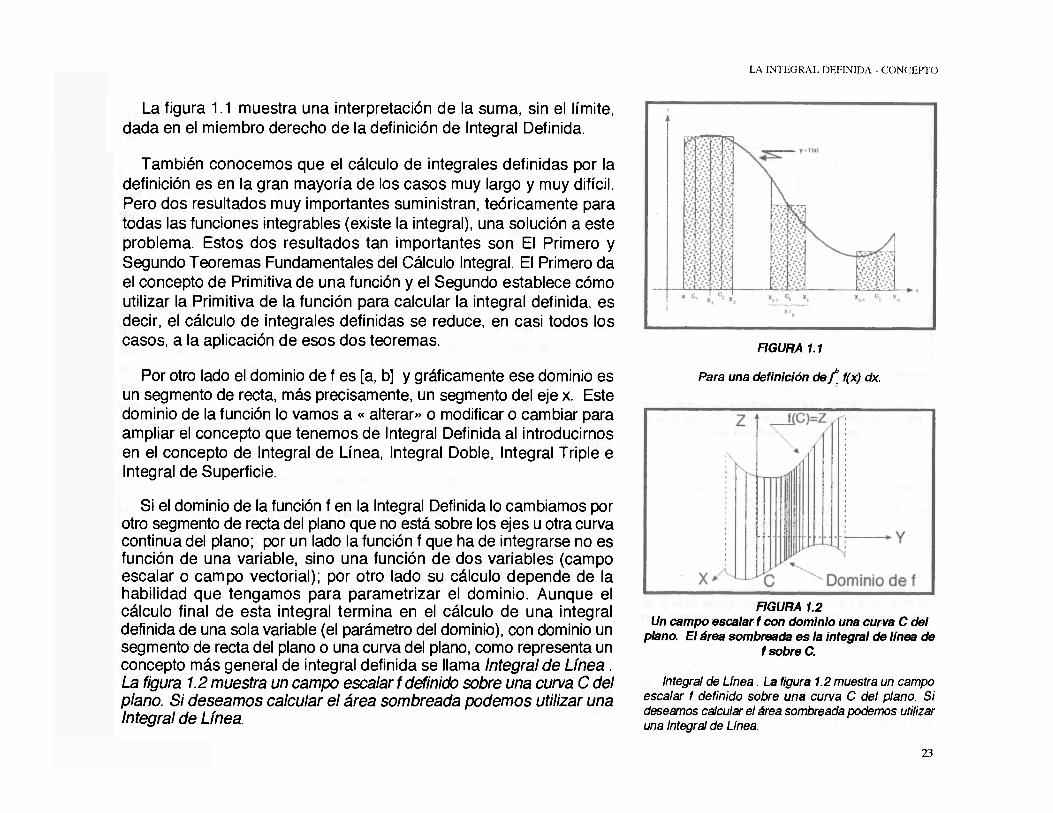
La figura 1.1 muestra una interpretación de la suma, sin el límite, dada en el miembro derecho de la definición de Integral Definida.
También conocemos que el cálculo de integrales definidas por la definición es en la gran mayoría de los casos muy largo y muy difícil. Pero dos resultados muy importantes suministran, teóricamente para todas las funciones integrables (existe la integral), una solución a este problema. Estos dos resultados tan importantes son El Primero y Segundo Teoremas Fundamentales del Cálculo Integral. El Primero da el concepto de Primitiva de una función y el Segundo establece cómo utilizar la Primitiva de la función para calcular la integral definida, es decir, el cálculo de integrales definidas se reduce, en casi todos los casos, a la aplicación de esos dos teoremas.
Por otro lado el dominio de f es [a, b] y gráficamente ese dominio es un segmento de recta, más precisamente, un segmento del eje x. Este dominio de la función lo vamos a « alterar» o modificar o cambiar para ampliar el concepto que tenemos de Integral Definida al introducirnos en el concepto de Integral de Línea, Integral Doble, Integral Triple e Integral de Superficie.
Si el dominio de la función f en la Integral Definida lo cambiamos por otro segmento de recta del plano que no está sobre los ejes u otra curva continua del plano; por un lado la función f que ha de integrarse no es función de una variable, sino una función de dos variables (campo escalar o campo vectorial); por otro lado su cálculo depende de la habilidad que tengamos para parametrizar el dominio. Aunque el cálculo final de esta integral termina en el cálculo de una integral definida de una sola variable (el parámetro del dominio), con dominio un segmento de recta del plano o una curva del plano, como representa un concepto más general de integral definida se llama Integral de Línea . La figura 1.2 muestra un campo escalar f definido sobre una curva C del plano. Si deseamos calcular el área sombreada podemos utilizar una Integral de Línea.
FIGURA 1.1
Para una definición de f f(x) dx.
FIGURA 1.2 Un campo escalar f con dominio una curva C del
plano. El área sombreada es la integral de línea de f sobre C.
integral de Línea. La figura 1.2 muestra un campo escalar f definido sobre una curva C del plano. Si deseamos calcular el área sombreada podemos utilizar una Integral de Línea.
23

CALCULO INTEGRAL EN VARIAS VARIABLES REALES
FIGURA 1.3 Un campo escalar definido sobre una región R del plano. En este caso el volumen del sólido S es la
integral doble sobre R de f.
Integral Doble . La figura 1.3 muestra un campo escalar f sobre una región R del plano limitada por una curva C. Si deseamos calcular el volumen del sólido S limitado por las superficies Z = 0,Z = f(x,y), y el cilindro recto con generatriz C, podemos utilizar una Integral Doble.
Otra forma de calcular el volumen del sólido mostra-do en la figura 1.3 es calcular la integrai triple sobre S del campo escalar g definido por g(X) = 1, para todo X en
Esta integral se llama Integral de Superficie. Si llamamos Tala superficie Z- f(x,y) mostrada en la figura 1.3, el área de esa superficie Tes la Integral de Super-ficie sobre T de la función h(X) = 1, para todo X en T.
Si ahora cambiamos el dominio de ese campo escalar f por una región del plano, la integral definida, cuyo cálculo también termina en un integral definida de una sola variable, representa también otro concepto más general de integral definida y se llama Integral Doble. La figura 1.3 muestra un campo escalar f sobre una región R del plano limitada por una curva C. Si deseamos calcular el volumen del sólido S limitado por las superficies Z = 0, Z = f(x,y), y el cilindro recto con generatriz C, podemos utilizar una Integral Doble.
Ahora cambiaremos el dominio del campo escalar por una región del espacio, o sea, un solido S. También la integral definida termina en una integral de una sola variable y por tener ese dominio se llama Integral Triple. No nos es posible representar gráficamente la situación por cuanto que dicha representación deberíamos hacerla en R4. Sin em-bargo, podemos mencionar al menos un ejemplo que nos da una idea de ese concepto de Integral Triple. Otra forma de calcular el volumen del sólido mostrado en la figura 1.3 es calcularla integral triple sobre S del campo escalar g definido por
g(X) = 1, para todo X en S.
También con un campo escalar f con dominio una superficie T de R3
se puede hablar de integral de f sobre la superficie T. Esta integral se llama Integral de Superficie. Si llamamos T a la superficie Z = f(x,y) mostrada en la figura 1.3, el área de esa superficie T es la Integral de Superficie sobre T de la función
h(X) = 1, para todo X en T.
Esta ampliación del concepto de Integral Definida a los de Integral de Línea, Integral Doble, Integral Triple e Integral de Superficie, sus relaciones y aplicaciones será lo que desarrollaremos con más detalle en los capítulos siguientes de este libro. Lo que hemos dado en este capítulo es una visión general e intuitiva con los ejemplos más simples, como ya lo anunciamos al principio.
24

LA INTEGRAL DE LINEA - CONCEPTO DE TRABAJO
2. LA INTEGRAL DE LINEA
2.1 CONCEPTO DE TRABAJO
De la Física sabemos que si un cuerpo S se desplaza en línea recta de un punto A a otro punto B movido por la acción de una fuerza constante F, el número real
F»(B - A )
se llama el trabajo de la fuerza F en el trayecto B - A y se nota con el símbolo W, es decir,
w = F* (B - A)
Cuando la fuerza F no es constante o el desplazamiento no es recto, la definición anterior de trabajo no es apropiada, pero podemos utilizarla para dar otra definición más general y apropiada de trabajo. Para esto llamemos C a la curva descrita por el cuerpo S por la acción de la fuerza no constante F. Sea R(t) una parametrización de C para a =s t <; b, es decir, R(a) = A y R(b) = B. Para obtener una aproximación del trabajo de F sobre S en la curva C, sea
t e = a < t 1 < . . . < t n = b w = F ® ( B - A )
25

una partición del intervalo [a, b]. Así los puntos
RCa^RCt,), . . . » R C t ^ R C b ) ,
determinan una poligonal que aproxima la curva C. Si tomamos en el intervalo [a, b] valores
C1fC2,...,Cn, tales que
y tomamos valores de F en
RCC1),RCC2),. . . ,R(C n l ) , R ( C n ) ,
podemos calcular el trabajo de
F(R(Ck))
en el trayecto
desde R (tk1) hasta R (tk)
para cadak = 1,2 n.
Este trabajo de F(R(CK)) en el t rayecto R(tk) - R( t k . i ) es:
F(R(C k )> CR(tk) - RCt k ) )

LA INTEGRAL DE LINEA - CONCEPTO DE TRABAJO
y entonces una «buena» aproximación del trabajo que queremos calcular es *
£ F(R(CK )W(R( t k ) - R(tk.-,)) k = 1
La figura 2.1 ilustra la situación descrita hasta ahora .
Suponemos la curva C suave en cada segmento de la poligonal.
El vector
R(tk) - R(tk.-|)
se puede expresar utilizando lo que ya hicimos en la sección 0.1 (preliminares) según lo cual el segmento de recta
del p u n t o R( t k - i ) al pun to R(tk)
se puede parametrizar así:
FIGURA 2.1 El trabajo de F desde A hasta B se puede aproxi-
mar por el trabajo a través de una poligonal.
&(t) = t k " tk-1
^ - R ( t k ) - 1 ' t k R ( t k . i ) t k - t k - i
con t en [ t k - i , t k ]
O - Nótese que F(R(Ck)) es constante desde R ^ . hasta RCt̂ ). - Los intervalos son muy pequeños.
27

CALCULO INTEGRAL EN VARIAS VARIABLES REALES
28
y entonces
& ' ( t ) = ] R ( t k ) - í R ( t f c - i )
t k - t k - i t k - t k - i
o
& ' ( t ) = — J ( R ( t k ) - R ( t k - i ) ) t k - t k - 1
de donde se obtiene que
R ( t k ) - R ( t k - i ) = B ' ( t ) ( t k - t k - i )
c o n t e n [ t k - i , t k ]
Así la suma
n
I F (R ( C K ) W (R ( t k ) - R ( t k - i ) )
k = 1
la podemos expresar en la forma
n
l F(R(CK))#S' (t) (tk - tk-i) k = 1
Como ya lo dijimos esta suma es una «buena» aproximación del trabajo de F a través de C y el carácter de «buena» depende del número

LA INTEGRAL DE LINEA - CONCEPTO DE TRABAJO
n, de tal manera que si n es muy «grande» el error por esta aproxima-ción es muy «pequeño», y para condiciones especiales de F, por ejemplo F es un campo de fuerzas continuo sobre C, si n tiende a infinito el error de la aproximación tiende a cero y entonces el trabajo de F sobre Ces:
W = IÍToo Z F ( R < C K ) ) . B ' ( t ) ( V t * 1 ) k = 1
Cuando n tiende a infinito la poligonal se confunde con la curva C y por consiguiente la parametrización R de la curva se confunde con la parametrización de la poligonal.
Además si llamamos Atk = t k - t k - i , tenemos que si n tiende
a infinito A tic—-O y entonces
n
w = 0 X F(R(Ck))®R' ( t ) A t k
k = 1
De acuerdo con la definición dada al empezar 1., de integral definida, el límite de la derecha es:
í F (R ( t ) ) • R' ( t ) d t
n w = X f(r(Ck))*R' ( t )At k
29
CALCULO INTEGRAL EN VARIAS VARIABLES REALES
La definición de trabajo de una fuerza F sobre una curva Ces:
w = I F(R(t)) • R' ( t ) d t
30
Con lo anterior concluimos que el trabajo W de F sobre C es:
W = I F(R(t)) • R' ( t ) d t
donde R(t) es una parametrización de C con t en [a, b]. De esta forma nos queda justificada la definición de trabajo de una fuerza F sobre una curva C como
W = I F(R(t)) • R' ( t ) d t
Esta definición es mas general y apropiada que la dimos al comenzar esta sección puesto que también incluye esa definición.
* NOTA No confundir esta R con el conjunto de los números reales.

LA INTEGRAL DE LINEA - DE UN CAMPO VECTORIAL - PROPIEDADES
2.2 DEFINICION DE INTEGRAL DE LINEA DE UN CAMPO VECTORIAL.
En la sección anterior definimos el trabajo W de una fuerza F a lo largo de una curva C como
La integral que aparece a la derecha, es una integral definida de la función real F(R(t))*R'(t) de una sola variable. Con esta motivación daremos enseguida una definición de integral de línea de un campo vectorial.
Sea C una curva con parametrización R(t) definida en [a, b]. Sea F un campo vectorial definido y acotado en C. La integral de línea de Falo largo de C, representada por el símbolo
W = F(R(t)) • R' ( t ) dt
31

CALCULO INTEGRAL EN VARIAS VARIABLES REALES
Un campo vectorial F se dice acotado en C si existe un número real positivo M tal que para todo X en C, se tiene que
II F(X) II < M
Sea C una curva con parametrización R(t) definida en [a, b]. Sea F un campo vectorial definido y acotado en C. La integral de línea de Falo largo de C, representada por el símbolo
F • dR
se define por la ecuación
j F • dR = j F(R(t)) • R' (t) dt
cuando la integral de la derecha exista.
32
se define por la ecuación
j F*dR = j F(R(t)) • R' ( t ) d t
cuando la integral de la derecha exista.
En esta definición hemos seleccionado el campo vectorial F entre bs que se dicen acotados en C.
Un campo vectorial F se dice acotado en C si existe un número real positivo M tal que para todo X en C, se tiene que
II F(X) II < M Si el campo vectorial F lo expresamos de ia forma
F(x,y) = P(x,y) T + Q ( x , y ) f
y la parametrización de C es
R ( t ) = X ( t ) f + Y ( t ) f
con lo cual , entonces
| F(R(t)) • R'(t) dt = ^ ( P ( R ( t ) ) X ' ( t ) + Q ( R ( t ) ) Y , ( t ) ) d t

LA INTEGRAL DE LINEA - DE UN CAMPO VECTORIAL - DEFINICION
•L P(x ,y )dx+ Q(x,y) dy
porque si x =X( t ) e y = Y ( t ) , entonces
£ - *'<«> • £ " V«)-
de I o cual resu l taque d x = X ' ( t ) d t ; d y = Y ' ( t ) d t
lo que explica la notación de integral de línea del campo
F(x,y) = p f + Qj*
sobre la curva C como
P dx + Q d y í
y si F = P i + Q j + R k |a notación
P dx + Q d y + R dz L para la integral de línea de F sobre C.
Es importante advertir que siendo P, Q y R funciones de dos variables o tres variables en las expresiones

CALCULO INTEGRAL EN VARIAS VARIABLES REALES
Í P dx + Q d y
I P dx + Q d y + R dz
cada una está representando un número real fijo y por consiguiente, es equivocada la interpretación:
I P dx+ Qdy = I P (x , y) dx +J Q(x, y) dy
I. Pdx+Qdy+Rdz =
= j P(x, y, z)dx +1 (x, y, z) dy + j R (x, y, z)dz
queriendo significar con esto que la función P se integre «parcialmente» con respecto a x, la función Q se integre «parcialmente» con respecto a y, y la función R se integre «parcialmente» con respecto a z. Interpretación según la cual cada una de esas integrales de línea será una función de dos o tres variables lo que riñe con la definición de integral de línea.
La interpretación correcta es entonces:
34
LA INTEGRAL DE LINEA - DE UN CAMPO VECTORIAL - PROPIEDADES
j Pdx + Qdy [P(X(t),Y(tfy[ ' (t ) + Q (X (/ ), Y (t))Y '(t)]dt
i P dx + Qdy + R dz
• f > P(X(t ), Y(t ), Z (t))X '(t) + Q (X(t ), V(t ), Z (í )) V ' (t ) +
R(X(t ), Y(t),Z (t ))Z '(t ) ] dt
si la curva C tiene parametrización
B(t) = (X(t), Y(t)) o B(t) = (X(t), Y(t), Z(t)), respectivamente, con t en [a,b]
Lo anterior lo podemos resumir en las siguientes igualdades:
F • dR = I P d x + Q d y IC Je
rb F(R(t)) • R' ( t ) d t
/a
le'""-le • f
• f
F • dR = I P d x + Q d y + R d z 'c Je
rb F(R(t» • R' ( t ) d t
ra
F • dR = I P d x + Q d y IC Je
rb F(R(t)) • R1 ( t ) d t
/a •i:
• i
F • dR = I P dx +Qdy +R dz IC Je
rb F(R(t)) • R' (t) dt
l a
35

CALCULO INTEGRAL EN VARIAS VARIABLES REALES
Si la curva C tiene parametrízación R(t) para t en un intervalo cerrado [a, b] y si R(a) = R(b), la curva C se dice cerrada y la integral de línea de F sobre C se acostumbra a notar con
F-dR
De la misma forma que motivamos la definición de integral de línea de un campo vectorial con el concepto de trabajo, ilustraremos esta definición con un ejemplo en el cual utilizaremos la integral de línea para calcular un trabajo.
Sea C la curva intersección de la esfera
(X + A ) 2 + Y 2 + Z 2 = 4 A 2
y el cilindro X 2 + Y2 = A 2 para Z > 0 y A > 0
El campo de fuerzas
X, Y, Z ) = ( Y 2 , Z 2 , (X + A ) 2 )
Si la curva c tiene parametrízación R(t) para t en un moverá una partícula sobre la curva C en sentido horario desde el eje intervalo cerrado [a, b]ysi R(a)=R(b), la curva c se dice z por encima del plano-xy, hasta que la partícula de una vuelta completa cerrada y la integral de línea de F sobre C se acostumbra a notar con
El cálculo del trabajo requiere que parametricemos primero la curva C.
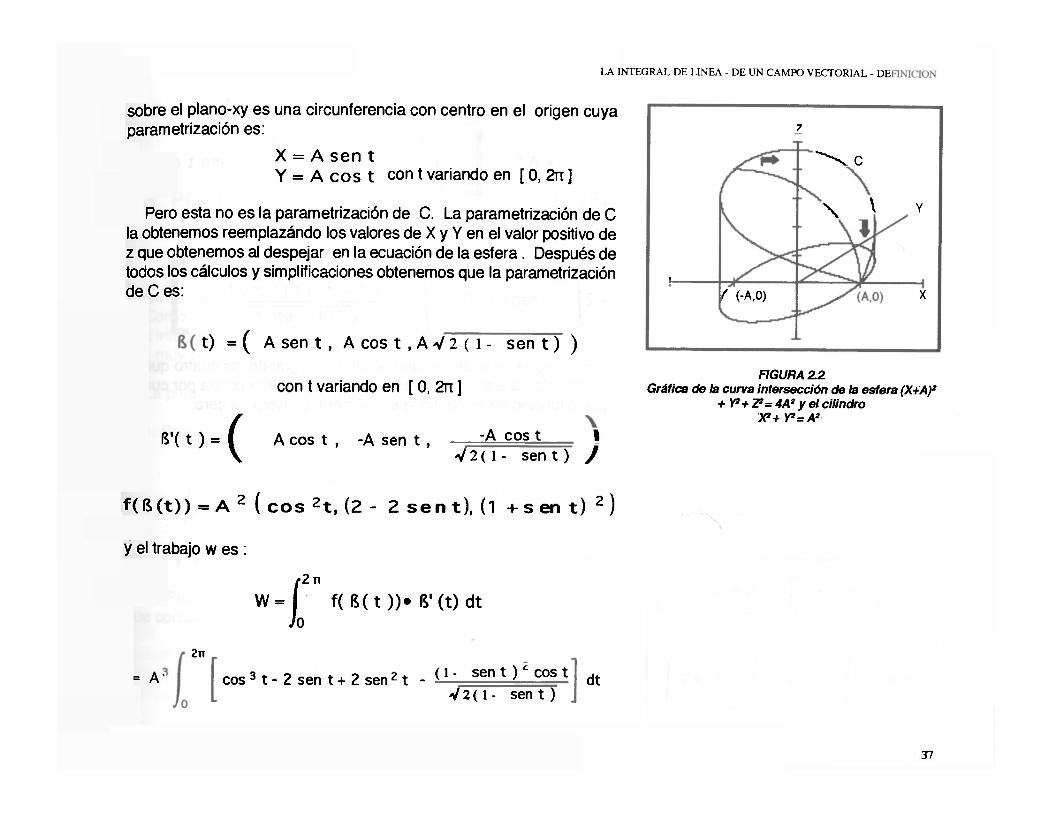
Para comprender mejor la parametrízación que daremos, observe-mos en la gráfica de la curva C, dada en la figura 2.2, que su proyección
F'dR
36
LA INTEGRAL DE LINEA - DE UN CAMPO VECTORIAL - PROPIEDADES
sobre el plano-xy es una circunferencia con centro en el origen cuya parametrización es:
X = A sen t Y = A eos t con t variando en [ 0, 2n ]
Pero esta no es la parametrización de C. La parametrización de C la obtenemos reemplazándo los valores de X y Y en el valor positivo de z que obtenemos al despejar en la ecuación de la esfera. Después de todos los cálculos y simplificaciones obtenemos que la parametrización de C es:
t ) = ( A sen t , A eos t , A V 2 ( 1 - sen t ) )
con t variando en [ 0, 2n ]
(A eos t , -A sen t , -A eos t 1 V 2 (1 - sen t ) J
B'( t ) -V 2(1 - sen
f ( f c ( t ) ) = A 2 ( e o s 2 t , ( 2 - 2 s e n t ) , ( i + s en t ) 2 )
y el trabajo w es:
W -f Jo f( S ( t ) ) • 6' ( t ) dt
2n = A' 3 • o • , o ?* ( i - sen t ) eos t eos 3 t - Z sen t + 2 sen ¿ t - i— '
V 2 ( l - sen t ) dt
1
7
X c
\ \ Y
f (-A.0) X
FIGURA 2.2 Gráfica de la curva intersección de la esfera (X+A)2
+ Y*+Z?=4A2yel cilindro X?+ Y*=A3
37

CALCULO INTEGRAL EN VARIAS VARIABLES REALES
38
= A [ i 2 n
COS 3 t dt - 2 f Jo sen t dt
2n í 2TT T + 2¡ sen 2 t dt - ( t > 2 0 0 5 t Ht =2nA3
Jo J 0 V 2( l - s e n t )
Es importante observar que la última integral de las cuatro que se deben calcular para encontrar W, es una integral impropia por cuanto que la función no es continua en n/2 pero converge a cero.

LA INTEGRAL DE LINEA - DE UN CAMPO VECTORIAL - PROPIEDADES
2.3 PROPIEDADES DE LA INTEGRAL DE LINEA DE UN CAMPO VECTORIAL
Como la integral de línea de un campo vectorial la definimos como una integral definida ordinaria, las propiedades de la integral de línea son muy similares a las de la integral definida.
La propiedades más sobresalientes de la integral de línea son:
1. Propiedad de linealidad con respecto al integrando; que consiste en:
j ( b F + cG ) • d&= b j F • dlí + c J G • dfc
para F y G campos vectorial definidos sobre C con parametrización 3.
2. Propiedad de aditividad con respecto a la curva de integración, que consiste en:
| F* dS = | F* dfc+ | F* dfc Je JCi IC2
í ( b F + cG ) • d(5 = F • dB + c i G • cR Je Je Je
¡ F* d&= | F* dS + 1 F* dS Je J Ci lez
39

CALCULO INTEGRAL EN VARIAS VARIABLES REALES
donde F es un campo vectorial definido sobre C con parametrización B definida en el intervalo [a, b] y C, y C2 son tramos de C cuando B toma como dominio a los subintervalos [a, c] y [c, b] respectivamente para algún valor c real tal que a < c < b
3. Comportamiento de la integral de línea frente a un cambio de parámetro.
Sea C una curva lisa a trozos.
Si (3 es una parametrización de C con dominio [a, b], Q es otra parametrización de C con dominio [c, d]. Como ya lo mencionamos anteriormente la orientación de la parametrización es muy importante y en esta propiedad, explicaremos a continuación, la orientación de la parametrización toma su verdadera importancia. Entonces, si las dos parametrizaciones de C, B y Q recorren la curva en el mismo sentido, se tiene que
| F* dlí = J F* dQ
Si las dos parametrizaciones de C, fí y O recorren la curva en el mismo sentido, se tiene que
í F* dß = F* dO Je i 'c
pero si las dos parametrizaciones fí y O recorren la curva C en sentidos opuestos, tenemos que
í F • dß = - ¡ F • dO Je J C
40
pero si las dos parametrizaciones B y Q recorren la curva C en sentidos opuestos, tenemos que
l F • d& = - I F • dO
Las demostraciones de estas propiedades de la integral de línea de un campo vectorial se reducen a la utilización de la misma propiedad para la integral definida ordinaria, razón por la cual, y por su simplicidad no las desarrollaremos.

LA INTEGRAL DE LINEA - DE UN CAMPO ESCAIAR - DEFINICION
2.4 INTEGRAL DE LINEA DE UN CAMPO ESCALAR
En nuestra presentación intuitiva de la idea de integral de línea de un campo escalar f definido sobre una curva C del plano (ver capítulo 1, figura 1.2) afirmamos que podemos calcular el área de la región sombreada en la figura 1.2 utilizando la integral de línea de f sobre C.
Ampliaremos esta idea mostrando como calcular esa área. La figura 2,3 reproduce a la figura 1.2 con más detalles necesarios para com-prender mejor el proceso.
La curva C la tomaremos lisa o lisa a trozos y el campo escalar f lo tomaremos continuo sobre C, además tal que f(X) s 0 para todo X en C. Como ya lo dijimos la función longitud de arco es una función del intervalo [a, b] en R definida por: (para nuestro caso )
S ( t ) = | II &'(u) II du
y que representa la longitud del pedazo de curva C desde &(a) a &(t). Con las condiciones dadas podemos encontrar utilizando el Primer Teorema Fundamental del cálculo a S'(t) la cual es:
S'(t) = l l& ' ( t ) II
a t b
FIGURA 2.3 La curva Z=f(&(t)) es la gráfica de un campo
escalar 1 definido sobre la curva C con parametrización & definida sobre el intervalo [a,b].
41

o
dS. = | |&'(t) || d t
f(&(t)) y por lo tanto
dS = II &'(t) II dt o s
S L Es claro que S(a) = 0 y si llamamos L a la longitud de la curva C,
entonces S(b) = L.
Supongamos que la pared en consideración se puede, por su material (papel o cartulina), «extender» o adherir completamente sobre un plano para calcular su área como región de un plano. Al hacer esto obtendríamos lo que muestra la figura 2.4, donde el eje vertical será el mismo eje z del espacio y el eje horizontal lo llamaremos S porque en este eje se está midiendo la curva C.
Pero al hacer el dibujo, ¿cómo se dibuja la curva que limita la «pared» en la parte superior ?. De la siguiente forma: para cada valor de t entre a y b existe un punto &(t) de la curva C entre &(a) y &(b) y existe un valor S entre 0 y L que es la longitud de C desde &(a) a &(t), dado por la expresión
FIGURA 2.4 «Pared» mostrada en la figura 2.3, extendida sobre
un plano psra calcular su área. La región sombreada en la figura 2.3 es una sección de cilindro o
«pared».
42
en f o r m a breve S = 0 (t)
Esta función 0 (función longitud de arco) es inyectiva, es decir, es inversible, entonces
t = 0 " 1 (S ) ,
y si definimos la función F por
F ( s ) = f ( & ( t ) ) = f ( & ( 0 _ 1 ( s ) ) ) p a r a s en [0 , L]
el punto a dibujar de la curva, correspondiente al valor S debe ser el de coordenadas (S,F(S)).
Con esto la región dibujada en la figura 2.4 es el resultado de «extender» la «pared» de la figura 2.3 sobre un plano: el plano-zS.
Podría decirse que con este proceso la «pared» sombreada en la figura 2.3, que no necesariamente es plana, la hemos vuelto plana y su área corresponde al área de la región plana sombreada de la figura 2.4
El área A de la región sombreada en la figura 2.4, según lo aprendi-mos de nuestro curso de cálculo integral en una variable, es:
A = í F(s) d s , JO
y a q u e F ( s ) > 0 , puesto que f ( & ( t ) ) > 0 .
LA INTEGRAL DE LINEA - DE UN CAMPO ESCAIAR - DEFINICION
El área A de la región sombreada en la figura 2.4, según lo aprendimos de nuestro curso de cálculo integral en una variable, es:
A = í F(s) d s , JO
ya que F(s) >0, puesto que f (&(t» >0.
43

Pero, S vale 0 cuando t = a y S vale L cuando t = b, entonces, en términos de la variable t,
A = | b f ( & ( t ) ) l l & ' ( t ) II dt
puesto que ds = II&' (t)ll dt
De esta forma el área de la «pared» mostrada en la figura 2.3 es también
íb A = J f (&(t ) ) II &'(t) II dt
La integral de la derecha que acabamos de escribir se llama integral de línea del campo escalar f sobre C
LA INTEGRAL DE LINEA - DE UN CAMPO ESCAIAR - DEFINICION
2.5 DEFINICION DE INTEGRAL DE LINEA DE UN CAMPO ESCALAR
De la misma forma que el concepto de integral de línea de un campo vectorial lo motivamos con el cálculo del trabajo realizado por una fuerza al desplazar una partícula recorriendo una curva, el concepto de integral de línea de un campo escalar lo hemos motivado con el cálculo del área de una «pared». La integral que así se obtiene se llama una integral de línea de un campo escalar.
Más generalmente, si f es un campo escalar definido y acotado sobre una curva C con parametrización 13, la integral de línea sobre C, notada con el símbolo
i f d s
esta definida por la ecuación
f f d s = j f ( 6(t)) II B'(t) II dt
donde [a, b] es el dominio de 3, y cuando la integral de la derecha existe.
Si f es un campo escalar definido y acotado sobre una curva C con parametrización B, la integral de línea sobre C, notada con el símbolo
Lfds esta definida por la ecuación
| fds = | f( fc(t)) II &'(t) II dt
donde [a, b] es el dominio de B, y cuando la integral de la derecha existe.
45

CALCULO INTEGRAL EN VARIAS VARIABLES REALES
FIGURA 2.5 Sección del cilindro X?+Y* = i"
comprendida entre los planos Z=0 y Z=5X/2, con X>0.
De acuerdo a la motivación, el ejemplo más natural será el de calcular el área de una «pared».
Calcularemos el área de la sección del cilindro X2 + Y2 = r2 con r>0, comprendida entre los planos Z = 0 y Z = (5/2) X y al lado en el cual XaO.
En la figura 2.5 se muestra la pared del cilindro que deseamos calcular.
Veamos como es la altura de la «pared» en un punto cualquiera (X,Y) de su base. Como la «pared» está delimitada superiormente por el plano Z = (5/2) X entonces, eso quiere decir que la altura Z de la «pared» en el punto (X, Y), es también (5/2) X, obteniéndose así la definición del campo escalar f que determina la altura de la «pared» en el punto (X, Y) de la base. Con ese campo escalar f, definido por
f(X, Y) = (5/2) X
y la integral de línea, podemos calcular el área A de la «pared».
Pero antes de formular la integral de línea que debemos calcular, ha de encontrarse una parametrización de la curva o «borde» inferior de la «pared ».
Como (X, Y) recorre la semicircunferencia de
X 2 + Y 2 = r 2 , donde X > 0,
entonces expresemos X y Y en coordenadas polares:
X = reost Y = r sen t, con -u/2 s t < u/2.
46

LA INTEGRAL DE LINEA - DE UN CAMPO ESCAIAR - DEFINICION
La parametrización del «borde» inferior de la «pared» es entonces:
B(t) = ( r eos t, r sen t ) , con -TI/2 s t < TI/2.
y B'(t) = ( - r sen t, r eos t ) , con -n/2 s t < n/2.
El área A de la «pared» es:
- í
r n/2 A = | f (S( t ) ) II fc'(t) II d t
n/2
/n/2 (5 /2) r 2 cos t dt
J- n/2
/•n/2 = ( 5 / 2 ) r 2 1 eos t dt
J-n/2
= 5 r 2
En la sección 2.3 tratamos tres propiedades fundamentales de la integral de línea para campos vectoriales, de las cuales las dos primeras (linealidad y aditividad con respecto al intervalo de integración) también las satisface la integral de línea para campos escalares. Pero la tercera (comportamiento frente al cambio de parámetro) tiene un significado diferente en campos escalares.
La integral de línea de un campo escalar no se altera si Utilizamos una La integral de línea de un campo escalar no se altera
parametrización que cambie la orientación de la curva. Si utilizamos una parametrización que cambie la orienta-ción de la curva
47

Veámoslo en el ejemplo que acabamos de desarrollar (área de una sección de cilindro). Habíamos utilizado la parametrización
Í3(t) = (r eos t, r sen t), con -n/2 <; t «s n/2,
la cual recorre la curva en sentido antihorario. Ahora utilicemos la parametrización
O(t) = (r sen t, r eos t ) c o n O < t < n
que recorre la curva en sentido horario.
O'(t) = (r eos t, - r sen t ) c o n O < t < n I IO'( t ) l l = r y f ( 0 ( t ) ) = (5 /2 ) r sen t ,
entonces
IT
= — f r2 sen t dt 2 Jo
r2 sen t dt
- — r2 f sen t dt 2 Jo

LA INTEGRAL DE LINEA - DE UN CAMPO ESCAIAR - DEFINICION
Una explicación de esta situación puede verse, analizando que el área de la «pared» es la misma sin importar por cual extremo empecemos a medirla.
En forma más general se puede afirmar que si C es una zurva lisa a trozos, f es una función continua sobre C, fí y O son parametrizaciones de C, con dominio [a, b] y [c, d] respectivamente, entonces
I f 6 d s = | f f ids
o sea
í f (B ( t ) ) I IB ' ( t ) II d t f ( 0 ( t ) ) H 0 ' ( t ) II dt
El concepto de integral de línea para campos escalares tiene una importante relación con el concepto de integral de línea para campos vectoriales. La mostraremos a continuación.
Sea F un campo vectorial definido sobre una curva C, con parame-trización 6 definida sobre [a, b], entonces
M , ' F(B(t))-B'(t)dt
Se puede afirmar que si C es una curva lisa a trozos, f es una función conti-nua sobre C, B y O son parametrizaciones de C, con dominio [a, b] y le, d] respectiva-mente, entonces
j k a s = | c fnds
49
CALCULO INTEGRAL EN VARIAS VARIABLES REALES
pero ß'(t) es un vector tangente a la curva en el punto ß(t) y II ß'(t) II es su norma de tal forma que
*'<*> = T(ß) II ß ' ( t ) II
es un vector unitario tangente a la curva en el punto ß(t), y entonces
í F(ß( t ) ) • ß ' ( t ) d t = í F(ß( t ) ) • ß ' ( t ) II ß ' ( t ) II d t Ja Ja II ß'(t) II
= j F(ß( t ) ) • T(ß) II ß ' ( t ) II d t
i F(ß(t))*T(ß)ds= I f(ß(t))ds • Í
para el campo escalar f ( ß ( t ) ) = F(ß( t ) ) • T(ß)
Así que

LA INTEGRAL DE LINEA - TEOREMAS FUNDAMENTALES
2.6 SEGUNDO Y PRIMERO TEOREMAS FUNDAMENTALES DEL CALCULO PARA INTEGRALES DE LÍNEA.
De nuestro curso de cálculo integral de funciones de una variable recordemos el siguiente teorema (llamado comúnmente Segundo Teorema Fundamental del Cálculo Integral):
Sean fyG dos funciones reales continuas en el intervalo cerrado [a,b] y tales que
G' = f entonces
f. f (x) dx = G(b) - G(a)
Con la generalización que hicimos del concepto de Integral Definida, al concepto de Integral de Línea de un campo vectorial, podemos ahora conocer un teorema, cuyo enunciado es muy parecido al Segundo Teorema Fundamental del Cálculo que acabamos de recordar. Por eso mismo le daremos el nombre de Segundo Teorema Fundamental del Cálculo para Integrales de Línea.
Segundo Teorema Fundamental del Cálculo Integral Sean fyG dos funciones.reales continuas en el
intervalo cerrado [a,b] y tales que
G' = f entonces
f. f (x) dx = G(b) - G(a)
51

FIGURA 2.6 Conjuntos abiertos conexos del plano
El parecido está fundamentado en algunas analogías que ya cono-cimos en nuestro curso de Cálculo Diferencial en Varias Variantes y que son:
Una Variable Varias Variables
f '(x) (Derivada de f) f (P r im i t i va )
grad(f(X)) (Gradiente de f ) f (Fune ión potenc ¡al de grad(f))
Sin embargo, debemos antes de enunciar ese teorema ocuparnos de un concepto, que por estar implícito en la formulación del teorema para una sola variable, posiblemente lo desconozcamos, pero que es parte importante de las hipótesis del mismo teorema para Integrales de Línea. Se trata del concepto de Conjunto Conexo.
Una Variable Varias Variables
f (x) ( D e r i v a d a de f)
f ( P ri m i ti v a) grad(f(X)) (Grad iente de f )
f (Función potencial de grad(f))
Un subconjunto S de Rn se dice conexo si cualquier par puntos A y B de S se pueden juntar o comunicar por una curva C lisa a trozos totalmente contenida en S.
Un subconjunto S de R se dice conexo si cualquier par puntos A y B de S se pueden juntar o comunicar por una curva C lisa a trozos totalmente contenida en S.
En otras palabras si AyB son puntos de S, existe una curva C lisa a trozos con parametrización O definida en [a, b] tal que O(t) está en S para todo t en [a, b] y O(a) = A y O(b) = B.
Otro concepto importante en la formulación del teorema que nos ocupa es el de Conjunto Abierto del plano o del espacio.
52