low-cost rescue robot for disaster management in a ... · 17 low-cost rescue robot for disaster...
TRANSCRIPT

17
Low- Cost Rescue Robot for Disaster ManagementIn a Developing Country - Development of a Prototype
Using Locally Available Technology
Mahmud, Faisal. ; Hossain, S.G.M.1; Alam, Jobair Bin.2
Civil and Environmental Engineering Department, Old Dominion University, Norfolk, Virginia, USA
Department of Mechanical Engineering1, University of Nebraska at Lincoln, Nebraska, USA
Professoi, Department of Civil Engineering, Bangladesh University of Engineering & Technology (BUET),Dhaka, Bangladesh
E-Mail: [email protected]. [email protected]/.edu1
Abstract. The use of robots in different fields is common and effective in developed countries. In case ofincident management or emergency rescue after a disaster, robots are often used to lessen the human effortwhere it is either impossible or life-threatening for rescuers. Though developed countries can afford roboticeffort for pro-disaster management, the scenario is totally opposite for developing and under-developedcountries to engage such a machine-help due to high cost of the machines and high maintenance cost aswell. In this research paper, the authors proposed a low-cost "Rescue-Robot" for pro-disaster managementwhich can overcome the budget-constraints as well as fully capable of rescue purposes for incidentmanagement. Here, all the research works were performed in Bangladesh - a developing country in SouthAsia. A disaster struck structure was chosen and a thorough survey was performed to understand the reallife environment for the prototype. The prototype was developed considering the results of this survey and itwas manufactured using all locally available components and facilities.
Keywords: Rescue-robot, pro-disaster management, cost-effectiveness.
INTRODUCTION
Disaster causes can be classified into two maingroups-natural and man-made. In the past, prodisaster rescue work was performed by humanwhere machine assistance was not effectivelyutilized as it was not improved enough. As the timepassed, the unprecedented number and scales of
natural and human-induced disasters has urged theemergency search and rescue community aroundthe world to seek for newer, more effectiveequipment to enhance their efficiency. Rely onsearch dogs, camera mounted probes and humanhelp is still considered as the assisting tools andtechnology for rescue as well as search purposes.But, with the advancement of science andtechnology, intelligent robots (i-robots) equippedwith advanced sensors and detectors are attractingmore and more attentions from researchers andrescuers. The developed countries though achievedthe technology and went on production for rescue
robots, in case of developing or underdevelopedcountries, this advanced and intelligent assistingtool remains a dream to-date. The reason is mainlyfor the budget constraints- without the money, noresearch work is possible, and without the researchwork, no innovation is capable-ultimately the aim forrescue robot as a mass production becomes alatent hope. In this paper, the researchers tried toillustrate how to develop the technology of a rescuerobot within a limited budget or low-cost in adeveloping country as well as effectiveness ofreusable materials in making this rescue robot.
Background of the Research
Natural and human-induced disasters always costin terms of money or lives. Natural disasters inrecent years, such as the Hurricane Katrina andRita in 2005, China earthquake in the capital ofSichuan in 2008, Cyclone Nargis in Burma andBangladesh in 2008 and so others throughout the
https://ntrs.nasa.gov/search.jsp?R=20100012838 2019-04-08T15:49:33+00:00Z
18
world claimed deadly and costly tolls to the affectedcommunities [1]. Human-induced disasters in theform of civil-war, terrorist attacks etc. also havedirect casualties not fewer than the naturaldisasters. Collapsed buildings are common fieldenvironment for humanitarian search and rescueoperations. Earthquakes, typhoons, tornados,weaponry destructions, and catastrophic explosionscan all generate damaged buildings in large scales.The use of heavy machinery in such incidents isprohibited because they would destabilize thestructure, risking the lives of rescuers and victimsburied in the rubble [2].
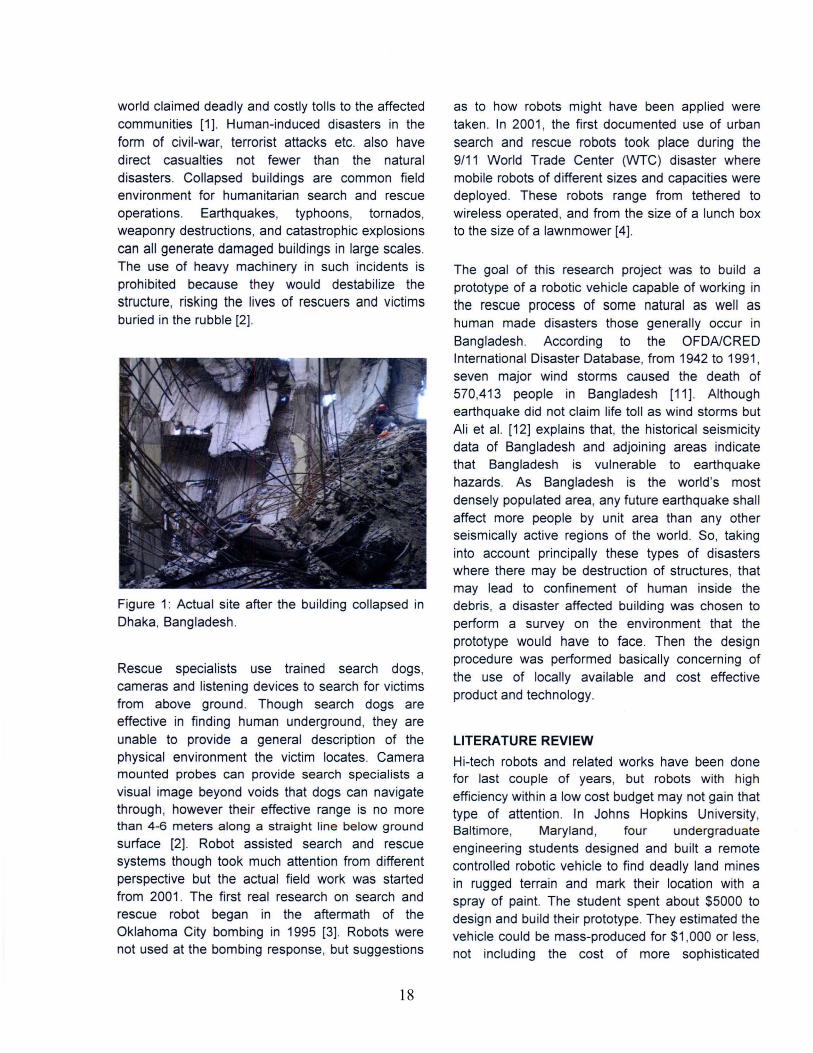
Figure 1: Actual site after the building collapsed inDhaka, Bangladesh.
Rescue specialists use trained search dogs,cameras and listening devices to search for victimsfrom above ground. Though search dogs areeffective in finding human underground, they areunable to provide a general description of thephysical environment the victim locates. Cameramounted probes can provide search specialists avisual image beyond voids that dogs can navigatethrough, however their effective range is no morethan 4-6 meters along a straight line below groundsurface [2]. Robot assisted search and rescuesystems though took much attention from differentperspective but the actual field work was startedfrom 2001. The first real research on search andrescue robot began in the aftermath of theOklahoma City bombing in 1995 [3]. Robots werenot used at the bombing response, but suggestions
as to how robots might have been applied weretaken. In 2001, the first documented use of urbansearch and rescue robots took place during the9/11 World Trade Center (WTC) disaster wheremobile robots of different sizes and capacities weredeployed. These robots range from tethered towireless operated, and from the size of a lunch boxto the size of a lawnmower [4].
The goal of this research project was to build aprototype of a robotic vehicle capable of working inthe rescue process of some natural as well ashuman made disasters those generally occur inBangladesh. According to the OFDAICREDInternational Disaster Database, from 1942 to 1991,seven major wind storms caused the death of570,413 people in Bangladesh [11]. Althoughearthquake did not claim life toll as wind storms butAli et al. [12] explains that, the historical seismicitydata of Bangladesh and adjoining areas indicatethat Bangladesh is vulnerable to earthquakehazards. As Bangladesh is the world's mostdensely populated area, any future earthquake shallaffect more people by unit area than any otherseismically active regions of the world. So, takinginto account principally these types of disasterswhere there may be destruction of structures, thatmay lead to confinement of human inside thedebris, a disaster affected building was chosen toperform a survey on the environment that theprototype would have to face. Then the designprocedure was performed basically concerning ofthe use of locally available and cost effectiveproduct and technology.
LITERATURE REVIEW
Hi-tech robots and related works have been donefor last couple of years, but robots with highefficiency within a low cost budget may not gain thattype of attention. In Johns Hopkins University,Baltimore, Maryland, four undergraduateengineering students designed and built a remotecontrolled robotic vehicle to find deadly land minesin rugged terrain and mark their location with aspray of paint. The student spent about $5000 todesign and build their prototype. They estimated thevehicle could be mass-produced for $1,000 or less,not including the cost of more sophisticated

19
detection sensors (6). Educational robot like TheTrikebot was claimed as a ground-up design effortchartered to develop an effective and low-costeducational robot for secondary level education andhome use with its chassis to be producedeconomically (approximately $500 per chassis) byits inventors (7). In India a team of students from theSree Chithra College of Engineering,Pappanamcode, developed a low-cost workingmodel of robot called "RASOR" capable offunctioning in domestic and industrial environments.Though the team would not like to reveal the exactproduction cost of RASOR, "for marketing reasons",they said that making a RASOR would take lessthan Rs. 30,000 (approximately $615 USD) (8).Albert Ko and Henry Y. K. Lau had worked for thelow-cost autonomous robotic search and rescuesystem to design and cooperate in large quantity tosearch for survivors in rubbles. These robots wereequipped with wireless communication module tofacilitate data and video/audio transfer. Thesewireless robots, with no tethers, could navigatefreely in obstructed environment but were difficult totrack their locations once they wandered out of theoperators' sights (2). A team from the University ofNew South Wales, Sydney, Australia had builtseveral "Redback" robots, each for a cost ofapproximately $4,500 USD inclUding the cost of theonboard PC, batteries, communications andsensors (9). Utilizing off-the-shelf low cost parts,Mundhenk et al. had constructed a robot that wassmall, light, powerful and relatively inexpensive «$3900) [10]. From all these previous works, it isfound that robots making with hi-technology andperformance as well as low-cost budget sometimescause hindrance to reach the goal. Our effort in thisrespect was to overcome all the previous failures asmuch as possible and to utilize reusable materialsso as to negotiate with the budget limits.
METHODOLOGY
Field Work and Site Survey
On December 8, 2007, a 22 story high rise building(called RANGS Bhaban) in Dhaka, the capital ofBangladesh, collapsed while it was going on fordemolition to make a link road. The casualtiesnumbered more than 22. Dhaka, the capital ofBangladesh, is now one of the congested and
mostly populated cities in the world with thepopulation density 14,608/km(5). With thepopulation increase and urbanization, buildings arebuilt for reasons, but in most cases withoutfollowing proper guidelines and building codes. As aresult, if a medium intensity of earthquake oncestrike Dhaka, the scenario will be disastrous.Keeping this fact in mind, a research work wascarried out for the first time to make a machine help(hereinafter called rescue robot) for pro-disastermanagement and rescue purposes. The collapsedbuilding site was investigated for getting the real lifescenario after the disaster and also for the designpurpose of the rescue robot to overcome all type ofhindrance for rescue work.
Figure 2: Comparison of the gravel size on site witha pen.
The concrete structure building's 14th floorcollapsed due to improper demolition methodswhich caused the collapse of all the floors up to 4th
floor and took lives of several workers. Thecondition of the building was considered as quasisimilar to a natural disaster struck building. A placewas chosen on the 6th floor that had the possibilityof having someone trapped in. The survey resultsshowed that for a beeline course for the robot, onan area having the length of 3 meters and width of1 meter, the average length of concrete blocks (thelength being in the same direction of the robot'spath) came to be as 198 mm. In this measurement,concrete blocks having length of 50 mm to 300 mmwere considered as potential obstacles for therobot. Blocks with length less than 50 mm were

20
considered as too easy to overcome while thosemore than 300 mm were considered as too largethat the robot could accommodate on it.
Similarly, the average height of the obstacles cameas 106 mm and the average slope of the obstaclewas measured as 60 degrees, that is, the robotwould have to be capable of moving on the 60degree slope to overcome that certain block.
These data were necessary to identify the size ofthe robot's wheels and also the overall dimensionsof the total robot. This also helped to find therequired torque for the drive motors.
Search for Local Components
After the completion of the robot's mechanicalcomponent design, a thorough investigation wasperformed on the availability of those componentsin the local market. The researchers had to rely onthe reusable components wherever possible toimply. For example, aluminum chips collected fromthe lathe machine refusals were used to preparethe wheels of the robot. But because of thepresence of too much slug, they did not appear tobe a good choice for casting.
Figure 3: Aluminum chips for robot wheel.
Then aluminum alloy automobile engine cylinderswere melted and casted which showed very goodperformance for the casting. These cylinders werecollected from the junkyards. Custom tires wereprepared from heavy duty timing belts. This wouldhelp the robot to move about in a very rough terrain.
Figure 4: Robot wheel before finishing.
DESIGN
Design for Work Environment
The work environment for a rescue robot differsfrom the conventional robots principally because ofthe rough terrain caused by the debris. This issimilar to the international rescue robotscompetitions which require robots to negotiatecomplex and collapsed structures, find simulatedvictims, and generate human readable maps of theenvironment [13]. The wheel size was optimizedconsidering the torque supplied by the motors andthe average height of the obstacles obtained fromthe field survey. Four shock absorbers were madeusing metal spiral springs and steel plates. Thesewere provided to minimize the shock created on therobot's body as well as the effect of a dislocatedcenter of gravity that might have caused the risk offalling down of the robot while moving through aninclined surface or passing a large obstacle.Triangular brackets were provided in the chassis ofthe robot to induce extra strength to the structure.But aluminum was used wherever possible to keepthe total weight of the robot down which is importantfor economic power consumption.
High torque worm-wheel motors (from surplusstore) were used as drive and these were coupledto rear wheels. Each of the rear wheels wascoupled to the front wheel by a chain-sprocketsystem to enhance the torque and work as a fourwheel drive vehicle. This would help in its vigorous

21
Figure 7: Rescuemate PDA (official name of therescue robot).
Standardized parts were designed and usedwherever possible. For example, standard sizedscrews were used in most of the parts of theassembly. The brackets and the aluminum channelstocks were interchangeable parts.
The whole chassis of the robot was composed offour symmetric and interchangeable subassemblies. Most of the screws were inserted as atop down manner. But in some cases the DFM andDFA were not possible to follow such as, partscount was tried best to minimize but to sacrifice forinterchangeable and symmetric subassemblies, itincreased to some extent. Secondary operations onthe wheels were performed by machining the roughcasted surface which also goes against DFM butthis was important to reduce the material cost. If thewheels were manufactured from a large shaft then itwould not only induce high cost for the material butalso a large amount of aluminum would be wasted.
e-r1ngs
Sprocket
Front Wheel 1
Front Wheel 2
Chain 2
Chain 1
R8.rWheel2
Figure 5: Spring plate to resist bumping.
The tires of the wheels were made from heavy dutytiming belts which had very good grip to move onan inclined surface. These had an additionalproperty of heat resistance up to such a level whichmay help this robot perform rescue works in a hot,fire affected zone.
movement through the rough terrain and also toovercome obstacles.
Figure 6: Schematic of the Robot's drive system. COST ANALYSIS
Design for Manufacturability and Assembly
Some of the Design for Manufacturability (DFM)and Design for Assembly (DFA) methods werefollowed even though this was a prototype. Thiswould help in the manufacturing and assembly ofseveral robots if the prototype would worksuccessfully. These techniques would in turns helpreduce the labor and capital cost and also to keepthe cost of the robot down.
The cost can be divided into three broad categoriesas the cost for mechanical components, cost ofmanufacturing and the cost of the electronics andprogramming components.
Mechanical Components
These components shared a cost of around $550.The motors were collected from surplus storeswhich were still in very good working condition.These were power window motors of automobiles.

22
The chassis was made of mainly aluminum andthese components were collected from thehardware stores which incurred a higher price. Butthe wheels were custom made from rejectedaluminum alloy components from a junkyard. Thechain sprockets were scrapped ship components.
Cost of Manufacturing
Most of the manufacturing works were performed inthe university facility which included lathe andshaper machine operations, foundry and weldingoperations etc. and these were not counted to thecost of manufacturing. But for some specialoperations such as delicate welding or machining,local machine shops and the expert help wassought which took about only $100. This waspossible as labor cost is very low in Bangladeshcompared to any first world country.
Electronic Components
These components had two extremes. Somecomponents were prepared in the lab as the simplecircuit boards and Wirings. But for somecomponents the estimated cost was sacrificed forthe high-tech components such as camera for therobot vision, high intensity search lights,microcontroller circuit boards, and radio frequencygenerating and receiving circuits giving cleansignals. Although the robot's test run wasperformed by using very simple motor controlcircuit, these components were essential for the fullfledged working for the rescue robot and so thesecosts were included in the estimation. Thesecomponents shared a price of about $800.
Analyzing the costs, it can be concluded that themanufacturing cost and the cost for mechanicalcomponents were successfully kept low withoutaffecting the quality much. The total cost includingsophisticated sensor parts and some other costswere no more than $2,000.
RESULTS
From this research work, it is found that roboticassistance is quite important in Bangladesh for prodisaster situation. In this three phase research
work, the authors demonstrated the first phasewhereas the second and third phases were stillgoing on. The first phase was that a robot will beable to overcome all the difficulties to run in adisaster strike site where rubbles and otherobstacles were by produced. In the second phase,it will be able to identify any live person/ livinganimal by its audio-visual system. The last andultimate part is to attach a robotic arm with thevehicle so that it can assist the trapped person torescue. The robotic arm has already prepared in theBUET mechanical engineering lab, but the on-sitetest is still to run. With a very low budget, theresearchers/ authors were not only able to meet theresearch objectives but also made it possible howto use the scrap goods/materials to make a newrobot. From this perspective, we can call this robotan "Environmental Friendly" rescue robot. Duringthe initial test run of the robot, it showed goodperformance to overcome moderate sized discreteobstacles (maximum height being 55mm and on aplane surface having a slope up to 40\ But theseperformances need to be improved to achieve thegoals set by the initial survey.
Limitations
There were some limitations like all other researchworks which the authors accept as of short fundingand allocation of proper money in this project. Theresearch work was carried out for only six monthsby the authors as they had to come to the USA forhigher studies. But, before coming, they were ableto complete the first phase which already havedescribed. The micro-controller system was notcompleted for the first run of this robot. The roboticrescue arm was made by this time. The authorsexpect to contribute this kind of research work inthe developing countries where the governmentsface budget constraints to do research work formaking robotic rescue effort.
CONCLUSION AND FUTURE WORKS
Within a limited low-cost budget and reusablematerials using, the Rescuemate PDA showed itseffectiveness to match the research goals. For fieldtest purpose, wire-connected experiments were

23
done, but micro-processor control system was theresearch goal which is still under research options.Currently some works are going on for making itmore affordable to the local agencies in Bangladeshin case of emergency rescue works. This was thefirst effort in Bangladesh to make a rescue robotfrom reusable materials and scrap goods. It is truethat sometimes mass production can makeanything available with low-cost, but theresearchers at least tried to meet the need ofrescue works by robotic effort within a lOW-budget inBangladesh. In case of mass production, this typeof robot can be built within $1000. In future, thiscurrent rescue version of robot in Bangladesh willget more rescue capability and precisenessbecause of the "Central Robotic Research (CRR)",the authors would like to contribute to this goal.
ACKNOWLEDGEMENT
The authors would like to thank Dr. Jobair Bin Alam,Professor, Department of Civil Engineering,Bangladesh University of Engineering andTechnology (BUET), Bangladesh for his generoussupport and inspiration as well as giving theopportunity for this research work. Both the authorswere research assistants of Dr. Jobair Bin Alam atthe time of this research. This research work wassolely carried out for BUET and BangladeshGovernment. All the photographs included in thispaper were taken by the researchers from real siteinvestigation.
REFERENCES
[1] http://www.guardian.co.uklworld/naturaldisasters.
[2] Albert Ko and Henry Y. K. Lau. Robot AssistedEmergency Search and Rescue System,International Journal of Advanced Science andTechnology Vol. 3, February, 2009.
[3] Murphy, R. R. (2004). " National ScienceFoundation Summer Field Institute for rescuerobots for research and response (R4)". AIMagazine. Vol. 25, issue 2: pp.133-136.
[4] Snyder, R. (2001). "Robots assist in search andrescue efforts at WTC," IEEE Robot. AutomationMagazine, vol. 8, pp. 26-28.
[5]http://archive.wn.com/2009/07/1 0/1400/dhaka/index6.html
[6] http://www.scienceblog.com/cms/node/2947.Retrieved on 06/07/2009.
[7] Hsiu, T and et al. (2002). "Designing a Lowcost, Expressive Educational Robot," The RoboticsInstitute, Carnegie Mellon University, Pittsburgh,PA.
[8]http://www.hinduonnet.com/2004/07/04/stories/2004070408280300.htm. The Hindu, online edition ofIndia's National Newspaper, published on July 4th,2004.
[9] Raymond Sheh. "The Redback: A Low-CostAdvanced Mobility Robot for Education andResearch".
[10] Mundhenk et al. "Low cost, high performancerobot design utilizing off-the-shelf parts and theBeowulf concept, The Beobot project."
[11] EM-DAT: The OFDNCRED InternationalDisaster Database, Universite Catholique deLouvain, Brussels, Belgium (05/01/2003).
[12] Earthquake Database and Seismic Zoning ofBangladesh, Md. Hossain Ali, BangladeshUniversity of Engineering and Technology, INCEDEReport, February 1998, Bangkok.
[13] Test Arenas and Performance Metrics forUrban Search and Rescue Robots Adam Jacoff,Elena Messina, Brian A. Weiss, Satoshi Tadokoro,and Yuki Nakagawa; Proceedings of the 2003IEEE/RSJ International Conference on IntelligentRobots and Systems, Las Vegas, NV, October 2731,2003.