loris bazzani*, marco cristani*†, vittorio murino*† speaker: diego tosato* *computer science...
TRANSCRIPT

Loris Bazzani*, Marco Cristani*†, Vittorio Murino*†
Speaker: Diego Tosato*
*Computer Science Department, University of Verona, Italy
†Istituto Italiano di Tecnologia (IIT), Genova, Italy
Collaborative Particle Filters for Group Tracking
This research is founded by the EU-Project FP7 SAMURAI,grant FP7-SEC- 2007-01 No. 217899
Analysis of the problem (1)
2
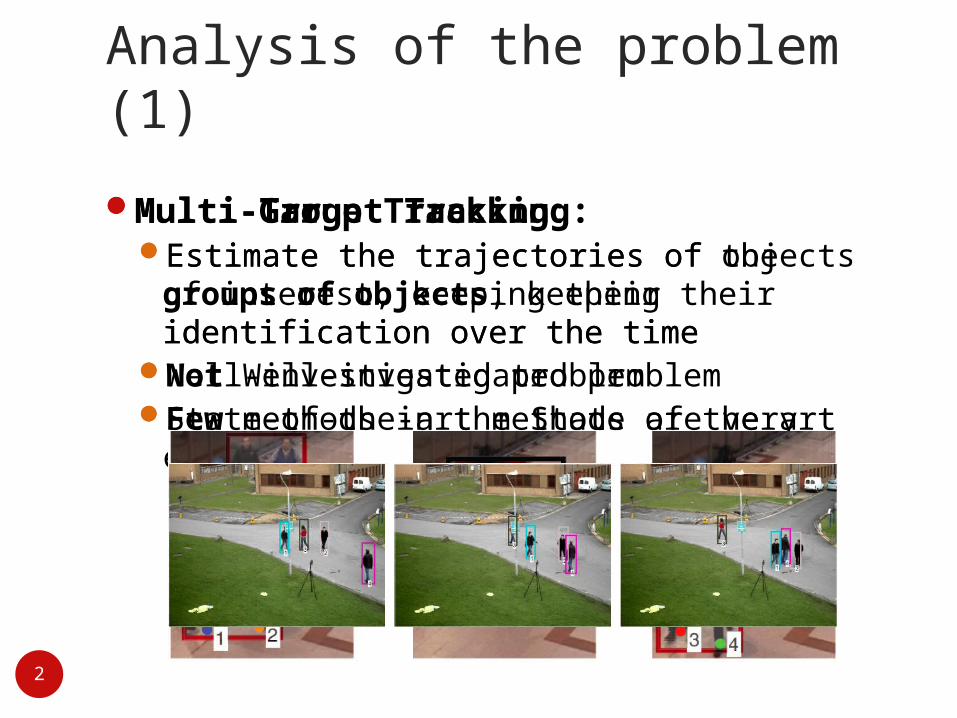
Multi-Target Tracking: Estimate the trajectories of objects of
interest, keeping their identification over the time
Well-investigated problemState-of-the-art methods are very effective
and efficient
Multi-Group Tracking:Estimate the trajectories of the groups of
objects, keeping their identification over the time
Not Well-investigated problemFew methods in the State of the art
Analysis of the problem (2)
Why it is a hard taskMethods for multi-target tracking failsGroups are highly structured entityHard to model the complex dynamicsStrong appearance variations over the timeIntra- and inter-group occlusions phenomenaWhat is a group?
Motivation:Highlighting social behaviors among
individuals3
Outline
4
Overview of the proposed methodParticle Filtering Multi-Object Tracking (MOT)Multi-Group Tracking (MGT)Collaborative Particle Filters (Co-
PF)ResultsConclusions
Overview of the proposed method
5
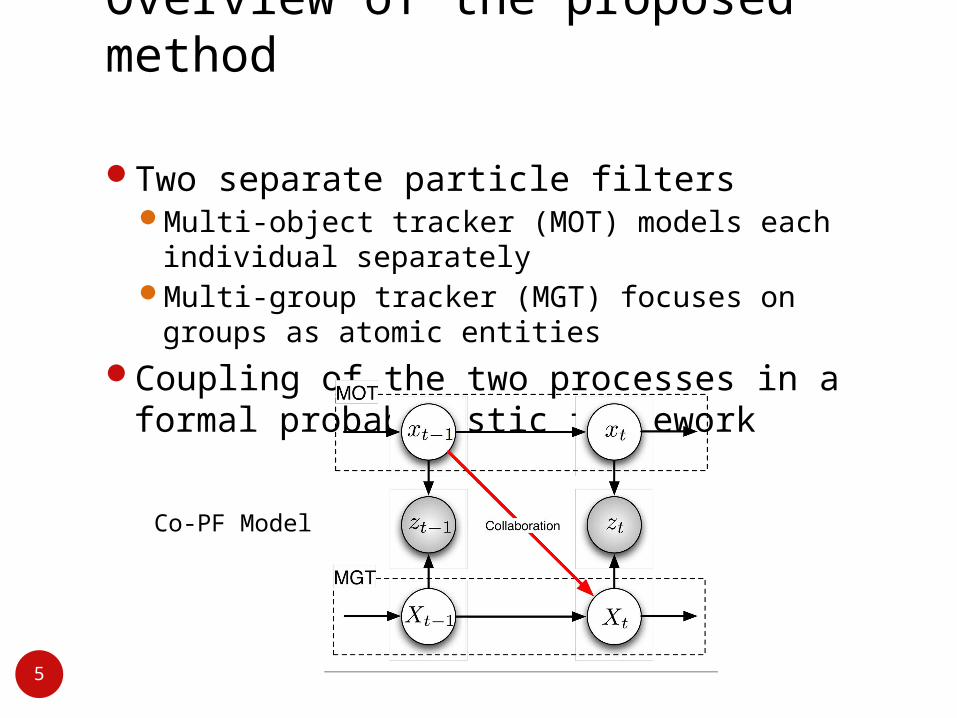
Two separate particle filtersMulti-object tracker (MOT) models each individual
separatelyMulti-group tracker (MGT) focuses on groups as
atomic entitiesCoupling of the two processes in a formal
probabilistic framework
Co-PF Model
Particle Filtering for Target Tracking
Recursively calculating the posterior distribution
is defined by
The dynamical modelThe observation modelThe first frame distribution Monte Carlo approximation by a set of
weighted particles6
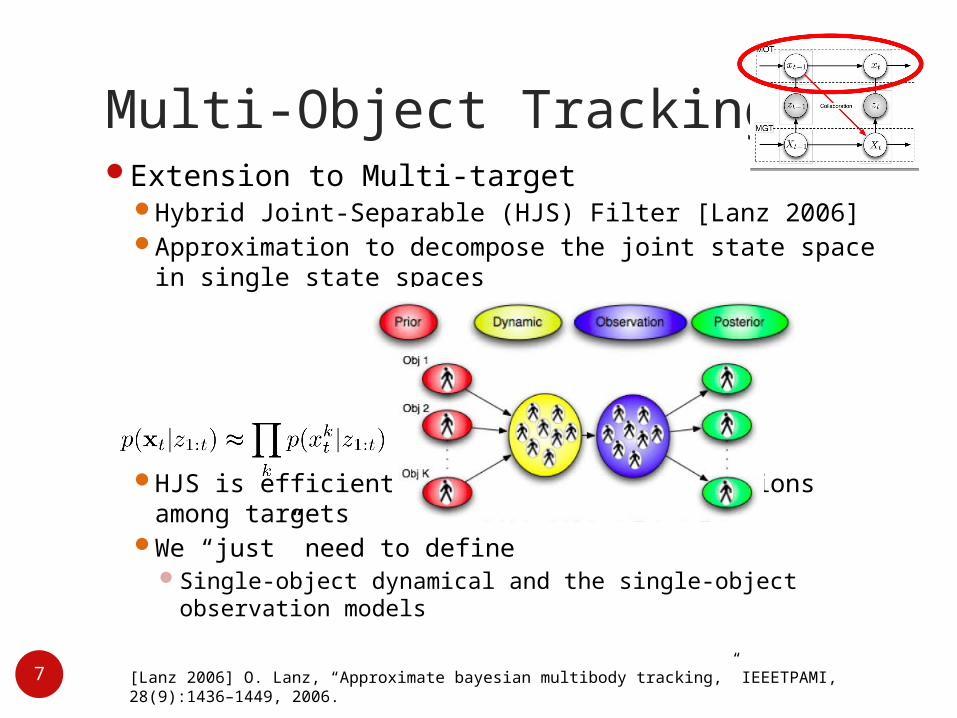
Multi-Object TrackingExtension to Multi-target
Hybrid Joint-Separable (HJS) Filter [Lanz 2006]Approximation to decompose the joint state space in
single state spaces
HJS is efficient and models the interactions among targets
We “just” need to defineSingle-object dynamical and the single-object observation
models
7 [Lanz 2006] O. Lanz, “Approximate bayesian multibody tracking,” IEEETPAMI, 28(9):1436–1449, 2006.
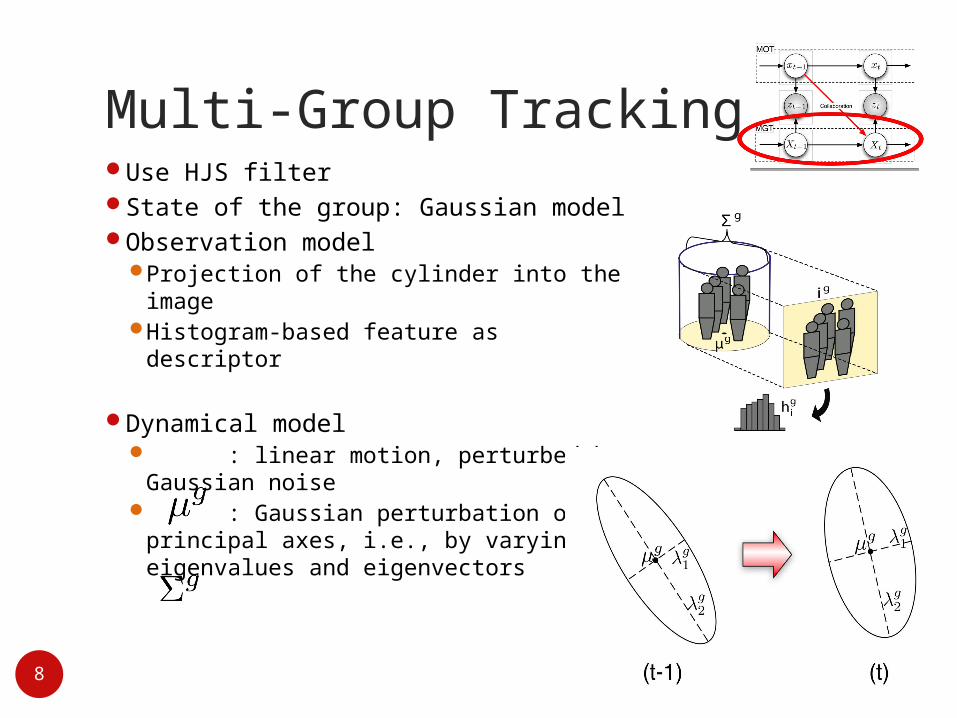
Multi-Group TrackingUse HJS filterState of the group: Gaussian modelObservation model
Projection of the cylinder into the image
Histogram-based feature as descriptor
Dynamical model : linear motion, perturbed by
Gaussian noise : Gaussian perturbation of its
principal axes, i.e., by varying its eigenvalues and eigenvectors
8
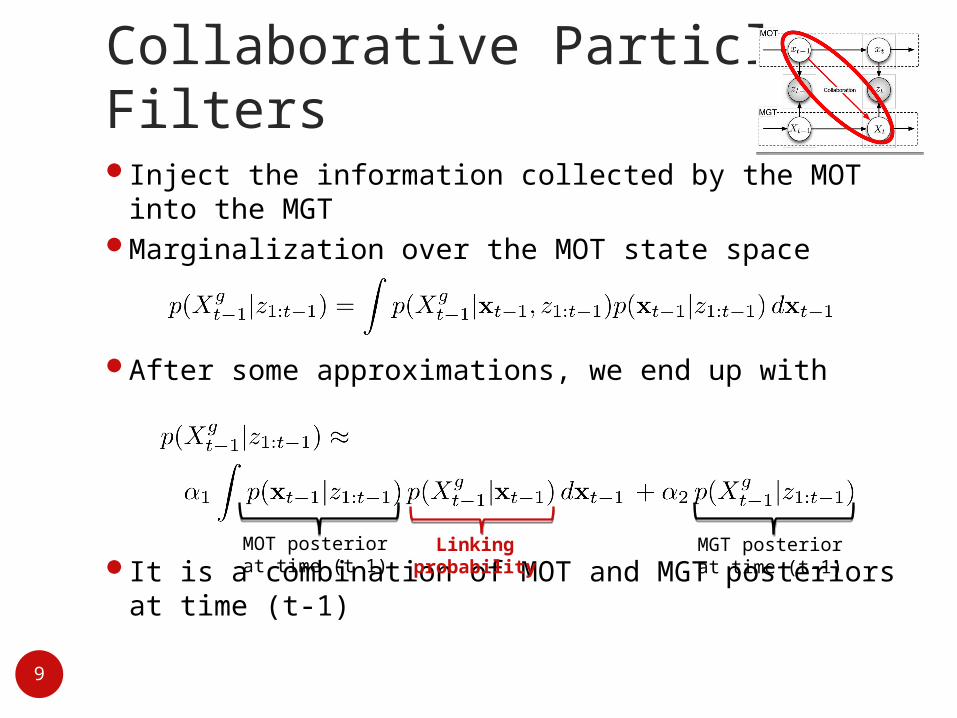
Collaborative Particle FiltersInject the information collected by the MOT into the
MGTMarginalization over the MOT state space
After some approximations, we end up with
It is a combination of MOT and MGT posteriors at time (t-1)
9
MOT posterior at time (t-1)
MGT posterior at time (t-1)
Linking probability
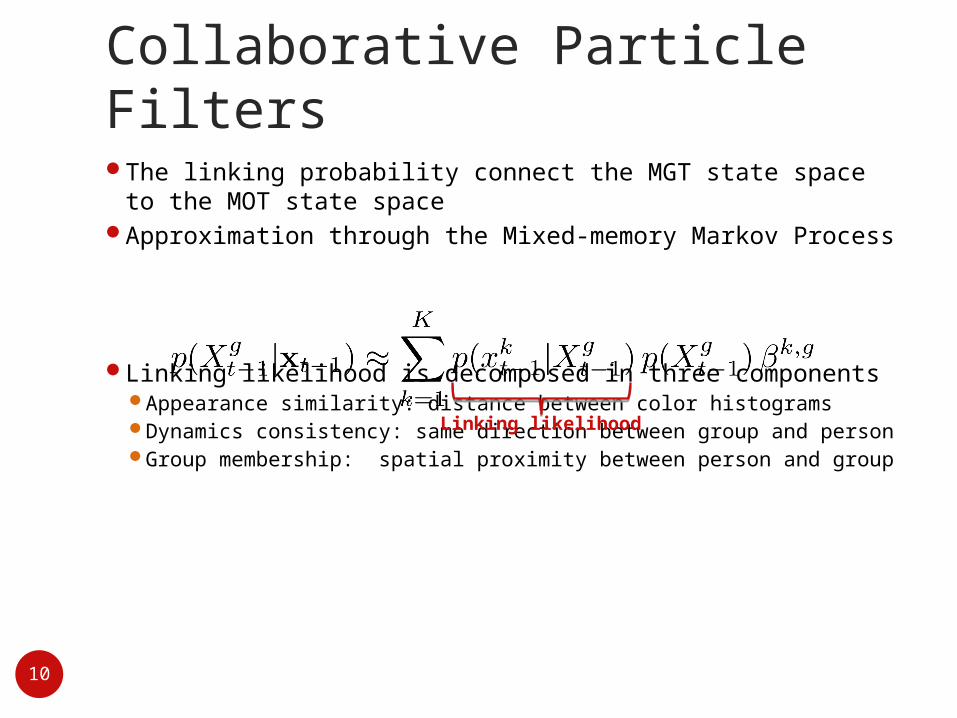
Collaborative Particle FiltersThe linking probability connect the MGT state space to
the MOT state spaceApproximation through the Mixed-memory Markov
Process
Linking likelihood is decomposed in three componentsAppearance similarity: distance between color histogramsDynamics consistency: same direction between group and personGroup membership: spatial proximity between person and group
10
Linking likelihood
Results
11
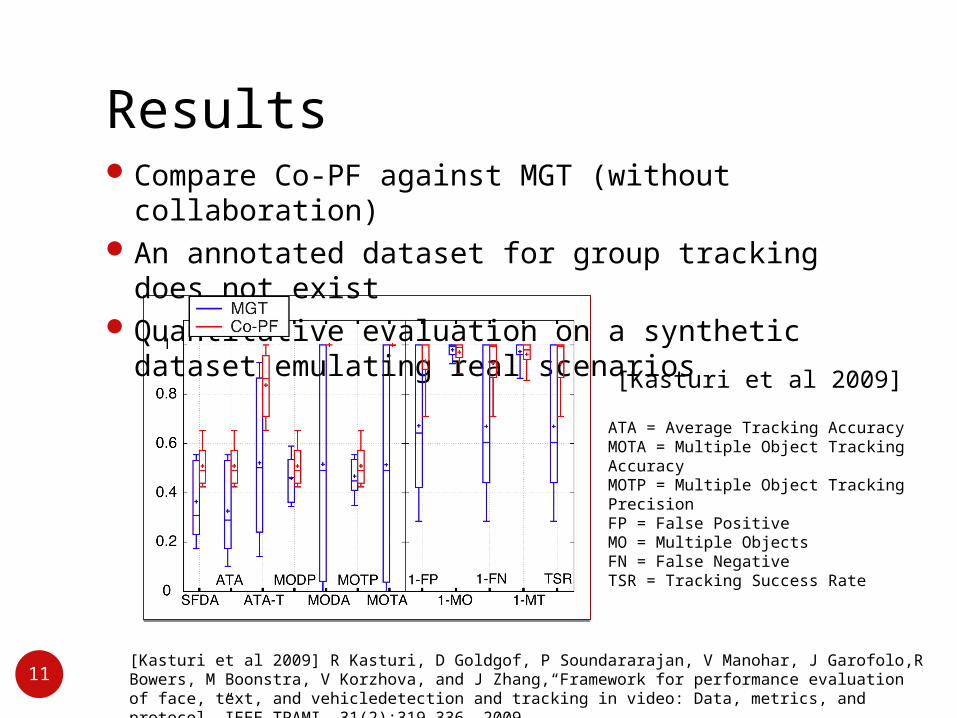
Compare Co-PF against MGT (without collaboration)An annotated dataset for group tracking does not
existQuantitative evaluation on a synthetic dataset
emulating real scenarios
ATA = Average Tracking AccuracyMOTA = Multiple Object Tracking Accuracy MOTP = Multiple Object Tracking PrecisionFP = False Positive MO = Multiple Objects FN = False Negative TSR = Tracking Success Rate
[Kasturi et al 2009]
[Kasturi et al 2009] R Kasturi, D Goldgof, P Soundararajan, V Manohar, J Garofolo,R Bowers, M Boonstra, V Korzhova, and J Zhang,“Framework for performance evaluation of face, text, and vehicledetection and tracking in video: Data, metrics, and protocol,”IEEE TPAMI, 31(2):319–336, 2009.
Results
12
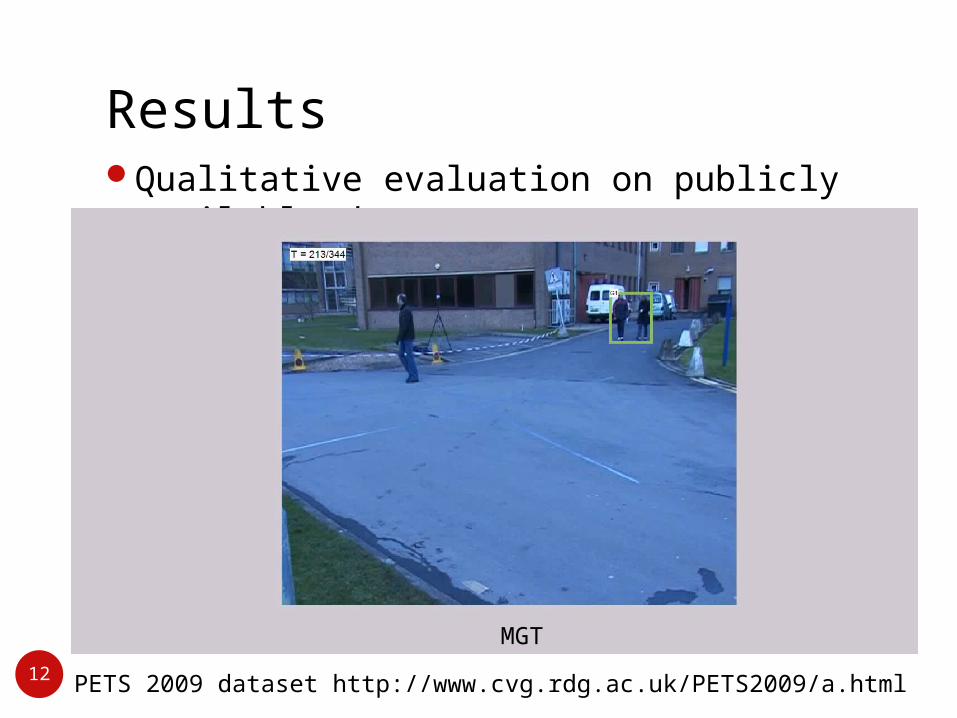
Qualitative evaluation on publicly available dataset
PETS 2009 dataset http://www.cvg.rdg.ac.uk/PETS2009/a.html
MGT
Results
13
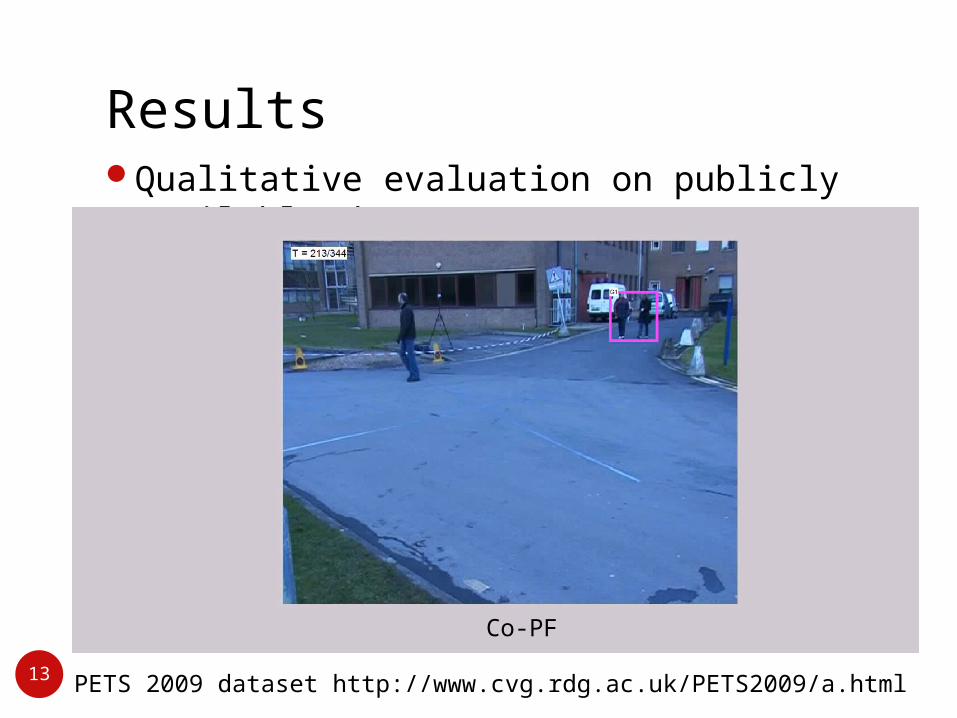
Qualitative evaluation on publicly available dataset
PETS 2009 dataset http://www.cvg.rdg.ac.uk/PETS2009/a.html
Co-PF
Results
14
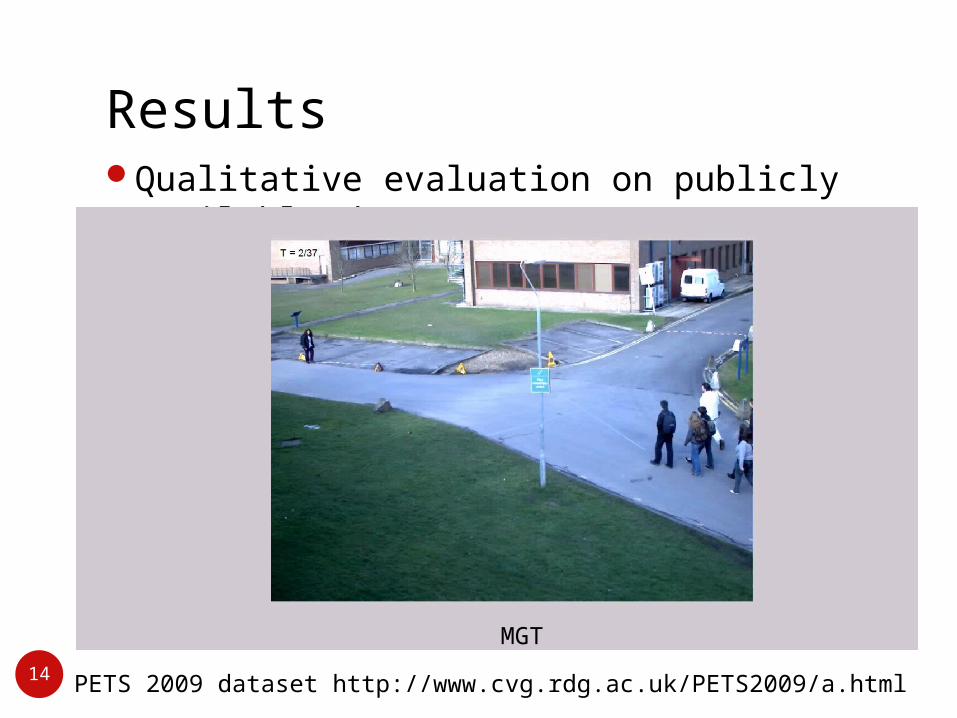
Qualitative evaluation on publicly available dataset
PETS 2009 dataset http://www.cvg.rdg.ac.uk/PETS2009/a.html
MGT
Results
15
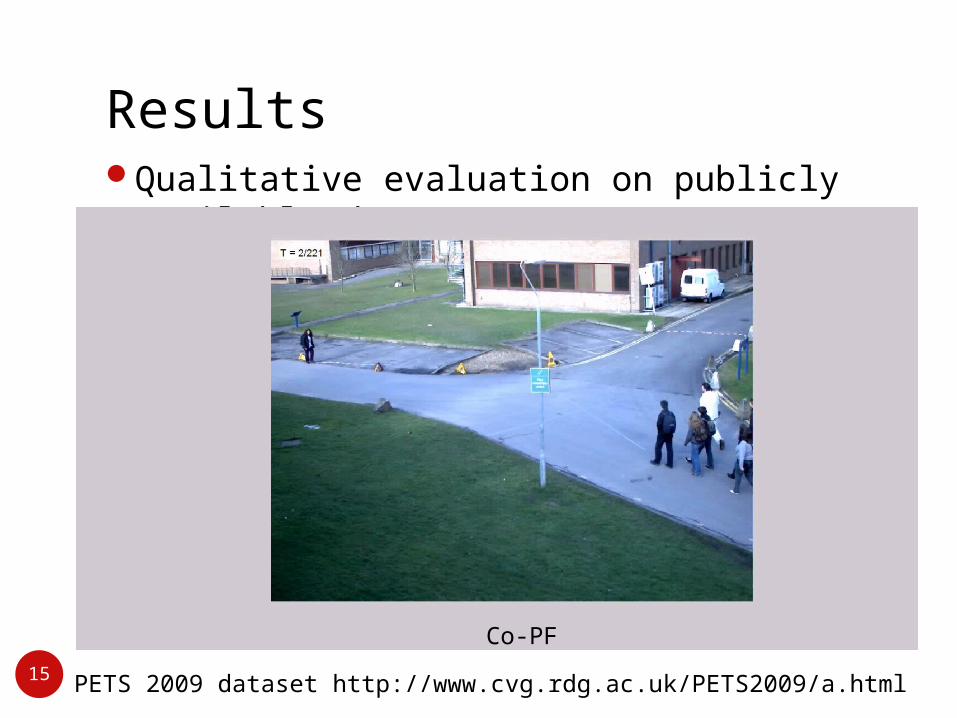
Qualitative evaluation on publicly available dataset
PETS 2009 dataset http://www.cvg.rdg.ac.uk/PETS2009/a.html
Co-PF
Conclusions
16
A probabilistic, collaborative framework for multi-group tracking have been proposed
Additional evidence on the individuals helps the group tracking in an effective way
The results prove that the collaboration between trackers improve the performances
Future directions:Collaboration on the other direction (MGT
MOT)Detection, split, and merge of the groups