locally optimal takagi-sugeno fuzzy controllers
DESCRIPTION
Locally Optimal Takagi-Sugeno Fuzzy Controllers. Mohammad javad Yazdanpanah [email protected]. Amir massoud Farahmand [email protected]. Department of Electrical and Computer Engineering University of Tehran Tehran, Iran. Fuzzy Control. Successful in many applications Ease of use - PowerPoint PPT PresentationTRANSCRIPT

Locally Optimal Takagi-Sugeno Fuzzy Controllers
Amir massoud [email protected]
Mohammad javad [email protected]
Department of Electrical and Computer EngineeringUniversity of Tehran
Tehran, Iran

Department of Electrical and Computer Engineering
University of Tehran
Fuzzy Control Successful in many applications Ease of use
Intuitive and interpretable Powerful nonlinear controller

Department of Electrical and Computer Engineering
University of Tehran
Takagi-Sugeno Plant Model)()(A(t)x THEN M is )( and ... and M is )( IF :R i
in
i11i tuBtxtxtx in +=&
( )( )∑=
+=r
iiii tuBtxAtxhtx
1
)()()()(&
∑=
= r
ii
ii
xw
xwxh
1
)(
)()(
,
∏=
=r
iiMk txxw k
i1
))(()( μ
Theorem 1. The continuous uncontrolled T-S fuzzy system is globally quadratically stable if there exists a common positive definite matrix P such that
r1,...,i ,0 =<+ iTi PAPA
Department of Electrical and Computer Engineering
University of Tehran
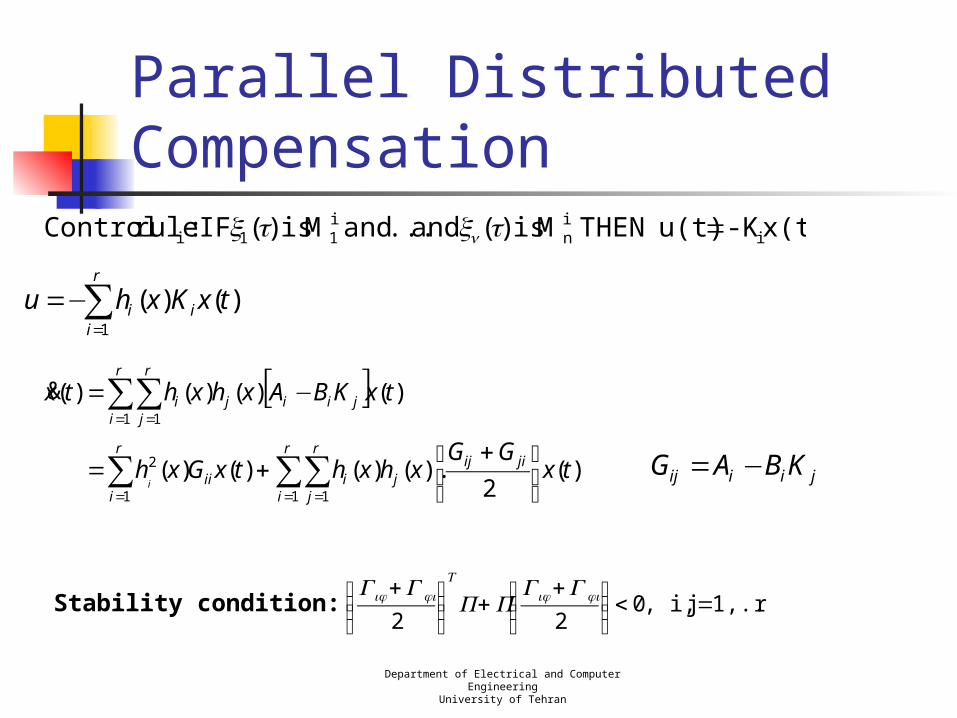
Parallel Distributed Compensation
x(t)-Ku(t) THEN M is )( and ... and M is )( IF :rule Control iin
i11i =txtx n
∑=
−=r
iii txKxhu
1
)()(
r1,...,ji, ,022
=<⎟⎟⎠
⎞⎜⎜⎝
⎛ ++⎟⎟
⎠
⎞⎜⎜⎝
⎛ + jiijT
jiij GGPP
GG
jiiij KBAG −=
Stability condition:

Department of Electrical and Computer Engineering
University of Tehran
Locally Optimal Design
( ) [ ]∫∞
+=0
.)(),( dtRuuQxxtutxJ TT
uBxAx ii +=& PBRK Ti
1−=
),( uxfx =&Linearization
ii BA ,
Locally optimal design

Department of Electrical and Computer Engineering
University of Tehran
Experiments: Problem description
Nonlinear Mass-Spring-Damper system( ) ( ) ( ) )()()()(),()( tutxtxftxtxgtxM &&&& φ=++
( ) ⎟⎟⎠⎞
⎜⎜⎝
⎛
−+−−−=
uxxxx
xtx
22
3112
2
13.04387.11.001.0)(&
( )0
0 13.001.0
10,210 xu
xx xx
uxfA ⎟⎟
⎠
⎞⎜⎜⎝
⎛−−−
=∂
∂=
==
( )
00
2213.04387.1
0,
xxx xu
uxfB ⎟⎟
⎠
⎞⎜⎜⎝
⎛
−=
∂
∂=
=

Department of Electrical and Computer Engineering
University of Tehran
Experiments: Fuzzy Settings
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ −−=
2
2
2
)(exp))((
σμ c
M
xxtxk
The dynamics of the plant is approximated using Gaussian membership function
Approximation error

Department of Electrical and Computer Engineering
University of Tehran
Experiments: Stabilization (I)
0 1 2 3 4 5 6 7-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
T
X2
0 1 2 3 4 5 6 7-1
0
1
2
3
4
5
T
X1
0 1 2 3 4 5 6 7-5
-4
-3
-2
-1
0
1
2
T
U
Comparison of T-S controller (bold) and linear controller (dotted) with different initial conditions
Both TS and linear controller are stable in this case. However, the behavior of fuzzy controller is smoother and with lower overshoot.

Department of Electrical and Computer Engineering
University of Tehran
Experiments: Stabilization (II)
0 1 2 3 4 5 6 7-2
0
2
4
6
8
10
T
x1
0 1 2 3 4 5 6 7-10
-8
-6
-4
-2
0
2
T
x2
0 1 2 3 4 5 6 7-6
-5
-4
-3
-2
-1
0
1
2
T
U
Response of T-S controller to (10 0)'
The linear controller is not stable in this case, but the fuzzy controller can handle it easily.
Department of Electrical and Computer Engineering
University of Tehran
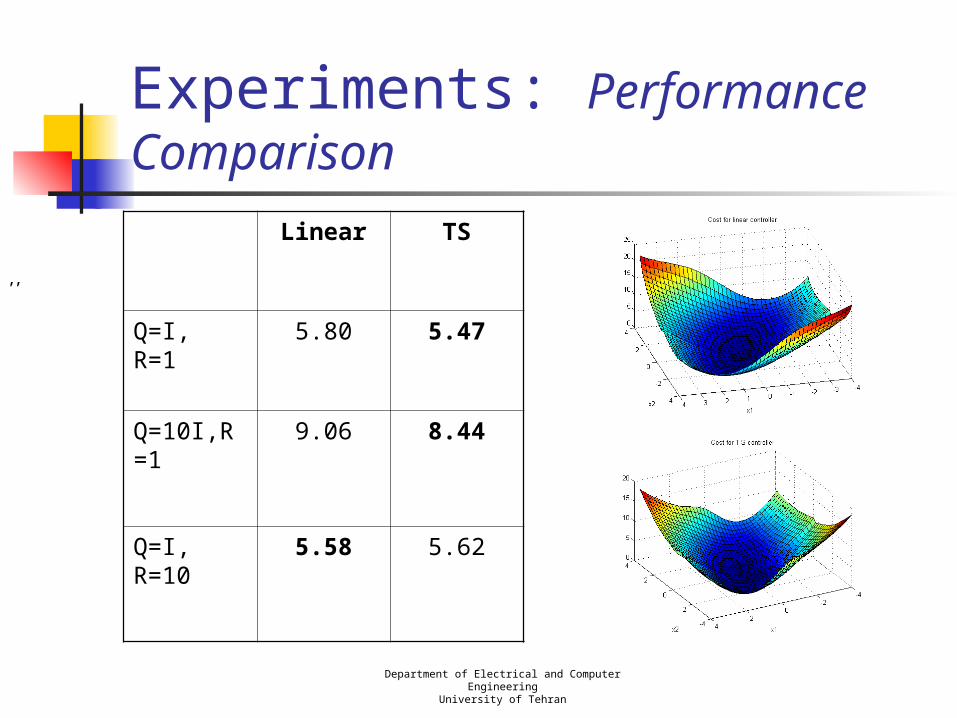
Experiments: Performance Comparison
Linear TS
Q=I, R=1 5.80 5.47
Q=10I,R=1
9.06 8.44
Q=I, R=10 5.58 5.62
, ,

Department of Electrical and Computer Engineering
University of Tehran
Experiments: Performance Comparison
x2
x1
Q=10I,I=1
-3 -2 -1 0 1 2 3
-4
-3
-2
-1
0
1
2
3
4
x2
x1
Q=I,I=1
-4 -3 -2 -1 0 1 2 3 4
-4
-3
-2
-1
0
1
2
3
4
Q=I,I=10
-4 -3 -2 -1 0 1 2 3 4
-4
-3
-2
-1
0
1
2
3
4
Fig. 3. Performance region comparison for different performance indices: (Q=1, R=1), (Q=10, R=1), and (Q=1, R=10), from left to right, respectively (dark region means linear one has better performance).

Department of Electrical and Computer Engineering
University of Tehran
Conclusions and Suggestions Conclusions
Stable Fuzzy Controller Local Optimality
How close is it to the global optimal solution?!
Suggestions Comparison with other T-S controllers Modeling error and stability (polytopic systems) Considering the effect of membership functions
explicitly