lineare algebra und analytische geometrie i und iinumteam1/material/script_la1und2... · lineare...
TRANSCRIPT

Lineare Algebra und Analytische Geometrie Iund II
Skript zur Vorlesung im WS 2015/2016 und SS2016
an der Humboldt-Universitat zu Berlin
Caren Tischendorf

Inhaltsverzeichnis
1 Elementare Grundlagen 81.1 Zahlbereiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2 Beweisfuhrung . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.2.1 Vollstandige Induktion . . . . . . . . . . . . . . . . . . 121.2.2 Direkter und indirekter Beweis . . . . . . . . . . . . . 14
2 Grundbegriffe der Linearen Algebra 142.1 Mengen und Abbildungen . . . . . . . . . . . . . . . . . . . . 142.2 Algebraische Strukturen . . . . . . . . . . . . . . . . . . . . . 262.3 Gruppen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.4 Ringe und Korper . . . . . . . . . . . . . . . . . . . . . . . . . 342.5 Vektorraume . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402.6 Linearkombinationen, lineare Unabhangigkeit, Erzeugenden-
system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432.7 Basis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3 Endlich erzeugte Vektorraume 523.1 Existenz einer Basis . . . . . . . . . . . . . . . . . . . . . . . . 523.2 Basiserganzungssatz . . . . . . . . . . . . . . . . . . . . . . . 533.3 Austauschsatz . . . . . . . . . . . . . . . . . . . . . . . . . . . 543.4 Dimension und Dimensionssatz . . . . . . . . . . . . . . . . . 563.5 Geometrische Anschauung endlich dimensionaler Vektorraume 59
4 Lineare Abbildungen und Matrizen 624.1 Lineare Abbildungen/Homomorphismen . . . . . . . . . . . . 624.2 Bild, Kern, Rang und Defekt linearer Abbildungen . . . . . . 704.3 Matrizen und lineare Gleichungssysteme . . . . . . . . . . . . 744.4 Darstellungsmatrizen und Basiswechsel . . . . . . . . . . . . . 974.5 Spezielle Klassen quadratischer Matrizen . . . . . . . . . . . . 103
5 Determinanten 1095.1 Multilineare Abbildungen . . . . . . . . . . . . . . . . . . . . 1095.2 Alternierende Abbildungen . . . . . . . . . . . . . . . . . . . . 1115.3 Die Determinantenform . . . . . . . . . . . . . . . . . . . . . . 1175.4 Die Determinante fur Endomorphismen . . . . . . . . . . . . . 1215.5 Die Determinante fur Matrizen . . . . . . . . . . . . . . . . . 1235.6 Der Entwicklungssatz von Laplace . . . . . . . . . . . . . . . . 1285.7 Die Cramersche Regel . . . . . . . . . . . . . . . . . . . . . . 130
2

6 Eigenwerte 1326.1 Das charakteristische Polynom . . . . . . . . . . . . . . . . . . 1366.2 Satz von Cayley-Hamilton . . . . . . . . . . . . . . . . . . . . 137
7 Affine Geometrie 1397.1 Affine Raume . . . . . . . . . . . . . . . . . . . . . . . . . . . 1397.2 Affine Basen, affine Koordinaten . . . . . . . . . . . . . . . . . 1467.3 Affine Abbildungen . . . . . . . . . . . . . . . . . . . . . . . . 1477.4 Hauptsatz der affinen Geometrie . . . . . . . . . . . . . . . . . 149
8 Euklidische und unitare Vektorraume 1518.1 Orthogonalitat . . . . . . . . . . . . . . . . . . . . . . . . . . 155
9 Zerlegungen 1639.1 Diagonalisierung . . . . . . . . . . . . . . . . . . . . . . . . . 1639.2 Die Singularwertzerlegung . . . . . . . . . . . . . . . . . . . . 1749.3 Trigonalisierung . . . . . . . . . . . . . . . . . . . . . . . . . . 1809.4 Die Jordansche Normalform . . . . . . . . . . . . . . . . . . . 184
3

Bezeichnungen
N Menge der naturlichen ZahlenZ Menge der ganzen ZahlenQ Menge der rationalen ZahlenR Menge der reellen ZahlenC Menge der komplexen Zahlen[a, b] x ∈ R : a ≤ x ≤ b(a, b] x ∈ R : a < x ≤ b[a, b) x ∈ R : a ≤ x < b(a, b) x ∈ R : a < x < b∀x fur alle x∃x es existiert ein x∃!x es existiert genau ein xa ∧ b a und ba ∨ b a oder ba⇔ b a genau dann, wenn ba := b a ist per Definition gleich bx ∈M x ist ein Element von Mx /∈M x ist kein Element von MM ⊆ N M ist eine Teilmenge von NM ⊂ N M ist eine echte Teilmenge von NM\N Menge aller Elemente von M , die nicht zu N gehorenM ∪N Vereiningung von M und NM ∩N Durchschnitt von M und NM ×N kartesisches Produkt von M und Nn∑i=1
ai Summe der Zahlen ai, wobei i ∈ 1, 2, ..., nn∏i=1
ai Produkt der Zahlen ai, wobei i ∈ 1, 2, ..., nf : M → N f ist eine Abbildung von M nach Nx 7→ f(x) x wird abgebildet auf f(x)
4

Griechisches Alphabet
α, A alphaβ, B betaγ, Γ gammaδ, ∆ deltaε, E epsilonζ, Z zetaη, H etaθ, Θ theta
ι, I iotaκ, K kappaλ, Λ lambdaµ, M myν, N nyξ, Ξ xio, O omikronπ, Π pi
%, P rhoσ, Σ sigmaτ , T tauυ, Y ypsilonϕ, Φ phiχ, X chiψ, Ψ psiω, Ω omega
5

Einfuhrung
Die lineare Algebra gehort zu den fundamentalen Gebieten der Mathematik.Gemeinsam mit der reellen Analysis bildet sie die Basis fur alle weiteren ma-thematischen Teilgebiete, wie z.B. Differentialgleichungen, Algebra, Numerik,Differentialgeometrie, Funktionalanalysis, Optimierung und Stochastik.
Die Lineare Algebra ist ein zentrales Modellierungswerkzeug. Man kann li-neare Strukturen viel besser verstehen und in ihnen denken kann als in nicht-linearen Strukturen. Obwohl die Welt um uns herum naturlich hauptsachlichdurch nichtlineare Phanomene beschrieben wird, fuhren die Methoden zurModellierung oder Analyse immer wieder auf lineare Prozesse, die das nicht-lineare Problem (lokal) naherungsweise approximieren oder beschreiben. Dienichtlineare Welt wird lokal linearisiert.
Schauen wir uns dazu ein paar Beispiele an.
Beispiel: Wettervorhersage. Im Stromungsfilm zur Wettervorhersage wirddie Teilchenbewegung der Luftmolekule dargestellt.
Quelle: https: // www. youtube. com/ watch? v= klGg_ dw5YAk
Mit Hilfe von Vektoren, lasst sich die die Starke und die Richtung der Luft-stromung in jedem Punkt beschreiben. Um nun Stromungen vorhersagen zukonnen, benotigt man als Rustzeug Regeln fur das Rechnen mit Vektoren.Diese Regeln werden wir im Rahmen der Vorlesung Lineare Algebra lernen.Daruberhinaus benotigt man auch noch Wissen zu Differentialgleichungenund zur Numerik. Dies wird in spateren Vorlesungen behandelt.
Beispiel: Numerischer Windkanal. Zur Simulation der Windbelastungvon Fahrzeugen oder Flugzeugen legt man ein Gitter uber und um die Ober-flachenstrukturen. Dort, wo die Belastung am hochsten ist, verfeinert mandas Gitter, um prazisere Vorhersagen treffen zu konnen. Fur diese Vorher-sagen muss man u.a. extrem große lineare Gleichungssysteme losen. In derVorlesung zur linearen Algebra werden wir allgemeine Prinzipien lernen, wieman lineare Gleichungssysteme beliebig hoher Dimension losen kann. In der
6

Praxis zeigt sich jedoch, dass man mit diesen allgemeinen Prinzipien schnellan die Kapazitatsgrenzen eines Rechners gelangt.
Quelle: https: // www. youtube. com/ watch? v= fW_ j6oXGgoY
Daher lernt man spater in der Numerik, wie man solche Systeme deutlichschneller losen kann, wenn man bestimmte Strukturen ausnutzt.
Beispiel: Tacoma-Narrows-Brucke. Die erste Tacoma-Narrows-Bruckeim Bundesstaat Washington wurde 1938-1940 als Hangebrucke erbaut undsturzte nach nur vier Monaten Betriebszeit am 7. November 1940 aufgrundwinderregter Schwingungen spektakular ein.
Quelle: https: // www. youtube. com/ watch? v= 3mclp9QmCGs
Am 7. November 1940 kam aus sudwestlicher Richtung, quer zur Brucke,Starkwind auf. Dadurch geriet die Brucke in einen anderen Schwingungsmo-dus und fuhrte jetzt erstmals Torsionsschwingungen aus. Bei diesem Modushandelte es sich um eine so genannte selbsterregte Schwingung oder auchEigen-Schwingung, die anders als die Resonanzschwingung keine Anregungmit einer bestimmten Frequenz erfordert. Nach einer dreiviertel Stunde ris-sen bei einer Windgeschwindigkeit von 67 km/h (Windstarke 8) die Seile und
7

die Fahrbahn sturzte in die Tacoma Narrows.Um solche Eigenschwingungen zu verhindern, benotigt man sogenannte Ei-genwertanalysen, die wir am Ende der Vorlesung behandeln werden.
1 Elementare Grundlagen
Dieser Abschnitt beschaftigt sich mit elementaren Werkzeugen der Mathe-matik, die aus der Schule bekannt sein sollten. Sie werden hier noch ein-mal wiederholt, um die notigen Grundlagen fur die folgenden Abschnitte zurVerfugung zu haben.
1.1 Zahlbereiche
Schon als Kind lernt man die naturlichen Zahlen kennen, die uns die Mog-lichkeit geben, bestimmte Dinge zu zahlen. Wir bezeichnen die naturlichenZahlen mit
N = 0, 1, 2, 3, 4, ....Wir konnen naturliche Zahlen addieren und multiplizieren, ohne dabei dieMenge der naturlichen Zahlen zu verlassen. So haben wir beispielsweise
3 + 4 = 7 ∈ N oder 3 · 4 = 12 ∈ N.
Allgemein gilt:
Wenn a ∈ N und b ∈ N, dann a+ b ∈ N und a · b ∈ N
Doch wenn wir zwei naturliche Zahlen subtrahieren wollen, dann haben wirmanchmal Probleme, so z.B.
9− 5 = 4 ∈ N, aber 5− 9 /∈ N.
Um beliebig subtrahieren zu konnen, benotigen wir die ganzen Zahlen
Z = ...,−4,−3,−2,−1, 0, 1, 2, 3, 4, ....
Nun finden wir5− 9 = −4 ∈ Z.
Wenn wir bestimmte Dinge teilen wollen, etwa einen Kuchen in 12 Stucke,dann reichen uns die ganzen Zahlen nicht mehr, denn
1 : 6 =1
6/∈ Z.
8

Dazu mussen wir unseren Zahlbereich auf die rationalen Zahlen
Q =pq, wobei p ∈ Z und q ∈ Z\0
erweitern. Neben der Bruchschreibweise, verwendet man manchmal auch dieDezimaldarstellung, z.B.
5
4= 1.25 oder
1
3= 0.3333...
Damit konnen wir ganz einfach vergleichen, welche der rationalen Zahlengroßer oder kleiner ist. Interessanter Weise kommt man aber auch mit denrationalen Zahlen nicht immer aus. So gibt es beispielsweise keine rationaleZahl a, fur die a2 = 2 gilt. Dennoch gibt es eine Dezimaldarstellung (mitunendlich vielen Nachkommastellen)
a =√
2 = 1.4142135...
Alle Zahlen mit einer Dezimaldarstellung konnen wir auf einer Zahlengeraden
darstellen. Alle Zahlen auf der Zahlengeraden bezeichnen wir als reelle Zah-len R. In der Analysis-Vorlesung werden Sie eine strenge mathematischeDefinition der reellen Zahlen uber Dedekindsche Schnitte kennenlernen.
Mit den reellen Zahlen kommt man in der Praxis haufig aus. Doch auch imBereich der reellen Zahlen konnen wir nicht beliebig rechnen. Jedenfalls gibtes keine reelle Zahl mit c mit c2 = −2. Dazu benotigt man die komplexenZahlen
C = c = a+ bi, wobei a ∈ R und b ∈ R.Dabei ist der Buchstabe i als sogenannte imaginare Einheit definiert, d.h.
i =√−1 bzw. i2 = −1.
Dann gilt fur c =√
2i, dass
c2 = (√
2i)2 = (√
2)2i2 = 2(−1) = −2.
Fur komplexe Zahlen c = a + bi bezeichnet man a als Realteil und b alsImaginarteil.
Die Menge der komplexen Zahlen findet auf der Zahlengeraden der reellenZahlen keinen Platz mehr. Dennoch konnen wir auch die komplexen Zahlengraphisch darstellen. Dazu benutzt man die Gaußsche Zahlenebene.
9

Darstellung der komplexen Zahlen in der Gaußschen Zahlenebene
Jede komplexe Zahl stellt genau einen Punkt in der Zahlenebene dar, diedurch die Achsen Re (fur den Realteil) und Im (fur den Imaginarteil) aufge-spannt wird.
Wir definieren|z| :=
√a2 + b2
als Absolutbetrag von z. Die Definition ist aus der geometrischen An-schauung geboren. Dazu betrachten wir die Darstellung komplexer Zahlen inPolarkoordinaten (r, ϕ), wobei r den Radius und ϕ den Winkel zur x-Achse(entgegen dem Uhrzeigersinn) beschreibt.
Darstellung der komplexen Zahlen in Polarkoordinaten
Mit diesen erhalten wir
a+ bi = r · cosϕ+ i · r · sinϕ = r (cosϕ+ i · sinϕ) .
Offenbar gilt fur z = a+ bi, dass
a2 + b2 = r2 cos2 ϕ+ r2 sin2 ϕ2 = r2(cos2 ϕ+ sin2 ϕ) = r2
10

und somit r =√a2 + b2 = |z|, d.h. der Absolutbetrag einer komplexen Zahl
z entspricht gerade der Lange r des zur komplexen Zahl z gehorigen Vektorsin der Gaußschen Zahlenebene.
Beispiel: Fur z = 1 +√
3i erhalten wir den Radius
r = |z| =√
12 + (√
3)2 = 2.
Fur den Winkel ϕ gilt
r cos(ϕ) = 1 und r sin(ϕ) =√
3
und somit
tan(ϕ) =r sin(ϕ)
r cos(ϕ)=
√3
1, d.h. ϕ =
π
3.
Fur komplexe Zahlen sind die grundlegenden Rechenoperationen wie folgtdefiniert. Seien z1 = a1 + b1i und z2 = a2 + b2i zwei komplexe Zahlen, wobeia1, a2, b1, b2 ∈ R. Dann haben wir per Definition
z1 + z2 = (a1 + b1i) + (a2 + b2i) = (a1 + a2) + (b1 + b2)i
z1 − z2 = (a1 + b1i)− (a2 + b2i) = (a1 − a2) + (b1 − b2)i
z1 · z2 = (a1 + b1i)(a2 + b2i) = a1a2 + a1b2i+ b1a2i+ b1b2i2
= (a1a2 − b1b2) + (a1b2 + b1a2)i.
Falls z2 6= 0, d.h. a2 6= 0 oder b2 6= 0, dann gilt
z1
z2
=a1 + b1i
a2 + b2i=
(a1 + b1i)(a2 − b2i)
(a2 + b2i)(a2 − b2i)
=a1a2 − a1b2i+ b1a2i− b1b2i
2
a22 − b2
2i2
=a1a2 + b1b2
a22 + b2
2
+b1a2 − a1b2
a22 + b2
2
i.
1.2 Beweisfuhrung
An dieser Stelle wollen wir ein paar wichtige Techniken der Mathematikkennenlernen, um eine Behauptung zu beweisen.
11

1.2.1 Vollstandige Induktion
Das Prinzip der vollstandigen Induktion ist ein verbluffend einfaches, abermachtiges Werkzeug, um Behauptungen zu beweisen, die fur alle naturlichenZahlen n ≥ n0 gelten sollen, z.B.
n∑i=1
i =n(n+ 1)
2fur n ≥ 1
Dann lautet das Prinzip der vollstandigen Induktion:
1. (Induktionsanfang) Man zeigt, dass die Aussage fur n = n0 richtigist.
2. (Induktionsvoraussetzung) Man nimmt an, dass die Aussage fur einbeliebiges n richtig ist.
3. (Induktionsbehauptung) Man behauptet, dass die Aussage fur n + 1richtig ist, wenn die Induktionsvoraussetzung erfullt ist.
4. (Induktionsschritt) Man zeigt, dass unter der Induktionsvorausset-zung die Induktionsbehauptung gilt.
Damit hat man die Behauptung fur alle n ≥ n0 bewiesen. Dies wird auffolgende Weise klar.
1. Die Aussage gilt fur n := n0 aufgrund des Induktionsanfangs.
2. Mit dem Induktionsschritt gilt die Aussage auch fur n := n0 + 1.
3. Mit dem Induktionsschritt gilt die Aussage auch fur n := n0 + 2.
4. Mit dem Induktionsschritt gilt die Aussage auch fur n := n0 + 3.
5. usw.
Die folgende Grafik veranschaulicht das Prinzip der vollstandigen Induktionmit Hilfe von Dominosteinen.
12

Prinzip der vollständigen Induktion
2 3 4 5 6 7 8 91
Aussage gilt für alle n≥1
Aussage gilt für alle n≥5
Aussage gilt für kein n(Induktionsanfang nicht erfüllt)
Aussage gilt für alle 1≤n≤5
...
...
...
...
Beispiel: Wir wollen nun die Richtigkeit der Aussagen∑k=1
(2k − 1) = n2 fur n ≥ 1 (1.1)
mit Hilfe der vollstandigen Induktion zeigen.
1. Induktionsanfang (IA): Die Behauptung gilt offenbar fur n = 1, denn
1∑k=1
(2k − 1) = 2 · 1− 1 = 1 = 12.
2. Induktionvoraussetzung (IV): Es gelte die Aussage fur n, d.h.
n∑k=1
(2k − 1) = n2
3. Induktionsbehauptung (IB): Die Aussage gilt dann auch fur n+ 1, d.h.
n+1∑k=1
(2k − 1) = (n+ 1)2
4. Induktionsschritt (IS): Wir trennen den letzten Summanden ab undnutzen die Induktionsvoraussetzung wie folgt:
n+1∑k=1
(2k − 1)i = [n∑k=1
(2k − 1)] + (2n+ 1)
IV= n2 + (2n+ 1) = (n+ 1)2
Damit haben wir die Richtigkeit der Aussage (1.1) bewiesen.
13

1.2.2 Direkter und indirekter Beweis
Sei B eine Behauptung, z.B. jede durch 2 und 3 teilbare naturliche Zahl istauch durch 6 teilbar oder es gibt unendlich viele Primzahlen.
Bei einem direkten Beweis zeigt man auf direktem Wege, dass die Behaup-tung B wahr ist.
Die erste Behauptung kann man einfach direkt beweisen, z.B. wie folgt: Sein eine durch 2 und 3 teilbare naturliche Zahl. Dann existieren naturlicheZahlen a, b, so dass
n = 2a und n = 3b.
Somit gilt 2a = 3b. Da 3 kein Teiler von 2 ist, so muss 3 dann ein Teilervon a sein, d.h. a = 3c fur eine naturliche Zahl c. Schließlich erhalten wirn = 2a = 2 · 3c = 6c, d.h. n ist durch 6 teilbar.
Bei einem indirekten Beweis nimmt man an, dass die Behauptung B falschist und fuhrt dies auf einen Widerspruch.
Ein indirekter Beweis fur die Unendlichkeit der Primzahlen ist folgender(von Euklid). Wir nehmen zunachst an, dass es nur endlich viele Primzahlenp1, p2, ..., pn gibt. Dann betrachten wir die Zahl
z = 1 + p1p2...pn = 1 +n∏i=1
pi.
Da jede Primzahl ein Teiler von∏n
i=1 pi ist, so ware jede Primzahl, die einTeiler von z ist, auch ein Teiler von 1. Also kann keine der Primzahlen pi einTeiler von z sein. Dies bedeutet, dass z eine Primzahl und z /∈ p1, p2, ..., pn,da z > pi fur alle i = 1, ..., n. Dies steht im Widerspruch zu der Annahme,dass p1, p2, ..., pn alle Primzahlen sind. Somit ist die Annahme falsch undwir haben gezeigt, dass es unendlich viele Primzahlen gibt.
2 Grundbegriffe der Linearen Algebra
2.1 Mengen und Abbildungen
Der Begriff einer Menge geht auf Georg Cantor zuruck. Er beschreibt eineMenge als eine Zusammenfassung von bestimmten Objekten zu einem Gan-zen. Die Objekte nennen wir Elemente. Als Kurzschreibweise verwendenwir
M = x |x hat eine bestimmte Eigenschaft.
14

Dabei ist M die Menge und x ein Element der Menge. So lassen sich diegeraden Zahlen z.B. wie folgt beschreiben:
M = x |x ist eine durch 2 teilbare naturliche Zahl= x ∈ N | 2 ist ein Teiler von x.
Mengen mit endlich vielen Elementen nennen wir endliche Mengen. Sielassen sich abzahlen und konnen durch Aufzahlung beschrieben werden, z.B.
M = 4, 5, 8, 9, 20.
Falls x ein Element einer Menge M ist, so schreiben wir
x ∈M (sprich: x Element von M oder x in M),
andernfalls x /∈M (sprich: x kein Element von M oder x nicht in M). Dabeigilt stets x ∈M oder x /∈M , aber niemals beides.
Bemerkung: Die hier gegebene Beschreibung von Mengen ist keine stren-ge mathematische Definition. Sie fuhrt auf Widerspruche wie das RusselscheParadoxon. Wir betrachten dazu folgende Menge. Zu der Menge gehoren alleMenschen, die vom Frisor Fritz die Haare geschnitten bekommen. Dabei gel-te die Regel, dass Frisor Fritz nur denen die Haare schneidet, die sich nichtselbst ihre Haare schneiden. Wir konnen nicht entscheiden, ob Fritz zu dieserMenge gehort. Wenn er sich selbst nicht die Haare schneidet, dann mussteer es laut Regel doch tun. Wenn er sich die Haare schneidet, dann durfte erdies laut Regel nicht tun. Durch einen axiomatischen Aufbau der Mengenleh-re kann man das Russelsche Paradoxon umgehen. Doch erfordert dieser eineReihe formaler Uberlegungen, auf die wir hier zu Beginn des Studiums ver-zichten wollen. Fur den mathematischen Alltag spielen die formalen Aspektekaum eine Rolle.
Nun wollen wir ein paar nutzliche Operationen auf Mengen kennenlernenund ein paar bequeme Schreibweisen einfuhren.
Der Allquantor ∀ und der Existenzquantor ∃ sind verkurzte Schreibweisenfur folgende Terme:
• ∀x ∈M : bedeutet ”fur alle x ∈M gilt”.
• ∃x ∈M : bedeutet ”es gibt ein x ∈M , so dass”.
• ∃!x ∈M : bedeutet ”es gibt genau ein x ∈M , so dass”.
15

Definition 2.1. Seien M und N Mengen. Dann heißt M eine Teilmengevon N (in Zeichen: M ⊆ N), falls jedes x ∈M auch ein Element von N ist,d.h.
∀x ∈M : x ∈ N.
Die Mengen M und N sind gleich, falls M ⊆ N und N ⊆M gilt.
Beispiel: Fur eine Menge M = 2, 7, 9, 20 ist N1 := 7, 20 eine Teilmengevon M und N2 := 7, 8 keine Teilmenge von M .
Definition 2.2. Seien M1, M2 Mengen.
• Vereinigung: Die Vereinigung M1 ∪M2 ist definiert durch
M1 ∪M2 = x |x ∈M1 oder x ∈M2
• Durchschnitt: Der Durchschnitt M1 ∩M2 ist definiert durch
M1 ∩M2 = x |x ∈M1 und x ∈M2
• Differenz: Die Differenz M1 \M2 ist definiert durch
x ∈M1 \M2 ⇔ x ∈M1 ∧ x /∈M2.
• Komplement: Ist M1 ⊆M2, so ist das Komplement McM21 von M1 in
M2 definiert durch
McM21 = M2 \M1.
Wenn klar ist, in welcher Gesamtmenge M2 man das Komplement bil-det, dann schreiben wir auch nur kurz M c
1 .
Schauen wir uns zur Veranschaulichung ein kleines Beispiel an.
Beispiel: Seien M1 := 2, 5, 9, 11, 15, M2 := 3, 5, 7, 11, M3 = 2, 11,M4 = N. Dann gilt
M1 ∪M2 ∪M3 = 2, 3, 5, 7, 9, 11, 15M1 ∩M2 ∩M3 = 11
M2 \M3 = 3, 5, 7M c
3 = M cN3 = x ∈ N | x 6= 2 ∧ x 6= 11
16

Bemerkung 2.3. Sei I eine Indexmenge (d.h. eine Menge von Indizes) undsei Mi fur jedes i ∈ I eine Menge. Dann ist die Vereinigung aller MengenMi wie folgt definiert:
x ∈⋃i∈I
Mi ⇔ ∃ i ∈ I : x ∈Mi.
Der Durchschnitt aller Mengen Mi ist definiert als:
x ∈⋂i∈I
Mi ⇔ ∀ i ∈ I : x ∈Mi.
Beispiel: Sei i ∈ N und Mi := 0, 1, 2, ..., i. Dann gilt⋃i∈N
Mi = N und⋂i∈N
Mi = 0.
Definition 2.4. Folgende Mengen spielen eine besondere Rolle.
• leere Menge: Die leere Menge ∅ ist dadurch charakterisiert, dass siekein Element enthalt.
• Potenzmenge: Die Potenzmenge P (M) einer Menge M ist definiertals die Menge aller Teilmengen von M und es gilt
N ∈ P (M)⇔ N ⊆M.
Fur die Potenzmenge einer Menge M gilt immer ∅ ∈ P (M) und M ∈ P (M).
Beispiel: Sei M = 1, 2. Dann gilt P (M) = ∅, 1 , 2 , 1, 2.
Zur Beschreibung von Beziehungen zwischen Mengen verwenden wir Abbil-dungen.
Definition 2.5. Eine Abbildung ist eine Vorschrift, die jedem Element xeiner Menge D genau einen Wert f(x) einer weiteren Menge W zuordnet.Die Menge D nennt man den Definitionsbreich, die Menge W den Wer-tebereich (Wertevorrat) der Abbildung/Funktion f . Als Kurzschreibweisehat sich die Notation
f : D → W
durchgesetzt. Fur den Zugriff auf die Werte schreibt man kurz
x 7→ f(x)
17

Abbildung 2.1: Elektrokardiagramm
Aus der Schule kennt man Abbildungen beispielsweise schon als Funktionenf(x) fur x ∈ R, z.B.
f : R→ Rx 7→ f(x) = x2.
In der Praxis begegnet man eigentlich uberall irgendwelchen Abbildungen.So berechnet beispielsweise jedes Unternehmen monatlich seinen Gewinn.Damit haben wir eine Abbildung von Monaten in die reellen Zahlen.
Selbst in der Medizin begegnen wir Abbildungen. Der Kardiologe wertetzur Leistungsfahigkeit des Herzens sogenannte Elektrokardiagramme (EKGs)aus, siehe Abb. 2.1. Ein Standard-EKG enthalt 12 Abbildungen/Funktio-nen. Zu jedem Zeitpunkt t wird die Spannung zwischen je zwei Punktendes Korpers gemessen und aufgezeichnet (Abbildung I zwischen rechtem undlinkem Arm, Abbildung II zwischen rechtem Arm und linken Bein, usw.).Ubrigens sprechen die Mediziner nicht allgemein von Abbildungen sondernvon Ableitungen. Dies ruhrt daher, dass die gemessenen Spannungen Poten-tialanderungen sind und naherungsweise die erste Ableitung (im mathemati-schen Sinn) des elektrostatischen Potentials darstellen. Der Kardiologe kanndurch Auswertung der Kurven in bestimmten Zeitintervallen feststellen, obdie Herztatigkeit krankhafte Veranderungen aufweist.
18

Achtung: Der Wertebereich W einer Funktion muss nicht ausgeschopft wer-den. Der Wertebereich gibt nur an, dass die Werte f(x) einer Funktion f furjedes x ∈ D zu W gehoren, d.h.
∀x ∈ D : f(x) ∈ W.
Doch es bedeutet nicht, dass es fur jedes w ∈ W auch ein x ∈ D gibt, sodass w = f(x). Außerdem konnen Abbildungen fur verschiedene x ∈ D aufden gleichen Wert w fuhren.
Beispiel: Wir betrachten wieder
f : R→ Rx 7→ f(x) = x2.
Offenbar gilt x2 ∈ R, falls x ∈ R. Doch es gibt kein x ∈ D = R, so dassx2 = −1, obwohl −1 ∈ W = R. Außerdem gilt fur alle x ∈ R, dass
f(x) = x2 = (−x)2 = f(−x).
Doch sind solche Abbildungen besonders interessant, bei denen der Wertebe-reich ausgeschopft wird oder jeder Wert w ∈ W nur durch genau ein x ∈ Derreicht wird. Dazu definieren wir
Definition 2.6. Eine Abbildung f : D → W heißt surjektiv, falls
∀w ∈ W ∃x ∈ D : f(x) = w.
Eine Abbildung f : D → W heißt injektiv, falls fur alle x1 ∈ D und x2 ∈ Dgilt:
Wenn f(x1) = f(x2), dann x1 = x2.
Eine Abbildung f : D → W heißt bijektiv, falls sie injektiv und surjektivist.
Nun konnen wir leicht folgenden Satz folgern.
Satz 2.7. Eine Abbildung f : D → W ist bijektiv genau dann, wenn folgendeAussage gilt:
∀w ∈ W ∃!x ∈ D : f(x) = w.
19

Beweis: Wir zeigen zuerst die Richtung (⇒). Sei f : D → W bijektiv.Dann ist f surjektiv und injektiv. Sei w ∈ W beliebig. Da f surjektiv ist,so gibt es ein x ∈ D, so dass f(x) = w. Wir mussen nun noch zeigen, dasses nur ein solches x ∈ D gibt. Wir nehmen an, dass es zwei verschiedene x1,x2 ∈ D gibt, so dass f(x1) = w und f(x2) = w. Dann gilt f(x1) = f(x2)und aufgrund der Injektivitat, dass x1 = x2. Dies ist ein Widerspruch zurAnnahme, d.h. es gibt nur ein x ∈ D mit f(x) = w.Wir zeigen nund die andere Richtung (⇐). Es gelte die Aussage, dass
∀w ∈ W ∃!x ∈ D : f(x) = w.
Dann ist f offenbar surjektiv, denn
∀w ∈ W ∃x ∈ D : f(x) = w.
Es bleibt zu zeigen, dass die Funktion f auch injektiv ist. Seien x1, x2 ∈ Dmit f(x1) = f(x2). Dann ist w := f(x1) = f(x2) ∈ W . Nach Voraussetzungexistiert genau ein x ∈ D mit f(x) = w, d.h. x1 = x = x2. 2
Beispiel: Wir betrachten nun
f : R→ W := w ∈ R : w ≥ 0x 7→ f(x) = x2.
Offenbar gibt es zu jedem w ∈ W ein x :=√w ∈ R, so dass
f(x) = (√w)2 = w.
Also ist f : R→ W surjektiv.
Beispiel: Wir betrachten jetzt
f : D := x ∈ R : x ≥ 0 → Rx 7→ f(x) = x2.
Falls x1 ∈ D und x2 ∈ D mit f(x1) = f(x2), dann gilt
x21 = f(x1) = f(x2) = x2
2.
Da x1 ≥ 0 und x2 ≥ 0, so gilt offenbar x1 = x2. Also ist f : R→ W injektiv.
Als Ubung kann man sich uberlegen, dass die Abbildung
f : x ∈ R : x ≥ 0 → w ∈ R : w ≥ 0x 7→ f(x) = x2.
20

bijektiv ist.
Ist eine Abbildung f : D → W bijektiv, so gibt es nicht nur eine eindeu-tige Zuordnung x 7→ f(x), sondern auch umgekehrt von f(x) 7→ x. Mannennt bijektive Abbildungen daher auch eineindeutig. Die Abbildung mitder umgekehrten Zuordnung f(x) 7→ x nennt man Umkehrabbildung undschreibt
f−1 : W → D
w 7→ f−1(w) = x.
Hierbei gilt f−1(w) = x genau dann, wenn w = f(x).
Achtung: Die Umkehrabbildung f−1 einer Abbildung f : R → R darf mannicht mit der Abbildung 1
fverwechseln, die durch
1
f: R\w ∈ R | f(w) 6= 0 → R
w 7→ 1
f(w)
gegeben ist und fur w ∈ R mit f(w) = 0 gar nicht definiert ist.
Beispiel: Sei
f : R→ Rx 7→ f(x) = x3.
Offenbar ist f bijektiv und es gilt
f−1 : R→ R
w 7→ f−1(w) =
3√w w ≥ 0
− 3√−w w < 0
Doch die Abbildung 1f
ist nur fur w 6= 0 definiert und es gilt
1
f: R\0 → R
w 7→ 1
f(w) =
1
w3.
Ein wenig uberraschend ist folgender Satz fur endliche Mengen.
21

Satz 2.8. Sei X eine endliche Menge und f : X → X eine Abbildung. Dannsind folgende Aussagen aquivalent.
(i) f ist surjektiv.
(ii) f ist injektiv.
(iii) f ist bijektiv.
Beweis: Da aus (iii) bereits fur beliebige Abbildungen stets (i) und (ii)folgen, so reicht es zu zeigen, dass (i)→(iii) und (ii)→(iii). Sei
X = x1, ..., xn,
wobei die Objekte xi alle voneinander verschieden sind.(i)→(iii) Da f surjektiv ist, so gilt
f(x1), ..., f(xn) = X.
Da X genau n verschiedene Elemente enthalt, so sind die Funktionswertef(xi) auch alle voneinander verschieden, d.h. f ist injektiv und somit bijektiv.
(ii)→(iii) Da f injektiv ist, so sind die Funktionswerte f(xi) alle voneinanderverschieden. Zudem wissen wir, dass
f(x1), ..., f(xn) ⊆ X.
Da f(x1), ..., f(xn) und X beide genau n verschiedene Elemente enthalten,so gilt f(x1), ..., f(xn) = X, d.h. f ist surjektiv und somit auch bijektiv. 2
Wir betrachten nun die Hintereinanderausfuhrung von Abbildungen.
Definition 2.9. Seien f : X → Y und g : Y → Z zwei Abbildungen, dannist die Komposition bzw. Verknupfung g f beider Abbildungen definiertals
g f : X → Z
x 7→ (g f)(x) = g(f(x)).
Bemerkung: Die Verknupfung von Funktionen ist assoziativ, d.h. fur belie-bige Abbildungen f : X → Y , g : Y → Z und h : Z → W gilt:
(h g) f = h (g f).
22

Davon kann man sich leicht wie folgt uberzeugen: ∀x ∈ X :
((hg)f)(x) = (hg)(f(x)) = h(g(f(x))) = h((g f)(x)) = (h (g f))(x).
Man teste zur eigenen Ubung, ob die Verknupfung von Funktionen auchkommutativ ist, d.h.
f g = g f ?
Bemerkung 2.10. Seien f : X → Y und g : Y → Z Abbildungen. Danngelten folgende Aussagen
(i) Wenn f und g injektiv sind, so ist auch g f injektiv
(ii) Wenn f und g surjektiv sind, so ist auch g f surjektiv.
(ii) Wenn g f injektiv ist, so ist f injektiv.
(iv) Wenn g f surjektiv ist, so ist g surjektiv.
Beweis:
(i) Ubungsaufgabe
(ii) Sei z ∈ Z. Da g surjektiv ist, so existiert ein y ∈ Y mit g(y) = z. Da fsurjektiv ist, so existiert ein x ∈ X mit f(x) = y. Daraus folgt
(g f)(x) = g(f(x)) = g(y) = z.
D.h. g f ist surjektiv.
(iii) Ubungsaufgabe
(iv) Sei z ∈ Z. Da gf surjektiv ist, so existiert ein x ∈ X mit g(f(x)) = z.Sei y := f(x). Dann gilt y ∈ Y und g(y) = g(f(x)) = z, d.h. g istsurjektiv.
2
Bemerkung 2.11. Wenn g f injektiv ist, so muss g nicht injektiv sein.Wenn g f surjektiv ist, so muss f nicht surjektiv sein. Man betrachte furbeide Aussagen beispielsweise die Funktionen g : Z → N mit x 7→ |x| undf : N→ Z mit x 7→ −x.
Definition 2.12. Sei X eine nichtleere Menge. Wir bezeichnen eine Abbil-dung f : X → X als die identische Abbildung idX , falls
idX(x) = f(x) = x ∀x ∈ X.
23

Lemma 2.13. Sei f : X → W eine Abbildung, wobei X und W nichtleereMengen sind. Dann gilt
(i) f ist genau dann injektiv, wenn es eine Abbildung h : W → X gibt, sodass h f = idX .
(ii) f ist genau dann surjektiv, wenn es eine Abbildung h : W → X gibt,so dass f h = idW .
(iii) f ist genau dann bijektiv, wenn es eine Abbildung h : W → X gibt, sodass h f = idX und f h = idW . In diesem Fall ist h = f−1.
Beweis: (iii) ist eine Folgerung aus (i) und (ii).
(i) (→) Sei f injektiv. Sei x∗ ∈ X ein fest gewahltes Element. Nun definierenwir fur w ∈ W die Funktion
h(w) :=
x, falls w ∈ f(X) und x ∈ X : f(x) = w
x∗, falls w /∈ f(X).
Wie bereits aus den Ubungen bekannt, ist die Menge f(X) definiert als
f(X) := w ∈ W | ∃ x ∈ X : f(x) = w.
Die Funktionswerte von h sind eindeutig bestimmt, da f injektiv ist. Zudemgilt fur alle x ∈ X, dass
(h f)(x) = h(f(x)) = h(w) = x.
(←) Sei jetzt h eine Abbildung mit h f = idX . Seien weiter x1 ∈ X undx2 ∈ X mit f(x1) = f(x2) gegeben. Dann gilt
x1 = h(f(x1)) = h(f(x2)) = x2.
(ii) Ubungsaufgabe 2
Auch wenn man keine bijektive Abbildung f : D → W hat, so kann mandennoch eine Umkehrabbildung f−1 formulieren. Diese bildet dann aber nichtElemente auf Elemente, sondern Mengen auf Mengen ab. Hierbei definiertman
f−1 : P(W )→ P(D)
M 7→ f−1(M) = x ∈ D : f(x) ∈M.
24

Man nennt f−1(M) das Urbild von M . Ist f nicht surjektiv, so gibt esElemente w ∈ W mit f−1(w) = ∅. Ist f nicht injektiv, so gibt es Elementew ∈ W , fur die f−1(w) mindestens zwei verschiedene Elemente enthalt.
Zum Schluss dieses Abschnitts betrachten wir noch zwei wichtige Begriffe furMengen.
Definition 2.14. Seien n Mengen X1, ..., Xn gegeben. Dann bezeichnet dieMenge X1 × X2 × ... × Xn das Produkt der Mengen X1, ..., Xn und esist definiert:
z = (x1, ..., xn) ∈ X1×X2× ...×Xn ↔def
x1 ∈ X1, x2 ∈ X2, ..., xn ∈ Xn.
Beispiel: Sei X := 3, 4 und Y = 1, 5, 7. Dann gilt
X × Y = (3, 1), (3, 5), (3, 7), (4, 1), (4, 5), (4, 7).
R2 := R× R = (x, y) | x ∈ R ∧ y ∈ RCn := C× C× ...× C︸ ︷︷ ︸
n−mal
= (x1, x2, ..., xn) | ∀i = 1, ..., n : xi ∈ C
Definition 2.15. Sei X eine nichtleere Menge. Dann heißt ∼ eine Aquiva-lenzrelation auf X, falls fur beliebige x, y, z ∈ X folgendes gilt:
(i) x ∼ x, d.h. ∼ ist reflexiv.
(ii) x ∼ y ↔ y ∼ x, d.h. ∼ ist symmetrisch.
(iii) x ∼ y ∧ y ∼ z → x ∼ z, d.h. ∼ ist transitiv.
Beispiel: Sei X := Z und sei
x ∼ y ↔def
x− y ist durch 3 teilbar.
fur beliebige x, y ∈ Z. Dann ist ∼ eine Aquivalenzrelation, denn fur beliebigex, y, z ∈ Z gilt:
(i) x ∼ x, da x− x = 0 durch p teilbar ist.
(ii) x ∼ y ↔ 3|(x− y)↔ 3|(y − x)↔ y ∼ x.
25

(iii) Da x ∼ y und y ∼ z, so existieren ganze Zahlen a, b, so dass x−y = 3aund y − z = 3b. Damit gilt
x− z = x− y + y − z = 3a+ 3b = 3(a+ b),
d.h. 3 ist ein Teiler x− z, d.h. x ∼ z.
Definition 2.16. Sei ∼ eine Aquivalenzrelation auf einer nichtleeren MengeX und a ∈ X. Dann heißt die Menge
[a]∼ := x ∈ X | x ∼ a
Aquivalenzklasse zur Aquivalenzrelation ∼ mit dem Reprasentanten a.Die Menge aller Aquivalenzklassen
M/∼ := [a]∼ | a ∈M
nennt man Faktormenge bzw. Quotientenmenge der Aquivalenzrelation ∼.
2.2 Algebraische Strukturen
Definition 2.17. Sei M eine nichtleere Menge. Dann heißt ∗ eine Ver-knupfung auf M , falls fur jedes x ∈ M und jedes y ∈ M gilt: x ∗ y ∈ M .Das Paar (M, ∗) nennt man eine algebraische Struktur.
Einfache Beispiele sind (N,+) oder (Q, ·). Ein weiteres Beispiel fur eine al-gebraische Struktur ist (P(X),∩) fur eine beliebige nichtleere Menge X.
Man uberlege sich, dass die Verknupfung von bijektiven Abbildungen f :X → X fur eine nichtleere Menge X auch eine Verknupfung im Sinne vonDefinition 2.17 ist (Ubungsaufgabe).
Schauen wir uns nun ein paar Eigenschaften algebraischer Strukturen an:
Definition 2.18. Sei (M, ∗) eine algebraische Struktur.
(i) (M, ∗) heißt eine kommutative algebraische Struktur, falls
∀x, y ∈M : x ∗ y = y ∗ x.
(ii) (M, ∗) heißt eine assoziative algebraische Struktur, falls
∀x, y, z ∈M : (x ∗ y) ∗ z = x ∗ (y ∗ z).
Mit dem Wissen aus der Schule sehen wir, dass z.B. (Z,+) und (R, ·) kom-mutative und assoziative algebraische Strukturen sind.
26

Definition 2.19. Sei (M, ∗) eine algebraische Struktur. Dann heißt e ∈ Mneutrales Element, falls
∀x ∈M : x ∗ e = e ∗ x = x.
Fur (N,+) ist 0 ein neutrales Element. Fur (Z, ·) ist 1 ein neutrales Element.Sei X eine nichtleere Menge. Auf der algebraischen Struktur (P(X),∪) ist ∅ein neutrales Element. Welches Element von P(X) ist ein neutrales Elementvon (P(X),∩)?
Bemerkung: Falls eine algebraische Struktur (M, ∗) ein neutrales Elementbesitzt, dann ist dies eindeutig.
Beweis: Seien e1 und e2 neutrale Elemente von (M, ∗). Dann gilt
e1 = e1 ∗ e2 = e2.
Die erste Gleichung gilt, da e2 ein neutrales Element ist. Die zweite Gleichunggilt, da e1 ein neutrales Element ist. 2
Definition 2.20. Sei (M, ∗) eine algebraische Struktur.
(i) (M, ∗) heißt eine Halbgruppe, falls (M, ∗) eine assoziative algebrai-sche Struktur ist, d.h. (M, ∗) eine algebraische Struktur ist und es gilt
∀a, b, c ∈M : a ∗ (b ∗ c) = (a ∗ b) ∗ c.
(ii) (M, ∗) heißt Monoid, falls (M, ∗) eine Halbgruppe mit einem neutralenElement ist.
(iii) (M, ∗) heißt eine kommutative Halbgruppe, falls (M, ∗) eine Halb-gruppe und ∗ kommutativ auf M ist, d.h.
∀a, b ∈M : a ∗ b = b ∗ a.
(iv) (M, ∗) heißt ein kommutatives Monoid, falls (M, ∗) ein Monoidund ∗ kommutativ auf M ist.
Beispiele: (N, ·) und (R,+) sind kommutative Halbgruppen und Monoide.
Definition 2.21. Sei (M, ∗) ein Monoid mit dem neutralen Element e. Dannheißt x ∈M invertierbar, falls es ein y ∈M gibt, so dass
x ∗ y = y ∗ x = e.
Die Menge der invertierbaren Elemente von M nennen wir M∗.
27

Bemerkung 2.22. Sei (M, ∗) ein Monoid mit dem neutralen Element e undx ∈M invertierbar. Dann existiert genau ein y ∈M mit x ∗ y = y ∗ x = e.
Beweis: Seien y1, y2 ∈M mit
x ∗ y1 = y1 ∗ x = e ∧ x ∗ y2 = y2 ∗ x = e.
Dann gilt
y1 = y1 ∗ e = y1 ∗ (x ∗ y2) = (y1 ∗ x) ∗ y2 = e ∗ y2 = y2.
2
Daher konnen wir dieses eindeutig bestimmte y auch mit x−1 bezeichnen.Wir nennen x−1 das inverse Element zu x.
Beispiele: (N,+) besitzt nur das invertierbare Element 0. Dafur sind alleElemente von (Z,+) invertierbar, denn fur x ∈ Z ist −x ∈ Z das inverseElement. Das inverse Element von x ∈ Q\0 fur (Q, ·) ist gleich 1
x. Null ist
kein invertierbares Element von (Q, ·).Es gelten folgende (leicht nachprufbare) Eigenschaften fur M∗ fur Monoide(M, ∗):
1. e ∈M∗,
2. x, y ∈M∗ ⇒ x ∗ y ∈M∗,
3. x ∈M∗ ⇒ x−1 ∈M∗.
2.3 Gruppen
Definition 2.23. Ein Monoid (M, ∗) heißt Gruppe, falls M = M∗
Bemerkung: Um zu zeigen, dass (M, ∗) eine Gruppe ist, muss man alsofolgende 4 Eigenschaften nachweisen:
(i) ∀x, y ∈M : x ∗ y ∈M (Verknupfung)
(ii) ∀x, y, z ∈M : (x ∗ y) ∗ z = x ∗ (y ∗ z) (Assoziativitat)
(iii) ∃ e ∈M : ∀x ∈M : e ∗ x = x ∗ e = x (neutrales Element)
(iv) ∀x ∈M ∃ y ∈M : y ∗ x = x ∗ y = e (inverses Element)
Definition 2.24. Eine Gruppe (M, ∗) heißt abelsche Gruppe, falls sie einekommutative Gruppe ist.
28

Beispiele:(Z,+) sowie (Q\0, ·) sind abelsche Gruppen. Aber (Z, ·) ist z.B. keineGruppe, da es nicht zu jedem Element ein inverses Element gibt.Man kann endliche Gruppen (d.h. Gruppen mit endlich vielen Elementen)auch einfach durch ihre Verknupfungstabelle angeben. So ist beispielsweise(M, ∗) mit M = e, a und
* e ae e aa a e
eine Gruppe. Diese ist sogar eine abelsche Gruppe.
Bemerkung: Man nennt eine Gruppe (M,+) eine additive Gruppe. Ent-sprechend nennt man eine Gruppe (M, ·) eine multiplikative Gruppe.
Definition 2.25. Sei (M, ∗) eine algebraische Struktur.
• e ∈M heißt linksneutrales Element, falls ∀x ∈M : e ∗ x = x.
• e ∈M heißt rechtsneutrales Element, falls ∀x ∈M : x ∗ e = x.
Sei x ∈M .
• y ∈M heißt linksinverses Element von x, falls y ∗ x = e.
• y ∈M heißt rechtsinverses Element von x, falls x ∗ y = e.
Lemma 2.26. Sei (M, ∗) ist eine Gruppe. Dann gilt:
(i) Jedes linksneutrale Element ist gleich dem neutralen Element.
(ii) Jedes rechtsneutrale Element ist gleich dem neutralen Element.
(iii) Jedes linksinverse Element ist gleich dem inversen Element.
(iv) Jedes rechtsinverse Element ist gleich dem inversen Element.
Beweis: Wir zeigen (i) und (iii). Die Aussagen (ii) und (iv) folgen analog.
(i) Sei e ∈ M das neutrale Element und e1 ∈ M ein beliebiges linksneu-trales Element. Dann gilt (da e neutral und e1 linksneutral), dass
e1 = e1 ∗ e = e.
29

(iii) Sei y ∈M das inverse Element von x und y1 ein beliebiges linksinversesElement von x. Dann gilt
y1 = y1 ∗ e = y1 ∗ (x ∗ y) = (y1 ∗ x) ∗ y = e ∗ y = y.
2
Satz 2.27. Sei (M, ∗) eine algebraische Struktur. Dann sind folgende Bedin-gungen aquivalent:
(i) (M, ∗) ist eine Gruppe.
(ii) (M, ∗) ist eine Halbgruppe mit einem linksneutralen Element e und derEigenschaft, dass
∀x ∈M ∃ y ∈M : y ∗ x = e (linksinverses Element)
(iii) (M, ∗) ist eine Halbgruppe mit einem rechtsneutralen Element e undder Eigenschaft, dass
∀x ∈M ∃ y ∈M : x ∗ y = e (rechtsinverses Element)
Beweis: Wir zeigen, dass (i) ↔ (ii) gilt. Die Aquivalenz (i) ↔ (iii) folgtauf analoge Weise.(i)→ (ii) ist trivial nach Definition einer Gruppe.(ii) → (i) Es genugt zu zeigen, dass e auch ein rechtsneutrales Element istund dass zu jedem Element von M ein rechtsinverses Element existiert.
Sei x ∈M beliebig und y ∈M ein linksinverses Element von x. Sei außerdemz ein linksinverses Element von y. Dann erhalten wir
x = e ∗ x = (z ∗ y) ∗ x = z ∗ (y ∗ x) = z ∗ e
und somit
x ∗ e = (z ∗ e) ∗ e = z ∗ (e ∗ e) = z ∗ e = x,
d.h. e ist rechtsneutral. Außerdem folgt, dass
x ∗ y = (z ∗ e) ∗ y = z ∗ (e ∗ y) = z ∗ y = e,
d.h. das linksinverse Element y von x ist auch rechtinvers. 2
30

Satz 2.28. Sei (M, ∗) eine algebraische Struktur. Dann sind folgende Bedin-gungen aquivalent:
(i) (M, ∗) ist eine Gruppe.
(ii) (M, ∗) ist eine Halbgruppe und es existieren fur alle a, b ∈M Elementex, y ∈M , so dass
a ∗ x = b und y ∗ a = b.
Beweis: (i) → (ii) Seien a, b ∈ M gegeben. Dann gilt fur x := a−1 ∗ b undy := b ∗ a−1, dass
a ∗ x = a ∗ (a−1 ∗ b) = (a ∗ a−1) ∗ b = e ∗ b = b
undy ∗ a = (b ∗ a−1) ∗ a = b ∗ (a−1 ∗ a) = b ∗ e = b.
(ii) → (i) Nach Satz 2.27 genugt es zu zeigen, dass die Halbgruppe einlinksneutrales Element und fur alle x ∈M ein linksinverses Element besitzt.Sei a ∈ M fest. Dann existiert ein e ∈ M , so dass e ∗ a = a. Sei nun z ∈ Mbeliebig. Dann existiert ein x ∈M , so dass a ∗ x = z. Damit gilt
e ∗ z = e ∗ (a ∗ x) = (e ∗ a) ∗ x = a ∗ x = z
fur alle z ∈ M , d.h. e ist linksneutrales Element. Die Existenz eines links-inversen Elementes fur x ∈ M folgt unmittelbar aus der Voraussetzung mita := x und b := e. 2
Wir wollen nun noch eine spezielle abelsche Gruppe betrachten, die in derZahlentheorie eine große Rolle spielt: die zyklische Gruppe Z/nZ mit n ∈ N.Diese ist wie folgt definiert:
M := [r] | r ∈ Z,
wobei [r] := z ∈ Z | ∃k ∈ Z : z = r + k · n. Offenbar gehoren zu [r] alleZahlen z ∈ Z, fur die z− r durch n teilbar ist. Fur jedes r ∈ Z ist die Menge[r] eine Aquivalenzklasse zur Aquivalenzrelation ∼, definiert durch
x ∼ yDef⇔ n ist ein Teiler von x− y.
Damit wird klar, dass
M = [0], [1], ..., [n− 1],
31

wobei fur r ∈ 0, 1, 2, ..., n − 1 die Aquivalenzklasse [r] die Menge allerganzen Zahlen ist, die bei Division durch n den Rest r lassen. Man bezeichnetdie Mengen [r] daher als Restklassen und den Reprasentanten r als Rest. DieVerknupfung ∗ wird mit + bezeichnet und ist definiert als
∀x, y ∈ Z : [x] + [y] := [x+ y].
Damit diese Definition wohldefiniert ist, mussen wir zeigen, dass sie un-abhangig von der Wahl der Reprasentanten ist, d.h. ∀x1, x2, y1, y2 ∈ Z :
Wenn [x1] = [x2] und [y1] = [y2], dann [x1 + y1] = [x2 + y2].
Seien x1, x2, y1, y2 ∈ Z mit [x1] = [x2] und [y1] = [y2]. Dann existieren k, ` ∈Z, so dass
x1 − x2 = k · n und y1 − y2 = ` · n.Somit erhalten wir
(x1 + y1)− (x2 + y2) = (x1 − x2) + (y1 − y2) = k · n− ` · n = (k − `) · n,
d.h. [x1 + y1] = [x2 + y2].
Zur Veranschaulichung der Verknupfung + in Z/nZ geben wir hier die Ver-knupfungstabelle von Z/4Z an:
+ [0] [1] [2] [3]
[0] [0] [1] [2] [3][1] [1] [2] [3] [0][2] [2] [3] [0] [1][3] [3] [0] [1] [2]
Definition 2.29. Sei (M, ∗) eine Gruppe. (N, ∗) heißt Untergruppe von(M, ∗), falls N ⊆ M und (N, ∗) eine Gruppe mit der Verknupfung ∗ vonM ist.
Satz 2.30. Sei (M, ∗) eine Gruppe und N ⊆M . Dann sind folgende Bedin-gungen aquivalent.
(i) (N, ∗) ist eine Untergruppe von (M, ∗).
(ii) ∀x, y ∈ N : x ∗ y−1 ∈ N .
Beweis: Fur N = ∅ ist die Behauptung sofort klar. Sei nun N 6= ∅.
32

(i)→ (ii) Seien x, y ∈ N . Dann ist auch y−1 ∈ N und somit x ∗ y−1 ∈ N .
(ii)→ (i) Die Assoziativitat ist klar, da ∗ auf M assoziativ ist. Wir mussennoch zeigen, dass
(a) ∀x, y ∈ N : x ∗ y ∈ N(b) e ∈ N(c) ∀x ∈ N : x−1 ∈ N
zu (b): Fur x = e und y = e erhalten wir e = e ∗ e−1 ∈ N .
zu (c): Sei y ∈ N . Dann gilt mit (b) und x = e auch y−1 = e∗y−1 ∈ N .
zu (a): Seien x, y ∈ N . Dann gilt mit (c) auch x∗y = x∗(y−1)−1 ∈ N .
2
Definition 2.31. Sei (M, ∗) eine Gruppe und L ⊆M . Dann heißt (H(L), ∗)die von L erzeugte Untergruppe von (M, ∗), falls
H(L) =⋂
L⊆N⊆M(N,∗) Untergruppe von (M,∗)
N.
Satz 2.32. Sei (M, ∗) eine Gruppe und L ⊆M . Dann gilt:
(i) (H(L), ∗) ist eine Untergruppe von (M, ∗).
(ii) L ⊆ H(L)
(iii) Falls L1 ⊆ L2 ⊆M , dann gilt H(L1) ⊆ H(L2).
(iv) (H(L), ∗) ist die kleinste Untergruppe (N, ∗) von (M, ∗) mit L ⊆ N .
Beweis:
(i) Ubungsaufgabe
(ii) Sei x ∈ L beliebig. Dann gilt fur alle N mit L ⊆ N auch x ∈ Nund somit liegt x auch im Durchschnitt aller N , fur die (N, ∗) eineUntergruppe von (M, ∗) ist, d.h. x ∈ H(L).
(iii) Sei L1 ⊆ L2 ⊆ M . Dann gilt fur jede Untergruppe (N, ∗) von (M, ∗)mit L2 ⊆ N auch L1 ⊆ N . Somit folgt
H(L1) =⋂
L1⊆N⊆M(N,∗) Untergruppe von (M,∗)
N ⊆⋂
L2⊆N⊆M(N,∗) Untergruppe von (M,∗)
N = H(L2).
33

(iv) Sei (N , ∗) die kleinste Untergruppe von (M, ∗) mit L ⊆ N .
Wir zeigen zuerst, dass H(L) ⊆ N . Sei dazu x ∈ H(L) beliebig. NachDefinition von H(L) liegt x im Durchschnitt aller Untergruppen von(M, ∗) mit L ⊆ N und gehort somit auch zur kleinsten Untergruppe(N , ∗).Nun zeigen wir noch, dass N ⊆ H(L). Sei x ∈ N und (N, ∗) einebeliebige Untergruppe von (M, ∗) mit L ⊆ N . Da (N , ∗) die kleinsteUntergruppe von (M, ∗) ist, so gilt N ⊆ N und somit x ∈ N . Da Nbeliebig war, so gehort x zu allen Untergruppen (N, ∗) mit L ⊆ N , d.h.x ∈ H(L).
2
Beispiele: Sei (M, ∗) = (Q,+). Dann gilt (H(1),+) = (Z,+). Es gilt auch(H(1, 2),+) = (Z,+), aber mit (H(2),+) erhalt man nur die geradenganzen Zahlen.
Definition 2.33. Sei (M, ∗) ein Gruppe. Eine Menge L heißt Erzeugenden-system von M , falls M = H(L).
2.4 Ringe und Korper
Definition 2.34. Ein Tripel (R,+, ·) heißt Ring, falls + und · Verknupfungenauf R sind und folgende drei Eigenschaften erfullt sind.
(i) (R,+) ist eine abelsche Gruppe.
(ii) (R, ·) ist eine Halbgruppe.
(iii) Es gelten die Distributivgesetze: Fur alle a, b, c ∈ R gilt:
(a+ b) · c = a · c+ b · c ∧ c · (a+ b) = c · a+ c · b.
Ein Ring (R,+, ·) heißt kommutativ, falls (R, ·) eine kommutative Halb-gruppe ist.
Ein Ring (R,+, ·) heißt Ring mit Einselement 1, falls (R, ·) ein Monoidmit dem neutralen Element 1 ist.
Das neutrale Element von (R,+) wird Nullelement (0) genannt.
Beispiele: Folgende Tripel sind Ringe:
• (Z,+, ·), (Q,+, ·), (R,+, ·) (mit Einselement 1)
34

• (R,+, ·) mit R = 0 und 0 + 0 = 0 und 0 · 0 = 0 (mit Einselement =Nullelement = 0)
• (R,+, ·), wobei (R,+) eine abelsche Gruppe ist und fur alle x, y ∈ Rgilt: x · y = 0 (ohne Einselement, falls R mindestens zwei verschiedeneElemente besitzt)
• (R,+, ·), wobei R = f : R→ R und fur alle x ∈ R
(f + g)(x) := f(x) + g(x) ∧ (f · g)(x) := f(x) · g(x)
(mit Einselement f1 ≡ 1, d.h. ∀x ∈ R: f1(x) = 1)
• (R,+, ·), wobei R = Z/nZ und fur alle [r], [s] ∈ R:
[r] + [s] = [r + s] ∧ [r] · [s] = [r · s]
(mit Einselement [1])
All diese Ringe sind auch kommutative Ringe. Es gibt aber auch nicht-kommutative Ringe, z.B. (Z× Z,+, ·) mit
(a1, a2) + (b1, b2) := (a1 + b1, a2 + b2)
(a1, a2) · (b1, b2) := (a1 · b1, a1 · b2).
In diesem Ring gilt (1, 0) · (1, 1) = (1, 1), aber (1, 1) · (1, 0) = (1, 0).
Bemerkung: Sei (R,+, ·) ein Ring und 0 das Nullelement. Dann gilt furalle a ∈ R, dass
a · 0 = 0 · a = 0.
Beweis: Sei x := a · 0. Es gilt nach dem Distributivgesetz, dass
x = a · 0 = a · (0 + 0) = a · 0 + a · 0 = x+ x.
Sei −x das zu x inverse Element bezuglich der Verknupfung +. Dann gilt
x+ (−x) = x+ x+ (−x), d.h. 0 = x+ 0 = x,
also a · 0 = x = 0. Analog zeigt man, dass 0 · a = 0 gilt. 2
Darauf aufbauend kann man leicht folgende Rechenregeln beweisen.
Satz 2.35. Sei (R,+, ·) ein Ring. Dann gilt fur alle a, b ∈ R und fur allem,n ∈ Z, dass
35

(i) a · (−b) = (−a) · b = −(a · b)
(ii) (−a) · (−b) = a · b
(iii) (m+Z n) ∗ a = m ∗ a+ n ∗ a, wobei
m ∗ a :=
a+ a+ ...+ a︸ ︷︷ ︸m−mal
, falls m > 0
0, falls m = 0
−(a+ a+ ...+ a︸ ︷︷ ︸)(−m)−mal
, falls m < 0
(iv) m ∗ (a+ b) = m ∗ a+m ∗ b
(v) (m ·Z n) ∗ a = m ∗ (n ∗ a)
Definition 2.36. Sei (R,+, ·) ein Ring. Dann heißt a ∈ R Nullteiler, fallsa 6= 0 und ein b ∈ R mit b 6= 0 existiert, so dass b · a = 0.Der Ring heißt nullteilerfrei, falls es keine Nullteiler in R gibt.
Bemerkung: Ein Ring (R,+, ·) ist genau dann nullteilerfrei, wenn aus a·b =0 mit a, b ∈ R folgt, dass a = 0 oder b = 0.
Beispiele:
• Die Ringe (Z,+, ·), (Q,+, ·) und (R,+, ·) sind nullteilerfrei.
• Der Ring (Z/4Z,+, ·) hat den Nullteiler [2], denn [2] · [2] = [4] = [0].
• Der Ring (Z/nZ,+, ·) ist fur n ∈ N genau dann nullteilerfrei, wenn neine Primzahl ist.
Begrundung: Falls n keine Primzahl ist, dann existieren naturliche Zah-len a und b mit 1 < a < n und 1 < b < n, so dass n = a · b. Dahergilt [a] · [b] = [n] = [0], d.h. [a] und [b] sind Nullteiler von (Z/nZ,+, ·).Falls n eine Primzahl ist und fur [a], [b] ∈ Z/nZ gilt [a] · [b] = [0], dannhaben wir [a ·b] = [0], d.h. ∃k ∈ N : a ·b = k ·n. Da n eine Primzahl ist,so ist n ein Teiler von a oder ein Teiler von b, d.h. [a] = 0 oder [b] = 0.
Definition 2.37. (K,+, ·) heißt Korper, falls folgende Eigenschaften erfulltsind.
(i) (K,+) ist eine abelsche Gruppe.
36

(ii) (K\0, ·) ist eine abelsche Gruppe, wobei 0 das neutrale Element von(K,+) ist.
(iii) Es gelten die Distributivgesetze.
Bemerkung: Wenn (K,+, ·) ein Korper und klar ist, was mit Addition undMultiplikation gemeint ist, dann sagt man auch einfach, dass K ein Korperist.
Beispiele:
• (Q,+, ·) und (R,+, ·) sind Korper.
• (Z/nZ,+, ·) ist genau dann ein Korper, falls n eine Primzahl ist.
• (C,+, ·) ist ein Korper mit der Addition, definiert durch
∀a1, a2, b1, b2 ∈ R : (a1 + b1i) + (a2 + b2i) := (a1 + a2) + (b1 + b2)i
und der Multiplikation, definiert durch
∀a1, a2, b1, b2 ∈ R : (a1+b1i)·(a2+b2i) := (a1·a2−b1·b2)+(a1·b2+b1·a2)i.
Bemerkung:
1. Sei a ∈ R. Dann identifiziert man jede komplexe Zahl der Form a+ 0imit der reellen Zahl a, d.h. a+ 0i = a. Somit ist R ⊆ C.
2. Sei b ∈ R. Dann nennt man jede komplexe Zahl der Form 0 + bi reinimaginar und schreibt kurz bi, d.h. 0 + bi = bi.
3. Aufgrund der Definition der Multiplikation erhalten wir
i2 = i · i = (0 + 1i) · (0 + 1i)
= (0 · 0− 1 · 1) + (0 · 1 + 1 · 0) = −1 + 0i = −1.
4. Die Multiplikation lasst sich leicht wie folgt merken: Man merke sichi2 = −1 und nutze die Distributivgesetze. Beispiel:
(3 + 2i) · (5 + 6i) = 3 · 5 + 3 · 6i+ 2i · 5 + 2i · 6i= 15 + 18i+ 10i− 12 = 3 + 28i
37

5. Fur z = a + bi ∈ C mit a, b ∈ R hat z := a − bi folgende schoneEigenschaften:
z + z = 2a ∈ R ∧ z · z = a2 + b2 ∈ R,
denn z + z = (a+ bi) + (a− bi) = (a+ a) + (b− b)i = 2a und
z · z = (a+ bi) · (a− bi)= (a2 − b2 · (−1)) + (ab− ba)i = a2 + b2.
Man nennt z die zu z konjugiert komplexe Zahl.
Definition 2.38. Die Charakteristik eines Korpers (K,+, ·) ist definiert als
char(K) =
0, falls n ∗ 1 6= 0 ∀n ∈ N\0minn ∈ N\0 | n ∗ 1 = 0, sonst.
Mit n ∗ 1 ist die n-fache Addition der Eins gemeint, d.h.
n ∗ 1 =
1 + 1 + ...+ 1︸ ︷︷ ︸n−mal
, falls n > 0
0, falls n = 0.
Beispiel: Q, R und C haben die Charakteristik 0. Z/pZ hat die Charakte-ristik p, falls p eine Primzahl ist.
Ein wichtiger Ring ist der sogenannte Polynomring (K[x],+, ·) uber KorpernK. Dazu sei ein Korper K und eine formale Variable x gegeben. Dann heißtf ein Polynom mit Koeffizienten aus K, falls
f [x] = a0 + a1x+ a2x2 + ...+ anx
n mit a0, a1, ..., an ∈ K.
Falls alle Koeffizienten gleich Null sind, so spricht man vom Nullpolynomund schreibt f = 0.
Der Grad eines Polynoms deg(f) ist definiert als
deg(f) =
−∞, falls f = 0
maxk ∈ N| ak 6= 0, sonst.
Die Menge aller solchen Polynome bezeichnen wir mit K[x].
(K[x],+, ·) ist ein Ring mit folgender Addition und Multiplikation:
38

Fur f [x] = a0 +a1x+ ...+anxn ∈ K[x] und g[x] = b0 +b1x+ ...+bmx
m ∈ K[x]sei
(f + g)[x] := (a0 + b0) + (a1 + b1)x+ ...+ (ak + bk)xk,
wobei k := maxm,n und an+1 = ... = am = 0 im Falle n < m sowiebm+1 = ... = bn = 0 im Falle n > m. Zudem definieren wir
(f · g)[x] = c0 + c1x+ ...+ c`x`,
wobei ` = m+ n und
∀ k ∈ 0, 1, ..., ` : ck :=∑
(i,j)∈Ik
ai · bj
mit Ik := (i, j) ∈ N | 0 ≤ i ≤ n ∧ 0 ≤ j ≤ m ∧ i+ j = k.
Beispiel: Sei K := R, f(x) := 1 + 2x+ 3x2 und g(x) := 4 + 5x. Dann gilt
f [x] + g[x] = (1 + 2x+ 3x2) + (4 + 5x) = 5 + 7x+ 3x2
und
f [x] · g[x] = (1 + 2x+ 3x2) · (4 + 5x) = 4 + 13x+ 22x2 + 15x3
Definition 2.39. Sei (K,+, ·) ein Korper. Dann heißt G ein Unterkorpervon K, falls G ⊆ K und folgende Eigenschaften gelten:
(i) ∀a, b ∈ G : a+ b ∈ G (Abgeschlossenheit der Addition)
(ii) ∀a, b ∈ G : a · b ∈ G (Abgeschlossenheit der Multiplikation)
(iii) 1 ∈ G, wobei 1 das Einselement von K ist.
(iv) ∀a ∈ G : −a ∈ G, wobei −a das inverse Element von a bezuglich derAddition ist.
(v) ∀a ∈ G\0 : a−1 ∈ G, wobei a−1 das inverse Element von a bezuglichder Multiplikation ist.
Beispiel: R ist ein Unterkorper von C.
39

2.5 Vektorraume
Einer der zentralen Begriffe der linearen Algebra ist der Begriff des Vektor-raums. Wir geben hier zunachst die abstrakte Definition eines Vektorraumsan. Im Laufe der Vorlesung werden wir eine ganze Reihe von Beispielen furVektorraume kennenlernen und spater auch erkennen, wie diese Definitionmit der geometrischen Anschauung (Raum von Vektoren) zusammenhangt.
Definition 2.40. Sei (K,+K , ·K) ein Korper und (V,+V ) eine abelsche Grup-pe. Dann heißt das Tripel (K,V, ·) ein Vektorraum, falls
(i) die Multiplikation · eine Abbildung von K × V nach V definiert, d.h.∀ a ∈ K ∀ v ∈ V : a · v ∈ V , wobei a · v eindeutig definiert ist.
(ii) die Multiplikation · erfullt folgende Eigenschaften:∀ a, b ∈ K ∀ v, w ∈ V :
(V1) 1 · v = v, wobei 1 das Einselement des Korpers K ist.
(V2) (a+K b) · v = a · v +V b · v(V3) a · (v +V w) = a · v +V a · w(V4) (a ·K b) · v = a · (b · v)
Die Elemente aus K nennen wir Skalare. Die Elemente von V nennen wirVektoren. Die Multiplikation · bezeichnet man als skalare Multiplikationoder Multiplikation mit einem Skalar.Wenn klar ist, was mit der skalaren Multiplikation gemeint ist, dann sagtman auch einfach, dass V ein K-Vektorraum ist.Wenn klar ist, welcher Korper K und was mit der skalaren Multiplikationgemeint ist, dann sagt man einfach nur, dass V ein Vektorraum ist.
Beispiele: Sei K ein Korper.
1. (K,V, ·) mit V = K ist stets ein K-Vektorraum.
2. (K,V, ·) mit V = Kn = K ×K × ...×K︸ ︷︷ ︸n−mal
ist ein K-Vektorraum. Die
Addition von zwei Vektoren v, w aus Kn ist dabei definiert als
(v1, v2, ..., vn) + (w1, w2, ..., wn) := (v1 + w1, v2 + w2, ..., vn + wn).
Die Multiplikation mit einem Skalar a ∈ K ist definiert als
a · (v1, v2, ..., vn) := (a ·K v1, a ·K v2, ..., a ·K vn).
40

3. Q, R, C, Qn, Rn, Cn sind somit Vektorraume.
4. (K,K[x], ·) mit dem Polynomring K[x] und der skalaren Multiplikation
c · (a0 + a1x+ ...+ anxn) = (c ·K a0) + (c ·K a1)x+ ...+ (c ·K an)xn
fur c ∈ K ist ein K-Vektorraum.
Es gelten folgende Rechenregeln in einem Vektorraum.
Satz 2.41. Sei (K,V, ·) ein Vektorraum. Sei 0 das Nullelement von K undO der Nullvektor, d.h. das neutrale Element von (V,+V ). Dann gilt fur allea ∈ K und v ∈ V , dass
(i) a · O = O
(ii) 0 · v = O
(iii) Falls a · v = O, dann gilt a = 0 oder v = O.
(iv) (−1) ·v = −v, wobei −v das zu v inverse Element bzgl. +V und −1 daszu 1 inverse Element bzgl. +K.
Beweis: Sei a ∈ K und v ∈ V .
(i) Fur w := a · O gilt
w = a · O = a · (O +V O)(V 3)= a · O +V a · O = w +V w
und somit
O = w +V (−w) = w +V w +V (−w) = w +V O = w.
(ii) Fur w := 0 · v gilt
w = 0 · v = (0 +K 0) · v (V 2)= 0 · v +V 0 · v = w +V w
und damit auch wieder O = w.
(iii) Sei a · v = O. Falls a 6= 0, dann existiert ein a−1 ∈ K, so dass
v(V 1)= 1 · v = (a−1 ·K a) · v (V 4)
= a−1 · (a · v) = a−1 · O (i)= O.
41

(iv) Es gilt
v +V (−1) · v (V 1)= 1 · v +V (−1) · v (V 2)
= (1 +K (−1)) · v = 0 · v (ii)= O.
Damit ist nachgewiesen, dass (−1) · v = −v. 2
Definition 2.42. Sei (K,V, ·) ein Vektorraum und W ⊆ V mit W 6= ∅. Dannheißt (K,W, ·) ein Untervektorraum oder Unterraum von (K,V, ·), falls
(i) ∀v, w ∈ W : v +V w ∈ W .
(ii) ∀a ∈ K ∀v ∈ W : a · v ∈ W .
Bemerkung: Wenn klar ist, was die skalare Multiplikation ist, dann sagtman auch kurz K-Unterraum. Wenn zudem klar ist, welcher Korper K ge-meint ist, dann spricht mach auch einfach vom Unterraum.
Satz 2.43. Sei (K,V, ·) ein Vektorraum und (K,W, ·) ein Untervektorraumvon (K,V, ·). Dann ist (K,W, ·) selbst wieder ein Vektorraum.
Beweis:
1. (W,+) ist Untergruppe von (V,+):Nach dem Satz 2.30 fur Untergruppen brauchen wir nur zu zeigen, dassv+(−w) ∈ W fur alle v, w ∈ W . Seien nun v, w ∈ W . Dann haben wir,dass −w = (−1) · w ∈ W wegen (ii) und somit auch v + (−w) ∈ Wwegen (i).
2. ∀a ∈ K ∀v ∈ W : a · v ∈ W wegen (ii).
3. Die Eigenschaften (V 1)− (V 4) sind erfullt fur alle a, b ∈ K und v, w ∈W , da W ⊆ V und (K,V, ·) ein Vektorraum ist.
2
Beispiele:
1. W = w = (0, a2, a3, ..., an) | a2, ..., an ∈ K, wobei K ein Korper ist,ist ein K-Unterraum von Kn.
2. Der Durchschnitt W1 ∩ W2 zweier K-Unterraume ist wieder ein K-Unterraum. Dies gilt auch, wenn wir den Durchschnitt beliebig vielerUnterraume betrachten.
42

3. Die Vereinigung W1∪W2 zweier K-Unterraume ist im allgemeinen keinK-Unterraum. Als Beispiel betrachte man die R-Unterraume
W1 = (a1, 0) | a1 ∈ R und W2 = (0, a2) | a2 ∈ R des R2.
Falls a1 6= 0 und a2 6= 0, so gilt (a1, 0) + (0, a2) = (a1, a2) /∈ W1 ∪W2.
4. Die SummeW1+W2 zweierK-Unterraume ist wieder einK-Unterraum.Sie ist definiert als
W1 +W2 = w = w1 + w2 | w1 ∈ W1 ∧ w2 ∈ W2.
Man spricht von einer direkten Summe W1 ⊕W2, falls zudem nochgilt, dass W1 ∩W2 = O, wobei O der Nullvektor von V ist. Betrachtenwir wieder die R-Unterraume
W1 = (a1, 0) | a1 ∈ R und W2 = (0, a2) | a2 ∈ R des R2.
Dann gilt W1 ⊕W2 = R2.
5. Die Menge aller Polynome mit Koeffizienten in R bildet einen Unter-raum von dem Vektorraum V aller Funktionen/Abbildungen von Rnach R mit der Addition
(f + g)(x) = f(x) + g(x) ∀x ∈ R
und der skalaren Multiplikation
(c · f)(x) = c · f(x) ∀ c ∈ R ∀x ∈ R.
2.6 Linearkombinationen, lineare Unabhangigkeit, Er-zeugendensystem
Wir kommen nun zu einem Konzept, mit dem wir aus Teilmengen geeigneteUnterraume erzeugen konnen.
Zur Verkurzung der Schreibweise ist im folgenden mit dem Symbol + ineinem Vektorraum (K,V, ·) stets die Addition +V in V gemeint.
Definition 2.44. Sei (K,V, ·) ein Vektorraum und seien v1, v2, ..., vn Vek-toren aus V . Dann heißt v eine Linearkombination der Vektoren v1, v2,..., vn, falls es Skalare a1, a2, ..., an ∈ K gibt, so dass
v = a1 · v1 + a2 · v2 + ...+ an · vn.
43

Beispiel: Seien v1 = (1, 0, 2) und (1, 3, 3) Vektoren im R3. Dann ist v =(1, 6, 4) eine Linearkombination von v1 und v2, da
v = (−1) · (1, 0, 2) + 2 · (1, 3, 3) = (−1, 0,−2) + (2, 6, 6) = (1, 6, 4).
Satz 2.45. Sei V ein Vektorraum und U ⊆ V mit U 6= ∅. Dann bildet dieMenge aller endlichen Linearkombinationen
L(U) := v =n∑i=1
ai · ui | ai ∈ K, ui ∈ U
einen Unterraum von V .
In der Literatur findet man anstelle der Schreibweise L(U) auch span(U).Man meint damit, dass der Raum span(U) von den Vektoren aus U aufge-spannt wird.
Bemerkung 2.46. Da u = 1 ·u ∈ U fur alle Vektoren u ∈ U , so wissen wir,dass U ⊆ L(U).
Beweis: (von Satz 2.45) Da V ein Vektorraum ist, so gehoren alle Vektorenvi := ai ·ui mit ai ∈ K und ui ∈ V wieder zu V und damit gehort auch derenSumme
v =n∑i=1
vi =n∑i=1
ai · ui
wieder zu V . Somit gilt L(U) ⊆ V . Da U 6= ∅, so ist auch L(U) 6= ∅. Esbleibt zu zeigen, dass
(i) ∀v, w ∈ L(U) : v + w ∈ L(U).
(ii) ∀c ∈ K ∀v ∈ L(U) : c · v ∈ L(U).
(i) Seien v, w ∈ L(U). Dann gilt
v =n∑i=1
ai · vi und w =m∑j=1
bj · wj,
wobei ai, bj ∈ K und vi, wj ∈ U fur alle i = 1, .., n und j = 1, ...,m.Somit haben wir
v + w =n∑i=1
ai · vi +m∑j=1
bj · wj =n+m∑k=1
ck · uk ∈ L(U),
wobei ck = ak und uk = vk fur alle 1 ≤ k ≤ n sowie cn+k = bk unduk+n = wk fur alle 1 ≤ k ≤ m.
44

(ii) Seien c ∈ K und v ∈ L(U). Dann gilt
v =n∑i=1
ai · ui mit ai ∈ K
und weiter
c · v = cn∑i=1
ai · ui(V 2)=
n∑i=1
c · (ai · ui)(V 4)=
n∑i=1
(c ·K ai) · ui ∈ V,
da c ·K ai ∈ K fur alle i = 1, ..., n.
2
Beispiel: Sei V = R3 und U1 = (1, 0, 0), (0, 1, 0). Dann gilt
L(U1) = (a1, a2, 0) | a1, a2 ∈ R.
Es gilt ubrigens auch
L(U2) = (a1, a2, 0) | a1, a2 ∈ R.
fur U2 := (1, 1, 0), (0, 1, 0).
Bemerkung 2.47. Sei V ein Vektorraum und U ⊆ V mit U 6= ∅. Dann istL(U) der kleinste Unterraum W von V mit U ⊆ W .
Definition 2.48. Sei V ein Vektorraum und U ⊆ V . Falls, V = L(U), soheißt U ein Erzeugendensystem von V .
Beispiele:
1. R2 = L((1, 0), (0, 1), R3 = L((1, 0, 0), (0, 1, 0), (0, 0, 1)
2. V = Kn und U = e1, e2, ..., en, wobei
ei = (0, ..., 0, 1i, 0, ..., 0)
fur alle i = 1, ..., n. Dabei ist 0 das Nullelement von K und 1 dasEinselement von K. Die Vektoren ei nennt man Einheitsvektoren.
3. Falls V ein Vektorraum ist, dann ist V = L(V ).
4. Falls U1 ein Erzeugendensystem von V ist und U1 ⊆ U2 ⊆ V , dann istU2 auch ein Erzeugendensystem von V .
45

Definition 2.49. Sei V ein Vektorraum und U = u1, ..., un ⊆ V . DieTeilmenge U heißt linear unabhangig, falls aus
n∑i=1
ai · ui = O, ai ∈ K
folgt, dass ai = 0 fur alle i = 1, ..., n. Andernfalls heißt sie linear abhangig.
Eine unendliche Menge U = ui ∈ V |i ∈ I von Vektoren aus V heißtlinear unabhangig, falls jede endliche Teilmenge von U linear unabhangig ist.Andernfalls heißt sie linear abhangig.
Beispiele:
1. V = R3 und U = (1, 2, 1), (1, 0, 1). Sei
a1 · (1, 2, 1) + a2 · (1, 1, 0) = O = (0, 0, 0).
Dann gilt a1 + a2 = 0, 2a1 + a2 = 0 und a1 = 0, also auch a2 = 0. Alsoist U linear unabhangig.
2. V = Kn und U = e1, e2, ..., en. Falls
n∑i=1
ai · ei = O,
so gilt
(a1, a2, ..., an) =n∑i=1
ai · (0, ..., 0, 1i, 0, ..., 0) = (0, 0, ..., 0)
und somit ai = 0 fur alle i = 1, ..., n, d.h. U ist linear unabhangig.
Satz 2.50. Sei V ein Vektorraum und U = ui ∈ V |i ∈ I. Dann ist Ulinear unabhangig genau dann, wenn sich jeder Vektor w ∈ L(U) eindeutigals eine Linearkombination von Vektoren aus U darstellen lasst.
Beweis: (→) U ist linear unabhangig. Sei w ∈ L(U) beliebig. Wir nehmenan, dass ∑
i∈I0
ai · ui = w =∑i∈I0
bi · ui, ai, bi ∈ K,
wobei I0 ⊆ I endlich ist. Dann gilt∑i∈I0
(ai − bi) · ui = O.
46

Da U linear unabhangig ist, so gilt ai − bi = 0 fur alle i ∈ I0, d.h. ai = bi furalle i ∈ I0.
(←) Jeder Vektor w ∈ L(U) lasst sich eindeutig als eine Linearkombinationvon Vektoren aus U darstellen. Wir nehmen an, dass∑
i∈I0
ai · ui = O, ai ∈ K,
wobei I0 ⊆ I endlich ist. Dann gilt∑i∈I0
ai · ui = O =∑i∈I0
0 · ui.
Da die Darstellung von O eindeutig ist, so haben wir ai = 0 fur alle i ∈ I0. 2
Wir schauen uns noch einmal die Summe W1 +W2 zweier Unterraume einesVektorraums V an. Sie war definiert als
W1 +W2 = w = w1 + w2 | w1 ∈ W1 ∧ w2 ∈ W2.
Ist die Darstellung w = w1 + w2 eindeutig? Nein, i.a. nicht, denn z.B. fur
V = R3, W1 = (a, b, 0) | a, b ∈ R, W2 = (0, b, c) | b, c ∈ R
gilt(1, 0, 0) + (0, 0, 1) = (1, 0, 1) = (1, 1, 0) + (0,−1, 1).
Doch sie ist eindeutig, falls W1 ∩W2 = O.
Satz 2.51. Seien W1 und W2 Unterraume von V . Die Summendarstellungvon Vektoren aus W1 +W2 ist genau dann eindeutig, wenn W1 ∩W2 = O.
Beweis: (→) Die Summendarstellung ist eindeutig. Wir mussen zeigen, dassW1∩W2 = O. Wir nehmen an, dass es einen Vektor w 6= O mit w ∈ W1∩W2
gibt. Dann gilt w ∈ W1 und w ∈ W2 sowie −w ∈ W2. Damit haben wir
w + (−w) = O = O + O,
d.h. die Summendarstellung ware nicht eindeutig. Widerspruch zur Annah-me.(←) Es gilt W1∩W2 = O. Wir mussen zeigen, dass die Summendarstellungeindeutig ist. Wir nehmen an, dass ein w ∈ W1 +W2 existiert, so dass
w1 + w2 = w = v1 + v2, w1, v1 ∈ W1, w2, v2 ∈ W2.
47

Dann giltw1 + (−v1) = w2 + (−v2) ∈ W1 ∩W2
und somitw1 + (−v1) = w2 + (−v2) = O
Dies bedeutet, dass w1 = v1 und w2 = v2, d.h. die Darstellung von w isteindeutig. 2
Lemma 2.52. Sei V ein K-Vektorraum. Dann gilt
(i) Sei v ∈ V . Dann ist U = v linear abhangig genau dann, wenn v = O.
(ii) Falls O ∈ U ⊆ V . Dann ist U linear abhangig.
(iii) Falls U ⊆ W ⊆ V und U linear abhangig. Dann ist auch W linearabhangig.
(iv) Falls zu U ⊆ V zwei Vektoren v1 und v2 gehoren, fur die v1 = v2 gilt,so ist U linear abhangig.
(v) Sei U = u1, ..., un und n ≥ 2. Dann ist U genau dann linear abhangig,wenn es ein i ∈ 1, ..., n gibt, so dass ui eine Linearkombination derVektoren von U\ui ist.
Beweis:
(i) Sei U = v linear abhangig. Dann existiert ein a ∈ K mit a 6= 0, sodass a · v = O. Dann gilt
a−1 · a · v = a−1 · O = O,
d.h. v = 1 · v = O. Umgekehrt, falls v = O, dann gilt 1 · v = O, d.h.U = v ist linear abhangig.
(ii) Sei O ∈ U ⊆ V . Dann gilt 1 · u = O fur u := O ∈ U , d.h. die endlicheTeilmenge u von U ist linear abhangig und somit ist auch U linearabhangig.
(iii) Da U linear abhangig ist, so existieren u1,..., un ∈ U und a1, ..., an ∈ Kmit
∑ni=1 ai · ui = 0, wobei mindestens ein ai 6= 0. Da U ⊆ W , so gilt
u1,..., un ∈ W mit∑n
i=1 ai · ui = 0, wobei mindestens ein ai 6= 0. D.h.W ist linear abhangig.
48

(iv) Seien v1, v2 ∈ U mit v1 = v2. Dann gilt
1 · v1 + (−1) · v2 = v1 + (−v2) = O,
d.h. U ist linear abhangig.
(v) Sei n ≥ 2 und U = u1, ..., un linear abhangig. Dann existierena1, ..., an ∈ K, von denen mindestens ein Element ungleich 0 ist, sodass
a1 · u1 + ...+ an · un = O.
Sei ai 6= 0. Dann gilt
a−1i · a1 · u1 + ...+ a−1
i · ai · ui + ...+ a−1i · an · un = O.
Somit haben wir
ui =n∑j=1j 6=i
(−a−1i · aj)︸ ︷︷ ︸∈K
· uj,
d.h. ui ist eine Linearkombination der Vektoren von U\ui. Sei nunumgekehrt ui eine Linearkombination der Vektoren von U\ui. Dannfinden wir Koeffizienten cj ∈ K, so dass
ui =n∑j=1j 6=i
cj · uj,
Dann giltn∑j=1
cj · uj = 0,
wobei cj = −1. Da 1 6= 0 ist, so ist auch −1 6= 0 und somit ist U linearabhangig.
2
2.7 Basis
Definition 2.53. Sei V ein K-Vektorraum. Dann heißt U ⊆ V eine Basisvon V , falls U ein Erzeugendensystem von V und linear unabhangig ist.
Beispiele:
49

1. (1, 0), (0, 1) ist eine Basis von R2.(1, 3), (2, 4) ist auch eine Basis von R2.(1, 0, 0), (2, 1, 0), (3, 4, 1) ist eine Basis von R3.
2. e1, e2, .., en ist eine Basis von Kn.
3. 1, x, x2, ..., xi, ... ist eine Basis von K[x] (Vektorraum aller Polynomemit Koeffizienten aus K).
Satz 2.54. Sei V ein Vektorraum, V 6= O und U ⊆ V . Dann sind folgendeBedingungen aquivalent.
(i) U ist eine Basis von V .
(ii) U ist ein minimales Erzeugendensystem von V , d.h. sobald man irgend-ein Element von U streicht, dann ist die resultierende Teilmenge keinErzeugendensystem von V mehr.
(iii) U ist eine maximale linear unabhangige Teilmenge von V , d.h. sobaldman irgendein Element von V zu U hinzunimmt, ist die resultierendeTeilmenge nicht mehr linear unabhangig.
Beweis:
(i) → (ii) Da U eine Basis von V ist, ist U nach Definition auch einErzeugendensystem von V .Minimalitat: Sei u∗ ∈ U beliebig. Es ist zu zeigen, dass U∗ := U\u∗kein Erzeugendensystem von V ist. Dazu zeigen wir, dass u∗ /∈ L(U∗).Angenommen, u∗ ∈ L(U∗). Dann ware u∗ eine Linearkombination vonU\u∗. Nach Lemma 2.52. (v) ware U linear abhangig. Dies ist einWiderspruch dazu, dass U eine Basis ist.
(ii) → (i) Es ist zu zeigen, dass U linear unabhangig ist. Angenommen, Uist linear abhangig. Dann existiert nach Lemma 2.52. (v) ein u∗ ∈ U ,so dass u∗ ∈ U∗ := U\u∗. Somit gilt V = L(U) = L(U∗). Dies ist einWiderspruch dazu, dass U ein minimales Erzeugendensystem war.
(i) → (iii) Da U eine Basis von V ist, ist U nach Definition auch linearunabhangig.Maximalitat: Sei u∗ ∈ V beliebig. Zu zeigen: U∗ := U ∪ u∗ ist linearabhangig. Da U ein Erzeugendensystem von V ist, so existieren n ∈ N,ai ∈ K und ui ∈ U , so dass
u∗ =n∑i=1
ai · ui.
50

Somit gilt
O = (−1) · u∗ +n∑i=1
ai · ui,
d.h. U∗ ist linear abhangig, da u∗ ∈ U∗ und ui ∈ U∗.
(iii) → (i) Wir mussen zeigen, dass L(U) = V . Sei u∗ ∈ V beliebig. Da Ueine maximale linear unabhangige Teilmenge ist, so ist U∗ := U ∪ u∗linear abhangig. Also existieren n ∈ N, a∗ ∈ K, ai ∈ K und ui ∈ U , sodass
a∗ · u∗ +n∑i=1
ai · ui = O,
wobei mindestens einer der Koeffizienten a∗, ai fur i ∈ 1, ..., n ver-schieden von Null ist. Ware a∗ = 0, so ware U linear abhangig (Wi-derspruch zur Voraussetzung, dass U eine Basis ist). Also ist a∗ 6= 0.Somit gilt
u∗ =n∑i=1
(−a−1∗ · ai) · ui ∈ L(U),
d.h. V = L(U).
2
Bemerkung 2.55. Sei V ein K-Vektorraum und U ⊆ V eine Basis von V .Dann lasst sich jeder Vektor v ∈ V eindeutig als eine Linearkombination vonVektoren aus U darstellen.
Beweis: Sei v ∈ V beliebig. Da U eine Basis ist, so ist L(U) = V . Daherexistieren Vektoren ui ∈ U und Skalare ai ∈ K, so dass
v =n∑i=1
ai · ui. (2.1)
Es bleibt die Eindeutigkeit dieser Darstellung zu zeigen. Wir nehmen an,dass es eine weitere Darstellung
v =m∑j=1
bi · uj (2.2)
mit uj ∈ U und bj ∈ K gibt. Dann gilt∑n
i=1 ai · ui =∑m
j=1 bi · uj und somit
n∑i=1
ai · ui +m∑j=1
(−bi) · uj = O.
51

Da U eine Basis ist und ui, uj ∈ U , so sind alle Koeffizienten der Linear-kombination gleich Null. Wir mussen dabei aber aufpassen, dass ui = ujfur gewisse i und j sein kann. Falls uj /∈ u1, ..., un, dann ist bj = 0. Fallsui /∈ u1, ..., um, dann ist ai = 0. Falls ui = uj fur gewisses i ∈ 1, ..., nund j ∈ 1, ...,m, dann gilt ai + (−bj) = 0, d.h. ai = bj. Dies bedeutet abergerade, dass die Darstellungen (2.1) und (2.2) gleich sind. 2
3 Endlich erzeugte Vektorraume
Definition 3.1. Ein K-Vektorraum V heißt endlich erzeugt, falls eineendliche Teilmenge U von V mit V = L(U) existiert.
Beispiele:
1. Kn ist endlich erzeugt. U = e1, ..., en ist ein Erzeugendensystem mitn Elementen.
2. K[x] ist nicht endlich erzeugt. Angenommen, es gabe eine endliche Teil-menge U = p1, ..., pn mit L(U) = K[x]. Dann ist jedes Element pivon U ein Polynom mit Koeffizienten in K. Sei
m := max1≤i≤n
deg(pi)
Dann gehort p(x) = xm+1 ∈ K[x] nicht zu L(U).
3.1 Existenz einer Basis
Satz 3.2. Sei V ein endlich erzeugter Vektorraum. Dann besitzt V eine end-liche Basis. Falls V = L(U) und U endlich, dann existiert stets eine BasisW mit W ⊆ U .
Beweis: Sei V = L(U) und U ⊆ V endlich. Wir konstruieren nun eine BasisW von V mit Elementen aus U wie folgt:
1. Setze W1 := U und i := 1. Dann gilt L(Wi) = L(U).
2. Falls ein w ∈ Wi existiert, so dass w ∈ L(Wi\w), dann setzen wirWi+1 := Wi\w. Da w ∈ L(Wi+1), so gilt L(Wi+1) = L(Wi) = L(U).Nun setzen wir i := i+ 1.
3. Wir setzen 2. solange fort bis es kein w ∈ Wi mit w ∈ L(Wi\w)mehr gibt. Da U endlich ist, so tritt dieser Fall nach endlichen vielenSchritten ein. Dann sei W := Wi.
52

Nach Lemma 2.52. (v) ist W linear unabhangig. Somit ist W eine endlicheBasis von V , denn L(W ) = L(Wi) = L(U) = V . 2
Beispiel: V = R2 = L(U) fur U = (1, 1), (2, 3), (3, 4), denn jedes Element(a, b) ∈ R2 lasst sich darstellen als
(a, b) = (3a− 2b) · (1, 1) + (b− a) · (2, 3) + 0 · (4, 5).
Mit dieser Darstellung sieht man leicht, dass auch W1 = (1, 1), (2, 3) einErzeugendensystem von R2 ist. Die lineare Unabhangigkeit von W1 sieht manleicht: Falls
a · (1, 1) + b · (2, 3) = 0, so a+ 2b = 0 ∧ a+ 3b = 0.
Offenbar gilt dies nur fur a = 0 und b = 0. Somit ist W1 eine Basis von R2.Ubrigens ist auch W2 = (1, 1), (3, 4) eine Basis von R2, da
(2, 3) = (−1) · (1, 1) + 1 · (3, 4) ∈ L(W2).
Von der linearen Unabhangigkeit von W2 kann man sich wieder leicht uber-zeugen.
3.2 Basiserganzungssatz
Satz 3.3. (Basiserganzungssatz) Sei V ein endlich erzeugter Vektorraumund U ⊆ V linear unabhangig. Dann lasst sich U zu einer Basis von Verganzen, d.h. es existiert eine Basis W von V mit U ⊆ W .
Beweis: Da V ein endlich erzeugter Vektorraum ist, so existiert ein
U = u1, ..., un ⊆ V mit L(U) = V.
Wir konstruieren nun eine Basis W von V mit U ⊆ W wie folgt.
1. Sei W0 := U und i := 0. Dann ist Wi linear unabhangig.
2. Falls ui+1 ∈ L(Wi), dann sei Wi+1 := Wi. Falls ui+1 /∈ L(Wi), dannsetzen wir Wi+1 := Wi ∪ ui+1. In beiden Fallen gilt mit Lemma 2.52(v), dass Wi+1 linear unabhangig ist. Außerdem gilt Wi ⊆ Wi+1 undui+1 ∈ L(Wi+1).
3. Falls i < n, so setzen wir i := i + 1 und gehen zu 2. Falls i = n, sosetzen wir W := Wi.
53

Nach Konstruktion ist Wi stets linear unabhangig, somit ist auch W = Wn
linear unabhangig. Da Wi ⊆ Wi+1 und ui+1 ∈ L(Wi+1) fur alle i = 0, ..., n−1,so gilt U ⊆ L(Wn) = L(W ). Damit haben wir V = L(U) ⊆ L(W ) ⊆ V , d.h.V = L(W ). Somit ist W eine Basis von V . Nach Konstruktion gilt auch
U = W0 ⊆ W1 ⊆ W2 ⊆ ... ⊆ Wn = W.
2
Beispiel: V = R2 und U = (2, 3). Offenbar ist U linear unabhangig. Au-ßerdem gilt V = L(U) mit U = (1, 0), (0, 1). Dann ist W := (2, 3), (1, 0)eine Basis von V .
3.3 Austauschsatz
Lemma 3.4. (Austauschlemma) Sei U = u1, ..., un eine Basis einesVektorraumes V und
w =n∑i=1
ai · ui
mit ak 6= 0 fur ein k ∈ 1, ..., n. Dann ist
U := u1, ..., uk−1, w, uk+1, ..., un
auch eine Basis von V .
Beweis: Da ak 6= 0, so gilt
uk =k−1∑i=1
(−a−1k · ai) · ui + a−1
k · w +n∑
i=k+1
(−a−1k · ai) · ui ∈ L(U).
Somit gilt V = L(U) ⊆ L(U), also ist V = L(U). Wir mussen nun noch dielineare Unabhangigkeit von U zeigen. Sei dazu
k−1∑i=1
bi · ui + bk · w +n∑
i=k+1
bi · ui = 0.
Dann gilt
0 =k−1∑i=1
bi · ui +n∑i=1
(bk · ai) · ui +n∑
i=k+1
bi · ui
=k−1∑i=1
(bi + bk · ai) · ui + (bk · ak) · uk +n∑
i=k+1
(bi + bk · ai) · ui.
54

Da U eine Basis ist, so wissen wir, dass
bi + bk · ai = 0 ∀i 6= k und bk · ak = 0.
Da ak 6= 0, so gilt bk = 0 und damit auch bi = 0 fur alle i = 1, ..., n. 2
Satz 3.5. (Austauschsatz) Sei U = u1, ..., un eine Basis eines Vektor-raumes V und W = w1, ..., wr ⊆ V linear unabhangig. Dann gilt r ≤ nund nach geeigneter Umsortierung von U ist
U := w1, ..., wr, ur+1, ..., un
eine Basis von V .
Beweis: Da w1 ∈ V = L(U), so haben wir
w1 =n∑i=1
ai · ui
mit ak 6= 0 fur ein k ∈ 1, ..., n. Nun sortieren wir U so um, dass
w1 =n∑i=1
ai · ui
mit a1 6= 0. Dann ist nach dem Austauschlemma
U1 := w1, u2, ..., un
eine Basis von V . Da w2 ∈ V = L(U1), so haben wir
w2 = a1 · w1 +n∑i=2
ai · ui
mit ak 6= 0 fur ein k ∈ 1, ..., n. Da W linear unabhangig ist, so gilt ak 6= 0fur ein k ∈ 2, ..., n. Nun sortieren wir U so um, dass
w2 = a1 · w1 +n∑i=2
ai · ui
mit a2 6= 0. Dann ist nach dem Austauschlemma
U2 := w1, w2, u3, ..., un
55

eine Basis von V . Dies konnen wir nun analog fur w3, ..., wm fortfuhren,wobei m = minr, n. Falls r < n, so erhalten wir mit U := Ur eine Basisder Form
U := w1, ..., wr, ur+1, ..., unFalls r = n, so ist
Un = w1, w2, w3, ..., wneine Basis von V . Ware r > n, so ware W linear abhangig, da
wr ∈ V = L(Un) = L(w1, ..., wn).
Also gilt r ≤ n und es folgt die Behauptung des Satzes. 2
3.4 Dimension und Dimensionssatz
Definition 3.6. Sei V ein endlich erzeugter K-Vektorraum. Dann hat V dieDimension n, falls es eine Basis U ⊆ V gibt, die aus genau n Elementenbesteht. Wir schreiben dimKV = n.
Bemerkung: Aus dem Austauschsatz folgt, dass fur zwei beliebige BasenU = u1, .., un und W = w1, ..., wm eines Vektorraumes V gilt: n = m.Damit ist die Definition 3.4 gerechtfertigt.
Bemerkung: Falls V kein endlich erzeugter Vektorraum ist, dann sagt manauch, dass die Dimension von V unendlich ist.
Beispiele:
1. dimKKn = n mit Basis e1, ..., en, also insbesondere dimRRn = n.
Damit wissen wir, dass jede Basis von Kn aus genau n Elementenbesteht.
2. dimCC = 1 mit Basis 1
3. dimRC = 2 mit Basis 1, i
4. dimRR[x] =∞
5. dimQR =∞ (folgt daraus, dass Q abzahlbar und R uberabzahlbar ist.)
Bemerkung: Endlich erzeugte Vektorraume nennen wir jetzt endlich di-mensionale Vektorraume. Wir sprechen von einem n-dimensionalen Vek-torraum V , falls dimKV = n.
Korollar 3.7. Sei W ein Unterraum eines n-dimensionalen VektorraumesV . Dann gilt dimKW ≤ n.
56

Beweis: Sei U eine Basis von V . Dann besitzt U genau n Elemente. Wirkonstruieren nun eine Basis von W auf folgende Weise:
1. Sei i := 0 und sei U0 := U ∩W . Dann ist U0 linear unabhangig undU0 ⊆ W . Sei n0 die Anzahl aller Elemente von U0. Offenbar ist n0 ≤ n.
2. Falls L(Ui) = W , dann ist Ui eine Basis von W . Falls L(Ui) ( W , dannexistiert ein w ∈ W\L(Ui), d.h. Ui+1 := Ui∪w ist linear unabhangig.Nach dem Austauschsatz existiert eine Basis U von V mit Ui+1 ⊆ U .Sei ni+1 die Anzahl aller Elemente von Ui+1. Da U aus n Elementenbesteht, so ist ni+1 ≤ n. Nach Konstruktion von Ui+1 gilt noch, dassni+1 = ni + 1.
3. Wir setzen 2. mit i := i + 1 solange fort bis Ui eine Basis von W ist.Da sich die Anzahl der Basiselemente stets um 1 erhoht und diese nichtgroßer als n sein kann, tritt der Fall nach endlich vielen Schritten ein.
Die angegebene Konstruktion der Basis zeigt auch, dass dimKW ≤ n. 2
Korollar 3.8. Sei W1 ein Unterraum eines endlich dimensionalen Vektor-raumes V . Dann existiert ein Unterraum W2 von V , so dass V = W1 ⊕W2.
Beweis: Nach Korollar 3.7 besitzt W1 eine endliche Basis U1 = u1, ..., uk.Dies ist eine linear unabhangige Teilmenge von V . Nach dem Basisergan-zungssatz konnen wir U1 zu einer Basis U = u1, ..., uk, uk+1, ..., un von Verganzen. Sei nun W2 := L(U2) fur U2 := uk+1, ..., un. Dann gilt offenbarV = W1 ⊕W2. 2
Satz 3.9. (Dimensionssatz) Seien W1 und W2 zwei Unterraume einesendlich dimensionalen Vektorraumes V . Dann gilt
dimK(W1 +W2) = dimKW1 + dimKW2 − dimK(W1 ∩W2).
Beweis: Sei U := u1, ..., um eine Basis von W1 ∩W2. Nach dem Basiser-ganzungssatz konnen wir U zu einer Basis B1 := u1, ..., um, v1, ..., vk vonW1 und zu einer Basis B2 := u1, ..., um, w1, ..., w` von W2 erganzen. DieBehauptung ist bewiesen, wenn wir gezeigt haben, dass
B := u1, .., um, v1, ..., vk, w1, ..., w`
eine Basis von W1 +W2 ist.Wir zeigen zuerst, dass sich alle Vektoren w ∈ W1 + W2 mit den Vektoren
57

von B erzeugen lassen. Sei w = w1 + w2 mit w1 ∈ W1 und w2 ∈ W2. Dannexistieren ai, ai, bi, bi ∈ K, so dass
w = (m∑i=1
aiui +k∑i=1
aivi) + (m∑i=1
biui +∑i=1
biwi)
=m∑i=1
(ai + bi)ui +k∑i=1
aivi +∑i=1
biwi ∈ L(B).
Somit ist B ein Erzeugendensystem von W1 +W2.Um die lineare Unabhangigkeit zu zeigen, seien ai, bi, ci ∈ K mit
m∑i=1
aiui +k∑i=1
bivi +∑i=1
ciwi = O. (3.1)
Sei v :=∑m
i=1 aiui +∑k
i=1 bivi. Dann haben wir v ∈ W1. Außerdem ist
−v =∑`
i=1 ciwi ∈ W2, d.h. auch v ∈ W2. Somit gehort v zu W1 ∩W2, d.h.wir finden di ∈ K mit
v =m∑i=1
diui.
Mit Gleichung (3.1) folgt
O = v + (−v) =m∑i=1
aiui +k∑i=1
bivi +m∑i=1
(−di)ui
=m∑i=1
(ai − di)ui +k∑i=1
bivi
Da B1 = u1, ..., um, v1, ..., vk eine Basis von W1 ist, so sehen wir, dassai − di = 0 fur alle i ∈ 1, ...,m und bi = 0 fur alle i ∈ 1, ..., k. Setzen wirletzteres in die Gleichung (3.1) ein, so erhalten wir
m∑i=1
aiui +∑i=1
ciwi = O.
Da B2 = u1, ..., um, w1, ..., w` eine Basis von W2 ist, so erhalten wir nunai = 0 fur alle i ∈ 1, ...,m und ci = 0 fur alle i ∈ 1, ..., `. 2
Korollar 3.10. Seien W1 und W2 zwei Unterraume eines endlich dimensio-nalen Vektorraumes V . Dann gilt
dimK(W1 +W2) = dimKW1 + dimKW2 ⇔ W1 ∩W2 = O.
58

Korollar 3.11. Seien W1 und W2 zwei Unterraume eines n-dimensionalenVektorraumes V . Falls
dimKW1 + dimKW2 > n,
dann gilt W1 ∩W2 6= O.
3.5 Geometrische Anschauung endlich dimensionalerVektorraume
Definition 3.12. Sei V ein endlich dimensionaler K-Vektorraum mit derBasis U = u1, ..., un und v ∈ V . Dann existiert genau eine Darstellung vonv der Form
v =n∑i=1
ai · ui mit ai ∈ K.
Man nennt die eindeutig bestimmten Faktoren a1, ..., an die Koordinatenvon v bezuglich der Basis U . Entsprechend heißt ai die i-te Koordinatevon v bezuglich der Basis U .
Beispiel: V = Kn und U = e1, ..., en. Dann ist fur v = (v1, ..., vn) ∈ V diei-te Koordinate bezuglich U gleich vi, denn
v = (v1, ..., vn) =n∑i=1
vi · (0, ..., 0, 1i, 0, ..., 0).
Im folgenden werden wir fur Vektoren im Kn in der Regel die Spaltennotation
v =
v1
v2
...vn
verwenden.
Um uns die Koordinatendarstellung geometrisch zu veranschaulichen, be-trachten wir V = R3. Jetzt identifizieren wir jeden Vektor v = (vx, vy, vz)von R3 mit einem Pfeil (Vektor) des dreidimensionalen Raumes, der vomNullpunkt zum Punkt (vx, vy, vz) zeigt (siehe Abbildung 3.1).
59

Abbildung 3.1: Vektordarstellung im R3
Dann zeigen die Einheitsvektoren e1, e2, e3 gerade in Richtung der Koordina-tenachsen (siehe Abbildung 3.2). Zusammen bilden sie eine Basis des R3.
Abbildung 3.2: Einheitsvektoren im R3
Man kann jeden Vektor des R3 als Linearkombination der drei Einheitsvekto-ren darstellen. Dazu wollen wir uns klar machen, was es geometrisch bedeutet,wenn wir einen Vektor mit einem Skalar multiplizieren und wenn wir zweiVektoren addieren. Bei der skalaren Multiplikation mit einer positiven reellenZahl c verlangert sich der Pfeil um den Faktor c. Bei der skalaren Multiplika-tion mit 0 erhalt man den Nullvektor O. Bei der skalaren Multiplikation miteiner negativen reellen Zahl c verlangert sich der Pfeil um den Faktor c undzeigt in die entgegengesetzte Richtung (siehe Abbildung 3.3).
60

Abbildung 3.3: skalare Multiplikation von Vektoren im R2
Wenn wir zwei Vektoren addieren, dann erhalten wir einen Vektor, der zuder Ebene gehort, die von den beiden Vektoren aufgespannt wird. Er zeigtgenau in die Richtung der Diagonalen des Parallelogramms, das sich aus denbeiden Vektoren ergibt (siehe Abbildung 3.4).
Abbildung 3.4: Addition von Vektoren im R2
Alle Vektoren eines 1-dimensionalen Unterraums des R3 liegen auf einer Ge-raden durch den Nullpunkt. Alle Vektoren eines 2-dimensionalen Unterraumsdes R3 liegen in einer Ebene, die den Nullpunkt enthalt.
Zwei Vektoren im R3 sind nach Bemerkung 2.52 genau dann linear unab-hangig, wenn der eine kein skalares Vielfaches des anderen Vektors ist, d.h.wenn sie nicht in dieselbe bzw. entgegengesetzte Richtung zeigen. Mit ihnenkann man mittels Linearkombinationen alle Vektoren der Ebene erzeugen,die durch die beiden Vektoren aufgespannt wird.
Drei Vektoren im R3 sind nach Bemerkung 2.52 genau dann linear unabhan-gig, wenn keiner der Vektoren eine Linearkombination der beiden anderen
61

Vektoren ist, d.h. wenn keiner der Vektoren zu der Ebene gehort, die durchdie anderen beiden Vektoren aufgespannt wird. Mit anderen Worten: Die dreiVektoren durfen nicht in einer Ebene liegen. Somit lassen sich alle Vektorenim R3 durch Linearkombination von drei Vektoren darstellen, die nicht ineiner Ebene liegen.
Beispiel: Alle Vektoren des Raumes R3 lassen sich auch durch Streckung/Stauchung, entgegengesetzte Orientierung und Addition der Basisvektoren(1, 1, 1), (1, 1, 0) und (1, 0, 0) darstellen.
Im nachsten Kapitel werden wir sehen, wie wir mit Hilfe linearer AbbildungenBewegungen von Vektoren im Raum wie z.B. Drehungen und Spiegelungenleicht beschreiben konnen.
4 Lineare Abbildungen und Matrizen
4.1 Lineare Abbildungen/Homomorphismen
Definition 4.1. Seien V und W zwei K-Vektorraume. Dann heißt eine Ab-bildung f : V → W K-linear, falls
• ∀u, v ∈ V : f(u+ v) = f(u) + f(v)
• ∀ v ∈ V ∀a ∈ K: f(a · v) = a · f(v)
Man nennt eine solche Abbildung auch einen Homomorphismus. Wirschreiben HomK(V,W ) := f | f : V → W ist K-linear.Bemerkung: Eine Abbildung ist genau dann linear, wenn fur alle a, b ∈ Kund alle u, v ∈ V gilt: f(au+ bv) = af(u) + bf(v).
Beispiele:
1. V = R2. Seien a11, a12, a21, a22 ∈ R und f : V → V
f(v) = f
(v1
v2
)=
(a11v1 + a12v2
a21v1 + a22v2
)2. V = Kn, W = Km. Seien a11, ..., amn ∈ R. f : V → W
f(v) = f
v1
v2
...vn
=
a11v1 + a12v2 + ...+ a1nvna21v1 + a22v2 + ...+ a1nvn
...am1v1 + am2v2 + ...+ amnvn
62

Als Kurzschreibweise fur eine solche Abbildung verwenden wir
f(v) = A · v,
wobei
A =
a11 a12 ... a1n
a21 a22 ... a1n
......
...am1 am2 ... amn
eine Matrix mit m Zeilen und n Spalten ist. Ublich sind auch die Kurz-schreibweisen A = (aij) und A = (aij) i = 1, ...,m
j = 1, ..., n.
3. Die Koordinatenabbildung ϕU : V → Kn mit einem n-dimensionalenVektorraum V :
ϕU(v) := (c1, c2, ..., cn),
wobei U = u1, ..., un eine Basis von V ist und v = c1u1 + ...+ cnun.
4. Drehungen von Vektoren im R2 um den Nullpunkt mit dem Drehwinkelα:
f(v) =
(cos(α)v1 − sin(α)v2
sin(α)v1 + cos(α)v2
)In Matrixschreibweise haben wir
f(v) =
(cos(α) − sin(α)sin(α) cos(α)
)· v
UA: Hinweis: Man verwende die Darstellung eines Punktes in Polar-koordinaten: (v1, v2) = (r cos(ϕ), r sin(ϕ)). Die Drehung des Punktes(v1, v2) um den Ursprung mit dem Winkel α ergibt dann in Polarkoor-dinaten
f(v1, v2) = (r cos(ϕ+ α), r sin(ϕ+ α)).
Mit Hilfe der Additionstheoreme fur die Winkelfunktionen sin und cosergibt sich die Behauptung.
5. Spiegelungen von Vektoren im R2 an einer Geraden durch den Null-punkt, wobei α der Winkel zwischen der Geraden und der x-Achse ist:
f(v) =
(cos(2α)v1 + sin(2α)v2
sin(2α)v1 − cos(2α)v2
)
63

In Matrixschreibweise haben wir
f(v) =
(cos(2α) sin(2α)sin(2α) − cos(2α)
)· v
UA: Hinweis: Man verwende wieder die Darstellung eines Punktes inPolarkoordinaten: (v1, v2) = (r cos(ϕ), r sin(ϕ)). Die Spiegelung desPunktes (v1, v2) an der Geraden durch den Nullpunkt mit dem Winkelα ergibt in Polarkoordinaten
f(v1, v2) = (r cos(2α− ϕ), r sin(2α− ϕ)).
Mit Hilfe der Additionstheoreme ergibt sich auch hier die Behauptung.
Satz 4.2. Sei f : V → W K-linear. Dann gelten folgende Eigenschaften:
(i) f(O) = O
(ii) Fur alle vi ∈ V und ai ∈ K gilt:
f(n∑i=1
aivi) =n∑i=1
aif(vi).
(iii) Falls U = u1, .., un linear abhangig ist, dann ist auch
f(U) := f(u1), ..., f(un)
linear abhangig.
(iv) Sind V ⊆ V und W ⊆ W Unterraume, dann sind auch f(V ) ⊆ W undf−1(W ) ⊆ V Unterraume.
(v) dimKf(V ) ≤ dimKV .
(vi) Falls f bijektiv ist, so ist auch f−1 : W → V K-linear.
Beweis:
(i) f(O) = f(0 · O) = 0 · f(O) = O
(ii) folgt einfach aus der Definition einer linearen Abbildung per Induktionuber n
64

(iii) Sei U = u1, .., un linear abhangig. Dann existieren a1, ..., an ∈ K, sodass
n∑i=1
aiui = O,
wobei mindestens ein ai 6= 0. Wegen (i) und (ii) gilt nun
O = f(n∑i=1
aiui) =n∑i=1
aif(ui),
d.h. f(U) = f(u1), ..., f(un) ist linear abhangig.
(iv) Wir zeigen zunachst, dass f(V ) ein Unterraum ist. Seien w1, w2 ∈ f(V ).Dann existieren v1 und v2 ∈ V mit w1 = f(v1) und w2 = f(v2). Somitbekommen wir
w1 + w2 = f(v1) + f(v2) = f(v1 + v2) ∈ f(V ).
Fur w ∈ f(V ), a ∈ K existiert ein v ∈ V , so dass w = f(v) und es gilt
a · w = a · f(v) = f(a · v) ∈ f(V ).
Nun zeigen wir, dass f−1(W ) ein Unterraum ist. Seien v1, v2 ∈ f−1(W ).Dann existieren w1, w2 ∈ W mit w1 = f(v1) und w2 = f(v2). Somithaben wir
f(v1 + v2) = f(v1) + f(v2) = w1 + w2 ∈ W , d.h. v1 + v2 ∈ f−1(W ).
Fur v ∈ f−1(W ), a ∈ K existiert ein w ∈ W , so dass w = f(v) und esgilt
f(a · v) = a · f(v) = a · w ∈ W , d.h. a · v ∈ f−1(W ).
(v) Falls dimV = ∞, so ist die Aussage trivial. Sei nun dimV = n ∈ N.Angenommen, dim f(V ) > n. Dann gabe es n + 1 linear unabhangigeVektoren w1, ..., wn+1 ∈ f(V ). Seien v1, ..., vn+1 ∈ V so gewahlt, dassf(vi) = wi fur alle i = 1, ..., n + 1. Da dimV = n, so ist U =v1, ..., vn+1 linear abhangig. Wegen (iii) waren dann w1, ..., wn+1 auchlinear abhangig - im Widerspruch zur Annahme.
(vi) Seien w1, w2 ∈ W . Dann existieren v1, v2 ∈ V , so dass f(v1) = w1 undf(v2) = w2 und wir wissen, dass
f(v1 + v2) = f(v1) + f(v2) = w1 + w2, d.h. v1 + v2 = f−1(w1 + w2)
65

und damitf−1(w1) + f−1(w2) = f−1(w1 + w2).
Seien w ∈ W und a ∈ K. Dann existiert ein v ∈ V , so dass f(v) = wund es gilt
f(a · v) = a · f(v) = a · w, d.h. a · v = f−1(a · w),
alsoa · f−1(w) = f−1(a · w).
2
Satz 4.3. HomK(V,W ) ist ein Unterraum von
AbbK(V,W ) = f | f : V → W ist eine Abbildung.
Dabei ist die Addition zweier Abbildungen f1, f2 definiert als
(f1 + f2)(v) = f1(v) + f2(v) ∀ v ∈ V.
Die Multiplikation mit einem Skalar a ∈ K ist definiert als
(a · f)(v) = a · f(v) ∀ v ∈ V.
Beweis: Offenbar ist die Nullabbildung f0 : V → W mit f(v) = O fur allev ∈ V eine lineare Abbildung, d.h. f0 ∈ HomK(V,W ).
Seien f1, f2 ∈ HomK(V,W ). Dann gilt fur alle v, w ∈ V und a, b ∈ K, dass
(f1 + f2)(a · v + b · w) = f1(a · v + b · w) + f2(a · v + b · w)
= a · f1(v) + b · f1(w) + a · f2(v) + b · f2(w)
= a · (f1 + f2)(v) + b · (f1 + f2)(w).
Seien f ∈ HomK(V,W ) und c ∈ K. Dann gilt fur alle v, w ∈ V und a, b ∈ K,dass
(c · f)(a · v + b · w) = c · f(a · v + b · w)
= a · c · f(v) + b · c · f(w)
= a · (c · f)(v) + b · (c · f)(w). 2
Bemerkung: Die Hintereinanderausfuhrung linearer Funktionen ist wiederlinear, d.h. wenn f : V → W und g : W → X linear sind, so ist gf : V → Xauch linear (leichte Ubungsaufgabe).
66

Die Hintereinanderausfuhrung zweier linearer Abbildungen f : Kn → Km
und g : Km → K` mit
f(x) = Ax =
a11 ... a1n
......
am1 ... amn
x, g(x) = Bx =
b11 ... b1m
......
b`1 ... b`m
x
ist dann eine lineare Abbildung h : Kn → K` mit
h(x) = (B A)(x) = B(Ax) =: Cx =
c11 ... c1n
......
c`1 ... c`n
x
wobei
cij =m∑k=1
bikakj ∀ i = 1, ..., `, j = 1, ..., n,
denn
B(Ax) =
b11 ... b1m
......
b`1 ... b`m
n∑j=1
a1jxj
...n∑j=1
amjxj
=
m∑k=1
b1k
n∑j=1
akjxj
...m∑k=1
b`kn∑j=1
akjxj
=
n∑j=1
(m∑k=1
b1kakj)xj
...n∑j=1
(m∑k=1
b`kakj)xj
=
m∑k=1
b1kak1 ...m∑k=1
b1kakn
......
m∑k=1
b`kak1 ...m∑k=1
b`kakn
x.
Aus diesem Grunde definiert man die Multiplikation zweier MatrizenA = (akj)k = 1, ...,m
j = 1, ..., nund B = (bik) i = 1, ..., `
k = 1, ...,mals
B · A := C = (cij) i = 1, ..., `j = 1, ..., n
=
(m∑k=1
bikakj
)i = 1, ..., `j = 1, ..., n
Achtung: Die Multiplikation zweier Matrizen ist im allgemeinen nicht kom-mutativ. Wir haben dies bereits bei der Hintereinanderausfuhrung von Ab-bildungen festgestellt.
67

Beispiel:
A =
(1 2 34 5 6
), B =
6 01 20 3
Dann gilt
B · A =
6 12 189 12 1512 15 18
und A ·B =
(8 1329 28
).
Bemerkung 4.4. Sei U = u1, ..., un eine Basis eines endlich dimensiona-len K-Vektorraums V . Sei weiter W ein K-Vektorraum. Dann ist jede lineareAbbildung f : V → W eindeutig durch die Vorgabe f(ui) der Basisvektorenui fur i = 1, ..., n bestimmt.Sei wi := f(ui) und v ∈ V beliebig. Da U eine Basis von V ist, so existierteine eindeutige Darstellung v =
∑ni=1 aiui und es gilt
f(v) = f(n∑i=1
aiui) =n∑i=1
f(aiui) =n∑i=1
aif(ui).
Falls V = Kn, W = Km und U = e1, ..., en, so stellen die Vektorenf(e1), ..., f(en) gerade die Spaltenvektoren der Matrix A dar, fur die f(x) =Ax gilt. Dies wird klar, wenn man beachtet, dass
f(ei) = Aei =
a1i
...ami
∀ i = 1, ..., n.
Definition 4.5. Eine Abbildung f in HomK(V,W ) heißt
• K-Monomorphismus, falls f injektiv ist,
• K-Epimorphismus, falls f surjektiv ist,
• K-Isomorphismus, falls f bijektiv ist,
• K-Endomorphismus, falls V = W ,
• K-Automorphismus, falls V = W und f bijektiv ist.
Beispiele:
1. Die Abbildung f : R2 → R3 mit f(x, y) = (x, x + y, x − y) ist einR-Monomorphismus.
68

2. Die Abbildung f : R3 → R2 mit f(x, y, z) = (x, y) ist ein R-Epimorphismus.
3. Die Abbildung f : C→ R2 mit f(a+bi) = (a, b) ist ein R-Isomorphismus.
4. Die Abbildung f : R3 → R3 mit f(x, y, z) = (x, y+ z, x+ y+ z) ist einR-Endomorphismus.
5. Die Abbildung f : R2 → R2 mit f(x, y) = (x + y, x − y) ist ein R-Automorphismus (und zugleich einR-Endomorphismus, ein R-Isomorphismus,ein R-Epimorphismus, ein R-Monomorphismus).
6. Die Abbildung f : R2 → R2 mit f(x, y) = (x2, y2) ist keiner der ge-nannten Morphismen, da f nicht linear ist.
Bemerkung:
1. Die Menge EndK(V ) aller K-Endomorphismen bildet mit (+, ) einenRing (UA).
2. Die Menge AutK(V ) aller K-Automorphismen bildet mit eine Unter-gruppe von EndK(V ) (UA).
Definition 4.6. Zwei K-Vektorraume V und W heißen isomorph, falls eseinen K-Isomorphismus f : V → W gibt.
Satz 4.7. Sei V ein n-dimensionaler K-Vektorraum. Dann ist V isomorphzu Km genau dann, wenn m = n.
Beweis: Sei U = u1, ..., un eine Basis von V . Dann ist die Koordinaten-abbildung ϕU : V → Kn ein Isomorphismus von V nach Kn. Die Abbildungist bijektiv, da sich jeder Vektor v ∈ V mit eindeutig bestimmten Koeffizi-enten/Koordinaten c1, ..., cn ∈ K als
v =n∑i=1
ci · ui
darstellen lasst.
Angenommen, es gabe einen Isomorphismus f : V → Km fur m 6= n. Dannware g := f ϕ−1
U ein Isomorphismus von Kn nach Km. Dann ware B :=g−1(e1), ..., g−1(em) ⊆ Kn wegen Satz 4.2 (iii) linear unabhangig. Zudemgabe es fur jedes v ∈ Kn ein w ∈ Km mit v = g−1(w). Dann ware w =∑m
i=1 wiei mit wi ∈ K fur alle i = 1, ...,m und somit ware
v = g−1(m∑i=1
wiei) =m∑i=1
wig−1(ei),
69

d.h. jedes v ∈ Kn wurde zu L(B) gehoren. Somit ware B eine Basis von Kn
und hatte daher die Lange n, d.h. m = n. 2
Satz 4.8. Seien V und W endlich dimensionale K-Vektorraume. Dann istV isomorph zu W genau dann, wenn dimKV = dimKW .
Beweis:
(→) Sei f : V → W ein Isomorphismus, dimK V = n und dimKW = m. SeiU eine Basis von V und U eine Basis von W . Dann ist nach Satz 4.7V isomorph zu Kn und W isomorph zu Km. Daher ist ϕU f ϕ−1
U :Kn → Km ein Isomorphismus und somit n = m wegen Satz 4.7.
(←) Sei dimKV = dimKW = n. Seien U und U Basen von V und W . Dannist die Abbildung f := ϕU ϕ−1
U : V → W ein Isomorphismus.
2
4.2 Bild, Kern, Rang und Defekt linearer Abbildungen
Definition 4.9. Sei f : V → W eine K-lineare Abbildung. Dann nennenwir
(i) im f := f(V ) das Bild von f (engl. image),
(ii) ker f := f−1(O) den Kern bzw. den Nullraum von f (engl. kernel),
(iii) rank f := dimK(im f) den Rang von f (engl. rank),
(iv) def f := dimK(ker f) den Defekt von f (engl. defect).
Bemerkung: Fur beliebige w ∈ W nennt man f−1(w) die Faser von fuber w.
Lemma 4.10. Sei f : V → W eine K-lineare Abbildung. Dann gilt:
(i) im f ist ein Unterraum von W
(ii) ker f ist ein Unterraum von V .
(iii) im f = W genau dann, wenn f surjektiv ist.
(iv) ker f = O genau dann, wenn f injektiv ist.
Beweis:
70

(i) Da f linear ist, so ist O = f(O) ∈ im f . Seien w1, w2 ∈ im f . Dannexistieren v1, v2 ∈ V , so dass f(v1) = w1 und f(v2) = w2. Daraus folgt,dass
w1 + w2 = f(v1) + f(v2) = f(v1 + v2) ∈ im f.
Sei nun w ∈ im f und c ∈ K. Dann existiert ein v ∈ V , so dassf(v) = w und wir sehen, dass
c · w = c · f(v) = f(c · v) ∈ im f.
(ii) Wegen O = f(O) haben wir O ∈ ker f . Seien v1, v2 ∈ ker f . Dann giltf(v1) = O und f(v2) = O und daher
f(v1 + v2) = f(v1) + f(v2) = O, d.h. v1 + v2 ∈ ker f.
Sei nun v ∈ ker f und c ∈ K. Dann haben wir f(v) = O und
f(c · v) = c · f(v) = O, d.h. c · v ∈ ker f.
(iii) klar per Definition
(iv) (→) Seien v1, v2 ∈ V mit f(v1) = f(v2) gegeben. Dann gilt
f(v1 + (−v2)) = f(v1) + (−f(v2)) = O.
Da ker f = O, so gilt v1 + (−v2) = O, d.h. v1 = v2.(←) Klar nach Definition.
2
Wir haben bereits gesehen, dass wir lineare Abbildungen von Kn → Km mitHilfe von Matrizen darstellen konnen. Wir wollen uns nun oben genannteBegriffe fur Matrizen naher anschauen.
Definition 4.11. Wir bezeichnen mit M(m × n,K) die Menge aller Ma-trizen mit m Zeilen und n Spalten. Dann reprasentiert jede Matrix A ∈M(m × n,K) eine lineare Abbildung fA : Kn → Km mit fA(x) = Ax undwir definieren
(i) im A = im fA als das Bild von A,
(ii) kerA = ker fA als den Kern von A,
(iii) rankA = rank fA als den Rang von A.
71

(iv) def A := def (fA) den Defekt von A.
Bemerkung:
1. M(m× n,K) ist mit der Addition und der skalaren Multiplikation einVektorraum der Dimension m · n. Die Matrizen
Ak` := (aij)i = 1, ...,mj = 1, ..., n
mit aij =
1, falls k = i ∧ ` = j
0, sonst
fur k = 1, ...,m, ` = 1, ..., n bilden eine Basis von M(m× n,K).
2. Sei A ∈M(m× n,K). Dann folgt per Definition, dass
(a) im A = w ∈ Km | ∃v ∈ Kn : w = Av,(b) kerA = v ∈ Kn |Av = O,(c) rankA = dimK(im A).
3. Die Bestimmung des Kernes einer Matrix A ∈M(m×n,K) entsprichtder Bestimmung aller Losungen des homogenen linearen Gleichungs-systems Ax = O, d.h.
a11x1 + ...+ a1nxn = 0,
......
am1x1 + ...+ amnxn = 0.
4. Ein Vektor y ∈ Km gehort genau dann zu im A, wenn das lineareGleichungssystem Ax = y, d.h.
a11x1 + ...+ a1nxn = y1,
...
am1x1 + ...+ amnxn = ym.
eine Losung x ∈ Kn besitzt.
Wir konnen den Bildraum einer Matrix A ∈ M(m × n,K) auch wie folgtdarstellen:
im A = L(Ae1, Ae2, ..., Aen),d.h. im A wird von den Spaltenvektoren der Matrix A erzeugt. Man bezeich-net dimK L(Ae1, Ae2, ..., Aen) daher auch als den Spaltenrang der Matrix
72

A. Offenbar gilt stets, dass der Rang von A gleich dem Spaltenrang von Aist. Betrachtet man anstelle der Spaltenvektoren nun die Zeilenvektoren
ai = (ai1 ... ain) ∀ i = 1, ...,m,
so definiert man dimK L(a1, a2, ..., am) als Zeilenrang von A.
Definition 4.12. Sei A ∈ M(m× n,K) eine Matrix. Dann ist die Trans-ponierte AT von A definiert als
AT := (bij)i = 1, ...,mj = 1, ..., n
mit bij = aji.
Bemerkung: Die Spalten von A bilden gerade die Zeilen von AT. Die Zeilenvon A stellen die Spalten von AT dar. Somit gilt offenbar, dass der Spalten-rang von A gleich dem Zeilenrang von AT und der Zeilenrang von A gleichdem Spaltenrang von AT ist.
Es gilt aber sogar noch mehr: Fur jede Matrix A ist der Zeilenrang gleichdem Spaltenrang. Den Beweis gibt es an spaterer Stelle.
Satz 4.13. (Dimensionssatz fur lineare Abbildungen) Seien V , Wzwei K-Vektorraume und f ∈ HomK(V,W ). Dann gilt:
dimK V = dimK(ker f) + dimK(im f) = def (f) + rank (f).
Entsprechend gilt fur jede Matrix A ∈M(m× n,K), dass
n = dim(kerA) + dim(im A) = def (A) + rank (A).
Beweis: Sei f ∈ HomK(V,W ) und n := dimK(V ). Sei weiter U := u1, ..., ukeine Basis von ker f . Nun erganzen wir U zu einer Basis u1, ..., uk, uk+1, ..., unvon V und definieren Z := L(uk+1, ..., un). Dann gilt V = ker f ⊕ Z undaufgrund des Dimensionssatzes fur Vektorraume erhalten wir
dimK(V ) = dimK(ker f) + dimK Z.
Nun zeigen wir, dass Z isomorph zu im f ist. Da zwei isomorphe Raume stetsdie gleiche Dimension haben, so folgt damit die Behauptung des Satzes.Dazu definieren wir die Abbildung ϕ : Z → im f mit
ϕ(z) := f(z).
Da f linear ist, so ist auch ϕ linear. Zudem ist ϕ injektiv, denn aus ϕ(z1) =ϕ(z2) folgt,
f(z1) = f(z2), d.h. f(z1 − z2) = O
73

und somit z1 − z2 ∈ ker f . Dies bedeutet aber auch
z1 − z2 ∈ ker f ∩ Z = O,
also z1 = z2. Es bleibt zu zeigen, dass ϕ auch surjektiv ist. Sei w ∈ im fbeliebig. Dann existiert ein v ∈ V , so dass f(v) = w. Sei nun
v = x+ z mit x ∈ ker f, z ∈ Z.
Dann gilt
ϕ(z) = f(z) = f(v − x) = f(v)− f(x) = f(v) = w,
d.h. ϕ ist bijektiv und somit ein Isomorphismus von Z nach im f . 2
4.3 Matrizen und lineare Gleichungssysteme
Jedes lineare Gleichungssystem
a11x1 + ...+ a1nxn = b1
......
am1x1 + ...+ amnxn = bm
mit aij, bi, xj ∈ K fur alle i = 1, ...,m und j = 1, ..., n lasst sich kurz inMatrix-Vektorschreibweise als
Ax = b (4.1)
formulieren, wobei x und b Spaltenvektoren mit den Eintragen x1, ..., xn undb1, ..., bm sind.
Bevor wir uns Methoden zuwenden, wie man lineare Gleichungssysteme all-gemein losen kann, beschaftigen wir uns mit der Frage, wann ein linearesGleichungssystem losbar und wann die Losung eindeutig ist.
Satz 4.14. Das lineare Gleichungssystem (4.1) ist fur jedes b ∈ Km genaudann eindeutig losbar, wenn rank (A) = m = n.
Beweis: Offenbar ist das lineare Gleichungssystem (4.1) fur jedes b ∈ Km
genau dann eindeutig losbar, wenn die lineare Abbildung fA : Kn → Km
mit fA(x) = Ax eine bijektive Abbildung, also ein Isomorphismus ist.
(⇒) Sei fA : Kn → Km ein Isomorphismus. Dann ist im (fA) = Km undker(fA) = 0 und somit
rank (fA) = m, def (fA) = 0.
74

Der Dimensionssatz 4.14 liefert n = rank (fA) + def (fA) = m+ 0 = m.
(⇐) Sei rank (A) = m = n. Dann gilt rank (fA) = m und aufgrund desDimensionssatzes 4.14, dass def (fA) = n−m = 0. Dies bedeutet
dimK(im fA) = m und dimK(ker fA) = 0.
Da im fA ⊆ Km und dimK Km = m, so folgt im fA = Km. Zudem haben
wir ker fA = 0, d.h. fA ist ein Isomorphismus. 2
Die Losung eines eindeutig losbaren Gleichungssystems lasst sich auch mitHilfe der sogenannten Inversen einer Matrix darstellen. Dazu betrachten wirzunachst eine Matrix A ∈M(m× n,K) und die sogenannten Einheitsmatri-zen
Im :=
1 0 . . . 00 1 . . . 0...
.... . .
...0 0 . . . 1
︸ ︷︷ ︸
m Spalten
, In :=
1 0 . . . 00 1 . . . 0...
.... . .
...0 0 . . . 1
︸ ︷︷ ︸
n Spalten
der Dimension m bzw. n. Dann gilt aufgrund der Definition der Matrixmul-tiplikation, dass
A · In = A = Im · A.
Definition 4.15. Sei A ∈M(m× n,K) eine Matrix. Die Matrix A heißtinvertierbar, falls eine inverse Matrix A−1 existiert, so dass
A−1A = In und AA−1 = Im.
Eine Matrix B heißt linksinverse Matrix von A, falls BA = In.Eine Matrix B heißt rechtsinverse Matrix von A, falls AB = Im.
Satz 4.16. A ∈M(m×n,K) ist genau dann invertierbar, wenn rank (A) =m = n.
Beweis: Nach Satz 4.14 brauchen wir nur zu zeigen, dass A ∈M(m×n,K)genau dann invertierbar ist, wenn es zu jedem b ∈ Km genau eine Losungx ∈ Kn des Systems Ax = b gibt.
(→) Sei A invertierbar. Dann ist x = A−1b wegen AA−1b = b eine Losungvon Ax = b. Diese ist auch eindeutig, da x = A−1Ax = A−1b fur jedeLosung von Ax = b.
75

(←) Da e1, ..., em = Ax1, ..., Axm linear unabhangig ist, so ist die Mengex1, ..., xm auch linear unabhangig. Nach Voraussetzung wissen wir,dass m = n. Somit ist die Menge x1, ..., xm eine Basis von Km = Kn.Damit lasst sich jedes ei ∈ Kn darstellen als
ei =m∑j=1
cijxj =(x1 x2 . . . xm
)ci1ci2...cim
︸ ︷︷ ︸
=:zi
= Bzi.
Dann gilt
ei = Bzi = BImzi = B(AB)zi = BA(Bzi) = BAei.
Durch Zusammensetzung der Spalten erhalten wir
In =(e1 e2 . . . en
)=((BA)e1 (BA)e2 . . . (BA)en
)= BA.
2
Bemerkung: Der Beweis hat gezeigt, dass sich fur invertierbare Matrizen Adie eindeutige Losung der Gleichung Ax = b als x = A−1b darstellen lasst.
Wie lasst sich ein lineares Gleichungssystem Ax = b nun allgemein losen?Wie konnen wir die inverse Matrix A−1 fur invertierbare Matrizen bestim-men? Dafur gibt es eine Vielzahl von Moglichkeiten. An dieser Stelle lernenSie das sogenannte Gaußsche Eliminationsverfahren kennen. Es beschreibtden naturlichen Weg, den vermutlich jeder “zu Fuß” gehen wurde. Spaterlernen Sie in der Numerik weitere Verfahren kennen, die bestimmte System-strukturen nutzen und damit deutlich effektiver sind.
Dies ist in Simulationsanwendungen ein zentraler Punkt. Manchmal mussenSysteme mit 1 Milliarde Gleichungen und einer Milliarde Unbekannten gelostwerden. Selbst auf dem schnellsten Rechner der Welt Tianhe-2 in Chinamit 33.86 Petaflops wurde man mit dem Gaußschen Eliminationsverfahrendafur etwa 30s benotigen. Effektivere Verfahren brauchen dafur nur etwa 0.1Mikrosekunden. Auf einem gewohnlichen PC (mit 50 Gigaflops) brauchteman mit dem Gaußschen Eliminationsverfahren sogar rund 230 Tage, mitgeeigneteren Verfahren schafft man es in einer Zehntelsekunde.
Dennoch bildet das Gaußsche Eliminationsverfahren noch immer einwichtiges Basiswissen, auf dem viele Uberlegungen aufbauen. Wir skizzierendie Idee zunachst an einem einfachen Beispiel.
76

2x+ 3y + z = 7 (a)
6x− 3y − z = 1 (b)
4x+ 9y − 2z = 24 (c)
Intuitiv wurde man als erstes die Gleichung nach x auflosen und den resul-tierenden Term in die unteren beiden Gleichungen einsetzen, um dann einkleineres System mit nur noch zwei Variablen (y und z) zu erhalten. Wirbekamen auf diese Weise
x = −3
2y − 2z + 1
und danach
−12y − 4z = −20 (b’)
3y − 4z = 10. (c’)
Man kann sich aber auch den Auflosungsschritt sparen und das System (b’)-(c’) direkt aus (a)-(c) erhalten, indem man die erste Gleichung (a)
1. mit −3 multipliziert und zur zweiten Gleichung (b) addiert sowie
2. mit −2 multipliziert und zur dritten Gleichung (c) addiert.
Dieses Vorgehen nennt man Eliminationsschritt (Elimination von x in denunteren beiden Gleichungen). Diese Form der Elimination kann man nun fury in dem System (b’)-(c’) wiederholen. Wir multiplizieren also (b’) mit 1
4und
addieren sie zur Gleichung (c’) und erhalten
−5z = 5. (c”)
Fasst man nun die im ersten Eliminationsschritt unveranderte Gleichung (a),die im zweiten unveranderte Gleichung (b’) sowie die letzte Gleichung (c”)zusammen, so haben wir
2x+ 3y + z = 2
−12y − 4z = −20
−5z = 5
Die Losung dieses Systems findet man nun ganz einfach durch Ruckwarts-einsetzen, d.h.
z = −1, y = − 1
12(−20 + 4z) = 2, x =
1
2(7− 3y − z) = 1.
77

Dies ist dann auch die Losung von (a)-(c), wie man leicht durch Probe prufenkann.
Nun wollen wir diese Idee allgemein fur beliebige Gleichungssysteme in Ma-trixschreibweise formulieren und zeigen, dass sich die Losungsmenge durchdie Umformungen nicht andert.
Wir betrachten dazu das allgemeine System Ax = b bzw.
a11x1 + ...+ a1nxn = b1
......
ai1x1 + ...+ ainxn = bi...
...
am1x1 + ...+ amnxn = bm.
Definition 4.17. Los(A, b) := x |Ax = b heißt die Losungsmenge vonAx = b.
Wir definieren nun folgende elementare Zeilentransformationen fur
(E1) Multiplikation der i-ten Zeile mit c 6= 0:
a11x1 + ...+ a1nxn = b1
......
cai1x1 + ...+ cainxn = cbi...
...
am1x1 + ...+ amnxn = bm.
Dies entspricht gerade dem System TE1Ax = TE1b mit der Transforma-tionsmatrix
TE1 =
1 ... 0 ... 0.... . .
......
0 ... c ... 0...
.... . .
...0 ... 0 ... 1
i
78

(E2) Addition der i-ten Zeile zur j-ten Zeile:
a11x1 + ...+ a1nxn = b1
......
ai1x1 + ...+ ainxn = bi...
...
(aj1 + ai1)x1 + ...+ (ajn + ain)xn = bj + bi...
...
am1x1 + ...+ amnxn = bm.
Dies entspricht gerade dem System TE2Ax = TE2b mit der Transforma-tionsmatrix
TE2 =
1 ... 0 ... 0 ... 0.... . .
......
...0 ... 1 ... 0 ... 0...
.... . .
......
0 ... 1 ... 1 ... 0...
....... . .
...0 ... 0 ... 0 ... 1
i
j
(E3) Addition des c-fachen der i-ten Zeile zur j-ten Zeile:
a11x1 + ...+ a1nxn = b1
......
ai1x1 + ...+ ainxn = bi...
...
(aj1 + cai1)x1 + ...+ (ajn + cain)xn = bj + cbi...
...
am1x1 + ...+ amnxn = bm.
Dies entspricht gerade dem System TE3Ax = TE3b mit der Transforma-
79

tionsmatrix
TE3 =
1 ... 0 ... 0 ... 0.... . .
......
...0 ... 1 ... 0 ... 0...
.... . .
......
0 ... c ... 1 ... 0...
....... . .
...0 ... 0 ... 0 ... 1
i
j
(E4) Vertauschung der i-ten Zeile mit der j-ten Zeile:
a11x1 + ...+ a1nxn = b1
......
aj1x1 + ...+ ajnxn = bj...
...
ai1x1 + ...+ ainxn = bi...
...
am1x1 + ...+ amnxn = bm.
Dies entspricht gerade dem System TE4Ax = TE4b mit der Transforma-tionsmatrix
TE4 =
1 ... 0 ... 0 ... 0.... . .
......
...0 ... 0 ... 1 ... 0...
.... . .
......
0 ... 1 ... 0 ... 0...
....... . .
...0 ... 0 ... 0 ... 1
i
j
Durch die elementaren Zeilentransformationen andert sich die Losungsmengenicht, d.h. fur alle T ∈ TE1, ..., TE4 gilt, dass x ∈ Los(A, b) genau dann,wenn x ∈ Los(TA, Tb). Klar ist sofort, dass x ∈ Los(A, b)→ x ∈ Los(TA, Tb).Doch auch die umgekehrte Richtung wird sofort klar, wenn man beachtet,dass die elementaren Transformationsmatrizen invertierbar sind. Es gilt of-
80

fenbar
T−1E1 =
1 ... 0 ... 0.... . .
......
0 ... 1c
... 0...
.... . .
...0 ... 0 ... 1
i
T−1E2 =
1 ... 0 ... 0 ... 0.... . .
......
...0 ... 1 ... 0 ... 0...
.... . .
......
0 ... −1 ... 1 ... 0...
....... . .
...0 ... 0 ... 0 ... 1
i
j
T−1E3 =
1 ... 0 ... 0 ... 0.... . .
......
...0 ... 1 ... 0 ... 0...
.... . .
......
0 ... −c ... 1 ... 0...
....... . .
...0 ... 0 ... 0 ... 1
i
j
T−1E4 = TE4.
Das Gaußsche Eliminationsverfahren uberfuhrt nun mit Hilfe elementarerZeilentransformationen das System Ax = b in ein System Ax = b, wobei dieMatrix A Zeilenstufenform besitzt, d.h.
A =
0 ... 0 | a1k1 ... ∗ ∗ ... ∗ ∗ ... ∗ ∗ ... ∗− − −
0 ... 0 0 ... 0 | a2k2 ... ∗ ∗ ... ∗ ∗ ... ∗− − −
... |− − −
0 ... 0 0 ... 0 0 ... 0 0 ... 0 | a`k` ... ∗− − −
0 ... 0 0 ... 0 0 ... 0 0 ... 0 0 ... 0...
...0 ... 0 0 ... 0 0 ... 0 0 ... 0 0 ... 0
(4.2)
81

Die Elemente aiki sind ungleich Null fur i = 1, ..., ` und heißen Pivotelemente.Um aus einer Matrix A ∈ M(m × n,K) eine Matrix in Zeilenstufenform zuerhalten, geht man wie folgt vor:
1. Setze i := 1 (Zeilenindex) und j := 1 (Spaltenindex).
2. Falls i = m und j = n, dann Stop.
3. Falls aij 6= 0, dann ”eliminiere xi aus den Gleichungen i+1, ...,m”, d.h.benutze die Transformation TE3 mit c = −akj
aijfur alle k = i + 1, ...,m.
Setze i := i+ 1, j := j + 1 und wiederhole Schritt 2.
4. Falls aij = 0, aber ein k ∈ i + 1, ...,m mit akj 6= 0 existiert, danntausche mittels Transformation TE4 die Gleichung i mit Gleichung kund gehe zu 2.
5. Falls akj = 0 fur alle k = i, ...,m, so setze j := j + 1 und gehe zu 2.
Anmerkung:
• Wir haben bei der Beschreibung des Eliminationsverfahrens stillschwei-gend nach jeder Transformation die Eintrage der transformierten Ma-trix wieder mit (aij) bezeichnet.
• Damit wir die Losungsmenge von Ax = b nicht andern, mussen wir dieTransformationen von A auch fur b vornehmen, d.h. nicht nur TA son-dern auch Tb berechnen. Dies realisiert man praktischer Weise, indemman die Matrix A′ := (A|b) transformiert, also jeweils TA′ berechnet.
Bemerkung: Sei A eine Matrix in Zeilenstufenform (4.2). Dann gilt fur dasLGS Ax = b:
• Es ist genau dann losbar, wenn bi = 0 fur alle i = `+ 1, ...,m.
• Die Losungen x lassen sich einfach durch Ruckwartseinsetzen in dieGleichungen `, `− 1, ..., 2, 1 bestimmen:
(i) Man wahlt xk`+1, ..., xn beliebig und bestimmt xk` aus der `-tenGleichung, d.h.
xk` =1
a`,k`(b` − a`,k`+1xk`+1 − ...− a`,nxn)
82

(ii) Man wahlt xk`−1+1, ..., xk`−1 beliebig und bestimmt xk`−1 aus der(`− 1)-ten Gleichung, d.h.
xk`−1=
1
a`−1,k`−1
(b`−1 − a`−1,k`−1+1xk`−1+1 − ...− a`−1,k`−1xk`−1).
(iii) Man setzt dies analog von unten nach oben bis zur 1. Zeile fort.
Beispiel: Wir wollen alle Losungen des LGSs
2x1 + x2 − x3 + x5 = 3
x1 − 2x2 + 2x3 − x4 = 0
4x1 − x4 = 3
x2 − x3 + 2x5 = 2
bestimmen. Wir haben
A′ = (A|b) =
2 1 −1 0 1 31 −2 2 −1 0 04 0 0 −1 0 30 1 −1 0 2 2
.
Als erstes haben wir a11 = 2 6= 0. Wir eliminieren nun die Nicht-Null-Elemente der 1. Spalte unterhalb von a11. Dies erreichen wir mit TE3, d.h.wir addieren das (−1
2)-fache der 1. Zeile zur 2. Zeile und wir addieren das
(−2)-fache der 1. Zeile zur 3. Zeile (kurz: Z2 → Z2− 12Z1 und Z3 → Z3−2Z1).
Wir erhalten so 2 1 −1 0 1 3
0 −52
52−1 −1
2−3
2
0 −2 2 −1 −2 −30 1 −1 0 2 2
Jetzt finden wir a22 = −5
26= 0 und eliminieren die Nicht-Null-Elemente der
2. Spalte unterhalb von a22. Dies erreichen wir wieder mittels TE3, genauermit Z3 → Z3 − 4
5Z2 und Z4 → Z4 + 2
5Z2:
2 1 −1 0 1 30 −5
252−1 −1
2−3
2
0 0 0 −15−8
5−9
5
0 0 0 −25
95
75
83

Jetzt ist a33 = 0 und auch alle Elemente unterhalb von a33. Daher wandernwir einfach in Zeile 3 zur nachsten Spalte, also Spalte 4.
2 1 −1 0 1 30 −5
252−1 −1
2−3
2
0 0 0 −15−8
5−9
5
0 0 0 −25
95
75
Wir sehen, dass a34 = −1
56= 0 und eliminieren nun alle Elemente der 4.
Spalte unterhalb von a34. Mittels Z4 → Z4 − 2Z3:2 1 −1 0 1 30 −5
252−1 −1
2−3
2
0 0 0 −15−8
5−9
5
0 0 0 0 5 5
Nun haben wir die Matrix A in Zeilenstufenform und wir mussen nur nochdas LGS
2x1 +x2 −x3 +x5 = 3−5
2x2 +5
2x3 −x4 −1
2x5 = −3
2
−15x4 −8
5x5 = −9
5
5x5 = 5
losen. Dies konnen wir ganz einfach Einsetzen von unten nach oben:Aus der 4. Gleichung folgt sofort
x5 = 1.
Dies setzen wir in die 3. Gleichung ein und erhalten
x4 = −5(−9
5+
8
5· 1) = 1.
Damit auch die 2. Gleichung erfullt ist, konnen wir x3 beliebig wahlen (etwax3 := a ∈ R) und es ergibt sich
x2 = −2
5(−3
2− 5
2a+ 1 +
1
2· 1) = a.
Schießlich ergibt aus der 1. Gleichung
x1 =1
2(3− a+ a− 1) = 1.
84

Somit lauten die Losungen unseres LGSs:
x =
1aa11
,
wobei a ∈ R beliebig ist. Dieses lineare Gleichungssystem hat offenbar un-endlich viele Losungen.Schauen wir uns noch ein weiteres Beispiel an:
x1 + 2x2 = 0
x1 − x2 = 2
2x1 − x2 = c
mit c ∈ R. Wir betrachten 1 2 01 −1 22 −1 c
Durch Elimination Z2 → Z2 − Z1 und Z3 → Z3 − 2Z1 erhalten wir 1 2 0
0 -3 20 −5 c
Die Elimination Z3 → Z3 − 5
3Z2 liefert 1 2 0
0 -3 20 0 c− 10
3
.
Dies entspricht dem LGS
x1 + 2x2 = 0
−3x2 = 2
0 = c− 10
3
Offenbar besitzt das LGS nur dann eine Losung, falls c = 103
. In diesem Falllautet die Losung (ermittelt durch Einsetzen von unten nach oben):
x2 = −2
3, x1 =
4
3.
85

Nach Konstruktion der Gaußschen Eliminationsverfahrens erhalten wir all-gemein folgenden Satz.
Lemma 4.18. Mit dem Gaußschen Eliminationsverfahren erhalt man einLGS Ax = b mit Los(A, b) = Los(A, b), wobei A = TA, b = T b und
T = T`T`−1 · · ·T2T1, Ti ∈ TE3, TE4 fur i = 1, ..., `.
Dabei besitzt A Zeilenstufenform.Zudem liefert das Gaußsche Eliminationsverfahren die Faktorisierung
A = LU mit L = T−11 T−1
2 · · ·T−1`−1T
−1` , U = A.
Somit konnen wir mit Hilfe des Gaußschen Eliminationsverfahrens jedes li-neare Gleichungssystem losen. Zudem ist sofort klar, dass ein LGS
Ax = b
mit A ∈M(m×n,K) in Zeilenstufenform fur beliebige rechte Seiten b genaudann eine eindeutige Losung besitzt, wenn m = n und
A =
a11 ∗ ... ∗ ∗0 a22 ... ∗ ∗...
.... . .
......
0 0 ... an−1,n−1 ∗0 0 ... 0 ann
(4.3)
mit aii 6= 0 fur alle i = 1, ..., n. Wir nennen eine solche Matrix auch obereDreiecksmatrix.
Aus Satz 4.16 folgt damit unmittelbar:
Satz 4.19. Eine Matrix A ist genau dann invertierbar, wenn A mittels Gauß-Algorithmus auf eine obere Dreiecksmatrix fuhrt, wobei die Diagonalelementeverschieden von Null sind.
Die Inverse einer invertierbaren Matrix lasst sich daher ganz leicht bestim-men: Sei A ∈M(n×n,K) invertierbar (man nennt solche Matrizen ubrigensauch regular und nicht invertierbare Matrizen singular). Dann gilt nachDefinition
AA−1 = I
Schreibt manA−1 =
(v1 v2 ... vn
),
86

d.h. v1,...,vn seien die Spaltenvektoren von A−1. Dann sind die vi gerade dieLosungen von
Avi = ei
mit dem i-ten Einheitsvektor ei fur i = 1, ..., n. Nun konnen wir also jedeSpalte von A−1 durch Losen eines LGSs bestimmen. Am schnellsten geht dies,wenn wir dies mit dem Gaußschen Eliminationsverfahren parallel berechnen,d.h. das Eliminationsverfahren nicht nur auf
(A|ei)
sondern gleich auf(A|I)
anwenden.
Beispiel:
A =
(1 23 4
)Wir schreiben zunachst (
1 2 1 03 4 0 1
).
Mittels Elimation Z2 → Z2 − 3Z1 erhalten wir(1 2 1 00 −2 −3 1
). (4.4)
Nun erhalt man durch Auflosen von(1 2 10 −2 −3
)und (
1 2 00 −2 1
)gerade die Vektoren von A−1, d.h.
A−1 =
(−2 1
32−1
2.
).
Den Prozess des Auflosens pro Spalte kann man sich erleichtern, indem manerneut einen Eliminationsprozess durchfuhrt, diesmal als Elimination vonunten nach oben, d.h. man beginnt rechts unten und erzeugt Nullen oberhalb
87

der Diagonalen durch geeignete Elimination. Gehen wir dazu nochmal zu(4.4) zuruck (
1 2 1 00 −2 −3 1
).
Mittels Elimination Z1 → Z1 + Z2 erhalten wir(1 0 −2 10 −2 −3 1
).
Multiplizieren wir nun noch die 2. Zeile mit −12, so dass links die Einheits-
matrix steht, so erhalten wir(1 0 −2 10 1 3
2−1
2
).
Offenbar erhalten wir auf diese Weise auf der rechten Seite genau die Inversevon A.
Der Gauß-Algorithmus ist auch sehr hilfreich zur Bestimmung des Rangeseiner Matrix.
Lemma 4.20. Die elementaren Zeilentransformationen (E1)-(E4) andernden Rang einer Matrix nicht.
Da die Zeilentransformationen nur Matrixmultiplikationen mit invertierbarenMatrizen T darstellen, folgt obiges Lemma sofort aus folgendem Hilfssatz.
Lemma 4.21. Sei A ∈ M(m × n,K) und seien T ∈ M(m × m,K) sowieS ∈M(n× n,K) invertierbar. Dann gilt
rank (TA) = rank (A) = rank (AS).
Beweis:
(i) Sei v1, ..., vk eine Basis von im A. Dann ist Tv1, ..., T vk offenbar einErzeugendensystem von im (TA), denn jedes w ∈ im (TA) lasst sichschreiben als
w = TAv = T (Av) = T (k∑i=1
civi) =k∑i=1
ci(Tvi).
Angenommen, Tv1, ..., T vk ware linear abhangig. Dann ware nachSatz 4.2 (iii) auch T−1(Tv1), ..., T−1(Tvk) = v1, ..., vk linear abhan-gig. Da dies aber nach Voraussetzung eine Basis ist, so ist Tv1, ..., T vklinear unabhangig und damit auch eine Basis von im (TA). Damit er-halten wir rank (TA) = k = rank (A).
88

(ii) Wir zeigen, dass im A = im (AS). Offenbar gilt stets im A ⊇ im (AS).Sei nun z ∈ im A beliebig. Dann existiert ein v mit z = Av und es giltz = AS(S−1v) ∈ im (AS). Somit gilt im A = im (AS) und daher auchrank (A) = rank (AS).
2
Fur eine beliebige Matrix A gilt also
rank (A) = rank (A),
wobei A die Matrix in Zeilenstufenform (4.2) ist, die sich mittels GA (Gauß-Algorithmus) ergibt. Offenbar sind die Spalten k1,...,k` von A linear un-abhangig und alle anderen Spalten von A Linearkombinationen der Spaltenk1,...,k`. Somit gilt
rank (A) = rank (A) = `.
Beispiel: Sei
A =
1 −1 0 02 −1 0 25 0 2 18 −2 2 3
Wir bringen nun die Matrix A mittels GA auf Zeilenstufenform:
A
Z2→Z2−2Z1
Z3→Z3−5Z1
Z4→Z4−8Z1
=⇒
1 −1 0 00 3 0 20 5 2 10 6 2 3
Z3→Z3−5Z2
Z4→Z4−6Z2
=⇒
1 −1 0 00 1 0 20 0 2 −90 0 2 −9
Z4→Z4−Z3=⇒
1 −1 0 00 1 0 20 0 2 −90 0 0 0
= A
Somit gilt rank (A) = rank (A) = 3.
Schließlich erhalten wir mit Hilfe des Gaußschen Eliminationsverfahrens auchnoch folgenden wichtigen Satz.
Satz 4.22. Sei A ∈M(m×n,K) beliebig. Dann stimmen Zeilenrang(A) undSpaltenrang(A) uberein.
89

Beweis: Sei A die Matrix in Zeilenstufenform (4.2), die sich mittels GAergibt. Wir wissen schon, dass rank (A) = `, d.h. Spaltenrang(A) = `.Offenbar sind aber auch die Zeilen 1, ..., ` linear unabhangig und damitZeilenrang(A) = `. Wenn wir nun noch beachten, dass A = TA, wobei Teine regulare Matrix ist, so erhalten wir mit nachfolgendem Lemma 4.23,dass
Spaltenrang(A) = rank (A) = rank (TA) = rank (A)
= Spaltenrang(A)
= Zeilenrang(A)
= Spaltenrang(AT )
= rank (AT ) = rank (ATT T ) = rank (AT )
= Zeilenrang(A).
2
Lemma 4.23. Seien A ∈M(m× n,K), B ∈M(n× k,K). Dann gilt
(i) (AB)> = B>A>
(ii) Falls A und B invertierbar sind, so ist auch AB invertierbar und esgilt (AB)−1 = B−1A−1.
(iii) Falls A invertierbar ist, so ist auch A> invertierbar und es gilt (A>)−1
=
(A−1)>
.
Beweis:
(i) Ubungsaufgabe
(ii) Sei M := B−1A−1. Dann erhalten wir
(AB)M = ABB−1A−1 = AInA−1 = AA−1 = In
und
M(AB) = B−1A−1AB = B−1InB = B−1B = In.
(iii) Sei M := (A−1)>
. Dann haben wir unter Verwendung von (i), dass
A>M = A>(A−1)> = (A−1A)> = I>n = In
und
MA> = (A−1)>A> = (AA−1)> = I>n = In.
90

2
Wir kommen nochmal zur Losung linearer Gleichungssysteme zuruck undanalysieren die allgemeine Struktur des Losungsraumes Los(A, b).
Definition 4.24. Ein lineares Gleichungssystem Ax = b heißt homogen,falls b = 0. Andernfalls heißt es inhomogen.
Lemma 4.25. Sei A ∈M(m× n,K). Dann gilt
(i) Die Losungen des homogenen LGS Ax = 0 bilden einen Vektorraum.
(ii) Die Losungen des inhomogenen LGS Ax = b mit b 6= 0 bilden keinenVektorraum.
Beweis:
(i) Offenbar ist die Menge aller Losungen von Ax = 0 gerade der Kern vonA. Da ker(A) ein Vektorraum ist, so folgt die Behauptung.
(ii) Seien x1 und x2 Losungen von Ax = b. Dann gilt
A(x1 + x2) = Ax1 + Ax2 = b+ b = 2b.
Da b 6= 0, so gilt offenbar nicht A(x1 + x2) = b, d.h. x1 + x2 ist keineLosung von Ax = b.
2
Satz 4.26. (Losungsraumdarstellung linearer Gleichungssysteme)Sei A ∈M(m× n,K) und xs eine (spezielle) Losung von Ax = b. Dann gilt
Los(A, b) = x = xs + xh| xh ∈ kerA = xs + kerA.
Man definiert daher dimK Los(A, b) := dimK kerA und erhalt dimK Los(A, b) =n− rankA.
Beweis:
(⊇) Sei x = xs + xh mit xh ∈ kerA. Dann gilt
Ax = A(xs + xh) = Axs + Axh = b+ 0 = b.
(⊆) Sei Ax = b und xh := x− xs. Dann gilt
Axh = A(x−xs) = Ax−Axs = b−b = 0, d.h. xh ∈ kerA und x = xs+xh.
91
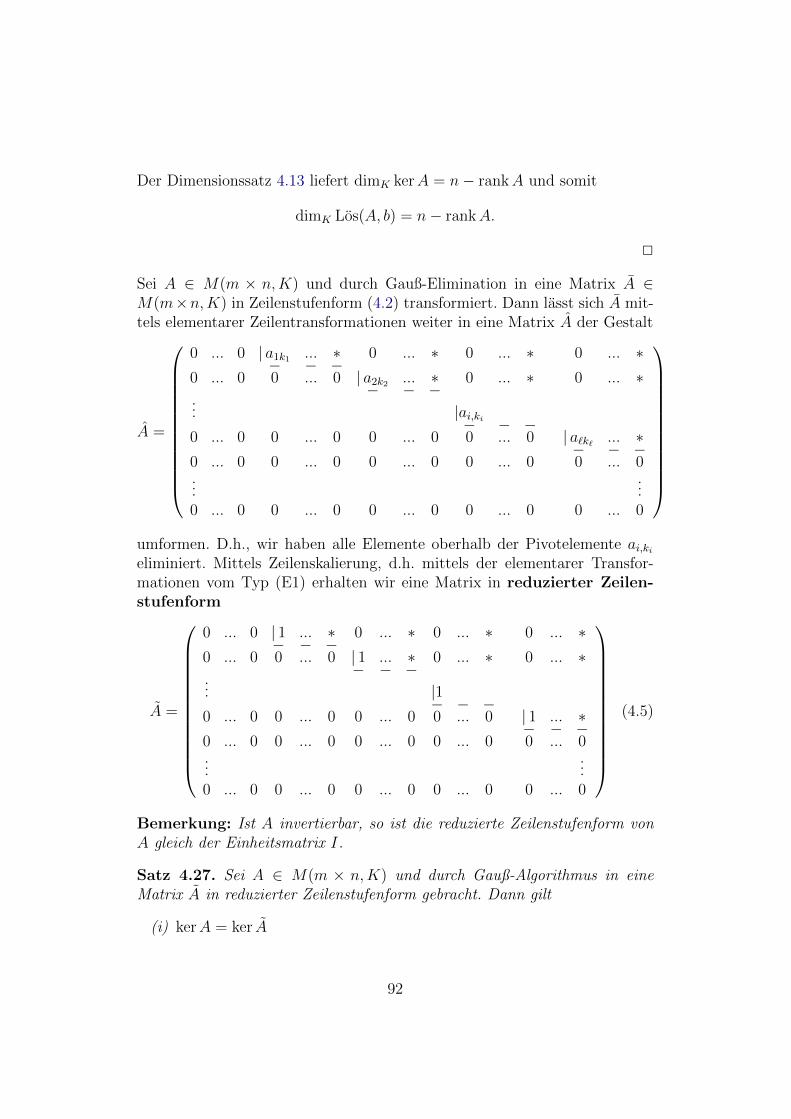
Der Dimensionssatz 4.13 liefert dimK kerA = n− rankA und somit
dimK Los(A, b) = n− rankA.
2
Sei A ∈ M(m × n,K) und durch Gauß-Elimination in eine Matrix A ∈M(m×n,K) in Zeilenstufenform (4.2) transformiert. Dann lasst sich A mit-tels elementarer Zeilentransformationen weiter in eine Matrix A der Gestalt
A =
0 ... 0 | a1k1 ... ∗ 0 ... ∗ 0 ... ∗ 0 ... ∗− − −
0 ... 0 0 ... 0 | a2k2 ... ∗ 0 ... ∗ 0 ... ∗− − −
... |ai,ki− − −0 ... 0 0 ... 0 0 ... 0 0 ... 0 | a`k` ... ∗
− − −0 ... 0 0 ... 0 0 ... 0 0 ... 0 0 ... 0...
...0 ... 0 0 ... 0 0 ... 0 0 ... 0 0 ... 0
umformen. D.h., wir haben alle Elemente oberhalb der Pivotelemente ai,kieliminiert. Mittels Zeilenskalierung, d.h. mittels der elementarer Transfor-mationen vom Typ (E1) erhalten wir eine Matrix in reduzierter Zeilen-stufenform
A =
0 ... 0 | 1 ... ∗ 0 ... ∗ 0 ... ∗ 0 ... ∗− − −
0 ... 0 0 ... 0 | 1 ... ∗ 0 ... ∗ 0 ... ∗− − −
... |1− − −
0 ... 0 0 ... 0 0 ... 0 0 ... 0 | 1 ... ∗− − −
0 ... 0 0 ... 0 0 ... 0 0 ... 0 0 ... 0...
...0 ... 0 0 ... 0 0 ... 0 0 ... 0 0 ... 0
(4.5)
Bemerkung: Ist A invertierbar, so ist die reduzierte Zeilenstufenform vonA gleich der Einheitsmatrix I.
Satz 4.27. Sei A ∈ M(m × n,K) und durch Gauß-Algorithmus in eineMatrix A in reduzierter Zeilenstufenform gebracht. Dann gilt
(i) kerA = ker A
92

(ii) Die Menge B := vj| j /∈ k1, ..., k` mit
(vj)k =
1, falls k = j
0, falls k 6= j und k /∈ k1, ..., k`−amj, falls k = km und m ∈ 1, ..., `
bildet eine Basis von kerA = ker A.
Beweis:
(i) Aufgrund von Lemma 4.18 wissen wir, dass Los(A, 0) = Los(A, 0), d.h.kerA = ker A.
(ii) Da A in reduzierter Zeilenstufenform vorliegt, so gilt fur die Eintragein den Spalten k1, ..., k`, dass
aikm =
1, falls i = m
0, falls i 6= m
Wir zeigen nun, dass vj ∈ kerA fur alle Vektoren vj von B. NachDefinition der Vektoren von B erhalten wir fur den i-ten Eintrag vonAvj
(Avj)i =n∑k=1
aik(vj)k
= aij · 1 +n∑k=1
k 6=j,k/∈k1,...,k`
aik · 0 +∑m=1
aikm · (−amj)
= aij + 0 + [1 · (−aij) +∑m=1m 6=i
0 · (−amj)]
= aij − aij = 0.
Nach Satz 4.13 wissen wir, dass dimK ker A = n − rank (A). Zudemsieht man sofort, dass rank (A) = `, wenn man beachtet, dass derSpaltenrang stets gleich dem Zeilenrang einer Matrix ist. Somit giltdimK ker A = n− `. Außerdem besitzt B per Konstruktion genau n− `Vektoren. Somit ist B eine Basis von ker A.
2
93

Beispiel: Sei
A =
1 2 0 4 5 0 0 8− −0 0 | 1 3 -1 0 0 -2
− − −0 0 0 0 0 | 1 0 -3
−0 0 0 0 0 0 | 1 4
− −0 0 0 0 0 0 0 0
Dann bildet die Menge
B = v2, v4, v5, v8 =
∗1∗00∗∗0
,
∗0∗10∗∗0
,
∗0∗01∗∗0
,
∗0∗00∗∗1
mit Avj = 0 fur j ∈ 2, 4, 5, 8 eine Basis von ker A. Dies beruht darauf,dass die Komponenten x2, x4, x5 und x8 frei wahlbar sind, wahrend dieKomponenten zu den Spalten mit den fuhrenden Einsen von A (hier x1, x3,x6 und x7) eindeutig bestimmt sind (in Abhangigkeit von der Wahl von x2,x4, x5 und x8).Dabei sind die ∗-Eintrage aus der Matrix A gerade die fett gedruckten Ein-trage von A mit einem Minus davor:
B =
-21000000
,
-40-310000
,
-50101000
,
-802003-41
.
Nun wissen wir mit Satz 4.26 und Lemma 4.27, wie wir alle Losungen einesbeliebigen linearen Gleichungssystems bestimmen konnen.
Beispiel: Wir suchen alle Losungen x des Systems Ax = b mit
A =
1 2 0 40 1 −1 02 0 3 1
, b =
822
.
94

Wir transformieren das System mittels GA in Zeilenstufenform: 1 2 0 4 80 1 −1 0 22 0 3 1 2
Z3→Z3−2Z1⇒
1 2 0 4 80 1 −1 0 20 −4 3 −7 −14
Z3→Z3+4Z2⇒
1 2 0 4 80 1 −1 0 20 0 −1 −7 −6
Nun transformieren wir es mit dem GA von unten nach oben in reduzierteZeilenstufenform: 1 2 0 4 8
0 1 −1 0 20 0 −1 −7 −6
Z3→−Z3⇒
1 2 0 4 80 1 −1 0 20 0 1 7 6
Z2→Z2+Z3⇒
1 2 0 4 80 1 0 7 80 0 1 7 6
Z1→Z1−2Z2⇒
1 0 0 -10 −80 1 0 7 80 0 1 7 6
Damit erhalten wir als spezielle Losung (die frei wahlbaren Komponenten -hier nur x4 - werden auf Null gesetzt):
xs =
−8860
und den Nullraum (hier wird die frei wahlbare Komponente x4 auf Einsgesetzt)
kerA = L(
10-7-71
).Alle Losungen x haben also die Form
x =
−8860
+ c
10−7−71
mit c ∈ R.
95

Der nachste Satz gibt noch Auskunft daruber, wann ein Gleichungssystemuberhaupt eine Losung besitzt.
Satz 4.28. (Losbarkeitskriterium) Sei A ∈ M(m × n,K) und b ∈ Km.Dann besitzt das LGS Ax = b genau dann eine Losung x ∈ Kn, wennrank (A | b) = rank (A).
Beweis: Der Vektor x ist eine Losung von Ax = b genau dann, wenn
b ∈ L(a1, ..., an),
wobei a1, ..., an die Spaltenvektoren von A sind. Dies ist aber aquivalent dazu,dass
L(a1, ..., an) = L(a1, ..., an, b),d.h. im A = im (A | b). Da fur alle z ∈ Kn
Az =(A b
)(z0
)gilt, so wissen wir, dass stets im A ⊆ im (A | b). Somit gilt im A = im (A | b)genau dann, wenn dimK(im A) = dimK(im (A | b)), d.h.
rank (A) = rank (A | b).
2
Beispiel: Wir suchen alle Losungen b ∈ R3, so dass das System Ax = b mit
A =
1 −1 1 01 1 −1 23 1 −1 4
losbar ist.
Wir transformieren das System (A | b) mittels GA in Zeilenstufenform: 1 −1 1 0 b1
1 1 −1 2 b2
3 1 −1 4 b3
Z2→Z2−Z1⇒
1 −1 1 0 b1
0 2 −2 2 b2 − b1
3 1 −1 4 b3
Z3→Z3−3Z1⇒
1 0 1 0 b1
0 2 −2 2 b2 − b1
0 4 −4 4 b3 − 3b1
Z3→Z3−2Z2⇒
1 0 1 0 b1
0 1 −3 2 b2 − b1
0 0 0 0 b3 − b1 − 2b2
96

Offenbar gilt rank (A | b) = rank (A) genau dann, wenn b3 − b1 − 2b2 = 0.
Bemerkung: Sei A ∈ M(m× n,K). Man kann eine Basis von im A leichtdadurch bestimmen, dass man die Matrix A mit Hilfe von Spalteneliminationund Vertauschung von Spalten in Spaltenstufenform bringt. Eine Spalten-elimination von A entspricht gerade einer Zeilenelimination von AT. MitSpaltenstufenform A ist gemeint, dass AT Zeilenstufenform besitzt. Schließ-lich bilden alle Nicht-Null-Spalten von A in Spaltenstufenform eine Basis vonim A.
Beispiel: Wir suchen eine Basis von im A mit
A =
1 −1 1 01 1 −1 23 1 −1 4
Wir transformieren das System (A | b) mittels GA fur die Spalten in Spalten-stufenform: 1 −1 1 0
1 1 −1 23 1 −1 4
S2→S2+S1⇒
1 0 1 01 2 −1 23 4 −1 4
S3→S3−S1⇒
1 0 0 01 2 −2 23 4 −4 4
S3→S3+S2, S4→S4−S2⇒
1 0 0 01 2 0 03 4 0 0
Somit ist
113
,
024
eine Basis von im A.
4.4 Darstellungsmatrizen und Basiswechsel
Matrizen sind nicht nur ein bequemes Mittel zur Beschreibung linearer Ab-bildungen vom Kn in den Km. Man kann sie auch fur beliebige lineare Ab-bildungen in Vektorraumen nutzen.
97

Satz 4.29. Seien V , W zwei K-Vektorraume. Sei weiter A = v1, ..., vneine Basis von V und B = w1, ..., wm eine Basis von W . Dann gibt es zujedem f ∈ HomK(V,W ) genau eine Matrix Mf = (aij) ∈ M(m × n,K), sodass
f(vj) =m∑i=1
aijwi ∀ j = 1, ..., n.
Die dadurch definierte Abbildung
MAB : HomK(V,W )→M(m× n,K)
f 7→Mf
ist ein Isomorphismus. Man nennt MAB (f) die Abbildungsmatrix oder die
Darstellungsmatrix von f bezuglich der Basen A und B.
Beweis: Sei f ∈ HomK(V,W ). Da B eine Basis ist, so sind die Koeffizientenaij eindeutig durch f(vj) festgelegt und damit ist die Matrix Mf wohldefi-niert. Wir zeigen die Behauptung in 3 Schritten:
(i) MAB ist linear, (ii) MA
B ist injektiv, (iii) MAB ist surjektiv.
zu (i) Sei λ ∈ K. Dann haben wir fur (cij) := MAB (λf), dass
m∑i=1
cijwi = (λf)(vj) = λf(vj) = λm∑i=1
aijwi =m∑i=1
(λaij)wi,
d.h. MAB (λf) = λMA
B (f). Sei nun g ∈ HomK(V,W ) und Mg = (bij) diezugehorige Darstellungsmatrix. Dann gilt fur (cij) := MA
B (f + g), dass
m∑i=1
cijwi = (f + g)(vj) = f(vj) + g(vj)
=m∑i=1
aijwi +m∑i=1
bijwi =m∑i=1
(aij + bij)wi,
d.h. MAB (f + g) = MA
B (f) +MAB (g).
zu (ii) Sei MAB (f) = MA
B (g). Da MAB linear ist, so heißt dies, dass
MAB (f − g) = 0,
d.h. fur alle j = 1, ..., n gilt (f − g)(vj) = O. Dies bedeutet
∀ j = 1, ..., n : f(vj) = g(vj).
Da f und g linear sind und A = v1, ..., vn eine Basis von V ist, so giltf = g.
98

zu (iii) Sei (aij) ∈M(m× n,K) gegeben. Dann definieren wir eine Abbildungf : V → W wie folgt: Sei v =
∑nj=1 cjvj ∈ V beliebig und
f(v) :=n∑j=1
cj
m∑i=1
aijwi.
Dann gilt offenbar fur alle j = 1, ..., n, dass
f(vj) :=m∑i=1
aijwi
und somit MAB (f) = (aij). Es bleibt zu zeigen, dass f linear ist. Sei
λ ∈ K. Dann gilt:
f(λv) =n∑j=1
(λcj)n∑j=1
aijwi = λn∑j=1
cj
n∑j=1
aijwi = λf(v).
Sei v =∑n
j=1 cjvj ∈ V . Dann haben wir
f(v + v) =n∑j=1
(cj + cj)n∑j=1
aijwi
=n∑j=1
cj
n∑j=1
aijwi +n∑j=1
cj
n∑j=1
aijwi = f(v) + f(v).
2
Man kann also jede lineare Abbildung in endlich-dimensionalen Vektorraumenmit ihrer Abbildungsmatrix eindeutig identifizieren.
Beispiele:
1. Sei f : R3 → R2 definiert durch
f(
xyz
) =
(x+ 2y
3x+ y + 4z
)
Dann ergibt sich als Darstellungsmatrix MAB (f) fur die Standardbasen
A :=
100
,
010
,
001
, B := (
10
),
(01
)
99

gerade
MAB (f) =
(1 2 03 1 4
).
Fur die Basen
A :=
112
,
103
,
020
, B := (
21
),
(11
)
erhalten wir
f(
112
) =
(312
)= −9
(21
)+ 21
(11
),
f(
103
) =
(115
)= −14
(21
)+ 29
(11
),
f(
020
) =
(42
)= 2
(21
)+ 0
(11
).
und somit
MAB (f) =
(−9 −14 221 29 0
).
2. Die identische Abbildung f : V → V mit f(v) = v ergibt fur jede BasisB von V mit dimK(V ) = n als darstellende Matrix die Einheitsma-trix (engl.: identity matrix)
MBB (f) =
1 0 ... 00 1 ... 0...
.... . .
...0 0 ... 1
︸ ︷︷ ︸
n Spalten
=: I.
3. Sei f : Kn[x]→ Kn−1[x] die lineare Abbildung mit f(p) = p′, d.h.
p′[x] = a1 + a2x+ ...+ anxn−1 fur p[x] = a0 + a1x+ ...+ anx
n,
wobei Kn[x] die Menge aller Polynome vom Grad ≤ n mit Koeffizientenaus K ist. Wir betrachten nun die Basen
A = 1, x, x2, ..., xn, B = 1, x, x2, ..., xn−1.
100

Dann erhalten wir
f(1) = 0, f(x) = 1, f(x2) = 2x, f(x3) = 3x2, ..., f(xn) = nxn−1
und somit
MAB (f) =
0 1 0 0 ... 00 0 2 0 ... 00 0 0 3 ... 0...
......
......
0 0 0 0 ... n
.
Satz 4.30. Seien V , W zwei K-Vektorraume und f ∈ HomK(V,W ). SeienA = v1, ..., vn, B = w1, ..., wm Basen von V bzw. W . Dann gilt:
(i) f ist ein Monomorphismus ⇔ rank (MAB (f)) = n.
(ii) f ist ein Epimorphismus ⇔ rank (MAB (f)) = m.
(iii) f ist ein Isomorphismus ⇔ rank (MAB (f)) = m = n.
Beweis: Wir zeigen, dass rank (f) = rank (MAB (f)). Dann folgt aus Satz 4.13
(Dimensionssatz fur lineare Abbildungen), dass def(f) = n − rank (MAB (f))
und damit alle Behauptungen des Satzes. Man beachte, dass def(f) = 0 furMonomorphismen und rank (f) = m fur Epimorphismen.Es gilt
rank (f) = dimK(im (f)) = dimK L(f(v1), ..., f(vn)) (4.6)
und außerdem fur MAB (f) = (aij)
rank (MAB (f)) = dimK L(
a11
...am1
, ...,
a1n
...amn
)= dimK L(ϕB(f(v1)), ..., ϕB(f(vn))) (4.7)
wobei ϕB : W → Km die Koordinatenabbildung ist. Da die Koordinatenab-bildung ϕB linear und bijektiv (also ein Isomorphismus) ist, so gilt mit Satz4.8, dass
dimK L(ϕB(f(v1)), ..., ϕB(f(vn))) = dimK L(f(v1), ..., f(vn))Setzen wir nun (4.6) und (4.7) ein, so ergibt sich die Behauptung. 2
Bemerkung: Man merke sich: Fur lineare Abbildungen f ∈ HomK(V,W )gilt
rank (f) = rank (MAB (f)).
101

Satz 4.31. Sei A ∈M(m× n,K).
(i) A besitzt eine rechtsinverse Matrix genau dann, wenn rank (A) = m.
(ii) A besitzt eine linksinverse Matrix genau dann, wenn rank (A) = n.
(iii) A besitzt eine inverse Matrix genau dann, wenn rank (A) = m = n.
Beweis: Sei f : Kn → Km die lineare Abbildung x 7→ Ax.
1. Wenn A eine rechtsinverse Matrix B besitzt, dann ist f ein Epimorphis-mus, denn fur alle w ∈ Km gilt: w = ABw = Av fur v := Bw ∈ Kn.Wenn f ein Epimorphismus ist, dann besitzt A eine rechtsinverse Ma-trix B ∈ M(n × m,K). Denn fur jedes ei ∈ Km der Standardbasise1, ..., em von Km finden wir ein vi ∈ Kn mit ei = f(vi). Nun stellenwir jedes vi in der Standardbasis e1, ..., en von Kn dar, d.h.
vi =n∑j=1
vjiej.
Fur B := (vji) j=1,...,ni=1,...,m
gilt nun fur alle i = 1, ...,m:
ABei = An∑j=1
vjiej = Avi = f(vi) = ei
und somit AB = Im.
2. Wenn A eine linksinverse Matrix B besitzt, dann ist f ein Monomor-phismus, denn fur alle v ∈ Kn mit f(v) = Av = 0 gilt: v = BAv = 0.Wenn f ein Monomorphismus ist, dann besitzt A eine linksinverse Ma-trix B. Denn dann ist w1, ..., wn mit wi := f(ei), i = 1, ..., n linearunabhangig und wir konnen diese zu einer Basis w1, ..., wm von Km
erganzen. Die Basisdarstellung
ej =m∑i=1
bijwi ∈ Km ∀j = 1, ...,m (4.8)
liefert uns ein B = (bij) i=1,...,nj=1,...,m
mit
BAei = Bf(ei) = Bwi = ei ∀ i = 1, ..., n.
102

Die letzte Gleichung ist klar, wenn man beachtet, dass mit der Basis-darstellung wi =
∑mk=1 wkiek aus (4.8) folgt:
m∑k=1
bjkwki = δji :=
1, falls i = j
0, sonst
und somit
Bwi = B(m∑k=1
wkiek) =m∑k=1
wkiBek =m∑k=1
wki
n∑j=1
bjkej =n∑j=1
δjiej = ei.
Schließlich erhalten wir BA = In.
Die Behauptung folgt nun unmittelbar aus Satz 4.30. 2
4.5 Spezielle Klassen quadratischer Matrizen
Definition 4.32. Sei K ein Korper der Charakteristik 0 (z.B. R, C oder Q).Sei A = (aij) ∈M(n× n,K). Dann heißt A
(i) symmetrisch, falls A = AT.
(ii) obere Dreiecksmatrix, falls aij = 0 fur i > j.
(iii) untere Dreiecksmatrix, falls aij = 0 fur i < j.
(iv) Diagonalmatrix, falls aij = 0 fur i 6= j.
(v) Permutationsmatrix, falls in jeder Spalte und in jeder Zeile von Agenau eine Eins und ansonsten Nullen stehen.
(vi) Projektor, falls A2 = A.
(vii) nilpotent, falls es ein k ∈ N gibt, so dass Ak = 0. Die kleinstenaturliche Zahl k mit dieser Eigenschaft heißt der Nilpotenzindex vonA.
(viii) hermitesch, falls K = C und A = AT, wobei A = (aij) die konjugiertkomplexe Matrix von A ist.
(ix) fur K = R:
• positiv definit, falls xTAx > 0 fur alle x ∈ Rn\0,• positiv semidefinit, falls xTAx ≥ 0 fur alle x ∈ Rn,
103

• negativ definit, falls xTAx < 0 fur alle x ∈ Rn\0,• negativ semidefinit, falls xTAx ≤ 0 fur alle x ∈ Rn.
Beispiele:
(i) A =
1 2 32 4 53 5 6
ist symmetrisch.
(ii) A =
1 4 50 2 30 0 7
ist eine obere Dreiecksmatrix.
(iii) A =
1 0 07 4 08 2 6
ist eine untere Dreiecksmatrix.
(iv) A =
3 0 00 5 00 0 4
ist eine Diagonalmatrix.
(v) A =
0 1 00 0 11 0 0
ist eine Permutationsmatrix.
(vi) A =
1 0 00 0.5 0.50 0.5 0.5
ist ein Projektor.
(vii) A =
0 1 00 0 10 0 0
ist eine nilpotente Matrix mit Nilpotenzindex 3.
(viii) A =
1 1 + i 2− 3i1− i 4 5 + 2i2 + 3i 5− 2i 6
ist hermitesch.
(ix) A =
3 0 −22 3 00 −4 5
ist eine positiv definite Matrix, denn
xTAx = x1(3x1 − 2x3) + x2(2x1 + 3x2) + x3(−4x2 + 5x3)
= 3x21 + 3x2
2 + 5x23 − 2x1x3 + 2x1x2 − 4x2x3
= (x1 + x2)2 + (x1 − x3)2 + (x2 − 2x3)2 + x21 + x2
2 + x23 ≥ 0.
104

Die Summe ist offenbar nur gleich Null, falls alle Summanden gleichNull sind, d.h. falls x = 0.
Satz 4.33. Sei K ein Korper der Charakteristik 0. Dann gilt
(i) M(n×n,K) ist ein nicht kommutativer Ring mit Eins, wobei die Einsgleich der Einheitsmatrix ist.
(ii) (GLn(K), ·) ist eine nicht kommutative Gruppe fur
GLn(K) := M ∈M(n× n,K) | M regular.
(iii) (G , ·) ist eine nicht kommutative Gruppe fur
G := M ∈M(n× n,K) | M regular und obere Dreiecksmatrix.
(G , ·) ist eine nicht kommutative Gruppe fur
G := M ∈M(n× n,K) | M obere Dreiecksmatrix,
∀i = 1, ..., n : mii = 1.
(iv) (G , ·) ist eine nicht kommutative Gruppe fur
G := M ∈M(n× n,K) | M regular und untere Dreiecksmatrix.
(G , ·) ist eine nicht kommutative Gruppe fur
G := M ∈M(n× n,K) | M untere Dreiecksmatrix,
∀i = 1, ..., n : mii = 1.
(v) (GD, ·) ist eine kommutative Gruppe fur
GD := D ∈M(n× n,K) | D regular und Diagonalmatrix.
(vi) (GP , ·) ist eine nicht kommutative Gruppe fur
GP := P ∈M(n× n,K) | P Permutationmatrix.
Falls P eine Permutationsmatrix ist, so gilt PT = P−1.
Bemerkung 4.34. Die Menge der Projektoren, die Menge der nilpotentenMatrizen, die Menge der hermiteschen Matrizen und die Menge der positivdefiniten Matrizen bilden keine Gruppe bezuglich der Multiplikation, auchkeine Halbgruppe.
105

Beweis:
(i) Wir zeigen zuerst, dass (M(n× n,K),+) eine abelsche Gruppe ist.
(a) Per Def. gilt fur A,B ∈M(n× n,K) auch A+B ∈M(n× n,K).
(b) Die Assoziativitat folgt direkt aus der Assoziativitat der Additionin K.
(c) Das neutrale Element ist offenbar die Null-Matrix, d.h. die MatrixN ∈M(n× n,K), fur die alle Eintrage gleich Null sind.
(d) Das inverse Element von A = (aij) ∈ M(n × n,K) bezuglich derAddition ist offenbar −A = (−aij) ∈M(n× n,K).
Wir zeigen nun, dass (M(n× n,K), ·) eine Halbgruppe ist.
(a) Per Def. gilt fur A,B ∈M(n× n,K) auch A ·B ∈M(n× n,K).
(b) Fur den Nachweis der Assoziativitat seien A, B, C ∈M(n×n,K).Dann gilt fur D := A ·B und E := B · C, dass
dil =n∑k=1
aikbkl, ekj =n∑l=1
bklclj
und somit fur
F := D · C = (A ·B) · C, G := A · E = A · (B · C),
dass
fij =n∑l=1
dilclj =n∑l=1
n∑k=1
(aikbkl)clj
und
gij =n∑k=1
aikekj =n∑k=1
n∑l=1
aik(bklclj)
Da die Multiplikation in K assoziativ und die Addition in K kom-mutativ ist, so folgt damit F = G.
(c) Das neutrale Element ist offenbar die Einheitsmatrix In.
Schließlich zeigen wir noch die Distributivitat. Seien A, B, C ∈M(n×n,K). Dann gilt fur D := A · (B + C) und E := A ·B + A · C, dass
dij =n∑k=1
aik(bkj + ckj), eij =n∑k=1
aikbkj +n∑k=1
aikckj.
106

Damit haben wir A · (B + C) = D = E = A · B + A · C. Analoggilt (A + B) · C = A · C + B · C. Da die Matrixmultiplikation nichtkommutativ ist, haben wir also einen nicht kommutativen Ring.
(ii) Wegen (i) mussen wir nur zeigen, dass AB fur A,B ∈ GLn(K) regularist und die Multiplikation regularer Matrizen nicht kommutativ ist.Letzteres ist klar fur
A =
(1 20 1
), B =
(1 03 1
),
da
AB =
(7 23 1
)6= BA =
(1 23 7
).
Seien nun A,B ∈ GLn(K) beliebig. Wir definieren C := B−1A−1 undsehen, dass
(AB)C = (AB)B−1A−1 = A(BB−1)A−1 = AIA−1 = AA−1 = I
und
C(AB) = B−1A−1(AB) = B(AA−1)B−1 = BIB−1 = BB−1 = I,
d.h. C ist die Inverse von AB.
(iii) Seien A = (aij), B = (bjk) ∈ G und C = (cik) := AB. Dann ist Cwegen (ii) regular und es gilt fur i < k, dass
cik =n∑j=1
aijbjk =k−1∑j=1
aijbjk +n∑j=k
aijbjk =k−1∑j=1
aij · 0 +n∑j=k
0 · bjk = 0,
d.h. C ∈ G . Die Nicht-Kommutatitivitat sieht man z.B. fur
A =
1 1 00 1 10 0 1
, B =
1 3 20 1 00 0 1
,
da
AB =
1 4 20 1 10 0 1
6= BA =
1 4 50 1 10 0 1
.
Die Inverse von einer regularen oberen Dreiecksmatrix erhalt man durchLosung der Gleichungen
Axj = ej fur alle j = 1, ..., n.
107

durch Ruckwartseinsetzen. Dann sieht man leicht, dass fur die Elementexij des Vektors xj gilt, dass xij = 0 fur i > j. Zugleich wird dabei klar,dass xjj = 1, falls ajj = 1. Da A−1 gerade die Spalten xj besitzt, so istA wieder eine obere Dreiecksmatrix. Zudem sind die Eintrage von A−1
auf der Hauptdiagonalen gleich Eins, falls die Eintrage von A auf derHauptdiagonalen gleich Eins sind.
(iv) analog zu (iii)
(v) Seien A = (aij), B = (bjk) ∈ GD. Seien weiter C = (cik) := AB undD = (dik) := BA. Dann sind C und D wegen (ii) regular und es giltfur i 6= k, dass
cik =n∑j=1
aijbjk = aiibik = 0,
da aij = 0 fur i 6= j und bik = 0. Analog gilt dik = 0 fur i 6= k. Zudemgilt fur D = (dik) := BA, dass
dii =n∑j=1
bijaji = biiaii = aiibii =n∑j=1
aijbji = cii.
Somit haben wir D = C. Schließlich gilt A−1 = (cij) mit cii = a−1ii und
cij = 0 fur i 6= j, wenn A = (aij) invertierbar ist.
(vi) Seien A = (aij) und B = (bjk) Permutationsmatrizen. Sei C = (cik) :=AB. Sei i fest gewahlt. Dann existiert ein ji, so dass aiji = 1 und aij = 0fur alle j 6= ji. Somit gilt
cik =n∑j=1
aijbjk = aijibjik = bjik.
Nun existiert genau ein ki so, dass bjiki = 1, ansonsten gilt bjik = 0fur k 6= ki. D.h. in der i-ten Zeile von C = AB steht genau eine Eins,ansonsten Nullen. Analog zeigt man, dass jede Spalte genau eine Einsenthalt, ansonsten Nullen. Somit ist AB auch eine Permutationsmatrix.Zudem gilt fur (dik) = ATA, dass
dik =n∑j=1
aijakj = aijiakjk =
1 fur i = k
0 fur i 6= k,
d.h. ATA = I und analog auch AAT = I, d.h. AT = A−1. Da AT aucheine Permutationsmatrix ist, so gilt dies auch fur A−1.
2
108

5 Determinanten
5.1 Multilineare Abbildungen
Seien im folgenden n ≥ 1 und V1, V2, ..., Vn sowie W Vektorraume ubereinem Korper K.
Definition 5.1. Eine Abbildung f : V1 × V2 × ...× Vn → W heißt n-linearoder multilinear, falls f in jedem Argument linear ist, d.h. fur alle 1 ≤ i ≤n und fur alle (v1, ..., vn) ∈ V1 × V2 × ...× Vn gilt:
f(v1, ..., aui + bvi, ..., vn) = af(v1, ..., ui, ..., vn) + bf(v1, ..., vi, ..., vn),
falls ui ∈ Vi und a, b ∈ K. Zudem definieren wir
L(V1, ..., Vn;W ) := f : V1 × V2 × ...× Vn → W | f ist multilinear.
Bemerkung:
1. Falls n = 1, so ist jede 1-lineare Abbildung eine lineare Abbildung undumgekehrt.
2. Falls n = 2, so sagt man anstelle von 2-linear auch bilinear.
3. Falls V1 = V2 = ... = Vn = V , so definieren wir
Ln(V,W ) := L(V, ..., V ;W ).
4. Falls V1 = V2 = ... = Vn = V und W = K, so nennt man eine n-lineare Abbildung eine n-Linearform oder Multilinearform aufV. Entsprechend heißen die bilinearen Abbildungen von V × V → KBilinearformen.
Beispiel: Sei K = R und V1 = V2 = Rk, W = R.
1. Die Abbildung f : R× R→ R mit
f(u, v) = u · v
ist bilinear, aber nicht linear.
2. Die Abbildung f : Rk × Rk → R mit
f(u, v) = u+ v
ist linear, aber nicht bilinear.
109

3. Das kanonische Skalarprodukt 〈·, ·〉 : Rk × Rk → R mit
〈u, v〉 := uTv =k∑j=1
ujvj
ist eine Bilinearform.
Satz 5.2. Sei fur jedes 1 ≤ j ≤ n die Menge Uj = u1j, u2j, ..., urjj ei-ne Basis von Vj. Dann sind zwei n-lineare Abbildungen f, g : V1 × ... ×Vn → W genau dann gleich, wenn ihre Funktionswerte fur alle Basistupel(ui11, ..., uinn) ∈ V1×...×Vn mit 1 ≤ i1 ≤ r1, ..., 1 ≤ in ≤ rn ubereinstimmen,d.h.
f(ui11, ..., uinn) = g(ui11, ..., uinn).
Beweis: Seif(ui11, ..., uinn) = g(ui11, ..., uinn)
fur alle Basistupel (ui11, ..., uinn) ∈ V1× ...× Vn mit 1 ≤ i1 ≤ r1, ..., 1 ≤ in ≤rn. Sei (v1, ..., vn) ∈ V1 × ... × Vn beliebig. Da Uj = u1j, u2j, ..., urjj eineBasis von Vj ist, so existieren Koeffizienten cij ∈ K, so dass
vj =
rj∑i=1
cijuij ∀ 1 ≤ j ≤ n.
Da f und g n-linear sind, so gilt
f(v1, ..., vn) = f(
r1∑i=1
ci1ui1, ...,rn∑i=1
cinuin)
= f(
r1∑i1=1
ci11ui11, ...,rn∑in=1
cinnuinn)
=
r1∑i1=1
...rn∑in=1
ci11...cinn f(ui11, ..., uinn)
=
r1∑i1=1
...rn∑in=1
ci11...cinn g(ui11, ..., uinn)
= g(
r1∑i1=1
ci11ui11, ...,rn∑in=1
cinnuinn) = g(v1, ..., vn).
2
110

5.2 Alternierende Abbildungen
Seien V und W K-Vektorraume.
Definition 5.3. Eine n-lineare Abbildung f ∈ Ln(V,W ) heißt alternie-rend, wenn fur alle v = (v1, ..., vn) ∈ V n = V × ...× V︸ ︷︷ ︸
n−mal
gilt:
f(v1, ..., vi, ..., vj, ..., vn) = 0, falls vi = vj und i 6= j.
Beispiel: Sei n = 2, V = R2, W = R. Dann ist f : R2 × R2 → R mit
f(u, v) = u1v2 − u2v1
alternierend, daf(u, u) = u1u2 − u2u1 = 0.
Definition 5.4. Eine n-lineare Abbildung f ∈ Ln(V,W ) heißt schiefsym-metrisch, wenn fur alle v = (v1, ..., vn) ∈ V n gilt:
f(v1, ..., vi, ..., vj, ..., vn) = −f(v1, ..., vj, ..., vi, ..., vn), falls i 6= j.
Beispiel: Sei wieder n = 2, V = R2, W = R und f : R2 × R2 → R mit
f(u, v) = u1v2 − u2v1.
Die Abbildung f ist auch schiefsymmetrisch, denn
f(u, v) = u1v2 − u2v1 = −(v1u2 − v2u1) = −f(v, u)
fur alle u, v ∈ R2.
Satz 5.5. Seien V , W Vektorraume uber einem Korper K und f ∈ Ln(V,W ).Dann gilt
(i) Wenn f alternierend ist, so ist f auch schiefsymmetrisch.
(ii) Wenn f schiefsymmetrisch und charK 6= 2, dann ist f auch alternie-rend.
Beweis:
111

(i) Sei f alternierend und v = (v1, ..., vn) ∈ V n. Dann gilt fur i < j, dass
f(v1, ..., vi, ..., vj, ..., vn)
= f(v1, ..., vi + vj, ..., vj, ..., vn)− f(v1, ..., vj, ..., vj, ..., vn)
= f(v1, ..., vi + vj, ..., vj, ..., vn)− 0
= f(v1, ..., vi + vj, ..., vj + vi, ..., vn)− f(v1, ..., vj, ..., vi, ..., vn)
= 0− f(v1, ..., vj, ..., vi, ..., vn) = −f(v1, ..., vj, ..., vi, ..., vn),
d.h. f ist schiefsymmetrisch.
(ii) Sei f schiefsymmetrisch und v = (v1, ..., vn) ∈ V n mit vi = vj furfixierte i < j. Dann gilt
2f(v1, ..., vi, ..., vj, ..., vn)
= f(v1, ..., vi, ..., vj, ..., vn) + f(v1, ..., vj, ..., vi, ..., vn)
= f(v1, ..., vi, ..., vj, ..., vn)− f(v1, ..., vi, ..., vj, ..., vn) = 0.
Da charK 6= 2, so ist f(v1, ..., vi, ..., vj, ..., vn) = 0, d.h. f ist schiefsym-metrisch.
2
Im Folgenden setzen wir stets voraus, dass K ein Korper mit charK 6= 2 ist.Somit ist alternierend gleichbedeutend mit schiefsymmetrisch.
Definition 5.6. Sei n ∈ N. Dann bezeichnen wir mit Sn die Menge allerPermutationen von 1, 2, ..., n, d.h. die Menge aller bijektiven Abbildungen
σ : 1, 2, ..., n → 1, 2, ..., n.
Lemma 5.7. Die Menge Sn bildet mit der Komposition von Abbildungeneine Gruppe. Fur n ≥ 3 ist die Gruppe nicht abelsch.
Beweis: Ubungsaufgabe 2
Definition 5.8. Sei σ ∈ Sn eine Permutation und
Fn(σ) = (i, j) | 1 ≤ i < j ≤ n ∧ σ(i) > σ(j)
die Menge ihrer Fehlstande. Dann heißt σ
• gerade, falls #Fn(σ) eine gerade Zahl ist,
• ungerade, falls #Fn(σ) eine ungerade Zahl ist.
112

Die Signum-Funktion sign : Sn → −1,+1 ist definiert als
sign (σ) =
+1 falls σ gerade,
−1 falls σ ungerade.
Beispiel: Wir betrachten die Permutation(1 2 3 4 5 62 6 1 4 5 3
)Dann ist die Menge aller Fehlstande
F6(σ) = (1, 3), (2, 3), (2, 4), (2, 5), (2, 6), (4, 6), (5, 6).
Wir erhalten sign (σ) = (−1)7 = −1.
Lemma 5.9. Sei σ ∈ Sn eine Permutation. Dann gilt
sign (σ) =∏
1≤i<j≤n
σ(j)− σ(i)
j − i .
Beweis: Sei
f(i, j) :=σ(j)− σ(i)
j − i .
Dann gilt fur alle 1 ≤ i < j ≤ n:
f(i, j) =
−|f(i, j)|, falls (i, j) ∈ Fn(σ)
|f(i, j)|, falls (i, j) /∈ Fn(σ)
Somit erhalten wir
∏1≤i<j≤n
f(i, j) =
∏(i,j)∈Fn(σ)
f(i, j)
· ∏
(i,j)/∈Fn(σ)
f(i, j)
= (−1)k
∏(i,j)∈Fn(σ)
|f(i, j)|
· ∏
(i,j)/∈Fn(σ)
|f(i, j)|
= (−1)k
∏1≤i<j≤n
|f(i, j)|,
113

wobei k = #Fn(σ) und somit
∏1≤i<j≤n
f(i, j) = (−1)k
∏1≤i<j≤n
|σ(j)− σ(i)|∏1≤i<j≤n
|j − i| = (−1)k.
Der letzte Teil der Gleichung ergibt sich daraus, dass in Zahler und Nen-ner die gleichen Faktoren stehen (oben nur in der durch die Permutationvorgegebenen Reihenfolge). 2
Definition 5.10. Eine Permutation τ ∈ Sn heißt Transposition, falls sienur genau zwei Elemente von 1, 2, ..., n vertauscht und alle anderen Ele-mente fest bleiben, d.h. falls fur feste k 6= ` gilt:
τ(k) = `, τ(`) = k, τ(i) = i ∀i 6= k, `.
Beispiel: Die Permutation
τ :
(1 2 3 4 5 61 4 3 2 5 6
)ist eine Transposition.
Lemma 5.11. Jede Permutation σ ∈ Sn ist eine Komposition von Transpo-sitionen, d.h. es existieren Transpositionen τ1, ..., τk, so dass
σ = τ1 ... τk.
Diese Komposition ist nicht eindeutig.
Beweis: Ubungsaufgabe 2
Bemerkung 5.12. Aus der Definition erkennt man sofort, dass fur jedeTransposition τ ∈ Sn gilt:
τ 2 = τ τ = id, d.h. τ−1 = τ.
Zudem haben wir sign (τ) = −1 fur jede Transposition τ ∈ Sn, da
Fn(τ) = (i, j) ∪(
j−1⋃k=i+1
(i, k), (k, j)),
wenn τ die Elemente i und j mit i < j vertauscht.
114

Lemma 5.13. Sei σ ∈ Sn und τ eine Transposition in Sn. Dann gilt
sign (τ σ) = sign (τ) · sign (σ).
Beweis: Unter Benutzung von Lemma 5.9 erhalten wir
sign (τ σ) =∏
1≤i<j≤n
τ(σ(j))− τ(σ(i))
j − i
=
( ∏1≤i<j≤n
τ(σ(j))− τ(σ(i))
σ(j)− σ(i)
)·( ∏
1≤i<j≤n
σ(j)− σ(i)
j − i
)
=
( ∏1≤i<j≤n
τ(σ(j))− τ(σ(i))
σ(j)− σ(i)
)· sign (σ)
Es genugt zu zeigen, dass
T :=
( ∏1≤i<j≤n
τ(σ(j))− τ(σ(i))
σ(j)− σ(i)
)= sign (τ).
Sei fur 1 ≤ i 6= j ≤ n:
f(i, j) :=τ(σ(j))− τ(σ(i))
σ(j)− σ(i).
Dann gilt offenbar f(i, j) = f(j, i) fur alle 1 ≤ i 6= j ≤ n und somit
T =
∏σ(i)<σ(j)1≤i<j≤n
f(i, j)
· ∏σ(i)>σ(j)1≤i<j≤n
f(j, i)
=
∏σ(i)<σ(j)1≤i<j≤n
f(i, j)
· ∏σ(j)>σ(i)1≤j<i≤n
f(i, j)
=
∏1≤σ(i)<σ(j)≤n
f(i, j) = sign (τ).
2
Satz 5.14. Sei σ ∈ Sn und σ = τ1 ... τk, wobei τ1,...,τk Transpositionensind. Dann gilt sign (σ) = (−1)k.
115

Beweis: Der Satz folgt unmittelbar aus Lemma 5.13 und Bemerkung 5.12.2
Korollar 5.15. Seien σ1, σ2 ∈ Sn. Dann gilt sign (σ1σ2) = sign (σ1)sign (σ2).
Beweis: Sei σ1 = τ1 τ2 ... τk und σ2 = τ1 τ2 ... τ`. Dann gilt wegenSatz 5.14, dass
sign (σ1 σ2) = (−1)k+` = (−1)k(−1)` = sign (σ1)sign (σ2).
2
Korollar 5.16. Sei σ ∈ Sn. Dann gilt sign (σ−1) = sign (σ).
Beweis: Sei σ = τ1 τ2 ... τk. Dann gilt
σ−1 = τk τk−1 ... τ1.
Aus Satz 5.14 folgt
sign (σ) = (−1)k = sign (σ−1).
2
Lemma 5.17. Seien V und W Vektorraume uber einem Korper K. Einen-lineare Abbildung f ∈ Ln(V,W ) ist genau dann schiefsymmetrisch, wennfur jede Permutation σ ∈ Sn gilt:
f(vσ(1), ..., vσ(n)) = sign (σ) · f(v1, ..., vn).
Beweis:
(←) Es gelte fur jedes σ ∈ Sn, dass
f(vσ(1), ..., vσ(n)) = sign (σ)f(v1, ..., vn).
Sei 1 ≤ i < j ≤ n. Dann gilt fur die Transposition τ , die i mit jvertauscht, dass
f(vτ(1), ..., vτ(n)) = −f(v1, ..., vn),
d.h.f(v1, ...vj, ..., vi, ..., vn) = −f(v1, ..., vi, ..., vj, ..., vn).
(→) Sei f schiefsymmetrisch und σ ∈ Sn. Nach Lemma 5.11 existierenTranspositionen τ1,...,τk, so dass
σ = τ1 ... τk.Mit Satz 5.14 gilt
f(vσ(1), ..., vσ(n)) = (−1)kf(v1, ..., vn) = sign (σ)f(v1, ..., vn).
2
116

5.3 Die Determinantenform
Definition 5.18. Sei V ein K-Vektorraum und U = u1, ..., un eine Basisvon V . Dann definieren wir
∆U(v1, ..., vn) =∑σ∈Sn
sign (σ) · c1σ(1) · c2σ(2) · ... · cnσ(n)
fur
vi =n∑j=1
cijuj ∈ V, cij ∈ K, i ∈ 1, ..., n.
Wir bezeichnen ∆U als Determinantenform von V bezuglich der Basis U .
Lemma 5.19. Sei V ein K-Vektorraum und U eine Basis von V . Dann ist∆U ∈ Ln(V,K) alternierend.
Beweis:
1. ∆U ist n-linear: Sei 1 ≤ i ≤ n und
vi =n∑j=1
cijuj, wi =n∑j=1
bijuj.
Dann gilt
vi + wi =n∑j=1
(αij + βij)uj
und somit
∆U(v1, ..., vi + wi, ..., vn)
=∑σ∈Sn
sign (σ) · α1σ(1) · ... · (αiσ(i) + βiσ(i)) · ... · αnσ(n)
=∑σ∈Sn
sign (σ) · α1σ(1) · ... · αiσ(i) · ... · αnσ(n)
+∑σ∈Sn
sign (σ) · α1σ(1) · ... · βiσ(i) · ... · αnσ(n)
= ∆U(v1, ..., vi, ..., vn) + ∆U(v1, ..., wi, ..., vn).
Weiter gilt fur λ ∈ K, dass
λvi =n∑j=1
(λαij)uj
117

und somit
∆U(v1, ..., λvi, ..., vn) =∑σ∈Sn
sign (σ) · α1σ(1) · ... · (λαiσ(i)) · ... · αnσ(n)
= λ∑σ∈Sn
sign (σ) · α1σ(1) · ... · αiσ(i) · ... · αnσ(n)
= λ∆U(v1, ..., vi, ..., vn).
2. ∆U ist alternierend: Sei 1 ≤ i < j ≤ n und τ die Transposition, die imit j vertauscht. Dann gilt
∆U(v1, ..., vj, ..., vi, ..., vn)
=∑σ∈Sn
sign (σ) · α1σ(1)...αjσ(i)...αiσ(j)...αnσ(n)
=∑σ∈Sn
sign (σ) · α1σ(1)...αiσ(j)...αjσ(i)...αnσ(n)
=∑σ∈Sn
sign (σ) · α1τ(σ(1))...αiτ(σ(i))...αjτ(σ(j))...αnτ(σ(n))
=∑σ∈Sn
sign (τ σ) · α1σ(1) · ... · αiσ(i) · ... · αnσ(n)
=∑σ∈Sn
sign (τ)sign (σ) · α1σ(1) · ... · αiσ(i) · ... · αnσ(n)
= −∑σ∈Sn
sign (σ) · α1σ(1) · ... · αiσ(i) · ... · αnσ(n)
= −∆U(v1, ..., vi, ..., vj, ..., vn).
2
Satz 5.20. Sei V ein K-Vektorraum und U = u1, ..., un eine Basis von V .Dann gehort jedes alternierende f ∈ Ln(V,K) zu span ∆U. Es gilt
f(v1, ..., vn) = f(u1, ..., un)∆U(v1, ..., vn) ∀ v1, ..., vn ∈ V.
Beweis: Sei f ∈ Ln(V,K) alternierend. Dann gilt fur
vi =n∑j=1
cijuj ∈ V, cij ∈ K, i ∈ 1, ..., n,
118

dass
f(v1, ..., vn) = f(n∑
j1=1
c1j1uj1 , ...,
n∑jn=1
cnjnujn)
=n∑
j1=1
...
n∑jn=1
c1j1 ...cnjnf(uj1 , ..., ujn)
f alternierend=
∑1≤j1,j2,...,jn≤n
je paarweise verschieden
c1j1 ...cnjnf(uj1 , ..., ujn)
=∑σ∈Sn
c1σ(1)...cnσ(n)f(uσ(1), ..., uσ(n))
Lemma 5.17=
∑σ∈Sn
c1σ(1)...cnσ(n)sign (σ)f(u1, ..., un)
= f(u1, ..., un)∑σ∈Sn
sign (σ)c1σ(1)...cnσ(n)
= f(u1, ..., un)∆U(v1, ..., vn),
d.h. f = λ∆U fur λ := f(u1, ..., un) ∈ K. 2
Lemma 5.21. (Eigenschaften von ∆U) Sei V ein K-Vektorraum und U =u1, ..., un eine Basis von V . Dann gilt fur alle v1, ..., vn ∈ V :
(i) ∆U(u1, ..., un) = 1,
(ii) ∆U(v1, ..., vi+n∑j=1j 6=i
λjvj, ..., vn) = ∆U(v1, ..., vi, ..., vn) mit λ1, ..., λn ∈ K.
(iii) ∆U(vσ(1), ..., vσ(n)) = sign (σ) ·∆U(v1, ..., vn) fur σ ∈ Sn.
Beweis:
(i) ∆U(u1, ..., un) =∑σ∈Sn
sign (σ)c1σ(1)...cnσ(n), wobei
cij = δij =
1 falls i = j
0 sonst.
Also gilt∆U(u1, ..., un) = sign (id)c11c22...cnn = 1.
(ii) folgt, da ∆U eine alternierende n-Linearform ist.
119

(iii) folgt aus Lemma 5.17 mit f := ∆U .
2
Satz 5.22. Sei V ein n-dimensionaler K-Vektorraum und f ∈ Ln(V,K) mitf 6= 0. Dann ist f genau dann alternierend, wenn folgendes gilt:
∀v1, ..., vn ∈ V : f(v1, ..., vn) 6= 0 ⇔ v1, ..., vn ist eine Basis von V.(4.9)
Beweis:
1. Sei f alternierend. Wir zeigen die Aquivalenz (4.9). Sei f(v1, ..., vn) 6= 0.Angenommen v1, ..., vn ist keine Basis von V . Dann ist v1, ..., vnlinear abhangig. Also existiert ein 1 ≤ i ≤ n, so dass
vi =n∑j=1j 6=i
λjvj.
Somit erhalten wir
f(v1, ..., vn) = f(v1, ...,n∑j=1j 6=i
λjvj
︸ ︷︷ ︸i−te Stelle
, ..., vn)
=n∑j=1j 6=i
λjf(v1, ..., vj︸︷︷︸i−te Stelle
, ..., vn) = 0,
da f alternierend ist. Dies ist ein Widerspruch zur Voraussetzung. Alsoist v1, ..., vn eine Basis.Sei jetzt umgekehrt V:=v1, ..., vn eine Basis. Wir zeigen, dass dannf(v1, ..., vn) 6= 0. Da f 6= 0, so existieren w1, ..., wn ∈ V , so dassf(w1, ..., wn) 6= 0. Nach Satz 5.20 gilt
f(v1, ..., vn)∆V (w1, ..., wn) = f(w1, ..., wn) 6= 0.
Also ist auch f(v1, ..., vn) 6= 0.
2. Es gelte nun (4.9). Wir zeigen, dass f alternierend ist. Seien v1, ..., vn ∈V mit vi = vj fur fixierte i 6= j. Dann ist v1, ..., vn linear abhangig.Aufgrund von (4.9) gilt nun f(v1, ..., vn) = 0, d.h. f ist alternierend.
2
120

5.4 Die Determinante fur Endomorphismen
Definition 5.23. Sei V ein K-Vektorraum und ϕ : V → V ein Endomor-phismus. Dann definieren wir die Determinante von ϕ als
det(ϕ) = ∆U(ϕ(u1), ..., ϕ(un))
wobei U = u1, ..., un eine Basis von V ist.
Bemerkung 5.24. Die Definition von det(ϕ) ist unabhangig von der Wahlder Basis U .
Beweis: Ubungsaufgabe. Hinweis: Man benutze UA 2 des 5. Ubungsblattes.2
Lemma 5.25. Sei V ein K-Vektorraum, U eine Basis von V und ϕ : V → Vein Endomorphismus.
(i) Dann ist die Abbildung g : V n → K mit
g(v1, ..., vn) = ∆U(ϕ(v1), ..., ϕ(vn))
eine alternierende n-Linearform.
(ii) Fur alle v1, ..., vn ∈ V gilt
∆U(ϕ(v1), ..., ϕ(vn)) = ∆U(ϕ(u1), ..., ϕ(un))∆U(v1, ..., vn).
Beweis:
(i) Da ϕ linear und ∆U n-linear ist, so ist g auch linear in jedem Argument,d.h. n-linear. Seien v1,...,vn ∈ V beliebig mit vi = vj fur fixierte i 6= j.Dann gilt auch ϕ(vi) = ϕ(vj). Da ∆U alternierend ist, so haben wir
∆U(ϕ(v1), ..., ϕ(vn)) = 0,
d.h. g ist alternierend.
(ii) Nach Satz 5.20 gilt
g(v1, ..., vn) = g(u1, ..., un)∆U(v1, ..., vn) ∀ v1, ..., vn ∈ V,
d.h.
∆U(ϕ(v1), ..., ϕ(vn)) = ∆U(ϕ(u1), ..., ϕ(un))∆U(v1, ..., vn).
121

2
Satz 5.26. Sei V ein n-dimensionaler K-Vektorraum und ϕ, ψ : V → VEndomorphismen. Dann gilt:
(i) det(ϕ ψ) = det(ϕ) · det(ψ).
(ii) det(id) = 1.
(iii) det(λϕ) = λn det(ϕ) fur λ ∈ K.
(iv) ϕ ist ein Automorphismus genau dann, wenn det(ϕ) 6= 0.
(v) Falls det(ϕ) 6= 0, so ist det(ϕ−1) = (det(ϕ))−1.
Beweis: Sei U eine Basis von V .
(i) Mit Lemma 5.25 (ii) und v1 := ψ(u1), ..., vn := ψ(un) gilt, dass
∆U(ϕ(ψ(u1)), ..., ϕ(ψ(un))) = ∆U(ϕ(u1), ..., ϕ(un))·∆U(ψ(u1), ..., ψ(un)).
Dies bedeutet aufgrund der Definition der Determinante aber gerade,dass
det(ϕ ψ) = det(ϕ) · det(ψ).
(ii) Mit Lemma 5.21 haben wir, dass det(id) = ∆U(u1, ..., un) = 1.
(iii) Da ∆U n-linear ist, so gilt
det(λϕ) = ∆U(λϕ(u1), ..., λϕ(un)) = λn∆U(ϕ(u1), ..., ϕ(un)) = λn det(ϕ).
(iv) Da ∆U alternierend ist, so gilt nach Satz 5.22, dass
∀v1, ..., vn ∈ V : ∆U(v1, ..., vn) 6= 0 ⇔ v1, ..., vn ist eine Basis von V.
Fur v1 := ϕ(u1), ..., vn := ϕ(un) ergibt sich
∆U(ϕ(u1), ..., ϕ(un)) 6= 0 ⇔ ϕ(u1), ..., ϕ(un) ist eine Basis von V,
d.h.det(ϕ) 6= 0 ⇔ ϕ ist ein Automorphismus.
(v) Sei ϕ ein Automorphismus. Dann gilt wegen (i) und (ii), dass
1 = det(id) = det(ϕ ϕ−1) = det(ϕ) · det(ϕ−1).
2
122

5.5 Die Determinante fur Matrizen
Definition 5.27. Sei A ∈M(n×n,K). Dann definieren wir die Determi-nante von A als
det(A) = det(α)
mit dem Endomorphismus α : Kn → Kn, fur den α(ei) = ai die Spalten vonA sind, wobei U := e1, ..., en die Standardbasis in Kn ist.
Bemerkung: Man schreibt anstelle von det(A) auch |A|.
Satz 5.28. Seien A,B ∈M(n× n,K). Dann gilt:
(i) det(A ·B) = det(A) · det(B) = det(B · A)
(ii) det(In) = 1
(iii) det(λA) = λn det(A) fur λ ∈ K.
(iv) A ist genau dann invertierbar, wenn det(A) 6= 0.
(v) Falls A invertierbar ist, so gilt det(A−1) = (det(A))−1.
(vi) Die spezielle lineare Gruppe
SL(n,K) = A ∈ GL(n,K) | det(A) = 1
ist eine Untergruppe der allgemeinen linearen Gruppe
GL(n,K) = A ∈M(n× n,K) | det(A) 6= 0.
(vii) det(AT) = det(A)
(viii) det(A) =∑
σ∈Snsign (σ)a1σ(1)a2σ(2)...anσ(n) (Leibnizformel)
Beweis:
(i) Seien α, β : Kn → Kn Endomorphismen, fur die α(ei) = ai und β(ei) =bi die Spalten von A bzw. B sind. Dann gilt wegen Satz 5.26(i), dass
det(A ·B) = det(α β) = det(α) · det(β) = det(A) · det(B).
Die zweite Gleichung folgt durch Vertauschung von A und B.
(ii) Wegen id(x) = x = Inx, so gilt nach Satz 5.26(ii), dass
det(In) = det(id) = 1.
123

(iii) Sei α : Kn → Kn ein Endomorphismus, fur den α(ei) = ai die Spaltenvon A sind. Dann sind fur λ ∈ K die Spalten von λA gleich λai = λα(ei)und mit Satz 5.26(iv) erhalten wir, dass
det(λA) = det(λα) = λn det(α) = λn det(A).
(iv) Wegen (i) und (ii) gilt, dass
det(A) · det(A−1) = det(A · A−1) = det(In) = 1.
(v) Sei α : Kn → Kn ein Endomorphismus, fur den α(ei) = ai die Spaltenvon A sind. Mit Satz 5.26(v) erhalten wir, dass
det(A) 6= 0 ⇔ det(α) 6= 0⇔ α ist ein Automorphismus
⇔ A ist invertierbar.
(vi) Da die Assoziativitat der Matrizenmultiplikation gegeben ist, so mussenwir nur zeigen, dass A · B ∈ SL(n,K), In ∈ SL(n,K) und A−1 ∈SL(n,K), falls A ∈ SL(n,K) und B ∈ SL(n,K). Wegen (iii) und (v)gilt
det(A ·B) = det(A) det(B) = 1
sowiedet(A−1) = (det(A))−1 = 1.
(viii) Nach Definition gilt
det(A) = det(α) = ∆U(a1, ..., an) =∑σ∈Sn
sign (σ)a1σ(1)a2σ(2)...anσ(n).
wobei U := e1, ..., en die Standardbasis in Kn ist.
(vii) Es gilt:
det(AT) =∑σ∈Sn
sign (σ)aσ(1)1aσ(2)2...aσ(n)n
=∑σ∈Sn
sign (σ−1)a1σ−1(1)a2σ−1(2)...anσ−1(n)
=∑σ∈Sn
sign (σ)a1σ(1)a2σ(2)...anσ(n) = det(A).
124

2
Spezialfalle n=2,3,4:
det
(a11 a12
a21 a22
)= a11a22 − a12a21
det
a11 a12 a13
a21 a22 a23
a31 a32 a33
= a11a22a33 + a12a23a31 + a13a21a32
− a13a22a31 − a11a23a32 − a12a21a33
det
a11 a12 a13 a14
a21 a22 a23 a24
a31 a32 a33 a34
a41 a42 a43 a44
= a11a22a33a44 − a11a22a34a43 + a11a23a34a42 − a11a23a32a44
+ a11a24a32a43 − a11a24a33a42 + a12a24a33a41 − a12a24a31a43
+ a12a23a31a44 − a12a23a34a41 + a12a24a33a41 − a12a24a31a43
+ a13a24a31a42 − a13a24a32a41 + a13a21a32a44 − a13a21a34a42
+ a13a22a34a41 − a13a22a31a44 + a14a22a31a43 − a14a22a33a41
+ a14a21a33a42 − a14a21a32a43 + a14a23a32a41 − a14a23a31a42
Lemma 5.29. Fur obere und untere Dreiecksmatrizen A gilt
det(A) =n∏j=1
ajj
Beweis: Fur obere Dreiecksmatrizen sieht man es leicht wie folgt:
det(A) =∑σ∈Sn
sign (σ)a1σ(1)...anσ(n).
Sei σ eine beliebige Permutation, die nicht gleich der identischen Permutationist. Dann gibt es mindestens ein i ∈ 1, ..., n mit i > σ(i). Dann gilt aiσ(i) =0. Somit gilt
a1σ(1)...anσ(n) = 0
fur alle Permutationen, die nicht gleich der identischen Permutation sind.Daraus folgt sofort
det(A) = sign (id)a11...ann =n∏j=1
ajj.
125

Analog gilt auch fur untere Dreiecksmatrizen, dass
det(A) =n∏j=1
ajj.
2
Lemma 5.30. Sei A ∈ M(n × n,K). Dann andert sich det(A) durch ele-mentare Zeilentransformationen oder Spaltentransformationen wie folgt:
1. Bei Multiplikation der i-ten Zeile bzw. der i-ten Spalte mit c 6= 0:
det(TE1A) = c · det(A) bzw. det(ATE1) = c · det(A).
2. Bei Addition der i-ten Zeile bzw. der i-ten Spalte zur j-ten Zeile bzw.der j-ten Spalte:
det(TE2A) = det(A) bzw. det(ATE2) = det(A).
3. Bei Addition des c-fachen der i-ten Zeile bzw. der i-ten Spalte zur j-tenZeile bzw. der j-ten Spalte:
det(TE3A) = det(A) bzw. det(ATE3) = det(A).
4. Bei Vertauschung der i-ten Zeile bzw. der i-ten Spalte mit der j-tenZeile bzw. der i-ten Spalte:
det(TE4A) = − det(A) bzw. det(ATE4) = − det(A).
Beweis: Fur Zeilentransformationen gilt:
1. det(TE1A) = det
1 ... 0 ... 0.... . .
......
0 ... c ... 0...
.... . .
...0 ... 0
i... 1
det(A) = c det(A)
2. Spezialfall von 3.
126

3. det(TE3A) = det
1 ... 0 ... 0 ... 0.... . .
......
...0 ... 1 ... 0 ... 0...
.... . .
......
0 ... c ... 1 ... 0...
....... . .
...0 ... 0
i... 0
j... 1
det(A) = det(A)
4. det(TE4A) = det
1 ... 0 ... 0 ... 0.... . .
......
...0 ... 0 ... 1 ... 0...
.... . .
......
0 ... 1 ... 0 ... 0...
....... . .
...0 ... 0
i... 0
j... 1
det(A) = − det(A)
Dabei haben wir benutzt, dass
det(TE4) = sign (τ)a1τ(1)...anτ(n) = (−1) · 1 · ... · 1 = −1,
wobei τ die Permutation ist, die i mit j vertauscht.
Der Beweis fur die Spaltentransformationen ist vollig analog. 2
Bemerkung 5.31. Fur Blockmatrizen gilt:
(i) det
(A 00 I
)= det(A) und det
(I 00 D
)= det(D)
(ii) det
(A B0 D
)= det(A) det(D) = det
(A 0C D
)Beweis:
(i) Wir zeigen die erste Gleichung. Die zweite folgt analog. Mittels elemen-tarer Zeilentransformationen TE3 und TE4 konnen wir A in eine obereDreiecksmatrix A uberfuhren und bekommen
det(A) = det(TA) = det(T ) det(A) = (−1)` det(A),
127

wobei ` die Anzahl der Zeilenvertauschungen ist, die wir vorgenommenhaben, um A zu erhalten. Zudem gilt
det
(A 00 I
)= det
(T 00 I
)det
(A 00 I
)= (−1)` det
(A 00 I
),
Da A eine obere Dreiecksmatrix ist, so gilt
det
(A 00 I
)= det(A)
und somit
det
(A 00 I
)= det(A).
(ii) Wir zeigen den ersten Teil der Gleichung. Der zweite folgt analog. Sei
M :=
(A B0 D
)Falls det(A) = 0, so sind die Spalten von A linear abhangig und damitauch die Spalten von M , die zum linken Block gehoren. Somit gilt auchdet(M) = 0. Falls det(D) = 0, so sind die Zeilen von D linear abhangigund damit auch die Zeilen von M , die zum unteren Block gehoren.Somit gilt auch det(M) = 0. Falls det(A) 6= 0 und det(D) 6= 0, danngilt
det(M) = det
(A 00 I
)det
(I A−1BD−1
0 I
)det
(I 00 D
)= det(A) · 1 · det(D) = det(A) det(D).
2
5.6 Der Entwicklungssatz von Laplace
Satz 5.32. (Entwicklungssatz von Laplace) Sei n ≥ 2 und A ∈M(n×n,K).Dann gilt
(i) fur jedes i ∈ 1, ..., n, dass
det(A) =n∑j=1
(−1)i+jaij det(A′ij) (Entwicklung nach der i-ten Zeile),
128

(ii) fur jedes j ∈ 1, ..., n, dass
det(A) =n∑i=1
(−1)i+jaij det(A′ij) (Entwicklung nach der j-ten Spalte).
Dabei ist A′ij die Matrix, die sich aus der Matrix A nach Streichung der i-tenZeile und der j-ten Spalte ergibt.
Beweis:
(i) Dies folgt aus (ii), wenn wir anstelle von A die Matrix A> betrachten,denn
det(A) = det(A>) =n∑i=1
(−1)i+jaji det((A>)′ij)
=n∑i=1
(−1)i+jaji det((A′ji)>)
=n∑i=1
(−1)i+jaji det(A′ji) =n∑j=1
(−1)j+iaij det(A′ij).
(ii) Sei U := (e1, ..., en) die Standardbasis von Kn. Seien s1,...,sn die Spal-ten von A und j ∈ 1, ..., n fixiert. Da ∆U eine Multilinearform ist, soerhalten wir
det(A) = ∆U(s1, ..., sj, ..., sn) = ∆U(s1, ...,n∑i=1
aijei, ..., sn)
=n∑i=1
aij∆U(s1, ..., eij, ..., sn) =
n∑i=1
aij det(Aij),
wobei
Aij =
a11 ... 0 ... a1n
......
...ai1 ... 1 ... ain...
......
an1 ... 0j... ann
.
Nun schieben wir die i-te Zeile durch (i− 1) Zeilenpermutationen nachoben in die erste Zeile und danach die j-te Spalte durch (j − 1) Spal-
129

tenpermutationen in die erste Spalte. Dann erhalten wir
det(A) =n∑i=1
aij det(Aij) =n∑i=1
aij(−1)i−1(−1)j−1 det
(1 ∗0 A′ij
)=
n∑i=1
aij(−1)i+j det(1) det(A′ij) =n∑i=1
aij(−1)i+j det(A′ij).
2
5.7 Die Cramersche Regel
Satz 5.33. (Cramersche Regel) Sei A ∈ M(n × n,K) regular. Dann kannman die Losung x des linearen Gleichungssystems Ax = b wie folgt darstellen:
xj =det(Aj)
det(A)fur j = 1, ..., n,
wobei Aj die Matrix ist, die man erhalt, wenn man in A die j-te Spalte durchb ersetzt.
Beweis: Da A regular ist, so wissen wir, dass das LGS Ax = b genau eineLosung besitzt. Daher genugt es zu zeigen, dass x mit
xj =det(Aj)
det(A)fur j = 1, ..., n,
eine Losung ist, d.h. fur alle k ∈ 1, ..., n gilt:
n∑j=1
akjdet(Aj)
det(A)= bk. (4.10)
Sei nun k fixiert. Wir entwickeln zunachst mit dem Laplace’schen Entwick-lungssatz die Matrix Aj nach der j-ten Spalte und erhalten, dass
det(Aj) =n∑i=1
bi(−1)i+j det(A′ij). (4.11)
Sei jetzt Aki die Matrix, die aus A hervorgeht, wenn man die i-te Zeile durchdie k-te Zeile von A ersetzt. Dann ergibt der Laplace’sche Entwicklungssatzfur Aki entwickelt nach der i-ten Zeile, dass
n∑j=1
akj(−1)i+j det(A′ij) = det(Aki). (4.12)
130

Fur i 6= k besitzt Aki zwei gleiche Zeilen und damit also linear abhangigeZeilen. Daher ist Aki fur i 6= k nicht invertierbar und damit det(Aki) = 0 furi 6= k. Fur i = k gilt offenbar Aki = A. Mit (4.12) ergibt sich nun, dass
n∑j=1
akj(−1)i+j det(A′ij) =
det(A), falls i = k,
0, falls i 6= k.
Unter Beachtung von (4.11) erhalten wir damit
n∑j=1
akj det(Aj) =n∑j=1
akj
n∑i=1
bi(−1)i+j det(A′ij)
=n∑i=1
bi
n∑j=1
akj(−1)i+j det(A′ij) = bk det(A).
Division durch det(A) ergibt die Behauptung (4.10). 2
Beispiel: Seien
A =
(1 26 9
), b =
(33
).
Dann erhalten wir die Losung x von Ax = b durch:
x1 =
det
(3 23 9
)det
(1 26 9
) =27− 6
9− 12= −7, x2 =
det
(1 36 3
)det
(1 26 9
) =3− 18
9− 12= 5.
Bemerkung: Die Cramersche Regel ist zur Berechnung der Losung x furgroße n extrem aufwandig und damit ungeeignet. Aber es lassen sich mitdieser Darstellung von x verschiedene Eigenschaften leicht nachweisen, z.B.dass die Losung x fur K = R stetig von den Koeffizienten von A und babhangt.Hierbei sei auch erwahnt, dass die Abbildung
det : M(n× n,R)→ RA 7→ det(A)
stetig ist. (UA)Der folgende Satz ist eine hilfreiche Vorbereitung fur den fundamentalenSatz von Cayley-Hamilton, den wir an spaterer Stelle behandeln. Der Satzvon Cayley-Hamilton hat eine essentielle Bedeutung fur
131

Satz 5.34. Sei A = (aij) ∈M(n× n,K). Dann gilt fur adj(A) := (dij) mit
dij = (−1)i+j det(A′ji),
dassadj(A) · A = det(A)I. (4.13)
Beweis: Aufgrund des Entwicklungssatzes von Laplace wissen wir, dass furbeliebige Matrizen gilt:
det(A) =n∑j=1
(−1)i+jaji det(A′ji).
Somit erhalten wir, dass
n∑j=1
dijaji =n∑j=1
(−1)i+jaji det(A′ji) = det(A).
Außerdem sehen wir, dass fur k 6= i gilt:
n∑j=1
dijajk =n∑j=1
(−1)i+jajk det(A′ji) = det(A),
wobei A die Matrix ist, die aus A ensteht, wenn man die k-te Spalte durchdie i-te Spalte ersetzt. Dann stimmen aber die k-te Spalte und die i-te Spalteuberein und somit ist det(A) = 0. Zusammengefasst ergibt sich, dass
adj(A) · A = det(A)I.
2
6 Eigenwerte
Definition 6.1. Sei V ein K-Vektorrraum und ϕ ein Endomorphismus aufV . Dann heißt λ ∈ K ein Eigenwert von ϕ, falls es ein v 6= 0 in V gibt,so dass
ϕ(v) = λv.
Ein solcher Vektor v heißt Eigenvektor zum Eigenwert λ.
Bemerkung: Eigenvektoren haben nach ihrer Definition die Eigenschaft,dass sie unter der Abbildung ϕ ihre Richtung nicht andern.
132

Definition 6.2. Speziell fur Matrizen A ∈M(n× n,K) definiert man, dassλ ∈ K ein Eigenwert von A ist, falls es ein v 6= 0 in Kn gibt, so dass
Av = λv.
Entsprechend heißt auch hier ein solcher Vektor v Eigenvektor zum Eigen-wert λ.
Bemerkung: Eigenvektoren haben damit die Eigenschaft, dass sie bei Mul-tiplikation mit A ihre Richtung bis auf das Vorzeichen nicht andern.
Hinweis: Eine Zahl λ ist per Definition ein Eigenwert einer Matrix A, fallsein Vektor x 6= 0 mit Ax = λx existiert. Dies ist aquivalent dazu, dassker(A−λI) 6= 0. Dies ist wiederum aquivalent dazu, dass det(A−λI) = 0.
Beispiele:
1. Sei
A =
(1 2−1 4
).
Dann ist λ ein Eigenwert von A genau dann, wenn
0 = det(A− λI) = det
(1− λ 2−1 4− λ
)= (1− λ)(4− λ) + 2 = λ2 − 5λ+ 6 = (λ− 2)(λ− 3)
Damit sind λ1 = 2 und λ2 = 3 Eigenwerte von A. Jeder Eigenvektorzum Eigenwert λ1 = 2 gehort zu
ker(A− 3I) = ker
(−1 2−1 2
)= span ( 2
1 ).
Jeder Eigenvektor zum Eigenwert λ2 = 3 gehort zu
ker(A− 2I) = ker
(−2 2−1 1
)= span ( 1
1 ).
2. Sei α ∈ [0, 2π) und
A =
(cos(α) − sin(α)sin(α) cos(α)
).
Die Matrix A bedeutet eine Drehung der Vektoren v im R2 um denWinkel α. Sie besitzt nur Eigenvektoren, wenn α = 0 oder α = π.
133

3. Sei α ∈ [0, 2π) und
A =
(cos(α) sin(α)sin(α) − cos(α)
).
Die Matrix A bedeutet eine Spiegelung der Vektoren v im R2 an derGeraden mit dem Winkel α/2. Sie besitzt die Eigenvektoren
v1 = (cos(α/2), sin(α/2))
zum Eigenwert λ = 1 und
v2 = (cos((α + π)/2), sin((α + π)/2))
zum Eigenwert λ = −1.
4. Bestimmung der Rotationsachse eines Planeten. Wir wahlen 3 PunkteA, B, C auf der Oberflache des Planeten und messen deren Koordina-ten zu einem spateren festen Zeitpunkt. Der Einfachheit halber sei derRadius des Planeten gleich Eins und
A = (1, 0, 0), B = (0, 1, 0), C = (0, 0, 1),
Zum spateren Zeitpunkt erhalten wir
A = (−35, 0, 4
5), B = (4
5, 0, 3
5), C = (0, 1, 0).
Dann ist die Rotationsachse ein Eigenvektor v ∈ R3 der Darstellungs-matrix
A =
−35
45
00 0 145
35
0
zum Eigenwert λ = 1. D.h. Av = v, also (A − I)v = 0. LeichtesNachrechnen zeigt
ker(A− I) = ker
−85
45
00 −1 145
35−1
= span (
122
).
Somit zeigt die Rotationsachse in Richtung v =(
122
).
5. Sei V = C∞(I,R), wobei I ein Intervall in R ist. Dann ist die Abbildung
ϕ : V → V mit ϕ(f) = f ′
ein Endomorphismus und jedes λ ∈ R ist Eigenwert von ϕ zum Eigen-vektor f ∈ V mit
f(x) = eλx.
134

Definition 6.3. Sei ϕ ∈ EndK(V ). Dann nennt man die Menge
Eig(ϕ, λ) := v ∈ V : ϕ(v) = λv
den Eigenraum von ϕ zum Eigenwert λ. Analog heißt fur Matrizen A ∈M(n× n,K) die Menge
Eig(A, λ) := v ∈ Kn : Av = λv
Eigenraum von A zum Eigenwert λ.
Lemma 6.4. Fur Endomorphismen ϕ : V → V und Matrizen A ∈ M(n ×n,K) sind die Eigenraume Eig(ϕ, λ) und Eig(A, λ) Unterraume von V bzw.Kn.
Beweis: Wir zeigen dies fur Endomorphismen. Fur Matrizen geht es analog.Sei ϕ ein Endomorphismus und λ ein Eigenwert von ϕ. Seien v1 und v2
Elemente von Eig(ϕ, λ). Dann gilt
ϕ(v1) = λv1 ∧ ϕ(v2) = λv2.
Somit gilt auch
ϕ(v1 + v2) = ϕ(v1) + ϕ(v2) = λv1 + λv2 = λ(v1 + v2).
Sei c ∈ K und v ∈ Eig(ϕ, λ). Dann gilt
ϕ(cv) = cϕ(v) = cλv = λ(cv).
2
Definition 6.5. Die Menge der Eigenwerte
σ(ϕ) := λ ∈ K | ∃v ∈ V : v 6= 0 ∧ ϕ(v) = λv
fur Endomorphismen ϕ bzw. die Menge der Eigenwerte
σ(A) := λ ∈ K | ∃v ∈ Kn : v 6= 0 ∧ Av = λv
fur Matrizen A wird das Spektrum von ϕ bzw. A genannt. Als Spektral-radius bezeichnet man den Betrag des betragsmaßig großten Eigenwerts.
Im nachsten Abschnitt lernen wir Methoden kennen, wie man Eigenwerteund Eigenvektoren bestimmen kann und somit auch das Spektrum und dieEigenraume erhalt.
135

6.1 Das charakteristische Polynom
Sei V in diesem Abschnitt ein endlich dimensionaler K-Vektorraum.
Lemma 6.6. Sei ϕ ∈ EndK(V ). Dann ist λ genau dann ein Eigenwert vonϕ, wenn det(ϕ− λidV ) = 0.
Beweis: Es gelten mit Satz 5.26 folgende Aquivalenzen:
λ ist ein EW von ϕ⇔ ∃ v ∈ V : ϕ(v) = λv ∧ v 6= 0
⇔ ∃ v ∈ V : ϕ(v)− λv = 0 ∧ v 6= 0
⇔ ∃ v ∈ V : (ϕ− λidV )(v) = 0 ∧ v 6= 0
⇔ ϕ− λidV ist kein Automorphismus.
⇔ det(ϕ− λidV ) = 0.
2
Man sieht nun auch sofort folgendes Lemma.
Lemma 6.7. Fur ϕ ∈ EndK(V ) ist Eig(ϕ, λ) = ker(ϕ − λidV ) und furA ∈M(n× n,K) ist Eig(A, λ) = ker(A− λI).
Definition 6.8. Sei ϕ ∈ EndK(V ) und p : K → K eine Abbildung mit
pϕ(λ) = det(ϕ− λidV ).
Dann nennt man die Abbildung pϕ das charakteristische Polynom vonϕ.
Fur Matrizen A ∈ M(n × n,K) kann man sich leicht mit Hilfe der Leibniz-formel uberlegen, dass pA(λ) = det(A − λI) ein Polynom n-ten Grades ist(UA).
Im Falle von Endomorphismen ϕ sieht man dann auch, dass pϕ(λ) ein Poly-nom ist, da
pϕ(λ) = det(ϕ− λidV ) = det(A− λI) = pA(λ),
wobei U eine beliebige Basis von V und A = MUU (ϕ) die Darstellungsmatrix
von ϕ ist. Hierbei haben wir ausgenutzt, dass fur beliebige Endomorphismenψ gilt, dass
det(ψ) = ∆U(ψ(u1), ..., ψ(un)) = det(MUU (ψ))
mit U = u1, ..., un und
MUU (ϕ− λidV ) = MU
U (ϕ)− λMUU (idV ) = MU
U (ϕ)− λI.
136

Bemerkung 6.9. Nach Lemma 6.6 sind die Eigenwerte eines Endomorhis-mus’ ϕ gerade die Nullstellen von pϕ = det(ϕ−λidV ). Entsprechend sind dieEigenwerte einer Matrix A gerade die Nullstellen von pA = det(A− λI).
Lemma 6.10. Seien λ1 und λ2 zwei verschiedene Eigenwerte eines Endo-morhismus’ ϕ. Dann gilt
Eig(ϕ, λ1) ∩ Eig(ϕ, λ2) = 0.
Beweis: Sei v ∈ Eig(ϕ, λ1) ∩ Eig(ϕ, λ2). Da λ1 und λ2 Eigenwerte von ϕsind, so gilt
λ1v = ϕ(v) = λ2v
und somit (λ1 − λ2)v = 0. Da λ1 6= λ2, so ist v = 0. 2
6.2 Satz von Cayley-Hamilton
Satz 6.11. (Satz von Cayley-Hamilton) Sei A ∈ M(n × n,K). Fur dascharakteristische Polynom pA(λ) = a0 + a1λ+ ...+ anλ
n gilt:
a0 + a1A+ ...+ anAn = 0.
Sei V ein endlich-dimensionaler K-Vektorraum und ϕ : V → V ein Endo-morphismus. Dann gilt fur das charakteristische Polynom pϕ(λ) = a0 +a1λ+...+ amλ
m, dass fur alle v ∈ V :
a0 + a1ϕ(v) + ...+ anϕn(v) = O.
Beweis: Wir beweisen den Satz zunachst fur Matrizen. Mit Lemma 5.34wissen wir, dass
adj(A− λI) · (A− λI) = det(A− λI)I = pA(λ)I.
Aufgrund der Definition von adj(A−λI) erhalten wir, dass in jedem Elementvon adj(A−λI) das λ maximal in der Potenz n− 1 vorkommt. Somit findenwir B0, B1, ..., Bn−1, so dass
adj(A− λI) =n−1∑i=0
Biλi.
Daraus ergibt sich, dass
n−1∑i=0
BiAλi −
n−1∑i=0
Biλi+1 = (anλ
n + ...+ a1λ+ a0)I,
137

wobei a0, ..., an die Koeffizienten des charakteristischen Polynoms sind. DurchKoeffizientenvergleich sehen wir, dass
B0A = a0I
B1A−B0 = a1I
B2A−B1 = a2I
...
Bn−1A−Bn−2 = an−1I
−Bn−1 = anI.
Multiplizieren wir fur alle i = 1, ..., n die (i+ 1)-te Gleichung dieses Systemsmit Ai, so erhalten wir
B0A = a0I
B1A2 −B0A = a1A
B2A3 −B1A
2 = a2A2
...
Bn−1An −Bn−2A
n−1 = an−1An−1
−Bn−1An = anA
n.
Die Summe aller Gleichungen bedeutet
0 = a0I + a1A+ a2A2 + ...+ an−1A
n−1 + anAn = pA(A).
Nun beweisen wir den Satz fur Endomorphismen. Sei U = u1, ..., un eineBasis von V und v =
∑ni=1 ciui ∈ V beliebig. Wir betrachten nun M :=
MUU (ϕ). Dann gilt fur alle k = 1, ...,m: Mk = MU
U (ϕk) (UA). Der Satz vonCayley-Hamilton fur Matrizen liefert uns
a0 + a1M + ...+ amMm = 0,
wobei a0 + a1λ + ... + anλn = det(M − λI) = det(ϕ − λidV ). Seien m
[k]ij die
Matrixeintrage von Mk. Dann erhalten wir fur alle i, j ∈ 1, ..., n, dass
m∑k=0
akm[k]ij = 0
und somitn∑i=1
ci
m∑k=0
ak
n∑j=1
m[k]ij uj =
n∑i=1
ci
n∑j=1
m∑k=0
akm[k]ij uj = O,
138

P
Q=P+v
v =−−→PQ
Abbildung 4.1: Anheften des Vektors v ∈ V an einen Punkt P ∈ A in einemaffinen Raum (A, V ,+).
d.h.
n∑i=1
ci
m∑k=0
akϕk(ui) = O.
Da ϕ linear ist, so erhalten wir
m∑k=0
akϕk(v) =
m∑k=0
ak
n∑i=1
ciϕk(ui) = O.
2
7 Affine Geometrie
7.1 Affine Raume
Definition 7.1. Sei A eine Menge von Punkten und V ein K-Vektrorraum.Dann heißt (A, V,+) ein affiner Raum, falls
(i) ∀P ∈ A ∀v ∈ V : P + v ∈ A
(ii) ∀P ∈ A ∀v, w ∈ V : P + (v +V w) = (P + v) + w
(iii) ∀P ∈ A : P + O = P , wobei O der Nullvektor von V ist
(iv) ∀P,Q ∈ A ∃!v ∈ V : Q = P + v (einfache Transitivitat)
Geometrisch lasst sich die Verknupfung P+v als Anheften eines Vektors v anden Punkt P interpretieren, siehe Abb. 4.1. Fur gegebene Punkte P,Q ∈ Anennt man den eindeutigen Vektor v ∈ V mit Q = P + v den Verbindungs-
vektor−→PQ von P nach Q.
Bemerkung 7.2. Falls klar ist, welcher Vektorraum gemeint ist, sprichtman kurz auch einfach nur von einem affinen Raum A.
139

Lemma 7.3. Sei (A, V,+) ein affiner Raum. Dann existiert eine bijektiveAbbildung zwischen V und A.
Beweis: Sei P∗ ∈ A ein beliebiger Punkt. Dann ist die Abbildung
ϕ : V → A
v 7→ P∗ + v
eine bijektive Abbildung, da es wegen der einfachen Transitivitat fur jedesQ ∈ A genau ein v ∈ V gibt, so dass
f(v) = P∗ + v = Q.
2
Definition 7.4. Die Dimension eines affines Raumes (A, V,+) ist definiertals
dimK(A) := dimK(V ).
Lemma 7.5. Seien (A1, V,+) und (A2, V,+) zwei affine Raume mit demgleichen Vektorraum V . Dann gibt es eine bijektive Abbildung zwischen A1
und A2.
Beweis: Nach Lemma 7.3 existieren zwei Bijektionen ϕ1 : V → A1 undϕ2 : V → A2. Dann ist ϕ : A1 → A2 mit ϕ := ϕ2 ϕ−1
1 bijektiv. 2
Lemma 7.6. Sei (A, V,+) ein affiner Raum und P,Q,R ∈ A. Dann gilt dieDreiecksregel −→
PR =−→PQ+V
−→QR.
Beweis: Seien u :=−→PQ, v :=
−→QR und w :=
−→PR. Dann gilt nach Definition,
dass
P + w = R = Q+ v = (P + u) + v = P + (u+V v).
Aus der einfachen Transitivitat folgt nun, dass w = u+V v, d.h.
−→PR =
−→PQ+V
−→QR.
2
Definition 7.7. Sei (A, V,+) ein affiner Raum. Dann heißt N ein affinerUnterraum, falls es einen Unterraum U von V gibt und ein P0 ∈ A existiert,so dass
N = Q ∈ A |Q = P0 + u, u ∈ U.Man schreibt dafur auch kurz N = P0 + U .
140

P
Q
Ru
v
w = u+ v
Abbildung 4.2: Dreiecksregel in affinen Raumen.
Lemma 7.8. Sei N = P0+U ein affiner Unterraum von (A, V,+) mit P0 ∈ Aund U ⊆ V . Dann ist (N,U,+) ein affiner Raum.
Beweis: Da N ⊆ A und U ⊆ V , so genugt es, die Eigenschaften (i) und (iv)eines affinen Unterraums nachzuweisen.
(i) Sei Q ∈ N und v ∈ U . Dann existieren ein P0 ∈ N und ein u ∈ U , sodass
Q+ v = (P0 + u) + v = P0 + (u+V v) ∈ N.
(iv) Seien P,Q ∈ N . Dann existieren P0 ∈ A und u, v ∈ U , so dass
P = P0 + u, Q = P0 + v.
Damit erhalten wir
Q = P0 + v = P0 + (u− u) + v = (P0 + u) + (−u+ v)
= P + w mit w := v − u ∈ U.
Wir nehmen nun an, dass es zwei Vektoren w, z ∈ U mit Q = P+w undQ = P + z gibt. Dann gilt w = z aufgrund der einfachen Transitivitatvon (A, V,+).
2
Bemerkung 7.9. Sei (A, V,+) ein affiner Raum und P0 ∈ A. Fur zweiUnterraume U1 und U2 von V mit P0 + U1 = P0 + U2 gilt: U1 = U2, d.h. derzu einem affinen Unterraum N gehorige Unterraum U ist eindeutig.
Beweis: Seien U1 und U2 Unterraume von V mit P0 + U1 = P0 + U2. Wirzeigen, dass U1 ⊆ U2. Sei u1 ∈ U1. Dann gilt
P0 + u1 ∈ P0 + U1 = P0 + U2,
141

d.h. ∃u2 ∈ U2, so dass P0 + u1 = P0 + u2. Aufgrund der Transitivitat folgtu1 = u2, d.h. u1 ∈ U2, also U1 ⊆ U2. Durch Vertauschung von U1 und U2
erhalt man auch die umgekehrte Richtung U2 ⊆ U1. 2
Bemerkung 7.10. Ein affiner Unterraum N ist unabhangig von der Wahldes Punktes P0 ∈ N .
Beweis: Seien P0, Q0 ∈ N und N = P0 + U mit U ⊆ V . Dann ist
Q0 + U ⊆ P0 + U,
denn mit w :=−−−→P0Q0 ∈ U gilt fur beliebige u ∈ U , dass
Q0 + u = (P0 + w) + u = P0 + (w +V u) ∈ P0 + U.
Durch Vertauschung von P0 und Q0 erhalten wir die umgekehrte Richtungund damit
Q0 + U = P0 + U,
2
Bemerkung 7.11. Fur einen affinen Unterraum N = P0 + U nennt manP0 ∈ A einen Aufpunkt von N und U ⊆ V die Richtung von N .
Definition 7.12. (Spezielle affine Unterraume). Sei N ein affiner Unter-raum von (A, V,+).
(i) Falls dimK(N) = 0, so nennt man N einen (affinen) Punkt.
(ii) Falls dimK(N) = 1, so nennt man N eine (affine) Gerade.
(iii) Falls dimK(N) = 2, so nennt man N eine (affine) Ebene.
(iv) Falls dimK(N) = dimK(A)− 1, so nennt man N eine Hyperebene vonA.
Beispiele:
1. Seien P,Q zwei verschiedene Punkte im R2. Dann bildet
P + span v = P + cv | c ∈ R
fur v :=−→PQ die Gerade im R2, die durch die Punkte P und Q geht.
142

2. Seien P,Q,R drei verschiedene Punkte im R3. Dann bildet
N := P + span v, w = P + av + bw | a, b ∈ R
fur v :=−→PQ und w :=
−→PR einen affinen Unterraum im R3. Falls
dimR(N) = 1, dann liegen P , Q und R auf einer Geraden, namlichder Geraden N . Falls dimR(N) = 2, dann ist N die Ebene im R3, diedurch die Punkte P , Q und R aufgespannt wird.
Definition 7.13. Seien N1 und N2 zwei affine Unterraume eines affinenRaumes (A, V,+). Dann heißen N1 und N2 parallel bzw. schwach parallel,wenn fur die zugehorigen Unterraume U1 und U2 gilt: U1 = U2 bzw. U1 ( U2.
Lemma 7.14. Seien N1 und N2 zwei parallele affine Unterraume eines af-finen Raumes (A, V,+). Dann gilt entweder N1 = N2 oder N1 ∩N2 = ∅.Beweis: Nach Voraussetzung existieren ein Unterraum U von V und zweiPunkte P1 ∈ N1, P2 ∈ N2, so dass
N1 = P1 + U und N2 = P2 + U.
Sei v :=−−→P1P2.
Falls v ∈ U , dann gilt fur alle u ∈ U , dass
P2 + u = (P1 + v) + u = P1 + (v + u) ∈ N1,
d.h. N2 ⊆ N1 sowie
P1 + u = (P2 + (−v)) + u = P1 + (−v + u) ∈ N2,
d.h. N1 ⊆ N2 und somit N1 = N2.Sei nun v /∈ U . Angenommen, es existiert ein P ∈ N1 ∩N2. Dann existierenu1 ∈ U und u2 ∈ U mit
P1 + u1 = P = P2 + u2 = P1 + (v + u2).
Aufgrund der Transitivitat gilt u1 = v + u2, d.h. v = u1 − u2 ∈ U imWiderspruch zur Annahme. Also ist N1 ∩N2 = ∅. 2
Bemerkung: Seien N1 und N2 zwei schwach parallele affine Unterraumeeines affinen Raumes (A, V,+). Dann gilt entweder N1 ( N2 oder N1∩N2 =∅. (UA)
Definition 7.15. Seien N1 und N2 zwei affine Unterraume eines affinenRaumes (A, V,+). Dann heißt N1∨N2 die affine Hulle von N1 und N2, wennN1∨N2 der kleinste affine Unterraum von (A, V,+) mit N1 ⊆ (N1∨N2) undN2 ⊆ (N1 ∨N2) ist.
143

Lemma 7.16. Seien N1 und N2 zwei affine Unterraume eines affinen Raum-es (A, V,+). Dann lasst sich N1 ∨N2 einfach wie folgt darstellen. Fur N1 =P1 + U1 und N2 = P2 + U2 gilt:
N1 ∨N2 = P1 + U mit U = span −−→P1P2+ U1 + U2.
Beweis: Sei N := N1 ∨N2. Da P1 ∈ N1 ⊆ N , so existiert ein Unterraum Uvon V , so dass N = P1 + U . Wir zeigen, dass
span −−→P1P2+ U1 + U2 ⊆ U.
Dann folgt die Behauptung daraus, dassN1∨N2 der kleinste affine Unterraumvon (A, V,+) ist. Da
span −−→P1P2+ U1 + U2 = span −−→P1P2 ∪ U1 ∪ U2,
so brauchen wir nur zu zeigen, dass−−→P1P2 ∈ U , U1 ⊆ U und U2 ⊆ U .
1. Fur v :=−−→P1P2 gilt P1 + v = P2 ∈ N2 ⊆ N und somit v ∈ U .
2. Fur alle u1 ∈ U1 gilt P1 + u1 ∈ N1 ⊆ N und somit u1 ∈ U .
3. Fur alle u2 ∈ U2 gilt P1 + (v + u2) = P2 + u2 ∈ N2 ⊆ N und somitv + u2 ∈ U . Da auch v ∈ U , so folgt u2 = (v + u2)− v ∈ U .
2
Beispiel: Seien N1 und N2 zwei Geraden im R3.
1. Falls N1 und N2 genau einen Schnittpunkt gemeinsam haben, dann istN1 ∨ N2 die Ebene im R3, die von den beiden Geraden aufgespanntwird.
2. Falls N1 und N2 keinen Schnittpunkt gemeinsam haben, dann ist N1 ∨N2 der gesamte Raum R3 (falls N1 und N2 nicht parallel) oder eineEbene, die durch den Vektor P1P2 und die Gerade N1 aufgespanntwird (falls N1 und N2 parallel).
3. Falls N1 und N2 mehr als einen Schnittpunkt gemeinsam haben, dannist N1 = N2 = N1 ∨N2.
Lemma 7.17. Seien N1 = P1 +U1 und N2 = P2 +U2 zwei affine Unterraumeeines affinen Raumes (A, V,+). Dann gilt:
N1 ∩N2 6= ∅ ⇔ −−→P1P2 ∈ U1 + U2.
144

Beweis:
(⇒) Sei N1∩N2 6= ∅ und P ∈ N1∩N2. Dann existieren u1 ∈ U1 und u2 ∈ U2
mitP1 + u1 = P = P2 + u2.
Fur v :=−−→P1P2 erhalten wir
P1 + u1 = P1 + (v + u2),
d.h. u1 = v + u2 und somit v = u1 − u2 ∈ U1 + U2.
(⇐) Sei v :=−−→P1P2 ∈ U1 +U2. Dann existieren u1 ∈ U1 und u2 ∈ U2, so dass
v = u1 + u2.
Somit gilt fur P := P1 + u1 ∈ N1, dass auch
P = P2 + (−v + u1) = P2 + (−u2) ∈ N2,
d.h. N1 ∩N2 6= ∅.
2
Satz 7.18. (Dimensionssatz fur affine Raume). Seien N1 = P1 + U1 undN2 = P2 +U2 zwei affine Unterraume eines affinen Raumes (A, V,+). Danngilt:
(i) Falls N1 ∩N2 6= ∅, dann gilt
dimK(N1 ∨N2) = dimK(N1) + dimK(N2)− dimK(U1 ∩ U2).
(ii) Falls N1 ∩N2 = ∅, dann gilt
dimK(N1 ∨N2) = 1 + dimK(N1) + dimK(N2)− dimK(U1 ∩ U2).
Beweis: Aufgrund von Lemma 7.16 wissen wir, dass
N1 ∨N2 = P1 + U, U = span −−→P1P2+ U1 + U2.
Daraus ergibt sich, dass
dimK(N1 ∨N2) = dimK(U).
145

(i) Da N1∩N2 6= ∅, so gilt aufgrund von Lemma 7.17, dass−−→P1P2 ∈ U1 +U2
und somit U = U1 +U2. Der Dimensionssatz fur Vektorraume fuhrt unszum Ergebnis
dimK(N1 ∨N2) = dimK(U1 + U2)
= dimK(U1) + dimK(U2)− dimK(U1 ∩ U2)
= dimK(N1) + dimK(N2)− dimK(U1 ∩ U2).
(ii) Da N1∩N2 = ∅, so gilt aufgrund von Lemma 7.17, dass−−→P1P2 /∈ U1 +U2
und somit dimK(U) = 1 + dimK(U1 + U2). Der Dimensionssatz furVektorraume liefert jetzt
dimK(N1 ∨N2) = 1 + dimK(U1) + dimK(U2)− dimK(U1 ∩ U2)
= 1 + dimK(N1) + dimK(N2)− dimK(U1 ∩ U2).
2
7.2 Affine Basen, affine Koordinaten
Sei im Folgenden (A, V,+) ein affiner Raum.
Definition 7.19. Seien P0, ..., Pn ∈ A. Dann heißen P0, ..., Pn affin un-abhangig, falls die Vektoren
−−→P0P1,
−−→P0P2, , ...,
−−−→P0Pn,
linear unabhangig sind. Bilden die Vektoren −−→P0P1,−−→P0P2, , ...,
−−−→P0Pn, eine
Basis, dann nennt man die Menge
P = P0, P1, ..., Pneine affine Basis von A.
Definition 7.20. Sei P = P0, P1, ..., Pn eine affine Basis von A und P ∈A. Dann nennt man die eindeutig bestimmten Skalare cj ∈ K mit
−−→P0P =
n∑j=1
cj−−→P0Pj
die affinen Koordinaten von P bezuglich der affinen Basis P von A. DieKoordinatendarstellung des Punktes P bezeichnen wir mitc1
...cn
aff
.
146

Beispiel:
1. Wir betrachten den affinen Raum Kn. Dann bilden die Punkte
P0 =
0...0
aff
, P1 =
1...0
aff
, . . . , Pn =
0...1
aff
eine affine Basis (die sogenannte affine Standardbasis) des affinen Rau-mes Kn, denn die Vektoren
−−→P0P1 =
1...0
, . . . ,−−−→P0Pn =
0...1
bilden eine Basis (die Standardbasis) des Vektorraumes Kn.
2. Wir betrachten den affinen Raum R2. Dann bilden die Punkte
P0 =
(10
), P1 =
(12
), P2 =
(23
)eine affine Basis des affinen Raumes R2, denn die Vektoren
−−→P0P1 =
(02
)und
−−→P0P2 =
(13
)bilden eine Basis des Vektorraumes R2.
3. Sei Q ∈ R2 und habe bezuglich der Standardbasis die affinen Koordi-naten ( 4
6 )aff. Da
4
(10
)+ 6
(01
)=
(46
)= −3
(02
)+ 4
(13
),
so sind ( −34 )aff die Koordinaten vonQ bezuglich der affinen Basis P0, P1, P2
aus 2.
7.3 Affine Abbildungen
Definition 7.21. Seien (A1, V1,+) und (A2, V2,+) zwei affine Raume. EineAbbildung f : A1 → A2 heißt affin, falls ein Punkt P ∈ A1 existiert, so dass−→fP : V1 → V2 mit
−→fP (−→PQ) =
−−−−−−→f(P )f(Q) ∀Q ∈ A1
linear ist.
147

Lemma 7.22. Die Definition einer affinen Abbildung f : A1 → A2 ist un-abhangig von dem ausgezeichneten Punkt P ∈ A1.
Beweis: Seien P,R ∈ A1 beliebig. Wir zeigen, dass fP = fR. Fur jedesQ ∈ A1 gilt
fR(−→PQ) = fR(
−→PR +
−→RQ) = fR(−−→RP +
−→RQ)
= −fR(−→RP ) + fR(
−→RQ) = −−−−−−−→f(R)f(P ) +
−−−−−−→f(R)f(Q)
=−−−−−−→f(P )f(R) +
−−−−−−→f(R)f(Q) =
−−−−−−→f(P )f(Q) = fP (
−→PQ).
2
Bemerkung: Aufgrund von Lemma 7.22 konnen wir die Vektorraumabbil-
dung−→fp einer affinen Abbildung f einfach mit
−→f bezeichnen. Dabei gilt dann
−→f (−→PQ) =
−−−−−−→f(P )f(Q) und f(Q) = f(P ) +
−→f (−→PQ).
Definition 7.23. Seien (A, V,+) und (B,W,+) zwei affine Raume. Danndefinieren wir
A(V,W ) := f : A→ B | f ist affin.A(V ) := A(V, V ) := f : A→ A | f ist affin.
GA(V ) := f ∈ A(V ) | f ist bijektiv.
Bemerkung: (GA(V ), ) ist eine Gruppe. Sie heißt die affine Gruppe zumK-Vektorraum V .
Lemma 7.24. Seien (A1, V1,+), (A2, V2,+) zwei affine Raume und f : A1 →A2 eine affine Abbildung. Sei N1 = P1 + U1 ein affiner Unterraum von A1.Dann ist
f(N1) = f(P ) ∈ A2 |P ∈ A1ein affiner Unterraum von A2.
Beweis: Offenbar gilt fur jedes u1 ∈ U1, dass
f(P1 + u1) = f(P ) +−→f (u1) ∈ A2
und damit
f(N1) = f(P1 + U1) = f(P ) +−→f (U1) ⊆ A2.
148

2
Bemerkung: Affine Abbildungen uberfuhren also affine Unterraume wie Ge-raden, Ebenen etc. wieder in affine Unterraume. Falls eine affine Abbildungbijektiv ist, dann werden Geraden in Geraden und Ebenen in Ebenen etc.uberfuhrt.
Beispiel:
1. Translationen (Verschiebungen).Sei (A, V,+) ein affiner Raum und ein v ∈ V fixiert. Dann ist dieAbbildung fv : A→ A mit
fv(P ) := P + v
eine bijektive affine Abbildung. Wir nennen diese Abbildung eine Trans-lation um den Vektor v.Es gilt
−→fv = idV , denn fur alle P,Q ∈ A gilt
fv(Q) = Q+ v = P +−→PQ+ v = fv(P ) +
−→PQ, d.h.
−−−−−−−→fv(P )fv(Q) =
−→PQ
und somit
−→fv (−→PQ) =
−−−−−−−→fv(P )fv(Q) =
−→PQ.
2. Zentrische Streckungen.Sei (A, V,+) ein affiner Raum und ein Z ∈ A fixiert. Dann ist dieAbbildung fZ : A→ A mit
fZ(P ) := Z + λ · −→ZP, λ ∈ K, λ 6= 0
eine bijektive affine Abbildung (UA). Wir nennen diese Abbildung einezentrische Streckung mit dem Zentrum Z und dem Streckungsfaktor λ.
7.4 Hauptsatz der affinen Geometrie
Definition 7.25. Drei Punkte P,Q,R eines affinen Raumes (A, V,+) heißenkollinear, falls eine affine Gerade N ⊆ A existiert, so dass P,Q,R ∈ N .
Lemma 7.26. Seien (A, V,+) ein affiner Raum, f : A → A eine bijektive,affine Abbildung und P,Q,R ∈ A kollinear. Dann sind auch die Bildpunktef(P ), f(Q), f(R) kollinear.
149

Satz 7.27. (Hauptsatz der affinen Geometrie). Sei V ein reeller Vektorraumund (A, V,+) ein affiner Raum der Dimension ≥ 2. Falls f : A → A einebijektive Abbildung ist, die je drei kollineare Punkte P,Q,R ∈ A in dreikollineare Punkte f(P ), f(Q), f(R) abbildet, so ist f eine affine Abbildung.
Beweisidee:
Schritt 1. Falls P,Q,R ∈ A affin unabhangig sind, so sind auch f(P ), f(Q), f(R)affin unabhangig. Man zeigt dies indirekt. Falls f(P ), f(Q), f(R) affinabhhangig sind, dann
Schritt 2. Ist N eine affine Gerade in A, so ist auch f(N) eine affine Geradein A. Man zeigt dafur, dass
f(P + span v) = f(P ) + span −→f (v).
Schritt 3. Sind N1 und N2 zwei parallele Geraden in A, so sind auch f(N1)und f(N2) parallel. Man zeigt dafur, dass aus
N1 = P1 + span v, N2 = P2 + span v
folgt, dass
f(N1) = f(P1) + span w, f(N2) = f(P2) + span w
mit w =−−−−−−−−−−→f(P1)f(P1 + v).
Schritt 4. Die einzige Abbildung ϕ : R→ R, die additiv und multiplikativist, d.h.
∀x, y ∈ R : ϕ(x+ y) = ϕ(x) + ϕ(y) und ϕ(x · y) = ϕ(x) · ϕ(y),
ist die identische Abbildung id.
Schritt 5. Die Abbildung−→f : V → V ist linear:
(i) Es gilt die Additivitat von−→f fur linear unabhangige Vektoren
x, y ∈ V :Die Eckpunkte P , P + x, P + y und P + x+ y formen ein Paral-lelogramm. Aufgrund der Schritte 1-3 wissen wir, dass dann auchdie Punkte f(P ), f(P + x), f(P + y) und f(P + x + y) ein Par-allelogramm darstellen, woraus
−→f (x+ y) =
−→f (x) +
−→f (y)
folgt.
150

(ii) Es gilt die Homogenitat von−→f :
Fur fixiertes P ∈ A und fixiertes x ∈ V mit x 6= O betrachten wirdie Abbildung ϕ : R→ R definiert durch ϕ(λ) := λ′ und
f(P ) +−→f (λx) = f(P ) + λ′
−→f (x).
Die Funktion ϕ ist wohldefiniert, da N = P+span x eine Geradeund damit auch
f(N) = f(P ) +−→f (span x) = f(P ) + span −→f (x)
eine Gerade ist. Die Abbildung ϕ ist additiv und multiplikativ.Mit Schritt 4 folgt daraus
−→f (λx) = λ
−→f (x).
(iii) Fur linear abhangige Vektoren x, y ∈ V finden wir ein λ ∈ R mit
y = λx oder x = λy und es folgt die Additivitat von−→f mit Hilfe
von (ii).
2
8 Euklidische und unitare Vektorraume
Wir wollen im Folgenden Vektorraume mit einem Skalarprodukt betrachten.Es hat den Vorteil, dass man damit Langen und Winkel messen kann. ReelleVektorraume mit einem Skalarprodukt heißen euklidische Vektorraume.Komplexe Vektorraume mit einem Skalarprodukt nennt man unitare Vek-torraume.
Zunachst interessieren wir uns fur den reellen Vektorraum Rn und den kom-plexen Vektorraum Cn. Das kanonische Skalarprodukt im Rn ist gegebendurch
〈x, y〉 := xTy =n∑i=1
xiyi
fur alle x, y ∈ Rn. Das Skalarprodukt hat die folgenden Eigenschaften:
(i) linear in jeder Komponente, d.h.
〈x1 + x2, y〉 = 〈x1, y〉+ 〈x2, y〉, 〈λx, y〉 = λ〈x, y〉und
〈x, y1 + y2〉 = 〈x, y1〉+ 〈x, y2〉, 〈x, λy〉 = λ〈x, y〉fur alle x, y, x1, y1, x2, y2 ∈ Rn und λ ∈ R.
151

(ii) symmetrisch, d.h. 〈x, y〉 = 〈y, x〉 fur alle x, y ∈ Rn.
(iii) positiv definit, d.h. 〈x, x〉 ≥ 0 fur alle x ∈ Rn sowie 〈x, x〉 = 0⇔ x = 0.
Definition 8.1. Sei V ein beliebiger Vektorraum uber dem Korper R. Dannheißt eine Abbildung 〈·, ·〉 von V × V nach R ein Skalarprodukt oder in-neres Produkt auf V , falls die obigen Eigenschaften (i)-(iii) erfullt sind.Vektorraume uber dem Korper R mit einem Skalarprodukt nennen wir eu-klidische Vektorraume.
Mit Hilfe des Skalarproduktes erhalten wir die euklidische Norm
‖x‖ :=√〈x, x〉 =
√x2
1 + x22 + ...+ x2
n.
Sie stellt den Abstand eines Punktes x im Rn vom Nullpunkt dar. Der Ab-stand zweier Punkte x, y ∈ Rn ist durch
d(x, y) = ‖x− y‖ =√
(x1 − y1)2 + (x2 − y2)2 + ...+ (xn − yn)2
gegeben.
Lemma 8.2. (Cauchy-Schwarz’sche Ungleichung) Fur alle x, y ∈ Rn
gilt|〈x, y〉| ≤ ‖x‖ · ‖y‖.
Die Gleichheit gilt genau dann, wenn x und y linear abhangig sind.
Beweis: Da die Wurzelfunktion momoton ist, so genugt es zu zeigen, dass
|〈x, y〉|2 ≤ ‖x‖2 · ‖y‖2.
Dies ist aquivalent zu(n∑i=1
xiyi
)2
≤(
n∑i=1
x2i
)(n∑i=1
y2i
).
Durch Ausmultiplikation sehen wir, das dies gerade folgende Ungleichungbedeutet
n∑i=1
n∑j=1
xiyixjyj ≤n∑i=1
n∑j=1
x2i y
2j
was nach Umstellen und Multiplikation mit 2 wiederum aquivalent zu
0 ≤ 2n∑i=1
n∑j=1
x2i y
2j − 2
n∑i=1
n∑j=1
xiyixjyj
152

ist. Dies konnen wir auch als
0 ≤n∑i=1
n∑j=1
x2i y
2j − 2
n∑i=1
n∑j=1
xiyjxjyi +n∑i=1
n∑j=1
x2jy
2i
schreiben und wir erhalten die aquivalente Ungleichung
0 ≤∑
1≤i,j≤n
(xiyj − xjyi)2
ist. Dies ist offenbar immer der Fall und die Gleichheit gilt genau dann, wenn
xiyj = xjyi ∀ 1 ≤ i, j ≤ n.
Dies bedeutet aber gerade, dass x und y linear abhangig sind (UA). 2
Die Cauchy-Schwarzsche Ungleichung zeigt uns, dass fur alle Vektoren (6= 0)gilt:
−1 ≤ 〈x, y〉‖x‖ · ‖y‖ ≤ 1.
Somit existiert genau ein ϕ ∈ [0, π), so dass
cos(ϕ) =〈x, y〉‖x‖ · ‖y‖ .
Wir definieren diese Zahl ϕ als den Winkel zwischen den Vektoren x und y.Dies entspricht auch der geometrischen Vorstellung, die wir von Winkeln inder Ebene haben. Wir betrachten dazu zwei Vektoren x und y im R2. Wirskalieren diese so, dass sie die Lange 1 besitzen, d.h. wir bilden
x′ :=x
‖x‖ , y′ :=y
‖y‖ .
Wir betrachten nun Abbildung 4.3 und erhalten fur die dort eingefuhrtenWinkel α und β, dass
x′ = (cosα, sinα), y′ = (cos β, sin β).
Per Additionstheorem erhalten wir
cos(β − α) = cos β cosα + sin β sinα =< x′, y′ >,
d.h.
cos(ϕ) = 〈x′, y′〉 =〈x, y〉‖x‖ · ‖y‖
153

Abbildung 4.3: Winkel ϕ zwischen zwei Vektoren x′ und y′ der Lange 1.
fur ϕ = β − α.
Offenbar ist das Skalarprodukt 〈x, y〉 = 0 genau dann, wenn ϕ = π/2, d.h.wenn die Vektoren x und y senkrecht aufeinander stehen.
Das kanonische Skalarprodukt im Cn ist gegeben durch
〈x, y〉 := xTy =n∑i=1
xiyi
fur alle x, y ∈ Cn. Das Skalarprodukt im Cn hat die folgenden Eigenschaften:
(i) semilinear in der ersten Komponente und linear in der zweiten Kom-ponente, d.h.
〈x1 + x2, y〉 = 〈x1, y〉+ 〈x2, y〉, 〈λx, y〉 = λ〈x, y〉
und〈x, y1 + y2〉 = 〈x, y1〉+ 〈x, y2〉, 〈x, λy〉 = λ〈x, y〉
fur alle x, y, x1, y1, x2, y2 ∈ Cn und λ ∈ C.
(ii) 〈x, y〉 = 〈y, x〉 fur alle x, y ∈ Cn.
(iii) positiv definit, d.h. 〈x, x〉 ≥ 0 fur alle x ∈ Cn sowie 〈x, x〉 = 0⇔ x = 0.
Definition 8.3. Sei V ein beliebiger Vektorraum uber dem Korper C. Dannheißt eine Abbildung 〈·, ·〉 von V ×V nach C ein Skalarprodukt oder inne-res Produkt auf V , falls die obigen Eigenschaften (i)-(iii) erfullt sind. Vek-torraume uber dem Korper C mit einem Skalarprodukt nennen wir unitareVektorraume.
154

Auch hier bekommen wir mit
‖x‖ :=√〈x, x〉
eine Norm in Cn.
8.1 Orthogonalitat
Definition 8.4. Sei V ein euklidischer oder unitarer Vektorraum.
(i) Zwei Vektoren u und v aus V heißen orthogonal, falls 〈u, v〉 = 0.
(ii) Zwei Untervektorraume U und W von V heißen orthogonal, falls
〈u,w〉 = 0 fur alle u ∈ U, w ∈ W.
(iii) Zu einer Teilmenge U von V bezeichnen wir den Raum
U⊥ := v ∈ V : ∀u ∈ U : 〈u, v〉 = 0
als das orthogonale Komplement von U .
Bemerkung 8.5. Falls V ein euklidischer oder unitarer Vektorraum ist,so ist das orthogonale Komplement U⊥ einer Teilmenge U von V stets einUnterraum von V . (UA)
Bemerkung: Sei V ein endlich dimensionaler Vektorraum V . Dann gilt furjeden Unterraum U ⊆ V gilt (U⊥)⊥ = U .Beweis: Sei x ∈ (U⊥)⊥. Dann gilt 〈x, y〈= 0 fur alle y ∈ U⊥, d.h. 2
Beispiele:
1. V = R2, u =
(11
), v =
(1−1
). Es gilt 〈u, v〉 = 1 · 1 + 1 · (−1) = 0, d.h.
u und v sind senkrecht zueinander.
2. V = R3, U = span
101
,
201
und W = span
010
. Dann sind W
und U orthogonal, da fur alle u ∈ U und w ∈ W gilt, dass
〈u,w〉 = u1 · 0 + 0 · w2 + u3 · 0 = 0.
155

3. V = R3, U =
400
. Dann gilt U⊥ = span
010
,
001
. Es gilt in
dem Beispiel noch U ⊕W = V mit W = U⊥. Man schreibt dann auchU f⊥W = V .
Lemma 8.6. Sei V = Rn und A ∈M(m× n,R). Dann gilt fur das kanoni-sche Skalarprodukt:
(i) Jeder Vektor u ∈ kerA ist orthogonal zu jedem Zeilenvektor von A.
(ii) Jeder Vektor w ∈ kerAT ist orthogonal zu jedem Spaltenvektor von A.
Beweis:
(i) Sei u ∈ kerA, d.h. Au = 0. Dann gilt fur jede Zeile i von A, dass
n∑j=1
aijuj = 0,
d.h. 〈ai, u〉 = 0 fur alle Zeilenvektoren ai von A.
(ii) Dies folgt unmittelbar aus (i), da die Spaltenvektoren von A gerade dieZeilenvektoren von AT sind.
2
Lemma 8.7. Sei V = Rn und A ∈M(m× n,R). Dann gilt fur das kanoni-sche Skalarprodukt:
kerAT = (im A)⊥.
Beweis: Ubungsaufgabe 2
Definition 8.8. Sei V ein euklidischer oder unitarer Vektorraum. Eine BasisB von V heißt Orthonormalbasis, falls 〈u, v〉 = 0 fur alle u 6= v ∈ B und‖u‖ = 1 fur alle u ∈ B.
Die Standardbasis e1, ..., en ist eine Orthonormalbasis in Rn. Eine sehrhilfreiche Eigenschaft von Orthonormalbasen ist in folgendem Lemma be-schrieben.
Lemma 8.9. Sei u1, ..., un eine Orthonormalbasis eines endlich dimensio-nalen euklidischen oder unitaren Vektorraums V und v ∈ V beliebig. Danngilt
v =n∑i=1
ciui mit ci := 〈ui, v〉.
156

Beweis: Sei v =∑n
i=1 ciui die Basisdarstellung von v. Dann sind die Koef-fizienten ci eindeutig bestimmt und es gilt fur alle j = 1, ..., n, dass
〈uj, v〉 = 〈uj,n∑i=1
ciui〉 =n∑i=1
ci〈uj, ui〉 = cj.
2
Satz 8.10. (Orthonormalisierungssatz nach Gram-Schmidt) Sei V ein end-lich dimensionaler euklidischer oder unitarer Vektorraum und W ein Unter-raum von V mit der Orthonormalbasis w1, ..., wm. Dann existieren wm+1, ..., wnin V , so dass w1, ..., wm, wm+1, ..., wn eine Orthonormalbasis von V ist.
Beweis: Falls W = V , so braucht man keine weitere Erganzung. Sei nunW ⊂ V und w ∈ V \W . Dann sei
v :=m∑i=1
〈wi, w〉wi.
Damit gilt fur u := w − v, dass u⊥W , denn
〈wj, u〉 = 〈wj, w −m∑i=1
〈wi, w〉wi〉 = 〈wj, w〉 −m∑i=1
〈wi, w〉〈wj, wi〉
= 〈wj, w〉 −m∑i=1
〈wi, w〉δij = 〈wj, w〉 − 〈wj, w〉 = 0
fur alle Basisvektoren wj ∈ W . Somit gilt fur alle cj ∈ K, dass
〈m∑j=1
cjwj, u〉 =m∑j=1
cj〈wj, u〉 = 0,
d.h. u⊥W . Nun setzen wir wm+1 := 1‖u‖u. Dann gilt auch wm+1⊥W , denn
fur alle w ∈ W gilt
〈w,wm+1〉 = 〈w, 1
‖u‖u〉 =1
‖u‖〈w, u〉 = 0.
und konnen auf die gleiche Weise sukzessive wm+2, ..., wn konstruieren, sodass w1, ..., wm, wm+1, ..., wn eine Orthonormalbasis von V ist. 2
Korollar 8.11. Jeder endlich dimensionale euklidische oder unitare Vektor-raum V 6= O besitzt eine Orthonormalbasis.
157

Dazu startet man einfach mit einem beliebigen Vektor von v ∈ V mit derNorm 1 und erganzt diesen zu einer Basis von V .
Korollar 8.12. Sei V ein endlich dimensionaler euklidischer oder unitarerVektorraum und U ein Unterraum von V . Dann gilt
U f⊥ U⊥ = V und dimU + dimU⊥ = dimV.
Beweis: Sei B = u1, ..., um eine Orthonormalbasis von U . Dann erganzenwir diese zu einer Orthonormalbasis u1, ..., um, um+1, ..., un von V . Danngilt U⊥ = spanum+1, ..., un, denn:(⊆) Sei v ∈ U⊥ beliebig. Da u1, ..., um, um+1, ..., un eine Orthonormalbasisvon V ist, so gilt
v =n∑i=1
ciui mit ci := 〈ui, v〉.
Da v ∈ U⊥, so gilt ci = 0 fur alle i = 1, ...,m. Also haben wir
v =n∑
i=m+1
ciui ∈ spanum+1, ..., un.
(⊇) Sei v ∈ spanum+1, ..., un. Dann existieren cm+1, ..., cn, so dass
v =n∑
j=m+1
cjuj.
Sei u ∈ U beliebig. Dann existieren c1, ..., cm, so dass
u =m∑i=1
ciui.
Dann gilt
〈u, v〉 = 〈m∑i=1
ciui,
n∑j=m+1
cjuj〉 =m∑i=1
n∑j=m+1
cicj〈ui, uj〉 = 0,
d.h. v ∈ U⊥. Nun folgt unmittelbar die Behauptung. 2
Definition 8.13. Sei K = R oder K = C. Eine Matrix M ∈ M(n × n,K)heißt orthogonal, falls die Spalten von M eine Orthonormalbasis bilden,d.h. falls MH = M−1, wobei MH = M>.Ein Projektor P ∈ M(n × n,K) heißt orthogonaler Projektor oder Or-thoprojektor, falls PH = P ist, d.h. P> = P .
158

Bemerkung 8.14. Man beachte, dass eine orthogonale Matrix per Definitionstets regular ist. Ein orthogonaler Projektor oder (zur besseren Abgrenzung)ein Orthoprojektor ist i.a. nicht regular.
Beispiel: Sei K = C3. Dann ist
M =1√2
(i −ii i
)eine orthogonale Matrix, denn
MHM =1√2
(−i −ii −i
)1√2
(i −ii i
)= I.
Daneben ist
P :=
12
0 −12
0 1 0−1
20 1
2
ein Orthoprojektor. Er projiziert alle Vektoren v ∈ C3 senkrecht auf die Ebe-
ne, die durch die Vektoren(
10−1
)und
(010
)aufgespannt wird.
Lemma 8.15. Jede orthogonale Matrix M ∈M(n×n,K) bewirkt eine Kon-gruenztransformation im Kn, d.h. die Lange von Vektoren und der Winkelzwischen je zwei Vektoren bleibt erhalten.
Beweis: Sei M ∈M(n× n,K) orthogonal und v ∈ Kn beliebig. Dann gilt
‖Mv‖2 = 〈Mv,Mv〉 = (Mv)HMv = vHMHMv = vHv = 〈v, v〉 = ‖v‖2,
d.h. ‖Mv‖ = ‖v‖. Damit haben wir gezeigt, dass die Lange von v erhaltenbleibt.
Fur v, w ∈ V mit v 6= O und w 6= O gilt:
〈Mv,Mw〉‖Mv‖‖Mw‖ =
(Mv)HMw√(Mv)H(Mv)
√(Mw)H(Mw)
=vHw√
vHv√wHw
=〈v, w〉‖v‖‖w‖ ,
d.h. der Winkel zwischen Mv und Mw ist gleich dem Winkel zwischen v undw. 2
Lemma 8.16. Sei V = Kn fur K = R oder K = C mit dem Standard-Skalarprodukt. Dann projiziert jeder Orthoprojektor P ∈ M(n × n,K) dieVektoren v ∈ V senkrecht auf im P .
159

Beweis: Das Standardskalarprodukt in Cn lautet
〈x, y〉 =n∑i=1
xiyi = xHy,
wobei xH := x>. Da x = x fur x ∈ Rn, so genugt es, den Satz fur K = C zubeweisen. Es ist zu zeigen, dass
∀v ∈ V : 〈v − Pv, Pv〉 = 0
Offenbar gilt fur alle v ∈ V :
〈v − Pv, Pv〉 = (v − Pv)HPv = vHPv − vHPHPv
= vHPv − vHPPv = vHPv − vHPv = 0.
2
Anmerkung: Ein Projektor P ∈ M(n × n,K) projiziert alle Vektoren v ∈Kn auf einen Unterraum von Kn, d.h. Pv ∈ Kn fur alle v ∈ Kn. So projiziertbeispielsweise
P =
1 0 00 1 00 0 0
den Vektor v =
v1
v2
v3
auf den Vektor Pv =
v1
v2
0
∈ K3.
Demgegenuber spricht man bei der Abbildung p : K3 → K2 mit
p(v) =
(v1
v2
)von einer Projektion.
Lemma 8.17. Sei A ∈M(m×n,K) mit K = R oder K = C. Dann gilt furAH := AT, dass
(i) kerAHA = kerA und kerAAH = kerAH ,
(ii) im AHA = im AH und im AAH = im A.
Beweis:
(i) Die zweite Gleichung kerAAH = kerAH folgt aus der ersten GleichungkerAHA = kerA, wenn wir anstelle von A die Matrix AH nehmen undbeachten, dass (AH)H = A. Wir zeigen nun, dass kerAHA = kerA.
160

(⊇) Klar, da AHAx = 0, falls Ax = 0.
(⊆) Sei x ∈ kerAHA. Dann gilt
〈Ax,Ax〉 = (Ax)HAx = xHAHAx = 0
und somit Ax = 0, d.h. x ∈ kerA.
(ii) Die zweite Gleichung im AAH = im A folgt wieder aus der ersten Glei-chung im AHA = im AH , wenn wir anstelle von A die Matrix AH
betrachten.
Wir zeigen nun, dass im AHA = im AH . Zunachst ist trivialer Weiseim AHA ⊆ im AH . Zudem gilt wegen (i)
rank (AHA) = n− def(AHA) = n− def(A)
= rank (A) = rank (A>) = rank (AH)
und somit dimK(im AHA) = dimK(im AH). Mit im AHA ⊆ im AH
folgt nun im AHA = im AH .
2
Satz 8.18. Sei V ein euklidischer oder unitarer Vektorraum. Seien U und WUnterraume von V . Falls U f⊥W = V , dann existiert stets ein OrthoprojektorP auf U langs W , d.h. ein Orthoprojektor P mit im P = U und kerP = W .
Beweis: Sei u1, ..., u` eine ONB von U . Wir definieren die Matrizen A :=(u1|u2|...|u`) und P := AAH . Nun zeigen wir, dass P ein Orthoprojektor aufU langs W ist.
(i) Nach Konstruktion von A gilt
(AHA)ij = (uHi uj)ij = (〈ui, uj〉)ij = (δij)ij = I.
Somit erhalten wir
P 2 = AAHAAH = AIAH = AAH = P,
d.h. P ist ein Projektor.
(ii) P ist Orthoprojektor, da
PH = (AAH)H = (AH)HAH = AAH = P.
(iii) U = im A = im AAH = im P wegen Lemma 8.17.
161

(iv) W = U⊥ = (im A)⊥ = kerAH = kerAAH = kerP wegen Lemma 8.17.Die Gleichung (im A)⊥ = kerAH wird klar, wenn man beachtet, dass
(im A)⊥ = z ∈ Km : 〈z, y〉 = 0 ∀ y ∈ im A= z ∈ Km : 〈z, Ax〉 = 0 ∀x ∈ Kn= z ∈ Km : zHAx = 0 ∀x ∈ Kn= z ∈ Km : zHA = 0= z ∈ Km : (AHz)H = 0 = z ∈ Km : AHz = 0 = kerAH .
2
Falls U und W nur eine direkte Summe bilden, dann gilt folgender Satz.
Satz 8.19. Sei V ein euklidischer oder unitarer Vektorraum. Seien U undW Unterraume von V . Falls U ⊕W = V , dann existiert stets ein ProjektorP auf U langs W .
Beweis: Da U ⊕W = V , so existiert fur jedes v ∈ V genau ein u ∈ U undgenau ein w ∈ W , so dass v = u + w. Wir definieren nun die Abbildungp : V → U als p(v) = u. Dann ist p linear, denn
p(v1 + v2) = u1 + u2 = p(v1) + p(v2) fur v1 = u1 + w1, v2 = u2 + w2
undp(λv) = λu = λp(v) fur v = u+ w, λ ∈ K.
Nach Konstruktion gilt p(u) = u fur alle u ∈ U und p(w) = 0 fur alle w ∈ W .Zudem gilt fur alle v ∈ V , dass
p(p(v)) = p(u) = u = p(v) fur v = u+ w.
Eine solche Abbildung p nennt man eine Projektion auf U langs W . Wirdefinieren nun P := (u1|u2|...|un), wobei n = dimK V und ei = ui + wi furalle i = 1, ..., n. Wir zeigen nun, dass P ein Projektor auf U langs W ist. Esgilt Pei = ui = p(ei) und somit
P 2ei = Pp(ei) = p(Pei) = p(p(ei)) = p(ui) = ui = Pei
fur alle i = 1, ..., n, d.h. P 2 = P . Außerdem gilt Pv = p(v) fur alle v ∈ V , dap linear ist. Nun haben wir noch
im P = L(u1, ..., un) ⊆ U.
162

Falls u ∈ U , so gilt u = p(u) = Pu ∈ im P , also im P = U . Falls w ∈ W , sogilt Pw = p(w) = 0, d.h. W ⊆ kerP . Zudem gilt
dimKW = n− dimK U = n− dimK im P = dimK kerP.
Somit gilt auch W = kerP . 2
Bemerkung 8.20. Die Projektoren in den Satzen 8.18 und 8.19 sind eindeu-tig bestimmt. Dies kann man sich leicht in folgenden Schritten klar machen.
(i) Falls P ein Projektor auf einen Untervektorraum U von V ist, so giltPu = u genau dann, wenn u ∈ U = im P .Denn fur u ∈ U = im P existiert ein x ∈ Kn mit dimK V = n, so dassu = Px und somit
Pu = P 2x = Px = u.
Falls Pu = u, so gehort u trivialer Weise zu im P = U .
(ii) Falls P ein Projektor ist, so ist Q = I − P auch ein Projektor.Denn:
Q2 = (I − P )(I − P ) = I − 2P + P 2 = I − 2P + P = I − P = Q
(iii) Falls P ein Projektor ist, so gilt
im P = ker(I − P ) und kerP = im (I − P ).
Denn x ∈ im P ⇔ x = Px ⇔ (I − P )x = 0 ⇔ x ∈ ker(I − P ). DieGleichung ker P = im (I − P ) folgt aus im P = ker(I − P ), wenn wirden Projektor P := I − P betrachten.
(iv) Falls V = U ⊕W und P1, P2 Projektoren auf U langs W sind, danngilt fur alle x ∈ Kn, dass x ∈ im P1 = U = imP2 und somit
P1x = P2P1x = P2x− P2(I − P1)x = P2x,
da im (I −P1) = kerP1 = W = kerP2. Da x beliebig war, so haben wirP1 = P2.
9 Zerlegungen
9.1 Diagonalisierung
Definition 9.1. Ein Endomorhismus ϕ heißt diagonalisierbar, falls eseine Basis U aus Eigenvektoren gibt.
163

Definition 9.2. Eine Matrix A ∈ M(n × n,K) heißt diagonalisierbar,falls es eine regulare Matrix T ∈ M(n × n,K) gibt, so dass T−1AT =: Deine Diagonalmatrix ist.
Lemma 9.3. Eine Matrix A ∈M(n×n,K) ist genau dann diagonalisierbar,wenn der Endomorhismus ϕ : Kn → Kn mit ϕ(v) := Av diagonalisierbarist.
Beweis: Sei E = e1, ..., en die Standardbasis von Kn.
1. Sei A diagonalisierbar. Dann existiert eine regulare Matrix T und eineDiagonalmatrix D, so dass T−1AT = D. Sei vi := Tei fur i = 1, ..., n.Dann ist v1, ..., vn eine Basis von V . Zudem ist fur alle i = 1, ..., nder Vektor vi ein Eigenvektor zum Eigenwert dii, denn
ϕ(vi) = Avi = TDT−1(Tei) = TDei
= T (diiei) = diiTei = diivi.
d.h. ϕ mit ϕ(v) = Av ist diagonalisierbar.
2. Sei ϕ mit ϕ(v) = Av diagonalisierbar. Dann existiert eine Basis U =v1, ..., vn aus Eigenvektoren von ϕ. Sei D = diag(λ1, ..., λn), wobei λider zum Eigenvektor vi gehorige Eigenwert ist. Dann gilt fur i = 1, ..., n,dass Avi = ϕ(vi) = λivi und somit fur
T := (v1|v2|...|vn),
dass AT = TD und somit T−1AT = D. Da U eine Basis ist, so ist Tregular und die Behauptung bewiesen.
2
Beispiel: Wir betrachten
A =
(1 2−1 4
).
Dann sind die Nullstellen des charakteristischen Polynoms
pA(λ) = det(A− λI) = det
(1− λ 2−1 4− λ
)= (1− λ)(4− λ) + 2 = λ2 − 5λ+ 6 = (λ− 2)(λ− 3)
gerade λ1 = 2 und λ2 = 3. Also hat A genau zwei Eigenwerte, namlich 2 und3. Die dazu gehorigen Eigenraume sind
Eig(A, 2) = ker(A− 2I) = ker
(−1 2−1 2
)= span
(21
)
164

und
Eig(A, 3) = ker(A− 3I) = ker
(−2 2−1 1
)= span
(11
).
Die Eigenvektoren ( 21 ) und ( 1
1 ) bilden eine Basis des R2. Somit ist A dia-gonalisierbar. Wir fugen die Eigenvektoren spaltenweise zu einer Matrix Tzusammen, d.h.
T =
(2 11 1
).
Dann gilt
T−1AT = D =
(2 00 3
).
Lemma 9.4. Wenn A ∈ M(n× n,K) diagonalisierbar ist, so sind die Ele-mente auf der Hauptdiagonalen von D gerade die Eigenwerte von A, wobeiA = TDT−1 mit T regular.
Beweis: Es gelten folgende Aquivalenzen:
λ ist ein EW von A⇔ ∃ v ∈ Kn : v 6= 0 ∧ Av = λv
⇔ ∃ v ∈ Kn : v 6= 0 ∧ TAT−1Tv = λTv
⇔ ∃ v ∈ Kn : v 6= 0 ∧ DTv = λTv
⇔ ∃w ∈ Kn : w 6= 0 ∧ Dw = λw.
Offenbar ist λ genau dann ein EW von D, falls λ ein Wert auf der Haupt-diagonalen von D ist. 2
Definition 9.5. Zwei Matrizen A, B ∈ M(n× n,K) heißen ahnlich, fallses eine eine regulare Matrix T ∈M(n× n,K) gibt, so dass B = TAT−1.
Lemma 9.6. Zwei zueinander ahnliche Matrizen A und B haben das gleichecharakteristische Polynom. Damit stimmen ihre Eigenwerte uberein. FallsB = TAT−1 mit T regular, dann gilt
Eig(B, λ) = vB ∈ Kn | vB = TvA ∧ vA ∈ Eig(A, λ) =: TEig(A, λ)
fur alle Eigenwerte λ.
Beweis: Seien A und B ahnliche Matrizen mit A = TBT−1 und T regular.Dann gilt:
pA(λ) = det(A− λI) = det(TBT−1 − λTT−1)
= det(T (B − λI)T−1) = det(T ) det(B − λI) det(T−1)
= det(T ) det(B − λI)(det(T ))−1 = det(B − λI) = pλ(B)
165

sowie
vB ∈ Eig(B, λ)⇔ BvB = λvB ⇔ TAT−1vB = λvB
⇔ AT−1vB = λT−1vBvA=T−1vB⇔ AvA = λvA ⇔ vA ∈ Eig(A, λ)
Somit gilt vB = TvA, falls vA ∈ Eig(A, λ) und vB ∈ Eig(B, λ). 2
Ein einfaches Kriterium fur die Diagonalisierbarkeit eines Endomorphismus’ϕ oder einer Matrix A liefert der folgende Satz.
Satz 9.7. Sei V ein endlich-dimensionaler K-Vektorraum und ϕ ∈ EndK(V ).Dann sind folgende Bedingungen aquivalent:
(i) ϕ ist diagonalisierbar.
(ii) Das charakteristische Polynom pϕ(λ) zerfallt in Linearfaktoren und esgilt
dimKEig(ϕ, λi) = ri ∀ 1 ≤ i ≤ k
wobeipϕ(λ) = ±(λ− λ1)r1(λ− λ2)r2 ...(λ− λk)rk
mit paarweise verschiedenen λ1, λ2, ..., λk.
(iii) Sind λ1, λ2, ..., λk die paarweise verschiedenen Eigenwerte von ϕ, sogilt:
V = Eig(ϕ, λ1)⊕ Eig(ϕ, λ1)⊕ ...⊕ Eig(ϕ, λk).
Die Aussagen gelten auch fur Matrizen A ∈M(n× n,K) anstelle von ϕ mitV := Kn.
Bevor wir den Satz beweisen, zeigen wir noch zwei Lemmata. Zudem fuhrenwir noch eine nutzliche Definitionen ein.
Definition 9.8. Sei V ein endlich-dimensionaler K-Vektorraum und ϕ ∈EndK(V ). Sei λ∗ ein Eigenwert von ϕ. Dann heißt µ(pϕ, λ) = r die alge-braische Vielfachheit von λ∗, falls
pϕ(λ) = (λ− λ∗)r · q(λ),
wobei q(λ) ein Polynom mit q(λ∗) 6= 0 ist. Man nennt s = dimK Eig(ϕ, λ∗)die geometrische Vielfachheit von λ∗.Die Definitionen gelten entsprechend fur Matrizen A ∈M(n×n,K) anstellevon ϕ mit V := Kn.
166

Lemma 9.9. Sei V ein endlich-dimensionaler K-Vektorraum und ϕ ∈ EndK(V ).Seien λ1, ..., λk paarweise verschiedene Eigenwerte von ϕ. Dann gilt
Eig(ϕ, λ1) + ...+ Eig(ϕ, λk) = Eig(ϕ, λ1)⊕ ...⊕ Eig(ϕ, λk).
Die Aussage gilt auch fur Matrizen A ∈ M(n × n,K) anstelle von ϕ mitV := Kn.
Beweis: Fur k = 2 haben wir die Behauptung schon in Lemma 6.10 gezeigt.Wir beweisen die Behauptung nun per Induktion uber k. Nach Induktions-voraussetzung gilt
W := Eig(ϕ, λ1) + ...+ Eig(ϕ, λk−1) = Eig(ϕ, λ1)⊕ ...⊕ Eig(ϕ, λk−1).
Sei v ∈ W ∩ Eig(ϕ, λk). Dann ist v ein Eigenvektor zum Eigenwert λk, d.h.
ϕ(v) = λkv.
Sei Bi = vi1, ..., visi eine Basis von Eig(ϕ, λi) fur alle i = 1, ..., k − 1. Dav ∈ W , so existieren αij ∈ K, so dass
v =k−1∑i=1
si∑j=1
αijvij. (4.14)
Multiplizieren wir diese Gleichung mit λk, so erhalten wir
λkv =k−1∑i=1
si∑j=1
λkαijvij. (4.15)
Wenden wir ϕ auf die Gleichung (4.14) and, so bekommen wir
ϕ(v) =k−1∑i=1
si∑j=1
αijϕ(vij),
d.h.
λkv =k−1∑i=1
si∑j=1
αijλivij. (4.16)
Durch Subtraktion von (4.15) und (4.16) ergibt sich
k−1∑i=1
si∑j=1
(λk − λi)αijvij = 0.
Nach Induktionsvoraussetzung sind die Vektoren vij linear unabhangig alsoαij = 0 fur alle i = 1, ..., k − 1, da λk 6= λi fur alle i = 1, ..., k − 1. Aber diesbedeutet aufgrund von Gleichung (4.14), dass v = 0.Der Beweis fur Matrizen geht wieder vollig analog. 2
167

Lemma 9.10. Sei V ein n-dimensionaler K-Vektorraum, ϕ ∈ EndK(V ) undA ∈M(n× n,K). Sei λ ein Eigenwert von ϕ bzw. A und s die geometrischeVielfachheit sowie r die algebraische Vielfachheit von λ. Dann gilt
1 ≤ s ≤ r.
Beweis: Sei λ∗ ein Eigenwert von ϕ. Damit existiert mindestens ein Eigen-vektor zu λ∗ und somit gilt 1 ≤ s. Sei v1, ..., vs eine Basis von Eig(ϕ, λ∗).Nun erganzen wir diese Basis zu einer Basis U = v1, ..., vs, ..., vn in V . Danngilt
M := MUU (ϕ) =
(B C0 D
),
wobei B = diagλ∗, ..., λ∗ ∈M(s× s,K). Dann erhalten wir, dass
det(M − λI) = det(B − λI) det(D − λI)
= det(diagλ∗ − λ, ..., λ∗ − λ) det(D − λI)
= (λ∗ − λ)s · q(λ),
wobei q ein Polynom ist. Somit gilt s ≤ r. Der Beweis fur Matrizen A istauch hier wieder vollig analog. 2
Beweis: (von Satz 9.7) Wir beweisen den Satz fur Endomorphismen. FurMatrizen ist er wegen Lemma 9.3 analog.(i)→ (ii) Sei ϕ diagonalisierbar. Dann gibt es eine Basis B aus Eigenvekto-ren. Damit ist die Matrix MB
B (ϕ) eine Diagonalmatrix D = diag d1, ..., dn,wobei d1, ..., dn die zu den Basisvektoren gehorigen Eigenwerte (nicht not-wendiger Weise verschieden) sind. Somit gilt
pϕ(λ) = (d1 − λ)...(dn − λ),
d.h. pϕ(λ) zerfallt in Linearfaktoren. Seien λ1, λ2, ..., λk die paarweise ver-schiedenen Eigenwerte von ϕ, si ihre geometrischen und ri ihre algebraischenVielfachheiten. Dann gilt
k∑i=1
si = n,
weil die Eigenvektoren eine Basis des n-dimensionalen Raumes V bilden.Zudem gilt
k∑i=1
ri = n,
weil das charakteristische Polynom den Grad n besitzt. Wegen Lemma 9.10wissen wir noch, dass si ≤ ri fur alle i = 1, ..., k Dies kann aber nur der Fall
168

sein, wenn si = ri fur alle i = 1, ..., k.(ii) → (iii) Seien λ1, λ2, ..., λk die paarweise verschiedenen Eigenwerte vonϕ, si ihre geometrischen und ri ihre algebraischen Vielfachheiten. Sei W :=Eig(ϕ, λ1) + ...+ Eig(ϕ, λk). Nach Lemma 9.9 gilt
W = Eig(ϕ, λ1)⊕ ...⊕ Eig(ϕ, λk).
Dapϕ(λ) = ±(λ− λ1)r1(λ− λ2)r2 ...(λ− λk)rk ,
so gilt r1 + ... + rk = n. Da ri = si fur alle i = 1, ..., k, so gilt dimKW =s1 + ...+ sk = n, d.h.
V = W = Eig(ϕ, λ1)⊕ ...⊕ Eig(ϕ, λk).
(iii)→ (i) DaV = Eig(ϕ, λ1)⊕ ...⊕ Eig(ϕ, λk),
so existiert eine Basis von V aus Eigenvektoren, d.h. ϕ ist diagonalisierbar.2
Bemerkung: Mit dem Satz 9.7 wissen wir nun, dass ein Endomorphis-mus/eine Matrix genau dann diagonalisierbar ist, wenn sein/ihr charakte-risches Polynom in Linearfaktoren zerfallt und fur alle Eigenwerte die alge-braische Vielfachheit gleich der geometrischen Vielfachheit ist.
An dieser Stelle wollen wir den Fundamentalsatz der Algebra erwahnen, ausdem folgt, dass jedes Polynom mit Koeffizienten aus C in Linearfaktorenzerfallt.
Satz 9.11. (Fundamentalsatz der Algebra) Sei p(x) ein Polynom mit Koef-fizienten in C und deg(p) > 0. Dann hat p(x) mindestens eine Nullstelle x∗in C.
Obwohl dieser Satz einen algebraischen Zusammenhang beschreibt, so benotigtman fur den Beweis ein paar analytische Hilfsmittel. Daher ist der Beweisnicht Gegenstand dieser Vorlesung. Ein sehr eleganter Beweis gelingt mitholomorphen Funktionen, die Gegenstand der Vorlesungen zur Funktionen-theorie sind. Es gibt allerdings eine Vielzahl von Beweisen. Man findet diesei.a. in Lehrbuchern zur Funktionentheorie. Eine Kurzubersicht uber unter-schiedlichen Beweiskonzepte findet man auch in Wikipedia.
Bemerkung: Sei p(x) ein Polynom mit Koeffizienten in C und deg(p) > 0.Dann zerfallt p in Linearfaktoren, d.h.
p(x) = (x− x1)...(x− xn)
169

mit xi ∈ C fur alle i = 1, ..., n.
Beweis: Nach dem Fundamentalsatz der Algebra besitzt p eine Nullstellex1 ∈ C. Mittels Polynomdivision findet man dann ein Polynom q(x) mitKoeffizienten aus C, so dass
p(x) = (x− x1)q(x).
und deg q = deg p − 1. Nun kann man die Uberlegung fur p auch fur qwiederholen usw. und erhalt nach n := deg p Schritten die Behauptung. 2
Nun ist aber der Nachweis der Diagonalisierbarkeit immer noch muhevoll,wenn das charakteristische Polynom im n-dimensionalen K-Vektorraum we-niger als n verschiedene Nullstellen besitzt, da man dazu die geometrischeVielfachheit eines jeden Eigenwertes bestimmen muss. Aus diesem Grund istdas folgende hinreichende Kriterium fur euklidische und unitare Vektorraumehilfreich. Um es formulieren zu konnen, brauchen wir zunachst noch eine De-finition.
Definition 9.12. Sei V ein endlich-dimensionaler euklidischer oder unitarerVektorraum und 〈·, ·〉 das Skalarprodukt von V . Sei ϕ ein Endomorphismusauf V . Dann heißt ϕ selbstadjungiert, falls
〈ϕ(v), w〉 = 〈v, ϕ(w)〉 ∀v, w ∈ V.
Satz 9.13. Sei V ein endlich-dimensionaler euklidischer oder unitarer Vek-torraum.
(i) Sei ϕ ein selbstadjungierter Endomorphismus auf V . Dann ist ϕ diago-nalisierbar. Es existiert sogar eine Orthonormalbasis aus Eigenvektorenvon ϕ.
(ii) Sei A eine symmetrische Matrix (im Fall K = R) bzw. eine hermitescheMatrix (im Fall K = C). Dann ist A diagonalisierbar. Es gibt dannsogar eine orthogonale Matrix T (im Fall K = R) bzw. eine unitareMatrix T (im Fall K = C), so dass
A = TDT−1
mit einer Diagonalmatrix D.
In beiden Fallen sind die Nullstellen des charakteristischen Polynoms stetsreell. Man sagt auch kurz, dass die Eigenwerte stets reell sind. Letzterer Satzist aber im Fall K = R trivial, da alle Eigenwerte fur K = R schon perDefinition reell sind.
170

Bemerkung: Korrektur zum Begriff einer orthogonalen Matrix: Eine MatrixT heißt orthogonal, wenn T−1 = T> (Fall K = R). Falls K = C und T−1 =T>, dann heißt die Matrix T unitar.
Beweis:
(ii) Da R ⊂ C, so ist pA fur K = R und K = C ein Polynom mit Koeffi-zienten in C. Nach dem Fundamentalsatz der Algebra zerfallt pA(λ) in(komplexe) Linearfaktoren, d.h.
pϕ(λ) = ±(λ− λ1)...(λ− λn).
Sei i ∈ 1, ..., n beliebig. Dann existiert ein Eigenvektor xi ∈ Cn, sodass Axi = λixi. Damit haben wir
xHi Axi = λixHi xi.
Daraus folgt nun
(xHi Axi)H = λi(x
Hi xi)
H .
Da A symmetrisch (im Fall K = R) bzw. hermitesch (im Fall K = C)ist, so gilt stets AH = A und somit
xHi Axi = xHi AHxi = λix
Hi xi,
d.h.
λixHi xi = xHi Axi = λix
Hi xi.
Da xi 6= 0, so gilt xHi xi > 0 und daher λi = λi, d.h. λi ∈ R. Damit sindalle λi sowohl im Fall K = R als auch im Fall K = C Eigenwerte von A.Nun zeigen wir per Induktion uber n, dass es eine orthogonale/unitareMatrix T mit T−1AT = D gibt, wobei D eine Diagonalmatrix ist.
IA: Fur n = 1 ist die Aussage trivial.
IS: Wir nehmen an, dass es fur alle Matrizen B ∈M((n−1)×(n−1), K)eine orthogonale/unitare Matrix Tn−1 gibt, so dass T−1
n−1BTn−1 =: Dn−1
eine Diagonalmatrix ist.
Sei vn ∈ Kn ein normierter Eigenvektor von A zum Eigenwert λn ∈ R.Wir erganzen vn nun zu einer Orthonormalbasis u1, ..., un−1, vn vonKn und bilden die Matrix
S := (u1|u2|...|un−1|vn).
171

Da fur alle i = 1, ..., n− 1:
uHi Avn = uHi (λnvn) = λnuHi vn = 0
und wegen AH = A dann auch
vHn Aui = (uHi Avn)H = 0,
so gilt
SHAS =
(B 00 λn
)mitB ∈M((n−1)×(n−1), K). Nach Induktionsvoraussetzung erhaltenwir fur
T := S
(Tn−1 0
0 1
),
dass
THAT =
(THn−1 0
0 1
)SHAS
(Tn−1 0
0 1
)=
(THn−1 0
0 1
)(B 00 λn
)(Tn−1 0
0 1
)=
(Dn−1 0
0 λn
).
Es bleibt zu zeigen, dass T hermitesch ist:
TH =
(THn−1 0
0 1
)SH =
(T−1n−1 00 1
)S−1 = T−1.
(i) Sei U = u1, ..., un eine Orthonormalbasis von V und A := MUU (ϕ) die
Darstellungsmatrix von ϕ. Da pϕ(λ) = pA(λ), so sind die Eigenwertevon ϕ gleich den Eigenwerten von A. Da ϕ selbstadjungiert ist, so ist Asymmetrisch (im Fall K = R) bzw. hermitesch (im Fall K = C), dennfur alle i, j ∈ 1, ..., n gilt
aij =n∑k=1
akj〈uk, ui〉 = 〈n∑k=1
akjuk, ui〉 = 〈ϕ(uj), ui〉
= 〈uj, ϕ(ui)〉 = 〈uj,n∑k=1
akiuk〉 =n∑k=1
aki〈uj, uk〉 = aji.
Wegen (ii) wissen wir nun, dass die Nullstellen von pϕ(λ) = pA(λ)reell sind und dass eine orthogonale/unitare Matrix T existiert, so dass
172

T−1AT =: D eine Diagonalmatrix ist. Somit haben wir AT = TD undfur die Eintrage tij von T erhalten wir
n∑k=1
aiktkj = djjtij.
Somit gilt fur vj :=∑n
k=1 tkjuk, dass
ϕ(vj) =n∑k=1
tkjϕ(uk) =n∑k=1
tkj
n∑i=1
aikui
=n∑i=1
n∑k=1
aiktkjui =n∑i=1
djjtijui = djjvj,
d.h. die Vektoren vj sind Eigenvektoren von ϕ. Zudem ist v1, ..., vneine Orthonormalbasis von V , denn
〈vi, vj〉 = 〈n∑l=1
tliul,n∑k=1
tkjuk〉 =n∑l=1
tli
n∑k=1
tkj〈ul, uk〉
=n∑l=1
tlitlj = δij.
Die letzte Gleichung gilt, da T orthogonal (K = R) bzw. unitar (K =C) ist.
2
Korollar 9.14. Sei V ein endlich dimensionaler euklidischer oder unitarerK-Vektorraum, ϕ ∈ EndK(V ) selbstadjungiert bzw. A ∈ M(n × n,K) sym-metrisch/hermitesch (falls K = R /K = C). Seien λ1,...,λk die Eigenwertevon ϕ bzw. A. Dann gilt
V = Eig(ϕ, λ1) f⊥ ... f⊥ Eig(ϕ, λk)
bzw.Kn = Eig(A, λ1) f⊥ ... f⊥ Eig(A, λk).
Lemma 9.15. Sei V ein endlich-dimensionaler euklidischer oder unitarerVektorraum und ϕ ein Endomorphismus auf V . Sei U eine Orthonormalbasisvon V . Dann ist ϕ genau dann selbstadjungiert, falls die DarstellungsmatrixMU
U (ϕ) symmetrisch (im Fall K = R) bzw. hermitesch (im Fall K = C) ist.
173

Beweis: Die eine Richtung wurde schon beim Beweis von Satz 9.13 (i) ge-zeigt. Sei MU
U (ϕ) symmetrisch (im Fall K = R) bzw. hermitesch (im FallK = C). Dann gilt fur alle i, j ∈ 1, ..., n:
〈ϕ(uj), ui〉 = 〈n∑k=1
akjuk, ui〉 =n∑k=1
akj〈uk, ui〉 = aij
= aji =n∑k=1
aki〈uj, uk〉 = 〈uj,n∑k=1
akiuk〉 = 〈uj, ϕ(ui)〉.
Seien nun v =∑n
j=1 cjuj und w =∑n
i=1 diui zwei beliebige Vektoren von V .Dann erhalten wir
〈ϕ(v), w〉 = 〈n∑j=1
cjϕ(uj),n∑i=1
diui〉 =n∑j=1
cj
n∑i=1
di〈ϕ(uj), ui〉
=n∑j=1
cj
n∑i=1
di〈uj, ϕ(ui)〉 = 〈n∑j=1
cjuj,n∑i=1
diϕ(ui)〉 = 〈v, ϕ(w)〉.
2
Lemma 9.16. Sei V ein n-dimensionaler K-Vektorraum, ϕ ∈ EndK(V )bzw. A ∈M(n× n,K). Wenn das charakteristische Polynom n verschiedeneNullstellen besitzt, dann ist ϕ bzw. A diagonalisierbar.
Beweis: Sei p das charakteristische Polynom. Nach Voraussetzung besitztes n verschiedene Nullstellen. Somit zerfallt das Polynom in genau n ver-schiedene Linearfaktoren, da deg(p) = n. Somit gilt fur die algebraischeVielfachheit ri fur jeden Eigenwert λi, dass ri = 1. Damit gilt auch fur diegeometrische Vielfachheit si = dimK Eig(p, λi) = 1 fur jeden Eigenwert λi,da 1 ≤ dimK Eig(p, λi) ≤ ri = 1 wegen Lemma 9.10. 2
9.2 Die Singularwertzerlegung
Definition 9.17. Sei A ∈ M(m × n,R). Dann heißt eine Darstellung vonA der Form
A = UΣV >
Singularwertzerlegung von A, falls U ∈M(m×m,R) und V ∈M(n× n,R)orthogonal sind und Σ = (sij) ∈M(m×n,R) mit sij = 0 fur alle i 6= j sowiesii ≥ 0 fur alle i. Die Werte σi := sii heißen die Singularwerte von A.
Satz 9.18. Sei A ∈M(m×n,R). Dann existiert eine Singularwertzerlegungvon A.
174

Beweis: Der Beweis erfolgt konstruktiv. Wir betrachten dazu die MatrixB := A>A. Diese ist symmetrisch, da
B> = (A>A)> = A>(A>)> = A>A = B.
Damit besitzt B aufgrund von Lemma 9.13 n reelle Eigenwerte
λ1 ≥ λ2 ≥ ... ≥ λn.
Seien v1, v2, ..., vn orthormale Eigenvektoren von B, wobei vi ein Eigenvektorzum Eigenwert λi (i = 1, ..., n). Dann gilt
λi‖vi‖2 = v>i λivi = v>i Bvi
= v>i A>Avi = ‖Avi‖2 ≥ 0
und somit λi ≥ 0. Sei nun
λ1 ≥ ...λr > λr+1 = ... = λn = 0.
Nun bilden wir Matrizen U und V wie folgt:
U := (u1, ..., um), V := (v1, ..., vn),
wobei
ui :=1√λiAvi, fur i = 1, ..., r.
Dann sind die Vektoren u1, ..., ur orthonormal, denn fur i, j = 1, ..., r gilt
〈ui, uj〉 = 〈 1√λiAvi,
1√λjAvj〉 =
1√λiλj〈Avi, Avj〉
=1√λiλj
v>i A>Avj =
1√λiλj
v>i Bvj =1√λiλj
v>i λjvj =λj√λiλj〈vi, vj〉
=
λiλi
= 1, falls i = j
0 sonst.
Schließlich erganzen wir u1, ..., ur zu einer Orthonormalbasis u1, ..., ur, ..., umvon Rm. Sei schließlich Σ := (sij) ∈M(m× n,R) mit
sij =
σi :=
√λi, falls i = j
0 sonst.
175

Dann erhalten wir (bei Berucksichtigung von Avi = 0 fur i = r + 1, ..., n, dadiese vi Eigenvektoren zum Eigenwert Null sind)
UΣV > =r∑i=1
uisiiv>i =
r∑i=1
√λiuiv
>i =
r∑i=1
Aviv>i
=n∑i=1
Aviv>i = AV V > = A.
2
Bemerkung 9.19. Sei A = UΣV > eine Singularwertzerlegung von A.
1. Die Anzahl von Null verschiedener Singularwerte von A ist gleich demRang r von A.
2. Die Singularwerte von A sind eindeutig bestimmt.
3. Falls ui und vi die Spalten von U und V sind, dann gilt
A =r∑
k=1
σkukv>k .
4. Es gilt im A = span u1, ..., ur und kerA = span vr+1, ..., vn.
Die Singularwertzerlegung liefert eine einfache Methode zur Datenkompres-sion. Wie der folgende Satz zeigt, kann man zur Reduzierung der Datenin der Summendarstellung der Singularwertzerlegung bei einem Index k ab-schneiden und erhalt dabei eine Matrix, die in der Frobeniusnorm bei kleinenSingularwerten σk+1, ..., σr nur geringfugog von A abweicht.
Satz 9.20. Sei A = UΣV > =∑r
i=1 σ`u`v>` eine Sigularwertzerlegung einer
Matrix A ∈M(m× n,R) mit
σ1 ≥ σ2 ≥ ... ≥ σr.
Dann gilt fur
Ak :=k∑`=1
σ`u`v>` , 1 ≤ k < r,
dass‖A− Ak‖F = σk+1 + ...+ σr.
176

Dabei ist
‖B‖F =
√√√√ m∑i=1
n∑j=1
b2ij
die Frobeniusnorm fur eine beliebige Matrix B = (bij) ∈M(m× n,R).
Beweis: Nach Definition von Ak gilt
A− Ak =r∑`=1
σ`u`v>` −
k∑`=1
σ`u`v>` =
r∑`=k+1
σ`u`v>`
Seien
u` =
u1`
...um`
, v` =
v1`
...vn`
.
Dann erhalten wir
‖A− Ak‖2F =
m∑i=1
n∑j=1
(r∑
`=k+1
σ`ui`vj`
)
=m∑i=1
n∑j=1
r∑`=k+1
σ2`u
2i`v
2j` +
m∑i=1
n∑j=1
r∑`1 6=`2=k+1
σ`1ui`1vj`1σ`2ui`2vj`2
=r∑
`=k+1
σ2`
m∑i=1
u2i`︸ ︷︷ ︸
=1
n∑j=1
v2j`︸ ︷︷ ︸
=1
+r∑
`1 6=`2=k+1
σ`1σ`2
m∑i=1
ui`1ui`2︸ ︷︷ ︸=0
n∑j=1
vj`1vj`2︸ ︷︷ ︸=0
=r∑
`=k+1
σ2`
2
Als Beispiel zur Datenkompression betrachten wir die Kompression von Bild-daten. Dazu nehmen wir anlasslich des Endspiels der Fußball-EM ein Bildmit dem Eiffelturm in den Farben Frankreichs und Portugals.
177

Originalbild mit 640x426 Pixeln
Die Farbdarstellung erfolgt uber die drei Grundfarben rot, grun und blau. Inden folgenden Bildern sind die jeweiligen Rot-, Grun- und Blau-Anteile zusehen.
Diese Anteile werden fur jeden Pixel in Form einer Zahl zwischen 0 und255 gespeichert. Wenn wir jeden Pixelwert (jeweils fur rot, grun und blau)in eine Matrix A mit 426 Zeilen und 640 Spalten schreiben und eine Sin-gularwertzerlegung vornehmen, dann erhalten wir die im folgenden Bild dar-gestellten Singularwerte.
Offenbar gibt es nur wenige sehr große Eigenwerte und viele Eigenwerte naheNull. Schneiden wir die Singularwertzerlegung bei k = 10, 30, 100 und 200ab, so erhalten wir folgende Bilder:
178

k=10 k=30
k=100 k=200
Bereits bei k = 10 kann man das Bild schemenhaft erkennen. Ab k = 100gibt es nur noch geringe Abweichungen vom Originalbild und ab k = 200sieht man faktisch keinen Unterschied zum Originalbild mehr.
Ubrigens gibt es in python Module, mit denen man die Bildkompressionmittels Singularwertzerlegung einfach realisieren kann. Unten stehend ist derCode angegeben, wenn man bei k = 30 abschneidet.
from numpy . l i n a l g import svdfrom numpy import asarray , uint8 , diag , dotfrom PIL import Image
imdata = asarray ( Image . open ( ’ e i f f e l t u rm . jpg ’ ) )imdata . f l a g s . w r i t e ab l e = True
f o r i in xrange (2 ) : # red ( i =0) , green ( i =1) , b lue ( i =2)U, s , V = svd ( imdata [ : , : , i ] , f u l l m a t r i c e s=False )k=30 # cut SVD sum at index kS = diag ( s [ : k ] )imC = dot (U [ : , : k ] , dot (S , V [ : k , : ] ) ) # imC = U S Vimdata [ : , : , i ]=imC
im = Image . fromarray ( u int8 ( imdata ) ) # unsigned i n t (0−255)im . save ( ’ e i f f e l t u rm sma l l . jpg ’ )
179

9.3 Trigonalisierung
Definition 9.21. Ein Endomorhismus ϕ heißt trigonalisierbar, falls eseine Kette von Unterraumen V0, V1, ..., Vn von V gibt, so dass
0 = V0 ( V1 ( V2 ( ... ( Vn = V
mit ϕ(Vi) ⊆ Vi fur alle i = 0, 1, ..., n. Eine solche Kette von Unterraumennennt man auch ϕ-invariante Fahne von V .
Definition 9.22. Eine Matrix A ∈ M(n × n,K) heißt trigonalisierbar,falls es eine regulare Matrix S ∈M(n×n,K) gibt, so dass SAS−1 eine obereDreiecksmatrix ist.
Lemma 9.23. Ein Endomorhismus ϕ ist genau dann trigonalisierbar,falls es eine Basis B von V gibt, so dass MB
B (ϕ) eine obere Dreiecksmatrixist.
Beweis:
(→) Da ϕ trigonalisierbar ist, so existiert eine Kette von Unterraumen V0,V1, ..., Vn von V mit
0 = V0 ( V1 ( V2 ( ... ( Vn = V
mit ϕ(Vj) ⊆ Vj fur alle j = 0, 1, ..., n. Daher finden wir eine BasisB = v1, ..., vn von V , so dass
Vj = spanv1, v2, ..., vj ∀j = 1, ..., n.
Da ϕ(Vj) ⊆ Vj, so gilt
ϕ(vj) ∈ Vj = spanv1, v2, ..., vj ∀j = 1, ..., n.
Somit lasst sich ϕ(vj) fur als eine Linearkombination der ersten j Basis-vektoren v1,...,vj darstellen. Dies bedeutet fur die DarstellungsmatrixA = (aij) := MB
B (ϕ), dass
aij = 0 ∀i = j + 1, ..., n,
d.h. A ist eine obere Dreiecksmatrix.
(←) Da MBB (ϕ) eine obere Dreiecksmatrix ist, so ist ϕ(vj) fur alle j = 1, ..., n
eine Linearkombination der ersten j Basisvektoren v1,...,vj. Damit giltfur die Vektorraume
Vj := spanv1, v2, ..., vj,
180

dass ϕ(vj) ∈ Vj fur alle j = 1, ..., n. Zudem gilt
0 = V0 ( V1 ( V2 ( ... ( Vn = V
und somit auch ϕ(vk) ∈ Vk ⊂ Vj fur alle k = 1, ..., j. Da Vj =spanv1, v2, ..., vj, so haben wir nun ϕ(Vj) ⊆ Vj fur alle j = 1, ..., n,d.h. ϕ ist trigonalisierbar.
2
Korollar 9.24. Sei ϕ ein Endomorphismus eines endlich-dimensionalen Vek-torraums V und B eine beliebige Basis von V . Dann ist ϕ genau dann tri-gonalisierbar, falls MB
B (ϕ) trigonalisierbar ist.
Beweis: Nach Lemma 9.23 ist ϕ genau dann trigonalisierbar, wenn es eineBasis B gibt, so dass M B
B(ϕ) eine obere Dreiecksmatrix ist.
(→) Sei B eine Basis von V , so dass M BB
(ϕ) eine obere Dreiecksmatrix ist.
Sei zudem n die Dimension von V und A := (aij) := MBB (ϕ) die Dar-
stellungsmatrix von ϕ bezuglich der Basis B. Sei weiter C := (cij) :=MB
B(id) die Darstellungsmatrix der identischen Abbildung beim Wech-
sel von der Basis B = b1, ..., bn zur Basis B = b1, ..., bn undD := (dij) := C−1. Dann gilt per Definition der Matrizen, dass
ϕ(bj) =n∑i=1
aijbi ∀j = 1, ..., n
bk =n∑j=1
cjkbj ∀k = 1, ..., n
bi =n∑`=1
d`ib` ∀i = 1, ..., n.
Somit erhalten wir fur alle k = 1, ..., n:
ϕ(bk) = ϕ(n∑j=1
cjkbj) =n∑j=1
cjkϕ(bj) =n∑j=1
cjk
n∑i=1
aijbi
=n∑j=1
cjk
n∑i=1
aij
n∑`=1
d`ib` =n∑`=1
n∑i=1
n∑j=1
d`iaijcjkb`,
d.h.
M BB
(ϕ) = DAC = C−1MBB (ϕ)C.
Da M BB
(ϕ) eine obere Dreiecksmatrix ist, so bedeutet dies gerade, dass
MBB (ϕ) trigonalisierbar ist.
181

(←) Da MBB (ϕ) trigonalisierbar ist, so existiert eine regulare Matrix C =
(cij), so dassC−1MB
B (ϕ)C
eine obere Dreiecksmatrix ist. Sei B = b1, ..., bn. Dann wahlen wir
B := b1, ..., bn mit bj :=n∑i=1
cijbi
Da C regular ist, so ist B auch eine Basis und C = MBB
(id). Wie zuvorgilt nun
M BB
(ϕ) = C−1MBB (ϕ)C,
d.h. M BB
(ϕ) ist eine obere Dreieckmatrix. Somit ist ϕ wegen Lemma9.23 trigonalisierbar.
2
Satz 9.25. (Trigonalisierungssatz)
(i) Sei ϕ ein Endomorphismus eines endlich-dimensionalen VektorraumsV . Dann ist ϕ genau dann trigonalisierbar, falls das charakteristischePolynom pϕ(λ) in Linearfaktoren zerfallt.
(ii) Eine Matrix A ist genau dann trigonalisierbar, wenn das charakteristi-sche Polynom pA(λ) in Linearfaktoren zerfallt.
Beweis: Da pϕ(λ) = pA(λ) fur A := MBB (ϕ), so genugt es wegen Lemma
9.23 die Aussage (ii) fur Matrizen zu zeigen.
(→) Sei A trigonalisierbar. Dann existiert eine regulare Matrix S, so dassSAS−1 eine obere Dreiecksmatrix ist. Nun gilt
pA(λ) = det(A− λI) = det(SAS−1 − λI) = ±(λ− λ1) · ... · (λ− λn),
wobei λ1,...,λn die Elemente von SAS−1 auf der Hauptdiagonalen sind.
(←) Seipϕ(λ) = pA(λ) = (λ− λ1) · ... · (λ− λn),
mit λ1,...,λn ∈ K. Wir konstruieren schrittweise eine Matrix S, so dassSAS−1 eine obere Dreiecksmatrix ist. Sei B1 = e1, ..., en die Stan-dardbasis. Sei A1 := A und v1 ein Eigenvektor zu λ1. Dann exis-tiert nach dem Austauschlemma ein j1 ∈ 1, ..., n, so dass B2 =
182

v1, e1, ..., ej1−1, ej1+1, ..., en eine Basis ist. Dann gilt fur die Ubergangs-matrix Q1 von der Basis B1 zur Basis B2 und den Endomorphismusϕ(v) := Av, dass
A2 := MB2B2
(ϕ) = Q−11 MB1
B1(ϕ)Q1 = Q−1
1 A1Q1.
Da ϕ(v1) = Av1 = λ1v1, so gilt fur die erste Spalte s1 von MB2B2
(ϕ),dass
s1 =
λ1
0...0
.
Somit haben wir
Q−11 A1Q1 = A2 =
λ1 ∗ ... ∗0
A2...0
.
Wir betrachten nun A2. Da A1 und A2 ahnlich sind, so stimmen dieEigenwerte von A1 und A2 uberein. Somit ist λ2 ein Eigenwert von A2.Sei v2 ein Eigenvektor von A2 zu λ2. Dann existiert nach dem gleichenPrinzip wie zuvor eine regulare Matrix Q2, so dass
Q−12 A2Q2 =
λ2 ∗ ... ∗0
A3...0
.
Dann gilt fur
Q2 :=
(1 0
0 Q2
),
183

dass
A3 := Q−12 A2Q2 =
(1 0
0 Q−12
)λ1 ∗ ... ∗0
A2...0
(
1 0
0 Q2
)
=
λ1 ∗ ... ∗0
Q−12 A2Q2
...0
=
λ1 ∗ ∗ ... ∗0 λ2 ∗ ... ∗0 0
A3...
...0 0
.
Offenbar ist A3 ahnlich zu A2 und somit auch zu A1 = A. Somit stim-men die Eigenwerte von A3 und A uberein und man kann den Prozessanalog mit λ3 fortsetzen. Sukzessive erhalten wir also regulare MatrizenQ1, ..., Qn−1, so dass
Ai+1 = Q−1i AiQi ∀ i = 1, ..., n− 1
und An eine obere Dreiecksmatrix ist. Auf diese Weise haben wir
An = Q−1n−1...Q
−12 Q−1
1 A1Q1Q2...Qn−1.
Somit gilt fur S := Q−1n−1...Q
−12 Q−1
1 , dass SAS−1 eine obere Dreiecks-matrix ist.
2
Korollar 9.26. Eine Matrix A ∈M(n× n,C) ist stets trigonalisierbar.
Beweis: Dies folgt unmittelbar aus Satz 9.25 und dem Fundamentalsatz derAlgebra. 2
9.4 Die Jordansche Normalform
In diesem Abschnitt beschaftigen wir uns mit einem der zentralen Satze derlinearen Algebra, namlich die Klassifikation von ahnlichen Matrizen. Dazubenotigen wir zunachst ein paar Eigenschaften von Polynomen.
Definition 9.27. Ein Polynom p = a0 + a1x + a2x2... + anx
n ∈ K[x] vomGrad n heißt normiert, falls der Koeffizient an von p (d.h. der Koeffizientvor xn) gleich 1 ist.
184

Definition 9.28. Sei A ∈ M(n × n,K). Dann heißt mA das Minimalpo-lynom von A, falls mA(A) = 0 und mA(x) ∈ K[x] das kleinste normiertePolynom mit dieser Eigenschaft ist.
Nach dem Satz von Cayley/Hamilton wissen wir, dass jede Matrix ein Mini-malpolynom besitzt und deg(mA) ≤ deg(pA).
Definition 9.29. Eine Matrix A ∈ M(n × n,K) heißt Matrix in Jordan-Normalform, falls
A = diagJ(λ1, n1), ..., J(λk, nk)
=
J(λ1, n1) 0 ... 0
0 J(λ2, n2) ... 0... 0
. . ....
0 0 ... J(λk, nk)
,
wobei J(λi, ni) fur alle i = 1, ..., k sogenannte Jordankastchen zum Eigenwertλi der Lange ni sind, d.h.
J(λi, ni) =
λi 1
. . .. . .. . . 1
λi
∈M(ni × ni, K)
Hinweis: Die λi mussen nicht paarweise verschieden sein.
Beispiel:
J =
1 10 1
2
0
2 10 2
1
5
5 1 00 5 10 0 5
185

Satz 9.30. (Klassifikation ahnlicher Matrizen)
(i) Sei A ∈M(n× n,K). Dann ist A genau dann ahnlich zu einer Matrixin Jordan’scher Normalform, wenn das Minimalpolynom mA in Line-arfaktoren zerfallt. Dabei sind die Nullstellen des Minimalpolynoms dieEintrage auf der Hauptdiagonalen der Jordan-Normalform.
(ii) Wenn A ahnlich zu einer Matrix in Jordan-Normalform ist, dann giltfur die Anzahl sij der Jordankastchen J(λi, j) zum gleichen Eigenwertλi von A mit der Dimension j, dass
sij = 2 dimK(kerBji )− dimK(kerBj−1
i )− dimK(kerBj+1i ),
wobei Bi := A− λiI.
Korollar 9.31. Jedes A ∈ M(n × n,C) ist ahnlich zu einer Matrix in Jor-dan’scher Normalform.
Beweis: Da jedes Polynom in C in Linearfaktoren zerfallt, ist die Aussagewegen Satz 9.30 sofort klar. 2
Anstelle eines Beweises von Satz 9.30 demonstrieren wir die Konstruktioneiner Ahnlichkeitstransformation auf Jordan-Normalform an einem Beispiel.Sei
A =
0 1 1 0−4 4 2 00 0 2 01 0 1 3
Zunachst bestimmen wir die Eigenwerte und Eigenraume von A. Es gilt mitHilfe des Entwicklungssatzes von Laplace, dass
det(A− λI) = det
−λ 1 1 0−4 4− λ 2 00 0 2− λ 01 0 1 3− λ
= (3− λ) det
−λ 1 1−4 4− λ 20 0 2− λ
= (3− λ)(2− λ) det
(−λ 1−4 4− λ
)= (3− λ)(2− λ)(4− 4λ+ λ2) = (3− λ)(2− λ)3.
186

Dann erhalten wir
Eig(A, 3) = ker(A− 3λ) = ker
−3 1 1 0−4 1 2 00 0 −1 01 0 1 0
= span(
0001
)
und
Eig(A, 2) = ker(A− 2λ) = ker
−2 1 1 0−4 2 2 00 0 0 01 0 1 1
= ker
0 1 3 20 0 0 00 0 0 01 0 1 1
= span( −1−310
),
( −1−201
)
Da die geometrische Vielfachheit 2 kleiner als die algebraische Vielfachheit3 fur λ = 2 ist, so spannen die Basisvektoren der Eigenraume nicht dengesamten Raum auf und die Matrix A ist nicht diagonalisierbar. Aber mitHilfe der verallgemeinerten Eigenraume konnen wir A in eine Matrix J inJordan-Normalform transformieren.
Definition 9.32. Sei A ∈ M(n × n,K) und λ ∈ K ein Eigenwert von A.Dann heißt
Hk(A, λ) = ker(A− λI)k
der verallgemeinerte Eigenraum der Stufe k zum Eigenwert λ.
Bemerkung:
1. Nach Definition ist klar, dass H1(A, λ) = Eig(A, λ).
2. Offenbar gilt auch
0 = H0(A, λ) ⊆ H1(A, λ) ⊆ ... ⊆ Hk(A, λ) ⊆ ...
3. Falls fur ein k gilt, dass Hk(A, λ) = Hk+1(A, λ), dann lasst sich leichtper Induktion zeigen, dass
0 = Hk(A, λ) = Hk+m(A, λ) fur alle m ≥ 0.
187

4. Somit gibt es genau ein k ≤ n, so dass
0 = H0(A, λ) ( H1(A, λ) ( ... ( Hk(A, λ) = Hk+1(A, λ) = ...
Den Raum Hk(A, λ) nennt man Hauptraum von A zum Eigenwert λ.
Wir setzen nun unser Beispiel fort und berechnen den Hauptraum von A zumEigenwert 2.
H2(A, 2) = ker(A− 2λ)2 = ker
0 0 0 00 0 0 00 0 0 01 0 1 1
= H1(A, 2) + span
(1100
) = span
( −1−310
),
( −1−201
),
(1100
).
Man pruft leicht nach, das H3(A, 2) = ker(A − 2λ)3 = H2(A, 2). Somit istH2(A, 2) der Hauptraum von A zum Eigenwert 2. Nun wahlen wir als erstenBasisvektor
x1 :=
(1100
)∈ H2(A, 2)\H1(A, 2)
und als zweiten Basisvektor
x2 := (A− 2I)x1 =
( −1−201
)Nun erganzen wir x1, x2 mit x3 :=
( −1−310
)zu einer Basis von H2(A, 2).
Schließlich erhalten wir mit x4 :=
(0001
)∈ H1(A, 3) eine Basis x1, x2, x3, x4
des gesamten Raumes R4. Nun schreiben wir alle Basisvektoren spaltenweisein eine Matrix, wobei wir den aus x1 konstruierten Vektor x2 vor x1 schreiben,d.h.
T := (x2|x1|x3|x4) =
−1 1 −1 0−2 1 −1 00 0 1 01 0 0 1
und erhalten
AT =
−2 1 −2 0−4 0 −6 00 0 2 02 1 0 3
= T
2 10 2
0 2 0
0 0 3
188

Da der Hauptraum von A zum Eigenwert 2 die Dimension 1 und die Stufe 2besitzt, so gibt es ein Jordankastchen der Dimension r−k+1 = 3−2+1 = 2,wobei r die algebraische Vielfachheit und k die Stufe des Hauptraums ist.Der erganzende Basisvektor x3 ∈ H2(A, 2) liefert noch ein Jordankastchender Dimension 1 zum Eigenwert 2. Schließlich fuhrt der Basisvektor x4 ∈H1(A, 3) = Eig(A, 3) zu einem Jordankastchen der Dimension 1 zum Eigen-wert 3.
Bemerkung:
1. Falls x1 ∈ ker(A− λI)2 und x2 := (A− λI)x1, dann gilt
(A− λI)x2 = 0, d.h. Ax2 = λx2
und(A− λI)x1 = x2, d.h. Ax1 = λx1 + x2.
Beide Gleichungen nebeneinander geschrieben ergeben:
A(x2|x1) = (λx2|λx1 + x2) = (x2|x1)
(λ 10 λ
).
2. Analog erhalt man fur x1 ∈ ker(A− λI)k und
x2 := (A− λI)x1
x3 := (A− λI)x2
...
xk := (A− λI)xk−1,
dass
A(xk|...|x2|x1) = (xk|...|x2|x1)
λ 1
λ 1. . .
. . .
λ 1λ
︸ ︷︷ ︸
k Spalten
.
Wenn x1 ∈ Hk(A, λ)\Hk−1(A, λ), dann sind die Vektoren x1,...,xk li-near unabhangig und gehoren alle zu Hk(A, λ).
3. Seien λ1, ..., λm die paarweise verschiedenen Eigenwerte einer MatrixA. Dann ist die Summe Hk1(A, λ1) + ...+Hkm(A, λm) der zugehorigenHauptraume direkt, d.h.
Hk1(A, λ1) + ...+Hkm(A, λm) = Hk1(A, λ1)⊕ ...⊕Hkm(A, λm).
189