linear seakeeping high sea state applicability · the small motion assumption of linear seakeeping...
TRANSCRIPT

Proceedings of the 16th International Ship Stability Workshop, 5-7 June 2017, Belgrade, Serbia 1
Linear Seakeeping High Sea State Applicability
Timothy C. Smith, Naval Surface Warfare Center Carderock Division, [email protected]
Kevin M. Silva, Naval Surface Warfare Center Carderock Division, [email protected]
ABSTRACT
The small motion assumption of linear seakeeping codes is well known. The validity of this assumption is investigated by comparisons with a body exact non-linear seakeeping code over a range of significant wave height. A metric based on relative motion is proposed to quantify the validity of the assumption and indicate up to what point linear seakeeping is appropriate.
Keywords: Linear Seakeeping; numerical simulations.
1. INTRODUCTION
Despite the advent of relatively computationally fast non-linear time domain seakeeping programs, there is still some use for linear strip-theory seakeeping programs. Frequency domain programs can produce seakeeping predictions for many speeds, relative wave headings, and seaways in seconds of computation. This is especially useful for including seakeeping in early design analysis of alternatives and calculating mission operability. Time histories based on linear response amplitude operators (RAOs) are also fast to compute and provide representative motions for ship system design/evaluation.
The main assumptions of linear strip-theory seakeeping codes are well known. The first is that calculations are preformed about the mean undisturbed waterline. Hydrostatics, radiation, diffraction, and incident wave forces are all calculated on the submerged portion of the hull at the mean undisturbed waterline. This is also stated as a “wall sided” and “small motion” assumptions. These descriptions explain in a physical sense what using the mean undisturbed waterline to define the submerged hull actually means. “Wall sided” indicates that the hydrostatic properties are not changing as the ship moves. “Small motion” indicates that the submerged geometry used for radiation, diffraction, and incident wave force calculations can be considered constant. O’Dea and Walden (1985) examined linear seakeeping with respect to bow flare and wave steepness.
The other main assumption of linear strip-theory seakeeping relates to the independence of the two dimensional strips. The strips are assumed to be independent but in actuality flow from one will influence flow from strips further aft. As a result low speed strip-theory is limited to Froude numbers less than 0.3-0.35. Higher speed strip-theories have been formulated. This paper does not address the validity of using low speed strip-theory above Froude numbers of 0.3-0.35.
Lastly, as a direct result of having a constant submerged volume, the equations of motion can be solved for a unit wave height and linearly scaled to higher wave heights. This is most obviously seen with heavily damped heave and pitch motion. However, roll has non-linear damping and most linear seakeeping programs have some iterative or computational scheme to account for this and do not scale roll linearly with wave height.
However, seakeeping predictions in very small waves, where linear seakeeping assumptions are valid, are not very useful. Fortunately, the assumptions can be stretched and produce useful results at wave heights of interest. This paper discusses a metric to identify when the linear seakeeping assumptions are more than stretched but broken.
2. COMPARISON APPROACH
The validity of linear scaling of results will be determined by comparing linear strip theory results with non-linear time domain results for the same hull form, loading condition, and seaways. Heave,

pitch, and rbe comparecomparisonmotion valumotion valuFor linear replotted agawill deviate
Motions(Fr=0.2062)seas in 30 complete mand providevaluation. from 3.25mfrom mid-SSTANAG 4correspondssecond moheights, soheight. Thshape is Bre
The hulnaval combpublic domStern, 2005and Table 1
Figure 1: Geo
Table 1: Full
Parameter
Length betwPerpendiculBeam
Draft, basel
Trim (+bow
Displaceme
LCG (aft FP
KG
GM
Roll Gyradi
Pitch Gyrad
Yaw Gyrad
Proceedings
roll root meaed for a ran
n will be maue at a givenue of the lowesponse, thatinst wave h
e from that lin
s will be ) for headindeg increm
matrix, it avoes enough h The wave
m to 12m inSea State 5 to4194 (NATOs to 0.5 to 1
odal period o the steepnhe waves areetschneider.
ll form usedbatant that hamain (DTMB5). See Figu
loading con
ometry of mod
scale principle
ween lars
line
w down)
ent
P)
ius
dius
dius
of the 16th Int
an square (RMnge of waveade as a ratn wave heighwest wave het ratio is a streight. Non-ne.
calculated ngs from heaments. Whiloids higher Fheadings fore heights con 1.75m inco mid-Sea SO 1983). Th1.84 times this used for
ness increase long-creste
d for this stuas been wideB model 541ure 1 for a vindition detail
del 5415
e dimensions o
Units
m
m
m
m
tonnes
m
m
m
m
m
m
ternational Ship
MS) values e heights. tio of the Rht over the Reight consideraight line w-linear respo
at 15 knad to followle this is noFroude numbr a preliminonsidered rarement. Thitate 8 followhe wave heighe draft. Ar all the wses with w
ed. The spe
udy is a genly studied in15) (Longo iew of geomls at full scal
of DTMB 5415.
142.0
18.87
6.51
0.00
9381.8
72.14
7.86
1.63
7.05
35.5
35.5
p Stability Wo
will The
RMS RMS ered. when onse
nots wing ot a bers nary ange is is wing ghts
A 14 wave wave ectra
neric n the
and metry
e.
.
8
smais “thehei
Nav200and(Litheuse(Saspe(Frdamusin(19dammaasscalcveldefpoi
loaSci(SAfreqdimpotcalcforcpotapparetuncominccommogramowav
3.
div
rkshop, 5-7 Ju
This hull foall amount o“wall sided”ory should bght than hull
The simulavy Ship M05; Meyers ad Large Amn et al., 199ory seakeepi
es the Salvalvensen et eed terms. rank, 1967) mping is esng Ikeda-T
958) empirimping is intch the calociated withculate the reocities, and a
fined points, ints on the hu
LAMP is ads simulatiience AppliAIC) beginnquency dom
mensional wtential flow culations inces and nontential flowpendage lift a
estimated ned coefficiembined sealudes rigid
mputing hydotions, velocavity and deotion betweenve.
COMPAR
The resulviding by th
ne 2017, Belgra
orm is a tradof flare forwa” the expectabe appropriatl forms with
ation tools uMotion Progr
and Batis, 19mplitude Mo90, 1994). Sing code firsvensen-Tuckal., 1970) wIt uses Fr
to calculate timated from
Tanaka-Himeical formul
ncluded by lculated resph the roll daesponse. SMaccelerationsas well as, r
ull and the in
time domainon code thications Int
ning in 1991main codes. wave-body happroach. Tnclude non--linear hydro
w calculatioand other vis
using empent models.akeeping an
and elastdrodynamic lities, and acefined pointn points on t
ISON RESU
lts are noe value asso
rade, Serbia
ditional monard. As mosation is thatte at a much more variati
used for thiram (SMP9985; Meyers otion PrograSMP95 is a st developed k-Faltinsen with modifirank’s close
e radiation fm appendageno (1978) lae. Nonan iterative
sponse withamping estim
MP95 calculas at center ofrelative mot
ncident wave
in ship motiohat was deternational 1 to compleLAMP calc
hydrodynamiThe basic hy-linear Frouostatics as wons. Rolscous and vopricial form LAMP cand maneuvtic beam loads. LAMccelerations
nts, as well the hull and
ULTS
on-dimensionociated with
2
nohull with ast of the hullt linear striphigher waveion.
is study are5) (Conrad,et al., 1981)
am (LAMP)linear strip-in 1981 thatstrip-theory
ed forward-e-fit methodforces. Rollge geometry
and Katon-linear roll
process toroll angle
mate used toates motions,f gravity andtion betweene.
on and waveeveloped by
Corporationement linearculates threeics using aydrodynamicude Krylov
well as linearl damping,ortical forces
mulae and/oran calculatevering, andmodels for
MP calculatesat center ofas relative
the incident
nalized byh the 3.25m
a l p e
e , ) ) -t y -d l y o l o e o , d n
e y n r e a c v r , s r e d r s f e t
y m

significant wave heightscale linearlthe same comparison(SMP95) se8, the roll dvery small i
LAMP hthe linear height ranghead (0 degseas above times draft)linear as vavery close in
Figure 2: Comat Fr=0.21 an
Figure 3: Comat Fr=0.21 an
Proceedings
wave height ranges fromly with waverange. F
n of non-lieakeeping pr
data are not pin head and f
heave and piseakeeping
ge. The diffg), bow (30de
non-dimens). Pitch behalues are sman dimension
mparison of nnd head seas (0
mparison of nnd bow seas (30
of the 16th Int
ht. The nm 1.0 to 3.69e height, theFigures 2 tinear (LAMredictions. Ipresented duefollowing sea
itch results aline over t
ferences are eg), and folloional wave hhavior in beall. LAMP
nal values as
non-linear and0 deg).
non-linear and0 deg).
ternational Ship
non-dimensio9. If the motiey should folto 8 show
MP) and linIn Figures 2e to values beas.
are very closhe entire wmost notabl
owing (180 dheight 2.5 (1eam seas is and SMP95well.
d linear seakee
d linear seakee
p Stability Wo
onal ions llow
the near and
eing
se to wave le at deg) 1.25 not
are
eping
eping
Figuat F
Figuat F
Figuat F
rkshop, 5-7 Ju
ure 4: CompaFr=0.21 and bo
ure 5: CompaFr=0.21 and be
ure 6: CompaFr=0.21 and qu
ne 2017, Belgra
rison of non-liow seas (60 deg
rison of non-lieam seas (90 de
rison of non-liuartering seas (
rade, Serbia
linear and lineg).
linear and lineeg).
linear and line(120 deg).
3
ear seakeeping
ear seakeeping
ear seakeeping
g
g
g

Figure 7: Comat Fr=0.21 an
Figure 8: Comat Fr=0.21 an
Both LAlinear behavnoticeable cSMP95 resslope than 1are almostdimensioanin roll damp
4. APPLI
Grigorotheory is aunder Fn=0perform as wvertical aboshape has sia relatively the waterlinoil tanker h
Proceedings
mparison of nnd quartering s
mparison of nnd following se
AMP and SMvior as expecurvature assults are fai1:1 with wavt twice thel values. Thping models
CABILITY
opoulos et appropriate f0.3. Howevwell as expeove the watignificant taplarge bilge
ne along mohas vertical s
of the 16th Int
non-linear andseas (150 deg).
non-linear andas (180 deg).
MP95 roll reected. LAM the wave hirly linear wve height. LAe SMP95 his is explainand appenda
Y METRIC
al. (2003) for displacemer, the RoPa
ected. Whileterline, the bper. DTMB with nearly
ost of the lensides for mo
ternational Ship
d linear seakee
d linear seakee
esults vary frMP results hheight increawith a diffeAMP roll resroll values
ned as differeage suite.
indicates sment monohax ferry did the geometrbelow watermodel 5415 vertical side
ngth. A typost of it’s len
p Stability Wo
eping
eping
from have ases. erent sults
in ence
strip hulls
not ry is rline has
es at pical ngth
andmeseaand
appthebilgporrelais statloc
themoD)
P =
resuseasubevadist
andrelaqualocaft avewhThigeocas
speshoFigrelathaSMaspoibec
LAtha
rkshop, 5-7 Ju
d depth. Htric that q
akeeping basd relative mo
An informapropriate if t
draft; essenge. The ratrtion of theative to wavesomewhat vtistic, e.g., ation.
Following Rayleigh di
otion, σ, excecan be found
2
2
2σD
e−
=
The probabults divereg
akeeping appbjective in tealuate relativtance, e.g., h
This study d 0.75LBP, ative motionarter length ations whilegeometry ch
erage of the ere the statiis definitioometries fromse, the critica
Also, note eed and headould be selegures 9 to 12ative motiont showed a
MP95. The fowave headin
int line movcomes coinci
Looking at AMP heave a
n linear valu
ne 2017, Belgra
Hull form coquantifies thsed on chanotion.
al metric is tthe relative mntially to thetionale beinge hull and e, not absoluvague in ter
RMS, 1/10
Meyers et aistribution, theeding half thd by
bility where tge becomes
plicability. Evrms of locative motion ahalf the draft.
proposes ucenterline, awith respec
points bracke representinhanges. Thedistance fromon becomes
on accommm RoPax ferral distance is
that the prding, so somected as the2 show the prn exceeding a differenceorward pointng move aftves towards ident.
head seas, and pitch areue near non-d
rade, Serbia
onsiderationthe validitynges of wate
that linear semotion is lee top of theg this is thethe concern
ute motions. rms of rela0th highest,
al. (1981) ahe probabilithe draft (crit
the linear ans the limitven so, this ion of pointsand selection.
using points and baselinect to incidentket parallel mng some of te critical dism the mean s decidedly n
modates difry to oil tankhalf the draf
robability chme minimume limit of arobability ofhalf the dra
e between t is the limitift of beam,
the aft poi
Figure 2 ane approximatdimensional
4
s lead to ay of linearerplane area
eakeeping isess than halfe turn of thee wall sidedn is motion This metric
ative motionand point
and applyingty of relativetical distance
(1)
nd non-lineart of linearis somewhats at which ton of critical
at 0.25LBP to evaluatet wave. Themiddle bodythe fore andstance is thewaterline to
non-vertical.fferent hullker. For thisft (3.251m).
hanges withm probabilityapplicability.f the SMP95aft for casesLAMP andng point andthe forwardint line and
nd Figure 9,tely 2% lesswave height
a r a
s f e d n c n t
g e e
)
r r t o l
P e e y d e o . l s
h y .
5 s d d d d
, s t
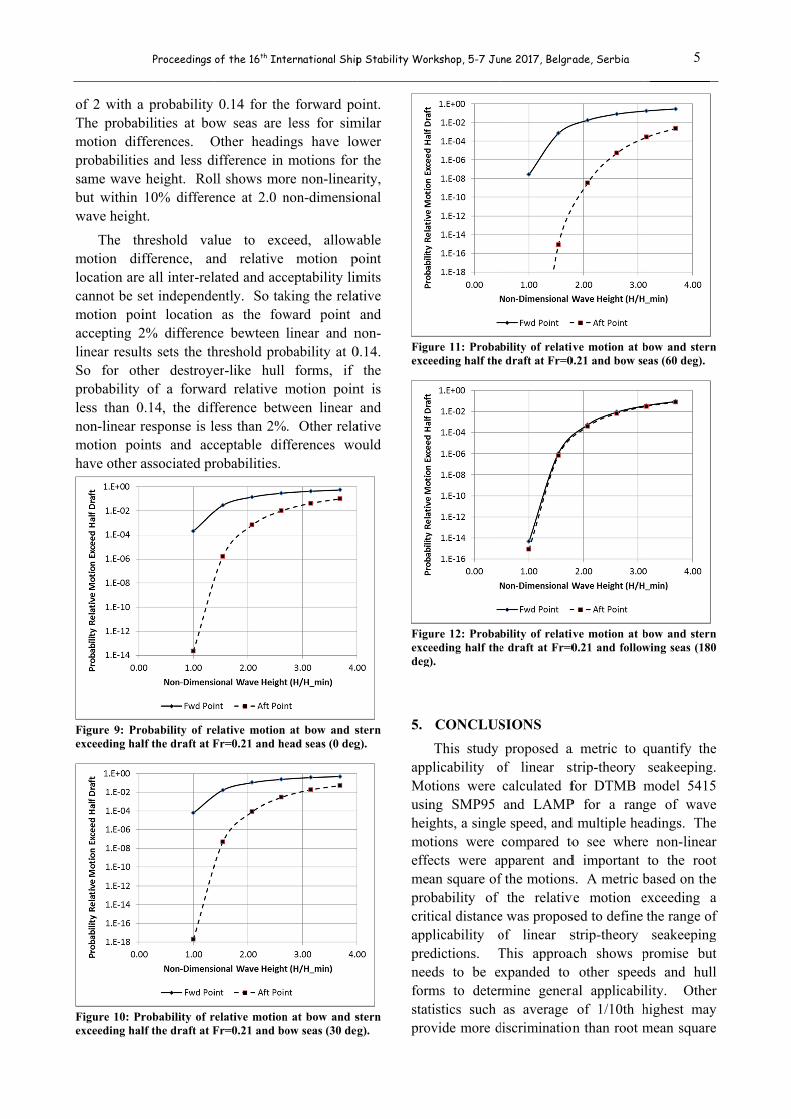
of 2 with aThe probabmotion diffprobabilitiesame wave but within wave height
The thmotion diflocation arecannot be smotion poiaccepting 2linear resultSo for othprobability less than 0non-linear rmotion poihave other a
Figure 9: Proexceeding hal
Figure 10: Prexceeding hal
Proceedings
a probability bilities at boferences. Os and less dheight. Rol10% differet.
hreshold valfference, ane all inter-relet independeint location 2% differencts sets the thher destroyeof a forwar
0.14, the diffresponse is lints and accassociated pr
obability of relf the draft at F
robability of rlf the draft at F
of the 16th Int
0.14 for theow seas are Other headindifference in ll shows mor
ence at 2.0 n
lue to excnd relative ated and accently. So tak
as the fowce bewteen hreshold proer-like hull rd relative m
fference betwess than 2%ceptable difrobabilities.
elative motion Fr=0.21 and he
relative motionFr=0.21 and bo
ternational Ship
e forward poless for sim
ngs have lomotions forre non-linearnon-dimensio
ceed, allowamotion p
ceptability limking the relaward point linear and nbability at 0
forms, if motion poinween linear . Other rela
fferences wo
at bow and sead seas (0 deg
n at bow and sow seas (30 deg
p Stability Wo
oint. milar ower r the rity, onal
able point mits ative
and non-0.14.
the nt is and
ative ould
stern g).
stern g).
Figuexce
Figuexcedeg
5.
appMousinheimoeffemeprocritapppreneeformstatpro
rkshop, 5-7 Ju
ure 11: Probaeeding half the
ure 12: Probaeeding half the).
CONCLUS
This study plicability ootions were ng SMP95 ghts, a singl
otions were ects were aan square of
obability of tical distanceplicability oedictions. Teds to be ems to detertistics such
ovide more d
ne 2017, Belgra
bility of relative draft at Fr=0
bility of relative draft at Fr=0
SIONS
proposed aof linear scalculated fand LAMP
e speed, andcompared to
apparent andf the motions
the relative was proposof linear sThis approaxpanded to
rmine generaas average
discrimination
rade, Serbia
ive motion at b0.21 and bow se
ive motion at b0.21 and follow
a metric to strip-theory for DTMB P for a rangd multiple heo see where
d important s. A metric bve motion esed to define strip-theory ach shows p
other speeral applicabi
of 1/10th hon than root m
5
bow and sterneas (60 deg).
bow and sternwing seas (180
quantify theseakeeping.
model 5415ge of waveadings. Thee non-linearto the root
based on theexceeding athe range ofseakeeping
promise butds and hullility. Otherhighest maymean square
n
n 0
e .
5 e e r t e a f g t l r y e

Proceedings of the 16th International Ship Stability Workshop, 5-7 June 2017, Belgrade, Serbia 6
statistic. Additionally, there may be some complementary metric based on variation in waterplane area that would improve selection of critical distance.
6. ACKNOWLEDGEMENTS
The author would like to thank the many who discussed the idea and provided invaluable computational support. Mr. Robert “Tom” Waters provided a rough idea of the relative motion metric. Mr. Andrew Silver first used the probability of keel emergence in a systematic way in 2016. Mr. Kenneth Weems provided the description of LAMP and the input files for the LAMP calculations.
REFERENCES
Conrad, R., 2005, SMP95: Standard Ship Motion Program
User Manual,” NSWCCD-50-TR–2005/074.
Frank W., 1967, “Oscillation of Cylinders in or Below the Free
Surface of Deep Fluids” DTNSRDC, Rep. No. 2375,
Washington, D.C.
Grigoropoulos, G., Harries,S.,Damala, D., Birk, L. and
Heimann, J., 2003, Seakeeping assessment for high-speed
monohulls –A comparative study, 8thIntl. Marine Design
Conf., Athens, 5-8 May.
Ikeda, Y., Himeno, Y., and Tanaka, N., 1978, “Components of
Roll Damping of Ship at Forward Speed,” Journal of
Society of Naval Architects of Japan, Vol. 143.
Kato, H., 1958, “On the Frictional Resistance to the Roll of
Ships,” Journal of Society of Naval Architects of Japan,
Vol. 102.
Lin, W. M., and Yue, D. K. P., 1990, “Numerical Solutions for
Large-Amplitude Ship Motions in the Time-Domain,”
Proc. the 18th Symposium on Naval Hydrodynamics, The
University of Michigan, Ann Arbor, Michigan.
Lin, W. M., Meinhold, M. J., Salvesen, N. and Yue, D. K. P.,
1994, “Large-Amplitude Motions and Waves Loads for
Ship Design,” Proc. the 20th Symposium on Naval Hy-
drodynamics, University of California, Santa Barbara,
California.
Longo J., Stern F., 2005: “Uncertainty Assessment for Towing
Tank Tests With Example for Surface Combatant DTMB
Model 5415.”J. Ship Research. 49 (1) 55-68.
Meyers W.G., Baitis A.E., 1985, “SMP84: improvements to
capability and prediction accuracy of the standard ship
motion program SMP81” DTNSRDC/SPD-0936-04.
Meyers, W. G., Applebee, T. R., Baitis, A. E., 1981, “User’s
Manual for the Standard Ship Motion Program, SMP,”
DTNSRDC/SPD-0936-01.
NATO Military Agency of Standardisation, 1983, STANAG
4194 Ed3, “Standardized Wave and Wind Environments
and Shipboard Reporting of Sea Conditions”.
O’Dea, J. F. and Walden, D. A., 1985, The Effect of Bow Shape
and Nonlinearities on the Prediction of Large Amplitude
Motions and Deck Wetness,” 15th Symposium on Naval
Hydrodynamics, Hamburg, Germany, Sep 1984, pp. 163-
176.
Salvesen N., Tuck E.O., Faltinsen O., 1970,“Ship Motions and
Sea Loads” Trans. SNAME 78: 250-287.