lexicographic local search and the p-center problem
TRANSCRIPT
European Journal of Operational Research 151 (2003) 265–279
www.elsevier.com/locate/dsw
Lexicographic local search and the p-center problem
Refael Hassin, Asaf Levin *, Dana Morad
Department of Statistics and Operations Research, School of Mathematical Sciences, Tel-Aviv University, Tel-Aviv 69978, Israel
Abstract
We introduce a local search strategy that suits combinatorial optimization problems with a min–max (or max–min)
objective. According to this approach, solutions are compared lexicographically rather then by their worst coordinate.
We apply this approach to the p-center problem.
� 2003 Elsevier B.V. All rights reserved.
Keywords: Facility planning; Heuristics
1. Introduction
The subject of this paper is the application of
local search to the class of bottleneck problems. In
these problems, each feasible solution, say X , isassociated with a vector, say cX 2 Rn, and the goal
is to minimize maxi cXi (or maximize mini cXi ). Forexample, Hochbaum and Shmoys [11] considered a
class of problems in which a weighted graph is
given and we wish to find a subgraph satisfying
some requirements such that the length of the
longest edge included in the subgraph is mini-
mized. Several problems from this class emerging
from routing, location, and communication net-
work design, are described there in detail.We observe that bottleneck problems are quite
insensitive to local changes in the solution. This is
in contrast to the case whereP
i cXi is minimized.
We suggest dealing with this drawback by con-
* Corresponding author.
E-mail addresses: [email protected] (R. Hassin), lev-
[email protected] (A. Levin).
0377-2217/$ - see front matter � 2003 Elsevier B.V. All rights reserv
doi:10.1016/S0377-2217(02)00825-1
sidering a more sensitive measure that ranks so-
lutions which have the same objective value. Our
approach is of sorting the elements of the solution
vectors and then comparing them lexicographi-
cally. We call the resulting algorithm lexicographic
local search. This approach can be incorporated in
various local improvement approaches such assimulated annealing and tabu search.
In recent years many heuristic approaches were
designed that include a local search procedure as a
subroutine. Such approaches include for example
simulating annealing and tabu search. We suggest
to incorporate the proposed lexicographic local
search in such heuristics when solving a bottleneck
problem. We demonstrate the power of using lex-icographic local search in such circumstances by
using it in simulating annealing.
Our goal in this paper is to examine the effect of
modifying a local search heuristic by the use of
lexicographic local search.
We discuss lexicographic local search in the
context of the p-center problem. We present some
theoretical results which motivate our use of lexi-cographic local search and show the limitation of
ed.

266 R. Hassin et al. / European Journal of Operational Research 151 (2003) 265–279
this approach. Then we concentrate on a compu-
tational study. Our results indicate that lexico-
graphic local search is a useful tool. It improves
(with respect to local search) the quality of the
solutions without increasing the computationaleffort. In many cases we were able to receive a
higher frequency of the best solution using lexi-
cographic local search. This higher frequency
means that if we were running the algorithms for a
shorter time period the chances of getting the
better result would be higher.
An interesting bottleneck problem is that of
minimizing the maximum completion time whenscheduling jobs on m parallel machines. Here a
solution is associated with an m-vector giving the
completion time on each machine. Glass et al. [7]
applied local search to this problem. They defined
as an improvement a step that either decreases the
maximum completion time or keeps it unchanged
but decreases the number of machines that achieve
it. Lexicographic search can be considered as afurther step towards improving the sensitivity of
the search to promising directions by considering
not only the number of occurrences of the maxi-
mum completion time but also the next highest
completion times.
F€uurer and Raghavachari [5] developed an ap-
proximation algorithm for minimizing the maxi-
mum node degree of a spanning tree. The localsearch they developed swaps pairs of edges when
the maximum degree of the four nodes involved is
reduced, even when this does not affect the maxi-
mum degree of the tree. A different variation ap-
pears in [6]. This approach can be viewed as a
variation of lexicographic local search.
Finally, Khanna et al. [12] developed a general
paradigm, non-oblivious local search, in which localoptimality is defined according to a function which
does not just rank solutions that are identical with
respect to the original function, as we do, but in
fact ranks solutions in a different way from that
dictated by the original function. They demon-
strate that a clever choice of this function may
improve the theoretical approximation ratio.
In the next sections we provide a brief descrip-tion of several algorithms for the p-center problemincluding the lexicographic local search. We then
present a worst-case analysis for the p-center
problem of the lexicographic local search and the
other algorithms and we finally present results of a
computational study for the p-center problem and
conclusions we draw from it.
2. The p-center problem
In the p-center problem, a finite set V is given
with a non-negative distance matrix d ¼ dij; i;j 2 V . For a subset X � V , let DiX ¼ minj2X dij bethe distance of i 2 V from the subset X . The
problem is to find X � V such that jX j ¼ p andF ðX Þ ¼ maxv2V DvX is minimized. We call F ðX Þ theradius of X . In an illustrative description of the
problem, V is a set of customers to be served by pservice centers. The goal is to locate the centers so
that the maximum travel time of a customer to the
nearest center is minimized.
The p-center problem is NP-hard even when Vis a set of points in the two dimensional plane andd describes the Euclidean distances among the
points [4]. Assuming that the distance matrix is
symmetric and obeys the triangle inequality, the
polynomial algorithms of Dyer and Frieze [3],
Hochbaum and Shmoys [10] and Plesn�ıık [13] are
fast and guarantee an approximation which is
bounded by twice the optimal solution�s value.
These algorithms are designed to achieve the errorbound and will often produce solutions with an
error that cannot be accepted for practical com-
putations. There are other algorithms that usually
perform well while theoretically their running time
may not be polynomially bounded and the solu-
tions they provide cannot be bounded in the worst
case by any constant. An important example is an
algorithm of Drezner [2] (Cooper [1] used earlier asimilar method for related problems).
3. Local search
The local search approach assumes that for
each solution, X , a neighborhood, NX , is defined.
Then, in each iteration the neighborhood is sear-ched for an improved solution. A natural defini-
tion of a neighborhood in the p-center problem is
the set of solutions obtained by relocating at most

R. Hassin et al. / European Journal of Operational Research 151 (2003) 265–279 267
k centers of the current solution, for some pre-
specified k. In our study we assume k ¼ 1.
Algorithm LS:
1. Start with an arbitrary solution X . (This may be
the output of some other heuristic.)
2. Let NX be the set of solutions obtained from Xby relocating a single center. Scan NX for a bet-ter solution, X 0. If none exists, stop and output
X . Else, replace X by X 0 and repeat.
The search terminates in a local optimum, a
solution which is best in its neighborhood. Clearly,
the specific output depends on the choice of the
initial solution, and a common practice is to repeat
the search many times, starting from different ini-tial solutions, and finally select the best outcome.
We note that each iteration of the algorithm
(i.e., reaching a local minimum from a given initial
point) requires polynomial time. The reason is that
the number of improvements is bounded by the
number of distinct distance values which is Oðn2Þ.In many applications d is symmetric and satis-
fies the triangle inequality. In the case of twocenters we can use these properties to prove a
performance guarantee for the algorithm.
Theorem 3.1. If d is symmetric and the triangleinequality is satisfied, then the radius of the 2-centersolution produced by Algorithm LS is at most twicethe size of the radius of an optimal solution. Thisbound is tight.
Proof. Let fx1; x2g be an optimal solution with
radius r. Let S1, S2 be a partition of V such that
dv;xi 6 r; v 2 Si; i ¼ 1; 2. For example, Si may be
the set of customers serviced by the center at xiunder the optimal solution. Then, it follows from
the triangle inequality that any solution fy; zg such
that y 2 S1, z 2 S2 satisfies dvy 6 dv;x1 þ dx1;y 6 2r forv 2 S1, and dvz 6 dv;x2 þ dx2;z 6 2r for v 2 S2. Hence,
the radius of any such solution is at most 2r. Itnow follows that a solution whose radius is strictly
greater than 2r cannot be a local minimum since it
must have its two centers located in the same
subset Si and by relocating a center to the other
subset the radius is improved to a value at most 2r.
Consider now four points on the line with co-
ordinates 0; 1; 2; 4. The 2-center solution is f1; 4gwith radius 1. But the solution f0; 2g is a local
minimum and its radius is 2. This proves that the
bound stated by the proposition is tight. �
For p > 2, the ratio of the approximate solution
to the optimal cannot be bounded by a constant.
This will follow from a stronger claim presented in
the next section.
4. Lexicographic local search
Consider a 2-center example. Six points with
coordinates f0; 10; 19; 21; 30; 40g are located on a
line. Consider the solution X ¼ f19; 21g. To im-
prove it, both of its centers must be moved.
Therefore it is a local minimum with respect to LS.
Note however that by moving one of the centers of
X we can reduce the number of points whose dis-tance from their nearest center is 19. Such a
change, while not reducing the radius, is a good
move towards reducing the radius in a following
step.
This example motivates a modification of the
objective function that will make it more sensitive
to promising changes in the solution.
Consider two vectors x; y 2 Rn. Let x0, y0 be thevectors obtained by permuting x, y respectively, so
that x01 P x02 P � � � P x0n and y 01 P y 02 P � � � P y 0n.We say that x is ‘-lexicographically equal to y if forall k 2 f1; . . . ; ‘g, x0k ¼ y0k. We say that x is ‘-lexi-cographically smaller than y if for some k 2f1; . . . ; ‘g, x0i ¼ y 0i ; i ¼ 1; . . . ; k � 1 and x0k < y0k.
The algorithm which we propose in this paper is
a local search variation that scans the neighbor-hood to find an ‘-lexicographically smaller solu-
tion, where ‘ is a predetermined parameter.
Algorithm ‘LEX:
1. Start with an arbitrary solution X .
2. Scan NX for an ‘-lexicographically smaller solu-
tion, X 0 (first improvement). If none exists, stop
and output X . Else, replace X by X 0 and repeat.
In the p-center problem, we associate with each
solution a vector x 2 Rn, where xi is the distance
268 R. Hassin et al. / European Journal of Operational Research 151 (2003) 265–279
between node i and its nearest center in the solu-
tion. We apply the lexicographic local search to
obtain a lexicographic local minimum with respect
to this measure.
We note that for any fixed ‘ value, each itera-tion of the algorithm (reaching an ‘-lexicographiclocal minimum from a given initial point) requires
polynomial time. The reason is that the number of
improvements is OðN ‘Þ, where N is the number of
distinct values in the distance matrix d.Clearly 1LEX is equivalent to LS, and 2LEX is
sufficient to reach the optimal solution in the ex-
ample that opened this section. One could gener-alize this example to justify higher ‘ values. Let
V ¼ V1 [ V2 [ V3 where the subsets are of equal
size. Suppose that the distances between points in
each of the subsets are zero, while between subsets
the distances are of one unit. An optimal solution
for pP 3 locates at least one center in each of the
three subsets and its radius is zero. However, a
solution that locates all the centers within onesubset is ‘LEX optimal for all ‘6 n=3, since by
moving one center to another subset DiX remains
one for all points i in the third subset. We conclude
that the ratio of the ‘LEX solution to the optimal
in the worst case cannot be bounded by a constant.
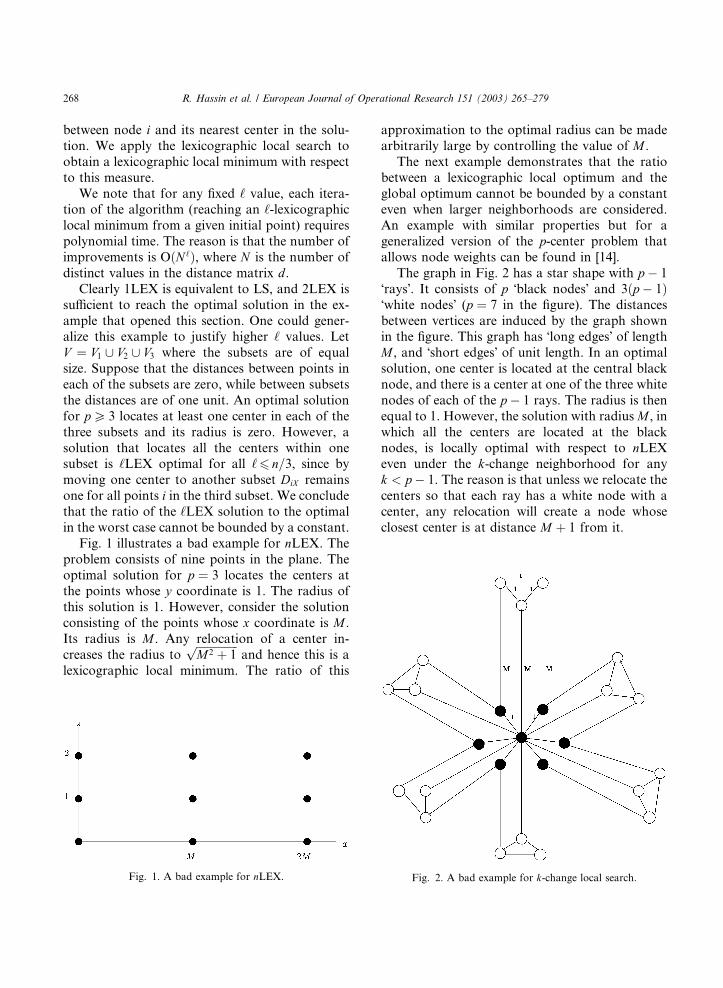
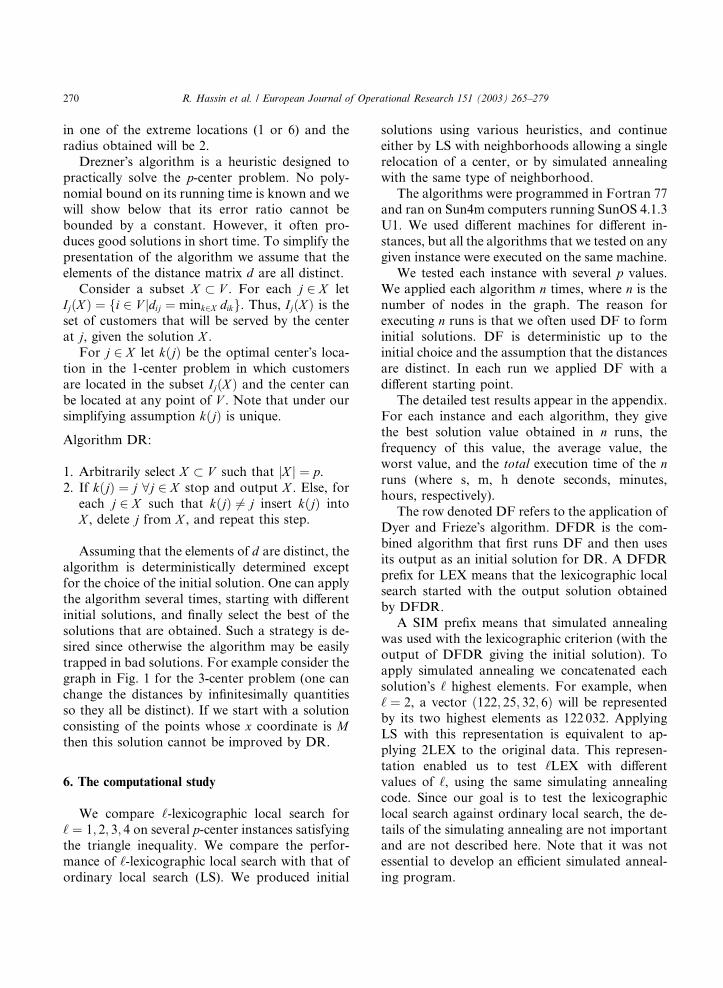
Fig. 1 illustrates a bad example for nLEX. The
problem consists of nine points in the plane. The
optimal solution for p ¼ 3 locates the centers atthe points whose y coordinate is 1. The radius of
this solution is 1. However, consider the solution
consisting of the points whose x coordinate is M .
Its radius is M . Any relocation of a center in-
creases the radius toffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiM2 þ 1
pand hence this is a
lexicographic local minimum. The ratio of this
Fig. 1. A bad example for nLEX.
approximation to the optimal radius can be made
arbitrarily large by controlling the value of M .
The next example demonstrates that the ratio
between a lexicographic local optimum and the
global optimum cannot be bounded by a constanteven when larger neighborhoods are considered.
An example with similar properties but for a
generalized version of the p-center problem that
allows node weights can be found in [14].
The graph in Fig. 2 has a star shape with p � 1
�rays�. It consists of p �black nodes� and 3ðp � 1Þ�white nodes� (p ¼ 7 in the figure). The distances
between vertices are induced by the graph shownin the figure. This graph has �long edges� of lengthM , and �short edges� of unit length. In an optimal
solution, one center is located at the central black
node, and there is a center at one of the three white
nodes of each of the p � 1 rays. The radius is then
equal to 1. However, the solution with radiusM , in
which all the centers are located at the black
nodes, is locally optimal with respect to nLEXeven under the k-change neighborhood for any
k < p � 1. The reason is that unless we relocate the
centers so that each ray has a white node with a
center, any relocation will create a node whose
closest center is at distance M þ 1 from it.
Fig. 2. A bad example for k-change local search.

R. Hassin et al. / European Journal of Operational Research 151 (2003) 265–279 269
However, we are able to show that when the
points are distinct points on a line (1-dimension
space) 2LEX provides a 2-approximation algo-
rithm for the 3-center problem whereas LS does
not provide us any constant error ratio as can beseen by the following example:
Let V ¼ f0;M ;M þ 1;M þ 2; 2M þ 2g. The
optimal 3-center is f0;M þ 1; 2M þ 2g with unit
radius. However, fM ;M þ 1;M þ 2g is a local
optimum for LS with radius M .
Theorem 4.1. 2LEX is a 2-approximation algo-rithm for the 3-center problem when all the pointsare distinct points on a line.
Proof. Every solution divides the line into three
segments such that all the points on a segment are
served by the same center. Consider the partition
induced by an optimal solution. Any solution that
locates one center in every segment has a radius of
at most twice the optimal. Consider a 2LEX localoptimum.
If there is one center in each segment it is a
2-approximation.
If there is a segment with two centers and an-
other one with one center, moving one of the two
centers to the third segment will guarantee a 2-
approximation. The algorithm decided not to
move to this solution and therefore, the currentradius is at most twice the optimum.
The remaining case is that there is a segment
with three centers. In order for this solution to
have a radius which is more than twice the opti-
mum, the maximum distance must not be achieved
in the segment of the three centers. If there is only
one point with distance from its nearest center
which is the maximum distance then moving acenter to the segment which contains this point
will reduce the radius. Therefore, there are exactly
two points, a and b, with a distance from their
nearest neighbor which equals the maximum dis-
tance (as all the points are distinct). By moving a
center (the middle center) to another segment (that
contains a) we reach a new solution in which one
of the two maximum distances of the current so-lution is reduced (the distance from a). The dis-
tances which were increased are at most twice the
optimum (these are distances in the segment where
the three centers were located). As the current
solution is a 2LEX local optimum (by assumption)
this case is not possible and the radius is at most
twice the optimal value. �
The bound of the above theorem cannot be
improved as shown by the following example:
Consider the p-center problem on the line with
points f1; 2; 3; 4; 5; 6; . . . ; 3p � 2; 3p � 1; 3pg. The
optimal solution is f2; 5; . . . ; 3p � 1g and it has
radius 1. However, the solution f1; 4; . . . ; 3p � 2gis n-LEX optimal but it has radius 2 (this is so for
pP 2). The distance vector of this solution consistof one entry of 2, 2p � 1 entries of 1 and the rest
are 0. To improve lexicographically one must
change all the centers of the current solution.
The result of Theorem 4.1 cannot be extended
to higher dimension Euclidean spaces and in par-
ticular the graph in Fig. 1 shows that in R2 nLEXdoes not guarantee any constant error ratio when
p ¼ 3.
5. Fast algorithms for the p-center problem
The algorithm of Dyer and Frieze [3] runs in
OðpnÞ time where n ¼ jV j. It is a 2-approximation
for the problem when d satisfies the triangle in-
equality.
Algorithm DF:
1. Locate the first center at an arbitrary pointv 2 V .
2. Given a set of centers X � V . If jX j ¼ p, stopand output X . Else, locate the next center at a
point v 2 V satisfying DvX ¼ maxu2V DuX .
In our computational study, we executed n runs
starting with all possible initial choices. Our
computational study indicates that this imple-mentation is practically useful, however, it does
not improve the error bound of 2 even in the
(polynomially solvable) case of p ¼ 2, as demon-
strated by the following example. Consider six
points on a line with coordinates f1; 2; 3; 4; 5; 6g.Let p ¼ 2. The optimal solution locates the centers
at 2 and 5 and has a radius 1. No matter what is
the initial point, DF will locate the second center
270 R. Hassin et al. / European Journal of Operational Research 151 (2003) 265–279
in one of the extreme locations (1 or 6) and the
radius obtained will be 2.
Drezner�s algorithm is a heuristic designed to
practically solve the p-center problem. No poly-
nomial bound on its running time is known and wewill show below that its error ratio cannot be
bounded by a constant. However, it often pro-
duces good solutions in short time. To simplify the
presentation of the algorithm we assume that the
elements of the distance matrix d are all distinct.
Consider a subset X � V . For each j 2 X let
IjðX Þ ¼ fi 2 V jdij ¼ mink2X dikg. Thus, IjðX Þ is theset of customers that will be served by the centerat j, given the solution X .
For j 2 X let kðjÞ be the optimal center�s loca-tion in the 1-center problem in which customers
are located in the subset IjðX Þ and the center can
be located at any point of V . Note that under our
simplifying assumption kðjÞ is unique.
Algorithm DR:
1. Arbitrarily select X � V such that jX j ¼ p.2. If kðjÞ ¼ j 8j 2 X stop and output X . Else, for
each j 2 X such that kðjÞ 6¼ j insert kðjÞ intoX , delete j from X , and repeat this step.
Assuming that the elements of d are distinct, the
algorithm is deterministically determined except
for the choice of the initial solution. One can apply
the algorithm several times, starting with different
initial solutions, and finally select the best of the
solutions that are obtained. Such a strategy is de-sired since otherwise the algorithm may be easily
trapped in bad solutions. For example consider the
graph in Fig. 1 for the 3-center problem (one can
change the distances by infinitesimally quantities
so they all be distinct). If we start with a solution
consisting of the points whose x coordinate is Mthen this solution cannot be improved by DR.
6. The computational study
We compare ‘-lexicographic local search for
‘ ¼ 1; 2; 3; 4 on several p-center instances satisfyingthe triangle inequality. We compare the perfor-
mance of ‘-lexicographic local search with that of
ordinary local search (LS). We produced initial
solutions using various heuristics, and continue
either by LS with neighborhoods allowing a single
relocation of a center, or by simulated annealing
with the same type of neighborhood.
The algorithms were programmed in Fortran 77and ran on Sun4m computers running SunOS 4.1.3
U1. We used different machines for different in-
stances, but all the algorithms that we tested on any
given instance were executed on the same machine.
We tested each instance with several p values.
We applied each algorithm n times, where n is the
number of nodes in the graph. The reason for
executing n runs is that we often used DF to forminitial solutions. DF is deterministic up to the
initial choice and the assumption that the distances
are distinct. In each run we applied DF with a
different starting point.
The detailed test results appear in the appendix.
For each instance and each algorithm, they give
the best solution value obtained in n runs, the
frequency of this value, the average value, theworst value, and the total execution time of the nruns (where s, m, h denote seconds, minutes,
hours, respectively).
The row denoted DF refers to the application of
Dyer and Frieze�s algorithm. DFDR is the com-
bined algorithm that first runs DF and then uses
its output as an initial solution for DR. A DFDR
prefix for LEX means that the lexicographic localsearch started with the output solution obtained
by DFDR.
A SIM prefix means that simulated annealing
was used with the lexicographic criterion (with the
output of DFDR giving the initial solution). To
apply simulated annealing we concatenated each
solution�s ‘ highest elements. For example, when
‘ ¼ 2, a vector ð122; 25; 32; 6Þ will be representedby its two highest elements as 122 032. Applying
LS with this representation is equivalent to ap-
plying 2LEX to the original data. This represen-
tation enabled us to test ‘LEX with different
values of ‘, using the same simulating annealing
code. Since our goal is to test the lexicographic
local search against ordinary local search, the de-
tails of the simulating annealing are not importantand are not described here. Note that it was not
essential to develop an efficient simulated anneal-
ing program.

R. Hassin et al. / European Journal of Operational Research 151 (2003) 265–279 271
In our computational study, we changed the
solution whenever a lexicographic improvement
was detected.
On small problems, with up to 50 nodes and
p ¼ 10, the use of lexicographic search was notjustified since the optimal solutions (that were
found separately using an Integer Programming
solver) were also often found by the faster DFDR
algorithm or by LS.
We will present a summary of the results ac-
cording to different criteria. We say that Algo-
rithm A performed better than Algorithm B on a
given instance if the best solution returned by A isbetter than the one returned by B, or the best so-
lutions have the same value but A returned the
best solution more frequently, or if both A and B
returned the same best solution the same num-
ber of times but the average value returned by A
was better. Lastly, A is better than B if both al-
gorithms performed equally with respect to all of
the above mentioned criteria, and A was fasterthan B.
In our study we obtained that DFDR‘LEX is
better than ‘LEX:
• DFDR1LEX had better results on 30 instances
(in 14 instances it produced a better best solu-
tion), whereas 1LEX had better results on six
instances (in one of them it produced a betterbest solution).
• DFDR2LEX had better results on 22 instances
(in eight instances it produced a better best so-
lution), whereas 2LEX had better results on
14 instances (in four instances it produced a bet-
ter best solution).
• DFDR3LEX had better results on 21 instances
(in three instances it produced a better best so-lution), whereas 3LEX had better results on 15
instances (in four instances it produced a better
best solution).
• DFDR4LEX had better results on 19 instances
(in one instance it produced a better best solu-
tion), whereas 4LEX had better results on 17 in-
stances (in one instance it produced a better
best solution).
The following is a summary of the results
comparing ‘LEX to ð‘þ 1ÞLEX:
• 2LEX had better results on 35 instances (in 17
instances it produced a better best solution),
whereas 1LEX had better results on one in-
stance (it never produced a better best result).• 3LEX had better results on 30 instances (in se-
ven instances it produced a better best solution),
whereas 2LEX had better results on four in-
stances (it never produced a better best result).
• 4LEX had better results on 28 instances (in
three instances it produced a better best solu-
tion), whereas 3LEX had better results on six
instances (in one instance it produced a betterbest solution).
The following is a summary of the results
comparing DFDR‘LEX to DFDRð‘þ 1ÞLEX:
• DFDR2LEX had better results on 30 instances
(in three instances it produced a better best so-
lution), whereas DFDR1LEX had better resultson three instances (it never produced a better
best result).
• DFDR3LEX had better results on 22 instances
(in one instance it produced a better best solu-
tion), whereas DFDR2LEX had better results
on 9 instances (it never produced a better best
result).
• DFDR4LEX had better results on 21 instances(in one instance it produced a better best solu-
tion), whereas DFDR3LEX had better results
on 12 instances (in one instance it produced a
better best solution).
The following is a summary of the results
comparing SIM‘LEX to SIMð‘þ 1ÞLEX:
• SIM2LEX had better results on 20 instances (inone instance it produced a better best solution),
whereas SIM1LEX had better results on nine in-
stances (it never produced a better best result).
• SIM3LEX had better results on 13 instances (in
one instance it produced a better best solution),
whereas SIM2LEX had better results on 10 in-
stances (it never produced a better best result).
• SIM4LEX had better results on 11 instances (itnever produced a better best result), whereas
SIM3LEX had better results on 15 instances
(it never produced a better best result).
272 R. Hassin et al. / European Journal of Operational Research 151 (2003) 265–279
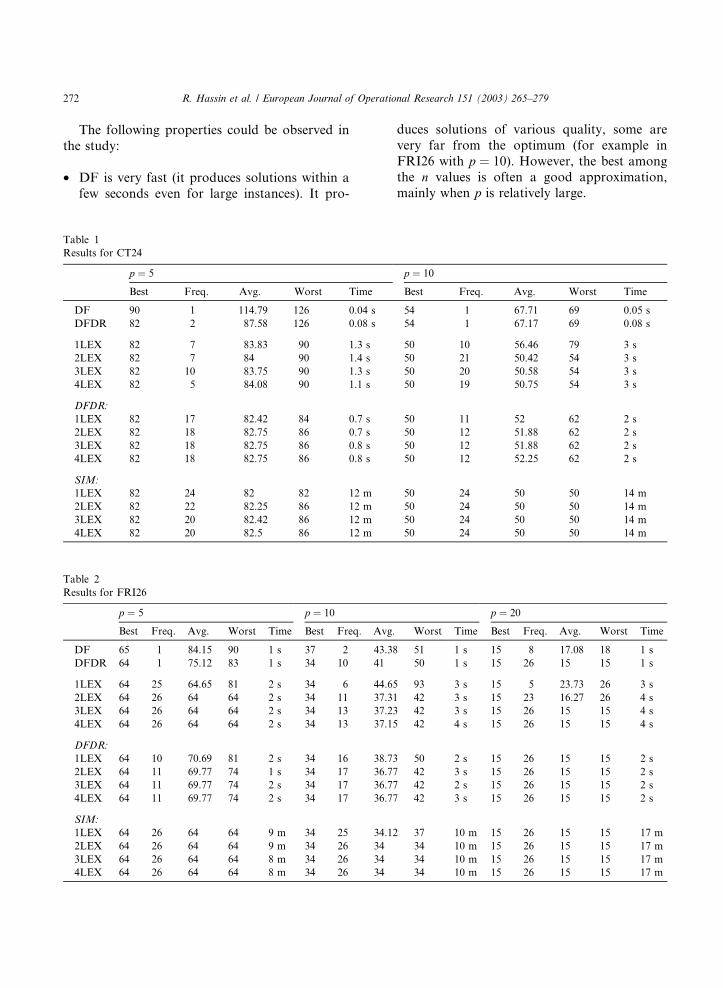
The following properties could be observed in
the study:
• DF is very fast (it produces solutions within a
few seconds even for large instances). It pro-
Table 1
Results for CT24
p ¼ 5
Best Freq. Avg. Worst Time
DF 90 1 114.79 126 0.04 s
DFDR 82 2 87.58 126 0.08 s
1LEX 82 7 83.83 90 1.3 s
2LEX 82 7 84 90 1.4 s
3LEX 82 10 83.75 90 1.3 s
4LEX 82 5 84.08 90 1.1 s
DFDR:
1LEX 82 17 82.42 84 0.7 s
2LEX 82 18 82.75 86 0.7 s
3LEX 82 18 82.75 86 0.8 s
4LEX 82 18 82.75 86 0.8 s
SIM:
1LEX 82 24 82 82 12 m
2LEX 82 22 82.25 86 12 m
3LEX 82 20 82.42 86 12 m
4LEX 82 20 82.5 86 12 m
Table 2
Results for FRI26
p ¼ 5 p ¼ 10
Best Freq. Avg. Worst Time Best Freq. A
DF 65 1 84.15 90 1 s 37 2 4
DFDR 64 1 75.12 83 1 s 34 10 4
1LEX 64 25 64.65 81 2 s 34 6 4
2LEX 64 26 64 64 2 s 34 11 3
3LEX 64 26 64 64 2 s 34 13 3
4LEX 64 26 64 64 2 s 34 13 3
DFDR:
1LEX 64 10 70.69 81 2 s 34 16 3
2LEX 64 11 69.77 74 1 s 34 17 3
3LEX 64 11 69.77 74 2 s 34 17 3
4LEX 64 11 69.77 74 2 s 34 17 3
SIM:
1LEX 64 26 64 64 9 m 34 25 3
2LEX 64 26 64 64 9 m 34 26 3
3LEX 64 26 64 64 8 m 34 26 3
4LEX 64 26 64 64 8 m 34 26 3
duces solutions of various quality, some are
very far from the optimum (for example in
FRI26 with p ¼ 10). However, the best among
the n values is often a good approximation,mainly when p is relatively large.
p ¼ 10
Best Freq. Avg. Worst Time
54 1 67.71 69 0.05 s
54 1 67.17 69 0.08 s
50 10 56.46 79 3 s
50 21 50.42 54 3 s
50 20 50.58 54 3 s
50 19 50.75 54 3 s
50 11 52 62 2 s
50 12 51.88 62 2 s
50 12 51.88 62 2 s
50 12 52.25 62 2 s
50 24 50 50 14 m
50 24 50 50 14 m
50 24 50 50 14 m
50 24 50 50 14 m
p ¼ 20
vg. Worst Time Best Freq. Avg. Worst Time
3.38 51 1 s 15 8 17.08 18 1 s
1 50 1 s 15 26 15 15 1 s
4.65 93 3 s 15 5 23.73 26 3 s
7.31 42 3 s 15 23 16.27 26 4 s
7.23 42 3 s 15 26 15 15 4 s
7.15 42 4 s 15 26 15 15 4 s
8.73 50 2 s 15 26 15 15 2 s
6.77 42 3 s 15 26 15 15 2 s
6.77 42 2 s 15 26 15 15 2 s
6.77 42 3 s 15 26 15 15 2 s
4.12 37 10 m 15 26 15 15 17 m
4 34 10 m 15 26 15 15 17 m
4 34 10 m 15 26 15 15 17 m
4 34 10 m 15 26 15 15 17 m
R. Hassin et al. / European Journal of Operational Research 151 (2003) 265–279 273
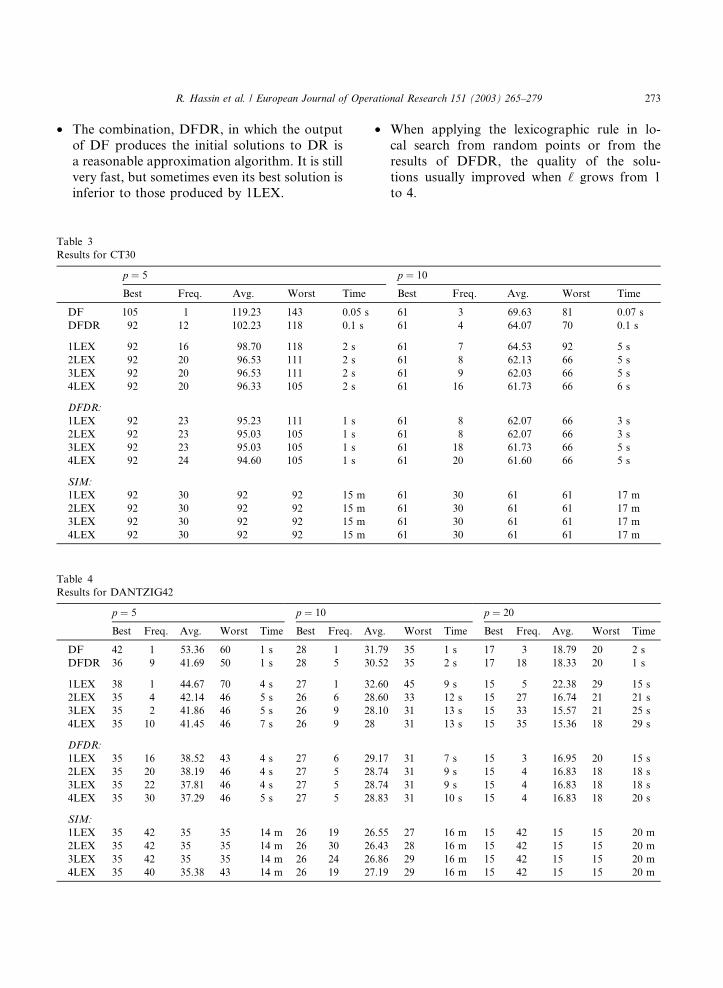
• The combination, DFDR, in which the output
of DF produces the initial solutions to DR is
a reasonable approximation algorithm. It is still
very fast, but sometimes even its best solution isinferior to those produced by 1LEX.
Table 3
Results for CT30
p ¼ 5
Best Freq. Avg. Worst Time
DF 105 1 119.23 143 0.05 s
DFDR 92 12 102.23 118 0.1 s
1LEX 92 16 98.70 118 2 s
2LEX 92 20 96.53 111 2 s
3LEX 92 20 96.53 111 2 s
4LEX 92 20 96.33 105 2 s
DFDR:
1LEX 92 23 95.23 111 1 s
2LEX 92 23 95.03 105 1 s
3LEX 92 23 95.03 105 1 s
4LEX 92 24 94.60 105 1 s
SIM:
1LEX 92 30 92 92 15 m
2LEX 92 30 92 92 15 m
3LEX 92 30 92 92 15 m
4LEX 92 30 92 92 15 m
Table 4
Results for DANTZIG42
p ¼ 5 p ¼ 10
Best Freq. Avg. Worst Time Best Freq. A
DF 42 1 53.36 60 1 s 28 1 31
DFDR 36 9 41.69 50 1 s 28 5 30
1LEX 38 1 44.67 70 4 s 27 1 32
2LEX 35 4 42.14 46 5 s 26 6 28
3LEX 35 2 41.86 46 5 s 26 9 28
4LEX 35 10 41.45 46 7 s 26 9 28
DFDR:
1LEX 35 16 38.52 43 4 s 27 6 29
2LEX 35 20 38.19 46 4 s 27 5 28
3LEX 35 22 37.81 46 4 s 27 5 28
4LEX 35 30 37.29 46 5 s 27 5 28
SIM:
1LEX 35 42 35 35 14 m 26 19 26
2LEX 35 42 35 35 14 m 26 30 26
3LEX 35 42 35 35 14 m 26 24 26
4LEX 35 40 35.38 43 14 m 26 19 27
• When applying the lexicographic rule in lo-
cal search from random points or from the
results of DFDR, the quality of the solu-
tions usually improved when ‘ grows from 1to 4.
p ¼ 10
Best Freq. Avg. Worst Time
61 3 69.63 81 0.07 s
61 4 64.07 70 0.1 s
61 7 64.53 92 5 s
61 8 62.13 66 5 s
61 9 62.03 66 5 s
61 16 61.73 66 6 s
61 8 62.07 66 3 s
61 8 62.07 66 3 s
61 18 61.73 66 5 s
61 20 61.60 66 5 s
61 30 61 61 17 m
61 30 61 61 17 m
61 30 61 61 17 m
61 30 61 61 17 m
p ¼ 20
vg. Worst Time Best Freq. Avg. Worst Time
.79 35 1 s 17 3 18.79 20 2 s
.52 35 2 s 17 18 18.33 20 1 s
.60 45 9 s 15 5 22.38 29 15 s
.60 33 12 s 15 27 16.74 21 21 s
.10 31 13 s 15 33 15.57 21 25 s
31 13 s 15 35 15.36 18 29 s
.17 31 7 s 15 3 16.95 20 15 s
.74 31 9 s 15 4 16.83 18 18 s
.74 31 9 s 15 4 16.83 18 18 s
.83 31 10 s 15 4 16.83 18 20 s
.55 27 16 m 15 42 15 15 20 m
.43 28 16 m 15 42 15 15 20 m
.86 29 16 m 15 42 15 15 20 m
.19 29 16 m 15 42 15 15 20 m
274 R. Hassin et al. / European Journal of Operational Research 151 (2003) 265–279
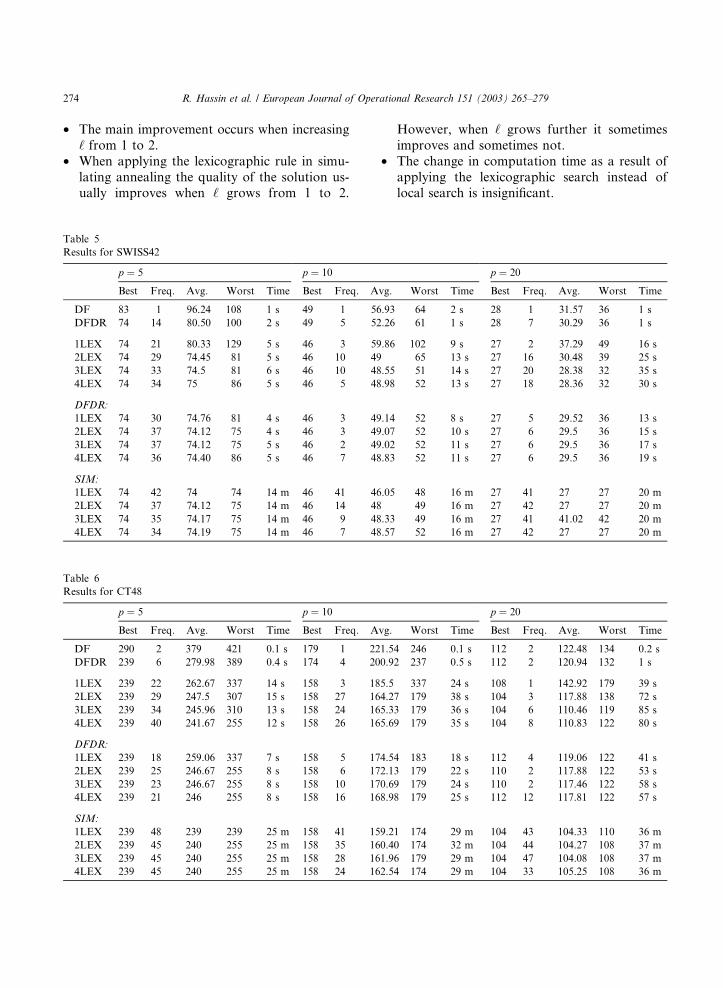
• The main improvement occurs when increasing
‘ from 1 to 2.
• When applying the lexicographic rule in simu-
lating annealing the quality of the solution us-ually improves when ‘ grows from 1 to 2.
Table 5
Results for SWISS42
p ¼ 5 p ¼ 10
Best Freq. Avg. Worst Time Best Freq. A
DF 83 1 96.24 108 1 s 49 1 56
DFDR 74 14 80.50 100 2 s 49 5 52
1LEX 74 21 80.33 129 5 s 46 3 59
2LEX 74 29 74.45 81 5 s 46 10 49
3LEX 74 33 74.5 81 6 s 46 10 48
4LEX 74 34 75 86 5 s 46 5 48
DFDR:
1LEX 74 30 74.76 81 4 s 46 3 49
2LEX 74 37 74.12 75 4 s 46 3 49
3LEX 74 37 74.12 75 5 s 46 2 49
4LEX 74 36 74.40 86 5 s 46 7 48
SIM:
1LEX 74 42 74 74 14 m 46 41 46
2LEX 74 37 74.12 75 14 m 46 14 48
3LEX 74 35 74.17 75 14 m 46 9 48
4LEX 74 34 74.19 75 14 m 46 7 48
Table 6
Results for CT48
p ¼ 5 p ¼ 10
Best Freq. Avg. Worst Time Best Freq. A
DF 290 2 379 421 0.1 s 179 1 22
DFDR 239 6 279.98 389 0.4 s 174 4 20
1LEX 239 22 262.67 337 14 s 158 3 18
2LEX 239 29 247.5 307 15 s 158 27 16
3LEX 239 34 245.96 310 13 s 158 24 16
4LEX 239 40 241.67 255 12 s 158 26 16
DFDR:
1LEX 239 18 259.06 337 7 s 158 5 17
2LEX 239 25 246.67 255 8 s 158 6 17
3LEX 239 23 246.67 255 8 s 158 10 17
4LEX 239 21 246 255 8 s 158 16 16
SIM:
1LEX 239 48 239 239 25 m 158 41 15
2LEX 239 45 240 255 25 m 158 35 16
3LEX 239 45 240 255 25 m 158 28 16
4LEX 239 45 240 255 25 m 158 24 16
However, when ‘ grows further it sometimes
improves and sometimes not.
• The change in computation time as a result of
applying the lexicographic search instead oflocal search is insignificant.
p ¼ 20
vg. Worst Time Best Freq. Avg. Worst Time
.93 64 2 s 28 1 31.57 36 1 s
.26 61 1 s 28 7 30.29 36 1 s
.86 102 9 s 27 2 37.29 49 16 s
65 13 s 27 16 30.48 39 25 s
.55 51 14 s 27 20 28.38 32 35 s
.98 52 13 s 27 18 28.36 32 30 s
.14 52 8 s 27 5 29.52 36 13 s
.07 52 10 s 27 6 29.5 36 15 s
.02 52 11 s 27 6 29.5 36 17 s
.83 52 11 s 27 6 29.5 36 19 s
.05 48 16 m 27 41 27 27 20 m
49 16 m 27 42 27 27 20 m
.33 49 16 m 27 41 41.02 42 20 m
.57 52 16 m 27 42 27 27 20 m
p ¼ 20
vg. Worst Time Best Freq. Avg. Worst Time
1.54 246 0.1 s 112 2 122.48 134 0.2 s
0.92 237 0.5 s 112 2 120.94 132 1 s
5.5 337 24 s 108 1 142.92 179 39 s
4.27 179 38 s 104 3 117.88 138 72 s
5.33 179 36 s 104 6 110.46 119 85 s
5.69 179 35 s 104 8 110.83 122 80 s
4.54 183 18 s 112 4 119.06 122 41 s
2.13 179 22 s 110 2 117.88 122 53 s
0.69 179 24 s 110 2 117.46 122 58 s
8.98 179 25 s 112 12 117.81 122 57 s
9.21 174 29 m 104 43 104.33 110 36 m
0.40 174 32 m 104 44 104.27 108 37 m
1.96 179 29 m 104 47 104.08 108 37 m
2.54 174 29 m 104 33 105.25 108 36 m
R. Hassin et al. / European Journal of Operational Research 151 (2003) 265–279 275
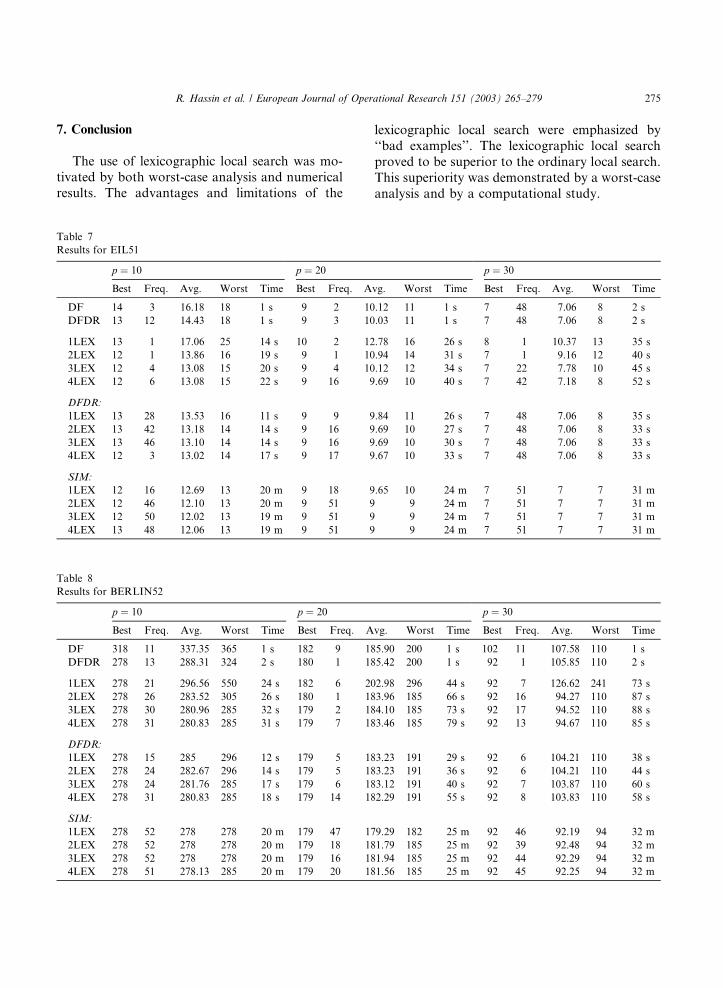
7. Conclusion
The use of lexicographic local search was mo-
tivated by both worst-case analysis and numericalresults. The advantages and limitations of the
Table 7
Results for EIL51
p ¼ 10 p ¼ 20
Best Freq. Avg. Worst Time Best Freq. A
DF 14 3 16.18 18 1 s 9 2 10
DFDR 13 12 14.43 18 1 s 9 3 10
1LEX 13 1 17.06 25 14 s 10 2 12
2LEX 12 1 13.86 16 19 s 9 1 10
3LEX 12 4 13.08 15 20 s 9 4 10
4LEX 12 6 13.08 15 22 s 9 16 9
DFDR:
1LEX 13 28 13.53 16 11 s 9 9 9
2LEX 13 42 13.18 14 14 s 9 16 9
3LEX 13 46 13.10 14 14 s 9 16 9
4LEX 12 3 13.02 14 17 s 9 17 9
SIM:
1LEX 12 16 12.69 13 20 m 9 18 9
2LEX 12 46 12.10 13 20 m 9 51 9
3LEX 12 50 12.02 13 19 m 9 51 9
4LEX 13 48 12.06 13 19 m 9 51 9
Table 8
Results for BERLIN52
p ¼ 10 p ¼ 20
Best Freq. Avg. Worst Time Best Freq. A
DF 318 11 337.35 365 1 s 182 9 18
DFDR 278 13 288.31 324 2 s 180 1 18
1LEX 278 21 296.56 550 24 s 182 6 20
2LEX 278 26 283.52 305 26 s 180 1 18
3LEX 278 30 280.96 285 32 s 179 2 18
4LEX 278 31 280.83 285 31 s 179 7 18
DFDR:
1LEX 278 15 285 296 12 s 179 5 18
2LEX 278 24 282.67 296 14 s 179 5 18
3LEX 278 24 281.76 285 17 s 179 6 18
4LEX 278 31 280.83 285 18 s 179 14 18
SIM:
1LEX 278 52 278 278 20 m 179 47 17
2LEX 278 52 278 278 20 m 179 18 18
3LEX 278 52 278 278 20 m 179 16 18
4LEX 278 51 278.13 285 20 m 179 20 18
lexicographic local search were emphasized by
‘‘bad examples’’. The lexicographic local search
proved to be superior to the ordinary local search.
This superiority was demonstrated by a worst-case
analysis and by a computational study.
p ¼ 30
vg. Worst Time Best Freq. Avg. Worst Time
.12 11 1 s 7 48 7.06 8 2 s
.03 11 1 s 7 48 7.06 8 2 s
.78 16 26 s 8 1 10.37 13 35 s
.94 14 31 s 7 1 9.16 12 40 s
.12 12 34 s 7 22 7.78 10 45 s
.69 10 40 s 7 42 7.18 8 52 s
.84 11 26 s 7 48 7.06 8 35 s
.69 10 27 s 7 48 7.06 8 33 s
.69 10 30 s 7 48 7.06 8 33 s
.67 10 33 s 7 48 7.06 8 33 s
.65 10 24 m 7 51 7 7 31 m
9 24 m 7 51 7 7 31 m
9 24 m 7 51 7 7 31 m
9 24 m 7 51 7 7 31 m
p ¼ 30
vg. Worst Time Best Freq. Avg. Worst Time
5.90 200 1 s 102 11 107.58 110 1 s
5.42 200 1 s 92 1 105.85 110 2 s
2.98 296 44 s 92 7 126.62 241 73 s
3.96 185 66 s 92 16 94.27 110 87 s
4.10 185 73 s 92 17 94.52 110 88 s
3.46 185 79 s 92 13 94.67 110 85 s
3.23 191 29 s 92 6 104.21 110 38 s
3.23 191 36 s 92 6 104.21 110 44 s
3.12 191 40 s 92 7 103.87 110 60 s
2.29 191 55 s 92 8 103.83 110 58 s
9.29 182 25 m 92 46 92.19 94 32 m
1.79 185 25 m 92 39 92.48 94 32 m
1.94 185 25 m 92 44 92.29 94 32 m
1.56 185 25 m 92 45 92.25 94 32 m

276 R. Hassin et al. / European Journal of Operational Research 151 (2003) 265–279
Appendix A
In this section we show the detailed numerical
results relating to the following instances:
Table 9
Results for BRASIL58
p ¼ 10 p ¼ 20
Best Freq. Avg. Worst Time Best Freq. A
DF 806 3 937.60 1030 1 s 455 1 5
DFDR 799 1 810.07 932 2 s 446 21 4
1LEX 1000 58 1000 1000 5 s 446 14 7
2LEX 785 3 978.60 1000 15 s 439 3 5
3LEX 785 13 910.95 1000 23 s 439 3 5
4LEX 785 21 860.86 1000 30 s 439 3 4
DFDR:
1LEX 785 7 801.29 806 17 s 446 43 4
2LEX 785 7 801.29 806 17 s 446 38 4
3LEX 785 7 801.29 806 21 s 446 41 4
4LEX 785 7 801.29 806 26 s 446 38 4
SIM:
1LEX 785 58 785 785 23 m 439 44 4
2LEX 785 57 785.24 799 22 m 439 4 4
3LEX 785 24 791.45 806 22 m 446 58 4
4LEX 785 6 802.02 806 23 m 446 57 4
Table 10
Results for ST70
p ¼ 10 p ¼ 20
Best Freq. Avg. Worst Time Best Freq. A
DF 23 9 25.07 28 1 s 14 9 1
DFDR 21 15 22.84 27 1 s 13 12 1
1LEX 23 1 26.57 43 34 s 15 1 2
2LEX 20 2 23.41 28 44 s 13 10 1
3LEX 19 1 21.56 24 65 s 12 13 1
4LEX 20 31 20.99 24 70 s 12 17 1
DFDR:
1LEX 19 2 21.43 24 34 s 12 2 1
2LEX 19 4 20.63 23 42 s 12 5 1
3LEX 19 6 20.36 23 48 s 12 5 1
4LEX 19 6 20.26 23 50 s 12 5 1
SIM:
1LEX 19 28 19.60 20 44 m 12 19 1
2LEX 19 49 19.30 20 44 m 12 68 1
3LEX 19 56 19.21 21 45 m 12 55 1
4LEX 19 43 19.41 21 44 m 12 58 1
CT24: An instance with 24 nodes from [8].
FRI26: An instance with 26 nodes from [15].
CT30: An instance with 30 nodes from [9].
DANTZIG42: An instance with 42 nodes from[15].
p ¼ 30
vg. Worst Time Best Freq. Avg. Worst Time
23.57 544 1 s 262 1 284.74 300 2 s
94.81 544 1 s 260 3 276.88 287 2 s
47.78 1000 59 s 259 2 410.43 1000 104 s
76.22 1000 91 s 259 8 312.52 1000 127 s
04.93 1000 105 s 259 7 287.05 1000 125 s
67.84 1000 115 s 259 11 287.19 1000 129 s
65.69 544 55 s 259 6 265.53 287 79 s
64.74 544 68 s 259 7 265.14 287 82 s
64.28 544 68 s 259 7 264.66 287 102 s
68.98 544 68 s 259 7 264.66 287 90 s
41 455 29 m 259 40 259.31 260 36 m
45.67 455 28 m 259 47 259.29 262 35 m
46 446 28 m 259 53 259.16 262 35 m
46.16 455 28 m 259 56 259.03 260 35 m
p ¼ 30
vg. Worst Time Best Freq. Avg. Worst Time
5.77 18 2 s 9 4 10.14 11 2 s
5.11 18 2 s 9 16 9.94 11 2 s
0.87 33 79 s 11 3 16.26 24 131 s
5.91 19 112 s 9 1 12.04 24 160 s
3.80 19 165 s 9 10 10.60 14 182 s
2.97 19 186 s 9 41 10.07 11 221 s
3.37 16 98 s 9 25 9.76 11 123 s
3.11 14 108 s 9 31 9.64 11 135 s
3.07 14 115 s 9 32 9.63 11 139 s
3.06 14 118 s 9 32 9.63 11 143 s
2.74 14 55 m 9 40 9.49 11 73 m
2.03 13 57 m 9 70 9 9 70 m
2.21 13 57 m 9 70 9 9 70 m
2.17 13 56 m 9 70 9 9 71 m
R. Hassin et al. / European Journal of Operational Research 151 (2003) 265–279 277
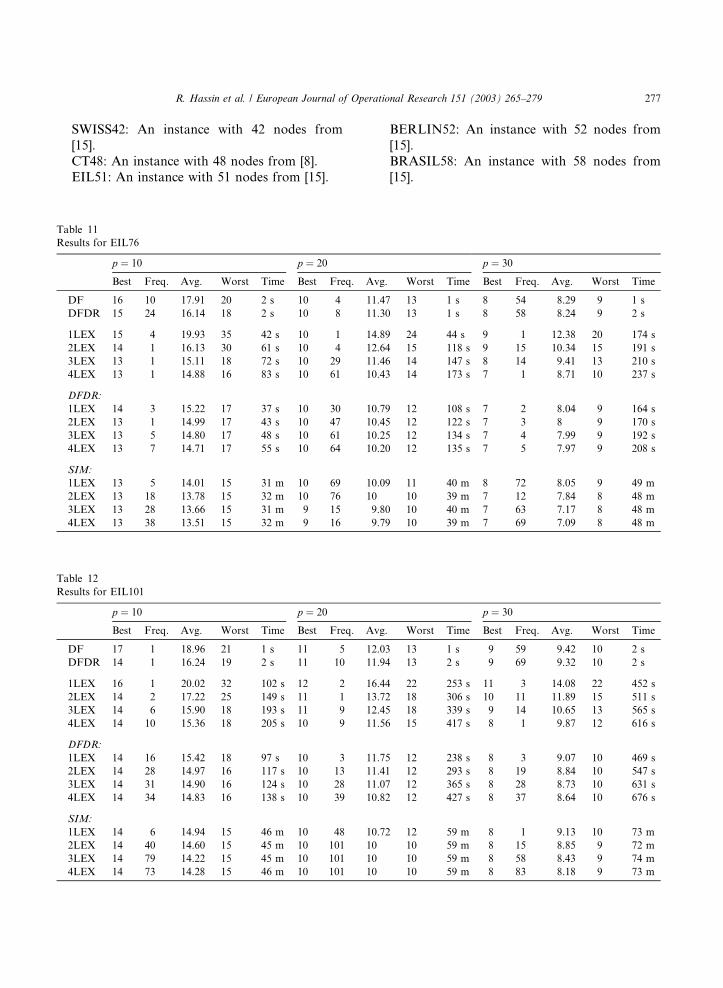
SWISS42: An instance with 42 nodes from
[15].
CT48: An instance with 48 nodes from [8].
EIL51: An instance with 51 nodes from [15].
Table 11
Results for EIL76
p ¼ 10 p ¼ 20
Best Freq. Avg. Worst Time Best Freq. A
DF 16 10 17.91 20 2 s 10 4 1
DFDR 15 24 16.14 18 2 s 10 8 1
1LEX 15 4 19.93 35 42 s 10 1 1
2LEX 14 1 16.13 30 61 s 10 4 1
3LEX 13 1 15.11 18 72 s 10 29 1
4LEX 13 1 14.88 16 83 s 10 61 1
DFDR:
1LEX 14 3 15.22 17 37 s 10 30 1
2LEX 13 1 14.99 17 43 s 10 47 1
3LEX 13 5 14.80 17 48 s 10 61 1
4LEX 13 7 14.71 17 55 s 10 64 1
SIM:
1LEX 13 5 14.01 15 31 m 10 69 1
2LEX 13 18 13.78 15 32 m 10 76 1
3LEX 13 28 13.66 15 31 m 9 15
4LEX 13 38 13.51 15 32 m 9 16
Table 12
Results for EIL101
p ¼ 10 p ¼ 20
Best Freq. Avg. Worst Time Best Freq. A
DF 17 1 18.96 21 1 s 11 5 1
DFDR 14 1 16.24 19 2 s 11 10 1
1LEX 16 1 20.02 32 102 s 12 2 1
2LEX 14 2 17.22 25 149 s 11 1 1
3LEX 14 6 15.90 18 193 s 11 9 1
4LEX 14 10 15.36 18 205 s 10 9 1
DFDR:
1LEX 14 16 15.42 18 97 s 10 3 1
2LEX 14 28 14.97 16 117 s 10 13 1
3LEX 14 31 14.90 16 124 s 10 28 1
4LEX 14 34 14.83 16 138 s 10 39 1
SIM:
1LEX 14 6 14.94 15 46 m 10 48 1
2LEX 14 40 14.60 15 45 m 10 101 1
3LEX 14 79 14.22 15 45 m 10 101 1
4LEX 14 73 14.28 15 46 m 10 101 1
BERLIN52: An instance with 52 nodes from
[15].
BRASIL58: An instance with 58 nodes from
[15].
p ¼ 30
vg. Worst Time Best Freq. Avg. Worst Time
1.47 13 1 s 8 54 8.29 9 1 s
1.30 13 1 s 8 58 8.24 9 2 s
4.89 24 44 s 9 1 12.38 20 174 s
2.64 15 118 s 9 15 10.34 15 191 s
1.46 14 147 s 8 14 9.41 13 210 s
0.43 14 173 s 7 1 8.71 10 237 s
0.79 12 108 s 7 2 8.04 9 164 s
0.45 12 122 s 7 3 8 9 170 s
0.25 12 134 s 7 4 7.99 9 192 s
0.20 12 135 s 7 5 7.97 9 208 s
0.09 11 40 m 8 72 8.05 9 49 m
0 10 39 m 7 12 7.84 8 48 m
9.80 10 40 m 7 63 7.17 8 48 m
9.79 10 39 m 7 69 7.09 8 48 m
p ¼ 30
vg. Worst Time Best Freq. Avg. Worst Time
2.03 13 1 s 9 59 9.42 10 2 s
1.94 13 2 s 9 69 9.32 10 2 s
6.44 22 253 s 11 3 14.08 22 452 s
3.72 18 306 s 10 11 11.89 15 511 s
2.45 18 339 s 9 14 10.65 13 565 s
1.56 15 417 s 8 1 9.87 12 616 s
1.75 12 238 s 8 3 9.07 10 469 s
1.41 12 293 s 8 19 8.84 10 547 s
1.07 12 365 s 8 28 8.73 10 631 s
0.82 12 427 s 8 37 8.64 10 676 s
0.72 12 59 m 8 1 9.13 10 73 m
0 10 59 m 8 15 8.85 9 72 m
0 10 59 m 8 58 8.43 9 74 m
0 10 59 m 8 83 8.18 9 73 m
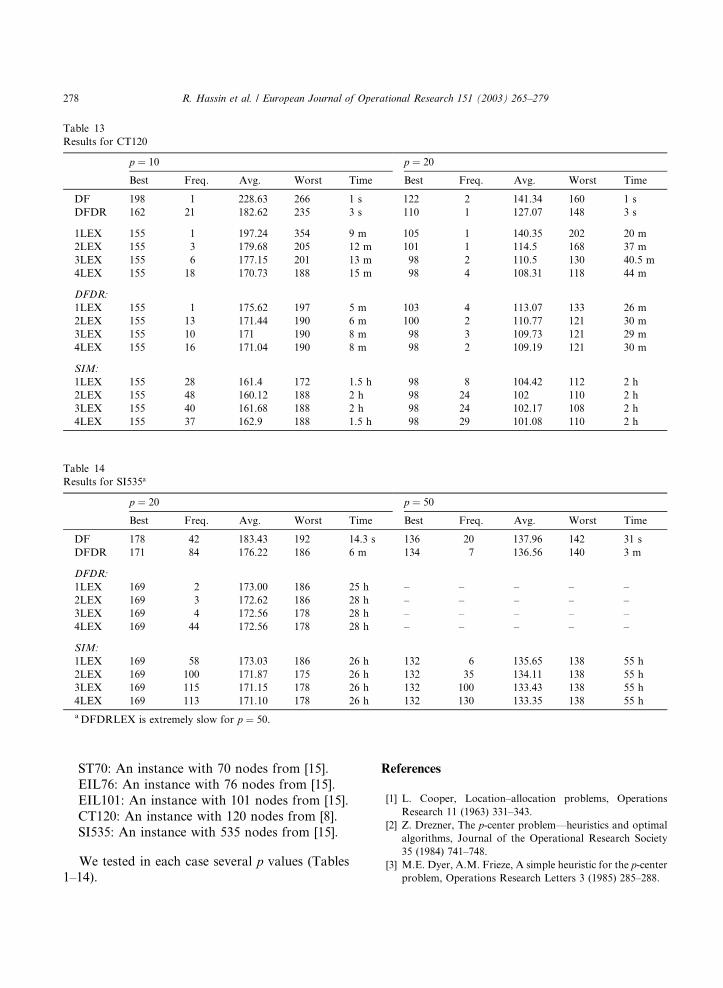
Table 13
Results for CT120
p ¼ 10 p ¼ 20
Best Freq. Avg. Worst Time Best Freq. Avg. Worst Time
DF 198 1 228.63 266 1 s 122 2 141.34 160 1 s
DFDR 162 21 182.62 235 3 s 110 1 127.07 148 3 s
1LEX 155 1 197.24 354 9 m 105 1 140.35 202 20 m
2LEX 155 3 179.68 205 12 m 101 1 114.5 168 37 m
3LEX 155 6 177.15 201 13 m 98 2 110.5 130 40.5 m
4LEX 155 18 170.73 188 15 m 98 4 108.31 118 44 m
DFDR:
1LEX 155 1 175.62 197 5 m 103 4 113.07 133 26 m
2LEX 155 13 171.44 190 6 m 100 2 110.77 121 30 m
3LEX 155 10 171 190 8 m 98 3 109.73 121 29 m
4LEX 155 16 171.04 190 8 m 98 2 109.19 121 30 m
SIM:
1LEX 155 28 161.4 172 1.5 h 98 8 104.42 112 2 h
2LEX 155 48 160.12 188 2 h 98 24 102 110 2 h
3LEX 155 40 161.68 188 2 h 98 24 102.17 108 2 h
4LEX 155 37 162.9 188 1.5 h 98 29 101.08 110 2 h
Table 14
Results for SI535a
p ¼ 20 p ¼ 50
Best Freq. Avg. Worst Time Best Freq. Avg. Worst Time
DF 178 42 183.43 192 14.3 s 136 20 137.96 142 31 s
DFDR 171 84 176.22 186 6 m 134 7 136.56 140 3 m
DFDR:
1LEX 169 2 173.00 186 25 h – – – – –
2LEX 169 3 172.62 186 28 h – – – – –
3LEX 169 4 172.56 178 28 h – – – – –
4LEX 169 44 172.56 178 28 h – – – – –
SIM:
1LEX 169 58 173.03 186 26 h 132 6 135.65 138 55 h
2LEX 169 100 171.87 175 26 h 132 35 134.11 138 55 h
3LEX 169 115 171.15 178 26 h 132 100 133.43 138 55 h
4LEX 169 113 171.10 178 26 h 132 130 133.35 138 55 h
aDFDRLEX is extremely slow for p ¼ 50.
278 R. Hassin et al. / European Journal of Operational Research 151 (2003) 265–279
ST70: An instance with 70 nodes from [15].
EIL76: An instance with 76 nodes from [15].
EIL101: An instance with 101 nodes from [15].
CT120: An instance with 120 nodes from [8].
SI535: An instance with 535 nodes from [15].
We tested in each case several p values (Tables1–14).
References
[1] L. Cooper, Location–allocation problems, Operations
Research 11 (1963) 331–343.
[2] Z. Drezner, The p-center problem––heuristics and optimal
algorithms, Journal of the Operational Research Society
35 (1984) 741–748.
[3] M.E. Dyer, A.M. Frieze, A simple heuristic for the p-centerproblem, Operations Research Letters 3 (1985) 285–288.

R. Hassin et al. / European Journal of Operational Research 151 (2003) 265–279 279
[4] R.J. Fowler, M.S. Paterson, S.L. Tanimoto, Optimal
packing and covering in the plane are NP-complete,
Information Processing Letters 12 (1987) 133–137.
[5] M. F€uurer, B. Raghavachari, Approximating the minimum
degree spanning tree to within one from the optimal
degree, in: Proceedings of the Third Annual ACM-SIAM
Symposium on Discrete Algorithms, 1992.
[6] M. F€uurer, B. Raghavachari, Approximating the minimum
degree Steiner tree to within one of optimal, Journal of
Algorithms 17 (1994) 409–423.
[7] C.A. Glass, C.N. Potts, P. Shade, Unrelated parallel
machine scheduling using local search, Mathematical and
Computer Modeling 20 (1994) 41–52.
[8] M. Gr€ootschel, O. Holland, Solution of large-scale sym-
metric travelling salesman problems, Mathematical Pro-
gramming 51 (1991) 141–202.
[9] G.Y. Handler, P. Mirchandani, Location on Networks,
Theory and Algorithms, M.I.T. Press, Cambridge, MA,
1979.
[10] D.S. Hochbaum, D.B. Shmoys, A best possible heuristic
for the k-center problem, Mathematics of Operations
Research 10 (1985) 180–184.
[11] D.S. Hochbaum, D.B. Shmoys, A unified approach to
approximation algorithms for bottleneck problems, Jour-
nal of the Association for Computing Machinery 33 (1986)
533–550.
[12] S. Khanna, R. Motwani, M. Sudan, U. Vazirani, On
syntactic versus computational views of approxima-
bility, in: Proceedings of the 35th Annual IEEE Sym-
posium on Foundations of Computer Science, 1994,
pp. 819–830.
[13] J. Plesn�ıık, A heuristic for the p-center problem in graphs,
Discrete Applied Mathematics 17 (1987) 263–268.
[14] J. Plesn�ıık, On the interchange heuristic for locating centers
and medians in a graph, Mathematica Slovaca 37 (1987)
209–216.
[15] G. Reinelt, TSPLIB. Available from <ftp://elib.zib-ber-
lin.de/pub/mp-testdata/tsp/index.html>.