lecture6 positive definite matrices - national chiao tung...
TRANSCRIPT

Linear Algebra
Lecture 6PositiveDefiniteMatrices
Prof. Chun-Hung Liu
2017/6/8 Lecture6:PositiveDefiniteMatrices 1
Dept. of Electrical and Computer EngineeringNational Chiao Tung University
Spring 2017

2017/6/8 Lecture6:PositiveDefiniteMatrices 2
Outline
• Minima, Maxima, and Saddle Points
• Tests for Positive Definiteness
• Singular Value Decomposition
(The materials of this lecture are based on Chapter 6 of Strang’s Book)

2017/6/8 Lecture6:PositiveDefiniteMatrices 3
Minima, Maxima, and Saddle Points• The signs of the eigenvalues are often crucial. For stability in differential
equations, we needed negative eigenvalues so that would decay.e�t
• The new and highly important problem is to recognize a minimum point.Here are two examples:
Does either or have a minimum at the point ?F (x, y) f(x, y) x = y = 0
Remark 1. The zero-order terms and have no effect on the answer. They simply raise or lower the graphs of F and f .
F (0, 0) = 7 f(0, 0) = 0
Remark 2. The linear terms give a necessary condition: To have any chance of a minimum, the first derivatives must vanish at :x = y = 0

2017/6/8 Lecture6:PositiveDefiniteMatrices 4
Thus is a stationary point for both functions.
Remark 3. The second derivatives at (0,0) are decisive:
These second derivatives 4, 4, 2 contain the answer. Since they are the same for F and f, they must contain the same answer. F has a minimum if and only if f has a minimum.
Minima, Maxima, and Saddle Points
(x, y) = (0, 0)

2017/6/8 Lecture6:PositiveDefiniteMatrices 5
Minima, Maxima, and Saddle PointsRemark 4. The higher-degree terms in F have no effect on the question of a local minimum, but they can prevent it from being a global minimum.
• Every quadratic form has a stationary point at the origin, where . A local minimum would also be a global minimum, the surface will then be shaped like a bowl, resting on the origin (Figure 6.1).
f = ax
2 + 2bxy + cy
2
@f/@x = @f/@y = 0z = f(x, y)

2017/6/8 Lecture6:PositiveDefiniteMatrices 6
Minima, Maxima, and Saddle Points• If the stationary point of F is at , the only change would
be to use the second derivatives at :x = ↵, y = �
↵,�
This behaves near (0,0) in the same way that behaves near .
f(x, y)F (x, y)
(↵,�)
• The third derivatives are drawn into the problem when the second derivatives fail to give a definite decision. That happens when the quadratic part is singular.
• For a true minimum, f is allowed to vanish only at . When is strictly positive at all other points (the bowl goes up), it is called
positive definite.
x = y = 0f(x, y)

2017/6/8 Lecture6:PositiveDefiniteMatrices 7
Minima, Maxima, and Saddle Points• Definite versus Indefinite: Bowl versus Saddle
What conditions on a, b, and c ensure that the quadratic is positive definite? One necessary condition
is easy:f(x, y) = ax
2 + 2bxy + cy
2
(i) If is positive definite, then necessarily .ax
2 + 2bxy + cy
2 a > 0
(ii) If is positive definite, then necessarily .f(x, y) c > 0
2017/6/8 Lecture6:PositiveDefiniteMatrices 8
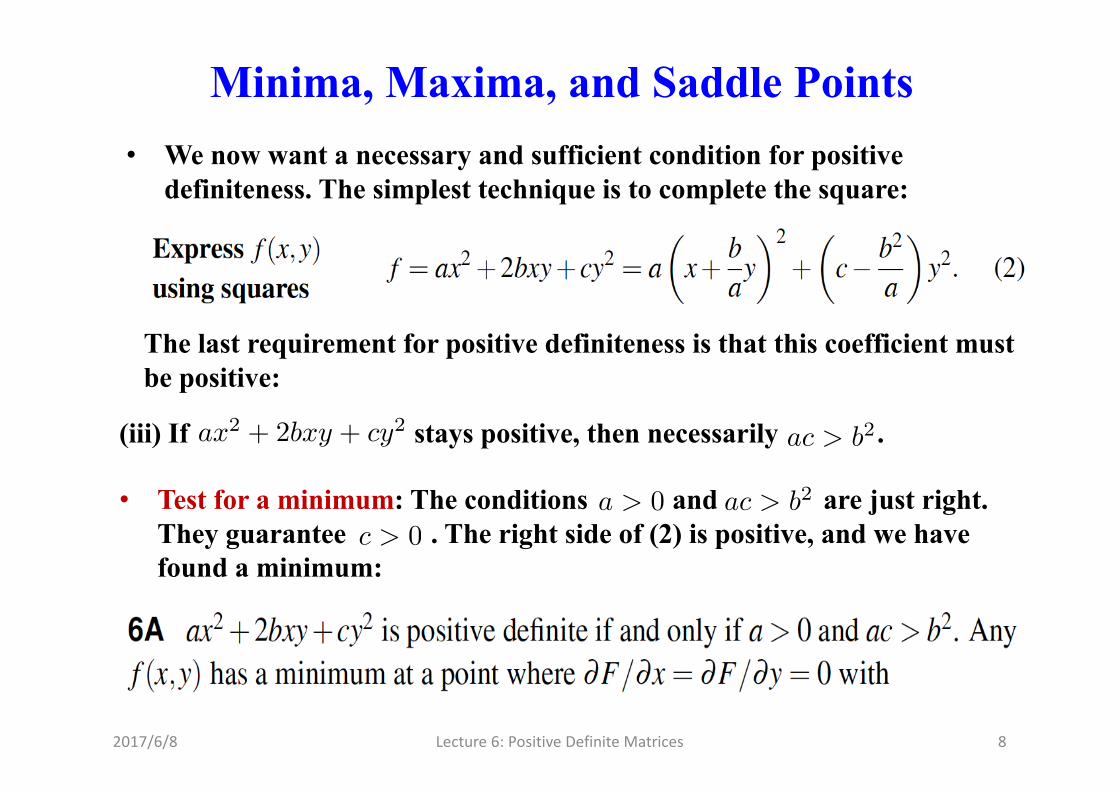
Minima, Maxima, and Saddle Points• We now want a necessary and sufficient condition for positive
definiteness. The simplest technique is to complete the square:
The last requirement for positive definiteness is that this coefficient must be positive:
(iii) If stays positive, then necessarily .ax
2 + 2bxy + cy
2 ac > b2
• Test for a minimum: The conditions and are just right. They guarantee . The right side of (2) is positive, and we have found a minimum:
a > 0 ac > b2
c > 0
2017/6/8 Lecture6:PositiveDefiniteMatrices 9
Minima, Maxima, and Saddle Points
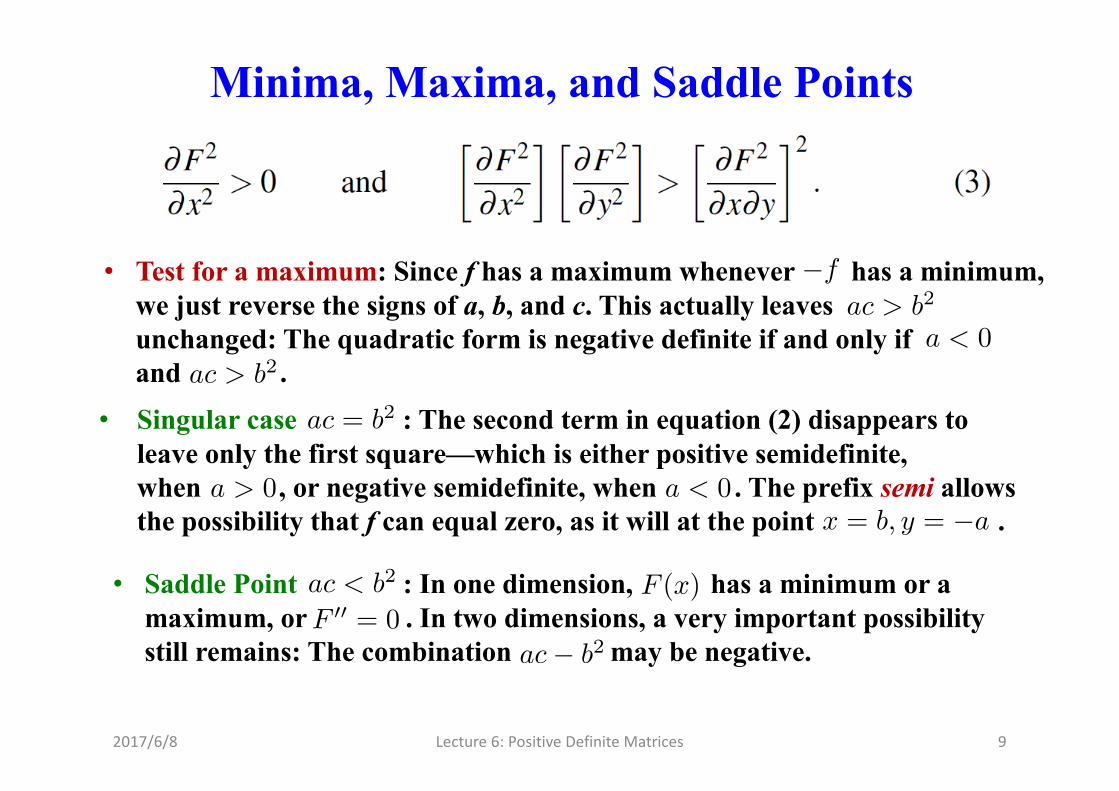
• Test for a maximum: Since f has a maximum whenever has a minimum, we just reverse the signs of a, b, and c. This actually leaves unchanged: The quadratic form is negative definite if and only if and .
ac > b2
a < 0ac > b2
�f
• Singular case : The second term in equation (2) disappears to leave only the first square—which is either positive semidefinite, when , or negative semidefinite, when . The prefix semi allows the possibility that f can equal zero, as it will at the point .
ac = b2
a > 0 a < 0x = b, y = �a
• Saddle Point : In one dimension, has a minimum or a maximum, or . In two dimensions, a very important possibility still remains: The combination may be negative.
ac < b2
F 00 = 0F (x)
ac� b2

2017/6/8 Lecture6:PositiveDefiniteMatrices 10
Minima, Maxima, and Saddle Points• It is useful to consider two special cases:
In the first, b=1 dominates a=c=0. In the second, a=1 and c=-1 have opposite sign. The saddles and are practically the same.2xy x
2 � y
2
• These quadratic forms are indefinite, because they can take either sign. So we have a stationary point that is neither a maximum or a minimum. It is called a saddle point.
• Higher Dimensions: Linear Algebra
A quadratic comes directly from a symmetric 2 by 2 matrix:f(x, y)

2017/6/8 Lecture6:PositiveDefiniteMatrices 11
Minima, Maxima, and Saddle Points
• For any symmetric matrix A, the product is a pure quadratic form :
x
TAx
f(x1, . . . , xn)
The function is zero at , and its first derivatives are zero. The tangent is flat; this is a stationary point. We have to decide if is a minimum or a maximum or a saddle point of the function .
x = (0, . . . , 0)x = 0
f = x
TAx

2017/6/8 Lecture6:PositiveDefiniteMatrices 12
Minima, Maxima, and Saddle Points
• At a stationary point all first derivatives are zero. • A is the “second derivative matrix” with entries .
This automatically equals , so A is symmetric. • Then F has a minimum when the pure quadratic is positive
definite. These second-order terms control F near the stationary point:
aij = @
2F/@xi@xj
aji = @
2F/@xj@xi
x
TAx
At a stationary point, grad is a vector of zeros.
F = (@F/@x1, . . . , @F/@xn)

2017/6/8 Lecture6:PositiveDefiniteMatrices 13
Tests for Positive Definiteness• Which symmetric matrices have the property that for all
nonzero vectors x? The previous section began with some hints about the signs of eigenvalues. But that gave place to the tests on a, b, c:
x
TAx > 0
From those conditions, both eigenvalues are positive. Their product is determinant , so the eigenvalues are either both positive or both negative. They must be positive because their sum is the trace .
�1�2
ac� b2 > 0a+ c > 0
• Looking at a and , it is even possible to spot the appearance of the pivots:
ac� b2
Those coefficients a and are the pivots for a 2 by 2 matrix.(ac� b2)/a
A=

2017/6/8 Lecture6:PositiveDefiniteMatrices 14
Tests for Positive Definiteness• For larger matrices the pivots still give a simple test for positive
definiteness: stays positive when n independent squares are multiplied by positive pivots.
x
TAx
• The natural generalization will involve all n of the upper left submatrices of A:
• Here is the main theorem on positive definiteness

2017/6/8 Lecture6:PositiveDefiniteMatrices 15
Tests for Positive DefinitenessProof. Condition I defines a positive definite matrix. Our first step shows that each eigenvalue will be positive:
A positive definite matrix has positive eigenvalues, since .x
TAx > 0
If all , we have to prove for every vector x (not just the eigenvectors). Since symmetric matrices have a full set of orthonormal eigenvectors, any x is a combination . Then
�i > 0x
TAx > 0
c1x1 + · · ·+ cnxn
Because of the orthogonality , and the normalization ,x
Ti xj = 0 x
Ti xi = 0
If every , then equation (2) shows that . Thus condition II implies condition I.
x
TAx > 0�i > 0

2017/6/8 Lecture6:PositiveDefiniteMatrices 16
Tests for Positive DefinitenessIf condition I holds, so does condition III: The determinant of A is the product of the eigenvalues. The trick is to look at all nonzero vectors whose last n-k components are zero:
Thus is positive definite. Its eigenvalues must be positive. Its determinant is their product, so all upper left determinants are positive.
Ak
If condition III holds, so does condition IV: If the determinants are all positive, so are the pivots.
If condition IV holds, so does condition I: We are given positive pivots, and must deduce that .
x
TAx > 0

2017/6/8 Lecture6:PositiveDefiniteMatrices 17
Those positive pivots in D multiply perfect squares to make positive. Thus condition IV implies condition I.
x
TAx
Tests for Positive Definiteness

2017/6/8 Lecture6:PositiveDefiniteMatrices 18
Tests for Positive Definiteness• Positive Definite Matrices and Least Squares: The rectangular matrix
will be R and the least-squares problem will be . It has mequations with (square systems are included). The least-square choice is the solution of .
Rx = b
m � nbx R
TRbx = R
Tb
• That matrix is not only symmetric but positive definite provided that the n columns of R are linearly independent:
The key is to recognize as . This squared length is positive (unless x = 0), because R has independent columns. (If x is nonzero then Rx is nonzero.). Thus and is positive definite.
x
TAx x
TR
TRx = (Rx)T (Rx)
kRxk2x
TR
TRx > 0 RTR
A = RTR

2017/6/8 Lecture6:PositiveDefiniteMatrices 19
Tests for Positive Definiteness• It remains to find an R for which .A = RTR
This Cholesky decomposition has the pivots split evenly between L and .LT
A third possibility is , the symmetric positive definite square root of A.
R = Qp⇤QT

2017/6/8 Lecture6:PositiveDefiniteMatrices 20
Tests for Positive Definiteness• Semidefinite Matrices:
The diagonalization leads to . If Ahas rank r, there are r nonzero ’s and r perfect squares in
A = Q⇤QTx
TAx = x
TQ⇤QT
x = y
T⇤y�
yT⇤y = �1y21 + · · ·+ �ry2r

2017/6/8 Lecture6:PositiveDefiniteMatrices 21
Tests for Positive Definiteness

2017/6/8 Lecture6:PositiveDefiniteMatrices 22
Tests for Positive Definiteness• Ellipsoids in n Dimensions
The equation to consider is . If A is the identity matrix, this simplifies to . This is the equation of the “unit sphere” in . If , the sphere gets smaller. The equation changes to .
x
TAx = 1
x
21 + x
22 + · · ·+ x
2n = 1
Rn A = 4I4x2
1 + · · ·+ 4x2n = 1
• The important step is to go from the identity matrix to a diagonal matrix:

2017/6/8 Lecture6:PositiveDefiniteMatrices 23
Tests for Positive Definiteness
• To locate the ellipse we compute and . The unit eigenvectors are and .
�1 = 1 �2 = 9(1,�1)/
p2 (1, 1)/
p2

2017/6/8 Lecture6:PositiveDefiniteMatrices 24
• The way to see the ellipse properly is to rewrite :x
TAx = 1
Note and are outside the squares. The eigenvectors are inside.� = 1 � = 9
• Any ellipsoid can be simplified in the same way. The key step is to diagonalize . Algebraically, the change to produces a sum of squares:
x
TAx = 1A = Q⇤QT
y = Q
Tx
The major axis has along the eigenvector with the smallest eigenvalue. The other axes are along the other eigenvectors. Their lengths are .
y1 = 1/p�1
1/p�2, . . . , 1/
p�n
Tests for Positive Definiteness
2017/6/8 Lecture6:PositiveDefiniteMatrices 25
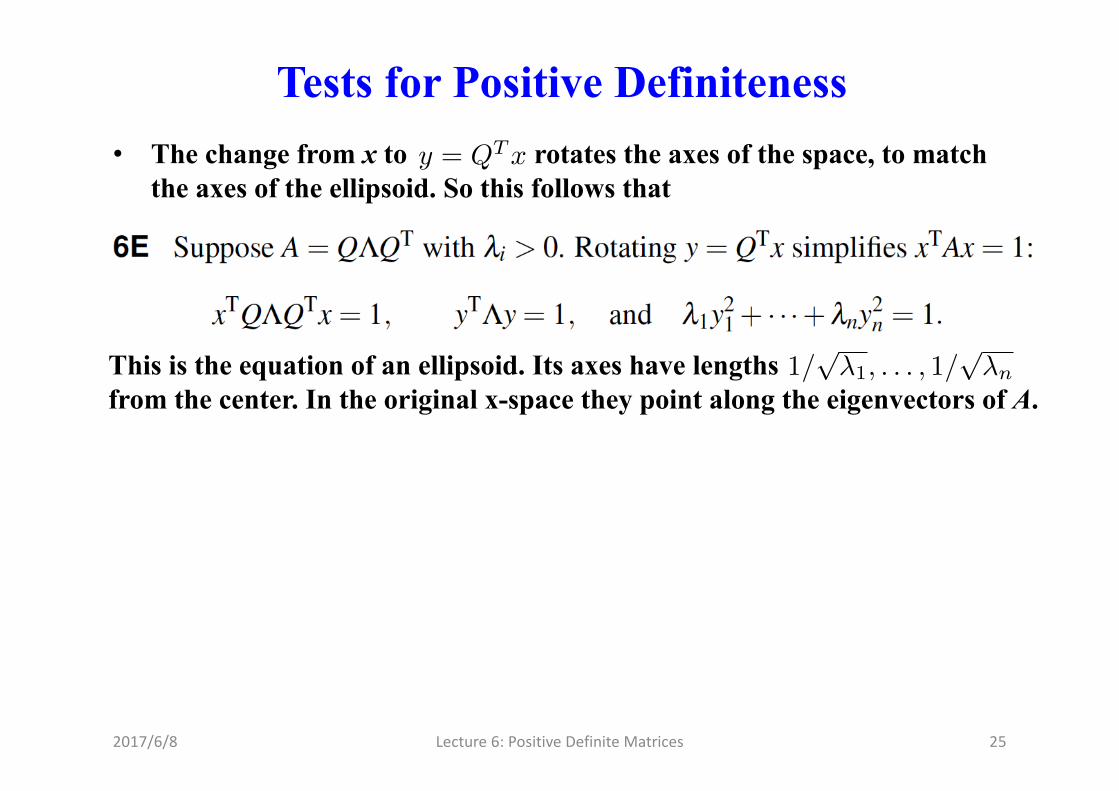
Tests for Positive Definiteness• The change from x to rotates the axes of the space, to match
the axes of the ellipsoid. So this follows thaty = Q
Tx
This is the equation of an ellipsoid. Its axes have lengths from the center. In the original x-space they point along the eigenvectors of A.
1/p�1, . . . , 1/
p�n

2017/6/8 Lecture6:PositiveDefiniteMatrices 26
• The Generalized Eigenvalue Problem: For some engineering problems, sometimes is replaced by . There are two matrices rather than one.
Tests for Positive Definiteness
Ax = �x
Ax = �Mx
• An example is the motion of two unequal masses in a line of springs:
When the masses were equal, , this was the old system . Now it is , with a mass matrix M.
m1 = m2 = 1u00 +Au = 0 Mu00 +Au = 0
• The eigenvalue problem arises when we look for exponential solutions:
e
i!tx

2017/6/8 Lecture6:PositiveDefiniteMatrices 27
Tests for Positive Definiteness
We work out with and :det(A� �M) m1 = 1 m2 = 2
• The underlying theory is easier to explain if M is split into . (M is assumed to be positive definite.) Then the substitution changes
RTRy = Rx
Writing C for , and multiplying through by , this becomes a standard eigenvalue problem for the single symmetric matrix :
R�1 (RT )�1 = CT
CTAC

2017/6/8 Lecture6:PositiveDefiniteMatrices 28
Tests for Positive Definiteness
• The properties of lead directly to the properties of , when and M is positive definite:
CTAC Ax = �Mx
A = AT
A and M are being simultaneously diagonalized. If S has the in its columns, then and .
xj
STAS = ⇤ STMS = I
• The main point is easy to summarize: As long as M is positive definite, the generalized eigenvalue problem behaves exactly like .
Ax = ��Mx Ax = �x

2017/6/8 Lecture6:PositiveDefiniteMatrices 29
Singular Value Decomposition (SVD)• The SVD is closely associated with the eigenvalue-eigenvector
factorization of a positive definite matrix.• But now we allow the Q on the left and the on the right to be any two
orthogonal matrices U and —not necessarily transposes of each other. Then every matrix will split into .
• The diagonal (but rectangular) matrix has eigenvalues from , not from A! Those positive entries (also called sigma) will be
. They are the singular values of A. They fill the first rplaces on the main diagonal of —when A has rank r. The rest of is zero.
Q⇤QT
QT
V T
A = U⌃V T
⌃ ATA
�1, . . . ,�r
⌃ ⌃
• Singular Value Decomposition: Any m by n matrix A can be factored into

2017/6/8 Lecture6:PositiveDefiniteMatrices 30
Singular Value Decomposition

2017/6/8 Lecture6:PositiveDefiniteMatrices 31
Singular Value Decomposition

2017/6/8 Lecture6:PositiveDefiniteMatrices 32
Singular Value Decomposition

2017/6/8 Lecture6:PositiveDefiniteMatrices 33
• Application of the SVD: The SVD is terrific for numerically stable computations. because U and V are orthogonal matrices. They never change the length of a vector. Since , multiplication by U cannot destroy the scaling.
Singular Value Decomposition
kUxk2 = x
TU
TUx = kxk2
• Image processing: Suppose a satellite takes a picture, and wants to send it to Earth. The picture may contain 1000 by 1000 “pixels”—a million little squares, each with a definite color. We can code the colors, and send back 1,000,000 numbers. It is better to find the essential information inside the 1000 by 1000 matrix, and send only that.• Suppose we know the SVD. The key is in the singular values (in ).
Typically, ’s are significant and others are extremely small. If we keep 20 and throw away 980, then we send only the corresponding 20 columns of U and V.
• We can do the matrix multiplication as columns times rows:
⌃�
Any matrix is the sum of r matrices of rank 1. If only 20 terms are kept, we send 20 times 2000 numbers instead of a million.

2017/6/8 Lecture6:PositiveDefiniteMatrices 34
Singular Value Decomposition• The effective rank: The rank of a matrix is the number of independent
rows, and the number of independent columns. Consider the following:
The first has rank 1, although roundoff error will probably produce a second pivot. Both pivots will be small; how many do we ignore? The second has one small pivot, but we cannot pretend that its row is insignificant. The third has two pivots and its rank is 2, but its “effective rank” ought to be 1.
We go to a more stable measure of rank. The first step is to use or , which are symmetric but share the same rank as A. Their eigenvalues—the singular values squared—are not misleading. Based on the accuracy of the data, we decide on a tolerance like and count the singular values above it—that is the effective rank.
10�6
AAT ATA

2017/6/8 Lecture6:PositiveDefiniteMatrices 35
• Polar decomposition: Every nonzero complex number z is a positive number r times a number on the unit circle: . The SVD extends this “polar factorization” to matrices of any size:
Singular Value Decomposition
ei✓ z = rei✓
For proof we just insert into the middle of the SVD:V TV = I
The factor is symmetric and semidefinite (because is). The factor is an orthogonal matrix (because ).
S = V ⌃V T ⌃Q = UV T QQT = V UTUV T = I

2017/6/8 Lecture6:PositiveDefiniteMatrices 36
Singular Value Decomposition
• Least Squares: For a rectangular system , the least-squares solution comes from the normal equations . If A has dependent columns then is not invertible and is not determined.
• We have to choose a particular solution of , and we choose the shortest.
Ax = b
A
TAbx = A
Tb
ATA bxA
TAbx = A
Tb

2017/6/8 Lecture6:PositiveDefiniteMatrices 37
Singular Value Decomposition• That minimum length solution will be called .
x
+

2017/6/8 Lecture6:PositiveDefiniteMatrices 38
Singular Value Decomposition
Based on this example, we know and for any diagonal matrix :⌃+x
+ ⌃
• Now we find in the general case. We claim that the shortest solution is always in the row space of A. Remember that any vector can be split into a row space component and a nullspace component:
x
+x
+
bxxr bx = xr + xn

2017/6/8 Lecture6:PositiveDefiniteMatrices 39
• There are three important points about that splitting:
Singular Value Decomposition
The fundamental theorem of linear algebra was in Figure 3.4. Every p in the column space comes from one and only one vector in the row space. All we are doing is to choose that vector, , as the best solution to .
xr
x
+ = xr
Ax = b

2017/6/8 Lecture6:PositiveDefiniteMatrices 40
Singular Value Decomposition

2017/6/8 Lecture6:PositiveDefiniteMatrices 41
Singular Value Decomposition
• The row space of A is the column space of . Here is a formula for :A+ A+
Proof. Multiplication by the orthogonal matrix leaves lengths unchanged:UT
Introduce the new unknown , which has the same length as x. Then, minimizing is the same as minimizing . Now is diagonal and we know the best . It is so the best is :
y = V
Tx = V
�1x
kAx� bk k⌃y � UT bk⌃ y+ y+ = ⌃+UT bx
+ V y+
is in the row space, and from the SVD.V y+ A
TAx
+ = A
Tb
+

2017/6/8 Lecture6:PositiveDefiniteMatrices 42
Minimum Principles• Our goal here is to find the minimum principle that is equivalent
to , and the minimization equivalent to .Ax = b
Ax = �b
• The first step is straightforward: We want to find the “parabola” whose minimum occurs when . If A is just a scalar, that is easy to do:
P (x)Ax = b
This point will be a minimum if A is positive. Then the parabola opens upward (Figure 6.4).
x = A
�1b
P (x)
Proof. Suppose . For any vector y, we show that :Ax = b
P (y) � P (x)

2017/6/8 Lecture6:PositiveDefiniteMatrices 43
Minimum Principles

2017/6/8 Lecture6:PositiveDefiniteMatrices 44
Minimum Principles
This can’t be negative since A is positive definite—and it is zero only if . At all other points is larger than , so the minimum occurs at x.y � x = 0 P (y)
P (x)

2017/6/8 Lecture6:PositiveDefiniteMatrices 45
Minimum Principles• Minimizing with Constraints: Many applications add extra equations
on top of the minimization problem. These equations are constraints. We minimize subject to the extra requirement .Cx = d
Cx = d
• Usually x can’t satisfy n equations and also extra constraints . So we need more unknowns.
Ax = b `Cx = d `
• Those new unknowns are called Lagrange multipliers. They build the constraint into a function . Thus, we can have
y1, . . . , y`L(x, y)
P (x)
When we set the derivatives of L to zero, we have equations for unknowns x and y:
n+ `n+ `

2017/6/8 Lecture6:PositiveDefiniteMatrices 46
Minimum Principles

2017/6/8 Lecture6:PositiveDefiniteMatrices 47
Minimum Principles
• Figure 6.5 shows what problem the linear algebra has solved, if the constraint keeps x on a line . We are looking for the closest point to (0,0) on this line. The solution is .
2x1 � x2 = 5x = (2,�1)
• Least Squares Again: The best is the vector that minimizes the squared error , i.e.,
bxE
2 = kAx� bk2
Compare with at the start of the section, which led to :12x
TAx� x
Tb
Ax = b

2017/6/8 Lecture6:PositiveDefiniteMatrices 48
Minimum Principles
• The minimizing equation changes into theAx = b

2017/6/8 Lecture6:PositiveDefiniteMatrices 49
Matrix Factorizations

2017/6/8 Lecture6:PositiveDefiniteMatrices 50
Matrix Factorizations

2017/6/8 Lecture6:PositiveDefiniteMatrices 51
Matrix Factorizations
12.