lecture «robot dynamics»: introduction · growing market and applications big investment by big...
TRANSCRIPT
||
151-0851-00 Vlecture: CAB G11 Tuesday 10:15 – 12:00, every weekexercise: HG G1 Wednesday 8:15 – 10:00, according to schedule (about every 2nd week)office hour: LEE H303 Friday 12.15 – 13.00Marco Hutter, Roland Siegwart, and Thomas Stastny
20.09.2016Robot Dynamics - Introduction 1
Lecture «Robot Dynamics»: Introduction

||
Growing market and applications Big investment by big companies
20.09.2016Robot Dynamics - Introduction 2
RoboticsThe natural evolution of automation
|| 20.09.2016Robot Dynamics - Introduction 3
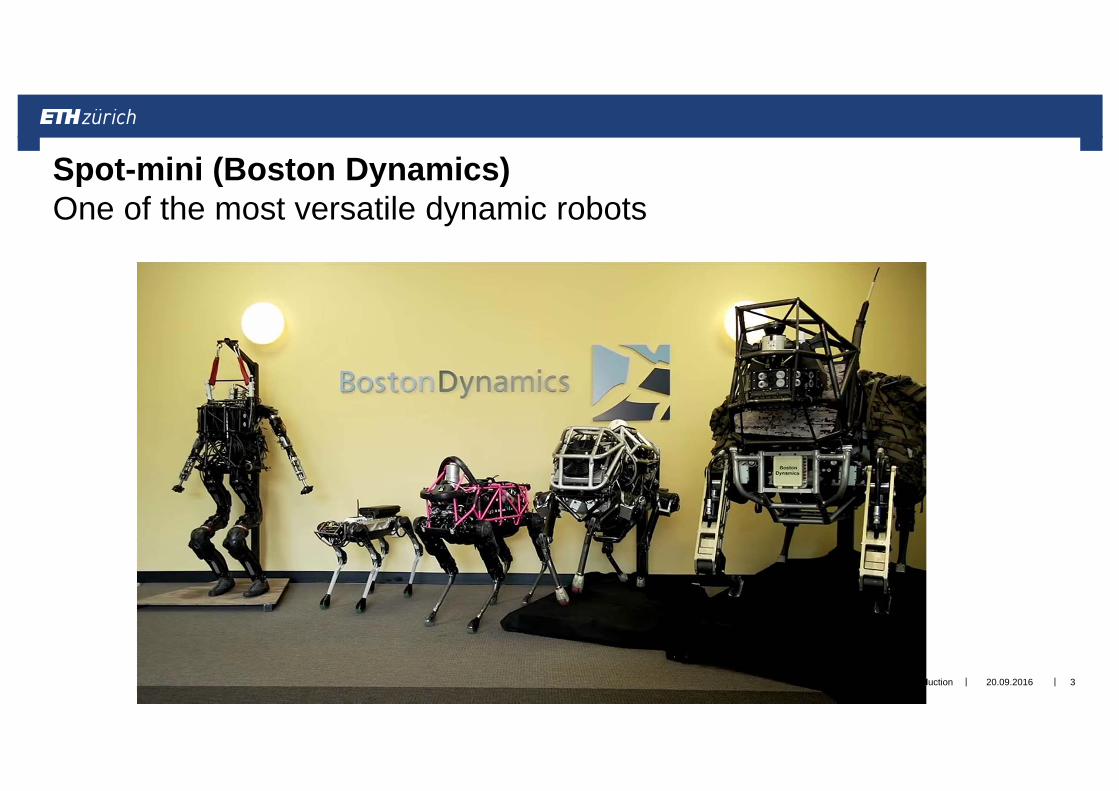
Spot-mini (Boston Dynamics)One of the most versatile dynamic robots

||
Joint position task space position
20.09.2016Robot Dynamics - Introduction 4
Kinematics, Dynamics, and Control of Quadruped + Manipulator
prBr
BPr
iq
r r q

||
Joint velocity task space velocity
20.09.2016Robot Dynamics - Introduction 5
Kinematics, Dynamics, and Control of Quadruped + Manipulator
Br
iqBv
0F v
r Jq

||
Joint torque motion / external forces
20.09.2016Robot Dynamics - Introduction 6
Kinematics, Dynamics, and Control of Quadruped + Manipulator
LiftF
icontactFicontactF
icontactFicontactF
bodyF
i
T Text ext Mq b g J F S τ

||
Design, Actuation, and Control for locomotion and interaction
20.09.2016Robot Dynamics - Introduction 7
Robotic Systems Lab
legged locomotion and autonomous navigation
digital fabrication and automated construction
actuator design for dynamic interaction
interaction control and haptic manipulation
Mobile- and telemanipulation
Robotic aggregation of irregular shaped objects

||
ANYmalan autonomous field-ready quadruped
Applications in industrial inspection and search and rescue
|| 20.09.2016Robot Dynamics - Introduction 9
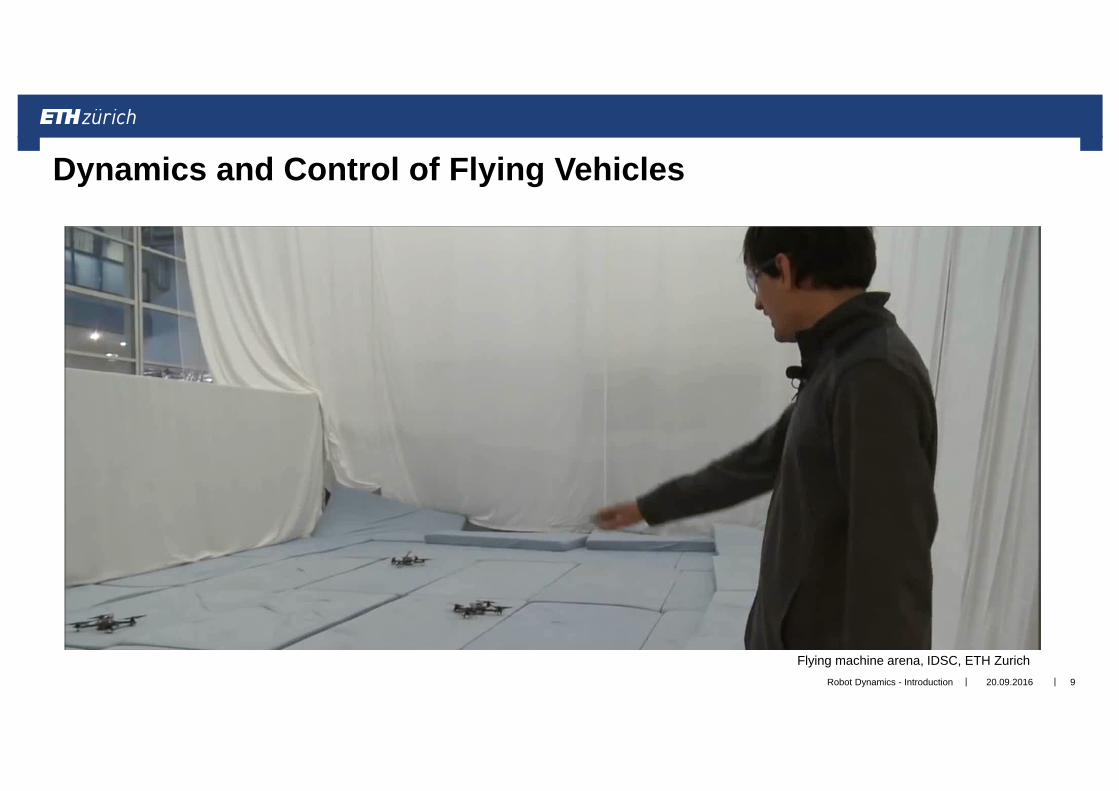
Dynamics and Control of Flying Vehicles
Flying machine arena, IDSC, ETH Zurich

||
Understanding system dynamics is essential for control
20.09.2016Robot Dynamics - Introduction 10
Dynamics of Airplane and Rotorcraft
T Text ext Mq b g J F S τ

||
UAV – inspection and aerial manipulation Solar airplane – permanent flights
20.09.2016Robot Dynamics - Introduction 11
Autonomous Systems Lab

||
Kinematic and dynamic modeling of robotic systems: Manipulators (position and force control) Legged robots Rotary wing systems Fixed wing airplanes
Objective of the course Deepening an applied understanding of how to model the most common robotic systems Extending the background in kinematics, rotations, and dynamics of multi-body systems Modeling of actuation forces Apply the models in control
Provide tools to work in the field of design and control of robotic systems
20.09.2016Robot Dynamics - Introduction 12
Robot DynamicsLecture goals
T Text ext Mq b g J F S τ

||
Topic Title20.09.2016 Intro and Outline L1 Course Introduction; Recapitulation Position, Linear Velocity, Rotation, Transformation27.09.2016 Kinematics 1 L2 Rotation and Angular Velocity; Representation; Rigid Body Formulation, 28.09.2016 Exercise 1a E1a Kinematics Modeling the ABB arm04.10.2016 Kinematics 2 L3 Kinematics of Systems of Bodies; Jacobians11.10.2016 Kinematics 3 L4 Kinematic Control Methods: Inverse Differential Kinematics, Inverse Kinematics; Rotation
Error; Multi-task Control12.10.2016 Exercise 1b E1b Kinematic Control of the ABB Arm18.10.2016 Dynamics L1 L5 Multi-body Dynamics19.10.2016 Exercise 2a E2a Dynamic Modeling of the ABB Arm25.10.2016 Dynamics L2 L6 Dynamic Model Based Control Methods26.10.2016 Exercise 2b E2b Dynamic Control Methods Applied to the ABB arm01.11.2016 Legged Robots L7 Case Study and Application of Control Methods08.11.2016 Rotorcraft 1 L8 Dynamic Modeling of Rotorcraft I15.11.2016 Rotorcraft 2 L9 Dynamic Modeling of Rotorcraft II & Control16.11.2016 Exercise 3 E3 Modeling and Control of Multicopter22.11.2016 Case Studies 2 L10 Rotor Craft Case Study29.11.2016 Fixed-wing 1 L11 Flight Dynamics; Basics of Aerodynamics; Modeling of Fixed-wing Aircraft30.11.2016 Exercise 4 E4 Aircraft Aerodynamics / Flight performance / Model derivation06.12.2016 Fixed-wing 2 L12 Stability, Control and Derivation of a Dynamic Model07.12.2016 Exercise 5 E5 Fixed-wing Control and Simulation13.12.2016 Case Studies 3 L13 Fixed-wing Case Study20.12.2016 Summery and Outlook L14 Summery; Wrap-up; Exam
20.09.2016Robot Dynamics - Introduction 13

||
Official lecture material (online on lecture homepage) Script on kinematics and dynamics (the script is new, please report mistakes!) Slides (online) [complete slides will be provided after lecture] Exercise exam
Additional readings Selected papers will be uploaded to homepage Handbook of Robotics (Siciliano, Khatib) http://link.springer.com/referencework/10.1007/978-3-540-30301-5
Robotics – Modelling, Planning and Control (Siciliano, Sciavicco, Villani, Oriolo) http://link.springer.com/book/10.1007%2F978-1-84628-642-1
20.09.2016Robot Dynamics - Introduction 14
Lecture Material
||
Lecture CAB G11 Theory Quick examples on paper
Exercise HG G1 Real problems at robotic systems (e.g. ABB industrial arm) Matlab => bring along a laptop or join a colleague
Case Studies State of the art engineering and research at selected examples Not primarily relevant in exams (only some multiple choice questions)
20.09.2016Robot Dynamics - Introduction 15
Lecture Setup

||
If things are unclear, immediately interrupt and ask(I’m happy if the lecture becomes a discussion)
Write a mail or come to office hours if things need to be further explained We try to have a short recap of all important questions at the beginning of every lecture
Small exercises during lecture: Try to solve them without help of the solution! (it helps you to understand the difficulties)
Break between hours?
20.09.2016Robot Dynamics - Introduction 16
Lecture Rules