lecture 7 : flight equations of motiondynlab.mpe.nus.edu.sg/mpelsb/me4241/l7n.pdf · lecture 7 :...
TRANSCRIPT

G. Leng, Flight Dynamics, Stability & Control
Lecture 7 : Flight Equations of Motion
Or the differential equations for a 6 DOF model
G. Leng, Flight Dynamics, Stability & Control
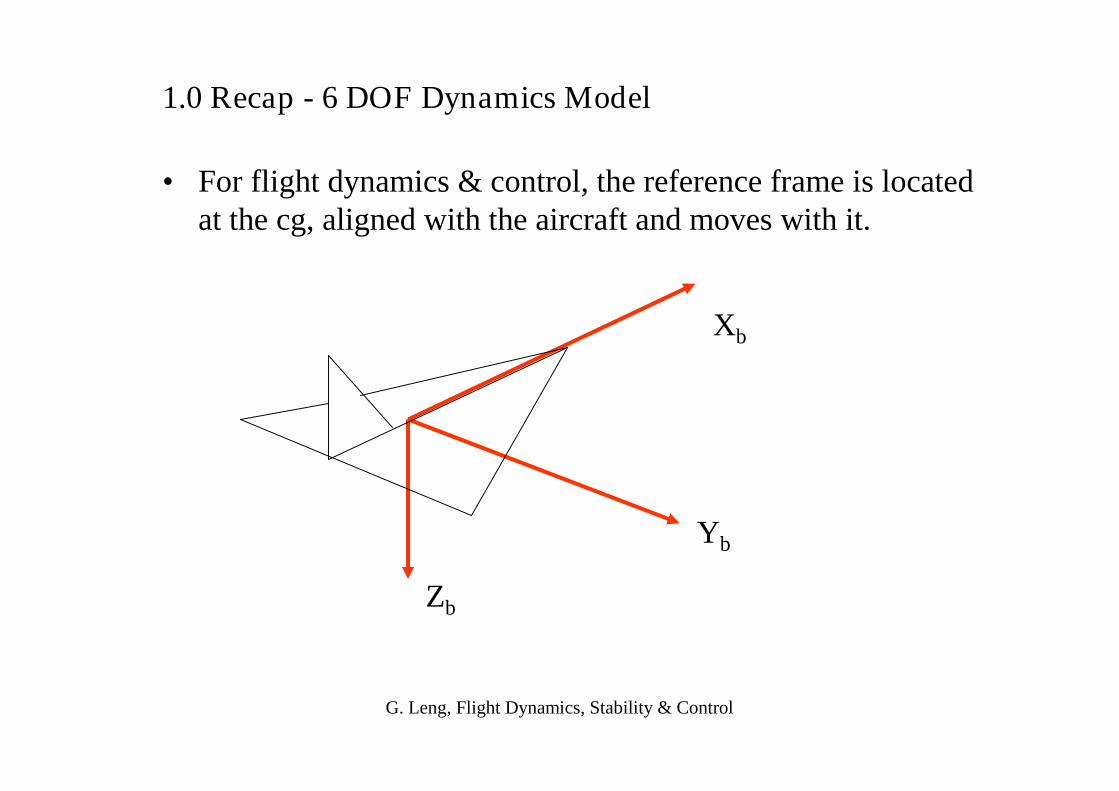
1.0 Recap - 6 DOF Dynamics Model
• For flight dynamics & control, the reference frame is locatedat the cg, aligned with the aircraft and moves with it.
Yb
Xb
Zb

G. Leng, Flight Dynamics, Stability & Control
The 6 DOFs correspond to :
• translation along the X,Y,Z directions
– velocity vector in body axes V = {u,v,w}
• rotation about the X,Y, Z axes
– angular velocity vector in body axes = {p,q,r}
Now we need to relate forces and moments to these 6 DOFs

G. Leng, Flight Dynamics, Stability & Control
• Denote the forces acting on the aircraft by F = {X,Y,Z}
– These forces act at the origin (c.g) of the reference frame
• Similarly denote the moments by Mcg = {l, m, n}
– These are the roll, pitch and yaw moments taken wrt the c.g.
Question: So how do we relate the force to the 3 translationalDOF’s ?
Answer : F = d(mV)/dt = m {u’, v’, w’} ?

G. Leng, Flight Dynamics, Stability & Control
2.0 Coriolis theorem
Coriolis Theorem states that the absolute or actual time rate ofchange of a vector r = xi + yj + zk where the reference frame ijkrotates with absolute angular velocity = pi + q j + rk is :
dr/dt = ( dx/dt i + dy/dt j + dz/dt k ) + x r
G. Leng, Flight Dynamics, Stability & Control
2.1 Translational equations of motion
The translational motion is governed by :
(mV)/t + x (mV) = F
Assuming the mass m is constant over the time interval ofinterest, this works out as ...

G. Leng, Flight Dynamics, Stability & Control
u' + q w – r v = X/m
v' + r u – p w = Y/m
w' + p v – q u = Z/m
Translational equations of motion
Note the nonlinear terms arising from the correction x (mV)

G. Leng, Flight Dynamics, Stability & Control
Notes:
We can decompose
F = Faero + T + W
i.e.
aero forces Faero = {Xaero, Yaero, Zaero}
thrust T = {Tx, TY, TZ }
weight W = Mg {-sin cos sin cos cos }

G. Leng, Flight Dynamics, Stability & Control
3.0 Angular momentum and moments
The moments acting on the aircraft may be related to the 3rotational DOFs by
dH/dt = M
where M is the moment of the forces acting on the aircraft
H is the angular momentum of the aircraft
Question : Where’s the catch ?

G. Leng, Flight Dynamics, Stability & Control
The relation holds only if both M and H are taken wrt
(a)
or
(b)
The second case holds for our reference frame.
So what’s Hcg for an aircraft ?

G. Leng, Flight Dynamics, Stability & Control
3.1 Computing the angular momentum Hcg of an aircraft
Consider a small piece of the aircraft of mass dm locatedat r = {x,y,z} wrt the body axes.
Xb
Yb
Zb
r
dm
G. Leng, Flight Dynamics, Stability & Control
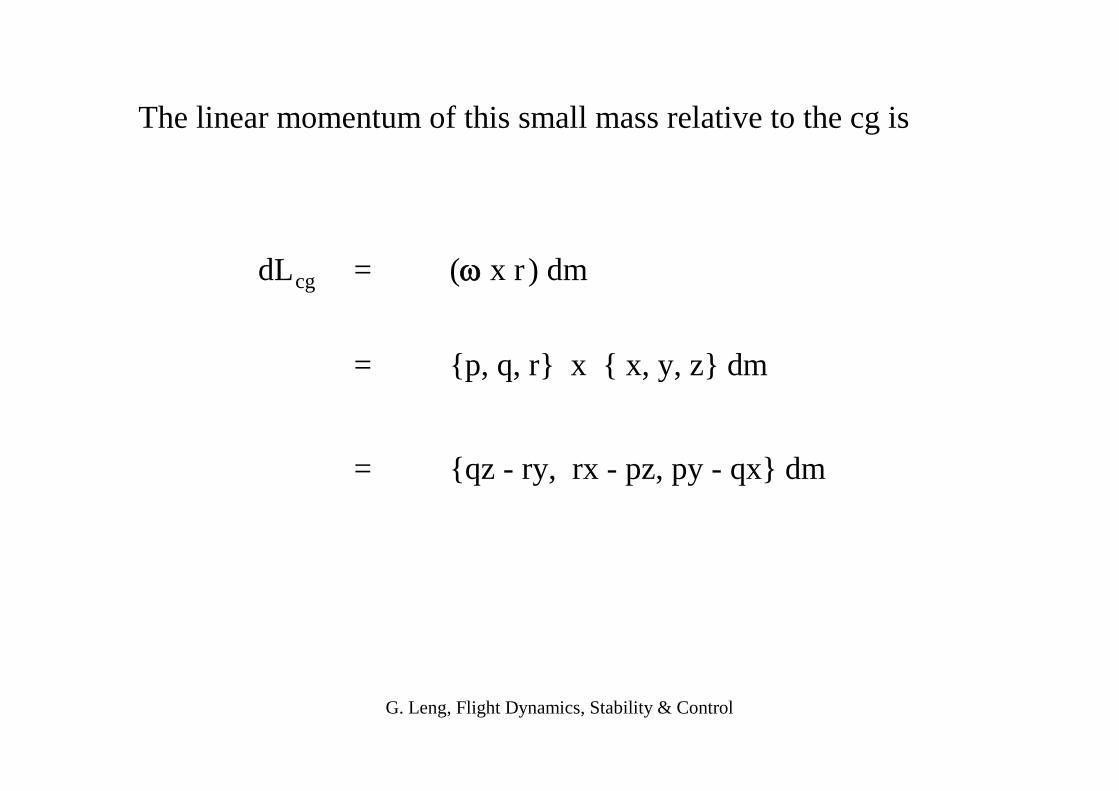
The linear momentum of this small mass relative to the cg is
= {p, q, r} x { x, y, z} dm
= {qz - ry, rx - pz, py - qx} dm
dLcg = ( x r) dm

G. Leng, Flight Dynamics, Stability & Control
The angular momentum wrt the cg of this small mass is
= r x ( x r) dm
= { x, y, z} x {qz - ry, rx - pz, py - qx} dm
dHcg = r x dLcg
Hcg = { x, y, z} x {qz - ry, rx - pz, py - qx} dm
Finally we sum over the whole aircraft
G. Leng, Flight Dynamics, Stability & Control
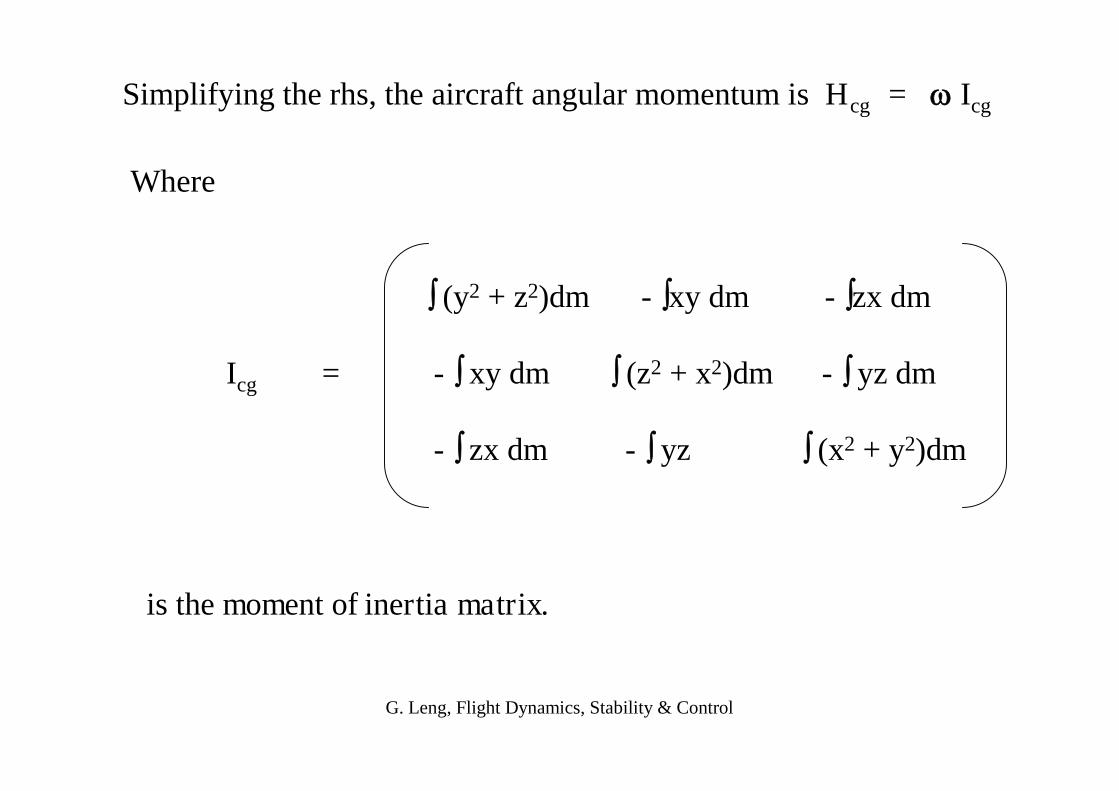
Where
(y2 + z2)dm - xy dm - zx dm
Icg = - xy dm (z2 + x2)dm - yz dm
- zx dm - yz (x2 + y2)dm
Simplifying the rhs, the aircraft angular momentum is Hcg = Icg
is the moment of inertia matrix.
G. Leng, Flight Dynamics, Stability & Control
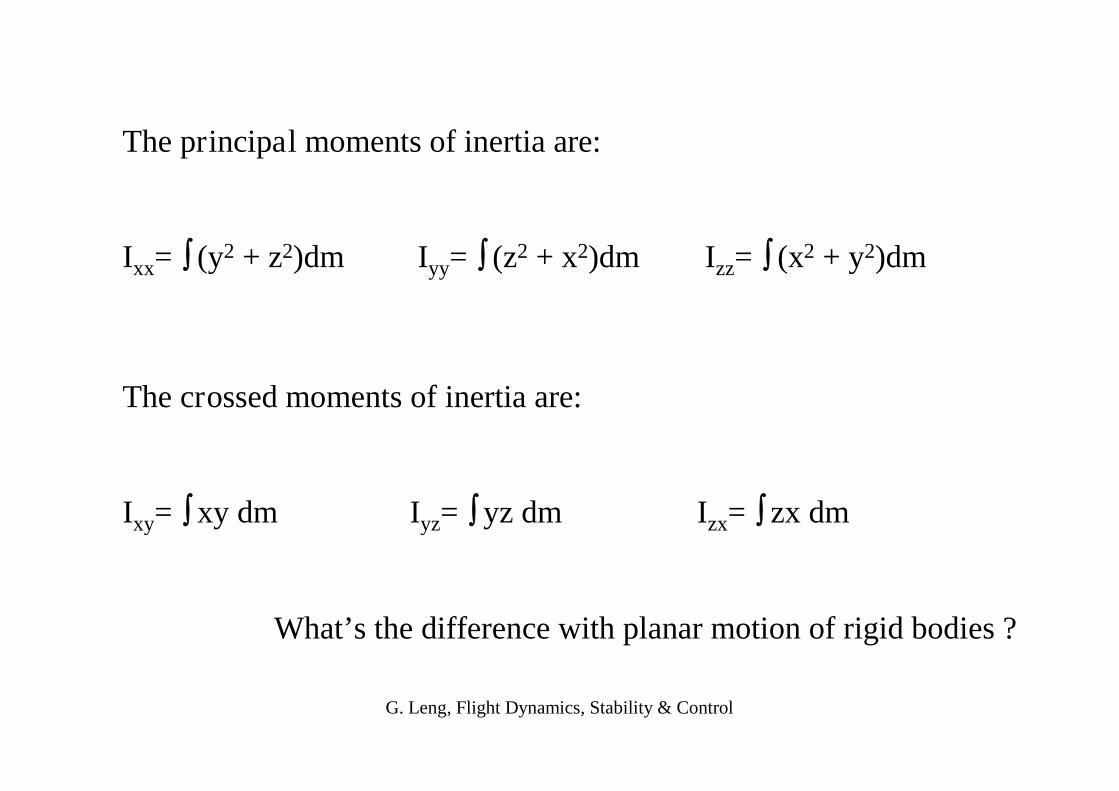
The principal moments of inertia are:
Ixx= (y2 + z2)dm Iyy= (z2 + x2)dm Izz= (x2 + y2)dm
The crossed moments of inertia are:
Ixy= xy dm Iyz= yz dm Izx= zx dm
What’s the difference with planar motion of rigid bodies ?

G. Leng, Flight Dynamics, Stability & Control
Ex : Simplifications for symmetric aircraft
Question : Which is the plane of symmetry ?

G. Leng, Flight Dynamics, Stability & Control
X
Y
Consider Ixy = xy dm
For each section along the X axis,the contribution from the left sidecancels the contribution from theright.
Ixy = 0 Is that all ?

G. Leng, Flight Dynamics, Stability & Control
Similarly for Iyz= yz dm
Z
Y
For each section along the Z axis,the contribution from the left sidecancels the contribution from theright.
Iyz = 0

G. Leng, Flight Dynamics, Stability & Control
Hence the moment of inertiamatrix simplifies to:
Ixx 0 -Ixz
Icg = 0 Iyy 0
-Ixz 0 Izz

G. Leng, Flight Dynamics, Stability & Control
3.2 Rotational equations of motion
Now apply Coriolis theorem to dHcg/dt = Mcg
where Hcg = Icg the rotational equations of motion are:
( Icg )/t + x ( Icg) = Mcg
Which simplifies ( Ixy = Iyz = 0 ) to :

G. Leng, Flight Dynamics, Stability & Control
Ixx p’ + ( Izz - Iyy ) qr - Ixz ( r’ + pq ) = l
Iyy q’ + ( Ixx - Izz ) pr - Ixz ( r2 – p2 ) = m
Izz r’ + ( Iyy - Ixx ) pq - Ixz ( p’ - qr ) = n
Assuming the XZ plane is a plane of symmetry
G. Leng, Flight Dynamics, Stability & Control
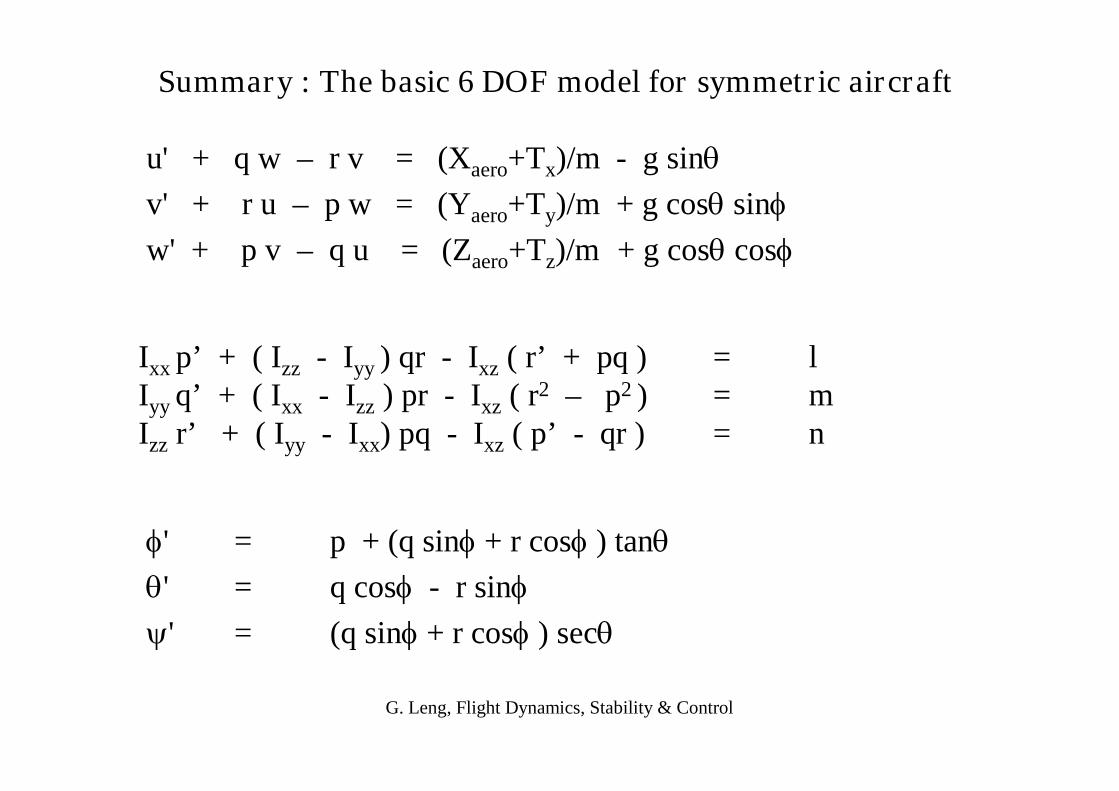
Summary : The basic 6 DOF model for symmetric aircraft
u' + q w – r v = (Xaero+Tx)/m - g sin
v' + r u – p w = (Yaero+Ty)/m + g cos sin
w' + p v – q u = (Zaero+Tz)/m + g cos cos
Ixx p’ + ( Izz - Iyy ) qr - Ixz ( r’ + pq ) = lIyy q’ + ( Ixx - Izz ) pr - Ixz ( r2 – p2 ) = mIzz r’ + ( Iyy - Ixx) pq - Ixz ( p’ - qr ) = n
' = p + (q sin + r cos ) tan
' = q cos - r sin
' = (q sin + r cos ) sec

G. Leng, Flight Dynamics, Stability & Control
Homework
Assume the thrust vector lies in theplane of symmetry, act at the c.g.with an orientation angle from theX axis as shown.
x
y
z
thrust
u = VT cos cos
v = VT sin
w = VT cos sin
Derive expressions for ’, ’ and VT’
Using the relations:

G. Leng, Flight Dynamics, Stability & Control
Answer : These are the translational EOM in flight path axes