lection 1: introduction computational geometry prof.dr.th.ottmann 1 history: proof-based,...
Post on 20-Dec-2015
240 views
TRANSCRIPT
Computational Geometry Prof.Dr.Th.Ottmann
1Lection 1:Introduction
• History: Proof-based, algorithmic, axiomatic geometry, computational geometry today
• Problem fields• An example: Computing the convex hull:
1. the “naive approach”2. Graham‘s Scan3. Lower bound
• Design, analysis, and implementation of geometrical algorithms
Lecture 1: Introduction
Computational Geometry Prof.Dr.Th.Ottmann
2Lection 1:Introduction
Problem fields
• Typical questions
• Geometrical objects: points, lines, surfaces
• Techniques
• Applications
Computational Geometry Prof.Dr.Th.Ottmann
3Lection 1:Introduction
Finding the nearest fast-food restaurant
Computational Geometry Prof.Dr.Th.Ottmann
4Lection 1:Introduction
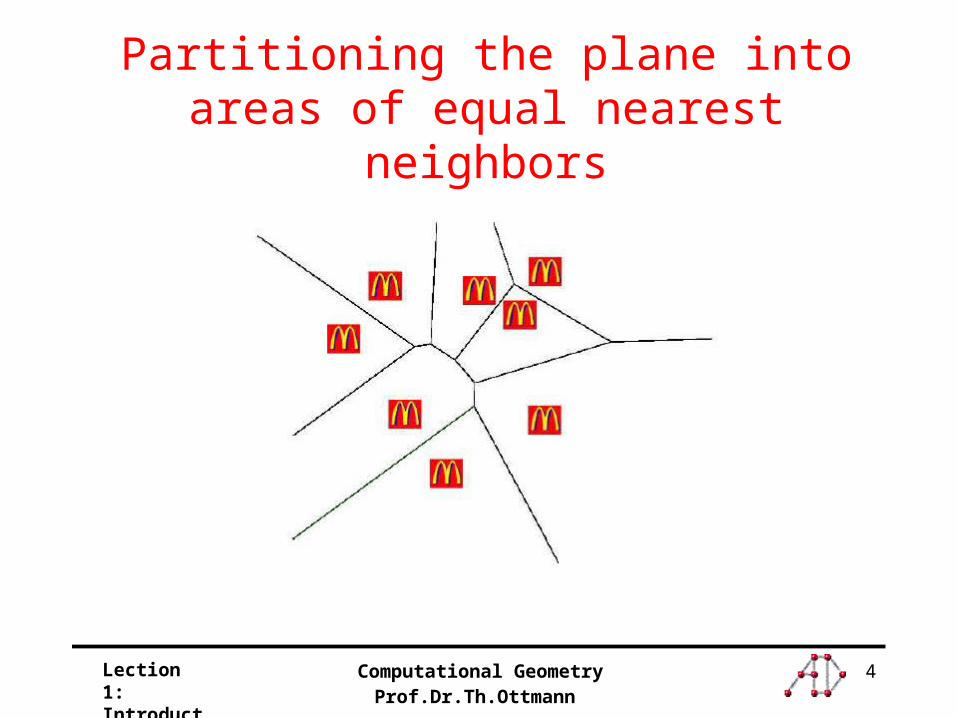
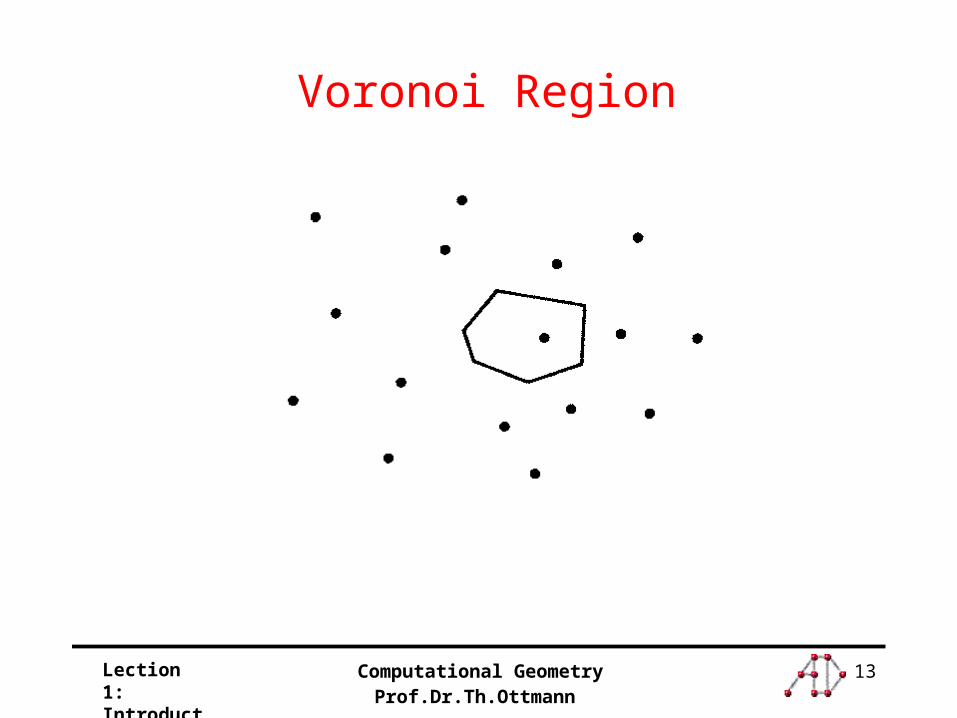
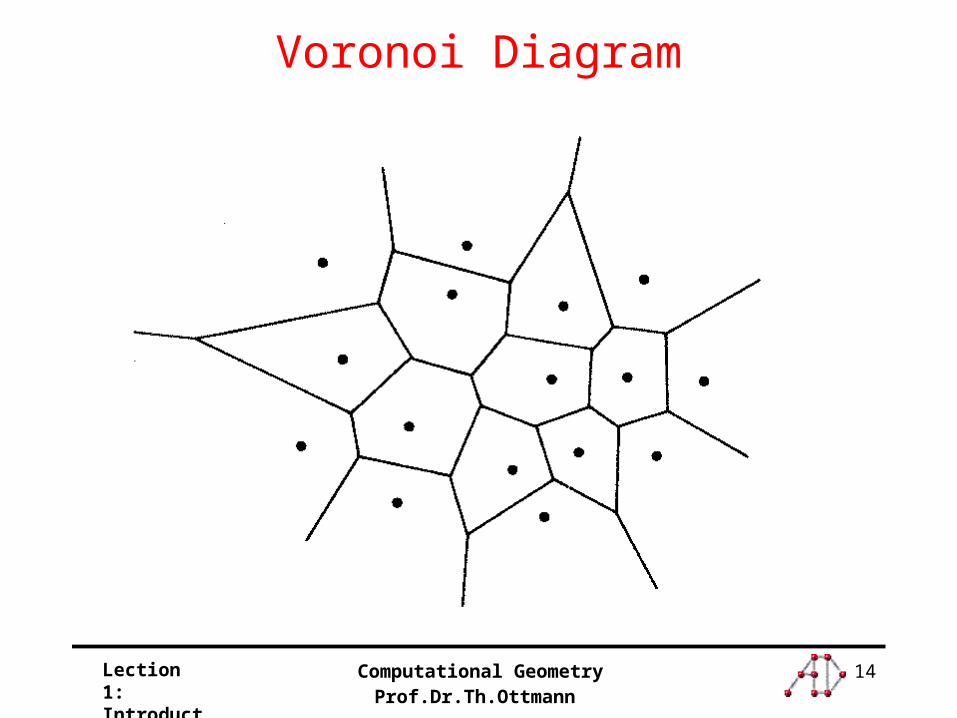
Partitioning the plane into areas of equal nearest neighbors
Computational Geometry Prof.Dr.Th.Ottmann
5Lection 1:Introduction
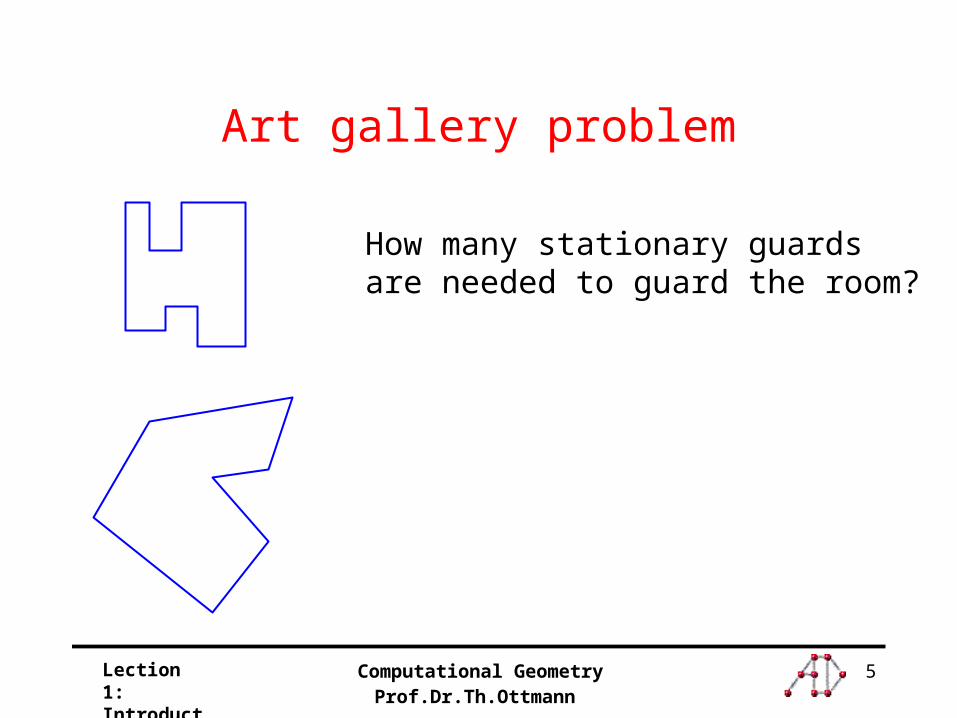
Art gallery problem
How many stationary guards are needed to guard the room?
Computational Geometry Prof.Dr.Th.Ottmann
6Lection 1:Introduction
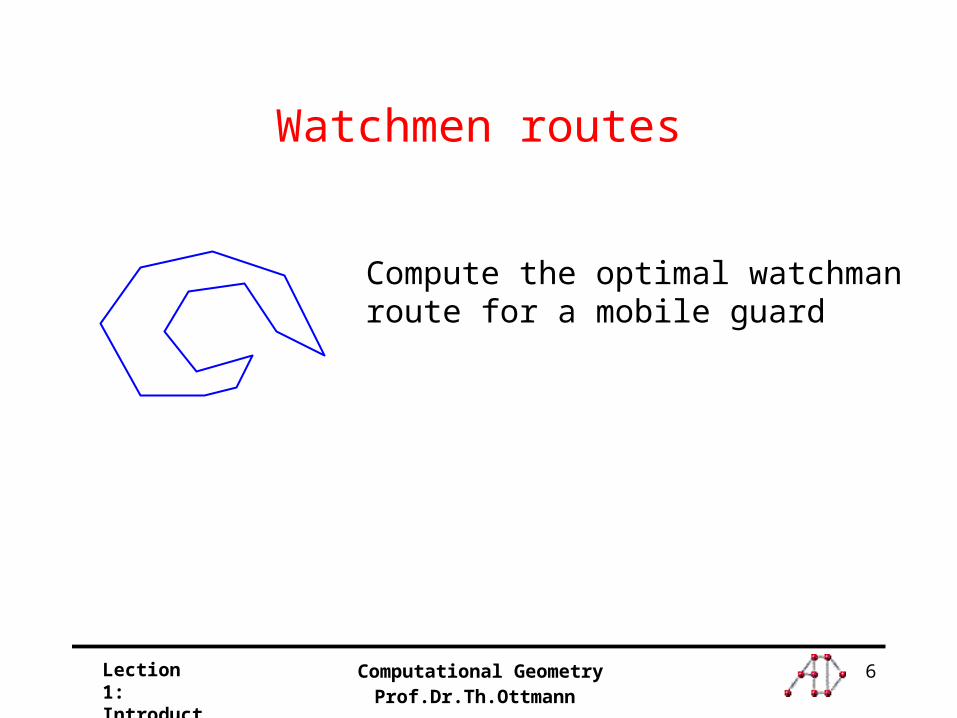
Watchmen routes
Compute the optimal watchman route for a mobile guard
Computational Geometry Prof.Dr.Th.Ottmann
7Lection 1:Introduction
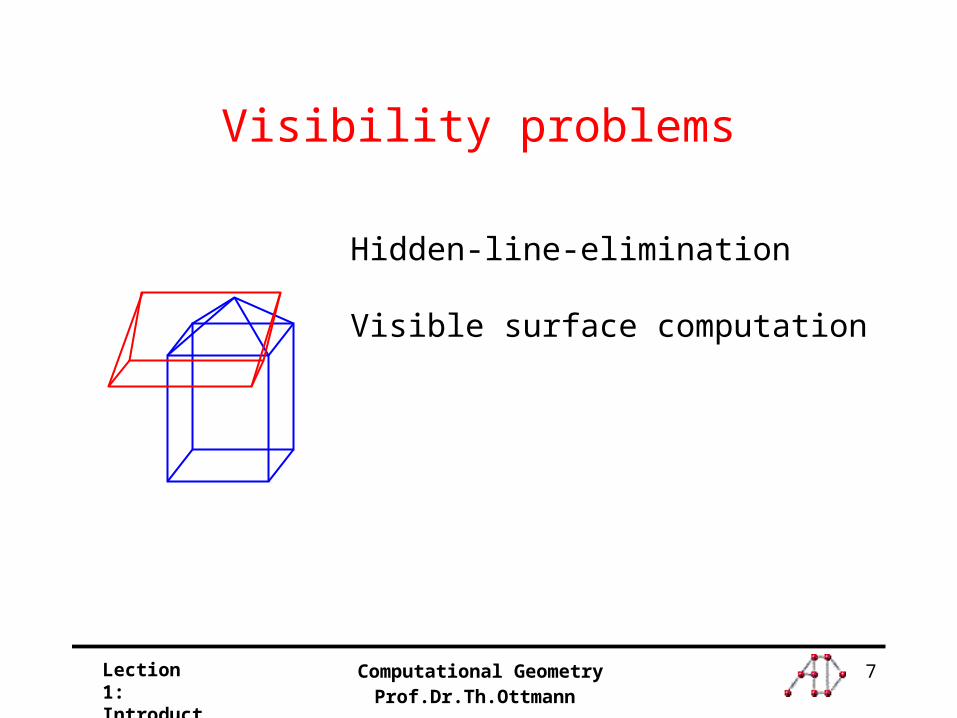
Visibility problems
Hidden-line-elimination
Visible surface computation
Computational Geometry Prof.Dr.Th.Ottmann
8Lection 1:Introduction
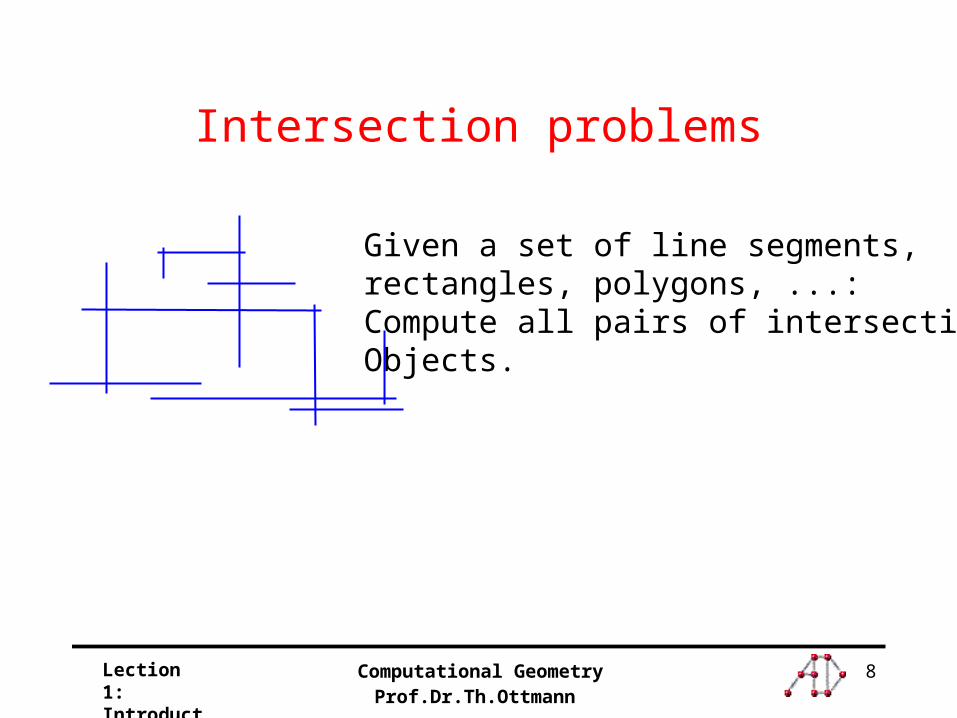
Intersection problems
Given a set of line segments,rectangles, polygons, ...:Compute all pairs of intersectingObjects.
Computational Geometry Prof.Dr.Th.Ottmann
9Lection 1:Introduction
Geometric objects: Points, lines, …
Computational Geometry Prof.Dr.Th.Ottmann
10Lection 1:Introduction
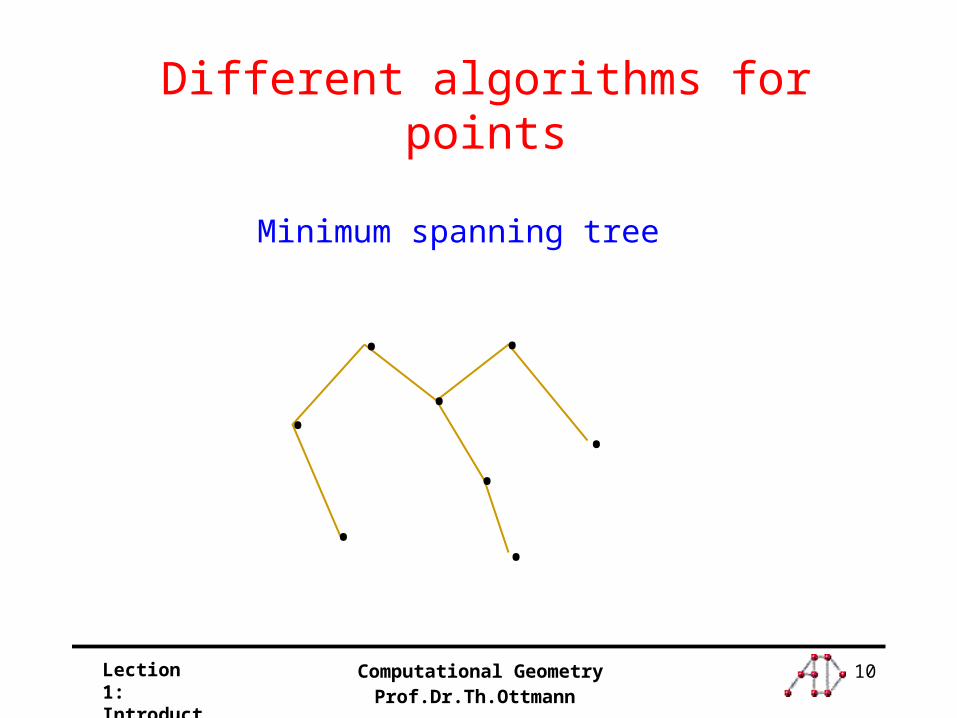
Different algorithms for points
Minimum spanning tree
•
• •
•
• •
•
•
Computational Geometry Prof.Dr.Th.Ottmann
11Lection 1:Introduction
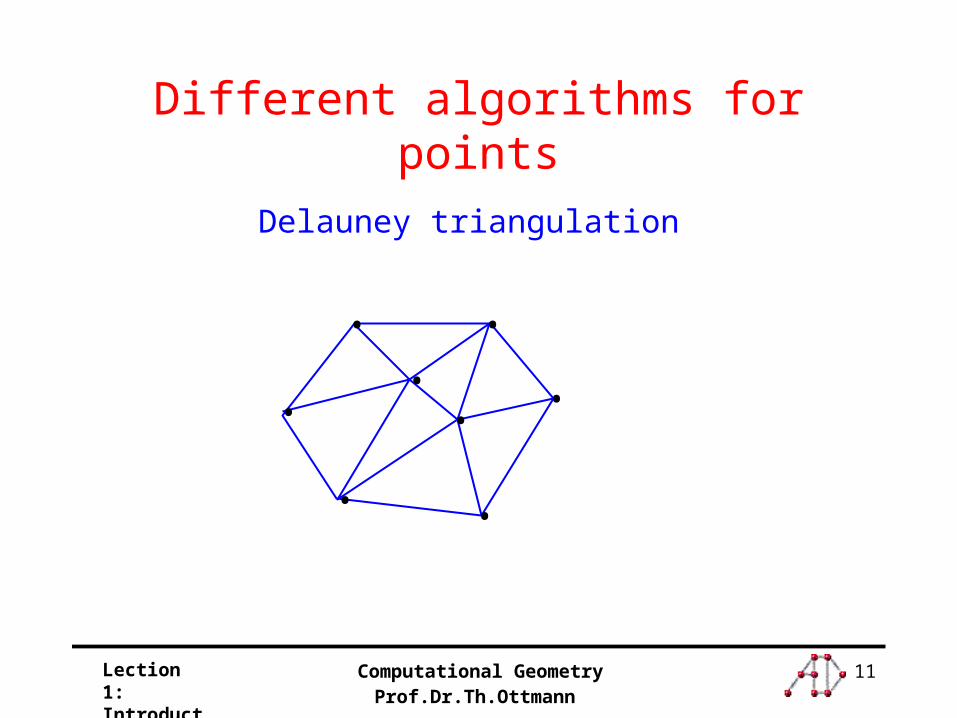
Different algorithms for points
Delauney triangulation
• •
•
• •
•
•
•
Computational Geometry Prof.Dr.Th.Ottmann
12Lection 1:Introduction
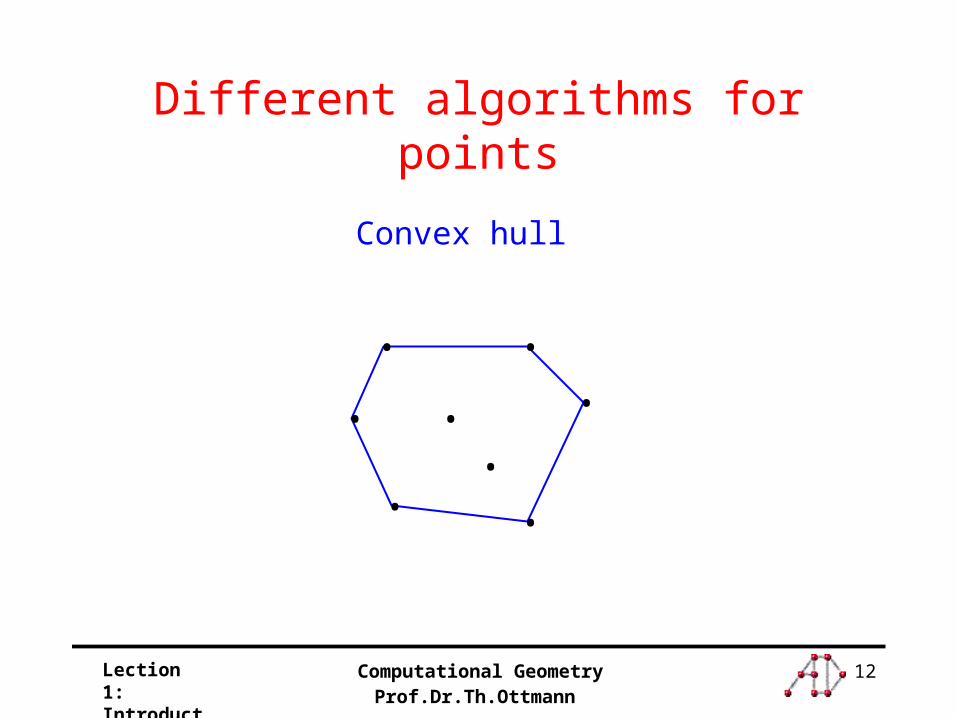
Different algorithms for points
Convex hull
•
•
•
•
•
•
•
•
Computational Geometry Prof.Dr.Th.Ottmann
13Lection 1:Introduction
Voronoi Region
Computational Geometry Prof.Dr.Th.Ottmann
14Lection 1:Introduction
Voronoi Diagram
Computational Geometry Prof.Dr.Th.Ottmann
15Lection 1:Introduction
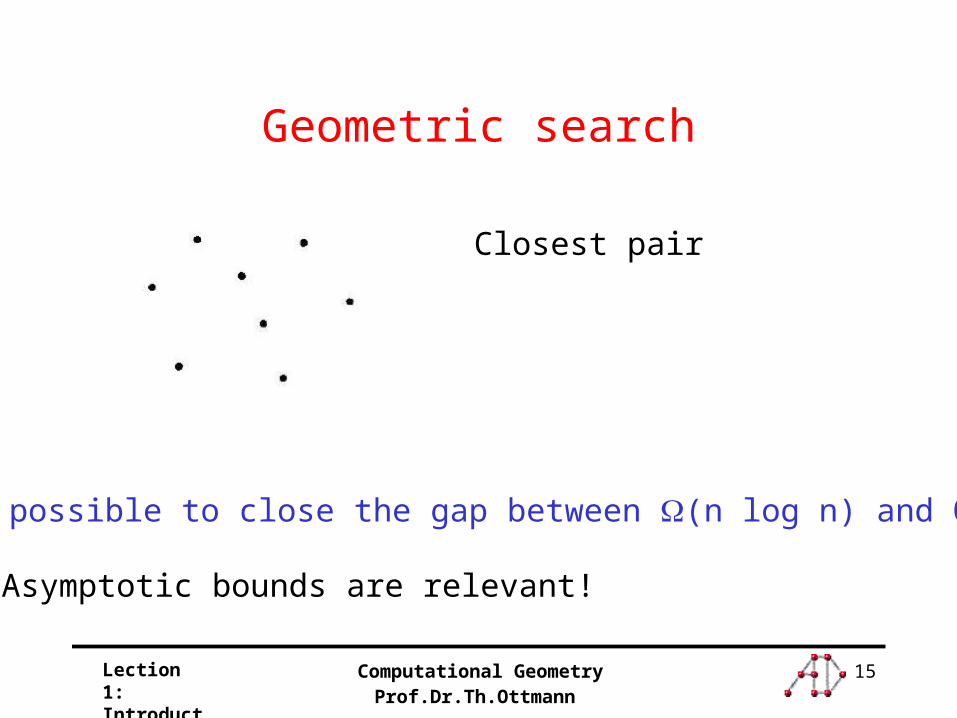
Geometric search
Closest pair
Is it possible to close the gap between (n log n) and O(n²)?
Asymptotic bounds are relevant!
Computational Geometry Prof.Dr.Th.Ottmann
16Lection 1:Introduction
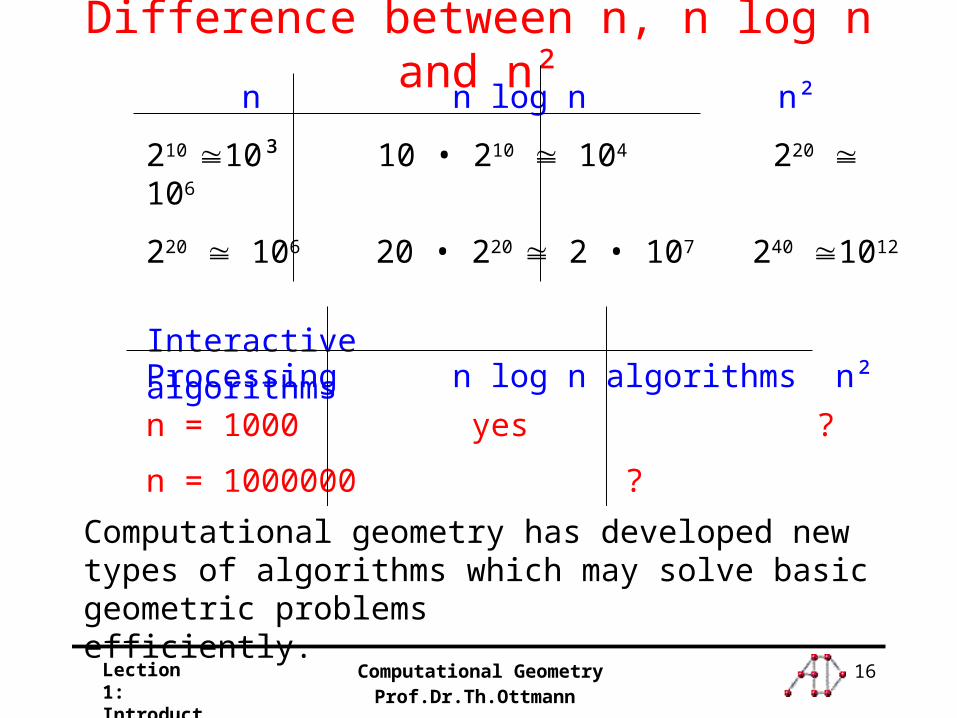
Difference between n, n log n and n² n n log n n²
210 10³ 10 • 210 104 220 106
220 106 20 • 220 2 • 107 240 1012
InteractiveProcessing n log n algorithms n² algorithmsn = 1000 yes ?
n = 1000000 ? no
Computational geometry has developed new types of algorithms which may solve basic geometric problemsefficiently.
Computational Geometry Prof.Dr.Th.Ottmann
17Lection 1:Introduction
Application domains
Computer graphics: 2- and 3-dimensional
Robotics, CAD, CAM
VLSI design
Database systems, GIS
Molecular modelling, ....
Computational Geometry Prof.Dr.Th.Ottmann
18Lection 1:Introduction
Geographical information systems
UNI-Offspring
sofion
Documentation, analysis, and maintenance of gas, water andsewage pipesand telecommunications lines
Computational Geometry Prof.Dr.Th.Ottmann
19Lection 1:Introduction
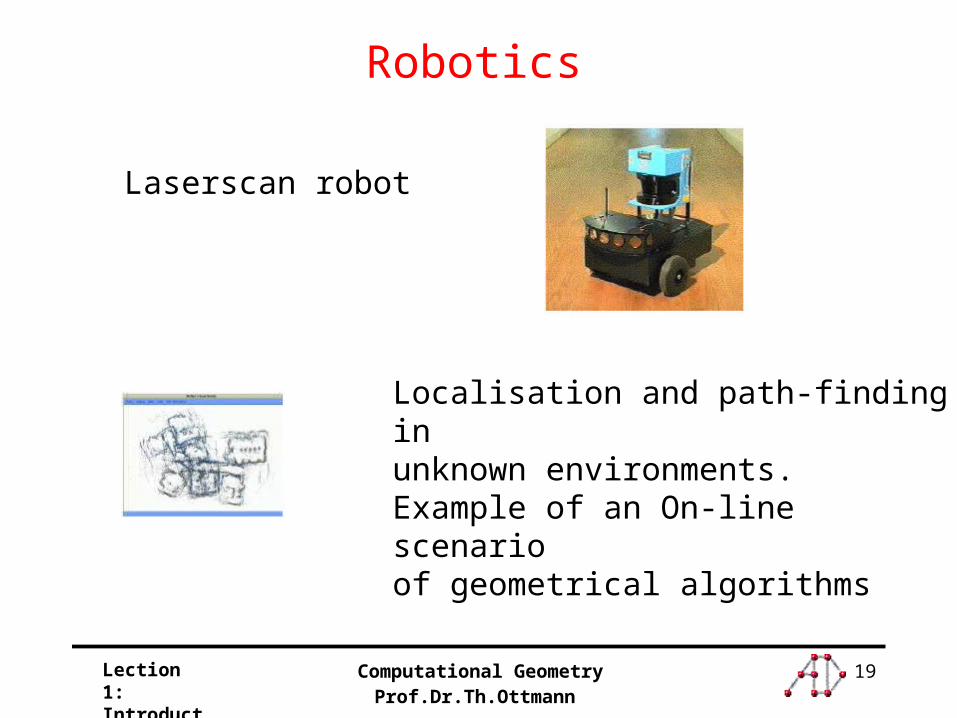
Robotics
Laserscan robot
Localisation and path-finding inunknown environments. Example of an On-line scenario of geometrical algorithms