lec1-intro & mech modelling (ae).ppt -...
TRANSCRIPT

INC 341 – Feedback Control Systems
Introduction
S Wongsa
Introduction
This course is all about …
System modelling
)()()()( tFtkxtxbtxm =++ &&&
System dynamics System control
From http://www.silhouettesclipart.com/wp-content/uploads/2007/10/car-clip-art07.jpg & 2.004 Dynamics and Control II, Fall 2007, MIT OCW.
System dynamics System control
Response Desired response

Introduction
Class instructors:
1. Sarawan Wongsa
Email: [email protected]
Office tel: 02 – 4709317
2. Benjamas Panomrattanarug
Email: [email protected]
Office hours: by appointment
Midterm course materials:
http://webstaff.kmutt.ac.th/~sarawan.won/AE/INC341
Introduction
Lecture Topic
1 Introduction to Feedback Control Systems
2 Transfer Function of Physical Systems:
3 Transfer Function of Physical Systems (cont.)
4 Dynamic Response Analysis
5 Dynamic Response Analysis (cont.)
6 Stability & Steady-State Error Analysis
Midterm Exam
Sarawan 50%
System modelling &
analysis
7 Root Locus
8 Root Locus (cont)
9 Compensator Design Using Root Locus
10 Compensator Design Using Root Locus (cont)
11 Frequency Response Analysis (Nyquist’s Criterion)
12 Frequency Response Analysis (Bode Plot)
13 Compensator Design Using Frequency Response Analysis
Final Exam
Benjamas 50%
Control Design

Core Text
Control Systems Engineering (5th/6th Edition), Norman S. Nise, Wiley.
Introduction
Introduction
What is Control?
Make some object (aka system/plant) behave as we desire.

Introduction
Some control systems…
Bionic ArmMaglev Train
ManufacturingProduct Display
Introduction
Two System Configurations
Open-loop systemOpen-loop system
Closed-loop/Feedback control system

Introduction
Example I : Potentiometer
Objective: Vary the amplitude of voltage by moving a rotating gear.
Click here for Interactive Animation
Introduction
Example III: Antenna Position Control System
Purpose: )()( tt io θθ ⇒
Click here for Interactive Animation

Introduction
This course is all about …
System modelling
)()()()( tFtkxtxbtxm =++ &&&
System dynamics System control
From http://www.silhouettesclipart.com/wp-content/uploads/2007/10/car-clip-art07.jpg & 2.004 Dynamics and Control II, Fall 2007, MIT OCW.
System dynamics System control
Response Desired response
Mathematical Modelling of LTI Systems
Mathematical Models of Linear Time Invariant (LTI) Systems
LTI
Systemx(t) y(t)
nth-order, LTI differential equation
)(...)()(
)(...)()(
01
1
101
1
1 txbdt
txdb
dt
txdbtya
dt
tyda
dt
tyda
m
m
mm
m
mn
n
nn
n
n +++=+++−
−
−−
−
−
Transfer function
0
1
1
0
1
1
...
...)(
)(
)(
asasa
bsbsbsG
sX
sYn
n
n
n
m
m
m
m
+++
+++==
−−
−−
G(s) is known as the transfer function.
If all initial conditions
are zero, taking the
Laplace transform of
both sides gives

Transfer Functions of Physical Systems
Mechanical Systems
Electrical & Electromechanical Systems Electrical & Electromechanical Systems
Transfer Functions of Physical Systems
Mechanical system components : translation

Transfer Functions of Physical Systems
Example: One degree of freedom
)(sG
[sum of impedances] X(s)=[sum of applied forces]
)()()()( tftKxtxftxM v =++ &&&
L
)()()(
)()()()(
2
2
sFsXKsfMs
sFsKXssXfsXMs
v
v
=++
=++
Transfer Functions of Physical Systems
Example : Two degrees of freedom
(a) Forces on M due only to motion of M
Forces on M1
(a) Forces on M1 due only to motion of M1
(b) Forces on M1 due only to motion of M2
(c) All forces on M1
)()(][)(])([ 22121
2
1 331sFsXKsfsXKKsffsM vvv =+−++++

Transfer Functions of Physical Systems
(a) Forces on M due only to motion of M
Forces on M2
Example : Two degrees of freedom
(a) Forces on M2 due only to motion of M2
(b) Forces on M2 due only to motion of M1
(c) All forces on M2
0)(])([)(][ 232
2
212 323=++++++− sXKKsffsMsXKsf vvv
Transfer Functions of Physical Systems
Example : Two degrees of freedom
Equations of motion
0)(])([)(][
)()(][)(])([
232
2
212
22121
2
1
323
331
=++++++−
=+−++++
sXKKsffsMsXKsf
sFsXKsfsXKKsffsM
vvv
vvv
Transfer Functions of Physical Systems
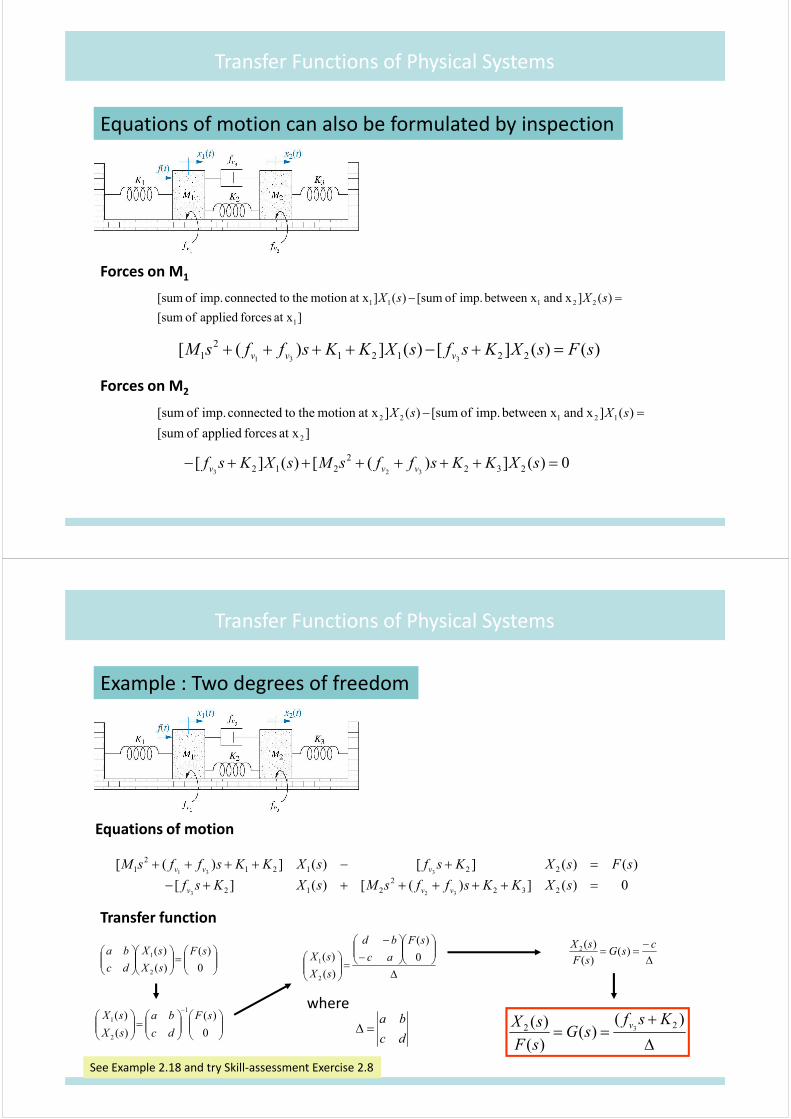
Equations of motion can also be formulated by inspection
Forces on M1
]at x forces applied of sum[
)(] xand between x imp. of sum[)(]at xmotion the toconnected imp. of [sum
1
22111 =− sXsX
)()(][)(])([ 22121
2
1 331sFsXKsfsXKKsffsM vvv =+−++++
Forces on M1
]at x forces applied of sum[
)(] xand between x imp. of sum[)(]at xmotion the toconnected imp. of [sum
2
12122 =− sXsX
Forces on M2
0)(])([)(][ 232
2
212 323=++++++− sXKKsffsMsXKsf vvv
Transfer Functions of Physical Systems
Example : Two degrees of freedom
Equations of motionEquations of motion
0)(])([)(][
)()(][)(])([
232
2
212
22121
2
1
323
331
=++++++−
=+−++++
sXKKsffsMsXKsf
sFsXKsfsXKKsffsM
vvv
vvv
Transfer function
=
0
)(
)(
)(
2
1 sF
sX
sX
dc
ba
=
−
0
)(
)(
)(1
2
1 sF
dc
ba
sX
sX
∆
−
−
=
0
)(
)(
)(
2
1
sF
ac
bd
sX
sX
∆
+==
)()(
)(
)( 22 3Ksf
sGsF
sX v
∆
−==
csG
sF
sX)(
)(
)(2
dc
ba=∆
where
See Example 2.18 and try Skill-assessment Exercise 2.8

Transfer Functions of Physical Systems
Mechanical system components : Rotation
K-Spring constant, D – coefficient of viscous friction, J – moment of inertia
Transfer Functions of Physical Systems
Example : Two equations of rotational motion
Torques on J
(a) Torques on J1 due only to motion of J1
(b) Torques on J1 due only to motion of J2
(c) All torques on J1
Torques on J1
)()(][)(][ 211
2
1 sTsKsKsDsJ =−++ θθ

Transfer Functions of Physical Systems
Example : Two equations of rotational motion
Torques on J2
(a) Torques on J2 due only to motion of J2
(b) Torques on J2 due only to motion of J1
(c) All torques on J2
Torques on J2
0)(][)(][ 22
2
21 =+++− sKsDsJsK θθ
Transfer Functions of Physical Systems
Example : Two equations of rotational motion
)()(][)(][ 211
2
1 sTsKsKsDsJ =−++ θθ
0)(][)(][ 22
2
21 =+++− sKsDsJsK θθ
Equations of motion

Transfer Functions of Physical Systems
Let’s get this done by inspection
Torques on J1
]at torquesapplied of sum[
)(] and between imp. of sum[)(]at motion the toconnected imp. of [sum
1
22111
θ
θθθθθ =− ss
)()(][)(][ 211
2
1 sTsKsKsDsJ =−++ θθ
See Example 2.20 and try Skill-assessment Exercise 2.9
]at torquesapplied of sum[
)(] and between imp. of sum[)(]at motion the toconnected imp. of [sum
2
12122
θ
θθθθθ =− ss
0)(][)(][ 22
2
21 =+++− sKsDsJsK θθ
Torques on J2
Transfer Functions of Physical Systems
Mechanical system components: rotation: gears
2
1
2
1
2
1
1
2
T
T
N
N
r
r===
θ
θ

Transfer Functions of Physical Systems
Can we represent this system as an equivalent system at
without the gears?1θ
Transfer Functions of Physical Systems
Gear transformations
)()()( 22
2 sTsKDsJs =++ θ1
212
2 )()()(N
NsTsKDsJs =++ θ(1) (2)
2
1
2
1
2
1
1
2
T
T
N
N
r
r===
θ
θ
1
211
2
12 )()()(N
NsTs
N
NKDsJs =++ θ(3)
)()( 11
2
2
1
2
2
12
2
2
1 sTsN
NKs
N
NDs
N
NJ =
+
+
θ
Rotational mechanical impedances can be
reflected through gear trains by multiplying
the mechanical impedance by the ratio
(Number of destination teeth/Number of source teeth)2

Transfer Functions of Physical Systems
Example: Reflected impedances
)()( 1
1
22221
2
1
22
21
2
1
2 sTN
NsKsDD
N
NsJJ
N
N
=
+
+
+
+
θ
See Example 2.22 and try Skill-assessment Exercise 2.10
eJ eD
Summary
Definition & examples of control systems
Transfer Functions of Physical Systems
Transfer functions & impedances of mechanical systems
KDsJs ++21
T(s) ΩΩΩΩ(s)

Next class
Transfer functions of electrical systems (2.1-2.4 of Ch 2).
Transfer functions of electro-mechanical (DC motor) systems (2.8 of Ch2).
Transfer Functions of Physical Systems
You are highly recommended to read these topics before coming to the next class!