large-scale nonparametric image parsing joseph tighe and svetlana lazebnik university of north...
Post on 20-Dec-2015
214 views
TRANSCRIPT

LARGE-SCALE NONPARAMETRIC IMAGE PARSING
Joseph Tighe and Svetlana Lazebnik
University of North Carolina at Chapel Hill
CVPR 2011Workshop on Large-Scale Learning for Vision
road
building
car
sky

Small-scale image parsingTens of classes, hundreds of images
He et al. (2004), Hoiem et al. (2005), Shotton et al. (2006, 2008, 2009), Verbeek and Triggs (2007), Rabinovich et al. (2007), Galleguillos et al. (2008), Gould et al. (2009), etc.
Figure from Shotton et al. (2009)
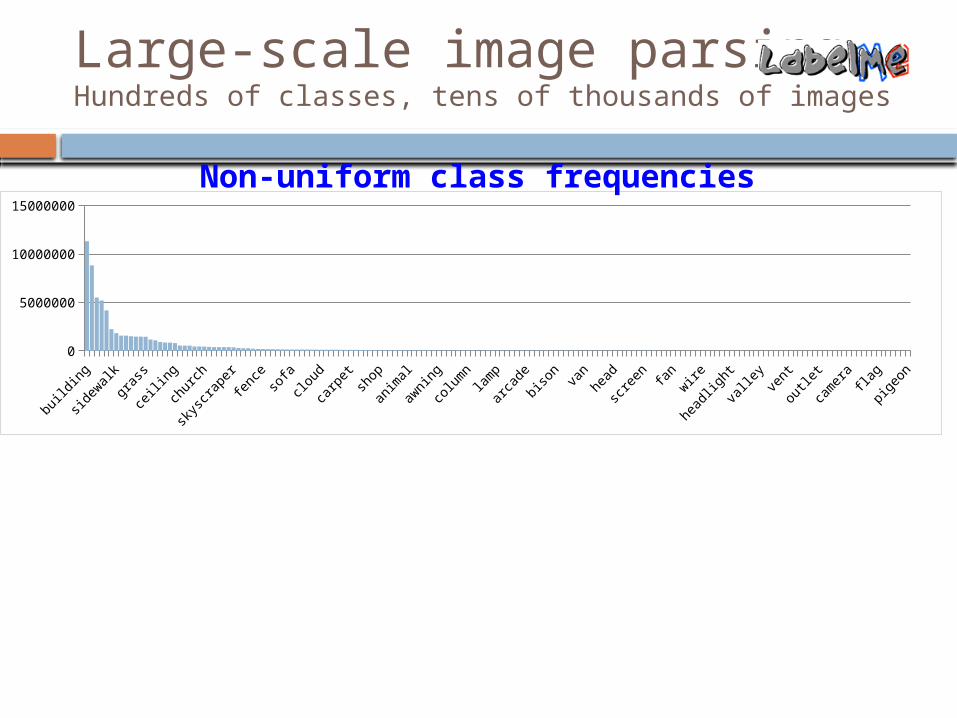
Large-scale image parsingHundreds of classes, tens of thousands of images
build
ing
floor sea
wat
ersa
ndpe
rson
skys
crap
ersign
mirr
orpi
llow
foun
tain
flower
shop
coun
ter t
oppa
per
furn
iture
cran
epo
tar
cade
brid
gewin
dshi
eld
brick
cloc
kdr
awer fan
dish
was
her
vase
clos
etha
ndle
bottl
eou
tlet
bag
tail
light
light
switc
h
0
2000000
4000000
6000000
8000000
10000000
12000000
Non-uniform class frequencies

Evolving training set
http://labelme.csail.mit.edu/
Large-scale image parsingHundreds of classes, tens of thousands of images
Non-uniform class frequencies

What’s considered important for small-scale image parsing? Combination of local cues Multiple segmentations, multiple scales Context Graphical model inference (CRFs, etc.)
How much of this is feasible for large-scale, dynamic datasets?
Challenges

Our first attempt: A nonparametric approach
Lazy learning: do (almost) nothing at training time
At test time: Find a retrieval set of similar images for
each query image Transfer labels from the retrieval set by
matching segmentation regions (superpixels)
Related work: SIFT Flow (Liu et al. 2008, 2009)

Step 1: Scene-level matching
Gist(Oliva & Torralba,
2001)
Spatial Pyramid(Lazebnik et al.,
2006)
Color Histogram
Retrieval set: Source of possible labelsSource of region-level matches
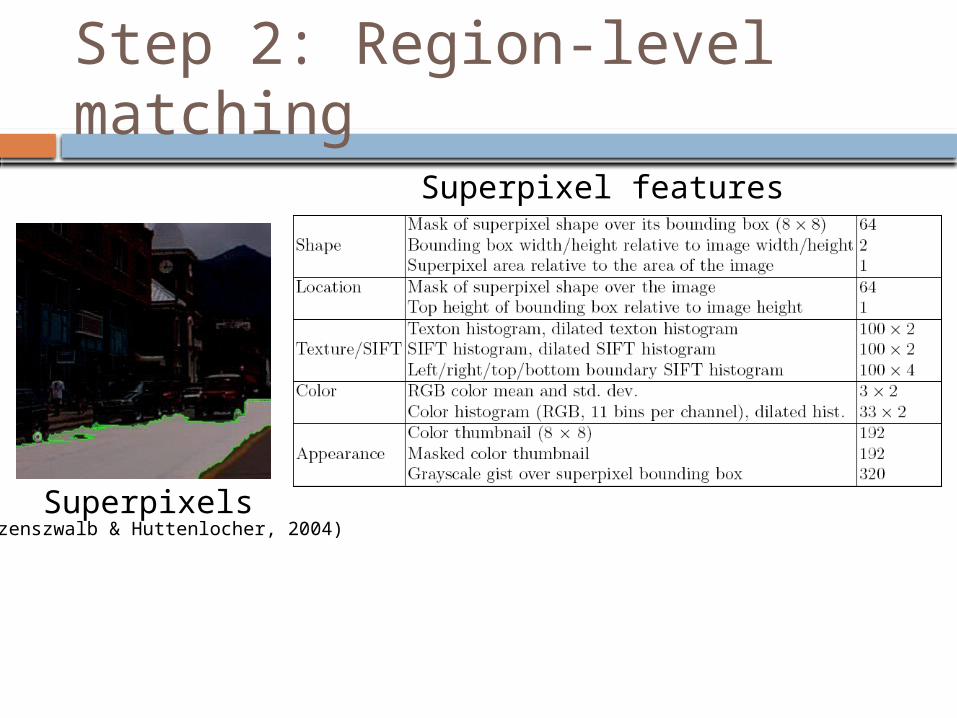
Step 2: Region-level matching
Superpixels(Felzenszwalb & Huttenlocher, 2004)
Superpixel features

Step 2: Region-level matching
Snow
Road
Tree
BuildingSky
Pixel Area (size)

Road
Sidewalk
Step 2: Region-level matching
Absolute mask(location)

Step 2: Region-level matching
Road
SkySnowSidewalk
Texture

Step 2: Region-level matching
Building
Sidewalk
Road
Color histogram
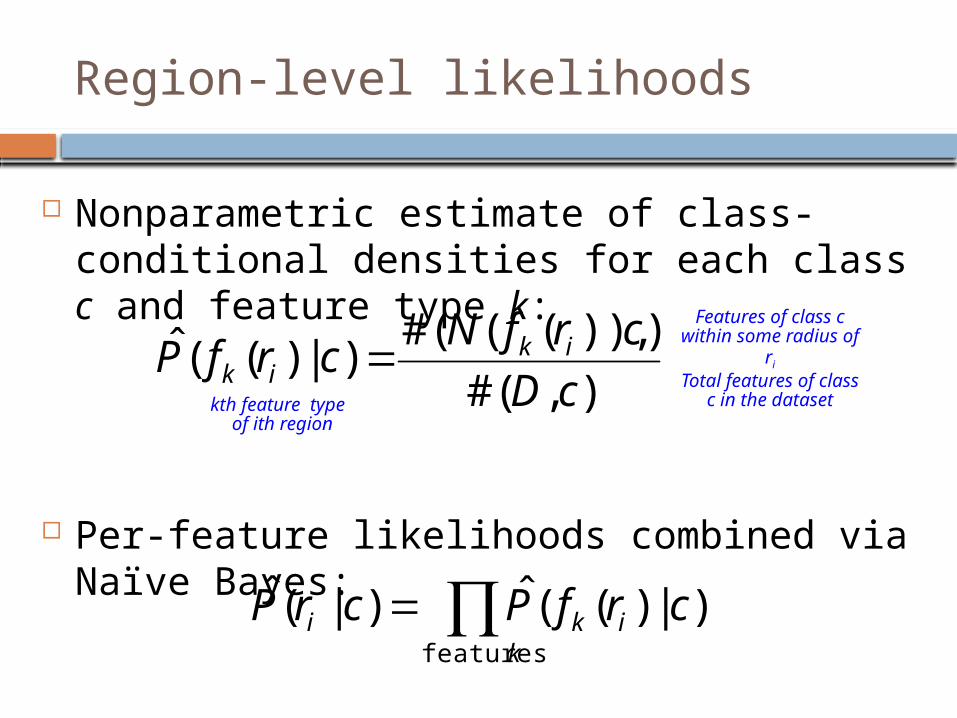
Region-level likelihoods
Nonparametric estimate of class-conditional densities for each class c and feature type k:
Per-feature likelihoods combined via Naïve Bayes:
),(#
))),(((#)|)((ˆ
cD
crfNcrfP ik
ik kth feature
type of ith region
Features of class c within some radius
of ri
Total features of class c in the
dataset
k
iki crfPcrPfeatures
)|)((ˆ)|(ˆ

Region-level likelihoods
Building Car Crosswalk
SkyWindowRoad

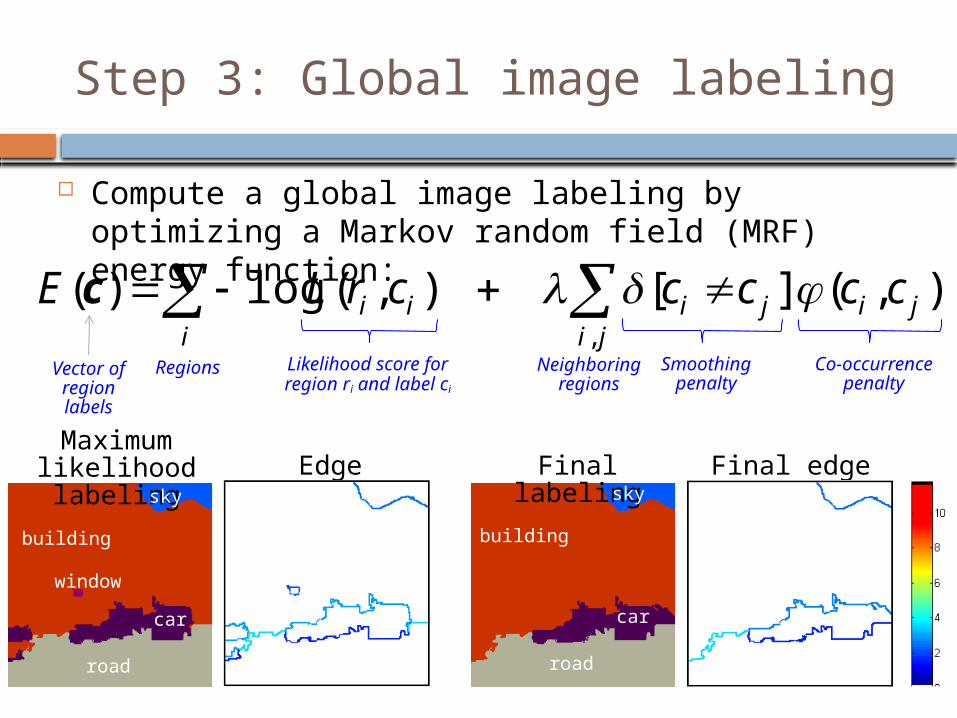
Step 3: Global image labeling
Compute a global image labeling by optimizing a Markov random field (MRF) energy function:
i ji
jijiii cccccrLE,
),(][),(log)( c
Likelihood score for region ri and label ci
Co-occurrence penalty
Vector of
region labels
Regions Neighboring regions
Smoothing penalty
Step 3: Global image labeling
Compute a global image labeling by optimizing a Markov random field (MRF) energy function:
Maximum likelihood labeling
Edge penalties Final labeling Final edge penalties
road
building
car
window
sky
road
building
car
sky
i ji
jijiii cccccrLE,
),(][),(log)( c
Likelihood score for region ri and label ci
Co-occurrence penalty
Vector of
region labels
Regions Neighboring regions
Smoothing penalty

Step 3: Global image labeling
Compute a global image labeling by optimizing a Markov random field (MRF) energy function:
sky
tree
sand
road
searoad
sky
sand
sea
Original imageMaximum likelihood labeling
Edge penalties MRF labeling
i ji
jijiii cccccrLE,
),(][),(log)( c
Likelihood score for region ri and label ci
Co-occurrence penalty
Vector of
region labels
Regions Neighboring regions
Smoothing penalty

Joint geometric/semantic labeling
Semantic labels: road, grass, building, car, etc. Geometric labels: sky, vertical, horizontal
Gould et al. (ICCV 2009)
sky
treecar
road
sky
horizontal
vertical
Original image Semantic labeling Geometric labeling

Joint geometric/semantic labeling
Objective function for joint labeling:
ir
ii gcEEF regions
),()()(),( gcgc
Geometric/semantic consistency penalty
Semantic labels
Geometric labels
Cost of semantic labeling
Cost of geometric labeling
sky
treecar
road
sky
horizontal
vertical
Original image Semantic labeling Geometric labeling

Example of joint labeling
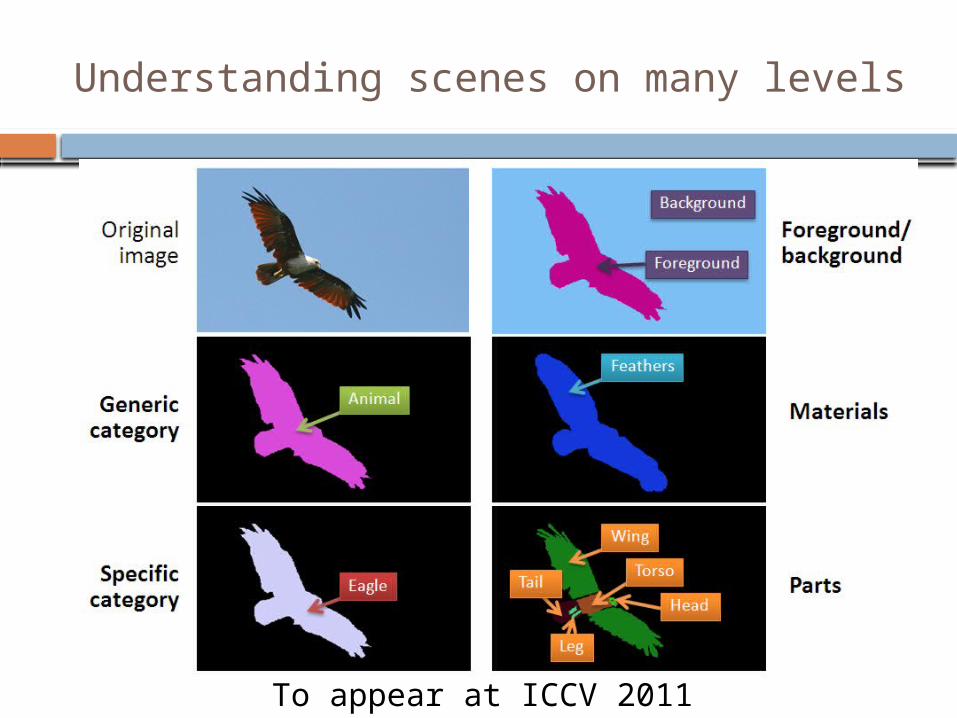
Understanding scenes on many levels
To appear at ICCV 2011

Datasets
Training images
Test images Labels
SIFT Flow (Liu et al., 2009)
2,488 200 33
Barcelona (Russell et al., 2007)
14,871 279 170
LabelMe+SUN 50,424 300 232

Datasets
wal
l
book
s...
plat
ech
air
bed
keyb
oard
uten
sil
scre
ende
sk
cupb
oard
napk
in
plac
emat cu
p
pict
ure
coun
ter..
.
lam
pto
ilet
1001000
10000100000
1000000
# o
f S
u-
perp
ixels
build
ing
tree
road ca
r
win
dow
river
rock
sand
dese
rt
pers
on
fenc
e
awni
ng
cros
swal
kbo
atpo
leco
w
moo
n100
100010000
1000001000000
Log
Sca
le
(x1
00
0)
Training images
Test images Labels
SIFT Flow (Liu et al., 2009)
2,488 200 33
Barcelona (Russell et al., 2007)
14,871 279 170
LabelMe+SUN 50,424 300 232

Overall performance
SIFT Flow Barcelona LabelMe + SUN
Semantic Geom.
Semantic Geom. Semantic Geom.
Base 73.2 (29.1)
89.8 62.5 (8.0) 89.9 46.8 (10.7)
81.5
MRF 76.3 (28.8)
89.9 66.6 (7.6) 90.2 50.0 (9.1) 81.0
MRF + Joint 76.9 (29.4)
90.8 66.9 (7.6) 90.7 50.2 (10.5)
82.2LabelMe + SUN Indoor LabelMe + SUN Outdoor
Semantic Geom. Semantic Geom.
Base 22.4 (9.5) 76.1 53.8 (11.0) 83.1
MRF 27.5 (6.5) 76.4 56.4 (8.6) 82.3
MRF + Joint 27.8 (9.0) 78.2 56.6 (10.8) 84.1
*SIFT Flow: 74.75

Per-class classification rates
0%
25%
50%
75%
100%SiftFlow Barcelona LM + Sun
0%25%50%75%
100%

Results on SIFT Flow dataset
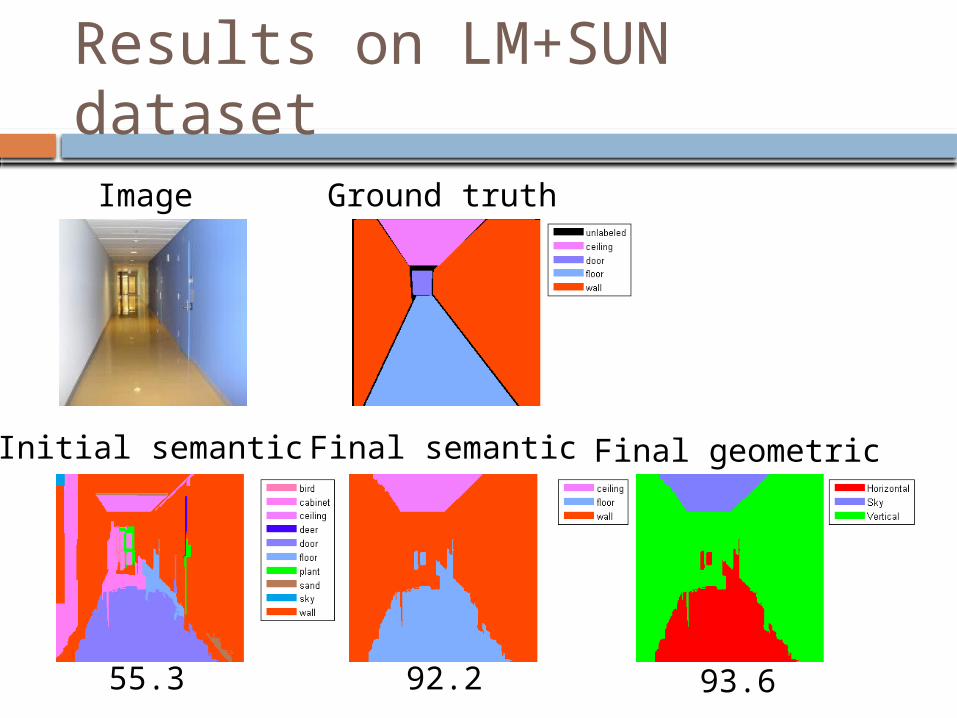
55.3 92.2 93.6
Results on LM+SUN dataset
Image Ground truth
Initial semantic Final semantic Final geometric

58.9 93.057.3
Results on LM+SUN dataset
Image Ground truth
Initial semantic Final semantic Final geometric

11.6
0.0
60.3 93.0
Image Ground truth
Initial semantic Final semantic Final geometric
Results on LM+SUN dataset

65.6 75.8 87.7
Image Ground truth
Initial semantic Final semantic Final geometric
Results on LM+SUN dataset

Running times
SIFT Flow
Barcelona
dataset

Conclusions
Lessons learned Can go pretty far with very little learning Good local features, global (scene) context
more important than neighborhood context
What’s missing A rich representation for
scene understanding The long tail Scalable, dynamic
learningroad
building
car
sky