large-eddy simulations for internal combustion engines - a review
TRANSCRIPT

http://jer.sagepub.com/International Journal of Engine Research
http://jer.sagepub.com/content/12/5/421The online version of this article can be found at:
DOI: 10.1177/1468087411407248
2011 12: 421 originally published online 24 August 2011International Journal of Engine ResearchC J Rutland
a review−Large-eddy simulations for internal combustion engines
Published by:
http://www.sagepublications.com
On behalf of:
Institution of Mechanical Engineers
can be found at:International Journal of Engine ResearchAdditional services and information for
Immediate free access via SAGE ChoiceOpen Access:
http://jer.sagepub.com/cgi/alertsEmail Alerts:
http://jer.sagepub.com/subscriptionsSubscriptions:
http://www.sagepub.com/journalsReprints.navReprints:
http://www.sagepub.com/journalsPermissions.navPermissions:
http://jer.sagepub.com/content/12/5/421.refs.htmlCitations:
What is This?
- Aug 24, 2011 OnlineFirst Version of Record
- Oct 5, 2011Version of Record >>
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

Large-eddy simulations for internal combustionengines – a reviewC J Rutland
Engine Research Center, University of Wisconsin - Madison, Madison, WI, USA.
email: [email protected]
The manuscript was received on 12 August 2010 and was accepted after revision for publication on 16 March 2011.
DOI: 10.1177/1468087411407248
Abstract: A review of using large-eddy simulation (LES) in computational fluid dynamic stud-ies of internal combustion engines is presented. Background material on turbulence model-ling, LES approaches, specifically for engines, and the expectations of LES results arediscussed. The major modelling approaches for turbulence, combustion, scalars, and liquidsprays are discussed. In each of these areas, a taxonomy is presented for the various types ofmodels appropriate for engines. Advantages, disadvantages, and examples of use in the litera-ture are described for the various types of models. Several recent examples of engine studiesusing LES are discussed. Recommendations and future prospects are included.
Keywords: LES, engines, CFD, turbulence, combustion, sprays
1 INTRODUCTION
It is generally agreed that the next generation of tur-
bulence modelling in computational fluid dynamics
(CFD) for many applications will be some form of
large-eddy simulation (LES). For the appropriate
applications, LES can offer significant advantages
over traditional Reynolds Averaged Navier Stokes
(RANS) modelling approaches. For example, in
internal combustion (IC) reciprocating engines, LES
can be used to study cycle-to-cycle variability, pro-
vide more design sensitivity for investigating both
geometrical and operational changes, and produce
more detailed and accurate results. There are also
characteristics of IC engines, such as inherent
unsteadiness and a moderately sized domain, that
are well suited to LES. This is not to say that LES will
replace RANS. There are pluses and minuses for
both methods and users should pick the appropriate
tool for the topics being studied. However, as inex-
pensive computing power increases, the ability to
use LES in IC engine simulations is increasing.
As LES gains in capability, there is the potential for
a larger set of people using the models and a broader
application of LES to engines. In addition, LES in IC
engines is new, and there are potential uncertainties
and ambiguities since a generally accepted ‘best
practice’ is still developing. This motivates the objec-
tive of this paper, which is to describe and categorize
the current LES models that could have application
to engines and to evaluate their suitability and poten-
tial predictive capability for use in engine CFD. This
is meant to help users of engine CFD be better
informed about LES so that it can be used wisely.
In several important ways, IC engines are a good
application for LES. The flow physics are well suited
to LES in that: (a) the flows are inherently unsteady
due to moving piston and valves, (b) large-scale flow
structures are usually important, (c) the Reynolds
numbers of engine flows are modest, commonly of
the order of 10 000 to 30 000, and (d) the domain of
interest is primarily confined and moderate in size.
The last two points result in grid requirements that
are more limited than other applications such as
aeronautical flows. This has even tempted some
researchers to claim that they are approaching
direct numerical simulation (DNS) engine simula-
tions [1], although this is probably overstating the
situation. In addition, the low Reynolds numbers in
engines and the reduced, or even missing, inertial
range indicate that traditional LES models may not
work as well in these applications.
REVIEW PAPER 421
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from
In contrast, the complex physical processes that
occur in engines increase the difficulty for any CFD
modelling, including LES. Models (sometimes called
submodels) are required, not only for turbulence,
but also for liquid sprays, combustion, and various
scalar processes. This means that LES modelling for
engines should be more than just using a turbulence
model, such as the dynamic Smagorinsky model,
and leaving all of the other submodels the same as
RANS models. Unfortunately, this approach is fairly
common, as shown in a later section, and is another
motivation for this report. Proper use of LES in
engines requires potential modification of many
submodels to make them consistent within the LES
context.
The evaluation of LES models in this review is
focused on IC engine cylinder flows, including the
gas exchange, spray, and combustion processes.
This is because of their primary importance in
determining engine fuel efficiency and emissions.
The review contains three major sections. First, a
general discussion of LES is provided. This includes
specific IC engine issues and uses RANS to provide
a context for understanding LES. Second, the vari-
ous types of LES models that might be applied to
engine simulations are listed and categorized. This
includes lists and discussions for basic turbulence
models, combustion models, scalar mixing models,
and fuel-spray models. Next, there is a section that
presents several recent studies that use LES to
simulate IC engines. This section uses the model
taxonomy from the previous section to help cate-
gorize the types of LES models being used in the
various studies. The review concludes with a sec-
tion that discusses future prospects of LES of
engines.
In this article, it is assumed that the reader is
familiar with basic turbulence modelling in engine
CFD applications and has some familiarity with the
concepts underlying the LES approach. While some
background information is provided, the emphasis
in this paper is on describing and evaluating current
LES approaches as they pertain to IC engines. The
report does not include a tutorial on LES modelling
or detailed descriptive equations of the models dis-
cussed. Some details are provided in the
Appendices, but readers seeking detailed model
descriptions or a basic primer on LES are encour-
aged to consult excellent resources of general LES
theory and modelling presented by Ferziger [2],
Fureby et al. [3, 4], Geurts [5], Piomelli [6], and
Pope [7]. While there are interesting advanced LES
models in the literature, they are not addressed here
since the focus is on approaches that are mature
enough to show promise for near-term successful
use in real engine simulations.
2 GENERAL LES BACKGROUND
The word ‘LES’ is becoming very common as a way
to describe a variety of turbulent flow simulations.
Some researchers working on CFD turbulence mod-
els may describe their models as LES, even if they
may not follow traditional approaches. Generally,
most people use the term ‘LES’ to mean fairly
simple, dissipative models for single phase, non-
reacting turbulence. Large-eddy simulation models
for scalar mixing, combustion, and liquid sprays have
not received much attention, but are very important
for engine applications. However, even in the engine
CFD community, LES is still often used to indicate a
model for the turbulence only. The remaining mod-
els, such as combustion, are essentially RANS-based
models. This is a type of hybrid approach that can be
useful and is discussed in section 2.2.
Formally, LES means solving equations that have
been spatially filtered (see appendix 2). This is in
contrast to RANS approaches in which ensemble
averaging has been used. Reynolds Averaged Navier
Stokes is better known than LES and is used here to
provide a context for understanding LES. Note that
in the IC engine community, RANS refers to unstea-
dy RANS (also known as URANS). An important dif-
ference in LES and RANS is in the interpretation of
the results and the reasoning used to build the mod-
els. Both LES filtering and RANS averaging processes
result in similar equations with similar terms that
must be modelled. Yet, the physical meaning of
these terms and their required modelling can be
very different, and this will impact the proper for-
mulation of models.
The averaging process in both LES and RANS
results in separation of velocity components into
two parts
ui = ~ui + u00i (1)
Here, the overbar symbol represents the spatial fil-
tering in LES or the ensemble averaging in RANS.
For engines, density varies significantly and the
overbar represents a mass weighted (or Favre) filter-
ing or averaging [8]. Then, ui is usually called the
mean velocity, although more formally it is the fil-
tered velocity in LES. In both LES and RANS, the
overbar represents an averaging process designed to
reduce the range of eddy sizes or length scales
in the flow so that ui can be represented on a com-
putational grid appropriate for engines. An
422 C J Rutland
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

important point to understand is that this averaging
process is never performed in either an LES or a
RANS code. From an applications point of view, the
operation that produces the overbar is purely con-
ceptual. This means the distinction between LES
and RANS occurs primarily in the choice of models
as described below. This choice is influenced by the
desired meaning of the overbar and the objective of
the simulation.
The third term in equation (1), u00
i , is either the
subgrid velocity in LES or the fluctuating velocity in
RANS. However, like the mean or filtered velocity,
ui, the distinct meaning of u00
i , is not explicitly for-
mulated in CFD codes. Again, it is conceptual and
depends on the choice of the approach used, either
LES or RANS, and on the model formulations. The
models should have the correct characteristics for
RANS or LES. For example, in RANS, the average of
the fluctuating velocity is zero, but in LES, the fil-
tered subgrid velocity is not zero. In LES, both ui
and u00
i are dependent on the filter size and the
impact of modelling in LES should decrease as the
filter size decreases.
The introduction of the velocity decomposition,
equation (1), into the differential momentum equa-
tion results in the following equation
∂�r ~ui
∂t+∂�r ~ui ~uj
∂xj= � ∂�r
∂xi+∂Gij
∂xj� ∂�rtij
∂xj(2)
where Gij is the viscous stress tensor. As stated, this
equation is for ui and is used in both LES and RANS.
The tij term represents the subgrid stresses in LES
or the Reynolds stresses in RANS. However, once
again, this distinction is primarily conceptual and
the actual subgrid stresses or Reynolds stresses are
never calculated in a CFD code. Only a model for tij
is calculated and the specific model used is a pri-
mary distinction between LES and RANS.
There are other aspects of a calculation that sepa-
rate LES and RANS that are discussed later.
However, at the equation level, the similarity is clear
and it is probably best to view LES as an evolving
development of turbulence modelling rather than a
completely new approach distinct from RANS. The
equations also point out the importance of the
choice one makes for modelling the term tij.
Turbulence modelling for the term tij means
that it must be represented in terms of quantities
that are known through their own equation, pri-
marily ui. The most common form of turbulence
modelling involves the use a quantity called the
turbulent viscosity, nT. Using a Boussinesq or
mean-gradient assumption gives the following
traditional model
trij = � 2nT
~Sij(3)
where trij is the anisotropic portion of tij (see, for
example, Pope [9]) and ~Sij is the strain rate
~Sij =1
2
∂~ui
∂xj+∂~uj
∂xi
� �(4)
Once again, we arrive at an important observation
that equation (3) is used in both LES and RANS
codes. Until a model for nT is specified, the LES and
RANS equations are still the same. This means that
LES models based on equation (3) can have the
same difficulties and limitations as RANS models. If
LES is to offer an improvement over RANS, it seems
that there should be distinct differences in the char-
acteristics of the turbulence model. This discussion
continues in more detail in section 2.2, after explor-
ing the expectations of LES, so that a more informed
evaluation can be made.
2.1 Expectations of LES
There is a broad perception that LES is an improve-
ment over RANS modelling for engines that is based
on several general expectations about LES simulations
and results. These expectations are consis-tent with
the general characteristics of the two approaches, and
can be important because they help to distinguish
between LES and RANS simulations beyond a theore-
tically based distinction. They also offer a useful
method for evaluating LES results that is less formal
than full validation against experimental data. These
expectations can be grouped into several major cate-
gories that are discussed in the following subsection.
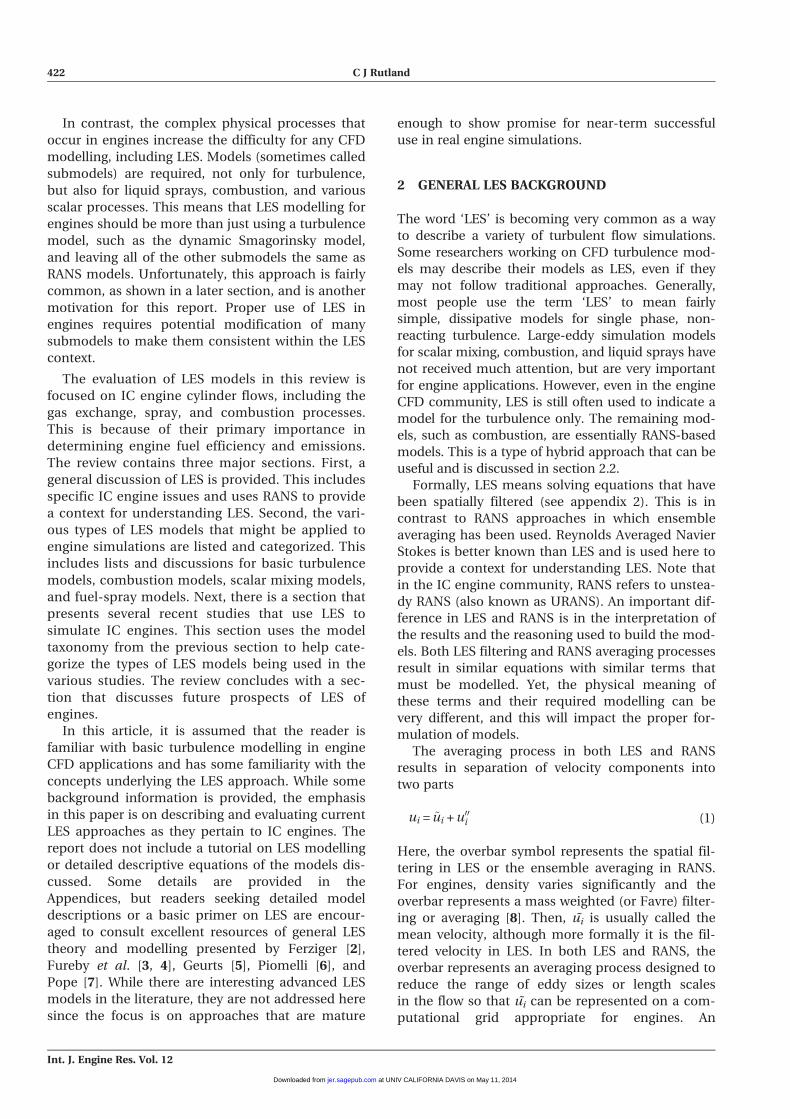
2.1.1 More flow structures
One of the primary expectations is that there will be
more flow structures, eddies, and vortices repre-
sented on the computational grid. Figure 1 shows a
comparison of RANS and LES results that illustrates
this defining characteristic of LES results. This only
serves to demonstrate the difference in results since
a proper comparison would require simulating sev-
eral LES cycles and ensemble averaging the results.
The eddies and vortices resolved on the LES grid
could be described as turbulence, but in this paper,
they will be referred to as flow structures to avoid
confusion. The increased flow structures are due
primarily to the lower dissipation in an LES turbu-
lence model compared to a RANS model. In terms
of equation (3), LES models use a smaller value for
the turbulent viscosity, nT. Correspondingly, there is
usually more kinetic energy in the LES flow
Large-eddy simulations for internal combustion engines – a review 423
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from
structures. Increased grid resolution can also play a
role in permitting more flow structures on the grid,
but as discussed below, this is not always required.
2.1.2 Better predictive capability
Another expectation of LES is that it will provide bet-
ter predictive capability. This is based on the argu-
ment that the CFD solver for the resolved scales, ui,
is doing more of the turbulence calculation using the
momentum equation itself, as evidenced by the
increase in flow structures. Thus, the turbulence
model is required to do less. Since there is more
uncertainty in the turbulence model than in the basic
equations, the simulations have the potential to be
more predictive. However, this assumption is not
universally true and can be hard to substantiate and
fully validate for LES. Problems and uncertainties in
boundary conditions, initial conditions, turbulence
models, and grid resolution can contribute to LES
results that are not as good as RANS results, even
though there is more resolved flow structures.
2.1.3 Interpretation of results is different
The LES framework of spatially averaged terms means
that results do not represent ensemble averages. This
is advantageous in the sense that new phenomenon
can be studied with LES. However, it can be a disad-
vantage if one is trying to compare to experimental
results that are often averaged over many cycles.
Proper comparison with experiments requires multi-
ple cycle LES simulations and the related increase in
computational time. Users should match the CFD
modelling tool to the problem at hand and use LES
appropriately.
2.1.4 Easier models
Another possible expectation of LES simulations is
that the models involved will use fewer adjustable
coefficients and thus be easier to use. This can
occur because some LES models are designed to
automatically adjust coefficients according to the
local flow conditions. This is typically called the
‘dynamic approach’ and was one of the major
advances in LES modelling in the 1990s (see [11]
and appendix 3). However, another way to under-
stand the reduced number of coefficients is to real-
ize that LES turbulence models are often simpler
than the models commonly used in RANS in part
because they do not have to account for ensemble
average statistics.
2.1.5 More CPU time
A final expectation of LES simulations is that they
will require more computer time than RANS mod-
els. This expectation is true, but not always to the
extent that one may expect. The increase in CPU
time reported in many LES studies is due to the
greatly increased number of grid points compared
to standard RANS grids. This increase is due in large
part to the simple and sometimes crude LES models
being used. The simple models often require denser
grids so that more energy is in the resolved scales
and the models play only a minor role. However, a
good LES model does not necessarily require a
major increase in the number of grid points. For
comparable grids, good LES models themselves
often require only a modest increase in computer
times, typically of the order of 20 per cent longer.
The issue of grid resolution and turbulence model-
ling is important and discussed in more detail in the
following section.
2.2 Turbulence modelling
Flow structures and turbulence in general arise from
the non-linear terms, ∂�r ~ui ~uj=∂xj, in the momentum
equation (equation (2)). Thus, the expected increase
in resolved scale flow structures in LES must come
from these terms. The flow structures do not come
Fig. 1 Comparison of (a) RNG RANS and (b) LESvelocity vectors to demonstrate more flowstructures appearing in the LES on the samecomputational grid (from [10], reprinted withpermission from SAE paper 2003-01-1069, �2003, SAE International)
424 C J Rutland
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from
from the turbulence model. To achieve the
increased flow structures, the non-linear terms must
be allowed to function sufficiently. This can be
achieved through less dissipative turbulence models
and/or a denser grid. Both of these increase the
kinetic energy in the resolved scales so that non-
linear interactions are stronger and flow structures
are more likely to develop.
To achieve flow structures in LES, one can choose
between crude turbulence models with more grid
cells or better turbulence models with reduced grid
requirements. The choice of denser grids with
simple models is the traditional way to achieve
flow structures. However, it comes at the price of
increased computational time. The denser grid pro-
vides more resolution so that a wider range of
resolved length scales are maintained and non-
linear interactions are more likely to occur. In this
case, it is often acceptable to use simple turbulence
models since they are not required to do much
other than provide dissipation at the small scales.
As shown below, the problem is that often the mod-
els are so simple that they provide dissipation over a
wide range of length scales, and one is forced to
provide even more grid resolution to counteract this
effect.
In many situations, the number of cells in a grid
could be reduced and the grid would still be suffi-
cient for maintaining a range of length scales and
allowing non-linear interactions. However, the tur-
bulence model must allow this to happen. Simply
choosing a less dissipative but crude model often
will not work because of numerical instability. In
addition, reduced dissipation is counter to the con-
cept of LES spatial filtering in which more subgrid
dissipation should occur as the number of cells in
the grid decreases. Instead, the turbulence model
needs to improve as the number of grid cells is
reduced. An important characteristic of better LES
turbulence models are ones that let the non-linear
interactions occur while still maintaining numerical
stability.
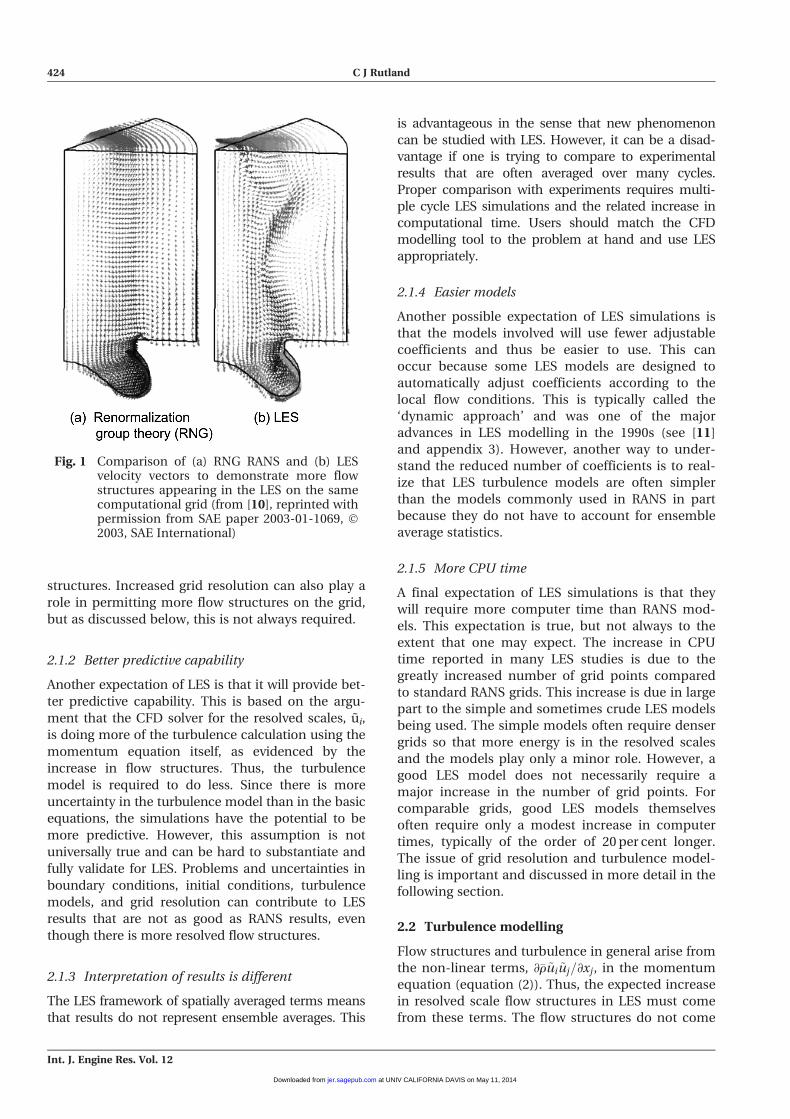
An example of one such turbulence model is
shown in Fig. 2. The model is one of a class known
as dynamic structure models described in appendix
4. Several of the dynamic structure models are com-
pared to the two most common LES models used in
engines: the Smagorinsky model based on equation
(3) and the viscosity-based one-equation model to
be described later. The figure shows the power spec-
tra of the transfer term between the resolved flow
kinetic energy and the subgrid kinetic energy. This
is the energy that is removed from the large scales.
The dynamic structure models follow the spectra
from the DNS result much better. It is characterized
by higher values at higher wave numbers (smaller
scales) and lower values at lower wave numbers. In
contrast, the Smagorinsky and viscosity-based one-
equation models show high values at all wave num-
bers. This indicates that these models take energy
out of the resolved scales (low wave numbers) and
reduce the possibility that non-linear interactions
will occur and result in flow structures. Thus, a den-
ser grid is required with these types of model to
counteract the overly dissipative effect. The dyna-
mic structure model reduces resolved scale energy
primarily in the small scales and lets the resolved
scale non-linear actions occur.
The use of dense grids and simple models goes
back to the early work on LES [13]. The initial argu-
ment for LES was that the filtering size and hence
the grid size should be well into the inertial sub-
range of an isotropic turbulence spectrum. This also
justifies a simpler turbulence model. However, look-
ing more closely, one sees that the inertial subrange
requirement was not part of the original LES defini-
tion. Originally, LES meant only that spatial filtering
rather than ensemble averaging was being used
[14]. The requirement for dense grids and inertial
range inclusion grew out of the common use of sim-
ple, overly dissipative models such as Smagorinsky.
This type of approach is still common when LES is
used to study more basic or fundamental aspects
of turbulence. In those situations, the flow is often
for a simple configuration such as homogeneous
turbulence. This also allows the use of higher order
Fig. 2 Power spectra of the subgrid kinetic energyproduction term as a function of wave numberfor rotating turbulence. DNS is direct numericalsimulation, SM is a Smagorinsky model (T2,described in Table 2), KEM is a viscosity-basedkinetic energy equation model (T5), SSM is ascale-similarity model, and the rest are all var-iations of the dynamic structure model (T7)(from [12])
Large-eddy simulations for internal combustion engines – a review 425
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

numerical methods that avoided numerical
dissipation.
However, the use of very dense grids in simple
flow configurations is a more scientific use of LES
and is distinctly different from using LES in applica-
tions such as IC engines. Flows are almost never
homogeneous in applications. Traditional concepts,
such as the inertial subrange, rely on a sufficient
statistical population that often does not exist at the
smaller scale subgrid level in a complex evolving
flow. In engine applications, it is not practical to use
extremely dense grids or higher order numerical
methods. The domain size and configuration do not
allow it. In addition, the more complex physical
processes, such as combustion and sprays in
engines, require their own modelling and computa-
tional time. Thus, most practical LES applications
for engines must use coarser grids and lower order
numerics.
To account for the different types of LES, the
notation ‘scientific LES’ and ‘engineering LES’ is
introduced. Some of the characteristics of these two
types are listed in Table 1. Since the motivation and
objectives of the two types of LES are different, each
should be evaluated within their own context. For
example, engineering LES must contend with errors
and added dissipation arising from lower order
numerical methods. This is somewhat countered by
the higher values of subgrid kinetic energy in engine
LES. This is indicated by the fourth item in Table 1,
and is similar to the LES quality index introduced by
Pope [7]. Larger values of subgrid kinetic energy
mean that numerical dissipation is a smaller frac-
tion of the subgrid values and the relative impact of
numerical errors in engineering LES is potentially
less significant. However, this places more reliance
on the subgrid models. Generally, knowledgeable
users are able to incorporate these characteristics of
engineering LES into their interpretation of results
and analysis.
An example of how LES can be used in a CFD
code designed for engine applications is shown in
Fig. 3. This shows experimental, RANS, and LES
simulations of the Sandia Cummins direct injection
diesel engine. The RANS and LES simulations dupli-
cate the region of the experimental images using the
same coarse grid of a simple sector mesh common
in diesel engine simulations. The RANS results show
a broadened or smeared region for the higher tem-
perature, while the LES results show the same type
of jet large-scale structures seen in the experimental
images. Thus, with only a change to LES turbulence
and scalar mixing models that are appropriate for
applications, the simulation results pick up flow
processes that occur in the experiments that were
not previously available in the RANS simulations.
2.3 Expectations of LES for IC engines
In addition to the general expectations of LES listed
above, there are additional expectations related to
IC engine simulations. Generally, these can be
described as the ability to study new physical phe-
nomena in engines and an increased sensitivity to
design changes. These are discussed in more detail
in the following subsection.
2.3.1 Study new phenomena
A very important aspect of using LES for engines is
that it will allow studies of new phenomenon. There
are important aspects of engine flows and combus-
tion that are difficult, if not impossible, to address
with RANS but which are more amenable to LES
approaches. One of the primary features is cycle-to-
cycle variability. Reynolds Average Navier Stokes
uses models designed to capture the ensemble
averages. This results in higher turbulent viscosity
that almost always removes, or at least smears out,
the variation of in-cylinder flows and combustion
that coincide with cycle-to-cycle variability. Since
LES models are designed to filter out the smaller
scales and retain the larger scales, they are less dis-
sipative. The remaining large scales respond to the
non-linearities inherent in the Navier Stokes equa-
tions, and at least some aspects of cycle-to-cycle
variability can occur in the simulations. As dis-
cussed in section 4, several research groups are
Table 1 Characteristics of the primary types of LES studies
Scientific LES Engineering LES
Emphasis Study of fundamental topics Study of applications and practical devicesNumber of grid cells Very large; governed by access to very large
computing systemsModerate; governed by reasonable turnaround
Numerical methods High accuracy, typically spectral or at leasteighth-order finite difference
Engineering accuracy, typically first or second order
Fraction of kinetic energyresolved on grid
Very high; typically 95% or more Moderate; typically 60% to 80%
426 C J Rutland
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

already making use of LES to study cycle-to-cycle
variations.
2.3.2 Increased design sensitivity
In addition, there are other flow-based processes in
engines that are best addressed with LES rather than
RANS. For example, LES should be better at captur-
ing the impact of relatively small changes in geome-
try (combustion chamber shape, pistons bowls, port
design, valve curtain regions, etc.), small changes in
fuel injection angles for direct injection applica-
tions, and small changes in operation (spark timing,
injection timing, valve timing, etc.). These types of
applications could be classified as ‘design sensitiv-
ity’ studies. Similar to cycle-to-cycle variability
applications, LES is a necessary tool for these stud-
ies due to its increased sensitivity.
Even though LES represents the next generation
of turbulence modelling, it is not always the best
choice for engine applications. The primary and
very common situation in which RANS is still the
best choice is when the desired output is a cycle-
averaged result. Obtaining a cycle-averaged result
with LES requires running several consecutive full
720 crank-angle degree cycles and averaging the
results. This can be expensive since additional grid
preparation is required for the open portions of the
cycles and computer run times are long for the ten
or more cycles required. Several research groups are
pursuing this approach (see section 4). One justifi-
cation for this more computationally expensive
approach is that LES results are more accurate so
that the average is better than a RANS result. Still,
users should evaluate their objectives and choose
the best approach, either RANS or LES.
The other significant reason that LES is at a dis-
advantage for engine applications is that many addi-
tional complex physical processes occur.
Combustion and fuel injection are probably the pri-
mary complicating processes, and these are not tri-
vial. The use of LES for turbulent combusting flows
is still a very active area of fundamental research
with many basic issues still being investigated [16].
There has been even less work in LES for liquid
sprays where one could easily argue that the physi-
cal processes are even more complex. Beyond
sprays and combustion there are complex processes
in ignition, gas phase and solid phase emissions,
boundary layers and wall heat transfer, and moving
boundaries. All of these require some sort of model-
ling that should be adapted, or at least understood,
for the LES approach.
In many situations, researchers use LES for turbu-
lence (e.g. subgrid stresses that appear in the
momentum equation) and maybe for scalar flux
modelling, but then rely on existing RANS-type sub-
models for the other physical processes. This type of
hybrid approach is very common and a very reason-
able way to proceed. Waiting until all engine sub-
models have been adapted to LES is unreasonable
and disregards the advantages that can come from
intelligent use of hybrid approaches. Since turbu-
lence is the background for most aspects of engine
flows, using LES turbulence submodels can improve
the context for the other models. The turbulence
models provide flow fields with more large-scale
structures and greater sensitivity so that many
advantages of LES can be realized, even when com-
bined with RANS models for other processes. One
could argue that there is some justification in this
approach since RANS models for combustion and
sprays should respond correctly to the resolved
large-scale flow field [17]. However, the correct
response of RANS models to the LES flow field
is not guaranteed. A user should understand the
Fig. 3 Comparison of LES (middle row) and RANS(bottom row) with experimentally imaged (toprow) ignition chemiluminescence, showing liq-uid fuel in blue and temperature in green (seescale) (from [15], reprinted with permissionfrom SAE paper 2007-01-0163, � 2007, SAEInternational)
Large-eddy simulations for internal combustion engines – a review 427
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from
specifics of the hybrid situation being used so that
they can better evaluate the appropriateness of the
tools for the specific study and the validity of
the results. An even better approach is to examine
the various submodels and determine if they are
consistent with the LES spatial filtering concepts
and the resulting scaling.
This brings us to the main objective of this
review, which is to report on, evaluate, and categor-
ize the use of various LES turbulence, combustion,
spray, etc., models for IC engines. Since there are
many physical processes that need modelling, there
is a wide variety of hybrid approaches in the litera-
ture that may mix-and-match various models from
these lists. Examples from the literature will be used
to illustrate some of the main categories. Then,
these categories are used to describe and classify
some of the recent uses of LES to study engines.
3 LES MODELS IN IC ENGINES
There are many complex physical processes in IC
engines, and each of these requires some sort of
modelling. These processes occur in a turbulent gas
phase flow so turbulence models, also called turbu-
lence submodels, provide the context for the other
physical processes. In addition, LES submodels
should also be used for scalar mixing, combustion,
and fuel sprays since all of these can be significan-
tly impacted by the turbulent flows. Large-eddy
simulation modelling for turbulence and these
other engine processes are discussed in the sections
below. In each case, the major modelling app-
roaches are described and classified with an empha-
sis on their suitability for engine CFD. A table is
provided in each subsection to summarize the
descriptions.
3.1 Turbulence modelling
For a quick background on turbulence modelling,
one can start from the gradient assumption used in
equation (3), although as explained below, this is
not necessarily the best approach. From equation
(3), the turbulence model is based on a turbulence
viscosity, nT, and an expression for this term is
required. As a context for the LES approach, the
most common RANS-based models use the k–epsi-
lon (k–e) approach so that
nT = Cm
k2
e(5)
The terms k and e are interpreted to be the turbu-
lent kinetic energy (TKE) and the turbulent kinetic
energy dissipation rate (or just dissipation). In mod-
ern approaches, these terms are obtained from indi-
vidual transport equations. Thus, the RANS (k–e)
model is a two-equation turbulence model.
To provide additional understanding, it is useful
to rewrite the model based on a physical interpreta-
tion using a velocity and length scale
nT = u00‘ (6)
Then, k and e provide a turbulent velocity scale
u00e ffiffiffikp
and a turbulent length scale of ‘’ ek1.5/e. In
this interpretation, the length scale is thought of as
the integral scale of the turbulence even though the
flow is not homogeneous.
If equation (3) is used for LES models, there are
several approaches for obtaining expressions for nT.
One of the more common models is based on the
ideas of Smagorinsky [18] and results in
nT = CSDð Þ2 ~S�� �� (7)
where |~s| measures the magnitude of the resolved
strain rate and D is a measure of the grid cell size.
Using the same physical interpretation as above,
the Smagorinsky model velocity scale is u00~D|~s| and
the length scale is the numerical grid size, D. Using
the grid size for the length scale in LES is consistent
with the LES filtering using a grid cell scale (see
appendix 2). However, it is not guaranteed that grid
size times the strain rate gives the correct velocity
scale for the LES subgrid turbulence since this is
a crude model. Usually, there are no additional
transport equations in Smagorinsky-type models so
they are zero-equation models. Variations on the
Smagorinsky model are common, and these are
described in Table 2.
Within the turbulent viscosity approach to mod-
elling, the LES model length scale is related to the
grid cell size. This means that fundamentally LES is
not grid independent. As the grid cell size becomes
smaller, an LES solution should approach a DNS
solution. This limit is well accepted and usually rea-
lized by most LES models. In contrast, as the grid
cell sizes become larger, the limit is not well estab-
lished. One possible interpretation is that the LES
model length scale should approach a RANS model
integral scale. However, this is not observed in prac-
tice and, pragmatically, it is inadvisable to use LES
models on grids coarser than ones used in RANS.
Even though most turbulence models use some
form of equation (3), it can be argued that it is not
the best type of model for LES for three important
reasons.
428 C J Rutland
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from
1. Overly dissipative. As discussed in the previous
sections, this approach can be overly dissipative.
2. No subgrid kinetic energy. In equation (3) type
models for LES, the subgrid TKE is arbitrary. This
is because the trace of the subgrid stress tensor,
tii, is twice the kinetic energy, but the trace of the
strain rate tensor is zero in incompressible flows.
This is why equation (3) uses the anisotropic part
of the subgrid stress tensor, trij. In engine flows,
the subgrid kinetic energy is a very important
variable for additional models in combustion,
scalar mixing, and sprays. Thus, an additional
model must be formulated for the subgrid kinetic
energy. These models are commonly very simple,
ad hoc, and poorly justified [19].
3. Incorrect tensor relationship. Fundamentally,
equation (3) assumes the tensor relationship
bet-ween trij and is valid. Specifically, equation
(3) assumes the principle directions of trij and ~sij
align. This is known to be incorrect [14], and
indicates a basic problem with the Boussinesq
assumption embodied by equation (3). There
are LES models that do not use equation (3),
and these may offer advantages for LES in
engine applications. These are described in
appendix 4 and Table 2.
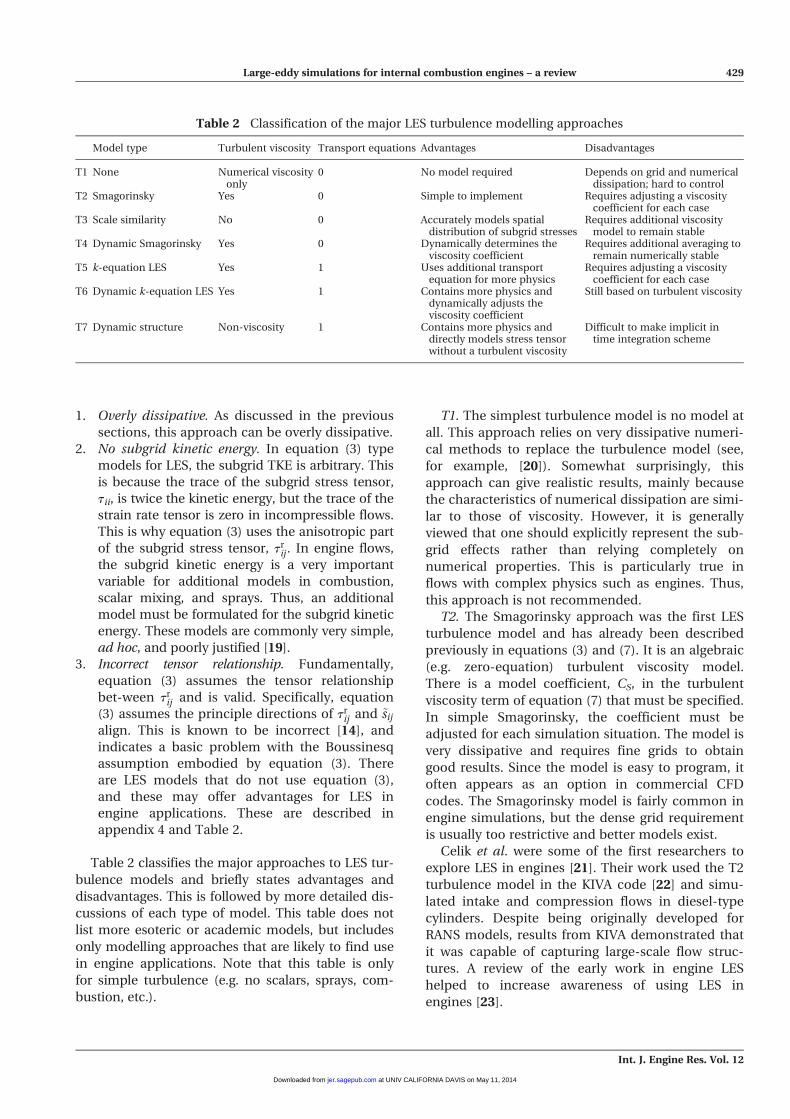
Table 2 classifies the major approaches to LES tur-
bulence models and briefly states advantages and
disadvantages. This is followed by more detailed dis-
cussions of each type of model. This table does not
list more esoteric or academic models, but includes
only modelling approaches that are likely to find use
in engine applications. Note that this table is only
for simple turbulence (e.g. no scalars, sprays, com-
bustion, etc.).
T1. The simplest turbulence model is no model at
all. This approach relies on very dissipative numeri-
cal methods to replace the turbulence model (see,
for example, [20]). Somewhat surprisingly, this
approach can give realistic results, mainly because
the characteristics of numerical dissipation are simi-
lar to those of viscosity. However, it is generally
viewed that one should explicitly represent the sub-
grid effects rather than relying completely on
numerical properties. This is particularly true in
flows with complex physics such as engines. Thus,
this approach is not recommended.
T2. The Smagorinsky approach was the first LES
turbulence model and has already been described
previously in equations (3) and (7). It is an algebraic
(e.g. zero-equation) turbulent viscosity model.
There is a model coefficient, CS, in the turbulent
viscosity term of equation (7) that must be specified.
In simple Smagorinsky, the coefficient must be
adjusted for each simulation situation. The model is
very dissipative and requires fine grids to obtain
good results. Since the model is easy to program, it
often appears as an option in commercial CFD
codes. The Smagorinsky model is fairly common in
engine simulations, but the dense grid requirement
is usually too restrictive and better models exist.
Celik et al. were some of the first researchers to
explore LES in engines [21]. Their work used the T2
turbulence model in the KIVA code [22] and simu-
lated intake and compression flows in diesel-type
cylinders. Despite being originally developed for
RANS models, results from KIVA demonstrated that
it was capable of capturing large-scale flow struc-
tures. A review of the early work in engine LES
helped to increase awareness of using LES in
engines [23].
Table 2 Classification of the major LES turbulence modelling approaches
Model type Turbulent viscosity Transport equations Advantages Disadvantages
T1 None Numerical viscosityonly
0 No model required Depends on grid and numericaldissipation; hard to control
T2 Smagorinsky Yes 0 Simple to implement Requires adjusting a viscositycoefficient for each case
T3 Scale similarity No 0 Accurately models spatialdistribution of subgrid stresses
Requires additional viscositymodel to remain stable
T4 Dynamic Smagorinsky Yes 0 Dynamically determines theviscosity coefficient
Requires additional averaging toremain numerically stable
T5 k-equation LES Yes 1 Uses additional transportequation for more physics
Requires adjusting a viscositycoefficient for each case
T6 Dynamic k-equation LES Yes 1 Contains more physics anddynamically adjusts theviscosity coefficient
Still based on turbulent viscosity
T7 Dynamic structure Non-viscosity 1 Contains more physics anddirectly models stress tensorwithout a turbulent viscosity
Difficult to make implicit intime integration scheme
Large-eddy simulations for internal combustion engines – a review 429
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

An additional variation associated with T2 type
models was developed by Nicoud and Ducros [24]
and called wall adapting local eddy (WALE) viscos-
ity. This replaces the strain rate magnitude in the
turbulent viscosity in equation (7) by a more com-
plex tensor contraction of the strain rate and velo-
city gradient tensor. There is some indication WALE
has better near-wall performance so that grid
requirements can be reduced, but this needs further
investigation. Poinsot, with a variety of other
researchers, has used WALE with non-engine flows
in the development of a new code for engine appli-
cations [25, 26]. Bianchi et al. have shown good
results with WALE in engine flows with a detailed
analysis of flow around the intake valves [27, 28].
T3. The scale-similarity modelling approach was
originally proposed by Bardina et al. [29], and is
explained in more depth by Meneveau and Katz
[30]. The concept is that unresolved subgrid scales
can be approximated by the smallest resolved
scales. In other words, the best way to represent
subgrid scales is with the next largest scales. This
approach is implemented by using an additional
spatial filtering operation on the already filtered
scales. The additional filtering may be called a test
filter in some approaches and is indicated by an
additional overbar-type symbol (see appendix 3).
Scale-similarity is an important concept in LES
and does not occur in RANS modelling. The original
approach is usually unstable, mainly because it is
not a viscosity model and does not use an energy
budget to track the subgrid kinetic energy. Thus, the
scale-similarity model is usually augmented by the
addition of a Smagorinsky term in what is termed a
hybrid model.
The Lund University group has been exploring
LES for engines for several years using a scale-simi-
larity model for turbulence. A lot of their work is
focused on homogeneous charge compression igni-
tion (HCCI) combustion, and is reviewed in section
4. They worked with Paul Miles from the
Combustion Research Facility at Sandia National
Labs to make detailed comparisons of motored in-
cylinder velocity fields [31]. They used dense grids,
and the comparisons between the LES and the PIV
are reasonable. Interestingly, the work demonstrates
the difficulty in validating the LES.
T4. A major improvement in the Smagorinsky
approach occurred when the dynamic approach
was developed by Germano et al. [11]. In this
approach, the adjustable coefficient, Cs, in equation
(7) is obtained using the dynamic procedure. The
dynamic procedure uses the scale-similarity con-
cept of T3 that requires an additional spatial filter-
ing step. The dynamic coefficient is found from the
difference between these additionally filtered quan-
tities and the base quantities calculated on the CFD
grid (see appendix 3). This additional filtering oper-
ation is a modest increase in computational cost,
resulting in an increase of ~20 per cent for a simple
turbulent flow.
An interesting variation of the dynamic procedure
was developed by Meneveau et al. [32], in which a
Lagrangian concept was used to develop the model
coefficient. The idea was to average over fluid parti-
cle pathlines to improve accuracy. In practice, two
additional transport equations were used to repre-
sent the Lagrangian average of terms used to evalu-
ate the dynamic coefficient.
Haworth et al. were also some of the early
explorers in using LES for IC engines [33]. They
mostly used T2 and T4 type models in several differ-
ent codes. They carried out extensive studies on a
simple, engine type flow with a stationary valve [34].
This configuration, sometimes called the Imperial
College engine, has a large experimental dataset and
is useful for validating valve flows. Haworth et al.
have shown good comparison between ensemble
averaged LES models and experimental data for
both mean and fluctuating velocity profiles at differ-
ent locations and different crank angles.
The dynamic procedure is very powerful and can
be used in many situations to find modelling coeffi-
cients. When used with the Smagorinsky model, the
results are reasonably good for non-reacting flows.
However, dense grids are required and often an
additional averaging must be used to avoid instabil-
ities that arise from negative viscosities. Despite the
improvements found in T4, it still retains the draw-
backs of the equation (3) viscosity models discussed
in the previous section. No matter how good a
model is formulated for the turbulent viscosity, the
fundamentals of T2 and T4 are very weak.
T5. The k-equation approach is a practical viscos-
ity-based, one-equation LES model. It was originally
developed for atmospheric flows [35], and is still
common in that field. Some of the first useful
k-equation models for engineering flows were devel-
oped by Kim and Menon [36]. This model was still
viscosity based (equation (3)), but now the turbulent
viscosity was formed from the subgrid TKE, ksgs, and
a grid length scale, D, resulting in the following
expression
nT = CkD
ffiffiffiffiffiffiffiffiksgs
q(8)
The subgrid TKE was obtained from an additional
transport equation that was readily derived from the
basic equations. The use of the k transport equation
430 C J Rutland
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

has several distinct advantages. First, it incorpo-
rates more physical processes, such as the convec-
tion, production, and dissipation of subgrid kinetic
energy. Second, the subgrid kinetic energy provides
a velocity scaling that can be used in other models,
such as combustion, scalar transport, and sprays.
Third, models that use a subgrid k-equation provide
a better model for the subgrid stresses and thus
work better on the coarser grids commonly found in
engine CFD [37, 38].
Menon et al. have applied the T5 turbulence
model to engine flows with good results [39].
Bianchi et al. have performed careful studies of LES
models for engine type flows in simple configura-
tions. For example, they have compared T2 and T5
turbulence models with RANS results for a station-
ary valve, steady flow bench configuration [28].
The subgrid kinetic energy equation is fairly sim-
ple to implement. It requires only one additional
major modelled term, which is for the dissipation of
subgrid kinetic energy. Fortunately, this term plays
its proper role in LES, which at the subgrid scale is
to remove kinetic energy. The dissipation term is
not required to provide the mean value for all scales,
nor is it used to obtain length scales or time scales
as it is in RANS modelling. Thus, dissipation model-
ling is much less critical, and simple models seem
to work well.
T6. The k-equation LES models have also been
implemented using the dynamic procedure to
obtain a better, local value for the coefficient in
equation (8) [36]. This method is a logical extension
of T5; however, additional implementation details
must be observed to maintain stability. At this time,
it is not clear if this additional complexity beyond
the basic T5 model is useful in engine simulations.
T7. A recent development in LES turbulence mod-
els is the dynamic structure approach developed by
Pomraning and Rutland [40] and Chumakov and
Rutland [41]. In this approach, a turbulent viscosity
is not used. Instead, a tensor coefficient is obtained
directly from the dynamic procedure. This tensor
coefficient is multiplied by the TKE that is obtained
from a transport equation (see appendix 4 for more
details). The resulting dynamic structure model is
tij = Cijksgs (9)
An important major aspect of the dynamic structure
approach is that there is no turbulent viscosity.
Thus, it is not a purely dissipative model. Instead, a
budget of TKE is maintained between the grid scale
velocity field and the subgrid k-equation. In other
words, energy removed from the grid scales
goes into the subgrid kinetic energy. Then, within
the k-equation, a viscous dissipation term removes
the energy through molecular viscosity. Detailed a
priori and a posteriori testing of the model has
shown it performs well in rotating turbulence in
which energy is transferred accurately from small to
large scales, a process that is similar to that occur-
ring in sprays and combustion systems [12, 42].
The model was developed for practical applica-
tions, especially IC engines, in which the number of
grid cells must remain reasonable. The model works
very well in engine applications, and provides a
good model for the subgrid TKE for use in combus-
tion, scalar mixing, and spray models. The T7
approach has been used for diesel engine simula-
tions with good results [15, 43, 44].
3.1.1 Turbulence: additional considerations
Wall boundary conditions. Wall boundary condi-
tions for LES submodels are not very well devel-
oped. There has been continued effort is this area
for several years (e.g. Kannepalli and Piomelli [45]
and Chang et al. [46]), but, to date, no significant
progress has been made on practical models for
CFD applications. Some promising advanced work
by Cabot and Moin [47] used RANS models with
additional consideration for unsteadiness and ‘ejec-
tion’ events. However, these have only been used on
simple channel flows and will probably require
much more additional testing before they can be
used with confidence in applications. More recently
Piomelli [48] has reviewed the status of wall model-
ling for LES, and Frohlich and von Terzi [49] dis-
cussed combining LES with RANS wall models.
Thus, most LES simulations use one of two
approaches for wall boundary conditions: (a) no
special treatment of the wall, except for additional
grid points (Kannepalli and Piomelli [45]), and (b)
wall-layer models essentially the same as used in
RANS that have been shown, by Rodi et al. [50], to
give reasonably good results. For engine applica-
tions, the use of wall functions is probably the best
approach for the near future. This is especially true
when one considers wall heat transfer for which
there has been essentially no work on engines for
LES specific wall models.
Higher order numerics. In simulations that are
less focused on applications and more focused on
generic flows, such as channels and isotropic turbu-
lence, numerical accuracy is an important issue
[51]. The concern is that numerical errors could be
of the same order as the LES modelled terms. The
generic flows commonly use higher order spatial
numerics, typically fourth order or higher. In addi-
tion to being higher order, the methods have low
Large-eddy simulations for internal combustion engines – a review 431
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from
dispersion and dissipation errors. This is possible
because the computational domains are simple and
the grids allow easy implementation of higher order
numerics. In contrast, applications such as IC
engines commonly have complex grids and it is very
difficult to achieve anything higher than second-
order spatial accuracy. This should not and has not
deterred the use of LES to achieve better results in
engine applications.
There has been encouraging work by the group at
Doshisha University to improve the numerical accu-
racy in the KIVA engine applications code [52, 53].
This work correctly focuses on the advection or con-
vection term in the momentum equation and has
compared several numerical methods, including
one that is up to third-order accurate. The results
are encouraging, but have only been demonstrated
on simple grids in the engine code and have not
been demonstrated on grids for actual engine
configurations.
Another tactic for higher order accuracy is being
used by Poinsot et al. at IFP and CERFACS, in which
an existing LES code developed for aeronautical
applications is being adapted for IC engines [25,
54]. The code is known as AVBP, and has second-
order time accuracy and third-order spatial accu-
racy on the convection terms. The time integration
scheme is explicit, which offers higher accuracy
than an implicit scheme since the time step is
restricted to smaller values. Adaption for engines is
not straightforward, but moving mesh algorithms
have been implemented; however, grid removal
does not seem to be included yet. The code is being
carefully tested and is showing good results for
engine applications [55].
Compressibility effects. Even though the gas den-
sity varies significantly in engines, they are generally
considered low Mach number regimes [56]. Thus,
pressure wave effects on turbulence modelling are
almost never considered. The exception is when
engine knock or extremely rapid ignition occurs.
While some HCCI operation is similar to knock, it
can be considered a different mechanism that is
probably not a consequence of pressure waves in
most cases. There are many RANS-based studies of
knock (see, for example, [57]) but there does not
appear to be any LES studies yet. This will probably
change before long as ‘mega knock’ in downsized
[58] or direct injection gasoline engines is studied.
Open boundary conditions. Many engine studies
are focused on the closed portion of the cycle and
thus avoid open boundaries. However, as multicycle
simulations become more common to study topics
such as cycle-to-cycle variability, inflow and outflow
boundary conditions must be considered. It is not
always clear what information should be specified
on the boundaries to achieve accurate simulations.
One LES study found that boundary flow perturba-
tions can have a significant impact on combustion
[59]. This topic needs additional study, and it is
likely that the type of engine, the specific models
being used, and the focus of the investigation will
have an impact on what boundary conditions are
required.
3.1.2 Turbulence: recommendations
1. The use of LES for basic turbulence modelling in
applications is becoming better established and
can be used for engine CFD with the appropriate
models.
2. The most common LES models use simple visc-
osity formulations (T2, T4) and do not take
advantage of LES concepts. They require high
grid resolution, which can be achieved using
highly parallel codes.
3. The more advanced differential LES turbulence
models (T5–T7) should be used. These do not
require extremely fine grids and work well on
the grids commonly found in engine
applications.
4. Models that use a subgrid TKE, ksgs, are well sui-
ted to engines because this term can be used in
modelling combustion, scalar mixing, and
sprays.
3.2 Combustion modelling
The phrase ‘combustion modelling’ refers to model-
ling the chemical reaction rate terms in the energy
and species conversation equations. Often, these
models incorporate additional transport equations
for mixture fraction or flame surface expressions.
These additional equations may require additional
models for terms such as scalar dissipation or tur-
bulent flame speeds. Combustion modelling is a
complex and evolving field. Readers should consult
reviews by Pitsch [16], Menon [60], Veynante and
Vervish [61], Hilbert et al. [62], and the book by
Poinsot and Veynante [8] for detailed background
information. In this section, the major combustion
models that are used or have potential application
for IC engine CFD are classified and briefly
described.
In almost all cases, the combustion models are
essentially RANS models that have been or could be
adapted for use in LES. This approach clearly treats
LES as an evolution of RANS modelling and seems
432 C J Rutland
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

to work well. The combustion models benefit from
the LES flow field and scalar mixing models. In
addition, as noted by Kempf et al. [17], the RANS
formulations, though originally based on ensemble
averaging, may still be appropriate for LES-based
spatial averaging and respond correctly to the
LES flow field. However, the best approach is to re-
evaluate the models and make appropriate modifi-
cations to be consistent with the LES approach. This
adaptation may be as simple as adjusting coeffi-
cients within the original RANS model. Or they may
be more complex and require reformulation of the
expressions to be consistent with the time scales
that are available from the LES turbulence and mix-
ing models. For example, specific LES formulations
of scalar dissipation models may be required in
mixture-fraction-based combustion models (see, for
example, [63]).
Table 3 classifies and briefly describes the major
approaches to combustion modelling that have
either been used or could be used for engine CFD.
Some of the models have been grouped into families
with specific approaches listed as subcategories.
C1. The direct integration approach is also called
the mean-flow approach since reaction terms are
evaluated using the grid scale (e.g. filtered) tempera-
ture and species. These do not account for subgrid
mixing effects, so they are best suited for more
homogeneous flows and detailed chemical kinetic
schemes. Alternatively, direct integration is suitable
for dense grids when the subgrid values are
Gaussian with small variance. This approach has
proven to be very successful for studying low-
temperature combustion (LTC) approaches such as
HCCI. For example, Reitz and his group have suc-
cessfully applied C1 modelling for RANS modelling
in direct injection and homogeneous charged LTC
diesel engine studies [64], gasoline direct injection
engines [65], and in similar dual-fuel combustion
strategies [66]. The approach has also been used
Table 3 List of major combustion modelling approaches that have potential for use in LES.
Original or primary type of combustion for each model is indicated by Mode in column
2: H for homogeneous, P for premixed, D for diffusion
Model type Mode Advantages Disadvantages
C1 Direct Integration‘CHEMKIN’ or other stiff ODE integrators H Uses detailed kinetic mechanisms;
no special modelling requiredIgnores subgrid turbulence effects.
Better suited for homogeneouscombustion. Computationallyexpensive
C2 Blended modelsRIF D Better computational efficiency for
detailed chemistry. Uses flameletconcepts to model subgrid mixing(method C4d)
Not really a CFD method since themodel is not applied to each grid cell
C3 Time-scale models(a) Magnusson D Simple; uses both kinetic and
turbulent time scalesRequires using same time scales for all
reactions within individual grid cells(b) CTC D Improves on Magnusson by
integrating towards currentequilibrium state
Still requires same time scales
C4 Transport-equation models Flamelet approaches. Soundmathematical descriptions
Transport equations require modellingof scalar flux, source terms, and sinkterms
(a) Progress variable – C P, D Sound modelling of turbulenceeffects on flame front
No detailed chemistry. Better suited forhigh Reynolds number flows.Requires high grid resolution toresolve flame
(b) Level set – G-equation P, D Similar to C4a for premixed flames.Diminishes grid resolutionrequirements
Not suited for detailed chemistry.Requires model for turbulent flamespeed
(c) Flame surface area density – S P, D Similar to G-equation approach(C4b) but uses the flame area for amore physical description
(similar to C4b)
(d) Mixture fraction – Z D Can incorporate detailed chemistrythrough flamelet library. Usesprescribed PDF to model subgridmixing effects
Requires flows with fast chemical timesscales (high Da number) unlessunsteady effects are incorporated
(e) Conditional moment closure D Tries to improve on mixturefraction models (C5d) by usingvalues from the reaction zone
Increased complexity due to moreterms that require modelling
C5 PDF transport all Provides direct closure withoutmodels for reaction terms
Complex; Monte Carlo method;requires phase space mixing model
Large-eddy simulations for internal combustion engines – a review 433
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

successfully in LES applications using the T7 turbu-
lence model for direct injection diesel LTC studies
by Rutland and his group [15, 43, 44].
The C1 approach requires detailed chemical
kinetic mechanisms to be successful in engines, and
this usually results in very large computational run
times. Progress in improving run times is being
achieved by improved load balancing in parallel
computing environments [67]. Additional run-time
improvements are being achieved by applying
advanced numerical techniques such as cell cluster-
ing and analytical Jacobians [68] or precomputed,
tabulated results from detailed chemistry calcula-
tions [69, 70]. These methods are computationally
efficient, but may require close monitoring of
approximation errors, especially for ignition and
other situations where results are sensitive to kinetic
details.
C2. In an attempt to incorporate more detailed
chemical kinetics but without the computational
penalty, Peters’ group have developed the represen-
tative interactive flamelet (RIF) model [71–74].
Individual ‘flamelets’ that represent the main com-
bustion process are tracked using a Lagrangian
method through the domain. The approach can be
calibrated to work with conventional diesel combus-
tion and provide detailed chemistry for emissions.
However, the approach has difficulty with more
homogeneous flows, wall heat transfer, multiple fuel
injection operation, and spatially non-uniform
mixing that can occur in different regions of the
combustion chamber. Additional flamelets are
sometimes added to help address these issues, and
the method begins to resemble the cell clustering
approach used in C1 models. Combustion is tracked
by the Lagrangian flamelets rather than the pro-
cesses within each CFD grid cell. The approach is
more of a blending between a CFD flow model and
a system level heat-release model. Since it is not
clear how a representative flamelet concept is con-
sistent with the LES spatial filtering approach, the
RIF approach is not recommended for LES.
C3. For RANS applications, the time-scale
approach was originally developed for spark ignition
engines (Abraham et al. [75]) and later adapted for
diesel engines (Kong and Reitz [76]). The character-
istic time-scale (CTC) model is a very practical
approach that can give good results when experi-
mental data are available to adjust coefficients. The
CTC model is an outgrowth of the less commonly
used Magnusson type approaches, but is more
advanced in that CTC drives species concentrations
to a specified value. This specified value is com-
monly the local equilibrium value. However, in
some models this specified value is obtained from a
strained laminar flamelet solution (see, for example,
Rao and Rutland [77]). This effectively combines the
flamelet-prescribed PDF approach (C4d) with the
time-scale approach and has been used successfully
with LES turbulence models in diesel engine simula-
tions [78].
C4a. The flame-sheet approximation for premixed
flames has been developed in two formulations: the
C-equation and the G-equation approaches origi-
nally developed by Bray [79] and Kerstein et al. [80],
respectively. However, as shown by Zimont [81], the
approaches are very similar. In the C-equation
approach, the RANS flame brush is represented by
a progress variable C (commonly normalized
temperature). This flame-sheet approach has been
extended by Zimont et al. [82] for RANS
simulations.
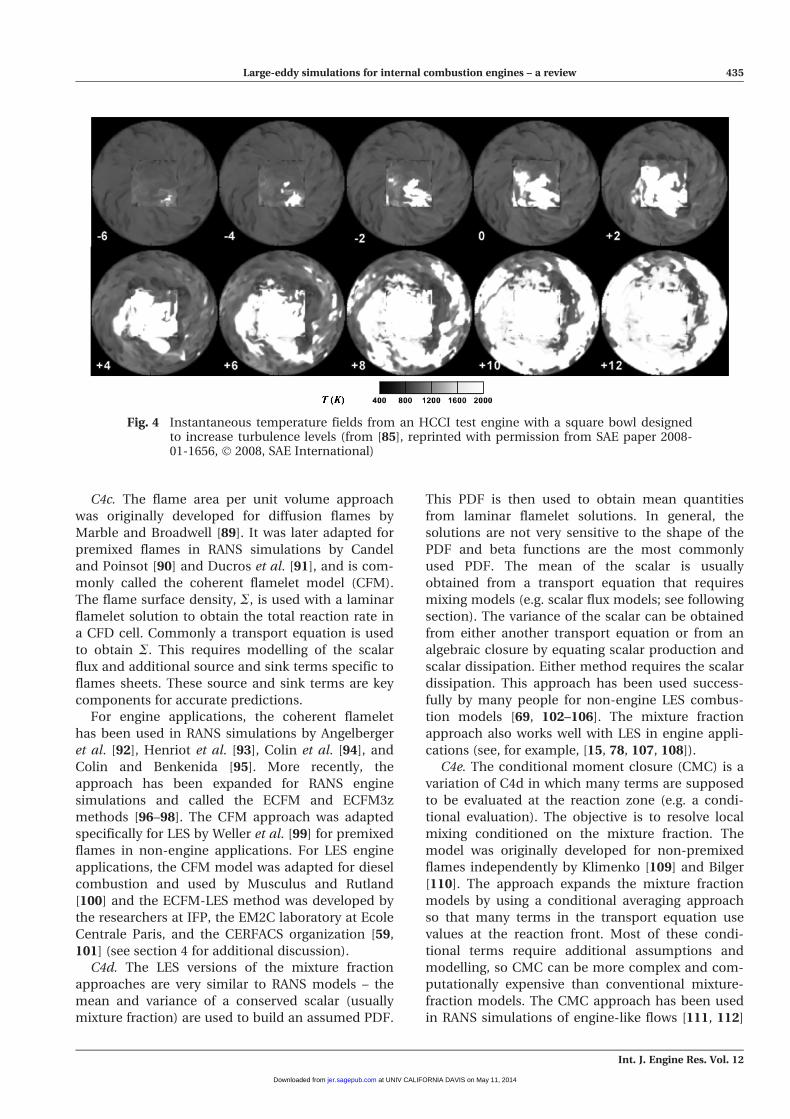
The group at the Lund University has published
a series of papers using a progress variable
approach with a very highly resolved T2 turbulence
model [31, 83–85]. Their work was focused on
understanding HCCI and they achieved good com-
parisons with experimental pressure traces.
Figure 4 shows an example from one of their LES
simulations. Additional discussion of their work
appears in section 4.
The adaptation of the C progress variable model
for LES has shifted away from the RANS moment-
based approaches towards a simpler formulation
called the thickened flame model [86]. This is a sim-
ple concept that artificially increases the flame
thickness and is motivated by reducing the com-
putational time used in the combustion model.
This allows denser grids and more resolved scale
motions that work well with the thickened flame.
Researchers in France have made good use of this
approach in LES and have simulated multiple cycles
of a spark ignited premixed charge compression
ignition (PCCI) engine [55].
C4b. The G-equation approach uses a continuous
variable, G, but assumes that a specific line of con-
stant G represents the flame front. It is a level-set,
kinematically based approach and is extended to
combustion only by the concept of a flame sheet.
The function G evolves by a standard transport
equation that requires models for the subgrid sca-
lar flux. This approach is being developed for RANS
simulations (see summary in Peters [87]). It also
shows some promise for use in LES simula-
tions of premixed flames [88]. More recently the
G-equation approach has been formulated for dif-
fusion flames and used in diesel engine simulations
by Yang and Reitz [65]. These simulations use
RANS modelling, but the extension to LES should
be straightforward.
434 C J Rutland
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from
C4c. The flame area per unit volume approach
was originally developed for diffusion flames by
Marble and Broadwell [89]. It was later adapted for
premixed flames in RANS simulations by Candel
and Poinsot [90] and Ducros et al. [91], and is com-
monly called the coherent flamelet model (CFM).
The flame surface density, S, is used with a laminar
flamelet solution to obtain the total reaction rate in
a CFD cell. Commonly a transport equation is used
to obtain S. This requires modelling of the scalar
flux and additional source and sink terms specific to
flames sheets. These source and sink terms are key
components for accurate predictions.
For engine applications, the coherent flamelet
has been used in RANS simulations by Angelberger
et al. [92], Henriot et al. [93], Colin et al. [94], and
Colin and Benkenida [95]. More recently, the
approach has been expanded for RANS engine
simulations and called the ECFM and ECFM3z
methods [96–98]. The CFM approach was adapted
specifically for LES by Weller et al. [99] for premixed
flames in non-engine applications. For LES engine
applications, the CFM model was adapted for diesel
combustion and used by Musculus and Rutland
[100] and the ECFM-LES method was developed by
the researchers at IFP, the EM2C laboratory at Ecole
Centrale Paris, and the CERFACS organization [59,
101] (see section 4 for additional discussion).
C4d. The LES versions of the mixture fraction
approaches are very similar to RANS models – the
mean and variance of a conserved scalar (usually
mixture fraction) are used to build an assumed PDF.
This PDF is then used to obtain mean quantities
from laminar flamelet solutions. In general, the
solutions are not very sensitive to the shape of the
PDF and beta functions are the most commonly
used PDF. The mean of the scalar is usually
obtained from a transport equation that requires
mixing models (e.g. scalar flux models; see following
section). The variance of the scalar can be obtained
from either another transport equation or from an
algebraic closure by equating scalar production and
scalar dissipation. Either method requires the scalar
dissipation. This approach has been used success-
fully by many people for non-engine LES combus-
tion models [69, 102–106]. The mixture fraction
approach also works well with LES in engine appli-
cations (see, for example, [15, 78, 107, 108]).
C4e. The conditional moment closure (CMC) is a
variation of C4d in which many terms are supposed
to be evaluated at the reaction zone (e.g. a condi-
tional evaluation). The objective is to resolve local
mixing conditioned on the mixture fraction. The
model was originally developed for non-premixed
flames independently by Klimenko [109] and Bilger
[110]. The approach expands the mixture fraction
models by using a conditional averaging approach
so that many terms in the transport equation use
values at the reaction front. Most of these condi-
tional terms require additional assumptions and
modelling, so CMC can be more complex and com-
putationally expensive than conventional mixture-
fraction models. The CMC approach has been used
in RANS simulations of engine-like flows [111, 112]
Fig. 4 Instantaneous temperature fields from an HCCI test engine with a square bowl designedto increase turbulence levels (from [85], reprinted with permission from SAE paper 2008-01-1656, � 2008, SAE International)
Large-eddy simulations for internal combustion engines – a review 435
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

and in diesel engines [113]. The CMC approach has
been adapted to LES for non-engine flows (see, for
example, Steiner and Bushe [114]), but it is not
straightforward, as shown by Triantafyllidis and
Mastorakos [115]. Generally, results with CMC are
usually slightly better than a typical C4d model.
However, the CMC complexity and lack of general
experience that comes from wider use indicate that
the approach still needs development for use in LES
of complex engine flows.
C5. An additional combustion modelling
approach is based on the PDF evolution equation
models. The approach is often referred to as the
‘transported PDF’ approach as opposed to the ‘pre-
sumed PDF’ approach in C4d and C4e. The theory
was originally developed by Pope [116], primarily
for RANS environments. A recent review of this
method by Haworth [117] provides detailed infor-
mation about the physics, mathematics, and
numerical details of this approach, including a sec-
tion on its use for engines. This is a complex
approach using Monte-Carlo methods to track the
evolution of the underlying PDFs that describe the
thermal and, in some cases, velocity fields. The pri-
mary advantage of the approach is that it does not
require any additional models for the chemical reac-
tion terms. However, it does require models for sub-
grid turbulence and phase space mixing. The
method is so different from the other approaches
discussed here that some users find it difficult to
use. Since it is a statistical approach, the method
can require long CPU run times. However,
Subramaniam and Haworth [118] and Kung and
Haworth [119] are actively developing the method
for IC engine application and are achieving good
results in RANS simulations. There is little LES work
with the transported PDF approach and there does
not appear to be any published applications of the
models to LES engine simulations to date.
3.2.1 Combustion: additional considerations
Time scales. Combustion models in LES require
good models for mixing of species and/or thermal
energy. Large-eddy simulation is well suited to pro-
vide better mixing information in support of com-
bustion models, especially at the grid scale. At the
subgrid scale, combustion models require time-
scale information in one form or another (mixing
times, scalar dissipation, kinetic times, etc.).
Currently, LES models are less well suited to this
task because there has been less development on
models that provide this information. Often, subgrid
time-scale information is obtained from turbulent
viscosity and local mean gradients, but this is based
on RANS concepts. The newer one-equation turbu-
lence models (T5, T6, T7) are better at providing
time-scale information because they track the sub-
grid kinetic energy ksgs using a transport equation.
This can be combined with length scales (gradients
or filter length scales) to provide time scales to com-
bustion models.
Multimode combustion. In some engine appli-
cations, combustion does not easily fall into the
traditional classifications of premixed mode or
non-premixed mode. Or combustion may occur in
multiple modes within a cycle. Examples are direct
injection gasoline technologies and some of the
newer LTC technologies such as partially PCCI.
These types of combustion processes are probably
best described by combinations of direct integration
for ignition (C1), premixed and partially premixed
combustion for early, more highly mixed processes
(C3, C4a–c), and mixing controlled combustion for
later processes (C4d–e). These multimode opera-
tions can occur in a time sequence, or simultane-
ously, but in different regions in the combustion
chamber, or some combination of these two situa-
tions. A combination C4a and C4d model for non-
engine LES was reported by Ihme and Pitsch [120].
For engine applications, hybrid approaches have
been explored for RANS diesel applications [107]
and premixed/diffusion combustion in the ECFM3Z
model [95]. More recent work has demonstrated
LES simulations of diesel engine simulations using a
combination of C1, C3b, and C4d combustion mod-
els with a T7 turbulence model [15, 44].
The difficulty with multimode approaches is des-
ignating and accurately evaluating the best para-
meters for switching between the modes.
Commonly, these parameters measure a mixing
state (for example scalar dissipation rate), relative
timescales (Damkohler or Karlovitz numbers), or
reaction progress (for example, reaction products or
normalized temperature). Currently, there is not a
good theoretical framework for determining the
switching parameters, so they are often developed
based on physical arguments. In addition, the
switching procedure and the value at which
the switch occurs may have a greater impact on the
results than the details of the individual combustion
models. Clearly, much more work needs to be done
in this area for both RANS and LES modelling.
3.2.2 Combustion: recommendations
1. Use transport-based combustion models (C4).
The transport equations in these models benefit
436 C J Rutland
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from
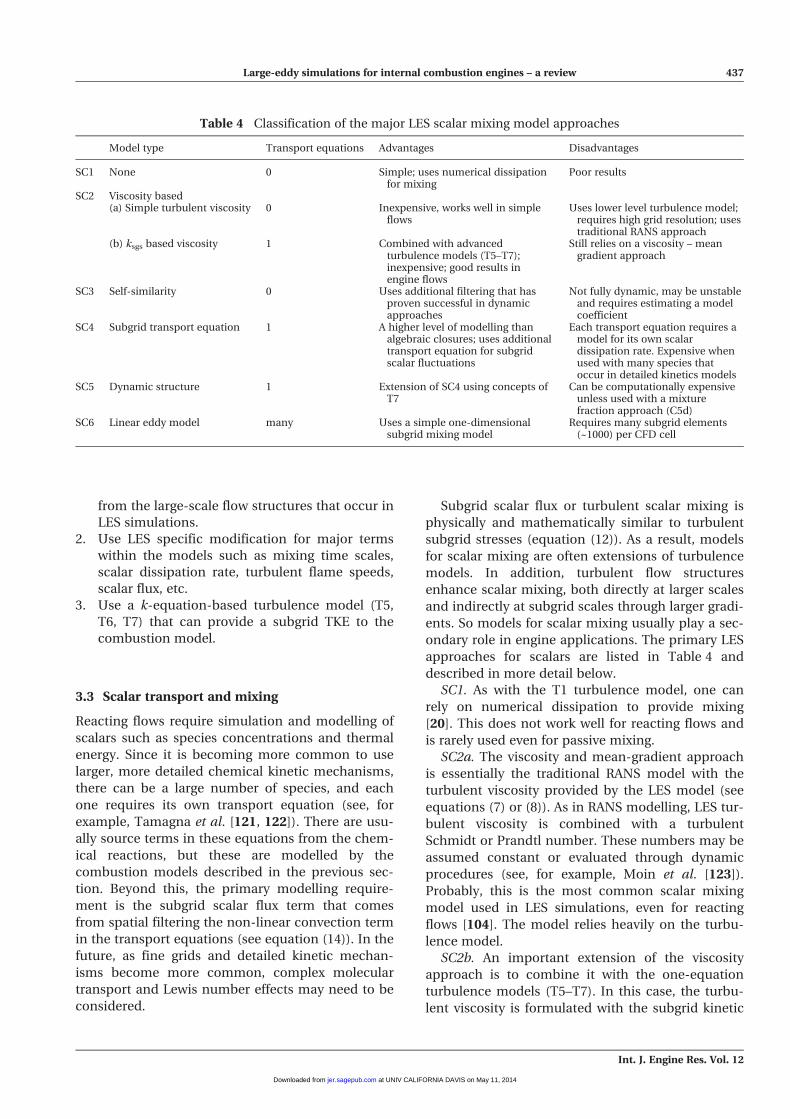
from the large-scale flow structures that occur in
LES simulations.
2. Use LES specific modification for major terms
within the models such as mixing time scales,
scalar dissipation rate, turbulent flame speeds,
scalar flux, etc.
3. Use a k-equation-based turbulence model (T5,
T6, T7) that can provide a subgrid TKE to the
combustion model.
3.3 Scalar transport and mixing
Reacting flows require simulation and modelling of
scalars such as species concentrations and thermal
energy. Since it is becoming more common to use
larger, more detailed chemical kinetic mechanisms,
there can be a large number of species, and each
one requires its own transport equation (see, for
example, Tamagna et al. [121, 122]). There are usu-
ally source terms in these equations from the chem-
ical reactions, but these are modelled by the
combustion models described in the previous sec-
tion. Beyond this, the primary modelling require-
ment is the subgrid scalar flux term that comes
from spatial filtering the non-linear convection term
in the transport equations (see equation (14)). In the
future, as fine grids and detailed kinetic mechan-
isms become more common, complex molecular
transport and Lewis number effects may need to be
considered.
Subgrid scalar flux or turbulent scalar mixing is
physically and mathematically similar to turbulent
subgrid stresses (equation (12)). As a result, models
for scalar mixing are often extensions of turbulence
models. In addition, turbulent flow structures
enhance scalar mixing, both directly at larger scales
and indirectly at subgrid scales through larger gradi-
ents. So models for scalar mixing usually play a sec-
ondary role in engine applications. The primary LES
approaches for scalars are listed in Table 4 and
described in more detail below.
SC1. As with the T1 turbulence model, one can
rely on numerical dissipation to provide mixing
[20]. This does not work well for reacting flows and
is rarely used even for passive mixing.
SC2a. The viscosity and mean-gradient approach
is essentially the traditional RANS model with the
turbulent viscosity provided by the LES model (see
equations (7) or (8)). As in RANS modelling, LES tur-
bulent viscosity is combined with a turbulent
Schmidt or Prandtl number. These numbers may be
assumed constant or evaluated through dynamic
procedures (see, for example, Moin et al. [123]).
Probably, this is the most common scalar mixing
model used in LES simulations, even for reacting
flows [104]. The model relies heavily on the turbu-
lence model.
SC2b. An important extension of the viscosity
approach is to combine it with the one-equation
turbulence models (T5–T7). In this case, the turbu-
lent viscosity is formulated with the subgrid kinetic
Table 4 Classification of the major LES scalar mixing model approaches
Model type Transport equations Advantages Disadvantages
SC1 None 0 Simple; uses numerical dissipationfor mixing
Poor results
SC2 Viscosity based(a) Simple turbulent viscosity 0 Inexpensive, works well in simple
flowsUses lower level turbulence model;
requires high grid resolution; usestraditional RANS approach
(b) ksgs based viscosity 1 Combined with advancedturbulence models (T5–T7);inexpensive; good results inengine flows
Still relies on a viscosity – meangradient approach
SC3 Self-similarity 0 Uses additional filtering that hasproven successful in dynamicapproaches
Not fully dynamic, may be unstableand requires estimating a modelcoefficient
SC4 Subgrid transport equation 1 A higher level of modelling thanalgebraic closures; uses additionaltransport equation for subgridscalar fluctuations
Each transport equation requires amodel for its own scalardissipation rate. Expensive whenused with many species thatoccur in detailed kinetics models
SC5 Dynamic structure 1 Extension of SC4 using concepts ofT7
Can be computationally expensiveunless used with a mixturefraction approach (C5d)
SC6 Linear eddy model many Uses a simple one-dimensionalsubgrid mixing model
Requires many subgrid elements(~1000) per CFD cell
Large-eddy simulations for internal combustion engines – a review 437
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

energy (equation (8)) and combined with a turbu-
lent Schmidt or Prandtl number. This approach is
used with LES in IC engine applications [15]. It pro-
vides good results at reasonable computational
expense. This is primarily because it is combined
with advanced turbulence models T5–T7.
SC3. Scale-similarity models are based on the
same concepts that underlie many of the turbulence
models (T3, T4, T6, T7, and appendix 3). Thus, this
approach has the potential to be very accurate. This
has been demonstrated by Moin and others [103,
123] from comparison with DNS results and for
dump-combustor simulations. However, the
approach does not appear to have been used for
LES engine simulations yet. In addition, since scale-
similarity models allow backscatter, which can
result in unrealizable scalar values, SC3 models
would require additional dissipation.
SC4. The transport equation model approach uses
a traditional transport equation for the subgrid sca-
lar flux or the subgrid scalar fluctuations. This is a
logical evolution of LES scalar models (see Jimenez
et al. [19] for discussion), but has only been used in
LES modelling in the context of the dynamic struc-
ture approach (SC5). Probably the primary reason
this approach has not been used is that every scalar
(e.g. species and energy) requires an additional
transport equation, and this can become very
expensive. This is true, especially if simple turbu-
lence models are used and high grid resolution is
required. In addition, each transport equation
requires a model for the subgrid scalar dissipation.
This approach could be used in C4 type combustion
models, especially the mixture fraction models
where the only scalar transport required is for the
mixture fraction variable.
SC5. The dynamic structure approach of T7 was
extended for scalar transport modelling by
Chumakov and Rutland [124]. This involves a
transport equation for the subgrid scalar fluctua-
tions that is then used with the dynamic structure
approach to model the scalar flux. This can work
well, but can be expensive because, just as with
SC4, an additional transport equation for the fluc-
tuating component of each species is required.
Chumakov is continuing work on similar advanced
scalar flux modelling for LES, and the results look
promising [125]. However, testing on engine appli-
cations is still required.
SC6. The linear eddy model (LEM) approach uses
a very different concept to model subgrid scalar
mixing. In LEM, a one-dimensional (1D) unsteady
equation, which can contain mixing, diffusion, and
reaction is solved in each CFD computational grid
cell. The emphasis of the LEM approach is on the
mixing term that is modelled using a triplet map-
ping. This is a simple rearrangement of values based
on length and time scales that mimic turbulent
eddies. The original concept was developed by
Kerstein [126] for turbulence. However, it is
Menon’s group that has carried out a lot of work
extending LEM for reacting flows [39, 60]. This
approach can be expensive because a large number
of grid points are used within each CFD grid cell for
the 1D equations. Partly from the increased CPU
resources and improved algorithms, the approach
gives nice results [38, 127, 128]. The LEM can be
parallelized, but it is not practical for applications at
this time and has not been used in engine LES.
3.3.1 Scalars: additional considerations
Scalar dissipation rate. A scalar dissipation rate term
can arise in several different ways when modelling
scalars and combustion. As noted in the previous
section, it may be used as a time scale in combus-
tion modelling. For scalars, it often occurs in pre-
scribed PDF combustion models, in which a mean
and variance of some scalar is required. Commonly,
the scalar is the mixture fraction, and transport
equations for both the mean and variance are used.
Within the transport equation for the variance, the
scalar dissipation rate occurs.
The most common approach for scalar dissipa-
tion rate modelling in LES is one that is based on
RANS modelling and uses the turbulence time scale
[19]. However, this does not make sufficient use of
LES concepts, and has been shown to give poor
results in a priori engine studies [63]. More promis-
ing approaches based on scale-similarity ideas have
been developed by Chumakov [129] for general
flows and by Zhang et al. [63] for engine LES.
Scalar variance. Another approach to modelling
the scalar variance is to avoid using a transport
equation and use an algebraic closure. This
approach has been developed for use in LES using
scale-similarity concepts by Cook and Riley [130],
Cook [131], and Jimenez et al. [19]. This avoids the
need for a scalar dissipation rate model in the trans-
port equation. In addition, the approach seems to
provide a sufficiently accurate mixture fraction sca-
lar variance for use in C4d prescribed PDF combus-
tion models. The approach has been used in LES
diesel engine modelling as part of a multimode
combustion model, and gives good results when
compared to experimental data [44]. However, there
is strong evidence from Colin and Benkenida [132]
that an algebraic closure is insufficient in flows
with sprays, indicating that additional research is
needed.
438 C J Rutland
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from
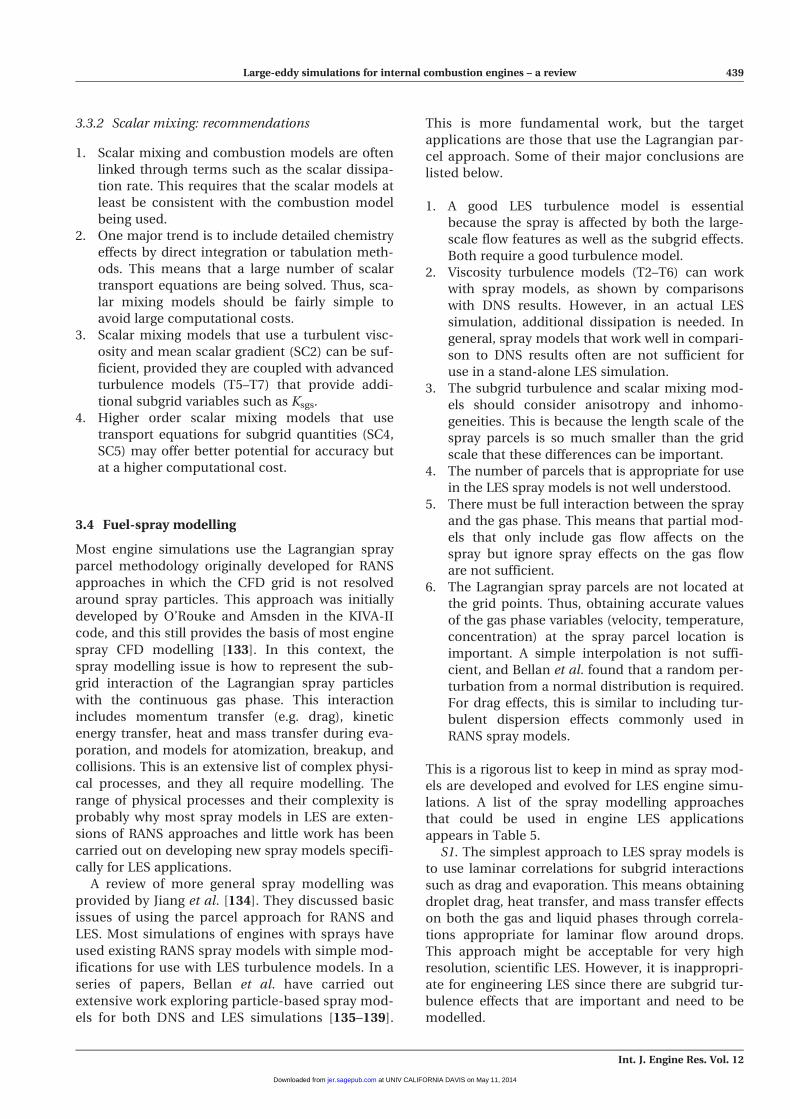
3.3.2 Scalar mixing: recommendations
1. Scalar mixing and combustion models are often
linked through terms such as the scalar dissipa-
tion rate. This requires that the scalar models at
least be consistent with the combustion model
being used.
2. One major trend is to include detailed chemistry
effects by direct integration or tabulation meth-
ods. This means that a large number of scalar
transport equations are being solved. Thus, sca-
lar mixing models should be fairly simple to
avoid large computational costs.
3. Scalar mixing models that use a turbulent visc-
osity and mean scalar gradient (SC2) can be suf-
ficient, provided they are coupled with advanced
turbulence models (T5–T7) that provide addi-
tional subgrid variables such as Ksgs.
4. Higher order scalar mixing models that use
transport equations for subgrid quantities (SC4,
SC5) may offer better potential for accuracy but
at a higher computational cost.
3.4 Fuel-spray modelling
Most engine simulations use the Lagrangian spray
parcel methodology originally developed for RANS
approaches in which the CFD grid is not resolved
around spray particles. This approach was initially
developed by O’Rouke and Amsden in the KIVA-II
code, and this still provides the basis of most engine
spray CFD modelling [133]. In this context, the
spray modelling issue is how to represent the sub-
grid interaction of the Lagrangian spray particles
with the continuous gas phase. This interaction
includes momentum transfer (e.g. drag), kinetic
energy transfer, heat and mass transfer during eva-
poration, and models for atomization, breakup, and
collisions. This is an extensive list of complex physi-
cal processes, and they all require modelling. The
range of physical processes and their complexity is
probably why most spray models in LES are exten-
sions of RANS approaches and little work has been
carried out on developing new spray models specifi-
cally for LES applications.
A review of more general spray modelling was
provided by Jiang et al. [134]. They discussed basic
issues of using the parcel approach for RANS and
LES. Most simulations of engines with sprays have
used existing RANS spray models with simple mod-
ifications for use with LES turbulence models. In a
series of papers, Bellan et al. have carried out
extensive work exploring particle-based spray mod-
els for both DNS and LES simulations [135–139].
This is more fundamental work, but the target
applications are those that use the Lagrangian par-
cel approach. Some of their major conclusions are
listed below.
1. A good LES turbulence model is essential
because the spray is affected by both the large-
scale flow features as well as the subgrid effects.
Both require a good turbulence model.
2. Viscosity turbulence models (T2–T6) can work
with spray models, as shown by comparisons
with DNS results. However, in an actual LES
simulation, additional dissipation is needed. In
general, spray models that work well in compari-
son to DNS results often are not sufficient for
use in a stand-alone LES simulation.
3. The subgrid turbulence and scalar mixing mod-
els should consider anisotropy and inhomo-
geneities. This is because the length scale of the
spray parcels is so much smaller than the grid
scale that these differences can be important.
4. The number of parcels that is appropriate for use
in the LES spray models is not well understood.
5. There must be full interaction between the spray
and the gas phase. This means that partial mod-
els that only include gas flow affects on the
spray but ignore spray effects on the gas flow
are not sufficient.
6. The Lagrangian spray parcels are not located at
the grid points. Thus, obtaining accurate values
of the gas phase variables (velocity, temperature,
concentration) at the spray parcel location is
important. A simple interpolation is not suffi-
cient, and Bellan et al. found that a random per-
turbation from a normal distribution is required.
For drag effects, this is similar to including tur-
bulent dispersion effects commonly used in
RANS spray models.
This is a rigorous list to keep in mind as spray mod-
els are developed and evolved for LES engine simu-
lations. A list of the spray modelling approaches
that could be used in engine LES applications
appears in Table 5.
S1. The simplest approach to LES spray models is
to use laminar correlations for subgrid interactions
such as drag and evaporation. This means obtaining
droplet drag, heat transfer, and mass transfer effects
on both the gas and liquid phases through correla-
tions appropriate for laminar flow around drops.
This approach might be acceptable for very high
resolution, scientific LES. However, it is inappropri-
ate for engineering LES since there are subgrid tur-
bulence effects that are important and need to be
modelled.
Large-eddy simulations for internal combustion engines – a review 439
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

S2. The use of RANS correlations is probably the
most commonly used approach for spray modelling
in LES. Here, subgrid models based on single dro-
plet turbulent correlations for drag, turbulent dis-
persion, evaporation, and even breakup and
collision are used with LES turbulence models.
Successful examples of this approach for engines
can be found in: (a) Hu et al. [15] and Hu and
Rutland [78] for diesel applications with the T7 tur-
bulence model and a multimode combustion
model, (b) Kaario et al. and Vuorinen et al. at
Helsinki University of Technology [10, 140] for die-
sel applications with T5 and later T1 turbulence
models and a C3a combustion model, and (c) Aria
et al. [141] for direct injection gasoline applications
using a T2 turbulence model.
In a series of papers, a group at Doshisha
University has explored spray models using KIVA
with the T5 turbulence model [52, 53, 142–144].
The spray models were essentially the same as the
RANS-based models available in the original KIVA
code. Their work focused on non-engine simula-
tions of spray bombs with fairly dense grids. They
made nice comparisons with experimental work,
demonstrating that the S2 approach for spray mod-
elling can provide reasonable results with very high
grid resolution. One interesting aspect of their work
was the addition of a higher order numerical
method for momentum equation convection terms.
Their results demonstrated moderate improvement
with the new numerical technique. However, it was
achieved only on a simple Cartesian grid used in
their spray bomb domain and might be difficult to
achieve on a practical engine grid.
S3. The most desirable spray models would be
those that are developed specifically for LES and are
fully consistent with the turbulence and scalar mix-
ing models. These would take advantage of the
information from the LES models such as subgrid
turbulence, ksgs, for modelling the many fuel-spray
processes. There was some initial work on this car-
ried out by Pannala et al. [145]. They made an
important observation that models should consider
that the interaction between the spray and the gas
flow occurs at both the subgrid and the resolved
scales. They developed a partitioning to account for
this but, unfortunately, the work was not well
explained so it is hard to evaluate.
More recently, Bharadwaj et al. developed an LES
specific model for diesel sprays [146, 147]. The
model reformulated the spray source term in the
subgrid kinetic energy transport equation of a T7
turbulence model. The model used a deconvolution
method [148] to obtain a better representation of
subgrid velocities at the droplet location. The model
addressed one of the primary problems with using
RANS spray models with LES turbulence models. In
these situations, it is not uncommon to see high-
speed sprays significantly over-penetrating unless a
very dense grid is used [142]. This can be traced to
the RANS spray source term being modelled only as
a sink of kinetic energy, whereas in the LES formula-
tion, the spray can be either a source or a sink
depending on the spray velocities and the ambient
gas conditions. Figure 5 demonstrates how an LES
simulation without an appropriate source term has
significant over-penetration of the liquid parcels
while the addition of the source term from
Bharadwaj et al. brings the penetration in line with
the experimentally calibrated RANS results.
S4. Recently, there have been a number of publi-
cations describing high-resolution, very detailed
simulations of fuel sprays. In a paper by deVillers
et al. [149], a volume of fluid (VOF) approach was
used to study near-nozzle flow and primary breakup
in a diesel spray. They used the OpenFOAM code
[150, 151] with a T5 turbulence model on a very
dense grid. The VOF method used was adapted for
droplet breakup, but no other specific LES spray
models were used. In later work, Befrui et al. [152]
used the VOF method to simulate internal and
near-nozzle flow for gasoline direct injection appli-
cations. They used the OpenFOAM code with a T5
turbulence model, a very dense grid and no special
Table 5 Classification of LES spray modelling approaches
Model type Advantages Disadvantages
S1 Laminar correlations Simple, well-established submodels Ignores important physical processesfrom subgrid turbulence
S2 RANS correlations Uses established turbulence models Does not consider specific advantagesof LES formulations
S3 LES modifications Integrates spray models into LESmethodology
Still early in development phase; littleexperimental or DNS data forvalidation
S4 Continuous phase, non-particle models More authentic representation thanLagrangian parcel approaches
Computational very expensive and notapplicable to full combustionchamber simulations
440 C J Rutland
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from
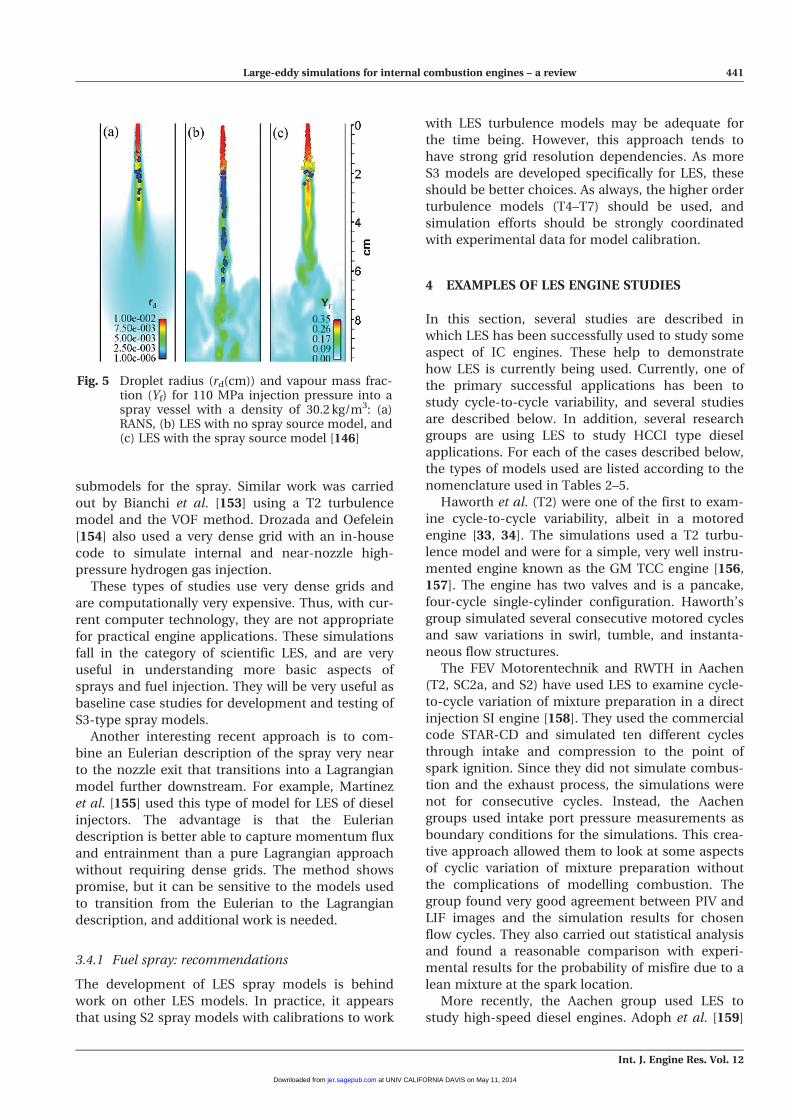
submodels for the spray. Similar work was carried
out by Bianchi et al. [153] using a T2 turbulence
model and the VOF method. Drozada and Oefelein
[154] also used a very dense grid with an in-house
code to simulate internal and near-nozzle high-
pressure hydrogen gas injection.
These types of studies use very dense grids and
are computationally very expensive. Thus, with cur-
rent computer technology, they are not appropriate
for practical engine applications. These simulations
fall in the category of scientific LES, and are very
useful in understanding more basic aspects of
sprays and fuel injection. They will be very useful as
baseline case studies for development and testing of
S3-type spray models.
Another interesting recent approach is to com-
bine an Eulerian description of the spray very near
to the nozzle exit that transitions into a Lagrangian
model further downstream. For example, Martinez
et al. [155] used this type of model for LES of diesel
injectors. The advantage is that the Eulerian
description is better able to capture momentum flux
and entrainment than a pure Lagrangian approach
without requiring dense grids. The method shows
promise, but it can be sensitive to the models used
to transition from the Eulerian to the Lagrangian
description, and additional work is needed.
3.4.1 Fuel spray: recommendations
The development of LES spray models is behind
work on other LES models. In practice, it appears
that using S2 spray models with calibrations to work
with LES turbulence models may be adequate for
the time being. However, this approach tends to
have strong grid resolution dependencies. As more
S3 models are developed specifically for LES, these
should be better choices. As always, the higher order
turbulence models (T4–T7) should be used, and
simulation efforts should be strongly coordinated
with experimental data for model calibration.
4 EXAMPLES OF LES ENGINE STUDIES
In this section, several studies are described in
which LES has been successfully used to study some
aspect of IC engines. These help to demonstrate
how LES is currently being used. Currently, one of
the primary successful applications has been to
study cycle-to-cycle variability, and several studies
are described below. In addition, several research
groups are using LES to study HCCI type diesel
applications. For each of the cases described below,
the types of models used are listed according to the
nomenclature used in Tables 2–5.
Haworth et al. (T2) were one of the first to exam-
ine cycle-to-cycle variability, albeit in a motored
engine [33, 34]. The simulations used a T2 turbu-
lence model and were for a simple, very well instru-
mented engine known as the GM TCC engine [156,
157]. The engine has two valves and is a pancake,
four-cycle single-cylinder configuration. Haworth’s
group simulated several consecutive motored cycles
and saw variations in swirl, tumble, and instanta-
neous flow structures.
The FEV Motorentechnik and RWTH in Aachen
(T2, SC2a, and S2) have used LES to examine cycle-
to-cycle variation of mixture preparation in a direct
injection SI engine [158]. They used the commercial
code STAR-CD and simulated ten different cycles
through intake and compression to the point of
spark ignition. Since they did not simulate combus-
tion and the exhaust process, the simulations were
not for consecutive cycles. Instead, the Aachen
groups used intake port pressure measurements as
boundary conditions for the simulations. This crea-
tive approach allowed them to look at some aspects
of cyclic variation of mixture preparation without
the complications of modelling combustion. The
group found very good agreement between PIV and
LIF images and the simulation results for chosen
flow cycles. They also carried out statistical analysis
and found a reasonable comparison with experi-
mental results for the probability of misfire due to a
lean mixture at the spark location.
More recently, the Aachen group used LES to
study high-speed diesel engines. Adoph et al. [159]
Fig. 5 Droplet radius (rd(cm)) and vapour mass frac-tion (Yf) for 110 MPa injection pressure into aspray vessel with a density of 30.2 kg/m3: (a)RANS, (b) LES with no spray source model, and(c) LES with the spray source model [146]
Large-eddy simulations for internal combustion engines – a review 441
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from
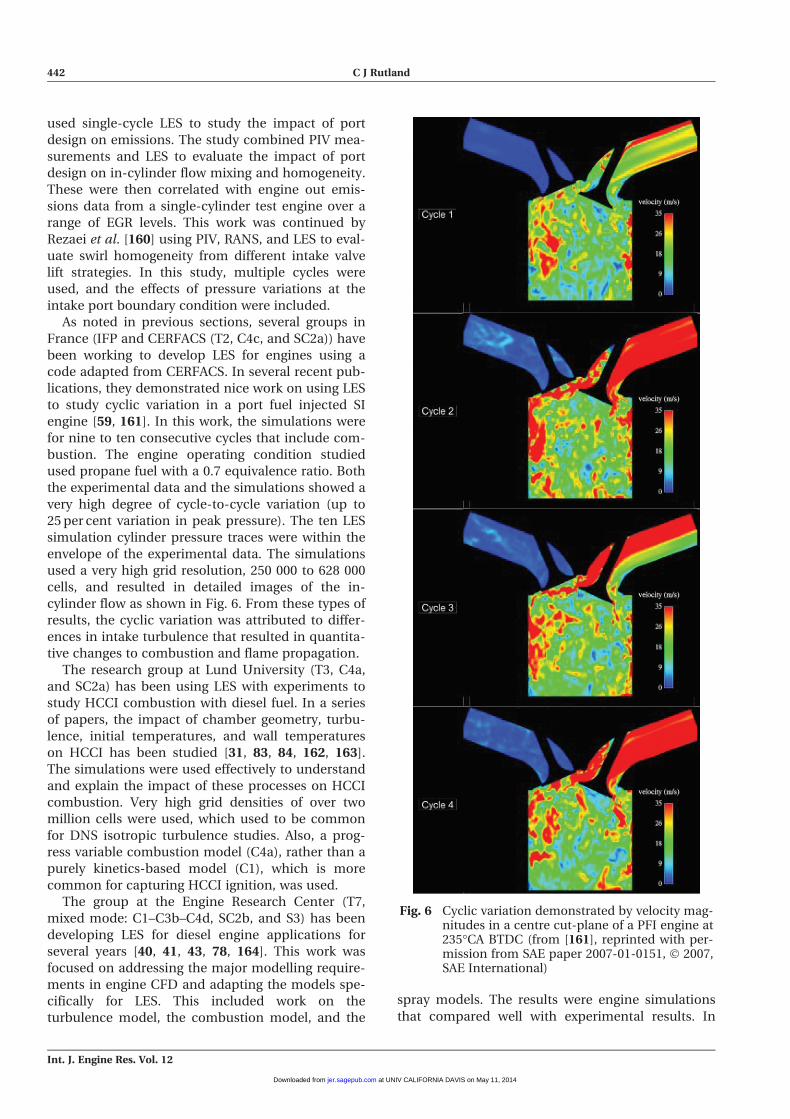
used single-cycle LES to study the impact of port
design on emissions. The study combined PIV mea-
surements and LES to evaluate the impact of port
design on in-cylinder flow mixing and homogeneity.
These were then correlated with engine out emis-
sions data from a single-cylinder test engine over a
range of EGR levels. This work was continued by
Rezaei et al. [160] using PIV, RANS, and LES to eval-
uate swirl homogeneity from different intake valve
lift strategies. In this study, multiple cycles were
used, and the effects of pressure variations at the
intake port boundary condition were included.
As noted in previous sections, several groups in
France (IFP and CERFACS (T2, C4c, and SC2a)) have
been working to develop LES for engines using a
code adapted from CERFACS. In several recent pub-
lications, they demonstrated nice work on using LES
to study cyclic variation in a port fuel injected SI
engine [59, 161]. In this work, the simulations were
for nine to ten consecutive cycles that include com-
bustion. The engine operating condition studied
used propane fuel with a 0.7 equivalence ratio. Both
the experimental data and the simulations showed a
very high degree of cycle-to-cycle variation (up to
25 per cent variation in peak pressure). The ten LES
simulation cylinder pressure traces were within the
envelope of the experimental data. The simulations
used a very high grid resolution, 250 000 to 628 000
cells, and resulted in detailed images of the in-
cylinder flow as shown in Fig. 6. From these types of
results, the cyclic variation was attributed to differ-
ences in intake turbulence that resulted in quantita-
tive changes to combustion and flame propagation.
The research group at Lund University (T3, C4a,
and SC2a) has been using LES with experiments to
study HCCI combustion with diesel fuel. In a series
of papers, the impact of chamber geometry, turbu-
lence, initial temperatures, and wall temperatures
on HCCI has been studied [31, 83, 84, 162, 163].
The simulations were used effectively to understand
and explain the impact of these processes on HCCI
combustion. Very high grid densities of over two
million cells were used, which used to be common
for DNS isotropic turbulence studies. Also, a prog-
ress variable combustion model (C4a), rather than a
purely kinetics-based model (C1), which is more
common for capturing HCCI ignition, was used.
The group at the Engine Research Center (T7,
mixed mode: C1–C3b–C4d, SC2b, and S3) has been
developing LES for diesel engine applications for
several years [40, 41, 43, 78, 164]. This work was
focused on addressing the major modelling require-
ments in engine CFD and adapting the models spe-
cifically for LES. This included work on the
turbulence model, the combustion model, and the
spray models. The results were engine simulations
that compared well with experimental results. In
Fig. 6 Cyclic variation demonstrated by velocity mag-nitudes in a centre cut-plane of a PFI engine at235�CA BTDC (from [161], reprinted with per-mission from SAE paper 2007-01-0151, � 2007,SAE International)
442 C J Rutland
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

addition, when applied to HCCI combustion, the
simulation results were able to capture cyclic varia-
bility due to temperature non-homogeneities in the
spray region.
5 PROSPECTS FOR THE FUTURE
The outlook for using LES in IC engine modelling is
very good. The primary engine submodels, as out-
lined in this review, are maturing. User experience
is growing, and the number of high-quality studies
using LES is rapidly increasing.
There is still a need for model improvements,
especially in the areas of combustion and sprays.
However, this need is not unique to LES. In addi-
tion, improvements and adaptation to LES are
needed for many second-tier models such as wall
heat transfer, nozzle flows for spray boundary con-
ditions, spray breakup, and atomization.
Improvements to numerical methods are also
needed. However, improvements will be somewhat
limited by the complexity of the domain, moving
boundaries, and numerical treatment of fuel sprays.
These limitations should not preclude the use of
LES in engines, as there is still much to be gained in
terms of increasing the types of problems that can
be studied.
Important issues that remain on the horizon are
validation and establishing ‘best practices’ for LES
engine simulations. Increasing activity and publica-
tions will help to address these issues naturally. In
addition, there is a high probability that research
groups are already establishing programs to address
these issues as the potential of LES becomes clearer.
Thus, users are encouraged to apply LES to
appropriate problems that are enhanced or require
the increased sensitivity to flow unsteadiness and
large-scale structures. For example, topics such as
cyclic variation and design sensitivity are probably
best studied with LES. However, users should be
aware of the large range of models used in engine
CFD and carefully choose the appropriate LES capa-
ble submodels. The taxonomy presented in this
review should be helpful in this regard.
FUNDING
The author acknowledges support over the years in
the broad area of LES for engineering applica-
tions from a number of sources, including the
US Department of Energy [grant numbers DE-FC04-
02AL67612, DE-FC26-06NT42628, and DE-EE000
0202], General Motors Research primarily through
the GM-UW Cooperative Research Lab, Caterpillar
Inc., the National Science Foundation [grant num-
ber 0500056], and the Air Force Office of Scientific
Research [grant number F49620-02-1-0348].
� Authors 2011
REFERENCES
1 Niatoh, K., Ito, H., and Takagi, Y. Large eddysimulation of premixed-flame in engine based onthe multi-level formulation and the renormaliza-tion group theory. SAE paper 920590, 1992.
2 Ferziger, J. H. Simulation of complex turbulentflows: recent advances and prospects in wind engi-neering. J. Wind Eng. Ind. Aerodyn., 1993, 46–47,195–212.
3 Fureby, C., Tabor, G., Weller, H. G., and Gos-man, A. D. A comparative study of subgrid scalemodels in homogeneous isotropic turbulence.Phys. Fluids, 1997, 9(5), 1416–1429.
4 Fureby, C. Towards the use of large eddy simula-tion in engineering. Prog. Aerosp. Sci., 2008, 44(6),381–396.
5 Geurts, B. J. Modern simulation strategies for tur-bulent flow, 2001 (Edwards, Philadelphia, PA).
6 Piomelli, U. Large-eddy simulation: achieve-ments and challenges. Prog. Aerosp. Sci., 1999, 35,335–362.
7 Pope, S. B. Ten questions concerning the large-eddy simulation of turbulent flows. New J. Phys.,1999, 6(35), 1–24.
8 Poinsot, T. and Veynante, D. Theoretical andnumerical combustion, 2005 (Edwards, Philadel-phia, PA).
9 Pope, S. B. Turbulent flows, 2000 (Cambridge Uni-versity Press, Cambridge, UK).
10 Kaario, O., Pokela, H., Kjaldman, L., Tiainen, J.,and Larmi, M. LES and RNG turbulence modelingin DI diesel engines. SAE paper 2003-01-1069, 2003.
11 Germano, M., Piomelli, U., Moin, P., andCabot, W. H. A dynamic subgrid-scale eddy viscos-ity model. Phys. Fluids A: Fluid Dyn., 1991, 3(7),1760–1765.
12 Lu, H., Rutland, C. J., and Smith, L. M. A prioritest of one-equation LES modeling of rotating tur-bulence. J. Turb., 2007, 8(37), pp. 127, DOI:10.1080/14685240701493947.
13 Ferziger, J. H. Simulation of incompressible turbu-lent flows. J. Comput. Phys., 1987, 69(1), 1–48.
14 Clark, R. A., Ferziger, J. H., and Reynolds, W. C.Evaluations of subgrid-scale models using an accu-rately simulated turbulent flow. J. Fluid Mech.,1979, 91, 1–16.
15 Hu, B., Jhavar, R., Singh, S., Reitz, R. D., andRutland, C. J. Combustion modeling of diesel com-bustion with partially premixed conditions. SAEpaper 2007-01-0163, 2007.
16 Pitsch, H. Large-eddy simulation of turbulentcombustion. Ann. Rev. Fluid Mech., 2006, 38(1),453–482.
Large-eddy simulations for internal combustion engines – a review 443
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from
17 Kempf, A., Flemming, F., Janicka, J., Bellan, J.,Gore, J. P., and Ihme, M. Investigation of lengths-cales, scalar dissipation, and flame orientation in apiloted diffusion flame by LES, Proceedings of theCombustion Institute, 2005, 30, pp. 557–565.
18 Smagorinsky, J. General circulation experimentswith the primitive equations. Mon. Weather Rev.,1963, 91(3), 99–164.
19 Jimeenez, C., Ducros, F., Cuenot, B., and Bee-dat, B. Subgrid scale variance and dissipation of ascalar field in large eddy simulations. Phys. Fluids,2001, 13(6), 1748.
20 Boris, J. P., Grinstein, F. F., Oran, E. S., andKolbe, R. L. New insights into large eddy simula-tion. Fluid Dyn. Res., 1992, 10(4–6), 199–228.
21 Celik, I., Yavuz, I., Smirnov, A., Smith, J.,Amin, E., and Gel, A. Prediction of in-cylinder tur-bulence for IC engines. Combust. Sci. Technol.,2000, 153(1), 339–368.
22 Amsden, A. KIVA-3V: a block-structure KIVA pro-gram for engines with vertical or canted valves.Los Alamos Report LA-13313-MS, (T3 Group inter-nal report, approved for public release), 1997.
23 Celik, I., Yavuz, I., and Smirnov, A. Large eddysimulations of in-cylinder turbulence for internalcombustion engines: a review. Int. J. Engine Res.,2001, 2(2), 119–148.
24 Nicoud, F. and Ducros, F. Subgrid-scale stressmodelling based on the square of the velocity gra-dient tensor. Flow, Turbul. Combust., 1999, 62,183–200.
25 Moureau, V., Barton, I., Angelberger, C., andPoinsot, T. Towards large eddy simulation in inter-nal-combustion engines: simulation of a com-pressed tumble flow. SAE paper 2004-01-1995, 2004.
26 Devesa, A., Moreau, J., Poinsot, T., and Helie, J.Large eddy simulations of jet / tumble interactionin a GDI model engine flow. SAE paper 2004-01-1997, 2004.
27 Frusiani, F., Forte, C., and Bianchi, G. M. Assess-ment of a numerical methodology for large eddysimulation of ice wall bounded non-reactive flows.SAE paper 2007-01-4145, 2007.
28 Brusiani, F. and Bianchi, G. M. LES simulation ofICE non-reactive flows in fixed grids. SAE paper2008-01-0959, 2008.
29 Bardina, J., Ferziger, J. H., and Reynolds, W. C.Improved subgrid-scale models for large eddysimulation. AIAA paper AIAA 1980-1357, 1980.
30 Meneveau, C. and Katz, J. Scale-invariance andturbulence models for large-eddy simulation. Ann.Rev. Fluid Mech., 2000, 32(1), 1–32.
31 Yu, R., Bai, X. S., Hildingsson, L., Hultqvist, A.,and Miles, P. Numerical and experimental investi-gation of turbulent flows in a diesel engine. SAEpaper 2006-01-3436, 2006.
32 Meneveau, C., Lund, T. S., and Cabot, W. H. ALagrangian dynamic subgrid-scale model of turbu-lence. J. Fluid Mech., 1996, 319, 353–385.
33 Haworth, D. C. Large-eddy simulation of in-cylinder flows. Oil Gas Sci. Technol., 1999, 54(2),175–185.
34 Haworth, D. C. and Jansen, K. Large-eddy simula-tion on unstructured deforming meshes: towardsreciprocating IC engines. Comput. Fluids, 2000,29(5), 493–524.
35 Yoshizawa, A. and Horiuti, K. A statistically-derivedsubgrid-scale kinetic energy model for the large-eddy simulation of turbulent flows. J. Phys. Soc.Japan, 1985, 54(8), 2834–2839.
36 Kim, W. -W. and Menon, S. A new dynamic one-equation subgrid scale model for large-eddy simu-lations. AIAA paper 95-0356, 1995.
37 Nelson, C. and Menon, S. Unsteady simulations ofcompressible spatial mixing layers. AIAA paperAIAA 98-0786, 1998.
38 Kim, W.- W., Menon, S., and Mongia, H. C. Large-eddy simulation of a gas turbine combustor flow.Combust. Sci. Technol., 1999, 143(1), 25–62.
39 Sone, K. and Menon, S. Effect of subgrid modelingon the in-cylinder unsteady mixing process in adirect injection engine. J. Eng. Gas Turbine Power,2003, 125(2), 435.
40 Pomraning, E. and Rutland, C. J. Dynamic one-equation nonviscosity large-eddy simulationmodel. AIAA J., 2002, 40(4), 689–701.
41 Chumakov, S. G. and Rutland, C. J. Dynamicstructure subgrid-scale models for large eddy simu-lation. Int. J. Numer. Methods Fluids, 2005, 47(8–9),911–923.
42 Lu, H., Rutland, C. J., and Smith, L. M. A posterioritests of one-equation LES modeling of rotatingturbulence. Int. J. Mod. Phys. C, 2008, 19(12),1949–1964.
43 Jhavar, R. and Rutland, C. J. Using large eddysimulations to study mixing effects in early injec-tion diesel engine combustion. SAE paper 2006-01-0871, 2006.
44 Banerjee, S., Liang, T., Rutland, C. J., and Hu, B.Validation of an LES multi mode combustionmodel for diesel combustion. SAE paper 2010-01-0361, 2010.
45 Kannepalli, C. and Piomelli, U. Large-eddy simu-lation of a three-dimensional shear-driven tur-bulent boundary layer. J. Fluid Mech., 2000, 423,175–203.
46 Chang III, P. A., Piomelli, U., and Blake, W. K.Relationship between wall pressure and velocity-field sources. Phys. Fluids, 1999, 11(11), 3434–3448.
47 Cabot, W. and Moin, P. Approximate wall bound-ary conditions in the large-eddy simulation of highReynolds number flow. Flow, Turbul. Combust.,2000, 63(1), 269–291.
48 Piomelli, U. Wall-layer models for large-eddysimulations. Prog. Aerosp. Sci., 2008, 44(6), 437–446.
49 Frohlich, J. and von Terzi, D. Hybrid LES/RANSmethods for the simulation of turbulent flows.Prog. Aerosp. Sci., 2008, 44(5), 349–377.
50 Rodi, W., Ferziger, J. H., Breuer, M., and Pour-quie, M. Status of large eddy simulation: results ofa workshop. J. Fluids Eng., Trans. ASME, 1997,119(2), 248–262.
444 C J Rutland
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from
51 Ghosal, S. and Moin, P. The basic equations forthe large eddy simulation of turbulent flowsin complex geometry. J. Comput. Phys., 1995, 118,24–37.
52 Hori, T., Kuge, T., Senda, J., and Fujimoto, H.Large eddy simulation of diesel spray combustionwith eddy-dissipation model and CIP method byuse of KIVALES. SAE paper 2007-01-0247, 2007.
53 Hori, T., Kuge, T., Senda, J., and Fujimoto, H.Effect of convective schemes on LES of fuel sprayby use of KIVALES. SAE paper 2008-01-0930, 2008.
54 Thobois, L., Rymer, G., Souleres, T., andPoinsot, T. Large-eddy simulation in IC enginegeometries. SAE paper 2004-01-1854, 2004.
55 Thobois, L., Lauvergne, R., and Poinsot, T. UsingLES to investigate reacting flow physics in enginedesign process. SAE paper 2007-01-0166, 2007.
56 Reitz, R. D. and Rutland, C. J. Development andtesting of diesel engine CFD models. Prog. EnergyCombust. Sci., 1995, 21(2), 173–196.
57 Liang, L., Reitz, R. D., Iyer, C. O., and Yi, J. Mod-eling knock in spark-ignition engines using a G-equation combustion model incorporatingdetailed chemical kinetics. SAE paper 2007-01-0165, 2007.
58 Attard, W. P., Toulson, E., Watson, H., andHamori, F. Abnormal combustion including megaknock in a 60% downsized highly turbocharged PFIengine. SAE paper 2010-01-1456, 2010.
59 Vermorel, O., Richard, S., Colin, O., Angelber-ger, C., Benkenida, A., and Veynante, D. Towardsthe understanding of cyclic variability in a sparkignited engine using multi-cycle LES. Combust.Flame, 2009, 156(8), 1525–1541.
60 Menon, S. Subgrid combustion modelling forlarge-eddy simulations. Int. J. Engine Res., 2000,1(2), 209–227.
61 Veynante, D. and Vervisch, L. Turbulent combus-tion modelling. Prog. Energy Combust. Sci., 2002,28(3), 193–266.
62 Hilbert, R., Tap, F., El-Rabii, H., andThevenin, D. Impact of detailed chemistry andtransport models on turbulent combustion simu-lations. Prog. Energy Combust. Sci., 2004, 30(1),61–117.
63 Zhang, Y., Ghandhi, J. B., Petersen, B., andRutland, C. J. Large eddy simulation of scalar dissi-pation rate in an internal combustion engine. SAEpaper 2010-01-0625, 2010.
64 Kong, S.-C. and Reitz, R. D. Use of detailedchemical kinetics to study HCCI engine combus-tion with consideration of turbulent mixingeffects. J. Eng. Gas Turbines Power, 2002, 124(3),702–707.
65 Yang, S. and Reitz, R. D. Integration of a continu-ous multi-component fuel evaporation model withan improved G-equation combustion and detailedchemical kinetics model with application to GDIengines. SAE paper 2009-01-0722, 2009.
66 Kokjohn, S., Hanson, R. M., Splitter, D. A., andReitz, R. D. Experiments and modeling of dual-fuel
HCCI and PCCI combustion using in-cylinder fuelblending. SAE paper 2009-01-2647, 2009.
67 Shi, Y., Kokjohn, S., Ge, H., and Reitz, R. D. Effi-cient multidimensional simulation of HCCI and DIengine combustion with detailed chemistry. SAEpaper 2009-01-0701, 2009.
68 Liang, L., Naik, C. V., Puduppakkam, K., Wang, C.,Modak, A., Meeks, E., Ge, H., Reitz, R. D., andRutland, C. J. Efficient simulation of diesel enginecombustion using realistic chemical kinetics in CFD.SAE paper 2010-01-0178, 2010.
69 Galpin, J., Angelberger, C., Naudin, A., andVervisch, L. Large-eddy simulation of H 2–air auto-ignition using tabulated detailed chemistry. J. Tur-bul., 2008, 9(13), 1–21.
70 Fiorina, B., Vicquelin, R., Auzillon, P.,Darabiha, N., Gicquel, O., and Veynante, D. A fil-tered tabulated chemistry model for LES of pre-mixed combustion. Combust. Flame, 2010, 157(3),465–475.
71 Barths, H., Antoni, C., and Peters, N. Three-dimensional simulation of pollutant formation in aDI diesel engine using multiple interactive flame-lets. SAE paper 982459, 1998.
72 Hergart, C., Barths, H., and Peters, N. Modelingthe combustion in a small-bore diesel engine usinga method based on representative interactive fla-melets. SAE paper 1999-01-3550, 1999.
73 Hasse, C., Barths, H., and Peters, N. Modelling theeffect of split injections in diesel engines using rep-resentative interactive flamelets. SAE paper 1999-01-3547, 1999.
74 Felsch, C., Luckhchoura, V., Weber, J.Peters, N., Hasse, C., Wiese, W., Pischinger, S.,Kolbeck, A., and Adomeit, P. Applying represen-tative interactive flamelets (rif) with specialemphasis on pollutant formation to simulate a DIdiesel engine with roof-shaped combustion cham-ber and tumble charge motion. SAE paper 2007-01-0167, 2007.
75 Abraham, J., Bracco, F. V., and Reitz, R. D. Com-parison of computed and measured premixedcharged engine combustion. Combust. Flame,1985, 60(3), 309–322.
76 Kong, S. -C. and Reitz, R. D. Multidimensionalmodeling of diesel ignition and combustion usinga multistep kinetics models. J. Eng. Gas TurbinesPower, 1993, 115(4), 781–789.
77 Rao, S. and Rutland, C. J. A flamelet time scalemodel for non-premixed combustion includingchemical kinetic effects. Combust. Flame, 2003,133(1–2), 189–191.
78 Hu, B. and Rutland, C. J. Flamelet modeling withLES for diesel engine simulations. SAE paper 2006-01-0058, 2006.
79 Bray, K. N. C. Interaction between turbulence andcombustion. In 17th International Symposiumon Combustion, 1979, pp. 223–233 (CombustionInstitute).
80 Kerstein, A., Ashurst, W., and Williams, F. Fieldequation for interface propagation in an unsteady
Large-eddy simulations for internal combustion engines – a review 445
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

homogeneous flow field. Phys. Rev. A, 1988, 37(7),2728–2731.
81 Zimont, V. L. Correlation between two approachesto combustion modeling based on the progressvariable the scalar G. In 29th International Sympo-sium on Combustion, 2001, vol. 29 (CombustionInstitute).
82 Zimont, V. L., Polifke, W., Bettelini, M., andWeisenstein, W. An efficient computational modelfor premixed turbulent combustion at high Rey-nolds numbers based on a turbulent flame speedclosure. J. Eng. Gas Turbines Power, 1998, 120(3),526–532.
83 Yu, R., Bai, X. S., Vressner, A., Hultqvist, A.,Johansson, B., Olofsson, J., Seyfried, H.,Sjoholm, J., Richter, M., and Alden, M. Effect ofturbulence on HCCI combustion. SAE paper 2007-01-0183, 2007.
84 Joelsson, T., Yu, R., Bai, X. S., Vressner, A., andJohansson, B. Large eddy simulation and experi-ments of the auto-ignition process of lean ethanol/air mixture in HCCI engines. SAE paper 2008-01-1668, 2008.
85 Vressner, A., Egnell, R., and Johansson, B. com-bustion chamber geometry effects on the perfor-mance of an ethanol fueled HCCI engine. SAEpaper 2008-01-1656, 2008.
86 Colin, O., Ducros, F., Veynante, D., and Poin-sot, T. A thickened flame model for large eddysimulations of turbulent premixed combustion.Phys. Fluids, 2000, 12(7), 1843–1863.
87 Peters, N. Turbulent combustion, 2000 (CambridgeUniversity Press, Cambridge, UK).
88 Im, H. G., Lund, T. S., and Ferziger, J. H. Largeeddy simulation of turbulent front propagationwith dynamic subgrid models. Phys. Fluids, 1997,9(12), 3826–3833.
89 Marble, F. E. and Broadwell, J. E. The coherentflame model for turbulent chemical reactions. Proj-ect Squid Report, TRW-9-PU, 1977.
90 Candel, S. M. and Poinsot, T. Flame stretch andthe balance equation for the flame area. Combust.Sci. Technol., 1990, 70, 1–15.
91 Ducros, F., Veynante, D., and Poinsot, T. A com-parison of flamelet models for premixed turbulentcombustion. Combust. Flame, 1993, 95, 101–117.
92 Angelberger, C., Poinsot, T., and Delhay, B.Improving near-wall combustion and wall heattransfer modeling in SI engine computations. SAEpaper 972881, 1997.
93 Henriot, S., Chaouche, A., Cheve, E., andDuclos, J. M. CFD aided development of a Si-Diengine. Oil Gas Sci. Technol., 1999, 54(2), 279–286.
94 Colin, O., Benkenida, A., and Angelberger, C. 3dmodeling of mixing, ignition and combustion phe-nomena in highly stratified gasoline engines. OilGas Sci. Technol., 2003, 58(1), 47–62.
95 Colin, O. and Benkenida, A. The 3-zones extendedcoherent flame model (Ecfm3z) for computing pre-mixed/diffusion combustion. Oil Gas Sci. Technol.,2004, 59(6), 593–609.
96 Subramanian, G., Vervisch, L., and Ravet, F. Newdevelopments in turbulent combustion modellingfor engine design: ECFM-CLEH combustion sub-model. SAE paper 2007-01-0154, 2007.
97 Shi, X., Li, G., and Zheng, Y. DI diesel engine com-bustion modeling based on ECFM-3Z model. SAEpaper 2007-01-4138, 2007.
98 CD-Adapco. STAR-CD, Version 3.26, User manual,2006
99 Weller, H. G., Tabor, G., Gosman, A. D., andFureby, C. Application of a flame-wrinkling LEScombustion model to a turbulent mixing layer. InSymposium (International) on Combustion, 1998,27(1), pp. 899–907.
100 Musculus, M. and Rutland, C. J. Coherent flame-let modeling of diesel engine combustion. Com-bust. Sci. Technol., 1995, 104, 295–337.
101 Richard, S., Colin, O., Vermorel, O., Ben-kenida, A., Angelberger, C., and Veynante, D.Towards large eddy simulation of combustion inspark ignition engines. In Proceedings of the Com-bustion Institute, 2007, vol. 31(2), pp. 3059–3066.
102 Cook, A. W., Riley, J. J., and Kosaly, G. A laminarflamelet approach to subgrid-scale chemistry inturbulent flows. Combust. Flame, 1997, 109(3),332–341.
103 Pierce, C. D. and Moin, P. A dynamic model forsubgrid-scale variance and dissipation rate of aconserved scalar. Phys. Fluids, 10(12), 3041–3044.
104 DesJardin, P. E. and Frankel, S. H. Large eddysimulation of a nonpremixed reacting jet: applica-tion and assessment of subgrid-scale combustionmodels. Phys. Fluids, 1998, 10(9), 2298–2314.
105 Pitsch, H. and Steiner, H. Large-eddy simulationof a turbulent piloted methane/air diffusionflame (Sandia flame D). Phys. Fluids, 2000, 12(10),2541–2554.
106 Galpin, J., Naudin, A., Vervisch, L., Angel-berger, C., Colin, O., and Domingo, P. Large-eddy simulation of a fuel-lean premixed turbulentswirl-burner. Combust. Flame, 2008, 155(1–2),247–266.
107 Lee, D., Pomraning, E., and Rutland, C. J. LESmodeling of diesel engines. SAE paper 2002-01-2779, 1995.
108 Li, Y. H. and Kong, S. -C. Diesel combustionmodelling using LES turbulence model withdetailed chemistry. Combust. Theory Model., 2008,12(2), 205–219.
109 Klimenko, A. Y. Multicomponent diffusion of var-ious admixtures in turbulent flow. Fluid Dyn.,1990, 25, 327–334.
110 Bilger, R. W. Conditional moment closure for tur-bulent reacting flow. Phys. Fluids A, 1993, 5(2),436–444.
111 Wright, Y., Depaola, G., Boulouchos, K., andMastorakos, E. Simulations of spray autoignitionand flame establishment with two-dimensionalCMC. Combust. Flame, 2005, 143(4), 402–419.
112 Kim, S. H., Hu, K. Y., and Fraser, R. A. Numericalprediction of the autoignition delay in a diesel-
446 C J Rutland
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from
like environment by the conditional moment clo-sure model. SAE paper 2000-01-0200, 2000.
113 De Paola, G., Mastorakos, E., Wright, Y. M., andBoulouchos, K. Diesel engine simulations withmulti-dimensional conditional moment closure.Combust. Sci. Technol., 2008, 180(5), 883–899.
114 Steiner, H. and Bushe, W. K. Large eddy simula-tion of a turbulent reacting jet with conditionalsource-term estimation. Phys. Fluids, 2001, 13(3),754–769.
115 Triantafyllidis, A. and Mastorakos, E. Implemen-tation issues of the conditional moment closuremodel in large eddy simulations. Flow, Turbul.Combust., 2010, 84(3), 481–512.
116 Pope, S. B. PDF methods for turbulent reactiveflows. Prog. Energy Combust. Sci., 1985, 11(2),119–192.
117 Haworth, D. C. Progress in probability densityfunction methods for turbulent reacting flows.Prog. Energy Combust. Sci., 2010, 36(2), 168–259.
118 Subramaniam, S. and Haworth, D. C. A probabil-ity density function method for turbulent mixingand combustion on three dimensional unstruc-tured deforming grids. Int. J. Engine Res., 2000,1(2), 171–190.
119 Kung, E. and Haworth, D. C. Transported prob-ability density function (tPDF) modeling fordirect-injection internal combustion engines. SAEpaper 2008-01-0969, 2008.
120 Ihme, M. and Pitsch, H. Prediction of extinctionand reignition in nonpremixed turbulent flamesusing a flamelet/progress variable model 2. Appli-cation in LES of Sandia flames D and E. Combust.Flame, 2008, 155(1–2), 90–107.
121 Tamagna, D., Ra, Y., and Reitz, R. D. Multidi-mensional simulation of PCCI combustion usinggasoline and dual-fuel direct injection withdetailed chemical kinetics. SAE paper 2007-01-0190, 2007.
122 Tamagna, D., Gentili, R., Ra, Y., and Reitz, R. D.Multidimensional simulation of the influence offuel mixture composition and injection timing ingasoline-diesel dual-fuel applications. SAE paper2008-01-0031, 2008.
123 Moin, P., Squires, K. D., Cabot, W. H., andLee, S. A dynamic subgrid-scale model for com-pressible turbulence and scalar transport. Phys.Fluids A, 1991, 3(11), 2746–2757.
124 Chumakov, S. G. and Rutland, C. J. Dynamicstructure models for scalar flux and dissipationin large eddy simulation. AIAA J., 2004, 42(6),1132–1139.
125 Chumakov, S. G. A priori study of subgrid-scaleflux of a passive scalar in isotropic homogeneousturbulence. Phys. Rev. E, 2008, 78(3), 1–11.
126 Kerstein, A. Linear-eddy modelling of turbulenttransport. Part 3. Mixing and differential molecu-lar diffusion in round jets. J. Fluid Mech., 1990,216, 411–435.
127 Goldin, G. M. and Menon, S. A scalar pdf con-struction model for turbulent non-premixed
combustion. Combust. Sci. Technol., 1997, 125(1–6), 47–72.
128 Sen, B. A. and Menon, S. Linear eddy mixingbased tabulation and artificial neural networks forlarge eddy simulations of turbulent flames. Com-bust. Flame, 2010, 157(1), 62–74.
129 Chumakov, S. G. Scaling properties of subgrid-scale energy dissipation. Phys. Fluids, 2007, 19(5),058104.
130 Cook, A. W. and Riley, J. J. A subgrid model forequilibrium chemistry in turbulent flows. Phys.Fluids, 1994, 6(8), 2868–2870.
131 Cook, A. W. Determination of the constant coeffi-cient in scale similarity models of turbulence.Phys. Fluids, 1997, 9(5), 1485–1487.
132 Colin, O. and Benkenida, A. A new scalar fluctua-tion model to predict mixing in evaporatingtwo-phase flows. Combust. Flame, 2003, 134(3),207–227.
133 Amsden, A. KIVA-II: a computer program for che-mically reactive flows with sprays. Los AlamosReport LA-11560-MS (T3 Group internal report,approved for public release), 1989.
134 Jiang, X., Siamas, G. A., Jagus, K., andKarayiannis, T. G. Physical modelling andadvanced simulations of gas–liquid two-phase jetflows in atomization and sprays. Prog. EnergyCombust. Sci., 2010, 36(2), 131–167.
135 Bellan, J. Perspectives on large eddy simulationsfor sprays: issues and solutions. AtomizationSprays, 2000, 10(3–5), 409–425.
136 Miller, R. S. and Bellan, J. Direct numerical simu-lation and subgrid analysis of a transitional dro-plet laden mixing layer. Phys. Fluids, 2000, 12(3),650–671.
137 Okongo, N. A. and Bellan, J. A priori subgridanalysis of temporal mixing layers with evaporat-ing droplets. Phys. Fluids, 2000, 12(6), 1573–1591.
138 Okongo, N. A. and Bellan, J. Consistent large-eddy simulation of a temporal mixing layer ladenwith evaporating drops. Part 1. Direct numericalsimulation, formulation and a priori analysis. J.Fluid Mech., 2004, 499, 1–47.
139 Okongo, N. A., Leboissetier, A., and Bellan, J.Detailed characteristics of drop-laden mixinglayers: large eddy simulation predictions com-pared to direct numerical simulation. Phys. Fluids,2008, 20, 3479–3493.
140 Vuorinen, V., Larmi, M., and Fuchs, L. Large-eddy simulation on the effect of droplet size dis-tribution on mixing of passive scalar in a spray.SAE paper 2008-01-0933, 2008.
141 Arai, J., Oshima, N., Oshima, M., Ito, H., andKubota, M. Large eddy simulation of spray injec-tion to turbulent flows from a slit nozzle. SAEpaper 2007-01-1403, 2007.
142 Hori, T., Senda, J., Kuge, T., and Fujimoto, H. G.Large eddy simulation of non-evaporative andevaporative diesel spray in constant volume vesselby use of KIVALES. SAE paper 2006-01-3334, 2006.
143 Kamata, S., Nakagawa, H., Hori, T., Senda, J.,and Fujimoto, H. G. Instantaneous and statistical
Large-eddy simulations for internal combustion engines – a review 447
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

structures of non-evaporative diesel spray. SAEpaper 2007-01-1899, 2007.
144 Fujimoto, H., Hori, T., and Senda, J. Effect ofbreakup model on diesel spray structure simu-lated by large eddy simulation. SAE paper 2009-24-0024, 2009.
145 Pannala, S., Menon, S., and Angeles, I. L. OnLEM/LES methodology for two-phase flows. AIAApaper 99-2209, 1999.
146 Bharadwaj, N., Rutland, C. J., and Chang, S.Large eddy simulation modelling of spray-induced turbulence effects. Int. J. Engine Res.,2009, 10(2), 97–119.
147 Bharadwaj, N. and Rutland, C. J. A large eddysimulation study of sub-grid two-phase interac-tion in particle laden flows and diesel enginesprays. Atomization Sprays, 2010, 20(8), 673–695.
148 Stolz, S. and Adams, N. A. An approximatedeconvolution procedure for large-eddy simula-tion. Phys. Fluids, 1999, 11(7), 1699–1701.
149 Villiers, E. de, Weller, H. G., and Gosman, A. D.Large eddy simulation of primary diesel spray ato-mization. SAE paper 2004-01-0100, 2004.
150 Weller, H. G., Tabor, G., Jasak, H., and Fureby, C.A tensorial approach to CFD using object orien-tated techniques. Comput. Phys., 1998, 12(6), 620–628.
151 OpenCFD Limited. OpenFOAM-The Open-sourceCFD toolbox, 2010, available from http://www.openfoam.com/.
152 Befrui, B., Corbinelli, G., Robart, D.,Reckers, W., and Weller, H. G. LES simulation ofthe internal flow and near-field spray structure ofan outward-opening GDi injector and comparisonwith imaging data. SAE paper 2008-01-0137, 2008.
153 Bianchi, G. M., Minelli, F., and Scardovelli, R. 3Dlarge scale simulation of the high-speed liquid jetatomization. SAE paper 2007-01-0244, 2007.
154 Drozda, T. G. and Oefelein, J. Large eddy simula-tion of direct injection processes for hydrogenand LTC engine applications. SAE paper 2008-01-0939, 2008.
155 Martinez, L., Benkenida, A., and Cuenot, B. Amodel for the injection boundary conditions inthe context of 3D simulation of diesel spray:methodology and validation. Fuel, 2010, 89(1),219–228.
156 Reuss, D. L., Kuo, T. -W., Khalighi, B., Haw-orth, D. C., and Rosalik, M. Particle image veloci-metry measurements in a high-swirl engine usedfor evaluation of computational fluid dynamicscalculations. SAE paper 952381, 1995.
157 Reuss, D. L. Cyclic variability of large-scale turbu-lent structures in directed and undirected ICengine flows. SAE paper 2000-01-0246, 2000.
158 Adomeit, P., Lang, O., Pischinger, S., Aym-anns, R., Graf, M., and Stapf, G. Analysis of cyclicfluctuations of charge motion and mixture forma-tion in a DISI engine in stratified operation. SAEpaper 2007-01-1412, 2007.
159 Adolph, D., Rezaei, R., Pischinger, S., Adomeit, P.,Korfer, T., Kolbeck, A., Lamping, M., Tatur, M.,
and Tomazic, D. Gas exchange optimization andthe impact on emission reduction for HSDI dieselengines. SAE paper 2009-01-0654, 2009.
160 Rezaei, R., Pischinger, S., Ewald, J., andAdomeit, P. A new CFD approach for assessmentof swirl flow pattern in HSDI diesel engines. SAEpaper 2010-32-0037, 2010.
161 Vermorel, O., Richard, S., Colin, O., Angel-berger, C., Benkenida, A., and Veynante, D. Mul-ti-cycle LES simulations of flow and combustionin a PFI SI 4-valve production engine. SAE paper2007-01-0151, 2007.
162 Yu, R., Bai, X. S., Lehtiniemi, H., Ahmed, S. S.,Mauss, F., Richter, M., Alden, M., Hildings-son, L., Johansson, B., and Hultqvist, A. Effect ofturbulence and initial temperature inhomogeneityon homogeneous charge compression ignitioncombustion. SAE paper 2006-01-3318, 2006.
163 Yu, R., Joelsson, T., Bai, X. S., and Johansson, B.Effect of temperature stratification on the auto-ignition of lean ethanol / air mixture in HCCIengine. SAE paper 2008-01-1669, 2008.
164 Chumakov, S. G., Rao, S., and Rutland, C. J. Sub-grid scalar mixing and combustion models forlarge-eddy simulation. In 3rd Joint Meeting of theUS Sections of the Combustion Institute, Chicago,pp. 1–5.
165 Lilly, D. K., A proposed modification of the Ger-mano subgrid-scale closure method. Phys. FluidsA, 1992, 4, 633–635.
APPENDIX 1
Notation
k turbulent kinetic energy (RANS)
ksgs subgrid kinetic energy
‘ turbulent eddy length scale
p pressure
ui velocity
Cij tensor coefficient
Ck model coefficient for turbulent viscos-
ity (LES)
Cm model coefficient for turbulent viscos-
ity (RANS)
G LES filtering kernel
Gij gradient coefficient for dynamic struc-
ture model
Lij Leonard term (modified)
Sij strain rate tensor
Tij test filtered subgrid stress
aij test filtered model notation for subgrid
stresses
bij grid filtered model notation for subgrid
stresses
e dissipation rate of turbulent kinetic
energy (RANS)
448 C J Rutland
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from
n kinematic viscosity
nT turbulent kinematic viscosity
f generic scalar
fj generic scalar subgrid flux
r density
tij subgrid stress tensor
trij residual subgrid stress tensor,
solenoidal
D filter length scale; grid cell size scale
Gij viscous stress tensor in the momentum
equation
�� averaged (RANS) or filtered (LES)
quantity
~� Favre averaged (RANS) or Favre filtered
(LES) quantity
�00 fluctuating (RANS) or subgrid (LES)
quantity
� test filtered quantity
Abbreviations
ATDC after top-dead centre
BTDC before top-dead-centre
CA crank angle (in degrees)
CERFACS European Centre for Research and
Advanced Training in Scientific
Computation
CTC characteristic time-scale combustion
model
EGR exhaust gas recirculation
GM TCC General Motors transparent combus-
tion chamber
IFP French Institute of Petroleum
LIF laser induced fluorescence
ODE ordinary differential equation
PDF probability density function
PFI port fuel injected
PIV particle image velocimetry
APPENDIX 2
Basic LES equations
Large-eddy simulation is based on the concept of
filtering (or spatially averaging) flow variables.
Using velocity, ui, as the flow variable, the resolved
component is indicated by an overbar, �ui, and is
defined by the integral filtering operation
u(x)i =
ZG(x, y)u(y)idy (8)
The filter function, G, is a normalized function with
local support and a representative length scale, D,
which is similar to the grid size. The most common
filter functions are Gaussian, box, or triangle func-
tions. For variable density flows, such as in engines,
a density weighted or Favre filtering is defined as
~ui =rui
�r(9)
The total or instantaneous velocity can be decom-
posed into the resolved term and a reminder indi-
cated by a double prime
ui = ~ui + u00i (10)
The resolved terms are so named because they are
the ones that are represented on the LES grid. Note
that they represent locally filtered values and are
not ‘mean’ or ‘ensemble averaged’ values. Thus,
even though the notation is analogous to that used
in RANS modelling, the properties of the LES terms
are different. Most notably, the filtering operation
results in the following properties
��ui 6¼ �ui, ~~ui 6¼ ~ui,gui
99 6¼ 0 (11)
Applying the filtering operation to the incompressi-
ble Navier Stokes momentum equation, and assum-
ing that the filtering operation commutes with the
differential operators, results in the LES equation
∂�r ~ui
∂t+∂�r ~ui ~uj
∂xj= � ∂�p
∂xi+∂Gij
∂xj� ∂�rtij
∂xj(12)
The non-linear term results in the subgrid stresses
that must be modelled
tij[guiuj � ~ui ~uj (13)
The particular form of this term is due in part to
the properties in equation (10). Also, note that even
though only the first term in tij is unknown, the
total term is modelled.
Many modelling approaches relate tij to the strain
rate tensor, Sij, which is divergence free. Thus, the
trace of tij is often written explicitly
tij = trij +
1
3dijtkk (14)
Large-eddy simulations for internal combustion engines – a review 449
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

where, following the notation of Pope [9], trij is the
anisotropic subgrid (or residual) stress tensor. Then,
in practice, the trace is absorbed into the pressure
term and only trij is modelled. Note that this effec-
tively says the subgrid kinetic energy is unknown – a
consequence of modelling the subgrid stresses in
terms of the strain rate tensor.
For a generic scalar, f, the convection term in its
transport equation results in a term similar to tij
that also requires modelling. This term is sometimes
called the subgrid scalar flux or the turbulent scalar
mixing term and has the form
fj = fuj � �f�uj (15)
APPENDIX 3
Scale-similarity and the dynamic approach
The dynamic approach developed by Germano et al.
[11] assumes an additional filtering operation. This
is often termed the ‘test filter.’ It uses a filter func-
tion, GT, which is similar the grid or base level filter,
G, used in equation (8). Often, GT is based on a
larger length scale, 2D is common, but this is not
necessary because of equation (11). A test filtered
quantity is often denoted by a peaked overbar
du(x)i [
ZGT(x, y)u(x)idy (16)
Note, for clarity, constant density is assumed so that
the Favre and conventional filtering are the same.
Using this test filtering operation, one defines a
‘test’ level stress tensor
Tij[duiuj � �ui �uj (17)
that is analogous to the subgrid stress tensor in
equation (13). From these two stress tensors,
Germano developed the following identity
Lij = Tij �ctij (18)
where the left-hand side is
Lij = d�ui �uj � �ui �uj (19)
This quantity is known in the sense that it can be
calculated from the grid level velocities. This tensor
is known as the modified Leonard tensor since it is
similar in form but slightly different from the origi-
nal Leonard tensor. However, this difference is often
overlooked and the expression in equation (19) is
called the Leonard tensor assuming the proper
expression is known by the context in which it is
used.
The dynamic approach uses the Germano iden-
tity in equation (19) as follows. Models are proposed
for both tij and Tij. For simplicity and historical
interest, we use the Smagorinsky model
tij’� 2C1SD2 �S�� ���Sij +
1
3dijtkk
(20)
Tij’� 2C2S 2Dð Þ2 �S��� ��� �Sij +
1
3dijTkk (21)
where we have assumed a test filter size of 2D. Note
that the test level model is similar in form to the
subgrid model. Substituting these two models into
the Germano identity, equation (18) gives
Lij �1
3dijLkk = aijC2S � dbijC1S (22)
where, for notational convenience,
aij = � 2 2Dð Þ2 �S��� ��� �Sij, bij = � 2D2 �S
�� ���Sij (23)
All of the terms in equation (22) are known, except
the model coefficients, C1S and C2S. Thus, the equa-
tion can be used to solve for the coefficients. This is
the essence of the dynamic approach
However, there are still several difficulties [40]. As
written, equation (22) is an integral equation, in this
case, a Fredholm integral equation of the second
kind. Common practice is to assume the coefficient
C1S is slowly varying in space, and can be removed
from the integral that is represented by the peaked
overbar. The next common assumption is that the
two coefficients C1S and C2S are the same. This still
results in an algebraic tensor equation for a single
coefficient. Thus, the problem is over specified, so
the third common assumption is to use a minimiza-
tion procedure to solve for the model coefficient
(see Lilly [165] for details).
To summarize, the dynamic procedure consists
of the following major steps:
1. use of a test filter operation to provide informa-
tion at scales larger, but still near the subgrid
scales;
2. formulate models at the subgrid scale and the
test level scale that have a similar form;
450 C J Rutland
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from

3. use an expression, such as the Germano identity,
that provides a relationship between the models
at the two different scales;
4. substitute the models into the expression that
can be solved for unknown model coefficients.
APPENDIX 4
The dynamic structure approach
The dynamic structure modelling approach devel-
oped by Pomraning and Rutland [40] does not use
the turbulent viscosity concept. Instead, the subgrid
stresses are modelled by a tensor coefficient, Cij,
and the subgrid kinetic energy, ksgs
tij = Cijksgs (24)
where
ksgs =1
2uiui � �ui �uið Þ (25)
The subgrid kinetic energy is obtained from a trans-
port equation. The tensor coefficient is obtained
from the dynamic approach. Assuming the coeffi-
cient can be removed from the filtering integral
gives an algebraic form of the model that is simple
to implement
Cij = 2Lij
Lkk(26)
where Lij is the modified Leonard term from equa-
tion (19). Thus, the subgrid stresses obtain their ten-
sor structure from the normalized modified Leonard
term via the dynamic procedure and their magni-
tude from the subgrid kinetic energy.
As explained here, the dynamic structure model
can be derived using the dynamic procedure.
However, it can also be viewed as a particular form
of a scale-similarity model [30]. The original scale-
similarity model was simply tij= Lij [14]. However,
this approach did not work well and required an
additional viscosity term in what is commonly called
a mixed model. In comparison to the scale-similarity
model, the dynamic model uses the subgrid kinetic
energy to determine the magnitude of the term.
More recent work has resulted in a family of
dynamic structure models (Lu et al. [12, 42]). The
primary insight was to start with equation (24) and
use other formulations for the coefficient tensor.
For example, Lu et al. found that a gradient type
approach results in
Cij = 2Gij
Gkkwhere; Gij =
∂�ui
∂xk
∂�uj
∂xk(27)
This specific form of the dynamic structure model
was shown to work well for simple flows. Testing for
engine applications is currently underway.
The dynamic structure model works very well in
practical applications. It has several important
advantages over standard dynamic viscosity-based
approaches such as T4 and T6.
1. Non-viscosity-based. By not using a turbulent
viscosity approach, the dynamic structure model
is not purely dissipative. This allows local solu-
tions that respond to the local flow conditions –
conditions that are not always dissipative.
2. An energy budget. The dynamic structure model
has a subgrid transport equation for k. This
energy budget keeps the model stable without a
turbulent viscosity. Hence, it is very robust and
works over a wide range of grid resolutions,
including practical situations in which there is
significant energy in the subgrid scales.
3. Good prediction of the subgrid stresses. The com-
ponent structure, spatial distribution, and mag-
nitude of the subgrid stresses, tij, are very well
predicted by this model. This is due to the ten-
sor coefficient that comes directly from using
the stress tensor structure in the dynamic
approach. This makes the new model a very
strong candidate for flows with more complex
physics because the subgrid terms can be used
to build other submodels.
4. Solvability. The mathematical formulation of the
new model is much sounder than the common
dynamic Smagorinsky model. The new model
satisfies basic solvability criteria that other mod-
els do not. Other LES formulations that relate tij
to Sij can be shown to violate solvability criteria
for almost any type of flow. However, the
dynamics structure model relates tij to the sub-
grid kinetic energy and this results in integral
equations that easily satisfy the solvability in
point 3. This sound mathematical formulation
adds robustness to the model so that it works
under a wide variety of flows and grid
resolutions.
Large-eddy simulations for internal combustion engines – a review 451
Int. J. Engine Res. Vol. 12
at UNIV CALIFORNIA DAVIS on May 11, 2014jer.sagepub.comDownloaded from