lapaw
DESCRIPTION
PSECTRANSCRIPT

I. Tujuan1. Memahami prinsip dasar analisis fourier waktu diskrit2. Mengenal sifa-sifat DTFT3. Mampu membuat representasi domain frekuensi suatu sistem LTI dan juga mengeal respon sistem4. Memahami secara detail proses sampling dan rekonstruksi sinyal menggunakan beberapa metoda interpolasi
II. Teori Dasar1. DTFT
Pada dasarnya, metoda transformasi ada dua macam, yang pertama adalah transformasi fourier waktu diskrit (DTFT) dan discrete fourier transform (DFT). DTFT didefinisikan menggunakan penjumlahan tak terbatas dari sinyal waktu diskrit dan hasilnya merupakan fungsi kontinu. Jika x(n) suatu sekuen tak berhingga, kita dapat menghitung Discrete-time Fourier Transform (DTFT), DTFT adalah fungsi kontinu dari frekuensi.
Respon impuls memungkinkan bagi kita untuk menghitung respon input x(n) yang acak menggunakan konvolusi linier seperti yang ditunjukkan dibawah ini :
x(n) y(n)
y(n)=h(n)*x(n), ungkapan konvolusi ini berdasarkan bahwa sinyal apa saja dapat diungkapkan oleh kombinasi linier dari pensekalaan dan penundaan sampel unit. Setiap set basis sinyal menyidiakan satu ungkapan sinyal baru. Setiap ungkapan mempunyai beberapa keuntungan dan kerugian yang bergantung pada tipe sinyal yang sedang dipertimbangkan. Walau demikian , jika sistem itu linier dan time-invarian, hanya satu ungkapan yang dinyatakan paling bermanfaat dan berguna. Ini berdasarkan basis set sinyal eksponensial kompleks {ejwn} dan disebut Discrete-time Fourier Transform.
a. Discrete Time Fourier Transform (DTFT)
Transformasi fourier waktu diskrit adalah suatu representasi skuen eksponensial kompleks ( e-jw) dimana w adalah variabel frekuensi real.Transformasi fourier waktu diskrit waktu diskrit ( e-jw) dari sebuah skuen x(n) di definisikan :
h(n)
Dimana X( e-jw) adalah sebuah fungsi kompleks yang memiliki bagian real , imajiner, magnitude dan fasa. Dapat disimpulkan bahwa x( e-jw) adalah jumlah dari tiap titik frekuensi yang terjadi.
Invers DTFT dari x-jw diberikan oleh :
x (n)=F−1[ X (e jw)]= 12 π
∫−∞
∞
X (e jw)e jwn dω
Operator F[.] mentranformasikan suatu sinyal diskrit x(n) menjadi fungsi kontinu bernilai kompleks X(ejw) dengan variabel riil ω, disebut frekuensi digital yang diukur dalam radian.
b. Two Important Properties
Kita akan menyatakan dua sifat berikut tanpa pembuktian :
Perioditas : discrete-time fourier transform x(ejw) periodik dalam ω dengan perioda 2π.
x ( e jw )=x (e j ( w+2 π )) Imlikasi : kita hanya memerlukan satu perioda dari x(ejw), Simetri :
untuk nilai riil x(n), x(ejw) memerlukan simetri konjugat.c. Sifat-Sifar DFT
Linearitas
Pergeseran waktu (Time shifting)
Pergeseran frekuensi
Konjugasi
Folding
Simetri dalam sekuen riil, x(n) = xe(n) + xo(n)
Jika sekuen x(n) adalah riil dan genap, maka X(ej) juga riil dan genap
Konvolusi
Energi
Perkalian
Suatu sistem linier dan time-invariant dapat diungkapkan menggunakan responnya terhadap sample sekuen unit. Respon ini disebut respon impuls unit h(n) yang memungkinkan bagi kita untuk menghitung respon input x(n) yang acak menggunakan konvolusi linier seperti yang ditunjukkan di bawah ini.:
x(n) y(n)h(n)
F [(αx1 (n) + βx2 (n )] = αF [ x1 (n)] + βF [ x2(n )]F [ x (n−k )] = X (e jω)e− jωk
F [ x( n)ejω0n ] = X (e
j (ω−ω0))
F [ x¿( n)] = X ¿ (e− jω)
F [ x (−n) ] = X ( e− jω)
F [ xo (n )] = j Im [ X (e jω) ]F [ xe(n )] = Re [ X ( e jω)]
F [ x1( n)∗x2 (n )] = F [ x1 (n) ] F [ x2 (n)] = X1 (e jω) X2 (e jω)
F [ x1( n)⋅x2( n)] = F [ x1(n )]∗F [ x2(n )] =Δ 1
2 π∫X 1(e jθ ) X2 (e j(ω−θ )) dθ
Ex =∑−∞
∞|x (n )|2 = 1
2 π∫−π
π
|X (e jω)|2 dω

Setiap set basis sinyal menyediakan satu ungkapan sinyal baru. Setiap ungkapan mempunyai beberapa keuntungan dan beberapa kerugian yang bergantung pada tipe sinyal yang sedang dipertimbangkan. Walau demikian, jika sistem itu linier dan time-invarian, hanya satu ungkapan yang dinyartakan paling bermanfaat atau berguna. Ini berdasarkan basis set sinyal eksponensial kompleksl {ejn} dan disebut Discrete-time Fourier Transform.
d. Ungkapan Domain Frekuensi Dari Sistem LTI Respon Pada Exponential Kompleks
Discrete-time Fourier transform suatu respon impulse disebut Respon Frekuensi (atau Fungsi Transfer) dari suatu sistem LTI yang dituliskan sebagai:
Oleh karena itu sekuen keluaran adalah sekuen input eksponensial termodifikasi oleh respon sistem pada frekuensi o. Pembenaran definisi H(ej) sebagai respon frekuensi karena bagaimana respon dikalikan dengan eksponensial kopleks menghasilkan keluaran y(n). Ini merupakan hasil yang sangat ampuh yang dapat diperluas untuk kombinasi linier suatu eksponensial kompleks menggunakan linieritas dari suatu sistem LTI.
Secara umum, respon frekuensi H(ej) adalah fungsi kompleks dari . Besarnya |H(ej)| dari H(ejw) disebut fungsi respon besaran atau penguatan (magnitude atau gain response function), dan sudut H(ej) disebut fungsi respon fasa ( phase response function).
Respon Pada Sekuen Sinusoidal
H (ejw)
y (n )= h(n )∗ejωo n
=∑−∞
∞
h( k )ejω
o( n−k)
= [∑ h(k )e− jωo k] e
jωo n
= [F [h(n )]|ω=ωo ] ejωon
H (e jωn) =Δ
∑−∞
∞h(n )e− jωn
y (n )= H (ejωon
)× ejωon
x (n )= ejωo n

Misalkan x(n) = A cos(on + o) merupakan suatu input pada suatu sistem LTI h(n). Respon y(n) adalah sinusoid lain dengan frekensi sama o, dengan penguatan amplitude oleh |H(ejo)| dan pergeseran fasa oleh H(ejo), yaitu ,
Respon ini disebut steady-state response dituliskan sebagai yss(n). Ini dapat diperluas pada kombinasi linier sekuen sinosuidal.
Respon Pada Sekuen Sembarang
Misalkan X(ej) = F|x(n)| dan Y(ej) = F|y(n)|; kemudian menggunakan sifat konvolusi, kita mempunyai
Sehingga suatu system LTI dapat diungkapkan dalam domain frekuensi sebagai
Keluaran y(n) kemudian dihitung dari Y(ej) menggunakan inverse discrete-time Fourier transform.
e. Sampling dan Rekosntruksi Dari Sinyal Analog Teorema Sampling
Kebanyakan sinyal di alam ini dalam bentuk analog. Untuk memperolehsinyal diskrit dari sinyal analog harus dilakukan suatu proses yang disebut sampling. Secara matematik, proses sampling dapat dinyatakan oleh persamaan berikut :
x (n )=x (nT )=x ( t ) ,untuk−∞<n<∞(n=integer )
Secara umum n= FFs
Sampling Theorem: Suatu sinyal waktu kontinu, x(t) dapat direkonstruksi
secara unik dari cuplikannya, xs(t), jika dipenuhi dua kondisi:
H(ej
)
Y(ej
) = H(ej
) X(ej
)
X(
ej) H(ej) Y(e
j) = H(e
j) X(e
j)
y (n )= A|H (ejωo)| cos(ωo n + θo + ∠ H (e
jωo ))
∑k
Ak cos (ωk n+θk)
∑k
Ak|H ( ejωk )| cos (ωk n+θk +∠H ( e
jωk ))
1. x(t) harus memiliki pita terbatas dengan frekuensi maximum M
2. Sampling frequency s dari xs(t) harus lebih besar sama dengan 2M, atau s
2M. Kondisi kedua ini dikenal sebagai Kriteria Nyquist. s disebut
Frekuensi Nyquist, yaitu sampling frequency (Frekuensi pencuplikan) terkecil
yang mungkin agar dapat diperoleh kembali sinyal analog asli dari hasil
cuplikannya
Aliasing
Aliasing adalah fenomena yang terjadi jika frekuensi sampling kurang dari
frekuensi Nyquist. Untuk menghindari efek ini, maka frekuensi sampling harus
dua kali lebih besar dari frekuensi sinyal maksimum.
III. Tugas Pendahaluan
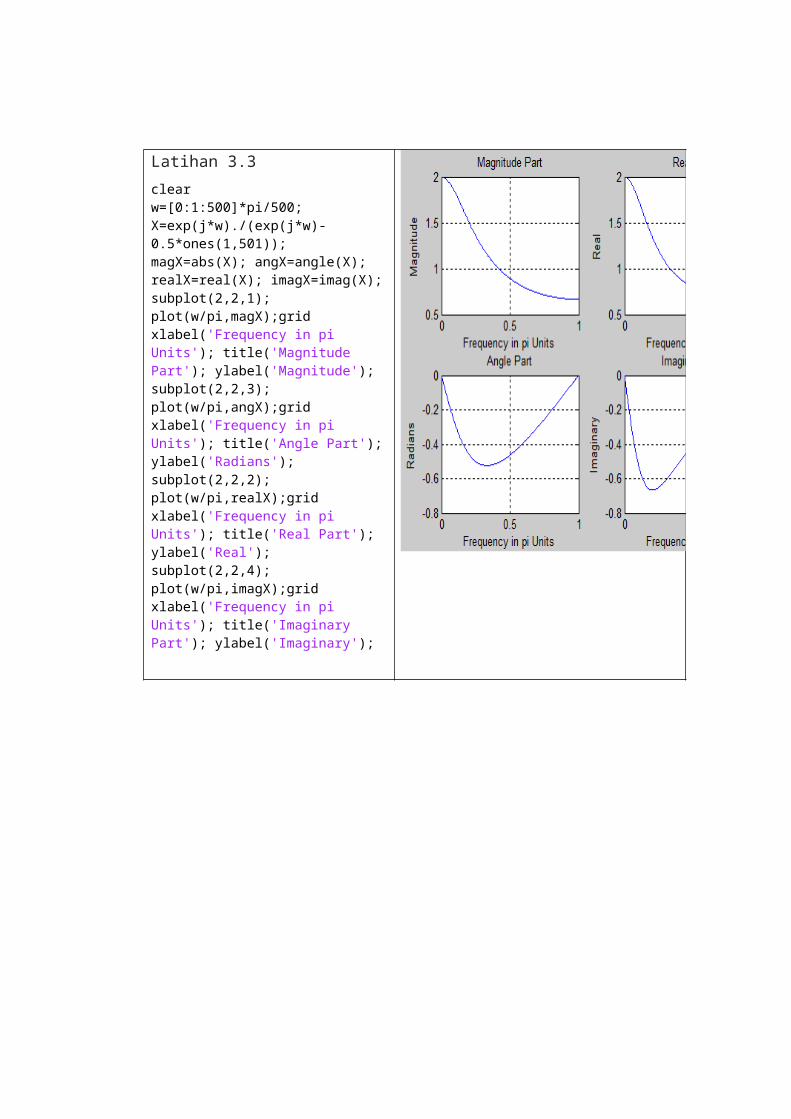
Latihan 3.3
clearw=[0:1:500]*pi/500;X=exp(j*w)./(exp(j*w)-0.5*ones(1,501));magX=abs(X); angX=angle(X);realX=real(X); imagX=imag(X);subplot(2,2,1); plot(w/pi,magX);gridxlabel('Frequency in pi Units'); title('Magnitude Part'); ylabel('Magnitude');subplot(2,2,3); plot(w/pi,angX);gridxlabel('Frequency in pi Units'); title('Angle Part'); ylabel('Radians');subplot(2,2,2); plot(w/pi,realX);gridxlabel('Frequency in pi Units'); title('Real Part'); ylabel('Real');subplot(2,2,4); plot(w/pi,imagX);gridxlabel('Frequency in pi Units'); title('Imaginary Part'); ylabel('Imaginary');

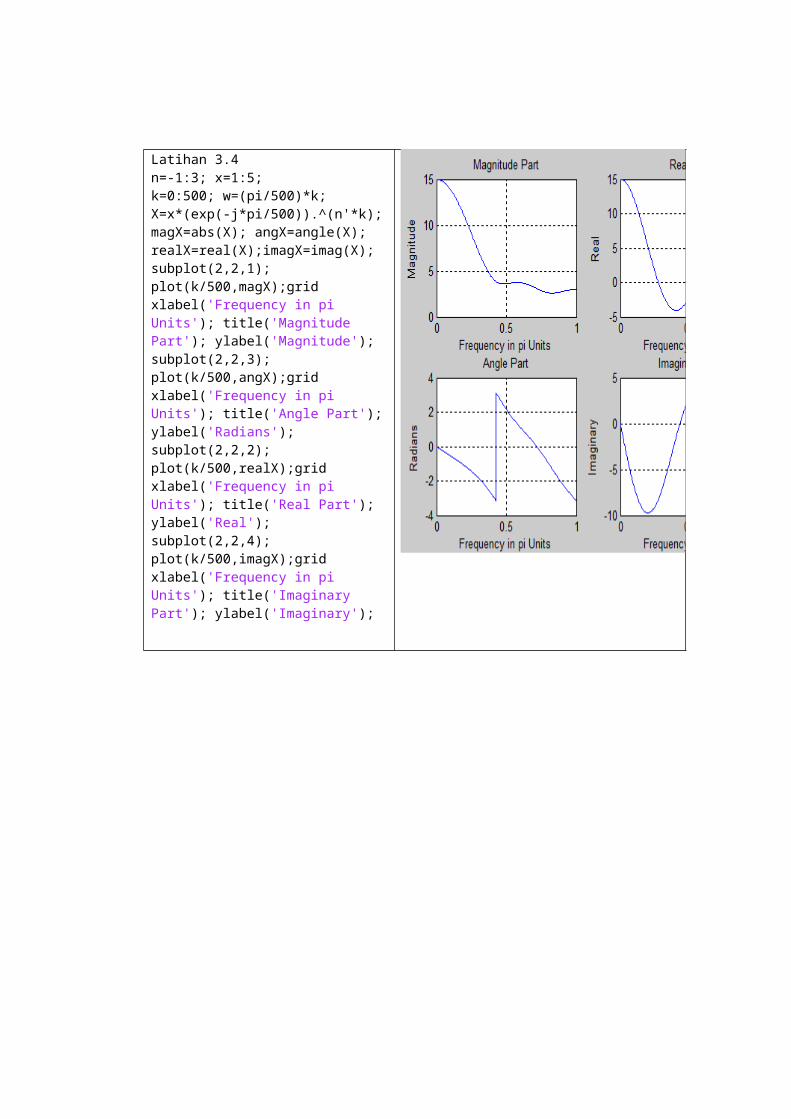
Latihan 3.4n=-1:3; x=1:5;k=0:500; w=(pi/500)*k;X=x*(exp(-j*pi/500)).^(n'*k);magX=abs(X); angX=angle(X);realX=real(X);imagX=imag(X);subplot(2,2,1); plot(k/500,magX);gridxlabel('Frequency in pi Units'); title('Magnitude Part'); ylabel('Magnitude');subplot(2,2,3); plot(k/500,angX);gridxlabel('Frequency in pi Units'); title('Angle Part'); ylabel('Radians');subplot(2,2,2); plot(k/500,realX);gridxlabel('Frequency in pi Units'); title('Real Part'); ylabel('Real');subplot(2,2,4); plot(k/500,imagX);gridxlabel('Frequency in pi Units'); title('Imaginary Part'); ylabel('Imaginary');
Latihan 3.5
n=0:10; x=(0.9*exp(j*pi/3)).^n;k=-200:200; w=(pi/100)*k;X=x*(exp(-j*pi/100)).^(n'*k);magX=abs(X); angX=angle(X);subplot(2,1,1); plot(w/pi,magX);gridxlabel('Frequency in pi Units'); title('Magnitude Part'); ylabel('|X|');subplot(2,1,2); plot(w/pi,angX);gridxlabel('Frequency in pi Units'); title('Angle Part'); ylabel('Radians/pi');
Latihan 3.6
n=-5:5; x=(-0.9).^n;k=-200:200; w=(pi/100)*k;X=x*(exp(-j*pi/100)).^(n'*k);magX=abs(X); angX=angle(X);subplot(2,1,1); plot(w/pi,magX);gridxlabel('Frequency in pi Units'); title('Magnitude Part'); ylabel('|X|');subplot(2,1,2); plot(w/pi,angX);gridxlabel('Frequency in pi Units'); title('Angle Part'); ylabel('Radians/pi');
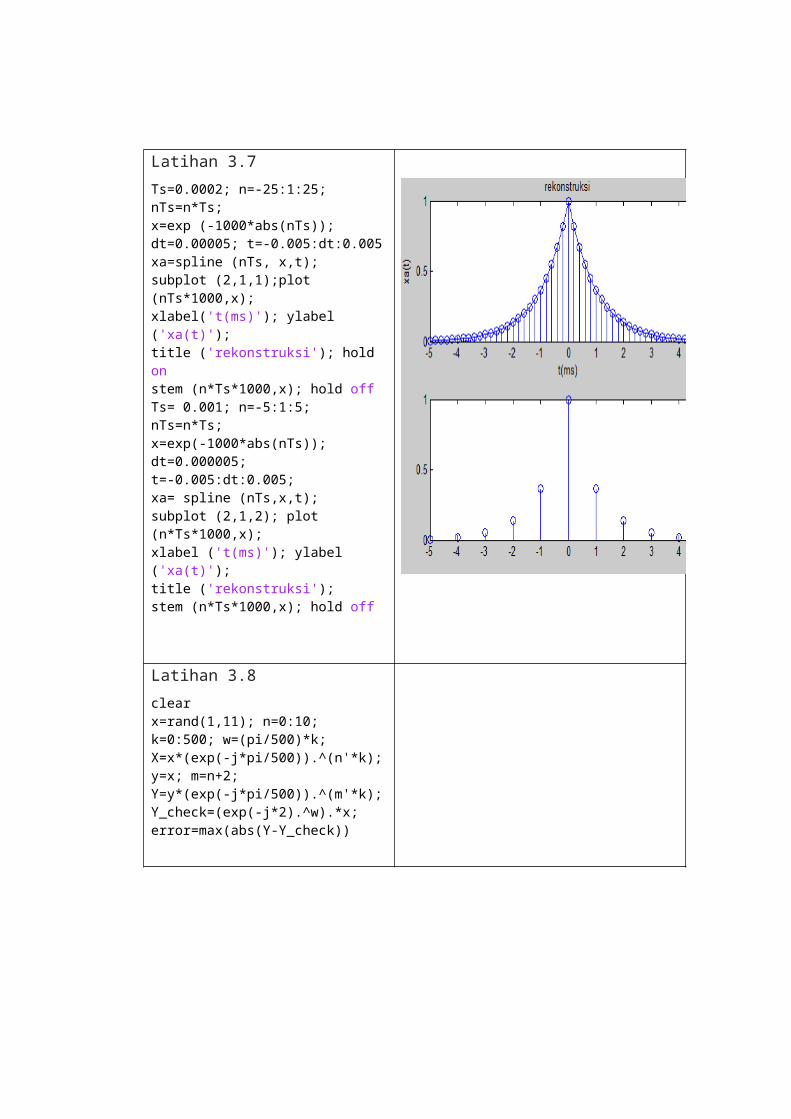
Latihan 3.7
Ts=0.0002; n=-25:1:25; nTs=n*Ts;x=exp (-1000*abs(nTs));dt=0.00005; t=-0.005:dt:0.005xa=spline (nTs, x,t);subplot (2,1,1);plot (nTs*1000,x);xlabel('t(ms)'); ylabel ('xa(t)');title ('rekonstruksi'); hold onstem (n*Ts*1000,x); hold offTs= 0.001; n=-5:1:5; nTs=n*Ts;x=exp(-1000*abs(nTs));dt=0.000005;t=-0.005:dt:0.005;xa= spline (nTs,x,t);subplot (2,1,2); plot (n*Ts*1000,x);xlabel ('t(ms)'); ylabel ('xa(t)');title ('rekonstruksi');stem (n*Ts*1000,x); hold off
Latihan 3.8
clearx=rand(1,11); n=0:10;k=0:500; w=(pi/500)*k;X=x*(exp(-j*pi/500)).^(n'*k);y=x; m=n+2;Y=y*(exp(-j*pi/500)).^(m'*k);Y_check=(exp(-j*2).^w).*x;error=max(abs(Y-Y_check))

Latihan 3.9
n=0:100; x=cos(pi*n/2);k=-100:100; w=(pi/100)*k;X=x*(exp(-j*pi/100)).^(n'*k);y=exp(j*pi*n/4).*x;Y=y*(exp(-j*pi/100)).^(n'*k);subplot(2,2,1); plot(w/pi,abs(X)); grid; axis([-1,1,0,60]);xlabel('Frequency in pi units'); ylabel('|X|');title('Magnitude of X');subplot(2,2,2); plot(w/pi,angle(X)); grid; axis([-1,1,-1,1]);xlabel('Frequency in pi units'); ylabel('Radians/pi');title('Angle of X');subplot(2,2,3); plot(w/pi,abs(Y)); grid; axis([-1,1,0,60]);xlabel('Frequency in pi units'); ylabel('|Y|');title('Magnitude of Y');subplot(2,2,4); plot(w/pi,angle(Y)); grid; axis([-1,1,-1,1]);xlabel('Frequency in pi units'); ylabel('Radians/pi');title('Angle of Y');
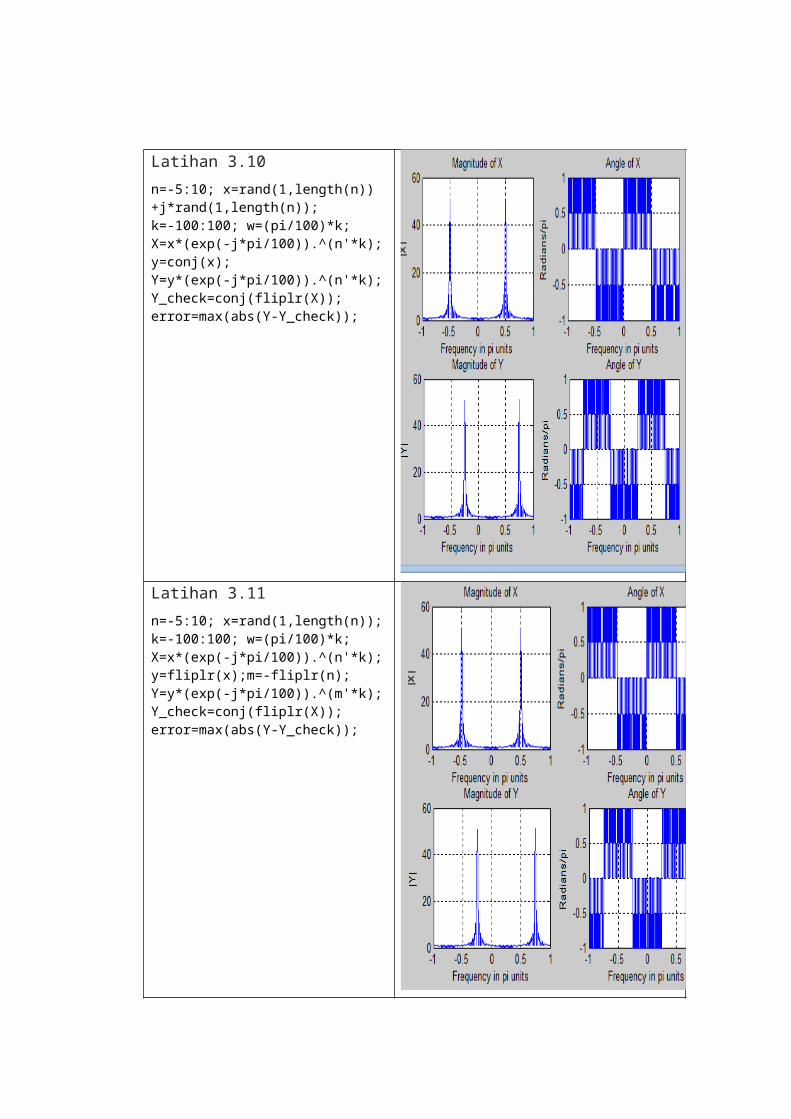
Latihan 3.10
n=-5:10; x=rand(1,length(n))+j*rand(1,length(n));k=-100:100; w=(pi/100)*k;X=x*(exp(-j*pi/100)).^(n'*k);y=conj(x);Y=y*(exp(-j*pi/100)).^(n'*k);Y_check=conj(fliplr(X));error=max(abs(Y-Y_check));
Latihan 3.11
n=-5:10; x=rand(1,length(n));k=-100:100; w=(pi/100)*k;X=x*(exp(-j*pi/100)).^(n'*k);y=fliplr(x);m=-fliplr(n);Y=y*(exp(-j*pi/100)).^(m'*k);Y_check=conj(fliplr(X));error=max(abs(Y-Y_check));

Latihan 3.12
n=-5:10; x=sin(pi*n/2);k=-100:100; w=(pi/100)*k;X=x*(exp(-j*pi/100)).^(n'*k);[xe,xo,m]=gnapgnjil(x,n);XE=xe*(exp(-j*pi/100)).^(m'*k);XO=xo*(exp(-j*pi/100)).^(m'*k);XR=real(X);error1=max(abs(XE-XR));XI=imag(X);error2=max(abs(XO-j*XI));subplot(2,2,1); plot(w/pi,XR); grid; axis([-1,1,-2,2]);xlabel('Frequency in pi units'); ylabel('Re(X)');title('Bagian riil dari X');subplot(2,2,2); plot(w/pi,XI); grid; axis([-1,1,-10,10]);xlabel('Frequency in pi units'); ylabel('Im(X)');title('Bagian imajiner dari X');subplot(2,2,3); plot(w/pi,real(XE)); grid; axis([-1,1,-2,2]);xlabel('Frequency in pi units'); ylabel('XE');title('Transformasi dari bagian genap');subplot(2,2,4); plot(w/pi,imag(XO)); grid; axis([-1,1,-10,10]);xlabel('Frequency in pi units'); ylabel('XO');title('Transformasi dari bagian ganjil');
Latihan 3.13
w=[0:1:500]*pi/500;H=exp (j*w)./ (exp(j*w)-0.9*ones (1,501));magH= abs(H); angH=angle (H);subplot (2,1,1); plot (w/pi,magH); grid on;xlabel ('frekuensi dalam in pi unit');ylabel ('H');title ('magnitude respon');subplot (2,1,2); plot (w/pi, angH/pi);grid on;xlabel ('frekuensi dalam in pi unit');ylabel ('H');title ('phase respon');
Latihan 3.15
clear allclc
b=1;a=[1,-0.8];n=[0:100]; x= cos (0.05*pi*n);y=filter (b,a,x);subplot (2,1,1); stem (n,x);xlabel ('n'); ylabel ('x(n)'); title ('sekuen input');subplot (2,1,2); stem (n,x);xlabel ('n'); ylabel ('x(n)'); title ('sekuen output');

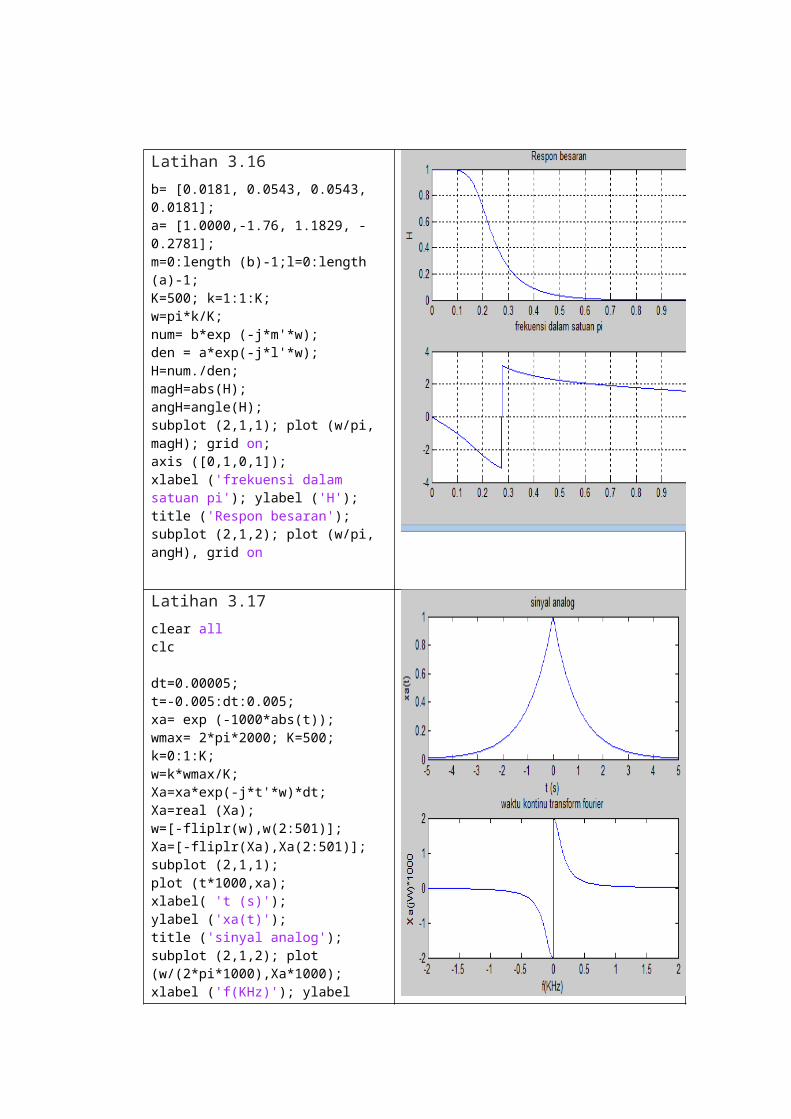
Latihan 3.16
b= [0.0181, 0.0543, 0.0543, 0.0181];a= [1.0000,-1.76, 1.1829, -0.2781];m=0:length (b)-1;l=0:length (a)-1;K=500; k=1:1:K;w=pi*k/K;num= b*exp (-j*m'*w);den = a*exp(-j*l'*w);H=num./den;magH=abs(H);angH=angle(H);subplot (2,1,1); plot (w/pi, magH); grid on;axis ([0,1,0,1]);xlabel ('frekuensi dalam satuan pi'); ylabel ('H'); title ('Respon besaran');subplot (2,1,2); plot (w/pi, angH), grid on
Latihan 3.17
clear allclc
dt=0.00005;t=-0.005:dt:0.005;xa= exp (-1000*abs(t));wmax= 2*pi*2000; K=500;k=0:1:K;w=k*wmax/K;Xa=xa*exp(-j*t'*w)*dt;Xa=real (Xa);w=[-fliplr(w),w(2:501)];Xa=[-fliplr(Xa),Xa(2:501)];subplot (2,1,1);plot (t*1000,xa);xlabel( 't (s)');ylabel ('xa(t)');title ('sinyal analog');subplot (2,1,2); plot (w/(2*pi*1000),Xa*1000);xlabel ('f(KHz)'); ylabel ('Xa(jW)*1000');title ('waktu kontinu transform fourier');

Latihan 3.18
dt=0.00005; t=-0.005:dt:0.005; xa=exp(-1000*abs(t));ts=0.0002; n=-5:1:5; x= exp (-1000*abs(n*ts));K=500; k=0:1:K; w=pi*k/K;X=x*exp (-j*n'*w); X=real(X);w=[-fliplr(w), w(2:K+1)];X=[fliplr (X), X(2:K+1)];subplot (2,1,1); plot (t*1000,xa);xlabel ('t (ms)'); ylabel ('xl (n)');title ('sinyal diskrit'); hold onstem (n*ts*1000,x); gtext ('Ts=0.2 ms'); hold offsubplot (2,1,2); plot (w/pi,X);xlabel ('f (pi)'); ylabel ('Xl(w)');title ('waktu diskrit transformasi fourier');
dt=0.00005; t=-0.005:dt:0.005; xa=exp(-1000*abs(t));ts=0.0001; n=-5:1:5; x= exp (-1000*abs(n*ts));K=500; k=0:1:K; w=pi*k/K;X=x*exp (-j*n'*w); X=real(X);w=[-fliplr(w), w(2:K+1)];X=[fliplr (X), X(2:K+1)];subplot (2,1,1); plot (t*1000,xa);xlabel ('t (ms)'); ylabel ('xl (n)');title ('sinyal diskrit'); hold onstem (n*ts*1000,x); gtext ('Ts=0.2 ms'); hold offsubplot (2,1,2); plot (w/pi,X);xlabel ('f (pi)'); ylabel ('Xl(w)');title ('waktu diskrit transformasi fourier');
Latihan 3.20Ts=0.0002;n=-25:1:25;nTs=n*Ts;x=exp (-1000*abs(nTs));
Fs=1/Ts;dt=0.00005; t=-0.00005:dt:0.00005;xa=sinc (Fs*ones (length (n),1)*t-nTs'*ones (1,length (t)));
yyy= exp(-1000*abs(t));www=(xa-yyy)error= max(abs(www));
Latihan 3.21
Ts=0.0002; n=-25:1:25; nTs=n*Ts;x=exp (-1000*abs(nTs));subplot (2,1,1); stairs (nTs*1000,x);xlabel ('t (ms)');ylabel ('xa(t)');title ('rekonstruksi sinyal');hold on;stem (n*Ts*1000,x); hold offTs= 0.001; n=-5:1:5; nTs=n*Ts;x=exp (-1000*abs (nTs));subplot (2,1,2); stairs (nTs*1000,x);xlabel ('t (ms)'); ylabel ('xa(t)');title (' rekonstruksi'); hold onstem (n*Ts*1000,x); hold off
Ts=0.0002; n=-25:1:25; nTs=n*Ts;x=exp (-1000*abs(nTs));subplot (2,1,1); stairs (nTs*1000,x);xlabel ('t (ms)');ylabel ('xa(t)');title ('rekonstruksi sinyal');hold on;stem (n*Ts*1000,x); hold offTs= 0.001; n=-5:1:5; nTs=n*Ts;x=exp (-1000*abs (nTs));subplot (2,1,2); plot(nTs*1000,x);

xlabel ('t (ms)'); ylabel ('xa(t)');title (' rekonstruksi'); hold onstem (n*Ts*1000,x); hold on
Latihan 3.22
Ts=0.0002; n=-25:1:25; nTs=n*Ts;x=exp (-1000*abs(nTs));dt=0.00005; t=-0.005:dt:0.005xa=spline (nTs, x,t);subplot (2,1,1);plot (nTs*1000,x);xlabel('t(ms)'); ylabel ('xa(t)');title ('rekonstruksi'); hold onstem (n*Ts*1000,x); hold offTs= 0.001; n=-5:1:5; nTs=n*Ts;x=exp(-1000*abs(nTs));dt=0.000005;t=-0.005:dt:0.005;xa= spline (nTs,x,t);subplot (2,1,2); plot (n*Ts*1000,x);xlabel ('t(ms)'); ylabel ('xa(t)');title ('rekonstruksi');stem (n*Ts*1000,x); hold off

Daftar Pusataka
I Made Joni. 2015. Modul Praktikum Pengolahan Sinyal Elektronika dan Citra.
Jatinangor : Unpad
Referensi :
Training and Research Center for Scientific & Industrial Instrumentation