konzeption, entwicklung & evaluation eines adaptiven ... · abschlussarbeit im studiengang...
TRANSCRIPT
Abschlussarbeit
im Studiengang Master Informatik
Konzeption, Entwicklung & Evaluationeines adaptiven multispektralen
Sensorsystems
von
Tobias Scheer
Erstprufer: Prof. Dr.-Ing. Norbert JungZweitprufer: Prof. Dr. Dietmar Reinert
Eingereicht am: 13. Oktober 2016


Zusammenfassung
Seit uber zehn Jahren wird an der Hochschule Bonn-Rhein-Sieg an hauterkennender optischerSensorik geforscht, um z. B. die Arbeitssicherheit an handbeschickten Werkmaschinen zuverbessern. Die verschiedenen Sensoriken verwenden fur die Material- bzw. Hauterkennungsogenannte spektrale Signaturen, welche aus den fur diese Anwendung ausgewahlten Remissions-informationen schmaler Wellenlangenbander bestehen. In den bisherigen Entwicklungen wurdendiese sequentiell fur jede der verwendeten Wellenlangen des multispektralen Sensorsystemserfasst. Dies hatte zur Folge, dass die Messergebnisse recht anfallig fur Umgebungseinflussesind (wie z. B. andere Sensoren der gleichen Art). Daher ist in einer neuen Sensorgeneration einMessprinzip auf Basis eines Lock-In-Verstarkers umgesetzt worden, in welchem die Messungder Remissionsinformationen von dem Zeitbereich in den Frequenzbereich verschoben wurde.
Die hierfur eingesetzte digitale Signalverarbeitung ermoglicht eine Frequenzanalyse des Mess-signals, wodurch das Sensorsystem in die Lage versetzt wird, ungunstige Messbedingungen,welche die Sicherheitsfunktion des Sensors beeintrachtigen, selbststandig festzustellen. Daherwird in dieser Arbeit untersucht, ob mit einer adaptiven Sensorkonfiguration die externenEinflusse minimiert werden konnen, um die Schutzfunktion des Sensors auch bei ungunstigenMessbedingungen zu gewahrleisten. Weiterhin wird die digitale Signalverarbeitungskette verbes-sert und um eine Sensorkalibration und zusatzliche Merkmalsraume fur die Materialerkennungerweitert, welche aus den Remissionsinformationen generiert werden. Da die VerbesserungenOptimierungen eines realen Sensorsystems behandeln, wird die Evaluation der entwickeltenVerfahren anhand von Messdaten des Sensors durchgefuhrt.
Mit sogenannten Frequenzsweeps wird eine Beschreibung des frequenzabhangigen Verhaltensdes Sensors erreicht. Aus den Messdaten eines Frequenzsweeps kann eine Sensorkalibrationermittelt werden, welche die aktuelle Konfiguration des Sensorsystems berucksichtigt undeine Vorbereitung fur einen adaptiven Konfigurationswechsel darstellt. Die Kalibration soll derfrequenzabhangigen Dampfung der analogen Signalverarbeitung und dem direkten Ubersprechendes Senders auf den Empfanger entgegen wirken. Die Materialklassifikation in dem Sensorsystemwird anhand von Merkmalsraumen durchgefuhrt. Es wurden in der Vergangenheit verschiedeneMerkmalsraume eingesetzt, die in dieser Arbeit miteinander verglichen werden, um fur zukunftigeEntwicklungen eine begrundete Auswahl treffen zu konnen.
In der Evaluation werden die Reaktionsmoglichkeiten auf die zuvor analysierten ungunstigenMessbedingungen bestatigt. Eine aufgrund verschiedener Messabstande und Materialien schwan-kende Signalstarke lasst sich mit einer adaptiven analogen Verstarkung in Grenzen kompensieren.Mit Messungen bei verschiedenen Distanzen gelingt es, diese Grenzen zu identifizieren und durchdie beschriebene Kalibration ist es moglich, die zuverlassige Messdistanz zu vergroßern. Externeoptische Storsignale konnen mit einer adaptiven Sensorkonfiguration erkannt und beherrschtwerden, das Sensorsystem ist somit in der Lage, seine Schutzfunktion in einer Umgebung mitvergleichbaren Sensoren aufrecht zu erhalten.
iii


Inhaltsverzeichnis
Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Problemstellung & Ziele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Abgrenzung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Stand der Forschung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.1 Externe Forschung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1 Optische Hauterkennung . . . . . . . . . . . . . . . . . . . . . . . . . 32.1.2 Optische Sensorik mit Lock-In-Verstarker . . . . . . . . . . . . . . . . 4
2.2 Forschung an der Hochschule Bonn-Rhein-Sieg . . . . . . . . . . . . . . . . . 5
3 Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.1 Hauterkennung mittels optischer Sensorik . . . . . . . . . . . . . . . . . . . . 7
3.1.1 Physikalische Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . 73.1.2 Optoelektronik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.1.3 Sensorkonzepte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2 Digitale Signalverarbeitung . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.2.1 Abtasttheorem & Uberabtastung . . . . . . . . . . . . . . . . . . . . 153.2.2 Signalqualitat, Prazision & Genauigkeit . . . . . . . . . . . . . . . . . 163.2.3 Diskrete Fourier-Transformation . . . . . . . . . . . . . . . . . . . . . 173.2.4 Digitale Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.3 Lock-In-Verstarker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.3.1 Theorie & Anwendungsbereiche . . . . . . . . . . . . . . . . . . . . . 233.3.2 Implementierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.3.3 Multichannel Lock-In-Detektion . . . . . . . . . . . . . . . . . . . . . 25
3.4 Maschinelles Lernen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.4.1 Entscheidungsbaume . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.4.2 Beurteilung von Klassifikatoren . . . . . . . . . . . . . . . . . . . . . 28
4 Analyse & Konzeption . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.1 Sensorsystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.1.1 Funktionale Beschreibung . . . . . . . . . . . . . . . . . . . . . . . . 324.1.2 Optische Analyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.1.3 Analoge Signalverarbeitung . . . . . . . . . . . . . . . . . . . . . . . 35
4.2 Sensorparameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.2.1 Trager- & Referenzsignale . . . . . . . . . . . . . . . . . . . . . . . . 364.2.2 Parameterauswahl . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.3 Beherrschung ungunstiger Messbedingungen . . . . . . . . . . . . . . . . . . 39
v

Inhaltsverzeichnis
4.3.1 Unpassende Signalstarke . . . . . . . . . . . . . . . . . . . . . . . . . 394.3.2 Partielles Messfenster . . . . . . . . . . . . . . . . . . . . . . . . . . 404.3.3 Externe optische Storsignale . . . . . . . . . . . . . . . . . . . . . . . 42
5 Entwicklung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.1 Basis-Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.1.1 C-Bibliothek (libLoki) . . . . . . . . . . . . . . . . . . . . . . . . . . 455.1.2 Embedded-Software . . . . . . . . . . . . . . . . . . . . . . . . . . . 465.1.3 Desktop-Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.2 Signalverarbeitungskette . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 495.2.1 Vorverarbeitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.2.2 Signaldetektion (Lock-In-Verstarker) . . . . . . . . . . . . . . . . . . 515.2.3 Nachverarbeitung (Sensorkalibration) . . . . . . . . . . . . . . . . . . 525.2.4 Berechnung der Materialerkennungsmerkmale . . . . . . . . . . . . . . 53
6 Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 576.1 Sensorkonfiguration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
6.1.1 Charakteristik der realen Tragersignale . . . . . . . . . . . . . . . . . 576.1.2 Auswahl der Sensorparameter . . . . . . . . . . . . . . . . . . . . . . 586.1.3 Sensorkalibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
6.2 Vergleich der Materialerkennungsmerkmalsraume . . . . . . . . . . . . . . . . 626.3 Maximale Sensordistanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.3.1 Distanzmessung mit Haut . . . . . . . . . . . . . . . . . . . . . . . . 656.3.2 Distanzmessung mit Papierreferenz . . . . . . . . . . . . . . . . . . . 66
6.4 Beherrschung ungunstiger Messbedingungen . . . . . . . . . . . . . . . . . . 676.4.1 Unpassende Signalstarke . . . . . . . . . . . . . . . . . . . . . . . . . 686.4.2 Externe optische Storsignale . . . . . . . . . . . . . . . . . . . . . . . 69
7 Fazit & Ausblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Literaturverzeichnis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Anhang
A Anhang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77A.1 Visualisierungen realer Messdaten . . . . . . . . . . . . . . . . . . . . . . . . 77A.2 Laufzeitmessung (Time-of-Flight) . . . . . . . . . . . . . . . . . . . . . . . . 79A.3 Details zur Desktop-Software . . . . . . . . . . . . . . . . . . . . . . . . . . 80A.4 Vergleich der Materialerkennungsmerkmalsraume . . . . . . . . . . . . . . . . 87
B Digitaler Anhang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
C Eidesstattliche Erklarung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
vi

Tabellenverzeichnis
1 Symbolnotation und -bedeutung . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii2 Konstanten in dieser Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
3.1 Aufbau Konfusionsmatrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.1 Zusammenfassung der verwendeten NIR-LEDs zur Materialerkennung . . . . . . . 34
6.1 Uberblick der verwendeten Materialien fur das maschinelle Lernen . . . . . . . . . 626.2 PD 0 - Vergleich der Materialerkennungsmerkmalsraume . . . . . . . . . . . . . . 63
A.1 PD 1 - Vergleich der Materialerkennungsmerkmalsraume . . . . . . . . . . . . . . 87A.2 PD 2 - Vergleich der Materialerkennungsmerkmalsraume . . . . . . . . . . . . . . 87A.3 PD 3 - Vergleich der Materialerkennungsmerkmalsraume . . . . . . . . . . . . . . 87A.4 PD 4 - Vergleich der Materialerkennungsmerkmalsraume . . . . . . . . . . . . . . 87
vii


Abbildungsverzeichnis
3.1 Remissionsspektren verschiedener exemplarischer Materialien [Sch13] . . . . . . . 83.2 Falschfarbenbild der verschiedenen Hauttypen nach Fitzpatrick [Ste16] . . . . . . 83.3 Typische Spektralverteilung einer LED ohne Nachfilterung . . . . . . . . . . . . . 103.4 Spektrale Empfindlichkeit verschiedener Halbleitermaterialien nach [Her+06, S. 94] 123.5 Vergleich der verschiedenen Messprinzipien . . . . . . . . . . . . . . . . . . . . . 133.6 Schema Amplitudenmodulation mit Frequenzmultiplex . . . . . . . . . . . . . . . 143.7 Klassisches Verarbeitungsschema digitaler Filter nach [Tie+02, S. 1019] . . . . . . 153.8 MATLAB®-Simulation: Beispiel eines Leck-Effektes . . . . . . . . . . . . . . . . 183.9 Typische Frequenzantwort eines Tiefpassfilters . . . . . . . . . . . . . . . . . . . 203.10 Frequenzantwort eines 10-Punkt gleitenden Mittelwertes (FIR 9. Ordnung) . . . . 213.11 Vergleich bekannter IIR-Filter 4. Ordnung (fc = 0, 2) . . . . . . . . . . . . . . . . 223.12 Anwendungsbeispiel Lock-In-Verstarker [Oro14] . . . . . . . . . . . . . . . . . . . 233.13 Dual-Phase Lock-In-Verstarker [Oro14] . . . . . . . . . . . . . . . . . . . . . . . 243.14 MATLAB®-Simulation: Schwebungsbeispiel . . . . . . . . . . . . . . . . . . . . 26
4.1 Sensor Frontansicht (Ringlicht und Empfangerlinse) . . . . . . . . . . . . . . . . 314.2 Innerer Aufbau des Sensorsystems . . . . . . . . . . . . . . . . . . . . . . . . . . 324.3 Funktionsblockschaltbild des Sensorsystems . . . . . . . . . . . . . . . . . . . . . 334.4 Analoge Signalkonditionierung vor der Quantisierung . . . . . . . . . . . . . . . . 354.5 MATLAB®-Simulation: Partielles Messfenster . . . . . . . . . . . . . . . . . . . 41
5.1 Architektur der Embedded Software . . . . . . . . . . . . . . . . . . . . . . . . . 465.2 Blockschaltbild der Signalverarbeitung . . . . . . . . . . . . . . . . . . . . . . . 50
6.1 Harmonische des realen Tragersignals (fs = 200 kHz, Nw = 200) . . . . . . . . . 576.2 Unskalierte FRC-Kalibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 596.3 Papierreferenz bei hoher Abtastrate - fs = 800 kHz . . . . . . . . . . . . . . . . . 606.4 Skalierte FRC-Kalibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 606.5 NRC-Kalibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 616.6 Haufigkeitsverteilung der Betrage . . . . . . . . . . . . . . . . . . . . . . . . . . 636.7 Haufigkeitsverteilung der Merkmalsraume durch Kombination zweier Wellenlangen 646.8 Haufigkeitsverteilung der Merkmalsraume durch Kombination dreier Wellenlangen 646.9 Hautmessungen bei verschiedenen Distanzen . . . . . . . . . . . . . . . . . . . . 666.10 Papierreferenzmessungen bei verschiedenen Distanzen . . . . . . . . . . . . . . . 676.11 Beispiel fur eine Ubersteuerung und eine (adaptive) Reaktionsmoglichkeit . . . . . 686.12 Ungestorte Messung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 696.13 Leck-Effekte durch Storsignal auf f = 21,5 kHz . . . . . . . . . . . . . . . . . . . 696.14 Beispiel fur einen (adaptiven) Frequenzwechsel . . . . . . . . . . . . . . . . . . . 70
A.1 Typische Messdaten von Holz und Haut bei 20 cm Messabstand . . . . . . . . . . 77A.2 Vorverarbeitung (Halbierung der Messdaten): Einschwingverhaltens des IIR-Filters 78
ix

Abbildungsverzeichnis
A.3 Beispiel eines Leck-Effekts bei falscher Parameterauswahl . . . . . . . . . . . . . 78A.4 Schwebungsbeispiel mit realen Messdaten . . . . . . . . . . . . . . . . . . . . . . 79A.5 Desktop Software: MainWindow . . . . . . . . . . . . . . . . . . . . . . . . . . 81A.6 Desktop Software: Text Plot . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82A.7 Desktop Software: Hautmessung im Zeitbereich (Time Plot) . . . . . . . . . . . . 83A.8 Desktop Software: Hautmessung im Frequenzbereich (FFT Plot) . . . . . . . . . 83A.9 Desktop Software: Sensorkalibration (Signal Chain Plot) . . . . . . . . . . . . . . 84A.10 Desktop Software: Lock-In-Verstarker (Signal Chain Plot) . . . . . . . . . . . . . 84A.11 Desktop-Software: Measurement Control . . . . . . . . . . . . . . . . . . . . . . 85A.12 Desktop-Software: Measurement Collector . . . . . . . . . . . . . . . . . . . . . 86
x

Abkurzungsverzeichnis
ACC Accuracy
ADC Analog-to-Digital Converter
ARM Advanced RISC Machine
CART Classification And Regression Tree
CDC Communication Device Class
CMSIS Cortex Microcontroller Software Interface Standard
CPU Central Processing Unit
CRC Cyclic Redundancy Check
CSMA/CD Carrier Sense Multiple Access/Collision Detection
CSV Comma Separated Values
DAC Digital-to-Analog Converter
DFT Discrete Fourier Transform
DMA Direct Memory Access
DSP Digital Signal Processor
FWHM Full Width at Half Maximum
FIR Finite Impulse Response
FFT Fast Fourier Transform
FNR False Negative Rate
FPR False Positive Rate
FPU Floating Point Unit
GUI Graphical User Interface
HAL Hardware Abstraction Layer
ID3 Iterative Dichotomiser 3
IIR Infinite Impulse Response
InGaAs Indiumgalliumarsenid
InP Indiumphosphid
ISF Institut fur Sicherheitsforschung
LED Light Emitting Diode
LTI Linear Time-Invariant
NDVI Normalized Differenced Vegetation Index
NIR Near Infrared
OCT Optical Coherence Tomography
xi

Abkurzungsverzeichnis
PC Personal Computer
PD Photodiode
PGA Programmable Gain Amplifier
PREC Precision
PWM Pulse-Width Modulation
SNR Signal-to-Noise-Ratio
ToF Time-of-Flight
UART Universal Asynchronous Receiver Transmitter
USB Universal Serial Bus
xii

Konventionen
Symbol Bedeutung
x,X SkalarX Mengex Spaltenvektor, eindimensionales Signalx[i] Element an der i-iten Stelle des VektorsF Funktion
Tabelle 1: Symbolnotation und -bedeutung
Konstante Bedeutung
fs AbtastrateNw Anzahl der Messpunkte im Messfenster (Fenstergroße)tw Messzeit fur ein komplettes Messfensterfm, fmi
(LED-)Modulationsfrequenz(en)f1020 nm LED1020 nm-Modulationsfrequenzf1200 nm LED1200 nm-Modulationsfrequenzf1550 nm LED1550 nm-Modulationsfrequenz
Tabelle 2: Konstanten in dieser Arbeit
xiii


1 Einleitung
1.1 Motivation
Jedes Jahr geschehen Unfalle an handbeschickten Maschinen, die schwere Verletzungen derAnwender und große okonomische Schaden verursachen. Alleine in der deutschen Berufsgenos-senschaft Holz-Metall gab es im Jahre 2014 155.771 Arbeitsunfalle, welche als Auswirkung2.244 neue Unfallrenten und 56 Todesfalle zur Folge hatten. Daher ist es nicht verwunderlich,dass im Jahre 2014 mehr als drei Viertel der Ausgaben dieser Berufsgenossenschaft fur Reha-und Entschadigungsleistungen verwendet wurden. In den Statistiken der Deutschen GesetzlichenUnfallversicherung e.V. ist zu erkennen, dass sich die Arbeitsunfalle zwischen den Jahren 1995und 2014 fast halbiert haben. Wahrend in der ersten Halfte dieser Zeitspanne die großteAbnahme zu beobachten ist, so halten sich die Unfallzahlen in der zweiten Halfte auf einemhohen Niveau. Dies konnte ein Indiz dafur sein, dass zusatzliche schutzende Maßnahmen sinnvollsind, um die Unfallzahlen noch weiter reduzieren zu konnen. [BGH14] [Ue14]
Um die Arbeitssicherheit in solchen Bereichen zu verbessern, wird bereits seit einigen Jahrenam Institut fur Sicherheitsforschung (ISF) der Hochschule Bonn-Rhein-Sieg an hauterkennenderoptischer Sensorik geforscht. Eine optische Hauterkennung hat den Vorteil gegenuber beste-henden Sicherheitssystemen (wie z. B. Lichtschranken), dass nicht nur eine Verletzung desSicherheitsbereiches festgestellt, sondern auch eine Gefahr fur den Anwender erkannt wird, umentsprechende Sicherheitsfunktionen auszufuhren. Dies ermoglicht neue Arten von Schutzein-richtungen, deren Einsatz in vielen unterschiedlichen sicherheitskritischen Anwendungsbereichendenkbar ist. Aktuelle Forschungen im Bereich der Industrie 4.0 beschaftigen sich beispielsweisemit kollaborierenden Robotern1. Diese sollen physisch mit Menschen in einem gemeinsamenArbeitsbereich interagieren. Mit einer durch die Hauterkennung gestutzten Personenerkennungkonnte die menschliche Interaktion mit einem Roboter deutlich effizienter und sicherer gestaltetwerden.
Die verschiedenen Sensoriken des ISF verwenden fur die Material- bzw. Hauterkennung so-genannte spektrale Signaturen, welche aus mehreren Remissionsinformationen schmaler Wel-lenlangenbander im nahen Infrarot gebildet werden. In den bisherigen Entwicklungen wurdendiese Remissionsinformationen sequentiell fur jede verwendete Wellenlange erhoben. Dies hatzur Folge, dass die Messergebnisse recht storanfallig fur Umgebungseinflusse sind (z. B. star-kes Umgebungslicht oder andere Sensoren der gleichen Art). Daher wurden Konzepte zurVerbesserung unter Nutzung eines Lock-In-Verstarkers vorgeschlagen und umgesetzt. Somitist der Ausgangspunkt dieser Arbeit eine Projektarbeit, in der eine frequenzbasierte Signal-verarbeitungskette erstmalig im Kontext der optischen Hauterkennung eingesetzt worden ist.
[Sch16]
1engl.: collaborative robot, kurz: cobot
1
1 Einleitung
1.2 Problemstellung & Ziele
In der Sicherheitstechnik muss jede Schutzfunktion einen Kompromiss zwischen einer hin-reichenden Zuverlassigkeit und einer akzeptablen Verfugbarkeit eingehen. Bei Eintritt einergefahrbringenden Situation oder Storung, kann das System bei den Anwendungen einer Hauter-kennung i. d. R. in einen sicheren Zustand ubergehen (z. B. durch Ausschalten der abzusicherndenMaschine). Dies ist jedoch nur moglich, sofern diese Beeintrachtigung der Sicherheit erkanntwird. Wahrend in diesem Zustand Unfalle verhindert werden, ist ein weiterer Betrieb erst nachBeseitigung der Ursache moglich und die Verfugbarkeit nimmt zugunsten der Sicherheit ab.
Im Rahmen dieser Arbeit sollen die Moglichkeiten untersucht werden, die durch den Einsatz desMessprinzips auf Basis eines Lock-In-Verstarkers entstehen. Bei diesem werden die verschiedenenWellenlangen des multispektralen Sensorsystems moduliert angesteuert, um anschließend dieRemissionsinformationen aus dem Frequenzbereich des Messsignals zu extrahieren. Die dafureingesetzte digitale Signalverarbeitung ermoglicht eine Frequenzanalyse des Messsignals undsollte das Sensorsystem in die Lage versetzen, ungunstige Messbedingungen, welche die Funktiondes Sensors beeintrachtigen, selbststandig festzustellen. Dies konnte z. B. ein externes optischesStorsignal eines vergleichbaren Sensorsystems sein, das die gleichen Modulationsfrequenzenverwendet und dadurch eine zuverlassige Hauterkennung verhindert. Es soll untersucht werden,inwiefern diese Beeintrachtigungen erkannt und die Schutzfunktion des Sensorsystems adaptivdurch Konfigurationsanderungen aufrecht erhalten werden kann. Ein wesentlicher Aspekt dieserArbeit ist somit die Erkennung und die Beherrschung von ungunstigen Messbedingungen.
Weiterhin soll die Signalverarbeitungskette unter Nutzung von bewahrten Techniken aus derdigitalen Signalverarbeitung weiterentwickelt werden. Das Ziel ist eine fur gegebene Randbedin-gungen optimale Konfiguration zu finden, um die Leistung des Sensorsystems zu verbessern.Da diese Arbeit Optimierungen eines realen Sensorsystems behandelt, soll die Evaluation derentwickelten Verfahren, sofern moglich, mit realen Messdaten durchgefuhrt werden.
1.3 Abgrenzung
In dieser Arbeit wird keine eigene Hardware entwickelt. Als Sensor kommt ein (kommerzieller)Hautsensor der Firma Tippkemper-Matrix zum Einsatz, welcher eine Weiterentwicklung der imISF entwickelten Punktsensoren darstellt. Damit die Ergebnisse ubertragbar bleiben, wird dieHardware nur analysiert und nicht modifiziert. Die Software (Firmware und Anwendungssoftware)hingegen wird neu konzipiert und entwickelt, um die gewunschten Funktionalitaten zu erhalten.
Das dem Sensor zugrunde liegende Konzept der Hauterkennung im nahen Infrarot wird nichtverandert. Somit stellt die optische Hauterkennung in dieser Arbeit nur eine mogliche Anwendungeines multispektralen Sensorsystems dar.
2

2 Stand der Forschung
In diesem Kapitel werden einige verwandte Forschungsarbeiten bzw. -bereiche vorgestellt. Diehier betrachteten hauterkennenden Systeme beruhen dabei alle auf den besonderen Remissions-eigenschaften von Haut im NIR-Spektrum, die im Kapitel 3.1.1 naher erlautert werden.
2.1 Externe Forschung
2.1.1 Optische Hauterkennung
Bereits im Jahre 1985 wurde in einem Patent von Hacskaylo [Hac85] ein Sensor zur Hauterken-nung beschrieben. Dieser verwendet eine breitbandige Lichtquelle und insgesamt drei Detektorenmit verschiedenen Bandpassen, deren Durchlassbander bei 1,22 µm, 1,50 µm und 1,72 µm lie-gen. Die so erzeugten Remissionsintensitaten bei den drei Wellenlangen werden miteinanderverglichen, um die spektrale Signatur von Haut zu erkennen.
Im Jahre 1999 wurde von Pavlidis et al. [Pav+99] ein bildgebendes Verfahren zur Hauterken-nung veroffentlicht, welches zwei Kameras mit verschiedenen Bandpassen (1,1 µm-1,4 µm und1,4 µm-1,7 µm) verwendet. Entwickelt wurde das System zur automatischen Erkennung undZahlung von Fahrzeuginsassen, um eine Kontrolle der Nutzung von Fahrstreifen, die speziell furFahrgemeinschaften reserviert sind, zu ermoglichen. Die beiden Kameras erzeugen Bilder vonderselben Szene und die binare Hautinformation wird durch eine gewichtete Differenz beiderBilder mit anschließendem Schwellwert gebildet. Da das System grundsatzlich bei kunstlicherwie bei naturlicher Beleuchtung funktionieren soll, muss die Gewichtung an die spektraleStrahlungsverteilung der Beleuchtung angepasst werden. Ein Patent fur dieses Verfahren wurdeim Jahre 2002 [Pav+02] erteilt.
Einige Jahre spater wurde in einem weiterem Patent ein sehr ahnliches Verfahren von Determanund Wunderlin [Det+07] veroffentlicht. Dort werden zwei relativ breitbandige Wellenlangen-bereiche (0,8 µm-1,4 µm und 1,4 µm-2,2 µm) verwendet, wobei der erste von Haut reflektiertund der zweite absorbiert wird. In dem Patent werden zwei Implementationen beschrieben,die beide Bandpassfilter fur die bereits erwahnten Wellenlangenbereiche beinhalten. Die Be-leuchtungsquellen und Detektoren sind beide breitbandig und somit konnten die Bandpassfilterentweder an zwei Beleuchtungsquellen oder an zwei Detektoren angebracht werden, um so dieRemissionsinformationen der beiden Bander zu erhalten.
Hyperspektrale1 Kamerasysteme werden fur Aufklarungszwecke in Flugzeugen und Satelliteneingesetzt. Eine Anwendung hierfur ist das Auffinden von kleinen Zielen (z. B. Personen)in Luftrettungsmissionen. Am U.S. Air Force Institute of Technology untersuchten Nunez
1nach DIN 18716 das”Ergebnis der gleichzeitigen Aufnahme des gleichen Gelandes in einer Vielzahl schmal-
bandiger Spektralbereiche“
3

2 Stand der Forschung
und Mendenhall [Nun+08] [Nun09] den Einsatz solcher Kamerasysteme zur Hauterkennungund beschrieben ebenfalls ein Reflektionsmodell von menschlicher Haut. Die verwendetenHyperspektralbilder enthielten 81 spektrale Bander im Bereich von 900 nm bis 1744 nm. ZurHauterkennung verwendeten die Autoren die normierte Differenz zweier Wellenlangen (1100 nmund 1400 nm), die an den normierten differenzierten Vegetationsindex2 (NDVI) angelehnt ist.
Alle beschriebenen Verfahren haben gemeinsam, dass die Distanz zum Messobjekt keinebesondere Berucksichtigung erfahrt. Ebenfalls sind die Messergebnisse sehr stark von Umge-bungseinflussen abhangig, weshalb diese Systeme relativ einfach in ihrer Funktion beeintrachtigtwerden konnten (z. B. durch andere Systeme der gleichen Art).
2.1.2 Optische Sensorik mit Lock-In-Verstarker
Lock-In-Verstarker sind in der Lage, sehr schwache Signale in einem stark verrauschten Umfeldzu messen, daher sind sie gut geeignet fur den Einsatz in der optischen Sensorik. In modernenAnwendungen wird ein Lock-In-Verstarker aus Kostengrunden oftmals digital implementiert.Details zu den Funktionsprinzipien und Implementationsmoglichkeiten finden sich in Kapitel3.3. Es gibt eine Vielzahl von Anwendungs- und Forschungsbereichen, von denen in diesemAbschnitt einige ausgewahlte vorgestellt werden.
Hintenaus und Trinker [Hin+13] untersuchten den Einsatz von mehreren rechteckformigenReferenzsignalen und beschrieben ein mathematisches Verfahren fur die Auswahl der Modula-tionsfrequenzen, um eine Uberlagerung der Tragersignale durch Harmonische zu vermeiden.Ebenfalls stellten sie einen vereinfachten Lock-In-Algorithmus vor, welcher sich fur eine direkteHardware-Implementation in Logik eignet. Die entwickelten Verfahren wurden von den Autorenauf einen multispektralen Feuchtigkeitssensor fur die Papierproduktion ubertragen, der alsStrahlungsquellen LEDs mit Peakwellenlangen bei 1,3 µm, 1,45 µm und 1,65 µm verwendet.
Die optische Tomographie ist ein bildgebendes Verfahren aus der Medizintechnik, welchesGewebestrukturen im Korper mithilfe von elektromagnetischer Strahlung im sichtbaren odernahen infraroten Bereich abbildet. Sie hat den großen Vorteil i. d. R. nicht-invasiv zu sein undkann daher in vivo3 bzw. in situ4 durchgefuhrt werden. Aufgrund der relativ starken Absorptionder elektromagnetischer Strahlung durch das Gewebe, kommen sehr oft Lock-In-Verstarker indiesen Verfahren zum Einsatz. Allgemein gibt es zwei verschiedene Methoden, welche anhandder Eindringtiefe unterschieden werden. Die diffuse optische Tomographie hat die Untersuchungvon Gewebe durch dickere Schichten zum Ziel und wird z. B. beim Brustkrebs-Screening[Pog+97] oder bei Untersuchungen von Gehirn-Funktionen [Cha+98] eingesetzt. Die optischeKoharenztomographie5 (OCT) dagegen wird genutzt, um sehr dunne und oberflachennaheGewebeschichten mit einer hoher Auflosung darzustellen. Medizinische OCT-Anwendungenliegen z. B. in der Ophthalmologie6 oder in der Dermatologie7 (z. B. Hautkrebsuntersuchungen)[Fer+03]. Neben der Anwendung in medizinischen wird die OCT auch in biometrischen Bereicheneingesetzt. Klassische Fingerabdruckscanner uberprufen nur die zweidimensionale Oberflache
2engl.: normalized differenced vegetation index3lat. fur
”im Lebendigen“
4lat. fur”am Ort“
5engl.: optical coherence tomography6Duden: Lehre von den Erkrankungen des Auges und ihrer Behandlung; Augenheilkunde7Duden: wissenschaftliche Erforschung der Hautkrankheiten
4

2 Stand der Forschung
eines Fingers, welche sich relativ leicht falschen lasst. Mithilfe der OCT kann ein hochauflosendesdreidimensionales Bild des Gewebes erzeugt und zur falschungssicheren Identifikation verwendetwerden [Cha+08].
Die als Vorbereitung zu dieser Arbeit durchgefuhrte Literaturrecherche ergab keinen Hinweisauf Arbeiten, welche den Einsatz eines Lock-In-Verstarkers in der Hauterkennung oder alsadaptive Sicherheitssensorik thematisieren.
2.2 Forschung an der Hochschule Bonn-Rhein-Sieg
An der Hochschule Bonn-Rhein-Sieg wird seit uber zehn Jahren an hauterkennender optischerSensorik geforscht, daher wurden bereits zahlreiche Forschungsarbeiten in diesem Gebietdurchgefuhrt und veroffentlicht. Diese Arbeiten wurden von derselben Arbeitsgruppe in denvergangenen Jahren im ISF fortgefuhrt. Eine Besonderheit der am ISF entwickelten Sensorik istdie Verwendung von handelsublichen LEDs zur schmalbandigen Beleuchtung des Messobjektes,die den Einsatz in Anwendungsgebieten mit hoher Kostensensibilitat ermoglicht. Es existierenmehrere Patente und Patentanmeldungen des ISF zur Hauterkennung, sowohl im Bereichder funktionalen Sicherheit [Jun+10] als auch in der Biometrie [Sch+08]. Im Wesentlichenlassen sich die verschiedenen Systeme in zwei Kategorien unterteilen: Punktsensoriken undKamerasysteme. Eine Punktsensorik uberwacht einen oder mehrere Messpunkte und kann z. B.zur Absicherung von gefahrlichen Stellen einer Maschine eingesetzt werden. Die Hauterkennungkann hierbei sehr schnell erfolgen, sodass es im Gefahrenfall moglich ist, innerhalb von wenigenMillisekunden eine nachfolgende Sicherheitsfunktion auszufuhren. Kamerasysteme hingegenkonnen ganze Bereiche uberwachen und sind daher vielseitiger einsetzbar (z. B. bei großraumigenGefahrenbereichen). Aufgrund der aufwendigeren Technik und den großeren Datenmengenist jedoch die Verarbeitungsgeschwindigkeit und damit die pixelweise Hauterkennung fur eingesamtes Bild deutlich langsamer im Vergleich zu den Punktsensoren. Im Folgenden werdeneinige ausgewahlte Forschungsarbeiten des ISF naher beschrieben.
Gemeinsam mit dem Institut fur Arbeitsschutz der Deutschen Gesetzlichen Unfallversiche-rungen wurde ein Starttaster mit Hauterkennung entwickelt, welcher die Einhaltung vonUnfallverhutungsvorschriften zum Tragen von Handschuhen unterstutzen kann. Gerade beiStanderbohrmaschinen, an welchen vorschriftsmaßig das Tragen von Handschuhen nicht erlaubtist, geschehen aufgrund Missachtung schwere Unfalle, die bleibende Schaden verursachenkonnen. [Sch+10]
Ein anderer Anwendungsfall ist der Einsatz in einer Lichtschranke, um nicht nur eine Verletzungdes Schutzbereiches festzustellen, sondern auch eine Klassifizierung des Oberflachenmaterialsdurchzufuhren. Somit kann z. B. die Hand des Anwenders von einem zugefuhrten Werkstuckunterschieden werden. Das Zufuhren und Entnehmen von Werkstucken aus dem Arbeitsbereichohne Auslosen einer Sicherheitsfunktion erlaubt einen deutlichen flexibleren Maschinenumgangund erhoht die Verfugbarkeit. [Ste+12]
Schutzhauben an Kreissagen konnen schwere Verletzungen durch Kontakt mit dem Sageblattoder durch Materialruckschlag verhindern und die Feinstaubbelastung fur den Anwenderreduzieren. Da die manuelle Bedienung jedoch in der Praxis storend ist, wird sie oftmalsauf eine hohe Position fixiert und verliert so samtliche Schutzwirkung. Ein Sensor, welcherneben einer Distanzmessung zum Werkstuck eine Hauterkennung durchfuhrt, ermoglicht eine
5

2 Stand der Forschung
materialabhangige und automatische Hoheneinstellung der Schutzhaube. Dies wurde denKomfort erhohen und zusatzlich das Berufsrisiko des Anwenders reduzieren. [Jun+15]
Die erwahnten drei Anwendungsbeispiele beruhen auf Punktsensoren, die von Schwaneberget al. [Sch+12] [Sch13] am ISF entwickelt wurden. Anhand einer ausfuhrlichen Studie mit330 Versuchspersonen wurde die Auswahl der verwendeten Wellenlangen durchgefuhrt, mitdem Ziel, Haut von typischen Werkstucken zu unterscheiden. Insgesamt wurden fur dieseAnwendung vier Wellenlangen bei 830 nm, 1060 nm, 1300 nm und 1550 nm ausgewahlt, welchedie Absorptionsbande der Luft bei etwa 1340 nm bis 1450 nm vermeiden. Eine weitere Beson-derheit der Punktsensorik ist eine intrinsische Distanzmessung zum Messobjekt. Durch eineStrahlformung wird ein multispektraler LED-Spot der erwahnten Wellenlangen erzeugt unddie Remission wird uber ein Zeilenarray von Photodioden gemessen, was eine Distanzmessunguber das Triangulationsprinzip ermoglicht.
In anderen Projekten wurde das Konzept der Hauterkennung auf bildgebende Verfahrenubertragen, indem der Empfanger durch eine digitale NIR-Kamera ersetzt wurde. Steiner[Ste16] untersuchte hierbei die Anwendung bei biometrischer Gesichtserkennung, wie sie z. B.bei automatisierten Grenz- und Zugangskontrollen zum Einsatz kommt. In aktuellen Systemenstellen Tauschungsversuche mit Verkleidungen und Masken ein großes Problem dar. Durcheine Erweiterung solcher Systeme um eine Hauterkennung kann die Echtheit von Gesichternsichergestellt und ein Tauschungsangriff effektiv abgewehrt werden.
Alle bisher im ISF entwickelten Sensorsysteme zur Hauterkennung, sowohl die Punktsensorenals auch die Kamerasysteme, verwenden das gleiche Messprinzip, bei dem sequentiell dieRemissionsinformationen fur jede verwendete Wellenlange ermittelt wird. Der in dieser Arbeiteingesetzte Punktsensor hingegen verwendet erstmalig in einer im ISF eingesetzten Sensorikein neues Messprinzip auf Basis eines Lock-In-Verstarkers. Die genauen Unterschiede zwischenden beiden Messprinzipien werden in Kapitel 3.1.3 naher erlautert.
6

3 Grundlagen
3.1 Hauterkennung mittels optischer Sensorik
In diesem Kapitel werden verschiedene Aspekte der optischen Hauterkennung betrachtet. Dereinleitenden Beschreibung der besonderen Remissionseigenschaften von Haut im nahen Infrarot,welche die Grundlagen der optischen Hauterkennung darstellen, folgt eine Erlauterung derFunktionsprinzipien der verwendeten optoelektronischen Komponenten, die in dem Sensorsystemzum Einsatz kommen. Abschließend findet eine Betrachtung einiger Realisierungsmoglichkeitenund Messprinzipien eines multispektralen Sensors statt.
3.1.1 Physikalische Grundlagen
Die spektralen Remissionseigenschaften von Haut im nahen Infrarot1 (NIR) sind seit langembekannt. Untersuchungen dieser besonderen Eigenschaften gehen bereits in die funfziger Jahredes zwanzigsten Jahrhunderts zuruck. Jacquez et al. [Jac+55] zeigten, dass die spektraleRemission oberhalb von 1,2 µm weitgehend unabhangig vom Hauttyp bzw. Melaningehalt istund vor allem durch den hohen Wassergehalt bestimmt wird. Diese Eigenschaften wurden inneueren Untersuchungen bestatigt [Tro+01][Meg+02]. Mithilfe von Spektroskopie lasst sichdieser Sachverhalt veranschaulichen. Abbildung 3.1 zeigt dazu die spektralen Remissionskurvender sechs verschiedenen Hauttypen nach Fitzpatrick [Fit88] (vom hellen keltischen Typ I biszum schwarzen Typ VI). Wahrend die Kurven im sichtbaren Bereich erwartungsgemaß weitauseinanderliegen, so gleichen sie sich ab etwa 900 nm an und beschreiben ein einheitlichesMuster. Zusatzlich zu den verschiedenen Hauttypen sind weitere exemplarische Materialiendargestellt, welche sich im NIR-Bereich von Haut deutlich unterscheiden und somit davondifferenziert werden konnen.
Der Einsatz eines Spektrometers zur Materialerkennung hat jedoch verschiedene Nachteile.Die Anschaffungskosten sind sehr hoch und die Instrumente sind aufgrund ihres Aufbaus oftnicht fur den mobilen Einsatz geeignet. Zusatzlich dauert der Messvorgang fur eine Anwendungim Sicherheitsbereich zu lange (� 1 ms) und eine Messung mit offenem Aufbau ist wegendes vorhandenen Umgebungslichts problematisch. Daher werden fur die Materialerkennungsogenannte spektrale Signaturen verwendet. Diese bestehen aus mehreren Remissionsmesswertenschmaler Wellenlangenbander, welche fur einen spezifischen Anwendungsfall ermittelt werdenmussen. Somit wird die Erkennung auf die Nutzung einiger Stutzstellen im Remissionsspektrumreduziert, wodurch nicht mehr die komplette Bandbreite eines Spektrometers benotigt wird. Furdie Hauterkennung wurden bisher mehrere Wellenlangen (mindestens zwei) zwischen 850 nm und1550 nm verwendet, wobei insbesondere die Remission (bzw. starke Absorption) von 1550 nmim Vergleich zu den anderen Wellenlangen fur die Erkennung von Haut ausschlaggebend ist.
1DIN 5031-7: NIR ist zwischen 780 nm und 3000 nm
7

3 Grundlagen
Sichtbares Spektrum
Nahinfrarot-Spektrum
400 460 520 580 640 700 760 820 880 940 1000430 490 550 610 670 730 790 850 910 970 1030
10601090
11201150
11801210
12401270
13001330
13601390
14201450
14801510
15401570
1600
0
10
20
30
40
50
60
70
80
90
100
Hauttyp 1Hauttyp 2Hauttyp 3Hauttyp 4Hauttyp 5Hauttyp 6LederBaumwollstoffHolz trockenHolz nass (1)Holz nass (2)Fleisch (Schwein)
Wellenlänge [nm]
Rem
issi
onsi
nten
sitä
t [%
]
Abbildung 3.1: Remissionsspektren verschiedener exemplarischer Materialien [Sch13]
Zur weiteren Veranschaulichung konnen diese Wellenlangen aus dem NIR-Bereich auf den furMenschen sichtbaren Spektralbereich abgebildet werden. Die daraus resultierenden Farbenentsprechen nicht der Realitat, aus diesem Grund werden Bilder mit einer solchen Abbildung auchFalschfarbenbilder genannt. Abbildung 3.2 zeigt die verschiedenen Hauttypen nach Fitzpatrickin einem solchen Falschfarbenbild. Hierbei werden 1050 nm auf den Rot-, 1300 nm auf denGrun- und 1550 nm auf den Blau-Kanal abgebildet. In dem Falschfarbenbild ist deutlich zuerkennen, dass die Haut unabhangig vom konkreten Hauttyp im NIR-Bereich gleich erscheint.
1 2 3 4 5 6
Abbildung 3.2: Falschfarbenbild der verschiedenen Hauttypen nach Fitzpatrick [Ste16]
3.1.2 Optoelektronik
Elektromagnetische Strahlung kann als Welle und als Teilchen (Lichtquant oder Photon)beschrieben werden, was als Welle-Teilchen-Dualismus bekannt ist. Eine Beschreibung alselektromagnetische Welle durch die Wellenoptik ermoglicht eine Erklarung physikalischer
8

3 Grundlagen
Phanomene der Interferenz, Beugung und Polarisation. Sind die Abmessungen der optischenBauelemente (wie z. B. Linsen) groß im Vergleich zu der Wellenlange des Lichts, so kann dieAusbreitung des Lichtes mit den Gesetzen der geometrischen Optik beschrieben werden. EineBeschreibung als Strom von Photonen hingegen ermoglicht eine Erklarung der energetischenWechselwirkung von elektromagnetischer Strahlung und Materie. [Her+06, S.1]
Anfang des 20. Jahrhunderts formulierte Albert Einstein seine Lichtquantenhypothese, in derLicht als Strom von Lichtquanten oder Photonen beschrieben wird. Jedes Photon transportierteine diskrete Menge Energie und kann diese bei Wechselwirkung mit Materie an diese abgeben.Die Energie eines Photons betragt
Eph = hf =hc0λ
(3.1)
h ist die Planck-Konstante, f die Frequenz, λ die Wellenlange des Lichts und c0 die Vakuum-Lichtgeschwindigkeit. Werden Photonen von Materie absorbiert, so gibt jedes Photon seineEnergie an das absorbierende System ab und regt es in einen hoheren Energiezustand an. Diesfuhrt z. B. dazu, dass Elektronen in hohere Energiezustande angehoben und aus einer Bindunggelost werden konnen, was als photoelektrischer Effekt bekannt ist. Umgekehrt werden Photonenemittiert, wenn Elektronen von einem hoheren (E2) in einen niedrigeren Energiezustand (E1)ubergehen. Sind diese Energiezustande scharf definiert, dann entstehen Photonen mit derEnergie Eph = E2 − E1. [Her+06, S.1,61f][Ein05]
In den folgenden Abschnitten werden die Funktionsweise und die Eigenschaften von ausgewahltenoptoelektronischen Komponenten, die in dem Sensorsystem zum Einsatz kommen, kurz erlautert.
Emitter (Leuchtdiode)
Mit dem Bandermodell lassen sich die erlaubten Energieniveaus von Elektronen in Einkristallenbeschreiben. Wahrend in einzelnen Atomen die Energieniveaus diskret sind, so verschmelzendiese in einem Kristall zu Bandern, da die verschiedenen Atome miteinander in Wechselwirkungstehen2. In Halbleitern sind die erlaubten Energieniveaus der Elektronen innerhalb dieser Banderkontinuierlich verteilt. Bei einer Temperatur nahe des absoluten Nullpunktes fullen Elektronenalle tief liegenden Energieniveaus bis zur oberen Kante des Valenzbandes (EV ) aus. Getrenntdurch eine verbotene Zone oder Bandlucke3 der Breite Eg schließt sich die untere Kante desLeitungsbandes (EL) an. Durch Energiezufuhr (z. B. thermisch oder optisch) werden Elektronenuber die Bandlucke vom Valenzband ins Leitungsband gehoben, wodurch im Valenzband einLoch (Defektelektron) entsteht. Bei dieser Generation eines freien Elektron-Loch-Paares wird einElektron aus seiner Bindung gerissen und kann sich frei im Halbleiterkristall bewegen. Das freigewordene Loch kann sich uber Platzwechselvorgange ebenfalls bewegen, daher tragen Locherwie Elektronen zum elektrischen Strom bei. Die Rekombination eines Elektrons im Leitungsbandmit einem Loch im Valenzband restauriert eine defekte Bindung und die durch den Ubergang freiwerdende Energie kann entweder als Photon abgegeben oder in Warme (Gitterschwingungen)
2weitere Details zum Bandermodell siehe z. B. [Her+12, S.809ff]3engl. bandgap
9

3 Grundlagen
umgesetzt werden. Bei einer strahlenden Rekombination entstehen Photonen, deren Energieetwa der Bandlucke des Halbleiters entspricht:
Eph ≈ EL − EV = Eg (3.2)
Die Wellenlange der erzeugten Photonen hangt somit direkt von der Breite der Bandlucke desverwendeten Halbleiters ab [Her+06, S.70f]
Nicht alle Halbleitermaterialien eignen sich fur elektromagnetische Strahlungsquellen, da inmanchen die Rekombination vorwiegend nicht strahlend ablauft (z. B. Silizium oder Germanium).Fur eine strahlende Rekombination werden sogenannte direkte Halbleiter benotigt, bei denenes keinen Impuls-Unterschied zwischen den Bandminima im Leitungsband und Bandmaxima imValenzband gibt. Wie effizient ein Halbleitermaterial bei der Erzeugung elektromagnetischerStrahlung ist, kann durch den internen Quantenwirkungsgrad beschrieben werden, welcher angibt,wie viele der Rekombinationsvorgange strahlend ablaufen. Jedoch konnen nicht alle im Halbleitererzeugten Photonen den Kristall verlassen, weil durch Reflexion an den Grenzflachen diemeisten Photonen zuruckgehalten werden. Daher wird durch den externen Quantenwirkungsgradbeschrieben, wie viele der Rekombinationsvorgange zu einem im Außenraum nachweisbarenPhoton fuhren. [Her+06, S.71f]
Eine Leuchtdiode (LED) beinhaltet im Wesentlichen einen pn-Ubergang aus einem Halbleiter-material mit hohem internen Quantenwirkungsgrad. Beim Anlegen einer hinreichend hohenSpannung in Flussrichtung wird die Sperrschicht abgebaut, sodass ein Strom fließen kann. Dabeidiffundieren Elektronen in den p-dotierten und Locher in den n-dotierten Bereich, wo sie sofortmit den dort vorhandenen Majoritatsladungstragern rekombinieren und Lumineszenzstrahlungaussenden. [Her+06, S.73]
Die Spektren von LEDs sind relativ breit, da die Elektronen und Locher aus einem Energiebereichund keinen festen Energieniveaus stammen. Abbildung 3.3 zeigt ein typisches LED-Spektrummit wichtigen Kenngroßen, wie der Peakwellenlange λp und der Halbwertsbreite4 (FWHM)∆λ0,5. Eine LED erzeugt somit keine monochromatische elektromagnetische Strahlung. Sie sindaber fur den Einsatz im Hauterkennungssensor hinreichend schmalbandig, da die verschiedenengenutzten Wellenlangenbander des Sensors genugend Abstand zueinander haben.
1.0
0.75
0.5
0.25
0
Wavelength λ (nm)
Inte
nsit
y (
%)
λp
Δλ0.5
Abbildung 3.3: Typische Spektralverteilung einer LED ohne Nachfilterung
4engl.: full width at half maximum
10

3 Grundlagen
Detektor (Photodiode)
Elektromagnetische Strahlung wird dann in einem Halbleiter absorbiert, wenn die Energieder Photonen ausreicht, Elektronen aus ihren Bindungen zu losen und vom Valenzband insLeitungsband zu heben. Absorbierte Photonen erzeugen somit Elektron-Loch-Paare und dieVoraussetzung fur eine Absorption ist, dass die Photonenenergie Eph großer als die Energie derBandlucke Eg ist:
Eph ≥ Eg = EL − EV (3.3)
Umgekehrt muss die Wellenlange der elektromagnetischen Strahlung kleiner sein als eineGrenzwellenlange λc:
λ ≤ λc =hc0Eg
(3.4)
[Her+06, S.91f]
Eine Photodiode ist ein aktives Bauelement, welches bei Bestrahlung einen elektrischen Stromerzeugt und im Wesentlichen aus einem pn-Ubergang besteht. Wenn ein Photon mit ausrei-chender Energie in der Raumladungszone ein Elektron-Loch-Paar erzeugt, so findet aufgrunddes elektrischen Feldes eine Ladungstrennung statt, wodurch das Elektron in den n-dotiertenund das Loch in den p-dotierten Bereich befordert wird. Somit fließt im Außenkreis der Diodepro getrenntem Elektron-Loch-Paar genau eine Elementarladung, welche einem elektrischenStrom in Sperrrichtung entspricht. [Her+06, S.93f]
Die spektrale Empfindlichkeit beschreibt die Fahigkeit einer Photodiode einfallende elektroma-gnetische Strahlung in elektrischen Strom umzuwandeln und wird in der Einheit Ampere proWatt gemessen. Sie wird von der wellenlangenabhangigen Quantenausbeute5 des verwendetenHalbleitermaterials bestimmt, welche das Verhaltnis der eindringenden Photonen zu erzeugtenElektron-Loch-Paaren ist. Abbildung 3.4 zeigt die spektralen Empfindlichkeiten verschiedenerbekannter Halbleitermaterialien. Silizium wird sehr oft in Detektoren eingesetzt, die fur denmenschlich sichtbaren Spektralbereich6 ausgelegt sind. Es ist jedoch ungeeignet fur die Detek-tion von NIR-Strahlung, da es eine Grenzwellenlange von etwa λc ≈ 1,1 µm aufweist. InGaAshingegen deckt den benotigten Bereich von etwa 1,0 µm bis 1,6 µm vollstandig ab und ist somiteine gute Wahl fur den Einsatz in der hauterkennenden Sensorik.
Der Strom einer Photodiode enthalt immer Rauschkomponenten, deren Einfluss eine weiterewichtige Charakteristik darstellt. Die wichtigsten Rauschkomponenten, die bei Photodiodenauftreten, sind das Schrotrauschen7 und das thermische Rauschen8. Schrotrauschen entstehtimmer dann, wenn elektrischer Strom eine Potentialbarriere uberwinden muss, da die Ladungs-trager die Sperrschicht im pn-Ubergang statistisch regellos uberqueren (
”wie die Schrotkugeln
einer Schrotflinte“). Beitrage zum Strom liefern der Photostrom (durch auftreffende Photonenerzeugt), der Hintergrundstrom (verursacht durch Hintergrundstrahlung) sowie der Dunkel-strom der Diode. Thermisches Rauschen hingegen ist direkt von der Temperatur abhangig,da es durch die thermische Bewegung der Ladungstrager erzeugt wird. Beide an dieser Stelleerlauterten Rauschkomponenten sind weißes Rauschen, weil sie ein frequenzunabhangigesLeistungsdichtespektrum aufweisen. [Her+06, S.97ff]
5engl.: quantum efficiency6DIN 5031-7: Sichtbares Licht ist zwischen 380 nm und 780 nm7auch Schottky-Rauschen8auch Johnson-Nyquist-Rauschen
11

3 Grundlagen
1.25
1.0
0.75
0.5
0.25
0400 600 800 1000 1200 1400 1600 1800
Resp
on
siv
ity (
A/W
)
Wavelength λ (nm)
Quantum efficie
ncy =
100%InGaAs
Ge
Si
Abbildung 3.4: Spektrale Empfindlichkeit verschiedener Halbleitermaterialien nach [Her+06, S. 94]
3.1.3 Sensorkonzepte
In Kapitel 2 wurden bereits verschiedene optische Systeme vorgestellt, die Remissionsinforma-tionen von mehr oder weniger schmalen Wellenlangenbandern erzeugen. Die Detektoren sind inder Regel breitbandig, aus diesem Grund mussen zusatzliche Maßnahmen getroffen werden, umdie gewunschten Informationen zu gewinnen. Im Folgenden wird dabei zwischen passiven undaktiven Systemen unterschieden.
Passive Systeme nutzen das Umgebungslicht in ihrer Betriebsumgebung und sind daher auf einepassende Beleuchtung angewiesen, welche die gewunschte elektromagnetische Strahlung emit-tiert (z. B. Sonnenlicht oder Halogenlampen fur NIR-Strahlung). Fur einzelne Nutzwellenlangenkonnen schmalbandige optische Bandpassfilter vor mehreren Detektoren angebracht werden.Hyperspektralkameras oder Spektrometer verwenden dagegen Beugungsgitter oder Prismen,welche die einfallende Strahlung in ihre chromatischen Anteile zerlegen, um anschließenddie schmalbandigen Wellenlangenbander mit einem Array von Detektoren zu messen. AktiveSysteme haben eine eigene passende Beleuchtung, wodurch sie weitestgehend unabhangig vomUmgebungslicht sind. Wenn die Strahlungsquellen ebenfalls breitbandig sind, dann konntenBandpassfilter entweder an mehreren Emittern oder Detektoren angebracht werden.
Die bisherigen Entwicklungen des ISF verwenden eine aktive schmalbandige Beleuchtungmit NIR-LEDs und ungefilterten breitbandigen Detektoren. Mit dieser Konstellation ist esmoglich, auf handelsubliche Komponenten zuruckzugreifen und auf kostenintensive optischeFilter zu verzichten, wodurch ein Einsatz in Anwendungsgebieten mit hoher Kostensensibilitatmoglich wird. Da jedoch einzelne Detektoren eingesetzt werden, muss die Ermittlung derRemissionsinformationen uber spezielle Messprinzipien stattfinden, welche im Wesentlichen ausbekannten Multiplexverfahren bestehen.
12

3 Grundlagen
Messprinzipien
Alle bisherigen Entwicklungen des ISF verwenden eine sequentielle Messung, die einem Zeit-multiplexverfahren entspricht. Hierbei werden in einem Messzyklus alle LEDs nacheinanderangeschaltet, um die Remissionen fur einzelne Wellenlangen zu messen. Zusatzlich wird eineDunkelmessung mit ausgeschalteten LEDs vorgenommen, welche als Umgebungslichtoffsetvon den anderen Messungen abgezogen wird. Das resultierende Detektorsignal ist somit keineeinfache periodische Schwingung und kann deshalb nicht ohne großen Aufwand gefiltert werden.Es hat sich herausgestellt, dass dieses Messprinzip verschiedene Nachteile mit sich bringt. Zumeinen kann die Funktion der Sensorik durch vergleichbare Systeme beeintrachtigt werden, sodasszwei (unsynchronisierte) Sensoren, welche dieses Messprinzip verwenden, nicht an dem selbenOrt eingesetzt werden konnen. Zum anderen entsteht eine zusatzliche Bewegungsunscharfe, dadie Remissionsinformationen nacheinander ermittelt werden, was bei schnellen Bewegungeninsbesondere in den bildgebenden Verfahren zu einer verschobenen Abbildung der verschiedenenWellenlangen auf die Bildpunkte fuhrt.
In dem neuen Punktsensor werden dagegen alle LEDs simultan mit periodischen Signalen9
unterschiedlicher Frequenzen angesteuert. Dies hat den großen Vorteil, dass das Messsignalaus echten harmonischen Schwingungen besteht und somit Filtertheorien anwendbar werden.Ebenfalls entfallt die Umgebungslichtmessung, da der konstante Offset bereits durch einenanalogen Hochpass entfernt werden kann. In einem Messfenster werden die Photodiodensignalein aquidistanten Zeitabstanden abgetastet, um anschließend mit einem digitalen Filter dieRemissionsmesswerte fur die einzelnen Wellenlangen berechnen zu konnen. Da die LEDs mitunterschiedlichen Frequenzen moduliert werden, entspricht diese simultane Messung einemFrequenzmultiplexverfahren. Im optischen Bereich wird ein Wellenlangenmultiplex mit schmal-bandigen optischen Filtern ebenfalls Frequenzmultiplex genannt, da Frequenz und Wellenlangeuber die Ausbreitungsgeschwindigkeit der elektromagnetischen Strahlung miteinander gekop-pelt sind. In dieser Arbeit wird diese Definition jedoch nicht verwendet. Die wesentlichenUnterschiede der beiden Messprinzipien sind in Abbildung 3.5 zusammengefasst.
LED0
LED1
LED2
Messzyklus
AlleAus
NurLED0
Nur LED1
Nur LED2
(a) Sequentielle Messung - Zeitmultiplex
LED0
LED1
LED2
Alle LEDs gleichzeitig(mit versch. Frequenzen)
Messfenster
(b) Simultane Messung - Frequenzmultiplex
Abbildung 3.5: Vergleich der verschiedenen Messprinzipien
9hier: Rechteckschwingungen
13

3 Grundlagen
Ein weiterer Unterschied der beiden Messprinzipien ist der maximal mogliche LED-Strom ohneeine thermische Zerstorung der Komponenten zu riskieren. Da die LEDs nicht kontinuierlichangeschaltet sind, kann der Strom bei beiden Varianten großer als der maximal zulassigeDauerstrichstrom ausfallen. Bei der sequentiellen Messung gibt es langere ausgeschaltetePhasen (bei drei LED-Arten 25% Duty-Cycle) im Gegensatz zu der simultanen Messung (beiRechtecksignalen 50% Duty-Cycle), daher kann prinzipiell ein hoherer LED-Strom verwendetwerden.
Amplitudenmodulation mit Frequenzmultiplex
Das in dieser Arbeit eingesetzte Sensorsystem verwendet mit der simultanen Messung ein Fre-quenzmultiplexverfahren. Dabei uberlagern sich die mit verschiedenen Frequenzen moduliertenTragersignale außerhalb des Sensors. Die Dampfung bzw. die wellenlangenabhangige optischeAbsorption durch eine Messoberflache kann als Amplitudenmodulation der Tragersignale inter-pretiert werden. Der Receiver empfangt anschließend ein Mischsignal der amplitudenmoduliertenTragersignale, um mit einem Demodulator die Amplitude und Phase der Modulationsfrequenzenzu berechnen. Ein Lock-In-Verstarker ist eine Sonderform der synchronen Amplitudendemo-dulation und kann verwendet werden, um die Amplitude eines bekannten Wechselsignals zumessen. Wahrend bei Lock-In-Verstarkern meist Sinussignale verwendet werden, ist es moglichRechtecksignale zu benutzen, wenn die zusatzlichen Frequenzanteile durch Harmonische in derSystemauslegung berucksichtigt werden. Das komplette Sensor-Schema ist in Abbildung 3.6zusammenhangend dargestellt.
f1
f2
f3
Transmitter
ReceiverDemodulator(e.g. Lock-In-
Amplifier)
A1, ϕ1
A2, ϕ2
A3, ϕ3
Abbildung 3.6: Schema Amplitudenmodulation mit Frequenzmultiplex
3.2 Digitale Signalverarbeitung
In modernen Systemen wird die Signalverarbeitung zunehmend von der analogen in die digitaleDomane verlagert. Dies hat den Vorteil, dass einerseits Hardwarekomponenten und damitKosten eingespart werden konnen und andererseits eine Anpassung der Signalverarbeitung durcheinfaches Austauschen der Software realisiert werden kann. Dieses Paradigma wurde in dem
14

3 Grundlagen
behandelten Sensorsystem ebenfalls angewandt und somit spielt die digitale Signalverarbeitungin dieser Arbeit eine tragende Rolle.
Am Anfang jeder digitalen Signalverarbeitung steht die Digitalisierung eines analogen Signals.Dies geschieht in zwei Schritten: Abtastung und Quantisierung. Damit bei der Abtastung keineirreparablen Fehler entstehen, muss das Eingangssignal gemaß dem Abtasttheorem10 auf diehalbe Abtastrate band-begrenzt sein. Daher werden mit einen Tiefpassfilter (Anti-Aliasing-Filter) die unerwunschten Frequenzanteile, die großer oder gleich der halben Abtastrate sind,entfernt. Anschließend entnimmt das Abtast-Halte-Glied11 dem analogen Signal die Spannungund halt sie fur ein Abtastintervall konstant, der Analog-Digital-Umsetzer12 (ADC) wandeltdie zeit-diskrete Spannungsfolge anschließend in eine zeit- und wert-diskrete Zahlenfolge um.Die nun digital vorliegende Zahlenfolge kann gefiltert, abgespeichert oder verarbeitet werden.
[Tie+02, S. 1019f][Smi02, S. 35ff]
In klassischen Anwendungen, bei denen ein digitales Filter in eine analoge Umgebung eingebettetwird, muss nach der digitalen Filterung die Zahlenfolge mit einem Digital-Analog-Umsetzer13
(DAC) wieder in eine Spannung umgewandelt werden. Der DAC liefert eine zeit- und wert-diskrete Spannungsfolge, die mit einem Tiefpassfilter (Rekonstruktionsfilter) abschließendgeglattet werden muss. In dieser Arbeit wird jedoch kein DAC eingesetzt, da die Daten digitalweiterverarbeitet werden. Abbildung 3.7 zeigt schematisch das klassische Verarbeitungsschemadigitaler Filter.
Anti-Aliasing-Tiefpass
Abtast-Halte-Glied
Digitales Filter
Analog-Digital-
Umsetzer
Digital-Analog-
Umsetzer
Rekon. Tiefpass
wertdiskret
zeitdiskret
Abbildung 3.7: Klassisches Verarbeitungsschema digitaler Filter nach [Tie+02, S. 1019]
3.2.1 Abtasttheorem & Uberabtastung
Das Abtasttheorem besagt, dass ein kontinuierliches Signal richtig abgetastet werden kann,wenn es keine Frequenzkomponenten großer oder gleich der halben Abtastrate enthalt. Diehalbe Abtastrate wird auch oft als Nyquistrate bezeichnet.
2 · fmax < fs = 2 · fnyquist (3.5)
Ein digitales Signal kann keine Frequenzen oberhalb der Nyquistrate enthalten. Wenn dasursprungliche Signal Frequenzkomponenten oberhalb der Nyquistrate enthalt, so wird durchAliasing deren Frequenz auf darstellbare Frequenzen unterhalb der Nyquistrate abgebildet. Somit
10bekannt als Nyquist-Shannon-Abtasttheorem bzw. WKS-Abtasttheorem (fur Whittaker, Kotelnikow undShannon)
11engl.: sample and hold12engl.: analog-to-digital converter13engl.: digital-to-analog converter
15

3 Grundlagen
sind Aliasing-Effekte Frequenzkomponenten, die in dem analogen Signal nicht vorgekommensind. Ist Aliasing aufgetreten und eine Frequenzkomponente entsteht bei falias, konnte dieseaus einer unendlichen Menge von Frequenzen Falias entstanden sein:
Falias = {falias, i · fnyquist ± falias | i ∈ N \ {0}} (3.6)
[Smi02, S. 40ff]
Zur Vermeidung von Aliasing-Effekten wird das Signal vor der Abtastung mit einem Tiefpassgefiltert, der alle Frequenzen großer oder gleich der Nyquistrate entfernen soll. Da ein reales FilterSignalanteile nur dampfen kann, muss dieses unter Umstanden eine hohe Ordnung aufweisen,damit eine hinreichend große Dampfung erreicht wird. Alternativ kann mittels Uberabtastung14
das Signal schneller abgetastet werden als fur die Anwendung eigentlich benotigt wird. Dadurchwird die Nyquistrate deutlich uber die Grenzfrequenz des Anti-Aliasing-Filters verschoben unddas Filter kann durch ein einfacheres, gunstigeres Filter (z. B. RC-Tiefpass15) ausgetauschtwerden. Jedoch entstehen durch die hohere Abtastrate großere Datenmengen, die nicht benotigteFrequenzinformationen beinhalten. Dieses Problem ist mit der Multiraten-Signalverarbeitung,die Messdaten auf eine andere Abtastrate abbilden kann, losbar. Bei der Dezimierung werden dieDaten mit einem digitalen Tiefpass hoher Ordnung gefiltert und anschließend auf eine geringereAbtastrate abgebildet (z. B. durch einfaches Auslassen von Messpunkten). Das Resultat istidentisch mit einer starkeren Filterung im analogen Bereich und einer langsameren Abtastung.Da jedoch ein analoges Filter hoher Ordnung vergleichsweise teuer und schwer zu realisierenist, wird dieses Verfahren in vielen modernen Anwendungen angewandt. [Smi02, S. 58ff]
3.2.2 Signalqualitat, Prazision & Genauigkeit
Das Signal-Rausch-Verhaltnis16 (SNR) ist ein Maß fur die Qualitat eines Nutzsignals, was voneinem Rauschsignal uberlagert wird. Es ist definiert als das Verhaltnis der mittleren SignalleistungPsig zur mittleren Rauschleistung Pnoise. Da die Leistung eines Signals proportional zum Quadratder Spannungen ist (P ∼ U2), kann das SNR aus den Spannungen berechnet werden. DieSignalleistung ist i. d. R. um mehrere Großenordnungen großer als die Rauschleistung, weshalbdas SNR oft in einem logarithmischen Maßstab angeben wird.
SNR =Psig
Pnoise=
U2sig
U2noise
SNRdB = 10 · log(Psig
Pnoise) = 20 · log(
Usig
Unoise)
(3.7)
[Tie+02, S. 486]
Eine alternative Definition des SNR ist der Kehrwert des Variationskoeffizienten und wirdz. B. in der Bildverarbeitung und Spektroskopie eingesetzt. Da aus einzelnen Messungen eineTrennung der Rausch- und Signalanteile oft nicht moglich ist, kann das SNR mit statistischenMethoden berechnet werden. Unter der Voraussetzung, dass Messungen, die unter gleichenMessbedingungen erzeugt wurden, normalverteilt sind, kann das Nutzsignal durch den Mittelwert
14engl.: oversampling15entspricht Butterworth 1. Ordnung, 20 dB/Dekade16engl.: signal-to-noise-ratio
16

3 Grundlagen
(µ) und das Rauschen durch die Standardabweichung (σ) reprasentiert werden. Das SNR istsomit das Verhaltnis dieser beiden Großen.
SNR =µ
σ
SNRdB = 10 · log(µ
σ)
(3.8)
[Smi02, S. 17]
In Messwerten konnen allgemein zwei dominante Kategorien von Fehlern auftreten. Die Abwei-chung der erhobenen Messwerte von den realen Werten wird als Genauigkeit17 der Messungbezeichnet. Eine schlechte Genauigkeit resultiert aus systematischen Fehlern, die wiederumdurch eine Kalibration korrigiert werden konnen. Im einfachsten Fall konnte dies ein zusatzlicherOffset sein, der von Messwerten abgezogen werden muss, um den realen Wert zu erreichen. DieSchwankungen zwischen Messwerten, die unter gleichen Bedingungen erhoben wurden, entstehtaus zufalligen Fehlern (z. B. Rauschen) und wird als Prazision18 der Messung bezeichnet.Ein mogliches Maß fur die Prazision ist daher das SNR. Durch eine Mittelung zwischen denMesswerten kann immer die Prazision verbessert werden. Da das behandelte Sensorsystemjedoch in einem Sicherheitskontext eingesetzt wird und eine Mittelung die Reaktionsgeschwin-digkeit reduziert, wird in dieser Arbeit auf eine zusatzliche Mittelung der Messungen verzichtet.
[Smi02, S. 32ff]
3.2.3 Diskrete Fourier-Transformation
Die Fourier-Analyse ist eine Sammlung von mathematischen Techniken, die alle darauf beruhen,ein Signal in seine Sinus- bzw. Frequenzkomponenten zu zerlegen. Je nach Eigenschaft desEingangsignals (diskret/kontinuierlich, periodisch/aperiodisch) gibt es verschiedene Transforma-tionen. Die diskrete Fourier-Transformation19 (DFT) bildet ein diskretes, periodisches Signal imZeitbereich auf sein diskretes, periodisches Frequenzspektrum ab. Fur ein (komplexes) Signal xder Lange Nw wird die (komplexe) DFT wie folgt berechnet:
y[k] =1
N
Nw−1∑n=0
x[n]e−j2πkn/Nw , 0 ≤ k ≤ Nw − 1 (3.9)
Obwohl die DFT auch fur komplexe Signale definiert ist, entspricht in praktischen Anwendungendas Messsignal dem Realanteil und der Imaginaranteil wird mit Nullen initialisiert. Es werdendabei sowohl die positiven (0 ≤ k ≤ Nw/2− 1) als auch die negativen Frequenzen (Nw/2 ≤k ≤ Nw − 1) berechnet, wobei aufgrund der Symmetrie zwischen den positiven und negativenFrequenzen nur die erste Halfte des Spektrums interessant ist. Des Weiteren ist das diskreteFrequenzspektrum periodisch und wiederholt sich fur k ≥ Nw−1 bzw. k ≤ 0. [Smi02, S. 570f]
Die DFT berechnet aus Nw Messwerten in einem Messfenster der Lange tw = Nw/fs genauNw Frequenzkomponenten im Frequenzbereich [0, fs]. Somit ist die diskrete Frequenzauflosung∆f umgekehrt proportional zur Lange des Messfensters und die großte sichtbare Frequenz im
17engl.: accuracy18engl.: precision19engl.: discrete fourier transform
17
3 Grundlagen
Frequenzspektrum entspricht der Nyquistrate, da zwischen Nyquistrate und Abtastrate dienegativen Frequenzen liegen.
∆f =fsNw
=1
tw(3.10)
Wird mit der DFT das Frequenzspektrum eines diskreten, periodischen Signals berechnet, basiertdie Berechnung auf einem endlichen Messfenster. Eine wichtige Voraussetzung fur die korrekteBerechnung ist, dass sich innerhalb dieses Messfensters eine ganzzahlige Anzahl von Periodendes Eingangssignals befinden. Da fur die DFT sowohl der Zeit- als auch der Frequenzbereichkreisformig bzw. periodisch sind, konnen die Endpunkte als miteinander verbunden interpretiertwerden. Durch eine unpassende Wahl der Abtastrate oder Fenstergroße kann es vorkommen,dass diese Voraussetzung nicht erfullt ist und es bei Verbindung der Endpunkte zu Sprungstellenbzw. Diskontinuitaten kommt, die in dem ursprunglichen Signal nicht enthalten waren. DieseSprungstellen erzeugen im Signal zusatzliche Frequenzkomponenten, die deutlich oberhalb derNyquistrate liegen konnen und durch Aliasing auf den darstellbaren Bereich abgebildet werden.Das resultierende Frequenzspektrum ist daher nicht identisch mit dem des eigentlichen Signalsund weist zusatzliche auslaufende Frequenzanteile auf. Es wirkt, als ob ein Frequenzanteil inandere Frequenzen auslauft, dementsprechend wird dieser Effekt als spektrale Streuung20 oderLeck-Effekt bezeichnet. [Ins16]
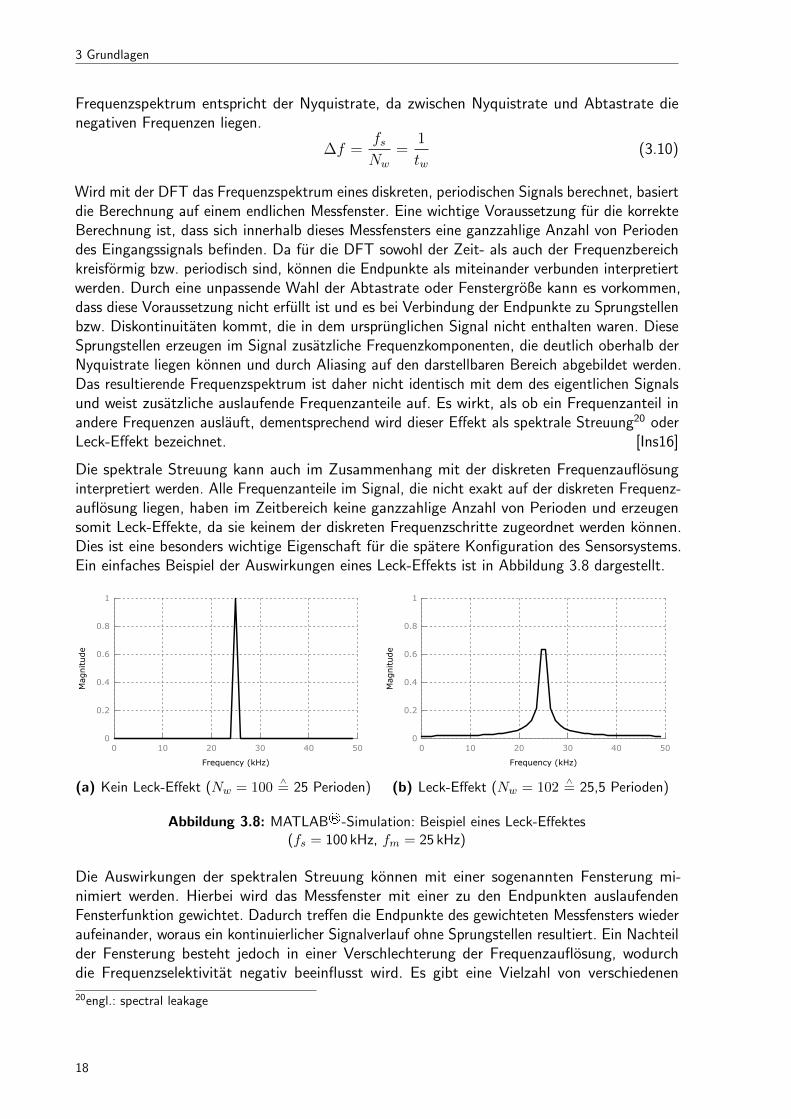
Die spektrale Streuung kann auch im Zusammenhang mit der diskreten Frequenzauflosunginterpretiert werden. Alle Frequenzanteile im Signal, die nicht exakt auf der diskreten Frequenz-auflosung liegen, haben im Zeitbereich keine ganzzahlige Anzahl von Perioden und erzeugensomit Leck-Effekte, da sie keinem der diskreten Frequenzschritte zugeordnet werden konnen.Dies ist eine besonders wichtige Eigenschaft fur die spatere Konfiguration des Sensorsystems.Ein einfaches Beispiel der Auswirkungen eines Leck-Effekts ist in Abbildung 3.8 dargestellt.
0
0.2
0.4
0.6
0.8
1
0 10 20 30 40 50
Mag
nitude
Frequency (kHz)
(a) Kein Leck-Effekt (Nw = 100∧= 25 Perioden)
0
0.2
0.4
0.6
0.8
1
0 10 20 30 40 50
Mag
nitude
Frequency (kHz)
(b) Leck-Effekt (Nw = 102∧= 25,5 Perioden)
Abbildung 3.8: MATLAB®-Simulation: Beispiel eines Leck-Effektes(fs = 100 kHz, fm = 25 kHz)
Die Auswirkungen der spektralen Streuung konnen mit einer sogenannten Fensterung mi-nimiert werden. Hierbei wird das Messfenster mit einer zu den Endpunkten auslaufendenFensterfunktion gewichtet. Dadurch treffen die Endpunkte des gewichteten Messfensters wiederaufeinander, woraus ein kontinuierlicher Signalverlauf ohne Sprungstellen resultiert. Ein Nachteilder Fensterung besteht jedoch in einer Verschlechterung der Frequenzauflosung, wodurchdie Frequenzselektivitat negativ beeinflusst wird. Es gibt eine Vielzahl von verschiedenen
20engl.: spectral leakage
18

3 Grundlagen
Fensterfunktionen (z. B. Hamming oder Blackman-Harris), die anhand der Charakteristik desMesssignals ausgewahlt werden konnen. Bei Verzicht auf eine zusatzliche Fensterung, wirdimplizit ein Rechteck-Fenster21 verwendet, welches im gesamten Fensterbereich den Wert 1aufweist. Da in dieser Arbeit jedoch durch eine passende Wahl von Systemparametern eine spek-trale Streuung vermieden werden kann, wird auf den Einsatz einer Fensterfunktion verzichtetund an dieser Stelle nicht naher betrachtet.
Die Verarbeitungszeit eines Algorithmus hangt im Wesentlichen von der Anzahl der Operatio-nen ab, die ausgefuhrt werden. Fur die Berechnung der Nw Frequenzkomponenten mit demDFT-Algorithmus werden ca. N2
w komplexe Multiplikationen benotigt. Die schnelle Fourier-transformation22 (FFT) ist ein effizienter Algorithmus zur Berechnung der DFT und wurdeim Jahre 1965 von Cooley und Tukey entwickelt. Mit der FFT kann der Berechnungsaufwandauf ca. Nwlog2(Nw) komplexe Multiplikationen reduziert werden. Da die FFT durch rekursiveAufteilung das Messfenster in jedem Schritt halbiert, muss die Große des Messfensters eineZweierpotenz sein. In manchen Anwendungen, in denen nur wenige Frequenzkomponentenbenotigt werden, kann es jedoch vorteilhaft sein, diese direkt und nicht mit der FFT zuberechnen. [Smi02, S. 225, 237]
3.2.4 Digitale Filter
Signalfilter konnen fur zwei Aufgaben eingesetzt werden: die Separation sich uberlagernderSignale bzw. die Restauration von Signalformen. Analoge und digitale Filter konnen grundsatzlichfur die gleichen Aufgaben eingesetzt werden. Analoge Filter sind besonders schnell, fur mancheAnwendungen gunstiger und haben einen großen Dynamikbereich, wohingegen digitale Filtereine deutlich großere Leistungsfahigkeit erbringen konnen (z. B. im Bezug auf Genauigkeit,Reproduzierbarkeit und Storfestigkeit). Jedes lineare Filter kann durch seine Impulsantwort,Sprungantwort oder Frequenzantwort beschrieben werden. Alle diese Antworten beinhaltendie kompletten Informationen des Filters und konnen daher ineinander transformiert werden.Wahrend die Impuls- bzw. Sprungantwort das Verhalten des Filters im Zeitbereich beschreibt,wird durch die Frequenzantwort das Verhalten im Frequenzbereich beschrieben. Diese Trennungist wichtig fur das Filterdesign, da es nicht moglich ist, ein Filter fur beide Bereiche zu optimieren.Eine gute Leistung im Zeitbereich hat eine schlechte Leistung im Frequenzbereich zur Folgeund umgekehrt. [Smi02, S. 261f, 265f]
Das in dieser Arbeit eingesetzte Sensorsystem ubertragt mehrere Signale auf verschiedenenFrequenzen. Daher werden in der digitalen Signalverarbeitungskette fur den Frequenzbereichoptimierte Tiefpassfilter eingesetzt, um die verschiedenen Signalanteile voneinander trennen zukonnen. Die Frequenzantwort eines Tiefpassfilters wird in drei Teile unterteilt: Durchlassbereich23,Ubergangsbereich24 und Sperrbereich25 (siehe Abbildung 3.9). Im Ubergang zwischen Durchlass-und Ubergangsbereich liegt die Grenzfrequenz des Filters (fc), an welcher die Amplitude um−3 dB reduziert wurde. [Smi02, S. 268]
21auch Dirichlet-Fenster genannt22engl.: fast fourier transform23engl.: passband24engl.: transisiton band25engl.: stopband
19

3 Grundlagen
Transition Band
Passband Stopband
Frequency
Att
enu
atio
n
Abbildung 3.9: Typische Frequenzantwort eines Tiefpassfilters
Ein digitales Filter transformiert eine zeit- und wertdiskrete Eingangszahlenfolge x in einezeit- und wertdiskrete Ausgangszahlenfolge y In dieser Arbeit werden nur diskrete, lineare undzeitinvariante Systeme, sogenannte diskrete LTI26-Systeme betrachtet. Ein diskretes LTI-Systemkann vollstandig mit einer Differenzengleichung beschrieben werden, deren allgemeine Form inGleichung 3.11 dargestellt ist.
M−1∑i=0
aiy[n− i] =N−1∑i=0
bix[n− i] (3.11)
FIR-Filter
Die Gewichtungsfaktoren ai in der Gleichung 3.11 bestimmen die Starke (Ordnung) der Ruck-kopplung. Ein digitales Filter ohne Ruckkopplung (ai = 0, i > 0) liefert als Ausgangssignal diegewichtete Summe seines Eingangssignals und die allgemeine Differenzengleichung vereinfachtsich.
y[n] =N−1∑i=0
bix[n− i] (3.12)
Ein solches Filter wird als Filter mit endlicher Impulsantwort27 (FIR) bezeichnet, da die Impul-santwort immer eine endliche Lange besitzt (N+1 Werte). Durch die endliche Impulsantwort istein FIR-Filter unabhangig von seinen Gewichtungsfaktoren bi immer stabil. [Tie+02, S. 1031]
Einer der bekanntesten und einfachsten FIR-Filter ist der gleitende Mittelwert28. Wie sein Namebereits andeutet, wird ein Punkt im Ausgangssignal durch Mittelung einer Anzahl von Punktendes Eingangssignals berechnet. Dadurch sind die Gewichtungsfaktoren gleich-gewichtet undkonnen aus der Summe ausgeklammert werden.
y[n] =N−1∑i=0
1
Nx[n− i] =
1
N
N−1∑i=0
x[n− i] (3.13)
26engl.: linear time-invariant27engl.: finite impulse response28engl.: moving average
20

3 Grundlagen
Der gleitende Mittelwert ist grundsatzlich ein Zeitbereichsfilter und optimal zur Reduktion vonzufalligem weißen Rauschen. Abbildung 3.10 zeigt die Frequenzantwort eines solchen Filters 9.Ordnung. Es ist deutlich zu erkennen, dass die Flanke zwischen Durchlass- und Sperrbereich einegeringe Steilheit aufweist und die Dampfung im Sperrbereich nicht gut ist. Dies macht ihn zueinem schlechten Tiefpassfilter (Trennung von Frequenzen) aber zu einem guten Glattungsfilter.
[Smi02, S. 217ff]
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Att
enuat
ion
Normalized Frequency
Abbildung 3.10: Frequenzantwort eines 10-Punkt gleitenden Mittelwertes (FIR 9. Ordnung)
In den meisten Anwendungen ist die Filterordnung deutlich geringer als die Große des Messfens-ters, da sich das Ausgangssignal je nach Filterimplementation um die Große der Filterordnungverkleinert. Wird jedoch der gleitende Mittelwert verwendet, um das Messfenster auf eineneinzigen gefilterten Messwert zu komprimieren, ergibt sich eine weitere interessante Eigenschaft.Bei einer Abtastrate von fs ist die Frequenzantwort eines N -Punkt gleitenden MittelwertesNull bei Frequenzen, die ein Vielfaches von fs/N sind. Entspricht die Lange des Mittelwertesder Große des Messfensters (d. h. Nw = N), so liegen diese Nullstellen exakt auf der diskretenFrequenzauflosung ∆f . Somit werden alle Frequenzen bis auf den Gleichanteil effektiv gefiltert.
[Mas+08]
IIR-Filter
Ein rekursives Filter berechnet sein Ausgangssignal nicht nur anhand seines Eingangssignals,sondern auch mithilfe des ruckgekoppelten Ausgangssignals. Durch die Ruckkopplung kanndieser Filtertyp eine unendlich lange Impulsantwort liefern und wird daher auch Filter mitunendlicher Impulsantwort29 (IIR) genannt. Daher kann ein solches Filter durch unpassendeWahl von Filterkoeffizienten auch instabil werden. Die Differenzengleichung eines IIR-Filters istin Gleichung 3.14 dargestellt.
y[n] =1
a0
(N−1∑j=0
bjx[n− j]−M−1∑i=1
aiy[n− i]
)(3.14)
Bekannte IIR-Filter basieren haufig auf erprobten analogen Filtervarianten. Mithilfe einerbilinearen Transformation konnen die Pol- und Nullstellen der komplexen s-Ebene des analogen
29engl.: infinite impulse response
21

3 Grundlagen
Filters auf die komplexe z-Ebene des digitalen Filters abgebildet werden. Hierbei wird diejω-Achse der s-Ebene auf den Einheitskreis der z-Ebene abgebildet. Diese Transformationzwischen kontinuierlichen und diskreten Frequenzen ist nie linear und wird an dieser Stelle nichtweiter ausgefuhrt. [Opp+99, S.450f]
Abbildung 3.11 zeigt einige IIR-Filter im direkten Vergleich. Der Butterworth-Filter hat einenrelativ sanften Ubergang zwischen Durchlass- und Sperrbereich, wahrend der Chebychev-Filtereinen sehr steilen Ubergang hat. Jedoch weisen die Chebychev-Filter entweder im Sperr- (TypI) oder im Durchlassbereich (Typ II) eine Welligkeit auf.
-100
-80
-60
-40
-20
0
0 0.2 0.4 0.6 0.8 1
Att
enuat
ion (
dB)
Normalized Frequency
ButterworthChebyshev Type I
Chebyshev Type II
Abbildung 3.11: Vergleich bekannter IIR-Filter 4. Ordnung (fc = 0, 2)
In praktischen Anwendungen werden IIR-Filter ublicherweise als Filter 2. Ordnung implementiert.Dies hat die Vorteile, dass die Empfindlichkeit der Filterkoeffizienten gegenuber Quantisie-rungsfehlern nicht stark zum Tragen kommt und dass interne Uberlaufe beim Aufsummiereni. d. R. nicht auftreten. Hohere Ordnungen konnen dann durch Kaskadieren von Filtern 2.Ordnung erreicht werden. Es gibt zwei gangige Implementationsstrukturen (Direktformen). DieDirekt-Form I kann unmittelbar aus der Differenzengleichung abgeleitet werden und verwen-det nur einen Akkumulator, wohingegen die Direkt-Form II mit einer minimalen Anzahl vonVerzogerungsgliedern auskommt und zwei Akkumulatoren benotigt. Ein erheblicher Vorteilvon IIR-Filtern im Vergleich zu FIR-Filtern ist, dass sie eine deutlich geringere Filterordnungbenotigen, wodurch sie bedeutend schneller in der Ausfuhrung sind.
3.3 Lock-In-Verstarker
Ein Lock-In-Verstarker ist ein Filter bzw. Verstarker zur Messung der Amplitude und Phaseeines Wechselsignals, welches mit einem bekannten Referenzsignal moduliert ist. Mithilfe desReferenzsignals wird ein Einrasten (engl. lock-in) auf die relevante Signalfrequenz ermoglicht,wahrend alle anderen Signalanteile ignoriert werden. Somit stellt ein Lock-In-Verstarker einextrem schmalbandiges Bandpassfilter dar und ermoglicht die Messung von Signalen, die tiefim Grundrauschen vergraben sind. Die Idee der Lock-In-Verstarkung wurde zum ersten Malvon Dicke im Jahre 1946 vorgestellt [Dic46], dabei gibt es je nach Hintergrund verschiedeneBezeichnung fur diese Technik (z. B. synchrone Detektion, phasensensitive Detektion oderIQ-Demodulation).
22

3 Grundlagen
3.3.1 Theorie & Anwendungsbereiche
Alle Signale unterliegen den Einflussen von additiven Rauschkomponenten, wodurch Abweichun-gen von deren realen Werten auftreten. In vielen Systemen nehmen diese Storungen mit fallenderFrequenz zu. Zum Beispiel zeigen Operationsverstarker 1/f-Rauschen30 und Lichtmessungen mitoffenem Aufbau unterliegen starken Storungen aufgrund von wechselnden Umgebungslichtbe-dingungen. Wird die Messung in eine hohere Frequenz verschoben und ist somit weiter entferntvon solchen niederfrequenten Rauschquellen, kann ein hoheres Signal-Rausch-Verhaltnis erreichtund selbst noch ein schwaches Signal detektiert werden. Die Wiederherstellung des moduliertenSignals konnte durch einen schmalbandigen Bandpass-Filter vorgenommen werden, der alleunerwunschten Frequenzanteile entfernt. Praktisch ist es jedoch sehr herausfordernd, einenschmalbandigen Bandpass-Filter mit diskreten Komponenten zu realisieren. Alternativ kannein Lock-In-Verstarker verwendet werden, um das modulierte Signal auf ein Gleichstromsignalzuruckzufuhren, wahrend alle anderen Signalanteile effektiv gefiltert werden. [Oro14]
Abbildung 3.12 zeigt eine einfache Anwendung eines Lock-In-Verstarkers. Eine Lichtquelle wirdmit einer festen Frequenz moduliert, beleuchtet eine Oberflache und eine Photodiode misstdas reflektierte Licht. Das Referenz- und das Messsignal sind Sinusschwingungen mit gleicherFrequenz und Phase. Das Referenzsignal hat eine feste Amplitude, wahrend die Amplitude desgemessenen Signals von dem reflektierten Licht abhangt.
Abbildung 3.12: Anwendungsbeispiel Lock-In-Verstarker [Oro14]
Um nun die Amplitude des Nutzsignals zu demodulieren, wird folgender Sachverhalt ausgenutzt:Wenn zwei harmonische Schwingungen miteinander multipliziert werden, ist das Ergebnis einSignal mit Frequenzanteilen an der Summe und der Differenz der Schwingungsfrequenzen.Haben beide Signale die gleiche Frequenz, so ist das Ergebnis ein Signal, welches konstanteSignalanteile und Anteile in der doppelten Frequenz aufweist (siehe Gleichung 3.15). Dasnegative Vorzeichen bei den doppelten Frequenzanteilen zeigt eine 180° Phasenverschiebung an.
30auch rosa Rauschen
23

3 Grundlagen
Mit einem Tiefpass konnen anschließend alle Frequenzen bis auf die konstanten Signalanteileeliminiert werden. Nach diesem Prinzip lassen sich die gesuchten Werte ermitteln.
A sin(2πft) ·B sin(2πft) =1
2AB(cos(2πft− 2πft)− cos(2πft+ 2πft))
=1
2AB(1− cos(4πft))
=1
2AB − 1
2AB cos(4πft)
(3.15)
[Bro+05, S. 82]
3.3.2 Implementierung
In der Fachliteratur werden grundsatzlich zwei Implementationen eines Lock-In-Verstarkersbeschrieben: Single-Phase oder Dual-Phase. Die Abbildung im vorigen Kapitel zeigt ein Single-Phase-Beispiel. In einem solchen Aufbau mussen Messsignal und Referenzsignal phasengleichsein. Daher muss eines der beiden Signale ggf. kunstlich phasenverschoben werden, um diePhasengleichheit herzustellen. Im Dual-Phase-Aufbau wird das Messsignal dagegen mit demReferenzsignal und dem 90° phasenverschobenen Referenzsignal multipliziert (siehe Abbildung3.13). Nach der Tiefpassfilterung liefert der Betrag der beiden entstehenden Signale ein Ergebnis,welches unabhangig von der Phase ist. Zusatzlich kann die unbekannte Phasenverschiebungzwischen Mess- und Referenzsignal berechnet werden. [Sta13]
Abbildung 3.13: Dual-Phase Lock-In-Verstarker [Oro14]
In beiden vorgestellten Beispielen wird dasselbe Signal sowohl zur Anregung des Messsignalsals auch zur Multiplikation verwendet. Allgemein muss dies jedoch nicht der Fall sein, sodassin einem Lock-In-Verstarker drei verschiedene Signale existieren konnen: das Tragersignal (zurAnregung), das Messsignal (vom Sensor) und das Referenzsignal (zur Lock-In-Detektion). DasMesssignal kann neben den (angeregten) Tragersignalfrequenzen noch weitere Signalanteileenthalten, die durch externe Storsignale erzeugt werden konnten. Alle Frequenzanteile, dieim Referenzsignal enthalten sind, werden aus dem Messsignal bei der Lock-In-Detektion
24

3 Grundlagen
demoduliert. Haben Trager- und Referenzsignal nicht den gleichen Ursprung (d. h. sie sind nichtphasenstarr), hangt die Leistung des Lock-In-Verstarkers von der Gute der Signalerzeugung ab.
Der Lock-In-Verstarker ist eine schon lange bekannte Technik. Daher gibt es eine Vielzahl vonLaborgeraten und integrierten Schaltungen, die darauf basieren. In dieser Arbeit wird jedochversucht, den Hardware-Aufwand zugunsten einer Software-basierten Losung zu minimieren,indem der komplette Lock-In-Verstarker als digitale Variante implementiert wird. Hierbei wirdder Sensor mit einem schnellen ADC von einem leistungsstarken Mikrocontroller bei einer festenAbtastrate ausgelesen, um das Messsignal zu generieren. Das hinreichend prazise Tragersignalkann von der Peripherie des Mikrocontrollers erzeugt werden. Somit haben das Messsignal (durchexterne Hardware phasenverschoben), das Referenzsignal (in Software gespeichert) und dasTragersignal (von interner Hardware erzeugt) keinerlei Phasenbeziehung. Durch eine Dual-PhaseImplementierung ist die Lock-In-Detektion dennoch anwendbar. Der digitale Lock-In-Verstarkerist stark verwandt mit der diskreten Fourier-Transformation. Wenn die Referenzsignale auseinzelnen Sinusschwingungen bestehen, dann sind beide mathematisch identisch.
Die Prinzipien der Lock-In-Detektion konnen auch zur Distanzmessung verwendet werden,indem eine Laufzeitmessung31 (ToF) durchgefuhrt wird. ToF-Kamerasysteme sind in der Lagefur jeden ihrer Bildpixel die Distanz zum Objekt zu berechnen. Hierfur werden jedoch sehr hoheTragersignalfrequenzen bzw. Abtastraten benotigt. Deshalb ist die Laufzeitmessung in demaktuellen Sensorsystem nicht anwendbar und wird an dieser Stelle nicht weiter ausgefuhrt. ImAnhang der Arbeit findet sich eine Abschatzung der Voraussetzungen32. [Foi+11]
3.3.3 Multichannel Lock-In-Detektion
Der eingesetzte Sensor ist ein multispektrales Sensorsystem, welches mehrere Wellenlangenverwendet. Daher ist eine Besonderheit des digitalen Lock-In-Verstarkers, dass simultan mehrereverschiedene Tragersignale verwendet werden und sich im Messsignal uberlagern. Fur jedesTrager- bzw. Referenzsignal muss die Lock-In-Detektion separat ausgefuhrt werden.
Die Tragersignale bestehen aus periodischen Schwingungen, die sich in einem gemeinsamenUbertragungsmedium ausbreiten. Hierbei kann davon ausgegangen werden, dass (naherungswei-se) das (ungestorte) Superpositionsprinzip gilt. D. h. jede Schwingung breitet sich aus, als obdie anderen gar nicht existierten. An einem bestimmten Betrachtungspunkt des Raumes (demDetektor) uberlagern sich die Schwingungen additiv. Je nach Frequenz, Amplitude und Phaseder sich uberlagernden Schwingungen konnen hierbei verschiedene Erscheinungen auftreten.
Haben die Schwingungen die gleiche Frequenz, so treten Interferenzen auf. Die resultierendeSchwingung kann je nach Phasenverschiebung der Einzelschwingungen verstarkt, gedampftoder ausgeloscht werden. Sind die Schwingungen in Phase, wird dies konstruktive Interferenzgenannt und die Amplituden addieren sich. Bei der destruktiven Interferenz hingegen sind dieSchwingungen gegenphasig und konnen sich gegenseitig komplett ausloschen, wenn sie diegleiche Amplitude aufweisen. [Her+12, S. 450f]
Wenn sich die Frequenzen der uberlagernden Schwingungen nur geringfugig unterscheiden,dann treten sogenannte Schwebungen auf. Die Amplitude der resultierenden Schwingungist nicht konstant sondern schwillt periodisch an und wieder ab. Je naher die Frequenzen
31engl.: time of flight32siehe Kapitel A.2
25

3 Grundlagen
beieinander liegen, desto langsamer geschieht dieser Vorgang. Abbildung 3.14 zeigt ein einfachesSchwebungsbeispiel. [Her+12, S. 452f]
-3
-2
-1
0
1
2
3
0 0.5 1 1.5 2
Val
ue
Time (ms)
(a) Zeitbereich
0
0.2
0.4
0.6
0.8
1
0 10 20 30 40 50
Mag
nitude
Frequency (kHz)
(b) Frequenzbereich
Abbildung 3.14: MATLAB®-Simulation: Schwebungsbeispiel(fs = 100 kHz, Nw = 200, fmi = 24 kHz, 25 kHz, 26 kHz)
3.4 Maschinelles Lernen
Maschinelles Lernen ist ein Teilgebiet der Informatik, welches sich mit der (automatischen)Generierung von Wissen aus Erfahrung beschaftigt. Die Erfahrung wird dabei anhand vonBeispielen zur Verfugung gestellt, aus denen ein kunstliches System in einem Trainingsprozesslernen und anschließend verallgemeinern soll. Dabei werden Muster und Gesetzmaßigkeitenabgeleitet, um anschließend auch unbekannte, nicht trainierte Daten beurteilen zu konnen.
Eine wichtige Disziplin des maschinellen Lernens ist die Klassifikation von Objekten. Dieverschiedenen Objekte werden dabei anhand von Merkmalen unterschieden. Alle Auspragungen,die ein Merkmal annehmen kann, konnen in einer Menge Ai zusammengefasst werden. EineAnzahl m von verschiedenen Merkmalen bildet zusammen einen Merkmalsraum M = A1 ×...×Am, in dem jedes Objekt durch einen Vektor x ∈ M reprasentiert wird. Jedem der Objektein dem Merkmalsraum kann wiederum eine von k verschiedenen Klassen yi zugewiesen werden,die in einer Menge K = {y1, ..., yk} zusammengefasst sind. Ein Klassifikator C ist eine Funktion,die ein Objekt auf eine Klasse abbildet (C : M→ K). Fur die Konstruktion bzw. das Trainingdes Klassifikators werden hinreichend viele Objekte mit ihrer Klassenzugehorigkeit benotigt, diein einer Trainingsmenge T zusammengefasst werden:
T = {(x, yi) ∈ M×K | yi ist die Klassenzugehorigkeit von x} (3.16)
In dieser Arbeit sind die Merkmale numerisch, wodurch der Merkmalsraum ein mehrdimensio-naler reeller Vektorraum (Rm) ist. Des Weiteren werden nur binare Klassifikationsproblemebehandelt (d. h. |K| = k = 2), da das verwendete Sensorsystem nur Haut von allen ande-ren Materialoberflachen unterscheiden muss und fur diesen Anwendungsfall konzipiert wurde.Die folgenden Abschnitte beschreiben die Klassifikation mittels Entscheidungsbaumen sowieMethoden zur Beurteilung von Klassifikatoren.
26

3 Grundlagen
3.4.1 Entscheidungsbaume
Entscheidungsbaume konnen verwendet werden, um Objekte zu klassifizieren. Hierbei wird derBaum vom Wurzelknoten entlang abwarts durchlaufen. In jedem Knoten wird ein Merkmalabgefragt und ein Folgeknoten anhand seiner Auspragung ausgewahlt, bis ein Blatt erreicht ist.Die Blatter des Baumes enthalten jeweils eine Klasse und entsprechen somit einer Klassifikationdes Objektes. Bekannte Algorithmen fur die Konstruktion von Entscheidungsbaumen sind z. B.der Classification And Regression Tree (CART) von Breiman et al. [Bre+84] und der IterativeDichotomiser 3 (ID3) von Quinlan [Qui86]. In dieser Arbeit kommt der C4.5 [Qui93] zumEinsatz, der eine Weiterentwicklung des ID3 ist.
Der ID3-Algorithmus erstellt Entscheidungsbaume nach einem rekursiven Top-Down-Verfahren.Die Trainingsmenge T kann anhand der Auspragungen eines Merkmals Ai in n disjunkteTeilmengen aufgeteilt werden (T1, ..,Tn), wobei alle Objekte einer Teilmenge die gleicheAuspragung dieses Merkmals aufweisen. Der Algorithmus wahlt fur einen Knoten das Merkmalmit dem großten Informationsgewinn hinsichtlich der Klassifikation und teilt die Trainingsmengeanhand dieses Merkmals. Anschließend wird rekursiv fur jede der Teilmengen ein Teilbaumnach dem gleichen Verfahren erstellt, solange bis alle Objekte einer Teilmenge derselben Klasseangehoren und ein Blatt erzeugt wird.
Der Informationsgewinn fur die Auswahl eines Merkmals an einem Knoten wird indirekt uberdie Entropie beschrieben und beginnt mit dem Informationsgehalt I(T) der Trainingsmenge:
I(T) =k∑i=1
−P(yi) log2P(yi), (3.17)
wobei P(yi) die Wahrscheinlichkeit fur das Auftreten der Klasse yi darstellt. Es wird angenom-men, dass das Auftreten der Klassen gleichverteilt ist. Somit kann die Wahrscheinlichkeit wiefolgt berechnet werden:
P(yi) =|{(x, y) ∈ T | y = yi|
|T|(3.18)
Fur ein ausgewahltes Merkmal, mit seinen Auspragungen Ai, ist die voraussichtlich fur dieFertigstellung des Baumes benotigte erforderliche Informationsmenge:
E(Ai) =n∑j=1
|Tj||T|I(Tj) (3.19)
Der Informationsgewinn eines Merkmals G(Ai) kann nun berechnet werden, indem die zurFertigstellung erforderliche Informationsmenge vom Informationsgehalt der Trainingsmengesubtrahiert wird.
G(Ai) = I(T)− E(Ai) (3.20)
Das Merkmal mit dem großten Informationsgewinn wird ausgewahlt, um die Trainingsmengeaufzuteilen und den Algorithmus rekursiv fur jede der Teilmengen auszufuhren.
[Qui86][Lug01, S. 415ff]
Der C4.5 als Weiterentwicklung unterscheidet sich vom Grundgedanken her nicht vom ID3. Eswurden Verbesserungen in der Handhabung vorgenommen (numerische und fehlende Merkmals-
27
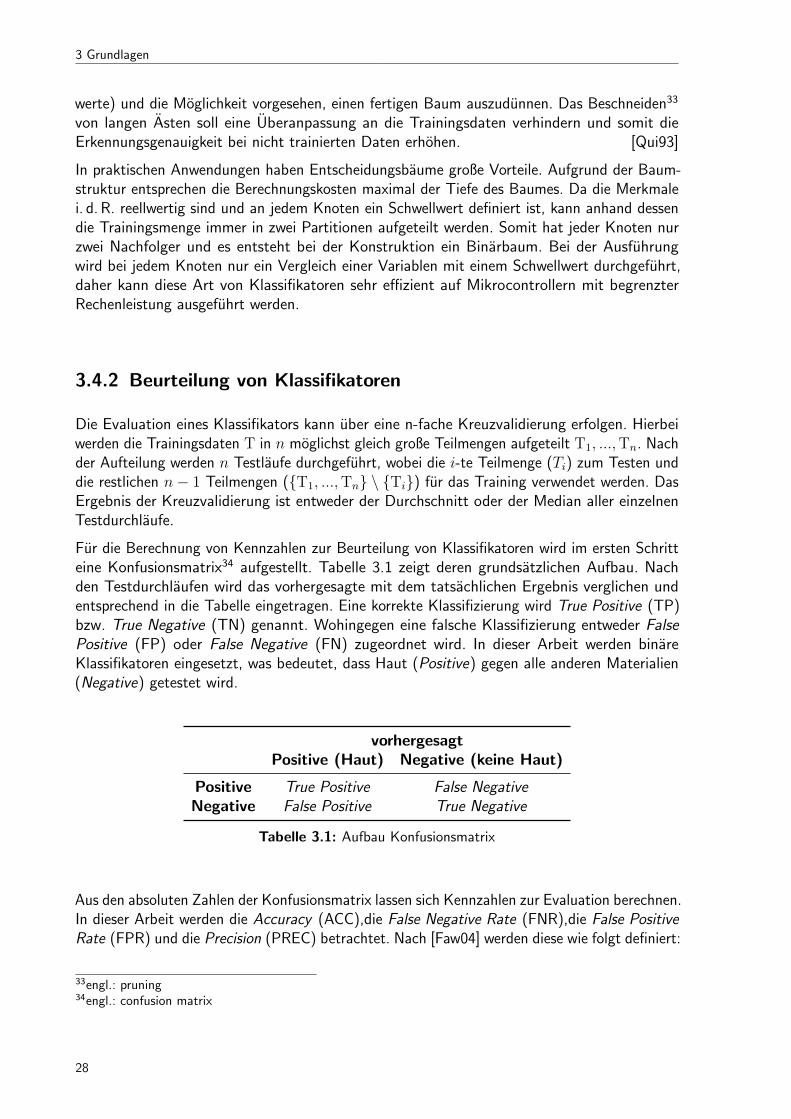
3 Grundlagen
werte) und die Moglichkeit vorgesehen, einen fertigen Baum auszudunnen. Das Beschneiden33
von langen Asten soll eine Uberanpassung an die Trainingsdaten verhindern und somit dieErkennungsgenauigkeit bei nicht trainierten Daten erhohen. [Qui93]
In praktischen Anwendungen haben Entscheidungsbaume große Vorteile. Aufgrund der Baum-struktur entsprechen die Berechnungskosten maximal der Tiefe des Baumes. Da die Merkmalei. d. R. reellwertig sind und an jedem Knoten ein Schwellwert definiert ist, kann anhand dessendie Trainingsmenge immer in zwei Partitionen aufgeteilt werden. Somit hat jeder Knoten nurzwei Nachfolger und es entsteht bei der Konstruktion ein Binarbaum. Bei der Ausfuhrungwird bei jedem Knoten nur ein Vergleich einer Variablen mit einem Schwellwert durchgefuhrt,daher kann diese Art von Klassifikatoren sehr effizient auf Mikrocontrollern mit begrenzterRechenleistung ausgefuhrt werden.
3.4.2 Beurteilung von Klassifikatoren
Die Evaluation eines Klassifikators kann uber eine n-fache Kreuzvalidierung erfolgen. Hierbeiwerden die Trainingsdaten T in n moglichst gleich große Teilmengen aufgeteilt T1, ...,Tn. Nachder Aufteilung werden n Testlaufe durchgefuhrt, wobei die i-te Teilmenge (Ti) zum Testen unddie restlichen n− 1 Teilmengen ({T1, ...,Tn} \ {Ti}) fur das Training verwendet werden. DasErgebnis der Kreuzvalidierung ist entweder der Durchschnitt oder der Median aller einzelnenTestdurchlaufe.
Fur die Berechnung von Kennzahlen zur Beurteilung von Klassifikatoren wird im ersten Schritteine Konfusionsmatrix34 aufgestellt. Tabelle 3.1 zeigt deren grundsatzlichen Aufbau. Nachden Testdurchlaufen wird das vorhergesagte mit dem tatsachlichen Ergebnis verglichen undentsprechend in die Tabelle eingetragen. Eine korrekte Klassifizierung wird True Positive (TP)bzw. True Negative (TN) genannt. Wohingegen eine falsche Klassifizierung entweder FalsePositive (FP) oder False Negative (FN) zugeordnet wird. In dieser Arbeit werden binareKlassifikatoren eingesetzt, was bedeutet, dass Haut (Positive) gegen alle anderen Materialien(Negative) getestet wird.
vorhergesagtPositive (Haut) Negative (keine Haut)
Positive True Positive False NegativeNegative False Positive True Negative
Tabelle 3.1: Aufbau Konfusionsmatrix
Aus den absoluten Zahlen der Konfusionsmatrix lassen sich Kennzahlen zur Evaluation berechnen.In dieser Arbeit werden die Accuracy (ACC),die False Negative Rate (FNR),die False PositiveRate (FPR) und die Precision (PREC) betrachtet. Nach [Faw04] werden diese wie folgt definiert:
33engl.: pruning34engl.: confusion matrix
28

3 Grundlagen
ACC =TP + TN
TP + FP + TN + FN
FNR =FN
TP + FN
FPR =FP
FP + TN
PREC =TP
TP + FP
(3.21)
Die Accuracy gibt den Anteil aller korrekten Klassifizierungen an, wohingegen die Precision sichnur auf die positive Klasse bezieht. Zur Beurteilung der Leistungsfahigkeit eines Sicherheitssen-sors sind jedoch gerade die Fehlklassifizierungen (False Positive bzw. False Negative) interessant.Die False Negative Rate ist der Anteil der falschlich als negativ klassifizierten Objekte. Ineinem Sicherheitskontext bedeutet dies, dass der Gefahrenfall eingetreten ist, jedoch nichterkannt wird und somit irreparable Schaden entstehen konnen. Die False Positive Rate hingegenist der Anteil der falschlich als positiv klassifizierten Objekte und hat eine Fehlauslosung derSicherheitsfunktion zur Folge. Obwohl dieser Fall aus Sicht der Arbeitssicherheit ungefahrlich ist,wird dadurch die Verfugbarkeit und die Akzeptanz verringert. Daher sollten auch ungefahrlicheFehleinschatzungen vermieden werden, um den Benutzer nicht in Versuchung zu fuhren, dieSicherheitsfunktion zu umgehen35.
35bekannt als”tampering“- von engl. to tamper with sth. (etw. manipulieren)
29


4 Analyse & Konzeption
4.1 Sensorsystem
Das in dieser Arbeit eingesetzte Sensorsystem ist eine Weiterentwicklung der am ISF entwickeltenPunktsensoren und wurde von der Firma Tippkemper-Matrix entworfen. Somit ist es ebenfallsfur die Unterscheidung von menschlicher Haut und gangigen Werkstoffen ausgelegt. Furdiesen Zweck kommen spezielle InGaAs1/InP2-LEDs und -Photodioden zum Einsatz. Insgesamtwerden drei verschiedene LED-Arten mit Peakwellenlangen von 1020 nm, 1200 nm und 1550 nmverwendet, welche ringformig in einem Ringlicht um die Empfangslinse angeordnet sind. Hinterder Empfangslinse befinden sich funf Photodioden in einem U-formigen Profil, von der jedeeinen eigenstandigen Messpunkt darstellt. Daher ist der Aufbau des Sensors eher mit denNIR-Kamerasystemen vergleichbar als mit den fruheren Punktsensoren (siehe Abbildung 4.1).
(a) Frontansicht (Real)
Ringlicht(LEDs)
Photodioden
(b) Frontansicht (CAD)
Abbildung 4.1: Sensor Frontansicht (Ringlicht und Empfangerlinse)
In den folgenden Abschnitten wird eine funktionale Beschreibung des Sensorsystems durch-gefuhrt, die optischen und optoelektronischen Komponenten analysiert und die analoge Signal-verarbeitung erlautert.
1Indiumgalliumarsenid2Indiumphosphid
31

4 Analyse & Konzeption
4.1.1 Funktionale Beschreibung
Die elektronischen Anteile des Sensorsystems sind insgesamt auf vier Platinen angeordnet. Dassogenannte World-Board stellt die Schnittstellen zur Außenwelt bereit und das Mainboardenthalt die Mikrocontroller inklusive der LED-Treiber. Die beiden weiteren Platinen (Receiverund Transmitter) stellen die elektronischen Anteile des optoelektronischen Sensormoduls dar.Abbildung 4.2 zeigt die Anordnung der verschiedenen Platinen innerhalb des Sensorsystems.
Abbildung 4.2: Innerer Aufbau des Sensorsystems
Die externen Schnittstellen lassen sich in drei Kategorien unterteilen: Versorgungsspannung,Ausgange der Sicherheitsfunktion und eine USB-Schnittstelle. Als Spannungsversorgung musseine 24 V Spannung bereitgestellt werden, die zur Erzeugung der Systemspannungen verwendetwird. Die Sicherheitsfunktion außerhalb des Sensors kann uber zwei synchron betriebeneAusgange angesteuert werden. Einer gibt ein binares Signal zwischen 24 V und 0 V aus,wohingegen der Zweite als Open-Drain-Ausgang fur die Ansteuerung eines Magnetventilsvorgesehen ist. Mit einem Magnetventil konnte direkt eine nachfolgende Sicherheitsfunktionausgelost werden, wie z. B. das Herunterfahren eines Abweisers, der einen Eingriff in denGefahrenbereich verhindert. Es wird im normalen Betrieb, solange keine Haut erkannt wurde,alle 500 ms ein Testimpuls ausgesendet, um ein Festhangen der Signalleitungen zu erkennen.Die (optionale) USB-Schnittstelle kann fur Diagnose- und Servicezwecke zur Kommunikationmit dem Sensorsystem verwendet werden. In dieser Arbeit ist jedoch die direkte Kommunikationmit dem Sensorsystem eine wichtige Voraussetzung, um die Messdaten fur Evaluationszweckezu ubertragen.
Auf dem Mainboard befinden sich zwei 32-Bit ARM® Cortex-Mikrocontroller von STMicroelec-tronics. Der Master-Controller ist ein leistungsstarker Cortex-M43 mit DSP4-Funktionalitatenund einer FPU5, damit fur die digitale Signalverarbeitungskette hinreichend viel Rechenleistungzur Verfugung steht. Zusatzlich steht eine native USB-Schnittstelle zur Kommunikation miteinem PC zur Verfugung. Die analogen Signale des Receivers werden mit dem integrierten
3STM32F405VGT4digital signal processor5floating point unit
32

4 Analyse & Konzeption
ADC quantisiert und je nach Signalstarke wird die Verstarkung in der analogen Signalverar-beitung adaptiv angepasst. Der Slave-Controller ist ein im Bezug auf den Master-Controllerleistungsschwacherer Cortex-M06, da fur seine Aufgaben nicht viel Rechenleistung benotigtwird. Mit der integrierten Timer-Peripherie werden die Tragersignale erzeugt und die LED-Treiber angesteuert. Außerdem wird der interne ADC fur Selbsttests verwendet, indem dieDurchlassspannungen der LEDs, die Versorgungsspannungen und die Temperatur des internenTemperatursensors periodisch gemessen werden. Beide Mikrocontroller kommunizieren ubereine serielle Schnittstelle7, um z. B. die Systemkonfiguration zu ubertragen oder periodischeDiagnose-Nachrichten auszutauschen. Die Ausgange der Sicherheitsfunktion konnen von beidenMikrocontrollern angesteuert werden, je nachdem ob Haut festgestellt wurde oder einer derSelbsttests einen Hardwarefehler erkannt hat.
Ein vereinfachtes Funktionsblockschaltbild des Sensorsystems ist in Abbildung 4.3 dargestellt.Dort ist ein isolierter Bereich zu erkennen, der den Receiver und den Master-Controller einschließt.Diese zusatzliche Isolierung soll eine galvanische Trennung zwischen der Erzeugung von Trager-und Messsignal erreichen, um mogliches Ubersprechen vom Sender zum Empfanger zu reduzieren.
MasterController
SlaveController
Netzteil (24V)
AND
PC
OR
LED-Treiber
UA
RT
ADC
PGA
PWM
ADC
USBUSB
Ausgänge der Sicherheits-
funktion
Digitaler Isolator
ReceiverSignalkonditionierung +
Photodioden
TransmitterNIR-LEDs
USB-Isolator
DC / DC Wandler(Isoliert)
MainboardWorld Board
Isolierter Bereich
DC / DC Wandler
Ausgangs-Treiber
Abbildung 4.3: Funktionsblockschaltbild des Sensorsystems
4.1.2 Optische Analyse
Die verschiedenen LED-Typen haben bei gleichem Vorwartsstrom (IF = 100 mA8) eine starkunterschiedliche optische Ausgangsleistung, obwohl sie vom selben Hersteller in der gleichenTechnologie gefertigt wurden. Dies lasst sich damit erklaren, dass die Energie eines Photonsumgekehrt proportional zu seiner Wellenlange ist9. Daher kommen in dem Ringlicht fur jede
6STM32F051K6T7CMOS-UART: nicht-invertierte 3,3 V-Signalpegel8maximal zulassiger Dauerstrichstrom nach Hersteller9siehe Gleichung 3.1 in Kapitel 3.1.2
33

4 Analyse & Konzeption
Wellenlange unterschiedlich viele LEDs zum Einsatz, um die optische Ausgangsleistung wiederanzugleichen. Die wichtigsten Kenngroßen der verwendeten LEDs sind in der Tabelle 4.1zusammengefasst und umfassen die Peakwellenlange λp, die Halbwertsbreite ∆λ0,5, die optischeAusgangsleistung Φe und den Offnungswinkel ϕ. Neben den LEDs fur die Materialerkennungist eine einzelne zusatzliche LED am außeren Rand des Ringlichtes positioniert, welche aufdie Innenseite des Abdeckglases der Sensorvorderseite gerichtet ist. Bei einer sehr starkenVerschmutzung des Abdeckglases oder einem zu geringem Messabstand wird eine zusatzlicheReflektion erzeugt und kann zur Selbstdiagnose verwendet werden.
Typ Anzahl λp(nm) ∆λ0,5(nm) Φe(mW) ΣΦe(mW) ϕ(°)
EOLD-1020-525 2 1020 50 20 40 20EOLD-1200-525 4 1200 70 7 28 20EOLD-1550-525 6 1550 130 5 30 20
Tabelle 4.1: Zusammenfassung der verwendeten NIR-LEDs zur Materialerkennung
Der optische Aufbau des Sensorsystems ist relativ einfach und besteht aus einer einzelnenabbildenden Empfangslinse. Diese ist eine symmetrische bikonvexe Sammellinse mit einerBrennweite von 40 mm bei einer Wellenlange von 587,6 nm10. Aufgrund der chromatischenAberration11 vergroßert sich die Brennweite bei hoheren Wellenlangen. Deshalb ist die Recei-verplatine, welche der Bildebene entspricht und einen festen Abstand zur Sammellinse hat,etwas weiter als die vom Hersteller angegebene Brennweite positioniert. Dadurch wird derBrennpunkt fur die verwendeten hoheren Wellenlangen im NIR-Bereich wieder in die Nahe derBildebene verschoben. Dennoch kann eine einzelne Linse die Auswirkungen der chromatischenAberration nicht korrigieren, weshalb eine unscharfe Abbildung auf die Bildebene stattfindet.Da der Punktsensor jedoch kein bildgebendes Verfahren darstellt, kann dies vernachlassigtwerden. Eine Abbildung auf die verschiedenen Photodioden bzw. Bildpunkte entsteht durchverschiedene Einfallswinkel der reflektierten NIR-Strahlung, wodurch die Messpunkte bei große-ren Messabstanden weiter auseinander liegen. Wie ublich bei abbildenden Systemen findet eineBildspiegelung bzw. Invertierung der Messpunkte statt, welche bei der Montage berucksichtigtwerden muss.
Der Sensor ist fur eine variable Messdistanz von 2 cm bis 25 cm vorgesehen. Daher sind LEDsin dem Ringlicht um 3° Richtung Zentrum geneigt, wodurch sich die vom Mittelpunkt derLEDs ausgehende NIR-Strahlung bei einem Abstand von 25 cm vor dem Sensor uberschneidet.Diese Neigung stellt bei geringen Messdistanzen sicher, dass trotz kleinem Offnungswinkelder LEDs hinreichend Strahlung in die Empfangslinse reflektiert werden kann. Wahrend derEntwicklungsphase wurde die Auswahl der Komponenten und insbesondere deren Ausrichtungzueinander mit einer Optiksimulation12 optimiert.
Ein Nachteil des Sensordesigns im Vergleich zu den fruheren Entwicklungen ist, dass keineintrinsische Messung der Distanz zur Messoberflache mehr moglich ist. Dennoch hat dieseKonstruktion deutliche Vorteile in Bezug auf die Fertigung und Kostenentwicklung. Durch denEinsatz eines Ringlichtes konnen handelsubliche 5 mm-LEDs verwendet und die Strahlungs-leistung durch Austauschen oder Hinzufugen von LEDs relativ leicht verandert werden. Ein
10Herstellerangabe11wellenlangenabhangiger Brechungsindex12FRED Optical Engineering (Photon Engineering LLC, http://photonengr.com/)
34

4 Analyse & Konzeption
weiterer Vorteil ist, dass jede der Photodioden fur sich einen Messpunkt darstellt und somit derSensor einen deutlich großeren Bereich in einer kompakteren Bauform uberwachen kann.
4.1.3 Analoge Signalverarbeitung
Das frequenzabhangige Verhalten des Sensorsystems wird durch eine fur den Anwendungsfalloptimierte analoge Signalkonditionierung auf dem Receiver bestimmt, welche exemplarisch fureine Photodiode in Abbildung 4.4 dargestellt ist. Damit auf eine negative Versorgungsspannungin dem System verzichtet werden kann, wird eine stabile Referenzspannung von 1,6 V generiertund als Vorspannung fur die Photodioden verwendet, um ein Signal zu erhalten, das um dieseSpannung oszilliert. Somit dient die Referenzspannung als eine Art virtuelle Masse fur die kom-plette analoge Schaltung und das Massepotential kann als negative Versorgungsspannung fur dieOperationsverstarker verwendet werden. Ebenfalls wird durch die Vorspannung der Photodiodedas elektrische Feld der Sperrschicht vergroßert, was zu einer schnelleren Ladungstrennungund zu einer Verbesserung des dynamischen Verhaltens fuhrt. Die bestrahlten Photodiodenerzeugen einen Strom, der von dem Transimpedanzverstarker in eine proportionale Spannungumgewandelt wird. Anschließend wird das Spannungssignal durch zwei Hochpasse mit einem da-zwischen positionierten nicht-invertierenden Verstarker gefuhrt. Durch die Hochpasse wird eineWechselstromkopplung erreicht, welche die Gleichstromanteile (z. B. Umgebungslicht) bereitsan dieser Stelle aus dem Signal entfernt. Der dritte Verstarker im Signalpfad hat eine digitalprogrammierbare Verstarkung (PGA), die aus Zweierpotenzen zwischen 20, ..., 26 ausgewahltwerden kann. Die letzte Stufe vor dem ADC ist ein Anti-Aliasing-Tiefpass, der durch eineneinfachen RC-Tiefpass erster Ordnung realisiert ist, da das Sensorsystem auf Uberabtastungausgelegt wurde. Die funf verstarkten Photodiodensignale werden mit der Referenzspannungvom Receiver auf das Mainboard gefuhrt, wo sie von dem ADC des Master-Controllers quan-tisiert werden. Anschließend werden die Signale in einer digitalen Signalverarbeitungsketteweiterverarbeitet, welche in Kapitel 5.2 genauer vorgestellt wird.
Abbildung 4.4: Analoge Signalkonditionierung vor der Quantisierung
4.2 Sensorparameter
Wie bereits in den Grundlagen dieser Arbeit beschrieben, sind die DFT und der (digitale) Lock-In-Verstarker stark miteinander verwandt und es gelten bei beiden die gleichen Voraussetzungen.
35

4 Analyse & Konzeption
Daher konnen durch die passende Wahl der Sensorparameter effektiv Leck-Effekte vermiedenund auf eine zusatzliche Fensterfunktion des Messfensters verzichtet werden. Die Sensorpa-rameter umfassen hierbei im Wesentlichen die Quantisierungsparameter (d. h. Abtastrate fsund Fenstergroße Nw) und die LED-Modulationsfrequenzen (fm). In den folgenden beidenAbschnitten wird die Wahl der Trager- bzw. Referenzsignalform theoretisch analysiert undanschließend Regeln aufgestellt, die einen (weitgehend) storungsfreien Betrieb gewahrleisten.
4.2.1 Trager- & Referenzsignale
Bei Lock-In-Verstarkern mussen das Tragersignal und das Referenzsignal im Allgemeinen nichtdie gleiche Signalform aufweisen. Dies gilt insbesondere fur digitale Implementationen, beidenen das Referenzsignal in Software abgelegt und somit nicht wie bei vielen analogen Variantendasselbe physikalische Signal wie das Tragersignal ist. Daher werden im Folgenden die Vor-und Nachteile der gangigsten zwei Elementarsignalformen (Sinus- bzw. Rechteckschwingung)diskutiert, die in Lock-In-Verstarkern zum Einsatz kommen.
Eine ideale Sinusschwingung besteht nur aus einer einzelnen Frequenzkomponente. Daher istdie Verwendung von Sinusschwingungen vorteilhaft, wenn gleichzeitig sehr viele verschiedeneTragersignale eingesetzt werden. Fur die sinusformige Modulation einer LED wird jedochi. d. R. eine aufwendige analoge Treiberstufe benotigt, die einen hinreichend sinusformigenStrom bereitstellen kann. Im Gegensatz dazu lasst sich eine naherungsweise rechteckformigeModulation des Stroms durch eine LED relativ einfach realisieren. Moderne LED-Treiber konneni. d. R. direkt von einem Rechtecksignal angesteuert werden und garantieren einen (einstellbaren)konstanten Strom im durchgeschalteten Zustand und zusatzliche Sicherheitsfunktionen (z. B.Uber- und Unterspannungsschutz) in platzsparender Bauform bei gunstigen Kosten.
Mithilfe der Fourieranalyse kann ein Rechtecksignal in seine Frequenzkomponenten zerlegtund genauer analysiert werden. Gleichung 4.1 zeigt hierzu die Fourierzerlegung einer idealen,symmetrischen Rechteckschwingung ohne Gleichanteil und der Amplitude 1.
xsquare[t] =4
π
(sin(2πft) +
1
3sin(3 · 2πft) +
1
5sin(5 · 2πft) + ...
)=
4
π
∞∑k=1
sin((2k − 1)2πft)
2k − 1
(4.1)
Anhand der Fourierzerlegung ist erkennbar, dass ein (ideales) Rechtecksignal aus den ungeradenVielfachen einer Grundfrequenz besteht, deren Amplitude mit steigender Frequenz abnimmt.Die Vielfachen einer Grundfrequenz werden auch Oberwellen oder Harmonische13 genannt undmussen bei der Frequenzauswahl berucksichtigt werden, damit es nicht zu Interferenzen zwischenden verschiedenen Tragersignalen kommt. Ebenfalls konnen diese Oberwellen Aliasing-Effekteverursachen, wenn der Anti-Aliasing-Filter sie vor der Quantisierung nicht hinreichend starkdampft. Interessant ist auch, dass die Energie der Hauptwelle großer ist als bei einem Sinussignalmit gleicher Amplitude im Zeitbereich (Faktor 4/π ≈ 1, 27). D. h. durch die Verwendung einerRechteckschwingung als Tragersignal ist der Messwert im idealen Fall fast 30% großer, selbstwenn nur die Hauptwelle demoduliert wird.
13engl.: harmonics
36

4 Analyse & Konzeption
Es gibt verschiedene Moglichkeiten wie Frequenzuberschneidungen der Tragersignale durchOberwellen behandelt werden konnen. Die einfachste besteht darin, die Uberlagerungen zuignorieren, was jedoch nur empfehlenswert ist, solange die Interferenzen ausschließlich zwischenden Oberwellen der verschiedenen Tragersignalen stattfinden und lediglich die Hauptwelledemoduliert wird. Sollen auch die Oberwellen demoduliert werden, gibt es grundsatzlich zweimogliche Vorgehensweisen. Die erste besteht darin, dass durch eine geschickte Frequenzauswahlsogar Interferenzen zwischen den Oberwellen der verschiedenen Tragersignale vermieden werden.Dann kann mit einem entsprechenden Referenzsignal die Energie der Haupt- und Oberwellenin einer Rechenoperation demoduliert werden. Eine andere (theoretische) Moglichkeit istdie rechnerische Trennung der Signalanteile, wofur jedoch sichergestellt sein muss, dass dieTragersignale zueinander in Phase sind, damit es bei den Uberlagerungen nicht zu destruktivenInterferenzen und somit zu Signalverlusten kommt. Ebenfalls mussen alle Haupt- und Oberwellender Tragersignale separat demoduliert werden und konnen somit nicht mit einem entsprechendenReferenzsignal auf einmal berechnet werden. Fur das Tragersignal mit der kleinsten Frequenzkann es zu keiner Interferenz auf dessen Hauptwelle kommen. Unter Berucksichtigung derFrequenzantwort des Receiverbandpasses ist es moglich, dessen Oberwellenanteile im restlichenSignal zu entfernen, da die Amplitude der Oberwellen abhangig von der Hauptwelle sind.Dies konnte rekursiv fur alle Tragersignale mit aufsteigender Frequenz durchgefuhrt werden,bis alle Signalanteile getrennt vorliegen. Eine solche aufwendige Losung wurde jedoch dieVerarbeitungszeit deutlich erhohen und ein zusatzlichen rechnerischen Fehleranteil im Ergebniserzeugen.
Durch die Demodulation der Oberwellen konnen weitere Probleme entstehen, welche insgesamtdie Signalqualitat beeinflussen. Damit die Oberwellen im Signal uberhaupt gut erkennbar sind,muss der Receiverbandpass deutlich breiter dimensioniert werden. Eine hohere Grenzfrequenz desAnti-Aliasing-Tiefpass erhoht jedoch auch die Gefahr von Aliasing-Effekten in dem Messsignalund kann nur durch eine hohere Filterordnung oder eine starkere Uberabtastung korrigiertwerden. Dies wurde wiederum den Hardware-Aufwand oder die benotigte Rechenzeit erhohen.Des Weiteren wird fur jede demodulierte Frequenzkomponente auch der Rauschanteil an dieserFrequenz demoduliert. Somit konnte sich selbst bei einer großeren absoluten Signalstarkeinsgesamt ein schlechteres Signal-Rausch-Verhaltnis ergeben.
Das in dieser Arbeit eingesetzte Sensorsystem verwendet Rechteckschwingungen als Tragersi-gnale, die weder untereinander noch mit dem Messsignal synchronisiert sind. Zusatzlich hatdas frequenzabhangige Verhalten des Sensorsystems sowie die Charakteristik des eingesetztenLED-Treibers gezeigt, dass nur ein relativ schmales Frequenzband sinnvoll nutzbar ist14. Daherwerden in den folgenden Kapiteln (Entwicklung der Signalverarbeitung und Evaluation desSensorsystems) einzelne Sinusschwingungen als Referenzsignale eingesetzt, wodurch nur dieHauptwelle der Tragersignale demoduliert wird. Dies erleichtert die Frequenzauswahl deutlich,da somit nur Interferenzen auf den Hauptwellen ausgeschlossen werden mussen.
4.2.2 Parameterauswahl
Das Messsignal wird durch einen Bandpass in der analogen Signalverarbeitung band-begrenzt.Daher sind die untere Grenzfrequenz des Hochpassfilters (fc,HPF) und die obere Grenzfre-quenz des Anti-Aliasing-Tiefpassfilters (fc,LPF) Kenngroßen, die bei der Parameter-Auswahl
14siehe Kapitel 6.1.1
37

4 Analyse & Konzeption
berucksichtigt werden mussen. Die Quantisierung des Messsignals wird durch die Abtastrateund die Fenstergroße beeinflusst. Bei Einsatz eines einfachen Anti-Aliasing-Tiefpasses ersterOrdnung, empfiehlt der Mikrocontroller-Hersteller eine Abtastrate, die zwei- bis funfmal sohoch wie die Grenzfrequenz des Anti-Aliasing-Tiefpasses ist [STM13]. Diese Empfehlung isteigentlich nicht ausreichend, da bei einer doppelten Abtastrate die Nyquistrate genau deroberen Grenzfrequenz entsprechen wurde. Daher sollte die Abtastrate mehr als doppelt so hochwie die obere Grenzfrequenz sein.
fs = n · fc,LPF, n ∈ (2, 5] (4.2)
Einer der wichtigsten Systemparameter ist die diskrete Frequenzauflosung ∆f , welche sichaus dem Quotienten der Abtastrate und der Fenstergroße berechnen lasst15. Weiterhin ist derKehrwert der Frequenzauflosung die Zeit tw, die zum Befullen eines kompletten Messfenstersbenotigt wird. Da der Sensor in einem Sicherheitsumfeld eingesetzt wird, sollte diese Zeitmoglichst kurz ausfallen, um bei der Erkennung von Haut noch hinreichend Zeit fur einenachfolgende Sicherheitsfunktion zu haben. Die Fenstergroße hingegen bestimmt die Anzahlder Messwerte im Messfenster und somit auch direkt die benotigte Rechenzeit fur die digitaleSignalverarbeitung. Daher muss durch geschickte Wahl von Abtastrate und Fenstergroße einKompromiss zwischen Rechenzeit und Frequenzauflosung eingegangen werden. In der restlichenArbeit wird eine Messzeit von 1 ms festgelegt, was zu einer diskreten Frequenzauflosung von1 kHz fuhrt.
tw = 1 ms⇔ ∆f = 1 kHz (4.3)
Fur eine korrekte Berechnung ohne Leck-Effekte muss sichergestellt werden, dass die Tragersi-gnale in dem Messfenster eine ganzzahlige Anzahl von Perioden haben. Diese Voraussetzunglasst sich sehr einfach realisieren, indem die Modulationsfrequenzen ganzzahlige Vielfacheder diskreten Frequenzauflosung sind. Dadurch liegen die Haupt- und die Oberwellen derrechteckformigen Tragersignale exakt auf den diskreten Frequenzschritten, was gleichbedeutenddazu ist, dass sie im Zeitbereich eine ganzzahlige Anzahl von Perioden im Messfenster haben.
fm = k ·∆f, k ∈ N \ {0} (4.4)
Weiterhin sollten die Modulationsfrequenzen innerhalb der Grenzfrequenzen des Bandpassesmit hinreichend Abstand zueinander liegen. Wenn zwischen zwei Nutzfrequenzen mindestenseine unbenutzte Frequenz liegt, dann lassen sich mogliche Leck-Effekte sehr einfach feststellen.
fc,HPF < fm < fc,LPF ∧ |fmi− fmj
| ≥ 2 ·∆f (4.5)
Ebenfalls sollte bei der Frequenzauswahl das frequenzabhangige Verhalten des Sensorsystemsberucksichtigt werden, um eine moglichst geringe Dampfung der Signale zu erreichen. Wennalle Modulationsfrequenzen nebeneinander und unterhalb der ersten Harmonischen platziertwerden, dann kann leicht die Anzahl der freien Nutzfrequenzen anhand der kleinsten gewahltenModulationsfrequenz abgeschatzt werden.
15siehe Gleichung 3.10 in Kapitel 3.2.3
38

4 Analyse & Konzeption
4.3 Beherrschung ungunstiger Messbedingungen
In diesen Abschnitt werden einige ungunstigen Messbedingungen beschrieben und moglicheMaßnahmen zur Behandlung dieser vorgestellt, um Fehlklassifizierungen zu vermeiden. Wiebereits in Kapitel 3.4.2 beschrieben, konnen Fehlklassifizierungen entweder die Sicherheit oderdie Verfugbarkeit verringern und sollten daher moglichst verhindert werden. Hierbei mussoftmals ein Kompromiss zwischen diesen beiden gegensatzlichen Sicherheitszielen eingegangenwerden.
4.3.1 Unpassende Signalstarke
Die Amplitude des Messsignals kann je nach Material und Messabstand sehr starken Schwankun-gen unterliegen. Gemaß dem Abstandsgesetz fur Energiegroßen16, verteilt sich die ausgestrahlteelektromagnetische Strahlung auf (einem Ausschnitt) einer Kugeloberflache, welche propor-tional mit dem Quadrat des Abstandes großer wird. Daher nimmt die Strahlungsintensitat(d. h. die Leistung pro Flache) quadratisch mit dem Abstand ab. Zusatzlich gibt es verschiede-ne Materialien, welche die NIR-Strahlung stark absorbieren oder reflektieren. Daher kann esvorkommen, dass eine zu hohe oder zu geringe Signalstarke aus einer unpassenden analogenVerstarkung resultiert. Bei einer zu geringen Signalstarke besteht die Gefahr, dass das Messsi-gnal im Grundrauschen des Sensorsystems untergeht, wohingegen eine zu starke Signalstarkeeine Ubersteuerung17 im analogen Signalpfad erzeugt. Durch ein ubersteuertes Signal konnendie Verstarker im analogen Signalpfad in die Sattigung gehen, was zu einem abgeschnittenenSignalverlauf fuhrt. Dieser Effekt ist als Clipping18 bekannt und erzeugt im Signal nicht-lineareVerzerrungen.
Eine unpassende Signalstarke kann durch eine adaptive Verstarkung in der analogen Signal-verarbeitung adressiert werden. Daher befindet sich auf dem Receiver des Sensorsystems einPGA, wodurch sich der Dynamikbereich der Messsignale deutlich erweitert. Beim Einstellen derPGA-Verstarkung sollte kein einzelner Schwellwert definiert, sondern eine Hysterese verwendetwerden, um schnelle Schaltvorgange aufgrund von Rauschen zu verhindern. Da in dem einge-setzten Sensorsystem das Messsignal um eine positive Referenzspannung oszilliert, muss dieseSpannung als virtueller Nullpunkt bei der Einstellung der Hysterese-Schwellwerte herangezogenwerden. In jedem vollen Messfenster wird der maximale Messwert gesucht, welcher mit denSchwellwerten verglichen wird, um entweder die Verstarkung nach oben oder nach unten zukorrigieren. Nach Anpassung der Verstarkung ist es empfehlenswert, die aktuelle Messung zuverwerfen, da prinzipiell ein zu schwaches Signal oder eine Ubersteuerung nicht ausgeschlossenwerden kann. Durch die adaptive Verstarkung ergeben sich drei Zustande:
Messsignalstarke im vorhergesehen BereichEntspricht dem normalen vorgesehenen Betrieb. Die Signalverarbeitungskette inkl. Mate-rialerkennung wird wie geplant ausgefuhrt.
Messsignal zu schwach und Verstarkung maximalSehr starke Absorption der Tragersignale, zu große Messdistanz oder kein Messobjekt.Da das Materialklassifikationsergebnis nun im Wesentlichen vom Rauschen beeinflusst
16auch bekannt als 1/r2-Gesetz17engl.: overdrive18von engl. to clip
39

4 Analyse & Konzeption
wird, sollte die Signalverarbeitung nicht ausgefuhrt werden, um die Verfugbarkeit nichtunnotig zu verringern.
Messsignal zu stark und Verstarkung minimalEs besteht tendenziell die Gefahr von Ubersteuerungen und Fehlklassifikationen. Da dasSensorsystem fur die Unterscheidung bestimmter Materialien ausgelegt ist, kann dieserFall nur bei einer zu geringen Messdistanz oder (unbekannten) stark reflektierendenMaterialien auftreten. Je nach Einsatzzweck des Sensors ist an dieser Stelle zu entscheiden,ob die Sicherheitsfunktion ausgelost wird oder nicht. Bei hohen Sicherheitsanforderungenist die Ausfuhrung der Sicherheitsfunktion empfehlenswert, da eine Beeintrachtigung derMaterialerkennung nicht auszuschließen ist.
Damit die Ergebnisse der Evaluation ubertragbar auf den Produktprototypen bleiben, werdendie gleichen Hysteresegrenzwerte eingesetzt, die derzeit etwa bei 16% bzw. 95% der maximalen(analogen) Auslenkung liegen.
4.3.2 Partielles Messfenster
Fur die frequenzbasierte Signalverarbeitung wird wahrend der Datenakquise ein Messfenstermit Messwerten bei aquidistanten Zeitabstanden gefullt. Wahrend des Befullens konnte esvorkommen, dass sich ein Messobjekt in den Messpunkt hinein oder heraus bewegt. Somit wurdedas Messfenster nur partiell aus Messwerten eines Messobjektes bestehen. Veroffentlichungenzu vergleichbaren Sensorsystemen (z. B. [Hin+13]) stellen daher die Bedingung, dass sich dasMessobjekt und somit die Signalamplitude wahrend der Datenakquise nicht verandern.
Beurteilung aus Sicht der Sicherheit
Durch eine geforderte Messfrequenz kann erreicht werden, dass es immer mindestens einkomplettes Messfenster des gleichen Messobjektes gibt und somit die Materialerkennunggewahrleistet werden kann. Eine minimal benotigte Messfrequenz kann aus den Dimensionenund Geschwindigkeiten der menschlichen Hand abgeleitet werden, da fur eine Fingersicherheitdas Sensorsystem imstande sein muss, den schmalsten Finger bei der schnellsten angenommenenHandbewegung zu erkennen. Werte fur die anzunehmende minimale Breite eines menschlichenFingers (∅f ) und der anzunehmenden Geschwindigkeit einer menschlichen Hand (vmax) lassensich aus den Normen DIN 33402-2 bzw. DIN EN ISO 13855 entnehmen. Aufgrund des festenoptischen Aufbaus variiert die Messpunktgroße (∅m) je nach Abstand. Der Messpunkt solltejedoch eine Breite von 8 mm bei dem maximal vorgesehen Messabstand nicht uberschreiten19.Mit diesen Informationen kann die minimal benotigte Messfrequenz uber folgende Gleichungermittelt werden:
fmin =vmax
∅f −∅m
=2000 mm s−1
11 mm− 8 mm≈ 666 Hz (4.6)
[33405, Tabelle 39] [13810, Abschnitt 6.2.3.1] [Sch13]
In der vorgesehenen Konfiguration benotigt das Sensorsystem 1 ms, um ein Messfenster komplettmit Messwerten zu fullen. Durch die Nutzung der DMA20-Funktionalitaten des Mikrocontrollers
19Herstellerangabe20direct memory access
40

4 Analyse & Konzeption
wird erst CPU-Zeit bei einem vollen Messfenster benotigt. Dies ermoglicht eine effizienteNutzung der Ressourcen, indem die Akquise und die Verarbeitung der Messdaten paralleldurchgefuhrt werden kann. Somit hat das Sensorsystem eine Messfrequenz von insgesamt 1 kHz,wobei die Reaktionsgeschwindigkeit etwas langsamer ist, da noch die Zeit der Signalverarbeitungdazu gerechnet werden muss.
Erhohung der Verfugbarkeit
Im vergangenen Abschnitt wurde gezeigt, dass partielle Messfenster aus Sicht der Sicherheitkeinen Einfluss haben. Sie konnten aber dennoch die Verfugbarkeit des Sensorsystem durchFehlklassifizierungen (in die sichere Richtung) verringern. Daher soll in diesem Abschnittdie Frage beantwortet werden, ob es moglich ist, ein partielles Messfenster algorithmisch zuerkennen.
Aufgrund der hohen Messfrequenz des Sensorsystems ist es quasi unmoglich, systematisch einpartielles Messfenster mit realen Sensordaten zu generieren. Daher wurde mit MATLAB® eineSimulation durchfuhrt, um dennoch eine Antwort auf diese Frage zu erhalten. Als Tragersignalewurden hierbei Sinusschwingungen verwendet, da das Vorhandensein von zusatzlichen Ober-wellen durch Rechteckschwingungen an den Prinzipien grundsatzlich nichts andert. Es wurdenzwei verschiedene Versuche durchgefuhrt: Bei einem wurde die Amplitude der Tragersignalesprunghaft verandert und bei dem anderen nimmt die Amplitude exponentiell ab. Die Ergebnisseder Simulation sind in der Abbildung 4.5 zusammengefasst.
-2
-1
0
1
2
0 0.2 0.4 0.6 0.8 1
Val
ue
Time (ms)
0
0.2
0.4
0.6
0.8
1
0 10 20 30 40 50
Mag
nitude
Frequency (kHz)
(a) Kein partielles Fenster
-2
-1
0
1
2
0 0.2 0.4 0.6 0.8 1
Val
ue
Time (ms)
0
0.2
0.4
0.6
0.8
1
0 10 20 30 40 50
Mag
nitude
Frequency (kHz)
(b) Sprunghafte Anderung
-2
-1
0
1
2
0 0.2 0.4 0.6 0.8 1
Val
ue
Time (ms)
0
0.2
0.4
0.6
0.8
1
0 10 20 30 40 50
Mag
nitude
Frequency (kHz)
(c) Exponentielle Anderung
Abbildung 4.5: MATLAB®-Simulation: Partielles Messfenster(fs = 100 kHz, Nw = 100, fmi = 10 kHz, 15 kHz, 20 kHz)
Anhand der Simulation ist deutlich zu erkennen, dass ein partielles Messfenster Leck-Effekteverursacht. Dies ist ein zu erwartendes Ergebnis, da durch das Verandern der Amplitude
41

4 Analyse & Konzeption
innerhalb des Messfensters eine wichtige Bedingung fur die korrekte Funktion der DFT verletztwird: Beim Verbinden der Anfangs- und Endpunkte der Kurve entstehen Sprungstellen unddas Messsignal ist nicht mehr periodisch. Somit kann ein partielles Messfenster sehr einfachfestgestellt werden, indem die Frequenzen direkt neben den Modulationsfrequenzen uberpruftwerden. Befindet sich dort ein deutlich messbarer Signalanteil, dann ist die Wahrscheinlichkeiteines partiellen Messfensters sehr hoch.
4.3.3 Externe optische Storsignale
Jedes optische System konnte durch unerwunschte Fremdstrahlung in seiner Funktion be-eintrachtigt werden, wobei sich jedoch Messungen im Frequenzbereich tendenziell robustergegenuber optischen Storsignalen verhalten. Dennoch ist es vorstellbar, dass eine externe opti-sche Storquelle (z. B. ein vergleichbares Sensorsystem) ein moduliertes Signal erzeugt und somitdas Messergebnis verfalscht. Die Auswirkungen eines solchen Storsignals sind hauptsachlichvon dessen Signalstarke und Modulationsfrequenz abhangig.
Eine hohe Signalstarke des Storsignals kann zu einer Ubersteuerung im Zeitbereich fuhren,da durch die Uberlagerung die Amplitude des resultierenden Signals großer ist als bei denEinzelsignalen. Deshalb sollte die minimale Verstarkung der analogen Signalverarbeitung dement-sprechend angepasst sein, wenn mit Storsignalen im Betrieb zu rechnen ist.
Die Modulationsfrequenz des Storsignals kann zwischen oder auf der diskreten Frequenz-auflosung liegen. Wenn die Frequenz dazwischen liegt, verursacht das Storsignal leicht zuerkennende Leck-Effekte. Befindet sich die Frequenz auf den diskreten Frequenzschritten undes gibt keine Uberschneidungen zwischen den Tragersignal- und Storsignalfrequenzen, dannsollte das keinen Einfluss auf die Funktion des Sensorsystem haben, insofern das Signal im Zeit-bereich nicht ubersteuert. Im Gegensatz dazu kann die Funktion leicht beeintrachtigt werden,wenn zwischen Trager- und Storsignal Interferenzen auftreten. Bekannte Verfahren aus derNetzwerktechnik (z. B. CSMA/CD) haben eine Erwartungshaltung an die Signalamplitude undkonnen daher eine unerwunschte Uberlagerung durch zu große Amplituden erkennen. Da jedochdie Remissionsinformation in der (gedampften) Tragersignal-Amplitude enthalten ist und keinezusatzlichen Informationen zu dem Messobjekt vorliegen, ist eine solche Signaluberlagerunggrundsatzlich nicht im normalen Betrieb erkennbar.
Die einzige Moglichkeit ein solches Storsignal festzustellen und ggf. die Funktion des Sensorsys-tems aufrecht zu erhalten, ist, das gestorte Tragersignal auf eine andere Frequenz einzustellen.Dies konnte periodisch in den Selbsttests durchgefuhrt werden, um auf zufallige Storsignalezeitnah und adaptiv reagieren zu konnen. Hierbei sind verschiedene Strategien denkbar, vondenen im Folgenden drei vorgestellt werden.
Ausschalten und PrufenDie Tragersignale konnten fur mindestens ein Messfenster komplett ausgeschaltet werden,um eine Prufung auf etwaige Storsignale in der Umgebung vorzunehmen. Wahrend desausgeschalteten Zustand ist jedoch die Sicherheitsfunktion deaktiviert. Ein Vorteil dieserVariante ist, dass keine weiteren Frequenzen wahrend den Selbsttests belegt werden.
Doppelte FrequenzkonfigurationDas Sensorsystem halt zwei komplette Frequenzkonfigurationen bereit und kann zwischendiesen Beiden wechseln. Wahrend eine Konfiguration verwendet wird, kann die andere
42

4 Analyse & Konzeption
auf Storungen uberpruft werden. Dadurch kann die Funktion auch wahrend des Selbst-tests aufrecht erhalten bleiben. Allerdings werden bei dieser Strategie doppelt so vieleFrequenzen wie verwendete Tragersignale benotigt.
ReservefrequenzenNeben der normalen Frequenzkonfiguration konnen einige zusatzliche Reservefrequen-zen eingesetzt werden, um einzelne Tragersignale auf andere Frequenzen einstellen zukonnen. Somit wird eine Aufrechterhaltung der Funktion ermoglicht, wahrend jedocheine Erkennung von Storungen ggf. langer dauert. Dies stellt einen Kompromiss zwischenbenotigten Frequenzen und Reaktionsgeschwindigkeit dar.
43


5 Entwicklung
5.1 Basis-Software
Im Rahmen dieser Arbeit wurde ein umfangreiches Software-Paket entwickelt, welches sichgrundsatzlich in drei Bereiche aufteilt: In eine plattformunabhangige C-Bibliothek fur gemeinsamgenutzte Codebestandteile, die Embedded-Software des Sensorsystems und eine grafische PC-Software zur Steuerung und Evaluation. Die folgenden Abschnitte beschreiben die wesentlichenAspekte der verschiedenen Bestandteile, welche fur die grundlegende Funktion und Evaluationdes Sensorsystems benotigt wurden. Im digitalen Anhang dieser Arbeit ist der kompletteQuelltext zu finden.
5.1.1 C-Bibliothek (libLoki)
In der C-Bibliothek sind die plattformunabhangigen Codebestandteile gekapselt. Neben einerKomponente fur die Kommunikation zwischen PC und den beiden Mikrocontroller ist auch diekomplette digitale Signalverarbeitungskette enthalten. Aufgrund des besonderen Stellenwertesder Signalverarbeitung in dieser Arbeit, wird diese im Kapitel 5.2 naher beschrieben.
Zur Kommunikation zwischen den verschiedenen Parteien wurden verschiedene Datenstrukturendefiniert. Dies hat den Vorteil, dass alle Kommunikationspartner genau uber die Lange und denAufbau der ankommenden Daten informiert und diese nur an einer Stelle im Quelltext definiertsind. Folgende Strukturen wurden verwendet:
InfoEnthalt allgemeine Systeminformationen: z. B. die Software-Version, Laufzeit des Systems(Uptime), Fehlerkennzeichen (Errorflags), und Informationen der Selbsttests.
SensorkonfigurationEnthalt die Sensorkonfiguration: z. B. Operationsmodus (PC- oder Stand-Alone-Betrieb),Abtastrate, Fenstergroße, LED-Konfiguration (Frequenzen, An/Aus) und PGA-Konfiguration.
NachrichtAtomare Kommunikationseinheit zwischen Master- und Slave-Controller. Besteht auseinem Header (Kommandobyte und CRC-Prufsumme) und einem Datenteil. Hat insgesamteine feste Lange, wobei der Datenteil so dimensioniert ist, dass er gerade die LED-Konfiguration aufnehmen kann.
PaketAtomare Kommunikationseinheit zwischen PC und Master-Controller. Besteht aus einemHeader mit fester Lange (Startbyte, Kommandobyte, Lange des Datenteils und CRC-
45

5 Entwicklung
Prufsumme) und einem Datenteil mit variabler Lange. Der Datenteil kann wiederum dieanderen Strukturen oder die rohen Messdaten beinhalten.
Bei jedem Kommunikationsvorgang wird immer ein komplettes Paket oder eine kompletteNachricht ubertragen. Durch die CRC-Prufsumme konnen Ubertragungsfehler festgestellt unddurch die feste Struktur der ankommende Datenstrom wieder synchronisiert werden. Damitdie Kommunikationspartner das gleiche CRC-Polynom verwenden, sind in der Bibliothek CRC-Implementationen fur die Kommunikationsstrukturen enthalten.
5.1.2 Embedded-Software
Die Software der beiden Mikrocontroller wurde in C implementiert. Fur die Entwicklungwurde die IAR Embedded Workbench® fur ARM® von IAR Systems eingesetzt, die ein vomTUV Sud zertifiziertes Tool fur die Entwicklung von sicherheitsrelevanten Anwendungen ist1.Die Architektur der Software weist mehrere Abstraktionsschichten auf (siehe Abbildung 5.1).Das von STM bereitgestellte Treiberpaket enthalt die ARM® CMSIS2-Treiber, welche dieunterste Ebene darstellen und eine herstellerunabhangige Hardwareabstraktionsschicht furARM® Cortex® Mikrocontroller sind. Darauf aufbauend sind die STM-HAL3-Treiber unddie STM-USB-Middleware. Diese zusatzliche Ebene bietet eine einheitliche Schnittstelle furalle STM-Mikrocontroller. Wahrend die Initialisierung und die Verwendung der Controller-Peripherie durch die STM-HAL-Treiber vereinfacht wird, steigt der Software-Overhead, wasdie Laufzeit und mogliche Fehlerquellen im Quelltext erhohen kann. Zwischen der eigentlichenSensorapplikation und dem STM-Treiberpaket sind einige eigene Treiber angesiedelt, die inkompakter Form alle benotigten Funktionalitaten bereitstellen.
STM32F405VGT (Master)
STM Hardware Abstraction Layer Driver
ARM CMSIS Driver
STM Driver
STM USB Middleware
Slave ApplicationModules
Master ApplicationModules
Hardware
Sensor Application
STM32F051K6T (Slave)
Slave Driver Interface(e.g. PWM(Timer), UART)
Master Driver Interface (e.g. ADC/DMA, UART, CDC)
Abbildung 5.1: Architektur der Embedded Software
Die beiden Mikrocontroller kommunizieren uber eine serielle Schnittstelle (UART) und teilensich daher das Modul, das diese Kommunikation handhabt. Durch die feste Nachrichten-Langewird eine einfache Verwendung von DMA fur den Datenaustausch ermoglicht, sodass erst
1zertifiziert nach IEC 61508 und ISO 262622Cortex Microcontroller Software Interface Standard3Hardware Abstraction Layer
46

5 Entwicklung
CPU-Zeit benotigt wird, wenn eine komplette Nachricht empfangen wurde. Die Kommunikati-on folgt hierbei einer Master-Slave-Architektur, die der Master-Controller initiieren und derSlave-Controller nach jeder Nachricht bestatigen muss. Fur diese Arbeit ist insbesondere dieUbertragung der LED-Konfigurationen wichtig. Periodische Diagnose-Nachrichten (Erreichbar-keit und Ergebnisse der Selbsttests) sind vorgesehen und wurden implementiert, sind jedoch inder aktuellen Firmware deaktiviert, da sie fur die Evaluation nicht benotigt werden.
Master-Controller
Der Master-Controller kommuniziert mit dem PC uber eine USB-Schnittstelle4. Die Kom-munikation wird uber einen Zustandsautomaten gesteuert, dessen Aufgabe es ist, Kommu-nikationspakete mit der Desktop-Software auszutauschen und Kommunikationsfehler (z. B.Timeout- oder CRC-Fehler) zu melden. Die meisten Kommunikationsvorgange werden vondem Empfanger nicht quittiert, um den kontinuierlichen Messdatenstrom nicht unnotig zuunterbrechen. Nur bei manchen speziellen Nachrichten (wie z. B. Konfigurationswechsel) wirdeine Empfangsbestatigung erwartet.
Eine der wichtigsten Aufgaben des Master-Controllers ist die korrekte Quantisierung des Mess-signals mit den eingestellten Quantisierungsparametern. Hierfur werden die drei internen ADCsparallel betrieben und schreiben in einen gemeinsamen DMA-Puffer. Mit einem internen Timerwird die Quantisierung getriggert. Der Timer muss doppelt so schnell wie die eingestellteAbtastrate auslosen, da jeder der ADCs zwei Kanale verwendet (funf Photodioden + Referenz-spannung), die sequentiell quantisiert werden mussen. Wenn die Anzahl der Messwerte proKanal die eingestellte Fenstergroße erreicht, wird ein Interrupt ausgelost, damit die Messwertedirekt weiterverarbeitet werden konnen.
Um die Ressourcen des Controllers effizient auszunutzen, wurde ein Speicherhandling implemen-tiert. Ein voller DMA-Puffer wird schnellstmoglich in einen von mehreren Verarbeitungspuffernkopiert, damit die Quantisierung zeitnah wieder gestartet werden kann. So kann ein vollesMessfenster von der Signalverarbeitung verarbeitet oder uber USB versendet werden, wahrendbereits ein neues Fenster gefullt wird. Im spateren Verlauf der Entwicklung hat sich herausge-stellt, dass die USB-Verbindung ein Engpass darstellt und die Messwerte nur mit gedrosselterGeschwindigkeit an den PC ubertragen werden konnten. Aktuell erhaltliche USB-Isolatorenhaben typischerweise eine begrenzte Ubertragungsgeschwindigkeit von 12 Mbit/s5. Zusatz-lich ist ein Großteil der USB-Implementation in Software realisiert, wodurch ein effizienterDMA-Einsatz unmoglich wird. Dennoch kann durch das Speicherhandling eine Korrektheit derMesswerte garantiert werden.
Damit die Sensorkonfiguration und -kalibration zur Laufzeit ausgetauscht werden kann undbei einem Systemstart wieder verfugbar ist, wurde der interne Flash-Speicher mit einer ange-passten Linker-Konfigurationsdatei aufgeteilt [IAR09, S. 297ff]. Es wurden ganze Seiten desProgrammspeichers abgetrennt, da Flash-Speicher vor jedem Schreibzugriff geloscht werdenmussen. Neben der Sensorkonfiguration und -kalibration wurde ein persistenter Fehlerspeichervorgesehen, um etwaige Hardwarefehler mit einem Zeitstempel protokollieren zu konnen. Da
4USB communication device class (CDC) - virtueller COM-Port5entspricht USB 1.0 (Full Speed)
47

5 Entwicklung
Flash-Speicher eine begrenzte Anzahl Losch-/Schreibzyklen6 hat, sollten die Schreibzugriffe soselten wie moglich durchgefuhrt werden.
Slave-Controller
Der Slave-Controller ist fur die Erzeugung der Tragersignale und die Durchfuhrung einigerSelbsttests verantwortlich. Hinreichend prazise Rechteckschwingungen konnen uber die inte-grierten Timer erzeugt werden. Hierzu werden die Timer im PWM-Modus mit einem festenTastverhaltnis7 von 50% betrieben. Fur jedes der Tragersignale wird ein separater Timer ver-wendet, die untereinander nicht synchronisiert sind. Daher existiert immer eine (unbekannte)Phasenverschiebung zwischen den Tragersignalen.
Der interne ADC des Controllers wird fur die Selbsttests verwendet und uber DMA ausge-lesen. Die Versorgungsspannungen, die LED-Spannungsabfalle und die interne Temperaturwerden in periodischen Abstanden gemessen. Bei starken Abweichungen zu hinterlegten Schwell-werten ist die Wahrscheinlichkeit eines Hardwarefehlers (z. B. defekte LEDs) hoch und dieSicherheitsfunktion wird ausgelost.
5.1.3 Desktop-Software
Fur die grafische Desktop Software wurde das Qt-Framework8 eingesetzt. Qt ist eine C++-Klassenbibliothek fur die plattformubergreifende Entwicklung von grafischen Oberflachen. Diefolgenden Anforderungen wurden an die Software gestellt:
Kommunikation mit dem SensorsystemEine der Basis-Anforderungen ist die Kommunikation mit dem Master-Controller imSensorsystem uber eine (virtuelle) serielle Schnittstelle. Hierfur lauft im Hintergrund derDesktop-Software ein vergleichbarer Zustandsautomat wie in der Embedded-Software.
Anzeige/Konfiguration der SensorfunktionenAlle Sensorkonfigurationsparameter konnen angezeigt bzw. eingestellt werden. Somitist es moglich, Konfigurationen zu Evaluationszwecken schnell auszutauschen. Ebenfallskonnen die Sensormessungen kontrolliert werden (Start/Stop/Anzahl).
Kontrolle eines LinearantriebesFur die Evaluation des Sensorsystems mussen Messungen bei verschiedenen Messdistanzendurchgefuhrt werden. Hierzu wird ein Linearantrieb verwendet, mit dem eine prazisePositionierung der Messobjekte auf verschiedene Distanzen ermoglicht wird.
Visualisierungen der SensormessungenEs wurden verschiedene Visualisierungen implementiert, um das Sensorsystem zu analysie-ren. Hierbei konnte auf die Qwt9-Bibliothek fur die grafischen Elemente zuruckgegriffenwerden. Alle Visualisierungen sind dabei so ausgelegt, dass eine Echtzeitbetrachtungmoglich ist. Insgesamt lassen sich die verschiedenen Visualisierungen in folgende Katego-rien unterteilen:
6Herstellerangabe: Mindestens 10000 Losch-/Schreibzyklen pro Flash-Seite7engl.: duty cycle8www.qt.io9Qt Widgets for Technical Applications
48

5 Entwicklung
� Nicht-grafische Darstellung in Textform der Meta-Informationen (z. B. Material,Zeitstempel), der rohen Messdaten und der kompletten Signalverarbeitungskette
� Darstellung der rohen Messdaten, des Referenzsignals, sowie der Inphase- undQuadratur-Signale im Zeitbereich bzw. Frequenzbereich
� Darstellung der Sensorkalibration, des Lock-In-Verstarkers und der Materialklasse
Fur die Berechnung der DFT in den Visualisierungen wird die FFT-Bibliothek FFTW[Fri+05] verwendet, die als freie Software verfugbar ist.
Verarbeiten von SensormessungenFur die spatere Evaluation des Sensorsystems mussen hinreichend viele Messdatenerzeugt werden. Ein Kollektor ermoglicht das Sammeln der Messungen, um sie bei Bedarfnicht nur zu visualisieren, sondern auch fur die spatere Weiterverarbeitung und Analyseabzuspeichern.
Im Anhang dieser Arbeit10 finden sich einige Screenshots der Desktop-Software und einedetailliertere Beschreibung der Funktionalitaten.
5.2 Signalverarbeitungskette
Das Sensorsystem hat eine endliche Anzahl von LEDs, die alle schmalbandige elektromagneti-sche Strahlung einer bestimmten Wellenlange emittieren (wl ∈WL). Jede dieser Wellenlangenwird mit einer bestimmten Frequenz moduliert angesteuert (f ∈ F). Eine SystemkonfigurationC weist somit eindeutig einer Wellenlange eine Frequenz zu (C ⊂ WL × F, C : WL → F).Jede der Photodioden empfangt ein Mischsignal aus den gedampften (amplitudenmodulier-ten) Tragersignalen und erzeugt ein eigenes Messsignal (m). Daher wird im Folgenden dieSignalverarbeitungskette, exemplarisch und ohne Beschrankung der Gultigkeit fur die anderenPhotodioden, anhand eines Messsignals beschrieben.
In dem ADC-Puffer (adc) liegen Nw Messwerte, die mit einer festen Abtastrate (fs) quantisiertwurden. Diese Messwerte sind alle positiv, da eine positive Referenzspannung Vref genutzt wird,um auf negative Spannungen im Sensorsystem verzichten zu konnen. Um ein Signal zu erhalten,was um den Nullpunkt oszilliert, muss diese Referenzspannung von allen Messwerten subtrahiertwerden. Hierbei ist es nicht ausschlaggebend, ob die Referenzspannung ebenfalls mit demADC gemessen oder als Konstante in der Software hinterlegt wird. Eine zusatzlicher (inverser)Faktor bildet die verschiedenen PGA-Verstarkungsstufen auf den gleichen Spannungsbereichab, wodurch Sprungstellen zwischen Messungen bei leichten Distanzunterschieden aufgrundeiner Veranderung des Verstarkungsfaktors verhindert werden.
m[i] = (adc[i]− Vref ) ·PGAmax
PGAcurrent, fur 0 ≤ i ≤ Nw − 1 (5.1)
Die Signalverarbeitungskette ist insgesamt in funf sequentielle Schritte aufgeteilt. Abbildung5.2 zeigt einen Uberblick und die Reihenfolge der einzelnen Vorgange, welche in den folgendenAbschnitten naher erlautert werden.
10siehe Kapitel A.3
49

5 Entwicklung
Pre-processing
MultirateDecimation
(optional)
Signal-detection
Lock-In-Amplifier
Post-processing
Feature extraction
Quotients /Differences /Signature /
HSV
Material classification
Sensor-Calibration
J48-Decision-Tree
Abbildung 5.2: Blockschaltbild der Signalverarbeitung
5.2.1 Vorverarbeitung
Das Sensorsystem verwendet einen einfachen Anti-Aliasing-Filter und ist daher auf eine Ube-rabtastung ausgelegt, wodurch relativ große Datenmengen entstehen konnen. Mit einem(optionalen) Schritt kann die Datenmenge reduziert und nicht benotigte Frequenzinformatio-nen entfernt werden. Zuerst wird eine neue Abtastrate definiert, die im einfachsten Fall einganzzahliger Teiler der alten Abtastrate ist.
fs,new =fsk, k ∈ N \ {0}
Nw,new =Nw
k, k ∈ N \ {0}
(5.2)
Anschließend mussen mit einem digitalen Tiefpass alle Frequenzen entfernt werden, die großeroder gleich der neuen Abtastrate sind. In dieser Arbeit wurde auf eine frei verfugbare Imple-mentation11 zuruckgegriffen, die einem IIR-Filter vierter Ordnung in Direkt-Form II entspricht.Nach der Tiefpassfilterung kann die eigentliche Dezimierung stattfinden, die durch einfachesAuslassen von Messpunkten realisiert wird.
mfiltered = IIR(mraw)
mnew[i] = mfiltered[i · k], 0 ≤ i ≤ Nw,new − 1(5.3)
Diese Vorverarbeitung wird als optional angesehen, da nur die Datenmenge reduziert und nichtdie Signalqualitat verbessert wird. Dennoch ist diese Technik interessant, wenn es darum geht,die Messdaten zu ubertragen und abzuspeichern.
Problematisch an dem Einsatz von (kausalen) digitalen Filtern ist, dass sie fur die Berechnungder ersten Ausgangssignalpunkte auf keine Werte zuruckgreifen konnen. Typischerweise werdendaher diese Werte mit Nullen initialisiert, was jedoch in einem Einschwingverhalten resultierenkann und die Signalqualitat negativ beeinflusst. In dem Sensorsystem kann durch eine passendeWahl von Parametern gesichert werden, dass eine ganzzahlige Anzahl von Perioden der Tragersi-gnale im Eingangssignal enthalten sind. Daher werden in einer modifizierten Filtervariante einigeder Messwerte am Ende des Messfensters an den Anfang gespiegelt und nach der Filterungwieder entfernt. Durch diese Maßnahme kann das Einschwingverhalten des Filters kompensiertwerden.
11Generiert auf: http://www.micromodeler.com/dsp/ (Stand: 03.08.2016)
50

5 Entwicklung
5.2.2 Signaldetektion (Lock-In-Verstarker)
Die benotigten Informationen werden aus dem Messsignal mit einem digitalem Lock-In-Verstarkerextrahiert, der als Eingangsgroßen das Messsignal (m) und die Referenzsignale erhalt. In dieserArbeit werden einfache Sinusschwingungen als Referenzen verwendet und bei der Erzeugungmuss die Abtastrate der Messsignale berucksichtigt werden. Fur jede Frequenz von Interesse(Fsystem), z. B. die Tragersignal- und die Reservefrequenzen, muss ein Referenzsignalpaar12 (rfund rf,90°) erzeugt werden. Um Rechenaufwand zu sparen, werden bei der Initialisierung desLock-In-Verstarkers die Referenzsignale erzeugt und im Arbeitsspeicher fur zukunftige Zugriffeabgelegt.
rf [i] = A cos(2πif
fs), fur f ∈ Fsystem, 0 ≤ i ≤ Nw − 1
rf,90°[i] = A sin(2πif
fs), fur f ∈ Fsystem, 0 ≤ i ≤ Nw − 1
(5.4)
Das Referenzsignal kann mit einem zusatzlichen Faktor A skaliert werden. Wenn der demodu-lierte Wert der Amplitude im Zeitbereich entsprechen soll, dann muss A = 2 gewahlt werden13.Da in dieser Arbeit jedoch nicht die absoluten Werte sondern deren Verhaltnisse zueinanderwichtig sind, kann auf diese zusatzliche Skalierung verzichtet werden.
Der (digitale) Lock-In-Verstarker berechnet im ersten Schritt die Inphase- und Quadratur-Komponente (if bzw. qf ). Hierzu muss das Messsignal mit den Referenzsignalen multipliziertund anschließend mit einem Tiefpass gefiltert werden. Als Tiefpassfilter wird ein (gleitender)Mittelwert uber das komplette Signalfenster verwendet, da dieser ideal fur die Extraktion desGleichanteils ist14. Somit kann einfach das Skalarprodukt aus Messsignal und Referenzsignalberechnet und anschließend durch die Anzahl der Messpunkte geteilt werden.
if =1
Nw
(mT · rf ) =1
Nw
Nw−1∑i=0
m[i] · rf [i]
qf =1
Nw
(mT · rf,90°) =1
Nw
Nw−1∑i=0
m[i] · rf,90°[i]
(5.5)
Die Charakteristik eines FIR-Filters andert sich durch einen konstanten Faktor auf alle Gewichtenicht. Dennoch hat die zusatzliche Skalierung mit der Fenstergroße den Vorteil, die verschiedenenFenstergroßen aufeinander abzubilden. Da einfache Sinusschwingungen als Referenzsignaleeingesetzt werden, entspricht das Ergebnis an dieser Stelle exakt der (komplexwertigen) DFT.Die Inphase-Komponente entspricht dem Realanteil und die Quadratur-Komponente demImaginaranteil.
12Dual-Phase Lock-In-Verstarker, siehe Kapitel 3.3.213siehe Gleichung 3.15 in Kapitel 3.3.114siehe Kapitel 3.2.4
51

5 Entwicklung
Aus den Inphase- und Quadratur-Komponenten konnen nun der Betrag15 und die Phasenver-schiebung zwischen Mess- und Referenzsignal berechnet werden.
mf =√i2f + q2f
∆ϕf = tan−1(qfif
)(5.6)
Die Betrage entsprechen den gesuchten Informationen, die in der Signalverarbeitung weiter-verarbeitet werden, wohingegen die Phasenverschiebung in dem aktuellen Sensorsystem keineweitere Verwendung findet. Der berechnete Betrag fur eine Wellenlange wl ∈ WL, die miteiner Frequenz f ∈ F moduliert wurde, wird im Folgenden mit mwl,f bezeichnet. Wenn dieModulationsfrequenz in dem Kontext keine tragende Rolle spielt, dann wird diese aus Grundender Ubersichtlichkeit weggelassen und die Darstellung kann weiter vereinfacht werden:
mwl,f = mf , fur (wl, f) ∈ C, bzw.
mwl = mf , fur (wl, f) ∈ C(5.7)
5.2.3 Nachverarbeitung (Sensorkalibration)
Die Sensorkalibration soll die Genauigkeit der Remissionsmessungen erhohen, indem mogliche sys-tematische Fehler korrigiert werden. Da mehrere Tragersignale per Frequenzmultiplex gleichzeitigauf verschiedenen Frequenzen ubertragen werden, sollte die Kalibration das frequenzabhangigeVerhalten des Sensorsystems widerspiegeln, welches durch die analoge Signalkonditionierungbestimmt wird16. Deswegen kommen in dieser Arbeit sogenannte Frequenzsweeps zum Einsatz,wie sie z. B. aus Impedanzmessungen bekannt sind. Bei einem Frequenzsweep werden verschie-dene Frequenzen nacheinander eingestellt, um eine frequenzabhangige Große zu bestimmen.Eine sinnvolle Frequenzauswahl fur einen Frequenzsweep lasst sich aus der Bandbegrenzungder analogen Signalverarbeitung und der diskreten Frequenzauflosung ableiten17 und wird imFolgenden in einer Menge Fsweep zusammengefasst. Hierbei konnen die Frequenzsweeps fur jedeWellenlange separat durchfuhrt werden, um mogliche Interferenzen zwischen den Tragersignalenvon vornherein auszuschließen. Ebenfalls ist es ratsam fur jeden der Detektoren (Photodioden)die Kalibration separat zu ermitteln, um technisch bedingten Unterschieden zwischen deneinzelnen Kanalen entgegen zu wirken.
In einem ersten Entwurf der Sensorkalibration sollen im Wesentlichen zwei verschiedenen Ein-flussen entgegengewirkt werden. Die Frequenzgangkalibration (Frequency Response Calibration,FRC) soll die unterschiedlichen Dampfungen bei den verschiedenen Modulationsfrequenzenkompensieren. Das Sensorsystem hat eine Default-Konfiguration (Cdefault), mit der die Material-messungen durchgefuhrt und die Klassifikatoren konstruiert werden. Sollte sich zu einem spaterenZeitpunkt die Konfiguration (adaptiv) verandern, so konnte dies die Remissionsmesswerte auf-grund einer anderen Dampfung beeinflussen und somit die Funktion der Materialklassifikatorenggf. beeintrachtigen. Mit der Nullremissionskalibration (Null Remission Calibration, NRC) solleine Nullpunktkorrektur des Sensorsystems durchgefuhrt werden. Dies ist notwendig, da eindeutliches Signal auch ohne Messobjekt und reflektierter NIR-Strahlung messbar ist. Die zusatz-
15engl.: magnitude16siehe Kapitel 4.1.317siehe Kapitel 4.2.2
52

5 Entwicklung
lichen Signalanteile uberlagern sich additiv auf die reflektierten Tragersignale und entstehendurch direktes Ubersprechen des Senders auf den Empfanger. Diese additive Komponente istrelativ konstant und kann bei großeren Messdistanzen die Großenordnung der eigentlichenTragersignalamplituden erreichen, was die Verhaltnisse zwischen den Remissionsmesswertenstark beeinflusst und die maximale Reichweite des Sensorsystems einschrankt.
Die FRC wird aus den Messdaten eines Frequenzsweeps berechnet. Als Messobjekt solltebei einem Abstand, welcher in der vorgesehenen Messdistanz des Sensors liegt, ein Materialverwendet werden, was eine relativ gleichmaßige Remissionscharakteristik uber die verwendetenWellenlangen aufweist (z. B. eine Weißreferenz). Bei jeder Wellenlangen-Frequenz-Kombinationsollten mehrere Messungen durchgefuhrt werden, um mit einer Mittelung zufallige Fehlerkorrigieren zu konnen.
FRCwl,f =1
k
k−1∑i=0
mwl,f,i, fur wl ∈WL und f ∈ Fsweep (5.8)
Das Ergebnis entspricht dem Frequenzgang des kompletten Sensorsystems fur jede Wellenlangeund kann genutzt werden, um die Frequenzen mit der kleinsten Dampfung fur die Default-Konfiguration auszuwahlen. Ein Korrekturfaktor zur Kompensation von Frequenzwechselnkann berechnet werden, indem alle FRC-Werte mit dem FRC-Wert der Default-Konfigurationskaliert werden. Die skalierten FRC-Werte sind somit an der Default-Konfiguration gleich 1und beeinflussen den normalen Betrieb nicht.
FRCwl,f,scaled =FRCwl,fFRCwld,fd
, fur (wld, fd) ∈ Cdefault, wl ∈WL und f ∈ Fsweep (5.9)
Die NRC wird ebenfalls uber Frequenzsweeps bestimmt, wobei sichergestellt werden muss,dass sich kein Messobjekt vor dem Sensor befindet und somit keine NIR-Strahlung reflektiertwerden kann. Da kein eigentliches Messsignal vorhanden ist, anhand dessen der PGA eingestelltwerden konnte, sollte fur alle Verstarkungsstufen das Ubersprechen separat ermittelt werden.Die verschiedenen PGA-Verstarkungen konnen in einer Menge PGA zusammengefasst werden.
NRCwl,f,PGAj=
1
k
k−1∑i=0
mwl,f,i, fur wl ∈WL, f ∈ Fsweep und PGAj ∈ PGA (5.10)
Die beiden beschriebenen Kalibrationen konnen nun auf die Remissionsmesswerte angewandtwerden, wobei die NRC einen Offset und die FRC eine Skalierung darstellt.
mwl,calibrated =mwl,f −NRCwl,f,PGAcurrent
FRCwl,f,scaled, fur (wl, f) ∈ C und PGAcurrent ∈ PGA (5.11)
5.2.4 Berechnung der Materialerkennungsmerkmale
Der Abstand zu dem Messobjekt beeinflusst die absoluten Werte der Remissionsmesswerte,jedoch nicht das relative Verhaltnis dieser zueinander. Daher werden in einem weiteren Schrittdie Remissionsmesswerte zu den Materialerkennungsmerkmalen aufbereitet. Das Ziel ist nebeneiner Entfernungsunabhangigkeit eine Verbesserung der linearen Separierbarkeit und somit
53

5 Entwicklung
eine Vereinfachung der Materialklassifikation. In fruheren Arbeiten wurden verschiedene Merk-malsraume eingesetzt, die in dieser Arbeit miteinander verglichen werden. Die vier verschiedenenMerkmalsraume konnen in zwei Gruppen aufgeteilt werden, je nachdem ob bei der Berechnungzwei oder alle drei Wellenlangen miteinander kombiniert werden.
Kombination zweier Wellenlangen
Werden die Remissionsmesswerte zweier Wellenlangen miteinander kombiniert, so gibt esallgemein
(|WL|2
)Kombinationen, wenn beim Auswahlen die Reihenfolge nicht beachtet wird.
Die Reihenfolge wird nicht berucksichtigt, damit jede Wellenlange nur einmal mit einer anderenWellenlange kombiniert wird und somit unnotige Redundanzen vermieden werden.
Einer der ersten Merkmalsraume, die in der am ISF entwickelten Punktsensorik eingesetztwurde, sind die Quotienten. Sie sind das einfache Verhaltnis zweier Wellenlangen und konnenwie folgt berechnet werden.
qwli/wlj =mwli
mwlj
fur wi, wlj ∈WL und wli < wlj (5.12)
Ein Nachteil der Quotienten ist die fehlende Normierung, was dazu fuhren kann, dass dienumerischen Werte sehr groß bzw. sehr klein ausfallen konnen und im Allgemeinen keinWertebereich festgelegt werden kann.
Eine weitere Variante zwei Wellenlangen zu kombinieren sind die normierten Differenzen,deren Berechnung analog zum NDVI18 durchfuhrbar ist. Sie werden im ISF in den NIR-Kamerasystemen eingesetzt und berechnen sich aus dem Verhaltnis der Differenz zu der Summezweier Wellenlangen.
dwli−wlj =mwli −mwlj
mwli +mwlj
, fur wi, wlj ∈WL und wli < wlj (5.13)
Durch die Normierung ergibt sich ein Wertebereich zwischen −1 und +1, was vorteilhaft furdie spatere Weiterverarbeitung ist. Manche Klassifikatortypen (z. B. Support Vector Machines)konnen durch numerisch große Werte in ihrer Funktion beeinflusst werden.
Kombination dreier Wellenlangen
Die in dieser Arbeit verwendeten und durch Kombination dreier Wellenlangen entstehendenMerkmalsraume haben ihren Ursprung in der Farbmetrik. Aufgrund der Forschungsarbeiten anden NIR-Kamerasystemen und den damit erstellten Falschfarbenbilder, ist die Idee entstanden,andere etablierte Methoden aus der Bildverarbeitung einzusetzen.
Die normierte spektrale Signatur ist angelehnt an die Normierung der Normfarbtafeln19. Dabeiwird der dreidimensionale Farbraum durch eine ubersichtlichere zweidimensionale Flache dar-gestellt, indem die verschiedenen Farben eines Farbtones auf einen Punkt abgebildet werden.
18siehe Kapitel 2.1.119auch bekannt als
”CIE-Schuhsohle“
54

5 Entwicklung
Eine solche Umrechnung lasst sich realisieren, indem ein Wert durch die Summe aller Wertegeteilt wird.
swl =mwl∑
wli∈WL
mwli
, fur wl ∈WL mit∑
wl∈WL
swl = 1 (5.14)
Durch die Normierung ist sichergestellt, dass die Summe der normierten spektralen Signaturimmer gleich 1 ist und somit aus zwei Werten der dritte berechnet werden kann. Prinzipiellkann diese Normierung auch auf mehr als drei Wellenlangen angewendet werden, wodurchjedoch tendenziell sehr kleine numerische Werte entstehen konnen.
Ein weiterer moglicher Merkmalsraum besteht in der Nachbildung eines virtuelles Farbraumes.Hierbei konnen die drei Wellenlangen als RGB-Farbinformationen interpretiert und eine Transfor-mation in einen anderen Farbraum durchgefuhrt werden. Der HSV-Farbraum ist ein bekannterFarbraum, in dem eine Farbe durch den Farbwert (engl. hue), der Farbsattigung (engl. saturati-on) und der Dunkelstufe (engl. value) dargestellt wird. Er eignet sich besonders zur intuitivenBeschreibung und dem Vergleich von Farben untereinander. In den NIR-Falschfarbenbildern20
werden die verschiedenen Hauttypen durch einen sehr ahnlichen Farbton dargestellt, wodurchdieser Farbraum moglicherweise die Erkennung vereinfacht. Die in dieser Arbeit eingesetzteHSV-Transformation folgt dem Formelsatz von Travis [For+98]. Fur die korrekte Funktionmuss die Vorbedingung erfullt sein, dass die Remissionsmesswerte zwischen 0 und 1 liegen.Daher wurden experimentell die maximal auftretenden Werte ermittelt und fur eine Skalierungverwendet.
Abbildung: m1050 nm → R, m1200 nm → G, m1550 nm → B
Vorbedingung: R,G,B ∈ [0, 1]
max =MAX (R,G,B)
min =MIN (R,G,B)
H =
0, falls max = min⇔ R = G = B
60◦ ·(0 + G−B
max−min
), falls max = R
60◦ ·(2 + B−R
max−min
), falls max = G
60◦ ·(4 + R−G
max−min
), falls max = B
(5.15)
falls H < 0◦ dann H := H + 360◦
S =
{0, falls max = 0⇔ R = G = B = 0max−minmax
, sonst
V = max
Nachbedingung: H ∈ [0◦, 360◦], S, V ∈ [0, 1]
20siehe Abbildung 3.2 in Kapitel 3.1.1
55


6 Evaluation
Die Evaluation beschreibt verschiedene Versuchsreihen und beginnt mit einer Herleitung derSensorkonfiguration, mit der ein Großteil der Evaluation durchgefuhrt wurde. Einem Vergleichder verschiedenen in dieser Arbeit vorgestellten Merkmalsraume zur Hauterkennung, folgt eineUntersuchung der maximalen Messdistanz des Sensorsystems. Abschließend wird in Versuchendemonstriert, dass durch Konfigurationsanderungen einige ungunstige Messbedingungen be-herrscht werden konnen. Im Anhang dieser Arbeit sind einige zusatzliche Visualisierungen vonrealen Messdaten zu finden, anhand denen verschiedene in dieser Arbeit beschriebene Effekteerkennbar sind1.
6.1 Sensorkonfiguration
6.1.1 Charakteristik der realen Tragersignale
Das verwendete Sensorsystem hat eine unvorhergesehene Charakteristik, welche die Frequenz-auswahl einschrankt und berucksichtigt werden muss. Die empfangenen Tragersignale enthaltengerade und ungerade Harmonische (siehe Abbildung 6.1). Dennoch entspricht das Signal keiner(idealen) Kippschwingung, da bei dieser die Amplituden der Harmonischen mit steigenderFrequenz abfallen, wodurch die erste gerade Harmonische eine großere Amplitude hat als dieerste ungerade. Es ist aber zu erkennen, dass die geraden Harmonischen eine deutlich geringereAmplitude aufweisen als die ungeraden.
0
1000
2000
3000
4000
5000
6000
7000
0 20 40 60 80 100
Mag
nitude
(raw
)
Frequency (kHz)
(a) Nur LED1020 nm mit f1020 nm = 5 kHz
0
2000
4000
6000
8000
10000
12000
0 20 40 60 80 100
Mag
nitude
(raw
)
Frequency (kHz)
(b) Nur LED1020 nm mit f1020 nm = 10 kHz
Abbildung 6.1: Harmonische des realen Tragersignals (fs = 200 kHz, Nw = 200)
Ein fruhes Funktionsmuster des Sensorsystems hat ein solches Verhalten noch nicht gezeigt.Im direkten Vergleich zwischen Funktionsmuster und aktuellem Prototypen konnte als eine
1siehe Kapitel A.1
57
6 Evaluation
mogliche Ursache die verwendeten LED-Treiber identifiziert werden. Das Funktionsmusternutzte Treiberstufen auf Basis eines Linearreglers2, wahrend beim Prototyp Schaltregler3 zumEinsatz kommen. Ein Schaltregler hat den großen Vorteil einer geringeren Verlustleistung,die zu einer niedrigeren Eigenerwarmung der Elektronik fuhrt und sich somit positiv auf dieLebenserwartung und das Rauschverhalten der optoelektronischen Komponenten auswirkensollte. Fur seine Funktion benotigt er jedoch i. d. R. ausgangsseitig einen Energiespeicher,welcher vermutlich fur die erwahnten zusatzlichen Frequenzanteile verantwortlich ist. EinfacheSchaltungen zur Erzeugung von Kippschwingungen beruhen darauf, dass ein Energiespeicherlangsam geladen und schnell entladen wird.
Durch die zusatzlichen Frequenzanteile sind Interferenzen zwischen den Harmonischen derTragersignale nur schwer auszuschließen. Daher wird in der folgenden Evaluation nur dieHauptwelle der Tragersignale durch einfache Sinusschwingungen als Referenzsignale demoduliert.Ebenfalls verkleinert sich der einfach nutzbare Frequenzbereich, da die erste Harmonische derkleinsten Tragerfrequenz nicht auf der dreifachen sondern auf der doppelten Frequenz liegt.Unter Berucksichtigung dieser Gegebenheiten ist jedoch ein storungsfreier Betrieb moglich.
6.1.2 Auswahl der Sensorparameter
Als ersten Schritt in der Evaluation wurde systematisch eine Default-Konfiguration ermittelt,mit der die restlichen Versuchsreihen durchgefuhrt werden konnten. Da in Kapitel 4.2.2bereits eine Messdauer von 1 ms definiert wurde, fehlen nur noch eine Abtastrate und dieTragersignalfrequenzen fur eine komplette Konfiguration.
Auswahl der Tragersignalfrequenzen
Die Tragersignalfrequenzen werden in dieser Arbeit anhand des frequenzabhangigen Verhaltensdes Sensorsystems bestimmt. Hierzu wurde eine FRC-Kalibration mit einer erhohten Abta-strate von 400 kHz durchgefuhrt, die etwa einer vierfachen Uberabtastung entspricht. Da dievorhandenen Weißreferenzen relativ klein waren und die Messpunkte sich mit dem Abstandvergroßerten, kam ein Referenzmessobjekt aus mehreren Lagen Druckerpapier4 zum Einsatz,um mit allen Messpunkten eine Uberlappung mit dem Messobjekt zu erreichen. Druckerpapierenthalt optische Aufheller, die jedoch erst mit ultravioletter Strahlung5 ihre Wirkung entfalten.Daher hat das Referenzmessobjekt in den verwendeten Wellenlangen ahnliche spektrale Eigen-schaften wie eine Weißreferenz. Die FRC-Kalibration besteht aus insgesamt 15 Datensatzen(funf Photodioden und drei Wellenlangen), die jedoch redundante Informationen beinhalten.Daher werden in Abbildung 6.2 nur die wesentlichen Informationen zusammengefasst.
Die FRC-Kalibrationskurven haben alle eine ahnliche Form. Abweichungen in den absolutenWerten entstehen aufgrund der verschiedenen optischen Ausgangsleistungen fur jede Wel-lenlange (Abbildung 6.2a) bzw. der leicht unterschiedlichen Verstarkungen in der analogenSignalverarbeitung durch Fertigungstoleranzen der verwendeten Bauteile (Abbildung 6.2b).Mithilfe der Kurven kann einfach ein Frequenzbereich fur die Tragersignalfrequenzen identifi-
2Maxim Integrated MAX168243Texas Instruments LM3407MY4100 g/m2
5DIN 5031-7: Ultraviolett ist zwischen 100 nm und 380 nm
58

6 Evaluation
0
2000
4000
6000
8000
10000
12000
0 10 20 30 40 50
Mea
n M
agnitude
(raw
)
Frequency (kHz)
1020nm1200nm1550nm
(a) PD 0 - Alle LEDs
0
1000
2000
3000
4000
5000
6000
7000
8000
0 10 20 30 40 50
Mea
n M
agnitude
(raw
)
Frequency (kHz)
PD0PD1PD2PD3PD4
(b) Alle PDs - LED1550 nm
Abbildung 6.2: Unskalierte FRC-Kalibration
ziert werden, der das Maximum beinhalten sollte. Alle Kurven haben ihr Maximum bei einerModulationsfrequenz von etwa 13 kHz und einen gut nutzbaren Bereich zwischen 10 kHz und20 kHz.
Die Auswahl der Tragersignalfrequenzen wurde unter Berucksichtigung der aufgestellten Regelnin Kapitel 4.2.2 durchgefuhrt. Aufgrund der besonderen Bedeutung fur die Hauterkennungsollte das Tragersignal fur 1550 nm mit der Frequenz moduliert werden, welche am geringstengedampft wird. Die anderen beiden Wellenlangen wurden entsprechend der optischen Aus-gangsleistung mit einem Abstand von 3∆f daneben platziert. Dadurch sind zwei diskreteFrequenzschritte zwischen den Modulationsfrequenzen unbesetzt, um z. B. Leck-Effekte einfachfeststellen zu konnen. Die ausgewahlten Default-Tragersignalfrequenzen sind: f1020 nm = 10 kHz,f1200 nm = 16 kHz und f1550 nm = 13 kHz. Sofern nicht anders gekennzeichnet, werden dieseModulationsfrequenzen im Folgenden fur die restliche Evaluation verwendet.
Die kleinste ausgewahlte Modulationsfrequenz ist demnach 10 kHz, wodurch die erste Harmoni-sche auf 20 kHz liegt. Der Frequenzbereich zwischen der großten Modulationsfrequenz und derersten Harmonischen bietet Reservefrequenzen fur die Selbsttests.
Auswahl der Abtastrate
Durch die verwendete Abtastrate muss ein Kompromiss zwischen der benotigten Rechenzeitund vernachlassigbarem restlichen Aliasing eingegangen werden. Da die Messdauer fest definiertwurde, steigt die Fenstergroße und damit die benotigte Rechenzeit proportional mit derAbtastrate. Im Gegensatz dazu lassen sich die Harmonischen der Tragersignale durch denAnti-Aliasing-Tiefpass nur dampfen, wodurch das entstehende Aliasing prinzipiell nur mit einerhoheren Abtastrate korrigiert werden kann.
Fur die Auswahl einer Default-Abtastrate wurden Messungen mit verschiedenen Abtastratendurchgefuhrt. Abbildung 6.3 zeigt eine Messung des Papier-Referenzobjektes bei einer Abtastratevon 800 kHz.
In der linearen Skalierung (Abbildung 6.3a) sind im Bereich zwischen 50 kHz und 100 kHz nocheinige der Harmonischen erkennbar. Daruber hinaus sind die Anteile so stark gedampft, dasssie erst in der logarithmischen Skalierung (Abbildung 6.3b) wieder deutlich sichtbar werden.Die Frequenzanteile nehmen erwartungsgemaß mit steigender Frequenz stetig ab und erreichen
59

6 Evaluation
0
2000
4000
6000
8000
10000
12000
0 50 100 150 200 250 300 350 400
Mag
nitude
(raw
)
Frequency (kHz)
(a) Lineare Skalierung
0
5
10
15
20
25
30
35
40
45
0 50 100 150 200 250 300 350 400
Mag
nitude
(dB)
Frequency (kHz)
(b) Logarithmische Skalierung
Abbildung 6.3: Papierreferenz bei hoher Abtastrate - fs = 800 kHz
bei etwa 200 kHz einen Grundpegel, welcher dem Grundrauschen des Sensorsystems entspricht.Ein leicht erhohter Anteil bei etwa 260 kHz entsteht durch den verwendeten Spannungsregler,welcher seine Schaltfrequenz in diesem Bereich hat. Da eine moglichst geringe Abtastrategewunscht ist, um die benotigte Rechenzeit kleiner als die Messdauer zu halten, wurde alsKompromiss eine Default-Abtastrate von 200 kHz ausgewahlt. Dies entspricht etwa einerQuantisierung mit zweifacher Uberabtastung.
6.1.3 Sensorkalibration
Mit den ausgewahlten Default-Tragersignalfrequenzen konnte die FRC-Kalibration skaliertwerden, um Korrekturfaktoren fur mogliche Frequenzwechsel zu berechnen. Abbildung 6.4zeigt hierzu die skalierten FRC-Kalibrationskurven. Eine gute Wahl der Modulationsfrequenzenzeigt sich in den skalierten Darstellungen dadurch, dass die Kurve den Wert 1 moglichst nichtuberschreitet. Diese Bedingung kann naturlich nicht fur alle Wellenlangen erfullt werden (sieheAbbildung 6.4a). Fur 1550 nm liegt die skalierte FRC-Kalibrationskurve jedoch im idealenBereich, da hier die bestmogliche Wahl getroffen wurde (siehe Abbildung 6.4b).
0
0.2
0.4
0.6
0.8
1
1.2
0 10 20 30 40 50
Mea
n M
agnitude
(sca
led)
Frequency (kHz)
1020nm1200nm1550nm
(a) PD 0 - Alle LEDs
0
0.2
0.4
0.6
0.8
1
1.2
0 10 20 30 40 50
Mea
n M
agnitude
(sca
led)
Frequency (kHz)
PD0PD1PD2PD3PD4
(b) Alle PDs - LED1550 nm
Abbildung 6.4: Skalierte FRC-Kalibration
Wahrend fur die NRC-Kalibration keine spezifischen Tragersignalfrequenzen ausgewahlt werdenmussen, wurde an dieser Stelle bereits die Default-Abtastrate verwendet, um die erzeugten
60
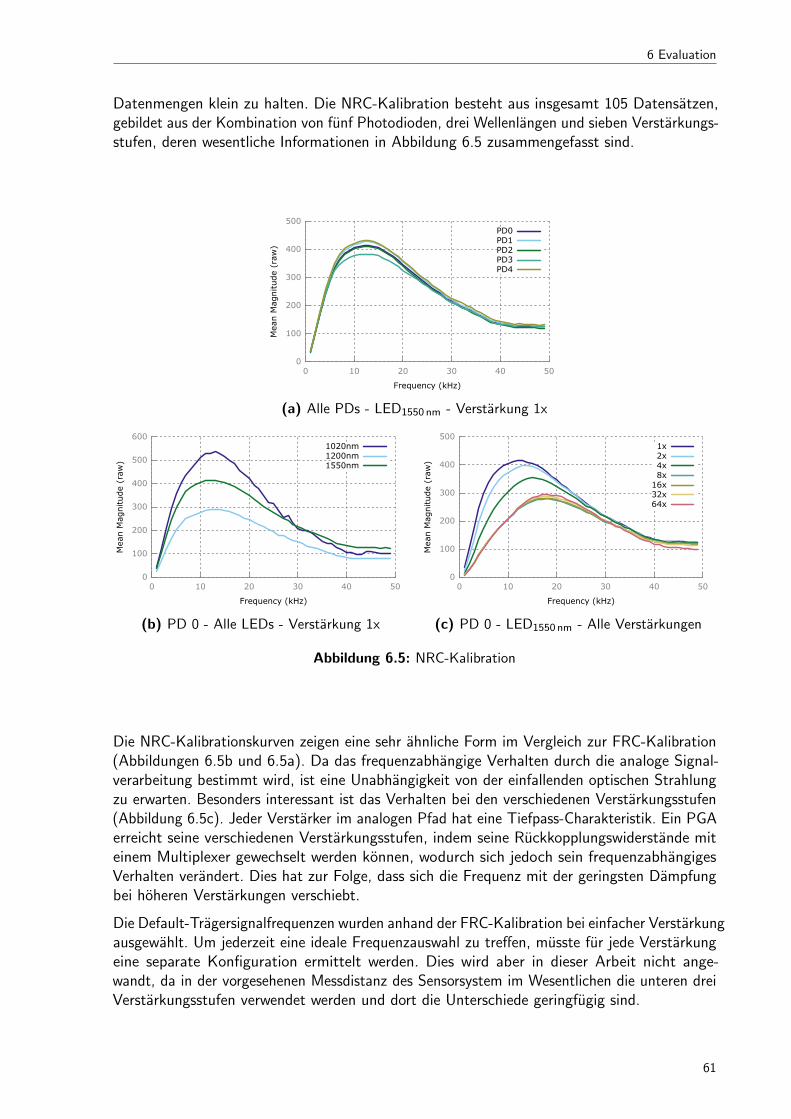
6 Evaluation
Datenmengen klein zu halten. Die NRC-Kalibration besteht aus insgesamt 105 Datensatzen,gebildet aus der Kombination von funf Photodioden, drei Wellenlangen und sieben Verstarkungs-stufen, deren wesentliche Informationen in Abbildung 6.5 zusammengefasst sind.
0
100
200
300
400
500
0 10 20 30 40 50
Mea
n M
agnitude
(raw
)
Frequency (kHz)
PD0PD1PD2PD3PD4
(a) Alle PDs - LED1550 nm - Verstarkung 1x
0
100
200
300
400
500
600
0 10 20 30 40 50
Mea
n M
agnitude
(raw
)
Frequency (kHz)
1020nm1200nm1550nm
(b) PD 0 - Alle LEDs - Verstarkung 1x
0
100
200
300
400
500
0 10 20 30 40 50
Mea
n M
agnitude
(raw
)
Frequency (kHz)
1x2x4x8x
16x32x64x
(c) PD 0 - LED1550 nm - Alle Verstarkungen
Abbildung 6.5: NRC-Kalibration
Die NRC-Kalibrationskurven zeigen eine sehr ahnliche Form im Vergleich zur FRC-Kalibration(Abbildungen 6.5b und 6.5a). Da das frequenzabhangige Verhalten durch die analoge Signal-verarbeitung bestimmt wird, ist eine Unabhangigkeit von der einfallenden optischen Strahlungzu erwarten. Besonders interessant ist das Verhalten bei den verschiedenen Verstarkungsstufen(Abbildung 6.5c). Jeder Verstarker im analogen Pfad hat eine Tiefpass-Charakteristik. Ein PGAerreicht seine verschiedenen Verstarkungsstufen, indem seine Ruckkopplungswiderstande miteinem Multiplexer gewechselt werden konnen, wodurch sich jedoch sein frequenzabhangigesVerhalten verandert. Dies hat zur Folge, dass sich die Frequenz mit der geringsten Dampfungbei hoheren Verstarkungen verschiebt.
Die Default-Tragersignalfrequenzen wurden anhand der FRC-Kalibration bei einfacher Verstarkungausgewahlt. Um jederzeit eine ideale Frequenzauswahl zu treffen, musste fur jede Verstarkungeine separate Konfiguration ermittelt werden. Dies wird aber in dieser Arbeit nicht ange-wandt, da in der vorgesehenen Messdistanz des Sensorsystem im Wesentlichen die unteren dreiVerstarkungsstufen verwendet werden und dort die Unterschiede geringfugig sind.
61

6 Evaluation
6.2 Vergleich der Materialerkennungsmerkmalsraume
Die verschiedenen Materialerkennungsmerkmalsraume werden in dieser Arbeit miteinanderverglichen, indem fur jeden Merkmalsraum die Hauterkennungsfahigkeit evaluiert wird. Hierfurwerden die Materialklassifikatoren mittels maschinellem Lernen erzeugt. Als Verfahren wurdeninnerhalb des ISF meist Entscheidungsbaume fur einfachere und Support Vector Machines furaufwendigere, nicht linear trennbare Probleme verwendet. Da die Unterscheidung zwischen Hautund gangigen Werkstoffen kein aufwendiges Problem darstellt, werden J48-Entscheidungsbaume6
zur Klassifizierung eingesetzt. Hierzu wird die Data-Mining-Software WEKA [Hal+09] genutzt,um einen Klassifikator zu trainieren und anschließend zu evaluieren.
Fur die Erstellung und Evaluation der Materialklassifikatoren mussen zuerst Messreihen durch-gefuhrt werden, um eine hinreichend große Datenbasis zu erhalten. Die Materialmessungenwurden systematisch mit dem Linearantrieb erhoben, indem die Materialproben uber die vomHersteller vorgesehene komplette Messdistanz gefuhrt und in Zentimeterabstanden jeweils50 Messungen aufgenommen wurden. Bei manchen Materialproben (insbesondere Holz undKunststoffe) musste der Mindestabstand auf etwa 10 cm angehoben werden, da eine Uber-steuerung im Messsignal erkennbar war. Dies liegt daran, dass in der Entwicklungsphase dieanaloge Verstarkung fur Haut ausgelegt wurde und diese prinzipiell eine starkere Absorption imNIR-Bereich aufweist. Alle eingemessenen Materialien sind in der Tabelle 6.1 zusammengefasst.
Materialklasse Messreihen Messungen Kommentar
Haut 20x 24000 Handinnen- und -aussenseite,10 Personen
Holz 10x 8000 Verschiedene WitterungsgradeHandschuhe 10x 9600 Latex, Leder, Nitril, StoffKunststoff 4x 3300 Verschiedene FarbenCPFlesh 1x 1200 Hautfarbenes Silikonkautschuk
fur Prothesen
Tabelle 6.1: Uberblick der verwendeten Materialien fur das maschinelle Lernen
Im Anschluss an die Messreihen wurde fur jede der Photodioden und jeden der Materialerken-nungsmerkmalsraume die Hauterkennungsfahigkeit evaluiert. Hierzu wurde jeweils eine 10-facheKreuzvalidierung durchgefuhrt, um aus der daraus entstandenen Konfusionsmatrix Kennzahlenzu berechnen7. Zusatzlich wird als Maß fur die lineare Separierbarkeit die Baumgroße (Anzahlder Knoten und Blatter) eingesetzt. Die Ergebnisse dieser Evaluation sind in der Tabelle 6.2 nurfur eine der Photodioden zusammengefasst, da die Unterschiede zwischen den verschiedenenPhotodioden geringfugig sind. Im Anhang dieser Arbeit sind die Evaluationsergebnisse deranderen Photodioden zu finden8.
Die erreichten Ergebnisse sind vergleichbar mit den fruheren Entwicklungen oder besser unddaher insgesamt sehr gut. Bei den (distanzabhangigen) Betragen sind einige wenige Fehlklassifi-zierungen vorgekommen und der Entscheidungsbaum ist erwartungsgemaß etwas großer. In allen
6Open-Source Implementation des C4.5-Algorithmus in WEKA7siehe Kapitel 3.4.28siehe Kapitel A.4
62

6 Evaluation
Merkmal ACC FNR FPR PREC Baumgroße
Betrage 0,999892 0,000208 0,000000 1,000000 21Quotienten 0,999978 0,000000 0,000045 0,999958 3Norm. Differenzen 0,999978 0,000000 0,000045 0,999958 3Norm. Signatur 0,999978 0,000042 0,000000 1,000000 3HSV 0,999978 0,000000 0,000045 0,999958 3
Tabelle 6.2: PD 0 - Vergleich der Materialerkennungsmerkmalsraume
anderen Merkmalsraumen ist dagegen maximal eine Fehlklassifizierung aufgetreten und die Ent-scheidungsbaume haben eine minimale Große (ein Knoten und zwei Blatter). Somit wird durchdie weitere Aufbereitung der Betrage zu den Merkmalsraumen, die hohe Erkennungsgenauigkeit(siehe ACC) noch weiter gesteigert. Interessant ist, dass die Richtung der Fehlklassifizierungen inden Merkmalsraumen nicht dieselbe ist. Bei den Betragen und der normierten Signatur handeltes sich um Fehlklassifizierungen in die unsichere Richtung (d. h. False Negative - siehe FNR),bei den Quotienten und den normierten Differenzen hingegen in die sichere Richtung (d. h.False Positive - siehe FPR). Daher konnte in manchen Merkmalsraumen eine perfekte Precisionerreicht werden, da alle als Haut klassifizierten Objekte auch Hautmessungen darstellten.
Durch die weitere Aufbereitung der Betrage zu den Materialerkennungsmerkmalsraumen konnendie Klassen mit einem einzigen Schwellwert getrennt werden, was gleichbedeutend mit einerperfekten linearen Separierbarkeit ist. Hierbei scheint es keine besonderen Unterschiede zwi-schen den verschiedenen Merkmalsraumen zu geben, was aber durchaus an dem einfachenKlassifizierungsproblem liegen kann. Somit erfullt jeder der Merkmalsraume das anvisierte Ziel,die Separierbarkeit zu erhohen und damit die Hauterkennung zu verbessern.
Die genauere Betrachtung der konstruierten Entscheidungsbaume und der Haufigkeitsvertei-lung der Messwerte in den Merkmalsraumen liefern weitere Erkenntnisse, weshalb eine soeinfache Klassifizierung der Messdaten durchfuhrbar ist. In Abbildung 6.6 sind die Verteilun-gen der Betrage als Histogramm dargestellt. Aufgrund der erwartungsgemaß auftretendenUberschneidungen sind die Klassen nicht mit einem einfachen Schwellwert separierbar.
380.01 16536.5 32693
(a) m1020 nm
309.69 8842.64 17375.6
(b) m1200 nm
95.34 12903.72 25712.1
(c) m1550 nm
Abbildung 6.6: Haufigkeitsverteilung der Betrage(Rot
∧= Haut, Blau
∧= Material)
Abbildung 6.7 zeigt hingegen die Verteilungen der Merkmale, die durch Kombination zweierWellenlangen entstehen. Diese Merkmalsraume wurden bereits in fruheren Arbeiten des ISFeingesetzt.
Bei diesen Darstellungen ist leicht zu erkennen, dass es in beiden Merkmalsraumen jeweilszwei Merkmale gibt, mit denen eine Trennung durch einen einfachen Schwellwert durchgefuhrtwerden kann. Diese Merkmale entstehen durch Kombination der Remissionsinformationen von
63

6 Evaluation
1.17 2.17 3.17
(a) q1020 nm/1220 nm
0.87 10.28 19.69
(b) q1020 nm/1550 nm
0.6 4.45 8.3
(c) q1220 nm/1550 nm
0.08 0.3 0.52
(d) d1020 nm−1220 nm
-0.07 0.42 0.9
(e) d1020 nm−1550 nm
-0.25 0.27 0.78
(f) d1220 nm−1550 nm
Abbildung 6.7: Haufigkeitsverteilung der Merkmalsraume durch Kombination zweier Wellenlangen(Rot
∧= Haut, Blau
∧= Material)
1020 nm bzw. 1220 nm mit 1550 nm. Wie bereits in den Grundlagen erlautert, ist die starkeAbsorption bei 1550 nm im Vergleich zu den anderen Wellenlangen das wichtigste Kriterium zurHauterkennung im nahen Infrarot. Die Verteilungen in den Merkmalsraumen zeigen deutlich,dass eine Unterscheidung von Haut und gangigen Werkstoffen bereits mit zwei Wellenlangendurchgefuhrt werden kann. Arbeiten in der Biometrie mit den NIR-Kameras haben jedochgezeigt, dass zusatzliche Wellenlangen in manchen Situationen hilfreich zur Falschungserkennungsind. Aus Sicht der Sicherheit hat jedoch ein False Positive keine fatalen Auswirkungen undverringert nur die Verfugbarkeit. Dennoch sind die zusatzlichen Wellenlangen sinnvoll, um eineRedundanz und eine Robustheit gegenuber unbekannten Materialien zu erreichen.
Die Merkmalsraume, die durch Kombination dreier Wellenlangen entstehen, wurden bisher inkeiner anderen bekannten Arbeit zur Materialerkennung eingesetzt. Abbildung 6.8 stellt dieVerteilungen in diesen beiden Merkmalsraumen dar.
0.35 0.54 0.72
(a) s1020 nm
0.21 0.27 0.32
(b) s1200 nm
0.03 0.22 0.4
(c) s1550 nm
0.02 179.81 359.61
(d) H
0.01 0.46 0.92
(e) S
0.01 0.37 0.73
(f) V
Abbildung 6.8: Haufigkeitsverteilung der Merkmalsraume durch Kombination dreier Wellenlangen(Rot
∧= Haut, Blau
∧= Material)
In diesen beiden Merkmalsraumen gibt es jeweils ein Merkmal, anhand dessen eine Trennungmit einem einfachen Schwellwert durchgefuhrt werden kann. Bei der normierten spektralenSignatur ist dies erwartungsgemaß der Wert, welcher den Anteil der Remission von 1550 nm an
64

6 Evaluation
der Gesamtremission reprasentiert. Da bei dieser Wellenlange eine starke Absorption bei Haut-messungen erwartet wird, kann Haut dadurch erkannt werden, dass der Wert dieses Merkmalssehr klein wird. Im HSV-Farbraum wird interessanterweise nicht der Farbton (H), sondern dieSattigung (S) fur eine Trennung verwendet. Bei genauerer Betrachtung der Messdaten ist zuerkennen, dass auch andere Materialien (Holz und CPFlesh) einen ahnlichen Farbton liefernkonnen. Dass die Sattigung verwendet wird hat einen sehr einfachen Grund: Unter den vermes-senen Materialien gibt es kein anderes Material, das wie Haut in den verwendeten Wellenlangenin einer stark absorbiert und einer anderen stark reflektiert. Zum Bearbeitungszeitpunkt ist(dem Autor) auch kein fur die hier anvisierten Anwendungen relevantes Material bekannt,das eine solche Eigenschaft wie Haut in anderen Wellenlangenkombinationen im NIR-Bereichaufweist. Um sinnvoll auf unbekannte Materialien reagieren zu konnen, konnte die Robustheitdes Klassifikators durch Hinzunahme weiterer Schwellwerte gesteigert werden. Im Falle desHSV-Farbraumes konnte dies eine zusatzliche Eingrenzung im Farbton sein, anstatt nur dieSattigung zu verwenden.
Aus dieser Evaluation ist auf den ersten Blick nicht direkt ein klarer Favorit fur die Wahl einesMerkmalsraums erkennbar. Die Quotienten und die normierten Differenzen haben jedoch denVorteil, dass jeweils anhand zweier Merkmale eine perfekte Trennung durchgefuhrt werden kann.Da nur zwei Wellenlangen miteinander kombiniert werden, entsteht eine zusatzliche Redundanz,wodurch die Sicherheit weiter gesteigert wird. Selbst wenn eine der drei Wellenlangen desSensorsystems aus technischen Grunden ausfallen sollte und dies durch die Selbsttests nichterkannt wird, konnten immer noch die anderen fur die Hauterkennung verwendet werden.Zusatzlich haben die normierten Differenzen den Vorteil des klar definierten Wertebereiches,was bei der weiteren Verarbeitung nutzlich sein kann. Daher sind die normierten Differenzeneine gute Wahl fur den Einsatz in dem Punktsensor fur die Hauterkennung.
6.3 Maximale Sensordistanz
Der vorgesehene Messbereich des Sensorsystem liegt bei 2 cm bis 25 cm. Dennoch wurden ineinigen Messreihen großere Messdistanzen verwendet, um die Grenzen des Sensors zu bestimmen.Damit die Messwerte sich bei hohen Messdistanzen dem Nullpunkt annahern, kam in dieserVersuchsreihe bereits die NRC-Kalibration zum Einsatz. In den folgenden beiden Abschnittenwerden zwei Messreihen unter Verwendung des Linearantriebs beschrieben, wobei in der erstenHaut und in der zweiten die Papierreferenz als Messobjekt diente.
6.3.1 Distanzmessung mit Haut
Die Distanzmessungen mit Haut sind besonders interessant, da der Sensor fur diesen Zweckursprunglich entwickelt wurde. Hierzu wurden in einem Bereich von 2 cm bis 50 cm in Millime-terschritten jeweils 100 Messungen aufgenommen, um daraus Mittelwert und SNR fur jede derDistanzen zu berechnen. Das Ergebnis dieser Messreihe ist in Abbildung 6.9 dargestellt. Da dieMesspunkte bei großeren Abstanden großer werden, wurde in der Darstellung ein Messpunktausgewahlt, fur den eine Uberlappung mit dem Messobjekt bei der kompletten Messdistanzgesichert war.
65

6 Evaluation
0
5000
10000
15000
20000
25000
30000
0 100 200 300 400 500
1x 2x 4x 8x 16x
Mea
n M
agnitude
(raw
)
Distance (mm)
PGA Gain
1050nm1200nm1550nm
(a) PD 4 - Alle LEDs - Mittelwert
0
5
10
15
20
25
30
0 100 200 300 400 500
1x 2x 4x 8x 16x
Mag
nitude
SN
R (
dB)
Distance (mm)
PGA Gain
1050nm1200nm1550nm
(b) PD 4 - Alle LEDs - SNR
Abbildung 6.9: Hautmessungen bei verschiedenen Distanzen
Anhand der Mittelwerte ist die quadratische Abnahme der Strahlungsintensitat deutlich erkenn-bar. Die anfangliche Zunahme der Signalstarke resultiert daraus, dass sich erst bei einem etwashoherem Abstand alle LED-Strahlengange mit den Messpunkten uberlagern. Unter Berucksich-tigung der Neigungs- und Offnungswinkel der LEDs sowie des Ringlicht-Durchmessers ergibtsich ein optimaler Mindestabstand von etwa 5 cm.
Das logarithmisch aufgetragene SNR nimmt nahezu linear bei großeren Abstanden ab. Ein starkverrauschter Kurvenverlauf resultiert daraus, dass die Messreihe sehr lange dauerte (≈ 40 min)und es fur die Messperson nicht leicht war, die Hand komplett still zu halten. Obwohl bei 50 cmdie mittlere Signalamplitude bereits auf unter 1% der maximalen Auslenkung abgesunken ist,kann immer noch ein deutlich messbares Signal festgestellt werden.
In dieser Messreihe konnte bereits die Auswirkung der NRC-Kalibration beobachtet werden.Ohne die Nullpunktkorrektur war die Hauterkennung nur bis etwa 30 cm stabil, wahrend siemit bis fast 50 cm zuverlassig funktionierte.
6.3.2 Distanzmessung mit Papierreferenz
In einer weiteren Messreihe wurde die maximale Distanz des Linearantriebes genutzt. Fur diesenVersuch wurde die Papierreferenz verwendet, um sicherzustellen, dass die Messpunkte uber derkompletten Messdistanz mit dem Messobjekt uberlappen. Hierzu wurden in einem Bereich von2 cm bis 150 cm in Zentimeterschritten jeweils 200 Messungen durchgefuhrt. Die Ergebnissesind in Abbildung 6.10 dargestellt.
Die Kurven haben eine sehr ahnliche Form wie bei den Hautmessungen. Der wesentlicheUnterschied besteht darin, dass die Papierreferenz deutlich mehr NIR-Strahlung reflektiert unddaher die absoluten Werte großer sind. Dies hatte zur Folge, dass unter 10 cm das Signalubersteuerte, was in einem starken Einbruch des SNR resultierte. Bei einem Abstand von 150 cmist das Signal bereits auf wenige Promille der absoluten Auslenkung abgesunken, trotzdem istes immer noch deutlich messbar. Hier zeigt sich die Fahigkeit des Lock-In-Verstarkers, ein sehrschwaches Signal noch festzustellen.
66

6 Evaluation
0
10000
20000
30000
40000
50000
0 200 400 600 800 1000 1200 1400 1600
1x 2x 4x 8x 16xM
ean M
agnitude
(raw
)
Distance (mm)
PGA Gain
1020nm1200nm1550nm
(a) PD 4 - Alle LEDs - Mittelwert
0
5
10
15
20
25
30
0 200 400 600 800 1000 1200 1400 1600
1x 2x 4x 8x 16x
Mag
nitude
SN
R (
dB)
Distance (mm)
PGA Gain
1020nm1200nm1550nm
(b) PD 4 - Alle LEDs - SNR
Abbildung 6.10: Papierreferenzmessungen bei verschiedenen Distanzen
Anhand dieser Messreihe wurden jedoch andere Problematiken erkennbar. Wahrend bei nahenDistanzen relativ leicht eine Ubersteuerung auftritt, werden bei hohen Distanzen die oberenbeiden Verstarkungsstufen des PGA nicht verwendet. Dass nicht alle Verstarkungsstufeneingesetzt werden, liegt vermutlich daran, dass das direkte Ubersprechen von dem Sender aufden Empfanger einen zu großen Signalanteil erzeugt. Der Ubersteuerung konnte durch eineAnpassung der festen analogen Verstarkung entgegen gewirkt werden. Zusatzlich zeigt dieSNR-Kurve vor manchen Verstarkungswechseln einen starken Einbruch, was darauf hindeutenkonnte, dass die untere Hysterese-Grenze zu tief angesetzt wurde.
In beiden Distanzmessungen waren die absoluten Werte der berechneten Rauschkomponentenabhangig von den absoluten Werten der Remissionsmessung und damit von der einfallendenNIR-Strahlung. Dies konnte ein Indiz dafur sein, dass das Schrotrauschen die dominanteRauschkomponente in dem Sensorsystem darstellt.
6.4 Beherrschung ungunstiger Messbedingungen
Einige ungunstigen Messbedingungen und Moglichkeiten zu ihrer Beherrschung wurden bereitsin Kapitel 4.3 vorgestellt. Diese Moglichkeiten sollen experimentell mit realen Messdaten desSensorsystems bestatigt werden. In den folgenden beiden Abschnitten wird daher gezeigt, dassdurch eine adaptive Frequenzkonfiguration des Sensorsystems, sowohl Ubersteuerungen imMesssignal als auch externen optischen Storsignalen (in Grenzen) entgegen gewirkt werdenkann.
Fur die durchgefuhrten Versuche wurde eine andere Default-Konfiguration als in der restli-chen Evaluation ausgewahlt, indem alle Frequenzen in einen etwas hoheren Frequenzbereichverschoben wurden. Dadurch ist ein großerer Frequenzbereich zwischen der großten Modula-tionsfrequenz und der ersten Harmonischen unbelegt, wodurch zum einen mehr Konfigurati-onsmoglichkeiten fur die Frequenzwechsel entstehen und zum anderen die Prinzipien deutlichererkennbar werden. Die verwendeten Default-Tragersignalfrequenzen sind: f1020 nm = 13 kHz,f1200 nm = 19 kHz und f1550 nm = 16 kHz.
67

6 Evaluation
6.4.1 Unpassende Signalstarke
Mit den Distanzmessungen in Kapitel 6.3 konnte bereits gezeigt werden, dass sich durch eineadaptive analoge Verstarkung der Messbereich des Sensorsystems deutlich erweitern lasst.Jedoch wurden bei diesen Messreihen auch Grenzen erkennbar: Durch eine zu hohe Signalstarkebei der minimalen Verstarkung, die in einer Ubersteuerung resultiert, verringert sich das SNRdeutlich. Die Tragersignalfrequenzen sind normalerweise so gewahlt, dass die Tragersignalemoglichst gering durch die analoge Signalverarbeitung gedampft werden. Jedoch konnte genaudiese unterschiedliche Dampfung an verschiedenen Frequenzen ausgenutzt werden, um einerleichten Ubersteuerung im Messsignal entgegen zu wirken.
Der folgende Versuch konnte zwar erfolgreich an dem behandelten Sensorsystem durchgefuhrtwerden, ist jedoch im Allgemeinen nicht ohne weiteres auf andere Sensoren ubertragbar.Sobald einer der Verstarker im analogen Pfad in Sattigung gerat, sind alle nachfolgendenBestandteile von den Ubersteuerungen betroffen. Da die analoge Signalkonditionierung eineVersorgungsspannung von 3,3 V und der ADC eine Referenzspannung von 3 V verwendet, tritteine Ubersteuerung zuerst im ADC auf, welcher mit Frequenzwechseln entgegen gewirkt werdenkonnte.
Fur die Messversuche wurde eine Holzprobe in einem Abstand von 5 cm vor dem Sensor platziert.Die dadurch entstehenden Messsignale sind in Abbildung 6.11 dargestellt. Bei der Default-Konfiguration (Abbildung 6.11a) sind die Ubersteuerungen durch zusatzliche Frequenzanteileerkennbar, die im ganzen sichtbaren Frequenzbereich verteilt sind. Diese zusatzlichen Fre-quenzanteile liegen auch auf den Modulationsfrequenzen, wodurch Interferenzen entstehen,was in einem Einbruch des SNR resultiert. Werden jedoch die Tragersignalfrequenzen in einenstarker gedampften Bereich verschoben (Abbildung 6.11b), so ist die Ubersteuerung nicht mehrvorhanden.
0
10000
20000
30000
40000
50000
0 10 20 30 40 50
Mag
nitude
(raw
)
Frequency (kHz)
(a) Ubersteuertes Signal
0
10000
20000
30000
40000
50000
0 10 20 30 40 50
Mag
nitude
(raw
)
Frequency (kHz)
(b) Frequenzwechsel
Abbildung 6.11: Beispiel fur eine Ubersteuerung und eine (adaptive) Reaktionsmoglichkeit
Die hier beschriebene Maßnahme funktioniert naturlich nur bei sehr leichten Ubersteuerungen.Alternativ konnte die optische Ausgangsleistung durch Ausschalten einzelner LEDs verringertwerden, wodurch sich jedoch die Messzeit insgesamt verlangert, da mehrere Messvorgangedurchgefuhrt werden mussten.
68

6 Evaluation
6.4.2 Externe optische Storsignale
Die Auswirkungen von (modulierten) optischen Storsignalen und mogliche Maßnahmen zurAufrechterhaltung der Sensorfunktion wurden in dieser Arbeit bereits theoretisch analysiert. Ineinem Versuchsaufbau konnte dies mit einem Storsender experimentell bestatigt werden. Umeine modulierte NIR-Strahlung zu erzeugen, wurden mehrere NIR-LEDs9 an einen LED-Treiber10
angeschlossen. Die Eingange des LED-Treibers wiederum wurden von einem Funktionsgene-rator11 gesteuert, der ein einstellbares Rechtecksignal bereitstellt. Fur den Storsender wurdemit 1070 nm absichtlich eine Wellenlange ausgewahlt, die von Haut relativ stark reflektiertwird. Insgesamt wurden funf der NIR-LEDs in Reihe geschaltet, wodurch der Storsender eineoptische Ausgangsleistung von etwa 25 mW erreichte.
Mit dem Storsignal konnten alle in dieser Arbeit beschriebenen Effekte beobachtet werden.Die Versuche wurden bei Hautmessung mit einem Abstand von etwa 20 cm durchgefuhrt. AlsAusgangssituation ist in Abbildung 6.12 eine ungestorte Messung ohne Storsender dargestellt.Dort ist deutlich zu erkennen, dass bei f1550 nm = 16 kHz ein schwaches Signal durch die starkeAbsorption entsteht, wodurch die Haut von dem Sensor ohne Probleme erkannt werden kann.
0
1000
2000
3000
4000
5000
0 10 20 30 40 50
Mag
nitude
(raw
)
Frequency (kHz)
Abbildung 6.12: Ungestorte Messung
Ein optisches Storsignal, dessen Modulationsfrequenz zwischen den diskreten Frequenzschrittenliegt, erzeugt leicht zu erkennende Leck-Effekte im Messsignal (Abbildung 6.13).
0
1000
2000
3000
4000
5000
0 10 20 30 40 50
Mag
nitude
(raw
)
Frequency (kHz)
Abbildung 6.13: Leck-Effekte durch Storsignal auf f = 21,5 kHz
9Roithner LED1070-310ISSI IS31LT336011Agilent 33500B Series
69

6 Evaluation
Wenn der Storsender jedoch auf eine der Modulationsfrequenzen eingestellt wird, so entstehenkeine Leck-Effekte und es kommt zu Interferenzen zwischen den Signalen. Bei Konfiguration desStorsignals auf die Frequenz der 1550 nm-LED (Abbildung 6.14a), ist ein starker Signalanteil aufdieser Frequenz erkennbar. Da der Materialklassifikator jedoch ein schwaches Signal aufgrundeiner starken Absorption erwartet, kann die Haut von dem Sensorsystem nicht mehr erkanntwerden. Mit einem Konfigurationswechsel (Abbildung 6.14b) auf eine unbelegte Frequenz kanndie Sensorfunktion wieder hergestellt und die Hauterkennung erneut gewahrleistet werden. DasStorsignal ist nun als vierter Signalanteil (unterhalb 25 kHz) im Messsignal erkennbar unddie gestorte Frequenz kann fur die (adaptive) Konfiguration des Sensorsystem ausgeschlossenwerden. Diese Frequenzwechsel konnten periodisch durchgefuhrt werden, um adaptiv immereine ungestorte Frequenz auszuwahlen.
0
1000
2000
3000
4000
5000
0 10 20 30 40 50
Mag
nitude
(raw
)
Frequency (kHz)
(a) Haut nicht erkanntStorsignal auf f1550 nm = 16 kHz
0
1000
2000
3000
4000
5000
0 10 20 30 40 50
Mag
nitude
(raw
)
Frequency (kHz)
(b) Haut wieder erkanntFrequenzwechsel von f1550 nm auf 22 kHz
Abbildung 6.14: Beispiel fur einen (adaptiven) Frequenzwechsel
70

7 Fazit & Ausblick
In dieser Arbeit konnte erfolgreich die Konzeption, Entwicklung & Evaluation der digitalenSignalverarbeitung eines (adaptiven) multispektralen Sensorsystems zur Hauterkennung durch-gefuhrt werden. Die bestehenden Verfahren wurden optimiert und die durchgefuhrten Arbeitenliefern eine umfangreiche Beschreibung der Funktionsprinzipien des neuen Sensorsystems.
Es wurden verschiedene ungunstige Messbedingungen in dem Sensorsystem analysiert undMoglichkeiten aufgezeigt, diese zu beherrschen. In praktischen Versuchen mit realen Mess-daten des Sensorsystems ließ sich die Wirksamkeit der Gegenmaßnahmen bestatigen. Vieledieser Einflusse waren in einem adaptiven Betrieb des Sensorsystems erkennbar und konntenbei erfolgreicher Neutralisierung die Sicherheitsfunktion des Sensors auch in einer gestortenUmgebung gewahrleisten.
Die digitale Signalverarbeitungskette ist um eine Sensorkalibration und um zusatzliche Merk-malsraume zur Materialklassifikation erweitert worden. Eine Sensorkalibration auf Basis vonFrequenzsweeps beschreibt das frequenzabhangige Verhalten des Sensorsystems, wodurch einebestmogliche Konfigurationswahl ermoglicht wird. Mit der FRC-Kalibration konnten Vorberei-tungen fur einen adaptiven Konfigurationswechsel getroffen und durch die NRC-Kalibrationdie maximale Reichweite des Sensorsystems deutlich vergroßert werden. Die verschiedenenMaterialerkennungsmerkmalsraume wurden in dieser Arbeit miteinander verglichen. Alle ver-besserten die Hauterkennungsfahigkeit und erhohten die Separierbarkeit im direkten Vergleichzu den (distanzabhangigen) Betragen, wobei die normierten Differenzen den Vorteil eines klardefinierten Wertebereiches und einer gewissen Redundanz besitzen.
Die Ergebnisse dieser Arbeit fließen in ein aktuelles Forschungsprojekt (BeyondSPAI) ein.In diesem soll eine mehrstufige Sensorik den Arbeitsbereich eines kollaborierenden Robotersabsichern. Der Punktsensor wird dabei als ein Bestandteil dieser mehrstufigen Sensorik eingesetzt,um den Werkzeugbereich des Roboters im Nahfeld zu uberwachen.
Die entwickelten Verfahren zeigen Verbesserungspotential auf. Anhand der NRC-Kalibration isterkennbar, dass sich das frequenzabhangige Verhalten des Sensorsystems mit den verschiedenenVerstarkungsstufen des PGA verandert. Derzeit sind die Korrekturfaktoren der FRC-Kalibrationnur fur eine Verstarkungsstufe optimiert. Zukunftig sollten auch in der FRC-Kalibration dieverschiedenen Verstarkungsstufen berucksichtigt werden, damit jederzeit eine korrekte Skalierungvorgenommen wird. Da die NRC-Kalibration eine sehr ahnliche Form aufweist, lasst sich diesegegebenenfalls auch zur Erzeugung der FRC-Kalibration heranziehen, was jedoch zunachst(experimentell) nachzuweisen ware. Die Frequenz mit der geringsten Dampfung ist von deraktuellen PGA-Verstarkung abhangig. Daher konnten die LED-Modulationsfrequenzen anhandder aktuellen Verstarkung (adaptiv) ausgewahlt werden. Als Alternative kommt die in demvorgesehenen Messbereich des Sensors großtmoglich vorkommende Verstarkung als Maßstabfur die Frequenzauswahl in Frage, da bei dieser die Signale erwartungsgemaß am schwachstensind. Wenn neben den Modulationsfrequenzen viele weitere Frequenzen zu uberwachen sind,bietet sich statt einer Lock-In-Detektion (DFT) der Einsatz einer FFT an.
71

7 Fazit & Ausblick
In praktischen Versuchen konnte der Einfluss eines externen optischen Storsignals nur dannneutralisiert werden, wenn dessen Modulationsfrequenz auf der diskreten Frequenzauflosungdes Sensorsystems liegt, da ansonsten Leck-Effekte im Messsignal entstehen. Eventuell konntedie exakte Storsignalfrequenz erfasst und durch Anderung der diskreten Frequenzauflosung(d. h. durch Anpassung von Abtastrate bzw. Fenstergroße) der Entstehung von Leck-Effekteentgegen wirken. Somit wurde das Sensorsystem in die Lage versetzt, sich adaptiv auf beliebigeexterne Storsignale einzustellen.
Das frequenzbasierte Messprinzip bietet interessante Weiterentwicklungsmoglichkeiten, diejedoch mit der aktuellen Sensorhardware nicht umsetzbar sind. Das ToF-Prinzip ermoglichteine intrinsische Messung der Distanz zu dem Messobjekt. Da hierfur jedoch sehr hohe Modu-lationsfrequenzen notwendig sind, ist es unter Umstanden sinnvoller, den Lock-In-Verstarkerals analoge Variante zu realisieren, sodass nur die Inphase- und Quadraturkomponenten furdie Weiterverarbeitung quantisiert werden mussten. Das neue Sensorkonzept bietet Weiterent-wicklungspotential fur den weiteren Einsatz in der Sicherheitstechnik. Durch eine geschickteAnordnung der Messpunkte kann erreicht werden, dass entweder Messpunkte gleichzeitig odernacheinander mit dem Messobjekt uberlappen. Wird zusatzlich eine Wellenlange auf mehrereFrequenzen moduliert, so entsteht eine echte Redundanz im optischen Pfad, die ansonstenschwer zu erreichen ist. Alternativ konnte eine digitale Modulation (z. B. Quadraturamplituden-modulation) anstatt einfacher Rechteckschwingungen eingesetzt werden, um selbst generiertevon fremden Signalen differenzieren zu konnen.
72
Literaturverzeichnis
[13810] DIN EN ISO 13855. Sicherheit von Maschinen - Anordnung von Schutzeinrich-tungen im Hinblick auf Annaherungsgeschwindigkeiten von Korperteilen. 2010-10(zitiert auf Seite 40).
[33405] DIN 33402-2. Ergonomie - Korpermaße des Menschen - Teil 2: Werte. 2005-12(zitiert auf Seite 40).
[BGH14] BGHM. BGHM Jahresbericht 2014. 2014 (zitiert auf Seite 1).
[Bre+84] L. Breiman, J. Friedman, C. J. Stone und R. A. Olshen. Classification and regressiontrees. CRC press, 1984 (zitiert auf Seite 27).
[Bro+05] I. N. Bronstein, K. A. Semendjajew, G. Musiol und H. Muhlig. Taschenbuch derMathematik, 6. vollstandig uberarbeitete und erganzte Auflage. WissenschaftlicherVerlag Harri Deutsch GmbH, Frankfurt am Main, 2005 (zitiert auf Seite 24).
[Cha+98] B. Chance, E. Anday, S. Nioka, S. Zhou, L. Hong u. a. “A novel method for fastimaging of brain function, non-invasively, with light”. In: Optics express 2.10(1998), S. 411–423 (zitiert auf Seite 4).
[Cha+08] S. Chang, Y. Cheng, K. V. Larin, Y. Mao, S. Sherif u. a. “Optical coherencetomography used for security and fingerprint-sensing applications”. In: IET ImageProcessing 2.1 (2008), S. 48–58 (zitiert auf Seite 5).
[Det+07] G. E. Determan und D. J. Wunderlin. “Encoded binary liveness detector”. Pat.US Patent App. 11/710,286. 2007 (zitiert auf Seite 3).
[Dic46] R. H. Dicke. “The measurement of thermal radiation at microwave frequencies”.In: Review of Scientific Instruments 17.7 (1946), S. 268–275 (zitiert auf Seite 22).
[Ein05] A. Einstein. “Uber einen die Erzeugung und Verwandlung des Lichtes betreffendenheuristischen Gesichtspunkt”. In: Annalen der Physik 322.6 (1905), S. 132–148(zitiert auf Seite 9).
[Faw04] T. Fawcett. ROC Graphs: Notes and Practical Considerations for Researchers.Techn. Ber. HP Laboratories, 2004 (zitiert auf Seite 28).
[Fer+03] A. F. Fercher, W. Drexler, C. K. Hitzenberger und T. Lasser. “Optical coherencetomography-principles and applications”. In: Reports on progress in physics 66.2(2003), S. 239 (zitiert auf Seite 4).
73

7 Literaturverzeichnis
[Fit88] T. B. Fitzpatrick. “The validity and practicality of sun-reactive skin types I throughVI”. In: Archives of Dermatology 124.6 (1988), S. 869 (zitiert auf Seite 7).
[Foi+11] S. Foix, G. Alenya und C. Torras. “Lock-in time-of-flight (ToF) cameras: a survey”.In: Sensors Journal, IEEE 11.9 (2011), S. 1917–1926 (zitiert auf Seiten 25, 80).
[For+98] A. Ford und A. Roberts. “Colour space conversions”. In: Westminster University,London 1998 (1998), S. 1–31 (zitiert auf Seite 55).
[Fri+05] M. Frigo und S. G. Johnson. “The Design and Implementation of FFTW3”. In:Proceedings of the IEEE 93.2 (2005). Special issue on “Program Generation,Optimization, and Platform Adaptation”, S. 216–231 (zitiert auf Seite 49).
[Hac85] M. Hacskaylo. “Automatic human body detector”. Pat. US Patent 4,500,784.1985 (zitiert auf Seite 3).
[Hal+09] M. Hall, E. Frank, G. Holmes, B. Pfahringer, P. Reutemann u. a. “The WEKAdata mining software: an update”. In: ACM SIGKDD explorations newsletter 11.1(2009), S. 10–18 (zitiert auf Seite 62).
[Her+06] E. Hering und R. Martin. Photonik. Springer-Verlag Berlin Heidelberg, 2006(zitiert auf Seiten 9–12).
[Her+12] E. Hering, R. Martin und M. Stohrer. Physik fur Ingenieure, 11. Auflage. Springer-Verlag Berlin Heidelberg, 2012 (zitiert auf Seiten 9, 25, 26).
[Hin+13] P. M. Hintenaus und H. Trinker. “Multifrequency lock-in detection with nonsinu-soidal references”. In: IEEE Transactions on Instrumentation and Measurement62.4 (2013), S. 785–793 (zitiert auf Seiten 4, 40).
[IAR09] Systems IAR. IAR C/C++ Development Guide - Compiling and Linking - forAdvanced RISC Machines Ltd’s ARM Cores. Techn. Ber. 2009 (zitiert aufSeite 47).
[Ins16] National Instruments. Schnelle Fourier-Transformation (FFT) und Fensterung.2016. URL: http://www.ni.com/white-paper/4844/de/ (zitiert auf Seite 18).
[Jac+55] J .A. Jacquez, J. Huss, W. McKeehan, J. M. Dimitroff und H. F. Kuppenheim.“Spectral Reflectance of Human Skin in the Region 0.7-2.6µm”. In: Journal ofApplied Physiology 8.3 (1955), S. 297. ISSN: 8750-7587 (zitiert auf Seite 7).
[Jun+10] N. Jung, D. Reinert und O. Schwaneberg. “A manually fed machine for workingon materials, objects and the like, and protective means for such a machine”. Pat.EP Patent EP2193878 A1, DE602007005490 D1. 2010 (zitiert auf Seite 5).
[Jun+15] N. Jung, O. Schwaneberg, S. Sporrer, H. Steiner, I. Groß u. a. “Adaptive, material-dependent height-control for protective hoods on panel saws”. In: Safety ofIndustrial Automated Systems - SIAS 2015, 8th Int. Conf. Koenigswinter, NRW,2015 (zitiert auf Seite 6).
74
7 Literaturverzeichnis
[Lug01] G. F. Luger. Kunstliche Intelligenz. Addison Wesley Longman bei Pearson EducationDeutschland, 2001 (zitiert auf Seite 27).
[Mas+08] J. M. Masciotti, J. M. Lasker und A. H. Hielscher. “Digital lock-in detection fordiscriminating multiple modulation frequencies with high accuracy and computa-tional efficiency”. In: IEEE transactions on instrumentation and measurement 57.1(2008), S. 182–189 (zitiert auf Seite 21).
[Meg+02] I. V. Meglinski und S. J. Matcher. “Quantitative assessment of skin layersabsorption and skin reflectance spectra simulation in the visible and near-infraredspectral regions”. In: Physiological measurement 23.4 (2002), S. 741 (zitiert aufSeite 7).
[Nun09] A. S. Nunez. “A physical model of human skin and its application for search andrescue”. Diss. DTIC Document, 2009 (zitiert auf Seite 4).
[Nun+08] A. S. Nunez und M. J. Mendenhall. “Detection of human skin in near infraredhyperspectral imagery”. In: Geoscience and Remote Sensing Symposium, 2008.IGARSS 2008. IEEE International. Bd. 2. IEEE. 2008, S. II–621 (zitiert aufSeite 4).
[Opp+99] A. V. Oppenheim und R. W. Schafer. Discrete-time signal processing, SecondEdition. Prentice Hall, 1999 (zitiert auf Seite 22).
[Oro14] L. Orozco. Use Synchronous Detection to Make Precision, Low Level Measurements.Techn. Ber. Analog Devices, 2014 (zitiert auf Seiten 23, 24).
[Pav+99] I. Pavlidis, P. Symosek, B. Fritz und N. Papanikolopoulos. “A near-infrared fusionscheme for automatic detection of vehicle passengers”. In: Computer Vision Beyondthe Visible Spectrum: Methods and Applications, 1999. (CVBVS’99) Proceedings.IEEE Workshop on. IEEE. 1999, S. 41–48 (zitiert auf Seite 3).
[Pav+02] I. Pavlidis, P. F. Symosek und B. S. Fritz. “Near-IR human detector”. Pat. USPatent US6370260 B1. 2002 (zitiert auf Seite 3).
[Pog+97] B. Pogue, M. Testorf, T. McBride, U. Osterberg und K. Paulsen. “Instrumentationand design of a frequency-domain diffuse optical tomography imager for breastcancer detection”. In: Optics express 1.13 (1997), S. 391–403 (zitiert auf Seite 4).
[Qui93] J. R. Quinlan. “C4.5: Programming for machine learning”. In: Morgan Kauffmann(1993), S. 38 (zitiert auf Seiten 27, 28).
[Qui86] J. R. Quinlan. “Induction of decision trees”. In: Machine learning 1.1 (1986),S. 81–106 (zitiert auf Seite 27).
[Sch16] T. Scheer. Entwicklung & Evaluation eines multispektralen optoelektronischenSensorsystems auf Lock-In-Filter-Basis. Masterprojekt. 2016 (zitiert auf Seite 1).
75

7 Literaturverzeichnis
[Sch13] O. Schwaneberg. “Concept, system design, evaluation and safety requirements fora multispectral sensor”. Diss. University of Siegen, 2013 (zitiert auf Seiten 6, 8,40).
[Sch+08] O. Schwaneberg, N. Jung und D. Reinert. “Apparatus For Authenticating A PersonOn The Basis Of At Least One Biometric Parameter”. Pat. EP Patent EP2137671A2, U.S. Patent US8058616 B2, WO Patent WO2008125491 A3. 2008 (zitiertauf Seite 5).
[Sch+12] O. Schwaneberg, H. Steiner, P. H. Bolıvar und N. Jung. “Design of an LED-basedsensor system to distinguish human skin from workpieces in safety applications”.In: Applied optics 51.12 (2012), S. 1865–1871 (zitiert auf Seite 6).
[Sch+10] O. Schwaneberg, H. Steiner, N. Jung und D. Reinert. “Push-buttons with MaterialClassification based on Spectral Signatures”. In: Safety of Industrial AutomatedSystems - SIAS 2010, 6th Int. Conf. Tampere Hall, Finnland, 2010 (zitiert aufSeite 5).
[Smi02] S. W. Smith. Digital signal processing: a practical guide for engineers and scientists.Newnes, 2002 (zitiert auf Seiten 15–17, 19, 21).
[Sta13] Reseach Systems Stanford. MODEL SR530 LOCK-IN AMPLIFIER. Rev. 2.4.Stanford Research Systems. 1290-D Reamwood Avenue Sunnyvale, CA 94089U.S.A., Nov. 2013 (zitiert auf Seite 24).
[Ste16] H. Steiner. “Active Multispectral SWIR Imaging for Reliable Skin Detection andFace Verification”. Eingereicht Juni 2016. Diss. University of Siegen, 2016 (zitiertauf Seiten 6, 8).
[Ste+12] H. Steiner, O. Schwaneberg, S. Sporrer, J. Konrad und N. Jung. “Spectral LightCurtains-Novel Near-Infrared Sensor System for Production Machines”. In: Safetyof Industrial Automated Systems - SIAS 2012, 7th Int. Conf. Montreal, Quebec,2012 (zitiert auf Seite 5).
[STM13] STM. AN2834 - How to get the best ADC accuracy in STM32Fx Series andSTM32L1 Series devices. 2013 (zitiert auf Seite 38).
[Tie+02] U. Tietze und C. Schenk. Halbleiter-Schaltungstechnik, 12. Auflage. Springer-Verlag, 2002 (zitiert auf Seiten 15, 16, 20).
[Tro+01] T. L. Troy und S. N. Thennadil. “Optical properties of human skin in the nearinfrared wavelength range of 1000 to 2200 nm”. In: Journal of biomedical optics6.2 (2001), S. 167–176 (zitiert auf Seite 7).
[Ue14] Deutsche gesetzliche Unfallversichung e.V. DGUV-Statistik fur die Praxis 2014.2014 (zitiert auf Seite 1).
76

A Anhang
A.1 Visualisierungen realer Messdaten
Alle in dieser Arbeit beschriebenen Effekte konnten mithilfe der Messdaten belegt werden.Aus Grunden der Vollstandigkeit sind im Folgenden einige reale Messdaten des Sensorsystemsdargestellt.
Messdaten von Haut und Holz
Abbildung A.1 zeigt typische Messdaten von Haut- bzw. Holzmessungen im Zeit- und Frequenz-bereich. Wahrend im Zeitbereich eine Interpretation der Remissionsinformationen schwierigist, sind im Frequenzbereich die drei Tragersignale deutlich erkennbar. Anhand den Abbildun-gen ist ersichtlich, dass das gemessene Tragersignal fur 1550 nm (f1550 nm = 13 kHz) bei denHautmessungen signifikant schwacher ist, da diese Wellenlange stark absorbiert wird.
-15000
-10000
-5000
0
5000
10000
15000
20000
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Val
ue
Time (ms)
(a) Hautmessung - Zeitbereich
0
500
1000
1500
2000
2500
3000
3500
4000
4500
0 10 20 30 40 50 60 70 80 90 100
Mag
nitude
(raw
)
Frequency (kHz)
(b) Hautmessung - Frequenzbereich
-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
50000
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Val
ue
Time (ms)
(c) Holzmessung - Zeitbereich
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
0 10 20 30 40 50 60 70 80 90 100
Mag
nitude
(raw
)
Frequency (kHz)
(d) Holzmessung - Frequenzbereich
Abbildung A.1: Typische Messdaten von Holz und Haut bei 20 cm Messabstand
77

A Anhang
Vorverarbeitung
In Kapitel 5.2.1 wurde die (optionale) Vorverarbeitung der Messdaten beschrieben, mit der dieDatenmenge reduziert werden kann. Wie dort ausgefuhrt, zeigte der eingesetzte IIR-Filter einEinschwingverhalten, dessen Auswirkungen in Abbildung A.2 dargestellt ist.
0
500
1000
1500
2000
2500
3000
3500
4000
4500
0 10 20 30 40 50
Mag
nitude
Frequency (kHz)
(a) Keine Spiegelung
0
500
1000
1500
2000
2500
3000
3500
4000
4500
0 10 20 30 40 50
Mag
nitude
Frequency (kHz)
(b) Spiegelung von zehn Messwerten
Abbildung A.2: Vorverarbeitung (Halbierung der Messdaten): Einschwingverhaltens des IIR-Filters
Leckeffekte
Wenn die Tragersignalfrequenzen nicht auf der diskreten Frequenzauflosung liegen, so entstehendie in Kapitel 3.2.3 beschriebenen Leck-Effekte im Messsignal. Abbildung A.3 zeigt ein Beispieleines solchen Leck-Effekts, welcher Aufgrund falscher Parameterwahl entstanden ist. Die falschgewahlten Parameter konnen der Bildunterschrift entnommen werden.
0
1000
2000
3000
4000
5000
6000
7000
8000
0 10 20 30 40 50 60 70 80 90 100
Mag
nitude
Frequency (kHz)
Abbildung A.3: Beispiel eines Leck-Effekts bei falscher Parameterauswahl(fs = 200 kHz, Nw = 250, fmi = 10 kHz, 13 kHz, 16 kHz)
78

A Anhang
Schwebungen
Die in Kapitel 3.3.3 simulierten Schwebungseffekte ließen sich auch in dem Sensorsystembeobachten. Abbildung A.4 zeigt dieses Verhalten anhand realer Messdaten und nennt die dafurverwendeten Parameter.
-50000
-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
50000
60000
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Val
ue
Time (ms)
(a) Zeitbereich
0
2000
4000
6000
8000
10000
12000
0 10 20 30 40 50 60 70 80 90 100
Mag
nitude
Frequency (kHz)
(b) Frequenzbereich
Abbildung A.4: Schwebungsbeispiel mit realen Messdaten(fs = 200 kHz, Nw = 400, fmi = 13 kHz, 14 kHz, 15 kHz)
A.2 Laufzeitmessung (Time-of-Flight)
Das Messen von Distanzen uber eine Laufzeitmessung ist in dem aktuellen Sensorsystemnicht anwendbar. Dennoch sollen an dieser Stelle die Anforderungen an ein (multispektrales)Sensorsystem abgeschatzt werden, um eine intrinsische Distanzmessung durchfuhren zu konnen.
Um die Laufzeit zu berechnen, wird die Phasenverschiebung (∆ϕ) zwischen Trager- und Messsi-gnal benotigt. Die Tragersignale werden in dem aktuellen Sensordesign unabhangig erzeugt undsind mit dem Messsignal nicht synchronisiert. Daher existiert immer eine zusatzliche unbekanntePhasenverschiebung zwischen diesen beiden Signalen, die sich theoretisch bei jedem erneutenMessstart verandern kann. Somit ist eine wichtige Voraussetzung, dass die Phasenverschie-bung zwischen den beiden Signalen bestimmbar wird, indem z. B. die Tragersignale ebenfallsquantisiert oder direkt als Referenzsignale verwendet werden.
Die meisten ToF-Systeme verwenden die”four-bucket“-Technik. Hierbei wird eine viermal so
hohe Abtastrate wie die Modulationsfrequenz verwendet, damit in jeder Periode des Tragersignalsgenau vier Messpunkte entstehen (m0,m1,m2 und m3). Anhand dieser vier Messpunkte kanndann die Phasenverschiebung
∆ϕ = arctan(m3 −m1
m0 −m2
),
der Offset
B =m0 +m1 +m2 +m3
4
79

A Anhang
und die Amplitude
A =
√(m3 −m1)2 + (m0 −m2)2
2
berechnet werden. [Foi+11]
Da die meisten ToF-Systeme eine Frequenzmodulation verwenden, ist es prinzipiell moglich,mehrere solcher Systeme in der gleichen Arbeitsumgebung einzusetzen, solange keine Interfe-renzen zwischen verwendeten Modulationsfrequenzen auftreten. Die
”four-bucket“-Abtastung
ist jedoch im Allgemeinen in einem multispektralen System nicht anwendbar, da die Abtastratenur von einer Modulationsfrequenz abhangig gemacht werden kann. Dennoch konnte die Phaseuber eine gewohnliche Lock-In-Detektion, wie sie in dieser Arbeit bereits beschrieben wurde,ermittelt werden.
Mit der Phasenverschiebung zwischen Trager- und Messsignal kann die Distanz zum Messobjektberechnet werden:
D = L∆ϕ
2π
wobei L die maximale Distanz fur eine eindeutige Umrechnung darstellt. Diese maximaleDistanz wird durch die Ausbreitungsgeschwindigkeit (Vakuum-Lichtgeschwindigkeit c0) und derModulationsfrequenz (fm) bestimmt:
L =c0
2fm
Ein zusatzlicher Faktor (2) berucksichtigt die doppelte Wegstrecke (d. h. Hin- und Ruckweg)des Tragersignals. [Foi+11]
Die berechnete Phasenverschiebung liegt innerhalb einer Periode (d. h. in dem Intervall [0, 2π]).Eine Phasenverschiebung, die großer als eine Periode ist, kann nicht einwandfrei erkanntwerden und wird auf dieses Intervall abgebildet. Sofern dies nicht systemtechnisch gewollt ist,sollte deshalb die Phasenverschiebung eine Periode nicht uberschreiten, damit eine eindeutigeZuordnung moglich bleibt. Die maximale Reichweite der Distanzmessung ist daher umgekehrtproportional zu der Modulationsfrequenz. Bei einer Reichweite von L = 1 m wird deswegenbereits eine Modulationsfrequenz von 150 MHz benotigt. Das verwendete Sensorsystem hatModulationsfrequenzen im zweistelligen kHz-Bereich und eine Abtastrate von maximal 1 MHz,daher sind die ToF-Prinzipien aus praktischen Grunden nicht anwendbar.
A.3 Details zur Desktop-Software
Die folgenden Abschnitte zeigen einige Screenshots der im Rahmen dieser Arbeit entwickeltenDesktop-Software und geben eine Kurzbeschreibung der Funktionalitaten.
MainWindow
Das MainWindow ist die Ansicht bei Softwarestart und ist in Abbildung A.5 dargestellt. Dieverschiedenen GUI-Elemente wurden gruppiert angeordnet, sodass eine intuitive Bedienung
80

A Anhang
moglich ist. Der untere Rand zeigt ein Statusfenster, indem alle ankommenden Pakete undaufgetretenen Fehler mit einem Zeitstempel protokolliert werden.
Abbildung A.5: Desktop Software: MainWindow
In der linken Spalte sind oben die Auswahl des seriellen COM-Ports und die Buttons fur dasAktualisieren der COM-Port-Liste und zum Verbinden bzw. Trennen der Verbindung zu sehen.Darunter konnen die Sensormessungen im sogenannten Freerun-Modus gestartet werden, beidem der Sensor solange Messdaten sendet, bis er ein Stop-Signal erhalt. Ganz unten wirdStatus (z. B. Laufzeit und Softwareversion) von Sensor und Desktop-Software angezeigt.
Die mittlere Spalte stellt die Sensor-Konfiguration dar, in der unter anderem die Quantisie-rungsparameter und die Modulationsfrequenzen eingestellt werden konnen. Der Get-Buttonaktualisiert die Felder mit der aktuellen Konfiguration auf dem Sensor und der Set-Buttonsendet die Konfiguration an den Sensor. Mit dem Write-Button schreibt der Sensor seineaktuelle Konfiguration in seinen persistenten Flash-Speicher, sodass die neue Konfiguration beiSystemstart wieder verfugbar ist.
Auf der rechten Seite befindet sich die Konfiguration der digitalen Signalverarbeitungskette.Dort kann die (optionale) Vorverarbeitung ausgewahlt, der Lock-In-Verstarker eingestellt,die Sensorkalibration aktiviert und ein Merkmalsraum fur die Materialklassifikation selektiertwerden.
81

A Anhang
Visualisierungen
Es wurden insgesamt vier verschiedene Visualisierungen implementiert, um die Sensormessungenzu analysieren. Alle Visualisierungen sind dabei so ausgelegt, dass eine Echtzeitbetrachtungmoglich ist.
Eine nicht grafische Darstellung ist der Text Plot, welcher in Abbildung A.6 zu sehen ist. Indiesem konnen die Meta-Informationen der Messung (Abbildung A.6a), die rohen Messdaten(nicht dargestellt) oder die komplette Signalverarbeitungskette (Abbildung A.6b) in Textformangezeigt werden. Gerade im Anfangsstadium der Entwicklung kann eine solche Darstellungsformsehr hilfreich sein.
(a) Meta-Informationen der Messung (b) Signalverarbeitungskette
Abbildung A.6: Desktop Software: Text Plot
Da der Lock-In-Verstarker ein frequenzbasiertes Verfahren ist, wurden Visualisierungen imple-mentiert, die Messungen sowohl im Zeitbereich als auch im Frequenzbereich darstellen konnen.Der Time Plot (Abbildung A.7) zeigt die Messwerte innerhalb der eingestellten Fenstergroße.Da die drei Tragersignale sich im normalen Betrieb uberlagern, ist diese Darstellungsform furden Menschen schwer interpretierbar.
Der FFT Plot (Abbildung A.8) hingegen zeigt den Frequenzbereich - hier sind die einzelnenSignalanteile deutlich zu erkennen. Da die LEDs mit Rechtecksignalen moduliert werden, sindneben den Hauptwellen auch die Oberwellen der einzelnen Tragersignale zu sehen.
Der Time Plot und der FFT Plot haben weitere Ansichten, die sowohl das aktuelle Referenzsignalwie auch die Inphase- und Quadratursignale im Zeit- bzw. Frequenzbereich darstellen konnen.Diese sind an dieser Stelle jedoch nicht abgebildet.
82

A Anhang
Abbildung A.7: Desktop Software: Hautmessung im Zeitbereich (Time Plot)
Abbildung A.8: Desktop Software: Hautmessung im Frequenzbereich (FFT Plot)
Die komplette Signalverarbeitungskette wird im Signal Chain Plot visualisiert. Abbildung A.9zeigt hierzu die Sensorkalibrationen.
Abbildung A.10 zeigt alle vom Lock-In-Verstarker berechneten Werte. Fur die Inphase-Komponente(I), die Quadratur-Komponente (Q) und dem Betrag (M) werden einfache Balkendiagrammeverwendet. In der Echtzeitansicht ist zu erkennen, wie die Quadratur-Komponente der Inphase-Komponente folgt, wahrend der Betrag sich nicht verandert. Die Phasenverschiebung wird mitZeigerdiagrammen angezeigt, deren Zeiger sich mit konstanten Winkelgeschwindigkeiten imKreis drehen.
In einer weiteren nicht abgebildeten Seite des Signal Chain Plot wird fur jeden der Messpunktedas Ergebnis der Materialklassifikation anhand von drei verschiedenen Grafiken dargestellt(Haut, Material, kein Signal).
83

A Anhang
Abbildung A.9: Desktop Software: Sensorkalibration (Signal Chain Plot)
Abbildung A.10: Desktop Software: Lock-In-Verstarker (Signal Chain Plot)
84
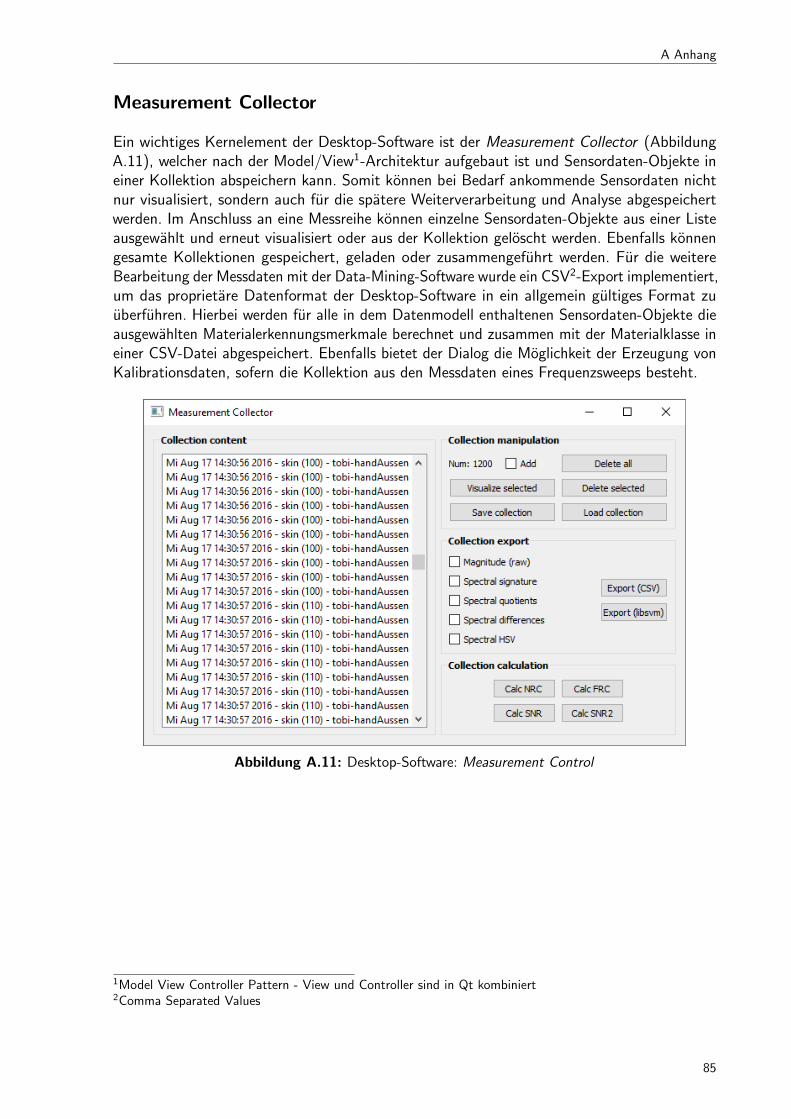
A Anhang
Measurement Collector
Ein wichtiges Kernelement der Desktop-Software ist der Measurement Collector (AbbildungA.11), welcher nach der Model/View1-Architektur aufgebaut ist und Sensordaten-Objekte ineiner Kollektion abspeichern kann. Somit konnen bei Bedarf ankommende Sensordaten nichtnur visualisiert, sondern auch fur die spatere Weiterverarbeitung und Analyse abgespeichertwerden. Im Anschluss an eine Messreihe konnen einzelne Sensordaten-Objekte aus einer Listeausgewahlt und erneut visualisiert oder aus der Kollektion geloscht werden. Ebenfalls konnengesamte Kollektionen gespeichert, geladen oder zusammengefuhrt werden. Fur die weitereBearbeitung der Messdaten mit der Data-Mining-Software wurde ein CSV2-Export implementiert,um das proprietare Datenformat der Desktop-Software in ein allgemein gultiges Format zuuberfuhren. Hierbei werden fur alle in dem Datenmodell enthaltenen Sensordaten-Objekte dieausgewahlten Materialerkennungsmerkmale berechnet und zusammen mit der Materialklasse ineiner CSV-Datei abgespeichert. Ebenfalls bietet der Dialog die Moglichkeit der Erzeugung vonKalibrationsdaten, sofern die Kollektion aus den Messdaten eines Frequenzsweeps besteht.
Abbildung A.11: Desktop-Software: Measurement Control
1Model View Controller Pattern - View und Controller sind in Qt kombiniert2Comma Separated Values
85

A Anhang
Measurement Control
Eine sinnvolle Evaluation ist ohne die systematische Erzeugung großer Mengen von Messdatennicht sinnvoll durchfuhrbar. Daher wurde mit der Implementierung der Measurement Control(Abbildung A.12) ein Werkzeug realisiert, welches eine einfache Automatisierung und Kontrolleder Messvorgange und Sensorkonfiguration bietet. Es ist moglich, einzelne Messungen aufzu-nehmen, Frequenzsweeps durchzufuhren oder Messreihen auf dem Linearantrieb zu steuern.Um die grafische Benutzeroberflache nicht unnotig zu blockieren, lauft die Automatisierung ineinem eigenen Thread.
Abbildung A.12: Desktop-Software: Measurement Collector
86

A Anhang
A.4 Vergleich der Materialerkennungsmerkmalsraume
Merkmal ACC FNR FPR PREC Baumgroße
Betrage 0,999913 0,000042 0,000136 0,999875 21Quotienten 0,999978 0,000000 0,000045 0,999958 3Norm. Differenzen 0,999935 0,000000 0,000136 0,999875 3Norm. Signatur 0,999935 0,000125 0,000000 1,000000 3Quotienten 0,999935 0,000000 0,000136 0,999875 3
Tabelle A.1: PD 1 - Vergleich der Materialerkennungsmerkmalsraume
Merkmal ACC FNR FPR PREC Baumgroße
Betrage 0,999892 0,000167 0,000045 0,999958 17Quotienten 0,999978 0,000000 0,000045 0,999958 3Norm. Differenzen 0,999978 0,000000 0,000045 0,999958 3Norm. Signatur 0,999978 0,000042 0,000000 1,000000 3HSV 0,999978 0,000000 0,000045 0,999958 3
Tabelle A.2: PD 2 - Vergleich der Materialerkennungsmerkmalsraume
Merkmal ACC FNR FPR PREC Baumgroße
Betrage 0,999957 0,000042 0,000045 0,999958 21Quotienten 0,999978 0,000000 0,000045 0,999958 3Norm. Differenzen 0,999978 0,000000 0,000045 0,999958 3Norm. Signatur 0,999957 0,000083 0,000000 1,000000 3HSV 0,999978 0,000000 0,000045 0,999958 3
Tabelle A.3: PD 3 - Vergleich der Materialerkennungsmerkmalsraume
Merkmal ACC FNR FPR PREC Baumgroße
Betrage 0,999913 0,000083 0,000090 0,999917 21Quotienten 0,999978 0,000000 0,000045 0,999958 3Norm. Differenzen 0,999978 0,000000 0,000045 0,999958 3Norm. Signatur 0,999978 0,000042 0,000000 1,000000 3HSV 0,999978 0,000000 0,000045 0,999958 3
Tabelle A.4: PD 4 - Vergleich der Materialerkennungsmerkmalsraume
87


B Digitaler Anhang
Die digitalen Anhange zu dieser Arbeit sind auf der beiliegenden CD zu finden. Der nachfolgendenAbbildung kann die Ordnerstruktur entnommen werden.
/
Code/ ................................................ der Programmcode
Embedded-SW/
Desktop-SW/
libLoki/
Messdaten/ ................................. Messdaten des Sensorsystems
LaTeX/ ................................... Quelltext fur Expose und Thesis
Quellen/ .................................. PDFs der verwendeten Quellen
Expose.pdf
Thesis online.pdf ................... Online Version (mit farbigen Links)
Thesis print.pdf ....................................... Druck Version
89


C Eidesstattliche Erklarung
Tobias ScheerKronprinzenstr. 3453773 Hennef
Hiermit erklare ich an Eides statt, dass ich die vorliegende Arbeit selbst angefertigt habe; dieaus fremden Quellen direkt oder indirekt ubernommenen Gedanken sind als solche kenntlichgemacht.
Die Arbeit wurde bisher keiner Prufungsbehorde vorgelegt und auch noch nicht veroffentlicht.
Hennef, den 13. Oktober 2016
(Ort, Datum, Unterschrift)
91
