konstrukcje metalowe wykład iii geometria przekrojufootbridge.pl/stud/z/sn1/kbi/w103.pdf ·...
TRANSCRIPT

Konstrukcje metalowe
Wykład III
Geometria przekroju
Spis treści
Podstawowe charakterystyki geometrycznerarr t 3
Zaawansowane charakterystyki geometrycznerarr t 27
Przykład obliczeniowy rarr t 58
Zagadnienia egzaminacyjne rarr t 88
Podstawowe charakterystyki geometryczne
Rys Autor
Pole powierzchni [m2]
A = int int dz dy
y0
z0
Rys Autor
Moment statyczny [m3]
Sy = int int z dz dy
Sz = int int y dz dy
y0
z0
y1
z1
∆z
∆y
CoG
Sy = Sz = 0 gdy osie przechodzą przez środek
ciężkości
∆y = Sz A
∆z = Sy A
Dyz = 0 dla osi głoacutewnych centralnych
Jy = (Jy1 + Jz1) + radic[(Jy1 - Jz1)2 + 4 Dy1z1
2 ] 2
Jz = (Jy1 + Jz1) - radic[(Jy1 - Jz1)2 + 4 Dy1z1
2 ] 2
tg α = Dy1z1 (Jy1 - Jy)
Rys Autor
Moment bezwładności [m4]
Jy = int int z2 dz dy
Jz = int int y2 dz dy
Moment dewiacji [m4]
Dyz = int int y z dz dy
y1
z1 z
y
α
Wskaźnik wytrzymałości przekroju [m3]
Wy top = Jy | zmax top|
Wy bottom = Jy | zmax bottom|
Wz left = Jy | ymax left|
Wz right = Jy | ymax right|
Dla przekroju bisymetrycznego
Wy top = Wy bottom = Wy
Wz left = Wz right = Wz
Promień bezwładności [m]
iy = radic (Jy A)
iz = radic (Jz A)
Rys Autor
y
z
ymax left
ymax right
zmax top
zmax bottom
Charakterystyki geometryczne ndash przekroacutej prostokątny
A = b h
Jy = b h3 12
Wy = Jy zmax = Jy (05h) = b h2 6
iy = radic (Jy A) = h (2 radic 3)
Rys Autor
Wskaźnik wytrzymałości przekroju
Wy top = Jy | zmax top|
Wy bottom = Jy | zmax bottom|
Dlaczego jest taki ważny
Naprężenia w zakresie sprężystym
Rys Autor
y
z
bull naprężenia zmieniają się wzdłuż osi z
σ (y z) = σ (z)
bull z = 0 rarr σ = 0
bull σ (zmax) = σ (ztop) = σtop
bull jest to funkcja liniowaσ (z)
σ(z) = σtop (z ztop)
σ (ztop) = σtop
σ (0) = 0
σ (0) = 0
σ (zbottom) = σbottom lt σtop
z
Wypadkowa siła osiowa
σ(z) = σtop (z ztop)
N = int int [σ(z)] dz dy = int int [σtop (z ztop)] dz dy = (σtop ztop) int int z dz dy =
= t 4 Sy = int int z dz dy śc Sy = 0 = (σtop ztop) 0 = 0
Wypadkowy moment zginający
σ(z) = σtop (z ztop)
My =-int int z [σ(z)] dz dy = int int z [σtop (z ztop)] dz dy =
= (σtop ztop) int int (z2) dz dy =
= t 5 Jy = int int z2 dz dy = (σtop ztop) Jy =
= t 6 Wy top = Jy | z top| = σtop Wy top
My = σmax Wy max
My max = fy Wy max
Jaka jest najlepsza geometria przekroju gdy mamy do
czynienia z następującymi ograniczeniami
A rarr jak najmniejsze (mała masa własna)
Wy rarr jak największe (duża nośność przekroju na
zginanie)
h rarr ograniczone
Na przykład
A = 2 a2
h le 3a
Rys Autor
b = 2a h = a
Jy = b h3 12 = 0167 a4
Wy = b h2 6 = 0333 a3
iy = radic (Jy A) = 0289 a
My max = 0333 a3 fy
Rys Autor
b = a h = 2a
Jy = b h3 12 = 0667 a4
Wy = b h2 6 = 0667 a3
iy = radic (Jy A) = 0577 a
My max = 0667 a3 fy
Rys Autor
b = 2 a 3 h = 3 a
Jy = b h3 12 = 1500 a4
Wy = b h2 6 = 1000 a3
iy = radic (Jy A) = 0866 a
My max = 1000 a3 fy
Rys Autor
Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Spis treści
Podstawowe charakterystyki geometrycznerarr t 3
Zaawansowane charakterystyki geometrycznerarr t 27
Przykład obliczeniowy rarr t 58
Zagadnienia egzaminacyjne rarr t 88
Podstawowe charakterystyki geometryczne
Rys Autor
Pole powierzchni [m2]
A = int int dz dy
y0
z0
Rys Autor
Moment statyczny [m3]
Sy = int int z dz dy
Sz = int int y dz dy
y0
z0
y1
z1
∆z
∆y
CoG
Sy = Sz = 0 gdy osie przechodzą przez środek
ciężkości
∆y = Sz A
∆z = Sy A
Dyz = 0 dla osi głoacutewnych centralnych
Jy = (Jy1 + Jz1) + radic[(Jy1 - Jz1)2 + 4 Dy1z1
2 ] 2
Jz = (Jy1 + Jz1) - radic[(Jy1 - Jz1)2 + 4 Dy1z1
2 ] 2
tg α = Dy1z1 (Jy1 - Jy)
Rys Autor
Moment bezwładności [m4]
Jy = int int z2 dz dy
Jz = int int y2 dz dy
Moment dewiacji [m4]
Dyz = int int y z dz dy
y1
z1 z
y
α
Wskaźnik wytrzymałości przekroju [m3]
Wy top = Jy | zmax top|
Wy bottom = Jy | zmax bottom|
Wz left = Jy | ymax left|
Wz right = Jy | ymax right|
Dla przekroju bisymetrycznego
Wy top = Wy bottom = Wy
Wz left = Wz right = Wz
Promień bezwładności [m]
iy = radic (Jy A)
iz = radic (Jz A)
Rys Autor
y
z
ymax left
ymax right
zmax top
zmax bottom
Charakterystyki geometryczne ndash przekroacutej prostokątny
A = b h
Jy = b h3 12
Wy = Jy zmax = Jy (05h) = b h2 6
iy = radic (Jy A) = h (2 radic 3)
Rys Autor
Wskaźnik wytrzymałości przekroju
Wy top = Jy | zmax top|
Wy bottom = Jy | zmax bottom|
Dlaczego jest taki ważny
Naprężenia w zakresie sprężystym
Rys Autor
y
z
bull naprężenia zmieniają się wzdłuż osi z
σ (y z) = σ (z)
bull z = 0 rarr σ = 0
bull σ (zmax) = σ (ztop) = σtop
bull jest to funkcja liniowaσ (z)
σ(z) = σtop (z ztop)
σ (ztop) = σtop
σ (0) = 0
σ (0) = 0
σ (zbottom) = σbottom lt σtop
z
Wypadkowa siła osiowa
σ(z) = σtop (z ztop)
N = int int [σ(z)] dz dy = int int [σtop (z ztop)] dz dy = (σtop ztop) int int z dz dy =
= t 4 Sy = int int z dz dy śc Sy = 0 = (σtop ztop) 0 = 0
Wypadkowy moment zginający
σ(z) = σtop (z ztop)
My =-int int z [σ(z)] dz dy = int int z [σtop (z ztop)] dz dy =
= (σtop ztop) int int (z2) dz dy =
= t 5 Jy = int int z2 dz dy = (σtop ztop) Jy =
= t 6 Wy top = Jy | z top| = σtop Wy top
My = σmax Wy max
My max = fy Wy max
Jaka jest najlepsza geometria przekroju gdy mamy do
czynienia z następującymi ograniczeniami
A rarr jak najmniejsze (mała masa własna)
Wy rarr jak największe (duża nośność przekroju na
zginanie)
h rarr ograniczone
Na przykład
A = 2 a2
h le 3a
Rys Autor
b = 2a h = a
Jy = b h3 12 = 0167 a4
Wy = b h2 6 = 0333 a3
iy = radic (Jy A) = 0289 a
My max = 0333 a3 fy
Rys Autor
b = a h = 2a
Jy = b h3 12 = 0667 a4
Wy = b h2 6 = 0667 a3
iy = radic (Jy A) = 0577 a
My max = 0667 a3 fy
Rys Autor
b = 2 a 3 h = 3 a
Jy = b h3 12 = 1500 a4
Wy = b h2 6 = 1000 a3
iy = radic (Jy A) = 0866 a
My max = 1000 a3 fy
Rys Autor
Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Podstawowe charakterystyki geometryczne
Rys Autor
Pole powierzchni [m2]
A = int int dz dy
y0
z0
Rys Autor
Moment statyczny [m3]
Sy = int int z dz dy
Sz = int int y dz dy
y0
z0
y1
z1
∆z
∆y
CoG
Sy = Sz = 0 gdy osie przechodzą przez środek
ciężkości
∆y = Sz A
∆z = Sy A
Dyz = 0 dla osi głoacutewnych centralnych
Jy = (Jy1 + Jz1) + radic[(Jy1 - Jz1)2 + 4 Dy1z1
2 ] 2
Jz = (Jy1 + Jz1) - radic[(Jy1 - Jz1)2 + 4 Dy1z1
2 ] 2
tg α = Dy1z1 (Jy1 - Jy)
Rys Autor
Moment bezwładności [m4]
Jy = int int z2 dz dy
Jz = int int y2 dz dy
Moment dewiacji [m4]
Dyz = int int y z dz dy
y1
z1 z
y
α
Wskaźnik wytrzymałości przekroju [m3]
Wy top = Jy | zmax top|
Wy bottom = Jy | zmax bottom|
Wz left = Jy | ymax left|
Wz right = Jy | ymax right|
Dla przekroju bisymetrycznego
Wy top = Wy bottom = Wy
Wz left = Wz right = Wz
Promień bezwładności [m]
iy = radic (Jy A)
iz = radic (Jz A)
Rys Autor
y
z
ymax left
ymax right
zmax top
zmax bottom
Charakterystyki geometryczne ndash przekroacutej prostokątny
A = b h
Jy = b h3 12
Wy = Jy zmax = Jy (05h) = b h2 6
iy = radic (Jy A) = h (2 radic 3)
Rys Autor
Wskaźnik wytrzymałości przekroju
Wy top = Jy | zmax top|
Wy bottom = Jy | zmax bottom|
Dlaczego jest taki ważny
Naprężenia w zakresie sprężystym
Rys Autor
y
z
bull naprężenia zmieniają się wzdłuż osi z
σ (y z) = σ (z)
bull z = 0 rarr σ = 0
bull σ (zmax) = σ (ztop) = σtop
bull jest to funkcja liniowaσ (z)
σ(z) = σtop (z ztop)
σ (ztop) = σtop
σ (0) = 0
σ (0) = 0
σ (zbottom) = σbottom lt σtop
z
Wypadkowa siła osiowa
σ(z) = σtop (z ztop)
N = int int [σ(z)] dz dy = int int [σtop (z ztop)] dz dy = (σtop ztop) int int z dz dy =
= t 4 Sy = int int z dz dy śc Sy = 0 = (σtop ztop) 0 = 0
Wypadkowy moment zginający
σ(z) = σtop (z ztop)
My =-int int z [σ(z)] dz dy = int int z [σtop (z ztop)] dz dy =
= (σtop ztop) int int (z2) dz dy =
= t 5 Jy = int int z2 dz dy = (σtop ztop) Jy =
= t 6 Wy top = Jy | z top| = σtop Wy top
My = σmax Wy max
My max = fy Wy max
Jaka jest najlepsza geometria przekroju gdy mamy do
czynienia z następującymi ograniczeniami
A rarr jak najmniejsze (mała masa własna)
Wy rarr jak największe (duża nośność przekroju na
zginanie)
h rarr ograniczone
Na przykład
A = 2 a2
h le 3a
Rys Autor
b = 2a h = a
Jy = b h3 12 = 0167 a4
Wy = b h2 6 = 0333 a3
iy = radic (Jy A) = 0289 a
My max = 0333 a3 fy
Rys Autor
b = a h = 2a
Jy = b h3 12 = 0667 a4
Wy = b h2 6 = 0667 a3
iy = radic (Jy A) = 0577 a
My max = 0667 a3 fy
Rys Autor
b = 2 a 3 h = 3 a
Jy = b h3 12 = 1500 a4
Wy = b h2 6 = 1000 a3
iy = radic (Jy A) = 0866 a
My max = 1000 a3 fy
Rys Autor
Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Rys Autor
Moment statyczny [m3]
Sy = int int z dz dy
Sz = int int y dz dy
y0
z0
y1
z1
∆z
∆y
CoG
Sy = Sz = 0 gdy osie przechodzą przez środek
ciężkości
∆y = Sz A
∆z = Sy A
Dyz = 0 dla osi głoacutewnych centralnych
Jy = (Jy1 + Jz1) + radic[(Jy1 - Jz1)2 + 4 Dy1z1
2 ] 2
Jz = (Jy1 + Jz1) - radic[(Jy1 - Jz1)2 + 4 Dy1z1
2 ] 2
tg α = Dy1z1 (Jy1 - Jy)
Rys Autor
Moment bezwładności [m4]
Jy = int int z2 dz dy
Jz = int int y2 dz dy
Moment dewiacji [m4]
Dyz = int int y z dz dy
y1
z1 z
y
α
Wskaźnik wytrzymałości przekroju [m3]
Wy top = Jy | zmax top|
Wy bottom = Jy | zmax bottom|
Wz left = Jy | ymax left|
Wz right = Jy | ymax right|
Dla przekroju bisymetrycznego
Wy top = Wy bottom = Wy
Wz left = Wz right = Wz
Promień bezwładności [m]
iy = radic (Jy A)
iz = radic (Jz A)
Rys Autor
y
z
ymax left
ymax right
zmax top
zmax bottom
Charakterystyki geometryczne ndash przekroacutej prostokątny
A = b h
Jy = b h3 12
Wy = Jy zmax = Jy (05h) = b h2 6
iy = radic (Jy A) = h (2 radic 3)
Rys Autor
Wskaźnik wytrzymałości przekroju
Wy top = Jy | zmax top|
Wy bottom = Jy | zmax bottom|
Dlaczego jest taki ważny
Naprężenia w zakresie sprężystym
Rys Autor
y
z
bull naprężenia zmieniają się wzdłuż osi z
σ (y z) = σ (z)
bull z = 0 rarr σ = 0
bull σ (zmax) = σ (ztop) = σtop
bull jest to funkcja liniowaσ (z)
σ(z) = σtop (z ztop)
σ (ztop) = σtop
σ (0) = 0
σ (0) = 0
σ (zbottom) = σbottom lt σtop
z
Wypadkowa siła osiowa
σ(z) = σtop (z ztop)
N = int int [σ(z)] dz dy = int int [σtop (z ztop)] dz dy = (σtop ztop) int int z dz dy =
= t 4 Sy = int int z dz dy śc Sy = 0 = (σtop ztop) 0 = 0
Wypadkowy moment zginający
σ(z) = σtop (z ztop)
My =-int int z [σ(z)] dz dy = int int z [σtop (z ztop)] dz dy =
= (σtop ztop) int int (z2) dz dy =
= t 5 Jy = int int z2 dz dy = (σtop ztop) Jy =
= t 6 Wy top = Jy | z top| = σtop Wy top
My = σmax Wy max
My max = fy Wy max
Jaka jest najlepsza geometria przekroju gdy mamy do
czynienia z następującymi ograniczeniami
A rarr jak najmniejsze (mała masa własna)
Wy rarr jak największe (duża nośność przekroju na
zginanie)
h rarr ograniczone
Na przykład
A = 2 a2
h le 3a
Rys Autor
b = 2a h = a
Jy = b h3 12 = 0167 a4
Wy = b h2 6 = 0333 a3
iy = radic (Jy A) = 0289 a
My max = 0333 a3 fy
Rys Autor
b = a h = 2a
Jy = b h3 12 = 0667 a4
Wy = b h2 6 = 0667 a3
iy = radic (Jy A) = 0577 a
My max = 0667 a3 fy
Rys Autor
b = 2 a 3 h = 3 a
Jy = b h3 12 = 1500 a4
Wy = b h2 6 = 1000 a3
iy = radic (Jy A) = 0866 a
My max = 1000 a3 fy
Rys Autor
Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Dyz = 0 dla osi głoacutewnych centralnych
Jy = (Jy1 + Jz1) + radic[(Jy1 - Jz1)2 + 4 Dy1z1
2 ] 2
Jz = (Jy1 + Jz1) - radic[(Jy1 - Jz1)2 + 4 Dy1z1
2 ] 2
tg α = Dy1z1 (Jy1 - Jy)
Rys Autor
Moment bezwładności [m4]
Jy = int int z2 dz dy
Jz = int int y2 dz dy
Moment dewiacji [m4]
Dyz = int int y z dz dy
y1
z1 z
y
α
Wskaźnik wytrzymałości przekroju [m3]
Wy top = Jy | zmax top|
Wy bottom = Jy | zmax bottom|
Wz left = Jy | ymax left|
Wz right = Jy | ymax right|
Dla przekroju bisymetrycznego
Wy top = Wy bottom = Wy
Wz left = Wz right = Wz
Promień bezwładności [m]
iy = radic (Jy A)
iz = radic (Jz A)
Rys Autor
y
z
ymax left
ymax right
zmax top
zmax bottom
Charakterystyki geometryczne ndash przekroacutej prostokątny
A = b h
Jy = b h3 12
Wy = Jy zmax = Jy (05h) = b h2 6
iy = radic (Jy A) = h (2 radic 3)
Rys Autor
Wskaźnik wytrzymałości przekroju
Wy top = Jy | zmax top|
Wy bottom = Jy | zmax bottom|
Dlaczego jest taki ważny
Naprężenia w zakresie sprężystym
Rys Autor
y
z
bull naprężenia zmieniają się wzdłuż osi z
σ (y z) = σ (z)
bull z = 0 rarr σ = 0
bull σ (zmax) = σ (ztop) = σtop
bull jest to funkcja liniowaσ (z)
σ(z) = σtop (z ztop)
σ (ztop) = σtop
σ (0) = 0
σ (0) = 0
σ (zbottom) = σbottom lt σtop
z
Wypadkowa siła osiowa
σ(z) = σtop (z ztop)
N = int int [σ(z)] dz dy = int int [σtop (z ztop)] dz dy = (σtop ztop) int int z dz dy =
= t 4 Sy = int int z dz dy śc Sy = 0 = (σtop ztop) 0 = 0
Wypadkowy moment zginający
σ(z) = σtop (z ztop)
My =-int int z [σ(z)] dz dy = int int z [σtop (z ztop)] dz dy =
= (σtop ztop) int int (z2) dz dy =
= t 5 Jy = int int z2 dz dy = (σtop ztop) Jy =
= t 6 Wy top = Jy | z top| = σtop Wy top
My = σmax Wy max
My max = fy Wy max
Jaka jest najlepsza geometria przekroju gdy mamy do
czynienia z następującymi ograniczeniami
A rarr jak najmniejsze (mała masa własna)
Wy rarr jak największe (duża nośność przekroju na
zginanie)
h rarr ograniczone
Na przykład
A = 2 a2
h le 3a
Rys Autor
b = 2a h = a
Jy = b h3 12 = 0167 a4
Wy = b h2 6 = 0333 a3
iy = radic (Jy A) = 0289 a
My max = 0333 a3 fy
Rys Autor
b = a h = 2a
Jy = b h3 12 = 0667 a4
Wy = b h2 6 = 0667 a3
iy = radic (Jy A) = 0577 a
My max = 0667 a3 fy
Rys Autor
b = 2 a 3 h = 3 a
Jy = b h3 12 = 1500 a4
Wy = b h2 6 = 1000 a3
iy = radic (Jy A) = 0866 a
My max = 1000 a3 fy
Rys Autor
Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Wskaźnik wytrzymałości przekroju [m3]
Wy top = Jy | zmax top|
Wy bottom = Jy | zmax bottom|
Wz left = Jy | ymax left|
Wz right = Jy | ymax right|
Dla przekroju bisymetrycznego
Wy top = Wy bottom = Wy
Wz left = Wz right = Wz
Promień bezwładności [m]
iy = radic (Jy A)
iz = radic (Jz A)
Rys Autor
y
z
ymax left
ymax right
zmax top
zmax bottom
Charakterystyki geometryczne ndash przekroacutej prostokątny
A = b h
Jy = b h3 12
Wy = Jy zmax = Jy (05h) = b h2 6
iy = radic (Jy A) = h (2 radic 3)
Rys Autor
Wskaźnik wytrzymałości przekroju
Wy top = Jy | zmax top|
Wy bottom = Jy | zmax bottom|
Dlaczego jest taki ważny
Naprężenia w zakresie sprężystym
Rys Autor
y
z
bull naprężenia zmieniają się wzdłuż osi z
σ (y z) = σ (z)
bull z = 0 rarr σ = 0
bull σ (zmax) = σ (ztop) = σtop
bull jest to funkcja liniowaσ (z)
σ(z) = σtop (z ztop)
σ (ztop) = σtop
σ (0) = 0
σ (0) = 0
σ (zbottom) = σbottom lt σtop
z
Wypadkowa siła osiowa
σ(z) = σtop (z ztop)
N = int int [σ(z)] dz dy = int int [σtop (z ztop)] dz dy = (σtop ztop) int int z dz dy =
= t 4 Sy = int int z dz dy śc Sy = 0 = (σtop ztop) 0 = 0
Wypadkowy moment zginający
σ(z) = σtop (z ztop)
My =-int int z [σ(z)] dz dy = int int z [σtop (z ztop)] dz dy =
= (σtop ztop) int int (z2) dz dy =
= t 5 Jy = int int z2 dz dy = (σtop ztop) Jy =
= t 6 Wy top = Jy | z top| = σtop Wy top
My = σmax Wy max
My max = fy Wy max
Jaka jest najlepsza geometria przekroju gdy mamy do
czynienia z następującymi ograniczeniami
A rarr jak najmniejsze (mała masa własna)
Wy rarr jak największe (duża nośność przekroju na
zginanie)
h rarr ograniczone
Na przykład
A = 2 a2
h le 3a
Rys Autor
b = 2a h = a
Jy = b h3 12 = 0167 a4
Wy = b h2 6 = 0333 a3
iy = radic (Jy A) = 0289 a
My max = 0333 a3 fy
Rys Autor
b = a h = 2a
Jy = b h3 12 = 0667 a4
Wy = b h2 6 = 0667 a3
iy = radic (Jy A) = 0577 a
My max = 0667 a3 fy
Rys Autor
b = 2 a 3 h = 3 a
Jy = b h3 12 = 1500 a4
Wy = b h2 6 = 1000 a3
iy = radic (Jy A) = 0866 a
My max = 1000 a3 fy
Rys Autor
Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Charakterystyki geometryczne ndash przekroacutej prostokątny
A = b h
Jy = b h3 12
Wy = Jy zmax = Jy (05h) = b h2 6
iy = radic (Jy A) = h (2 radic 3)
Rys Autor
Wskaźnik wytrzymałości przekroju
Wy top = Jy | zmax top|
Wy bottom = Jy | zmax bottom|
Dlaczego jest taki ważny
Naprężenia w zakresie sprężystym
Rys Autor
y
z
bull naprężenia zmieniają się wzdłuż osi z
σ (y z) = σ (z)
bull z = 0 rarr σ = 0
bull σ (zmax) = σ (ztop) = σtop
bull jest to funkcja liniowaσ (z)
σ(z) = σtop (z ztop)
σ (ztop) = σtop
σ (0) = 0
σ (0) = 0
σ (zbottom) = σbottom lt σtop
z
Wypadkowa siła osiowa
σ(z) = σtop (z ztop)
N = int int [σ(z)] dz dy = int int [σtop (z ztop)] dz dy = (σtop ztop) int int z dz dy =
= t 4 Sy = int int z dz dy śc Sy = 0 = (σtop ztop) 0 = 0
Wypadkowy moment zginający
σ(z) = σtop (z ztop)
My =-int int z [σ(z)] dz dy = int int z [σtop (z ztop)] dz dy =
= (σtop ztop) int int (z2) dz dy =
= t 5 Jy = int int z2 dz dy = (σtop ztop) Jy =
= t 6 Wy top = Jy | z top| = σtop Wy top
My = σmax Wy max
My max = fy Wy max
Jaka jest najlepsza geometria przekroju gdy mamy do
czynienia z następującymi ograniczeniami
A rarr jak najmniejsze (mała masa własna)
Wy rarr jak największe (duża nośność przekroju na
zginanie)
h rarr ograniczone
Na przykład
A = 2 a2
h le 3a
Rys Autor
b = 2a h = a
Jy = b h3 12 = 0167 a4
Wy = b h2 6 = 0333 a3
iy = radic (Jy A) = 0289 a
My max = 0333 a3 fy
Rys Autor
b = a h = 2a
Jy = b h3 12 = 0667 a4
Wy = b h2 6 = 0667 a3
iy = radic (Jy A) = 0577 a
My max = 0667 a3 fy
Rys Autor
b = 2 a 3 h = 3 a
Jy = b h3 12 = 1500 a4
Wy = b h2 6 = 1000 a3
iy = radic (Jy A) = 0866 a
My max = 1000 a3 fy
Rys Autor
Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Wskaźnik wytrzymałości przekroju
Wy top = Jy | zmax top|
Wy bottom = Jy | zmax bottom|
Dlaczego jest taki ważny
Naprężenia w zakresie sprężystym
Rys Autor
y
z
bull naprężenia zmieniają się wzdłuż osi z
σ (y z) = σ (z)
bull z = 0 rarr σ = 0
bull σ (zmax) = σ (ztop) = σtop
bull jest to funkcja liniowaσ (z)
σ(z) = σtop (z ztop)
σ (ztop) = σtop
σ (0) = 0
σ (0) = 0
σ (zbottom) = σbottom lt σtop
z
Wypadkowa siła osiowa
σ(z) = σtop (z ztop)
N = int int [σ(z)] dz dy = int int [σtop (z ztop)] dz dy = (σtop ztop) int int z dz dy =
= t 4 Sy = int int z dz dy śc Sy = 0 = (σtop ztop) 0 = 0
Wypadkowy moment zginający
σ(z) = σtop (z ztop)
My =-int int z [σ(z)] dz dy = int int z [σtop (z ztop)] dz dy =
= (σtop ztop) int int (z2) dz dy =
= t 5 Jy = int int z2 dz dy = (σtop ztop) Jy =
= t 6 Wy top = Jy | z top| = σtop Wy top
My = σmax Wy max
My max = fy Wy max
Jaka jest najlepsza geometria przekroju gdy mamy do
czynienia z następującymi ograniczeniami
A rarr jak najmniejsze (mała masa własna)
Wy rarr jak największe (duża nośność przekroju na
zginanie)
h rarr ograniczone
Na przykład
A = 2 a2
h le 3a
Rys Autor
b = 2a h = a
Jy = b h3 12 = 0167 a4
Wy = b h2 6 = 0333 a3
iy = radic (Jy A) = 0289 a
My max = 0333 a3 fy
Rys Autor
b = a h = 2a
Jy = b h3 12 = 0667 a4
Wy = b h2 6 = 0667 a3
iy = radic (Jy A) = 0577 a
My max = 0667 a3 fy
Rys Autor
b = 2 a 3 h = 3 a
Jy = b h3 12 = 1500 a4
Wy = b h2 6 = 1000 a3
iy = radic (Jy A) = 0866 a
My max = 1000 a3 fy
Rys Autor
Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Naprężenia w zakresie sprężystym
Rys Autor
y
z
bull naprężenia zmieniają się wzdłuż osi z
σ (y z) = σ (z)
bull z = 0 rarr σ = 0
bull σ (zmax) = σ (ztop) = σtop
bull jest to funkcja liniowaσ (z)
σ(z) = σtop (z ztop)
σ (ztop) = σtop
σ (0) = 0
σ (0) = 0
σ (zbottom) = σbottom lt σtop
z
Wypadkowa siła osiowa
σ(z) = σtop (z ztop)
N = int int [σ(z)] dz dy = int int [σtop (z ztop)] dz dy = (σtop ztop) int int z dz dy =
= t 4 Sy = int int z dz dy śc Sy = 0 = (σtop ztop) 0 = 0
Wypadkowy moment zginający
σ(z) = σtop (z ztop)
My =-int int z [σ(z)] dz dy = int int z [σtop (z ztop)] dz dy =
= (σtop ztop) int int (z2) dz dy =
= t 5 Jy = int int z2 dz dy = (σtop ztop) Jy =
= t 6 Wy top = Jy | z top| = σtop Wy top
My = σmax Wy max
My max = fy Wy max
Jaka jest najlepsza geometria przekroju gdy mamy do
czynienia z następującymi ograniczeniami
A rarr jak najmniejsze (mała masa własna)
Wy rarr jak największe (duża nośność przekroju na
zginanie)
h rarr ograniczone
Na przykład
A = 2 a2
h le 3a
Rys Autor
b = 2a h = a
Jy = b h3 12 = 0167 a4
Wy = b h2 6 = 0333 a3
iy = radic (Jy A) = 0289 a
My max = 0333 a3 fy
Rys Autor
b = a h = 2a
Jy = b h3 12 = 0667 a4
Wy = b h2 6 = 0667 a3
iy = radic (Jy A) = 0577 a
My max = 0667 a3 fy
Rys Autor
b = 2 a 3 h = 3 a
Jy = b h3 12 = 1500 a4
Wy = b h2 6 = 1000 a3
iy = radic (Jy A) = 0866 a
My max = 1000 a3 fy
Rys Autor
Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Wypadkowa siła osiowa
σ(z) = σtop (z ztop)
N = int int [σ(z)] dz dy = int int [σtop (z ztop)] dz dy = (σtop ztop) int int z dz dy =
= t 4 Sy = int int z dz dy śc Sy = 0 = (σtop ztop) 0 = 0
Wypadkowy moment zginający
σ(z) = σtop (z ztop)
My =-int int z [σ(z)] dz dy = int int z [σtop (z ztop)] dz dy =
= (σtop ztop) int int (z2) dz dy =
= t 5 Jy = int int z2 dz dy = (σtop ztop) Jy =
= t 6 Wy top = Jy | z top| = σtop Wy top
My = σmax Wy max
My max = fy Wy max
Jaka jest najlepsza geometria przekroju gdy mamy do
czynienia z następującymi ograniczeniami
A rarr jak najmniejsze (mała masa własna)
Wy rarr jak największe (duża nośność przekroju na
zginanie)
h rarr ograniczone
Na przykład
A = 2 a2
h le 3a
Rys Autor
b = 2a h = a
Jy = b h3 12 = 0167 a4
Wy = b h2 6 = 0333 a3
iy = radic (Jy A) = 0289 a
My max = 0333 a3 fy
Rys Autor
b = a h = 2a
Jy = b h3 12 = 0667 a4
Wy = b h2 6 = 0667 a3
iy = radic (Jy A) = 0577 a
My max = 0667 a3 fy
Rys Autor
b = 2 a 3 h = 3 a
Jy = b h3 12 = 1500 a4
Wy = b h2 6 = 1000 a3
iy = radic (Jy A) = 0866 a
My max = 1000 a3 fy
Rys Autor
Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Wypadkowy moment zginający
σ(z) = σtop (z ztop)
My =-int int z [σ(z)] dz dy = int int z [σtop (z ztop)] dz dy =
= (σtop ztop) int int (z2) dz dy =
= t 5 Jy = int int z2 dz dy = (σtop ztop) Jy =
= t 6 Wy top = Jy | z top| = σtop Wy top
My = σmax Wy max
My max = fy Wy max
Jaka jest najlepsza geometria przekroju gdy mamy do
czynienia z następującymi ograniczeniami
A rarr jak najmniejsze (mała masa własna)
Wy rarr jak największe (duża nośność przekroju na
zginanie)
h rarr ograniczone
Na przykład
A = 2 a2
h le 3a
Rys Autor
b = 2a h = a
Jy = b h3 12 = 0167 a4
Wy = b h2 6 = 0333 a3
iy = radic (Jy A) = 0289 a
My max = 0333 a3 fy
Rys Autor
b = a h = 2a
Jy = b h3 12 = 0667 a4
Wy = b h2 6 = 0667 a3
iy = radic (Jy A) = 0577 a
My max = 0667 a3 fy
Rys Autor
b = 2 a 3 h = 3 a
Jy = b h3 12 = 1500 a4
Wy = b h2 6 = 1000 a3
iy = radic (Jy A) = 0866 a
My max = 1000 a3 fy
Rys Autor
Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Jaka jest najlepsza geometria przekroju gdy mamy do
czynienia z następującymi ograniczeniami
A rarr jak najmniejsze (mała masa własna)
Wy rarr jak największe (duża nośność przekroju na
zginanie)
h rarr ograniczone
Na przykład
A = 2 a2
h le 3a
Rys Autor
b = 2a h = a
Jy = b h3 12 = 0167 a4
Wy = b h2 6 = 0333 a3
iy = radic (Jy A) = 0289 a
My max = 0333 a3 fy
Rys Autor
b = a h = 2a
Jy = b h3 12 = 0667 a4
Wy = b h2 6 = 0667 a3
iy = radic (Jy A) = 0577 a
My max = 0667 a3 fy
Rys Autor
b = 2 a 3 h = 3 a
Jy = b h3 12 = 1500 a4
Wy = b h2 6 = 1000 a3
iy = radic (Jy A) = 0866 a
My max = 1000 a3 fy
Rys Autor
Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

b = 2a h = a
Jy = b h3 12 = 0167 a4
Wy = b h2 6 = 0333 a3
iy = radic (Jy A) = 0289 a
My max = 0333 a3 fy
Rys Autor
b = a h = 2a
Jy = b h3 12 = 0667 a4
Wy = b h2 6 = 0667 a3
iy = radic (Jy A) = 0577 a
My max = 0667 a3 fy
Rys Autor
b = 2 a 3 h = 3 a
Jy = b h3 12 = 1500 a4
Wy = b h2 6 = 1000 a3
iy = radic (Jy A) = 0866 a
My max = 1000 a3 fy
Rys Autor
Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

b = a h = 2a
Jy = b h3 12 = 0667 a4
Wy = b h2 6 = 0667 a3
iy = radic (Jy A) = 0577 a
My max = 0667 a3 fy
Rys Autor
b = 2 a 3 h = 3 a
Jy = b h3 12 = 1500 a4
Wy = b h2 6 = 1000 a3
iy = radic (Jy A) = 0866 a
My max = 1000 a3 fy
Rys Autor
Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

b = 2 a 3 h = 3 a
Jy = b h3 12 = 1500 a4
Wy = b h2 6 = 1000 a3
iy = radic (Jy A) = 0866 a
My max = 1000 a3 fy
Rys Autor
Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Jy = 2 [ b h3 12 ] + 2 [ A1 d2 ]
Sztywność własna Twierdzenie Steinera
b = a h = a d = a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0167 a4 + 2000 a4 = 2167 a4
Wy = Jy z = 1444 a3
iy = radic (Jy A) = 1041 a
My max = 1444 a3 fy
Rys Autor
b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

b = 2a h = 05a d = 125 a x = 15 a A1 = a2
Jy = 2 [ b h3 12 ] + 2 [A1 d2 ] =
= 0042 a4 + 3125 a4 = 3167 a4
Wy = Jy z = 2111 a3
iy = radic (Jy A) = 1258 a
My max = 2111 a3 fy
Rys Autor
A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

A 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy
Jy 1000 4000 9000 13000 19000
Wy 1000 2000 3000 4333 6333
iy 1000 2000 3000 3602 4221
My max 1000 2000 3000 4333 6333
Rys Autor
W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

W obliczeniach celowo został popełniony błąd
Jaki to błąd
Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Twierdzenie Steinera może być zastosowane jedynie wtedy
gdy istnieje sztywne połączenie między wszystkimi częściami
przekroju zapobiegające zmianie ich wzajemnej odległości
Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Brak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = a h = a d = a x = 15 a
Jy = 0167 a4
Wy = Jy z = 0111 a3
iy = radic (Jy A) = 0289 a
My max = 0111 a3 fy
Rys Autor
Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Bak połączenia ndash jedynie sztywność własna
Jy = 2 [ b h3 12 ]
b = 2a h = 05a d = 125 a x = 15 a
Jy = 0042 a4
Wy = Jy z = 0028 a3
iy = radic (Jy A) = 0145 a
My max = 0028 a3 fy
Rys Autor
Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Twierdzenie Steinera Prawda
A 2a2 2a2 2a2 2a2 2a2 2a2 2a2
Jy 0167 a4 0667 a4 1500 a4 2167 a4 3167 a4 0167 a4 0042 a4
Wy 0333 a3 0667 a3 1000 a3 1444 a3 2111 a3 0111 a3 0028 a3
iy 0289 a 0577 a 0866 a 1041 a 1258 a 0289 a 0145 a
M y 0333 a3 fy 0667 a3 fy 1000 a3 fy 1444 a3 fy 2111 a3 fy 0111 a3 fy 0028 a3 fy
Jy 1000 4000 9000 13000 19000 1000 0250
Wy 1000 2000 3000 4333 6333 0333 0083
iy 1000 2000 3000 3602 4221 1000 0500
My max 1000 2000 3000 4333 6333 0333 0083
Rys Autor
Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Najlepszy kształt przekroju w przypadku elementu zginanego
I
Dwuteownik Kratownica
Rys Autor
Rys discountsteelcom
Rys conference-truss-hirecouk
Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Dla przekroju prostokątnego roacutewnoległego do osi i oddalonego od niej sztywność własna
może być pominięta
Rys Autor
Sztywność własna= 0167 a4 SzW = 0167 a4 SzW = 0042 a4
Twierdzenie Steinera= 00 a4 TS = 2000 a4 TS = 3125 a4
Całość = 1000 + 00 Całość = 77 + 923 Całość = 13 + 987
IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

IPE A 600 [mm]
h b tf tw r
597 220 175 98 24
Jy = 82 920 cm4
Rys Autor
Trzy prostokąty dla poziomych SzW + TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [ (1753 22 12) + 175 22 (597 2ndash 175 2)2 ] =
= 79 161 cm4 (9547)
Trzy prostokąty dla poziomych tylko TS
Jy = (597 ndash 2 175)3 098 12 +
+ 2 [175 22 (597 2ndash 175 2)2 ] = 79 142 cm4
(9544)
Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Oproacutecz zakresu sprężystego obliczenia można prowadzić w zakresie sprężysto-
plastycznym i plastycznym
Rys Autor
Zakres sprężysty
liniowy rozkład
naprężeń
Stały rozkład
naprężeń w
części ściskanej i
rozciąganej
Liniowo zmienne
Stałe
σtop = fy
Stałe
σbottom = fy
Zakres spręzysto-
plastycznyZakres
plastyczny
σbottom le fy
σtop le fy
σbottom = fy
σtop = fy
Zaawansowane charakterystyki geometryczne
Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Rys Autor
Ogoacutelnie
My = intA
int σ(y z) z dz dy
and
N = intA
int σ(y z) dz dy
Przyjmijmy taki sam układ sił
przekrojowych jak poprzednio
N = 0
oraz
My ne 0
Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Rys Autor
N = intA
int σ(y z) dz dy =
= intA1
int fy dz dy + intA2
int -fy dz dy =
= fy intA1
int dz dy - fy intA2
int dz dy =
= t 3 A = int int dz dy =
= A1 fy - A2 fy
N = 0 rarr A1 = A2
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Rys Autor
Przy czystym zginaniu w przypadku pełnego
uplastycznienia przekroju konieczne staje się
znalezienie linii dzielącej pole przekroju na dwie
połowy (A1 = A2 = A 2)
Dla przekroju symetrycznego (oś sprężysta y = oś
symetrii) nowa oś pokrywa się ze starą
Dla przekroju niesymetrycznego nowa oś y nie jest
starą osią yA1
A2
yy
z
Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Rys Autor
Zakres sprężysty S1el(yel) = -S2el(yel)
A1el ne A2el
S1el
S2el
yel
ypl
yel
ypl
A2pl
A1pl
Zakres plastyczny A1pl = A2pl
S1pl(ypl) ne -S2pl(ypl)l
Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Rys Autor
A1 = A2 = A 2
My = int int z [σ(z)] dz dy =
= intA1
int (z fy) dz dy + intA2
int (-z fy) dz dy =
= fy ( intA1
int z dz dy - intA2
int z dz dy ) =
= t 4 Sy = int int z dz dy =
= fy [ |S(A1)y| + |S(A2)y|]
A1
A2
σ(y z) = fy
σ(y z) = -fy
Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Rys Autor
My = fy [ |S(A1)y| + |S(A2)y|]
Można to zapisać jako
My = fy Wpl y
Wpl y (plastyczny wskaźnik wytrzymałości) jest specyficzną
charakterystyką geometryczną przekroju ważną dla pracy w zakresie
plastycznym
Dla przekroju symerycznego (y = y)
Wpl y = 2 (moment statyczny połowy przekroju względem osi y = y)
Ogoacutelnie (i j = y z)
Wel i = Ji | jmax|
Wpl i gt Wel i
A1
A2 yy
z
Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Rys Autor Rys ijirdcom
Oproacutecz sprężystego i plastycznego wskaźnika wytrzymałości konieczne jest niekiedy
rozpatrywanie wskaźnika efektywnego Pojawia się on w sytuacji przekrojoacutew bardzo
smukłych (cienki i wysoki środnik) dla ktoacuterych może dojść do utraty stateczności lokalnej
ścianek ściskanych
Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Rys Autor
Część ktoacutera podlega niestateczności lokalnej jest pomijana
Przekroacutej efektywny to fikcyjny przekroacutej z ktoacuterego usunięto
fragmenty poacutełek środnika podlegające niestateczności
W przypadku rozpatrywania przekroju efektywnego
konieczne jest znalezienie efektywnego pola przekroju
efektywnego środka ciężkości efektywnego momentu
bezwładności i efektywnego wskaźnika wytrzymałości
Weff le Wel lt Wpl
Aeff le A
Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Rys Autor
Ścinanie
Zgodnie z Mechaniką Teoretyczną
τ = V S y(z) Jy t(z)
Można to zapisać jako
τ = V AV
τ = max gdy AV = min AV = min dla t = min oraz S y = max
AV = Jy t(z = 0) S y(z = 0)
AV kolejna specyficzna charakterystyka geometryczna (bdquoczynne pole przekroju) ważna dla
ścinania
Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Ogoacutelnie
tf ltlt h
Jy asymp h3 tw 12 + 2 [tf b (h 2)2] =
= h2 (h tw 12 + tf b 2)
Sy (połowa przekroju) asymp
asymp tw (h 2) (h 4) + tf b (h 2) =
= h (h tw 8 + tf b 2)
Rys Autor
AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

AV = Jy tw S y =
= tw [h2 (h tw 12 + tf b 2)] [h (h tw 8 + tf b 2)] =
= tw h [(h tw 12 + tf b 2) (h tw 8 + tf b 2)] =
= h tw asymp tf b = A = tw h [(A 12 + A 2) (A 8 + A 2)] =
= tw h (A 2) [(1 6) +1] (A 2) [(1 4) + 1] =
= tw h [(1 6) +1] [(1 4) + 1] = tw h (1167 1250) asymp tw h
AV asymp tw h
Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Uogoacutelnienie
AV może być przybliżone jako pole części przekroju roacutewnoległej do kierunku
działania siły
Rys Autor
Vz
Vy
AV z = tw hAV y = 2 tf b
Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Skręcanie jest najbardziej skomplikowanym rodzajem obciążenia Należy je rozpatrywać
na kilka roacuteżne sposoby
bull przekroje okrągłe (pręty okrągłe)
bull przekroje zamknięte okrągłe (rury okrągłe)
bull przekroje zamknięte nieokrągłe (rury kwadratowe i prostokątne)
bull część przekrojoacutew otwartych ( L T )
bull pozostałe przekroje otwarte
Zroacuteżnicowanie polega na odmiennych deformacjach prętoacutew skręcanych odmiennych
rozkładach naprężeń lub odmiennych wzorach na charakterystyki geometryczne
TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

TEd
∆x
∆x
∆x
Efektem momentu skręcającego
jest nie tylko rotacja przekroju ale i
jego deplanacja ndash początkowo
płaskie i roacutewnoległe przekroje stają
nie nie-płaskie i nieroacutewnoległe
Nie wszystkie kształty przekroju
podlegają deplanacji a dla części
tych ktoacutere podlegają deplanacja ma
pomijalnie małe wartościRys Autor
Przypadek ogoacutelny
Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Przekroacutej Deplanacja Moment skręcający
TEd
Uwagi
Okrągły (pręt
rura)
Brak TEd = Tt Ed -
L
T
Bardzo mała Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd asymp Tt Ed -
Pozostałe Istotna Swobodna TEd = Tt Ed -
Skrępowana
podporami
TEd = Tt Ed + Tw Ed Dodatkowo pod uwagę
należy wziąć BEd
Tt Ed ndash moment skręcania St Venanta (swobodna deplanacja przekroju)
Tw Ed ndash moment skręcania skrępowanego (skrępowana deplanacja przekroju)
B Ed - bimoment
Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Deplanacja dwuteownika obie poacutełki
podlegają deplanacji w przeciwnych
kierunkach
W przypadku skręcania skrępowanego
pojawia się specyficzny rozkład naprężeń
w poacutelkach
σ
σ
Naprężenia te mogą być
przedstawione jako efekt
bimomentu
B = h M
M = |M1| = |M2|
Bimoment jest także brany pod
uwagę w przypadku analizy
przekrojoacutew cienkościennych
h
M1
M2
Rys Autor
W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

W analogii do zginania wprowadzić można
moment bezwładności przy skręcaniu i
wskaźnik wytrzymałości przekroju przy
skręcaniu
WT = JT tmax
tmax = max ( t1 t2 t3 )
h1
h2
h3
t1
t2
t3
Rys Autor
Sposoacuteb deformacji pręta powoduje że konieczne jest rozpatrywanie dwu
odrębnych grup charakterystyk geometrycznych
Pierwsza grupa dotyczy skręcenia przekroju i nośnością z uwagi na moment
skręcający
Druga związana jest z deplanacją przekroju i nośnością z uwagi na bimoment
Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Dla dwuteownikoacutew wartości zestawione są w tablicach do projektowania
Rys europrofillu
Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Można też zastosować inne wzory przybliżone
JT asymp α (h1 t13 + h2 t2
3 + h3 t33 + ) 3
h1
h2
h3
t1
t2
t3
Przekroacutej αDwuteownik
gorącowalcowany
120
Dwuteownik spawany ż
żebrami pionowymi
150
Kątownik 100
Ceownik 112
Teownik 140
Rys Autor
Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Dla przekrojoacutew zamkniętych moment bezwładności przy skręcaniu i wskaźnik
wytrzymałości przy skręcaniu jest liczony odmiennie
t
A0
Rys Autor
JT = 4 A02 int (ds t)
WT = 2 t A0
ds
Także dla przekrojoacutew okrągłych
JT = π r 4 2
WT = π r 3 2
Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Charakterystyki geometryczne związane z deplanacją przekroju są najbardziej
skomplikowane od strony obliczeniowej
W analogii do zginania można wprowadzić pojęcia wycinkowego momentu bezwładności
Jw wspoacutełrzędnej wycinkowej ω i wycinkowego wskaźnika wytrzymałości przekroju Ww
Ww = Jw ω
Przy zginaniu zgodnie ze wzorami z t 6
Wy = Jy z
Wz = Jz y
Jy i Jz maja jedną wartość dla całego przekroju Dla każdego punktu przekroju o
wspoacutełrzędnych (y z) można wyliczyć wartości Wy i Wz ndash aczkolwiek najczęściej
potrzebujemy Wy i Wz dla punktoacutew najbardziej odległych od środka ciężkości (Wy i Wz są
najmniejsze)
Analogicznie jest w przypadku Jw ndash ma jedną wartość dla całego przekroju zaś ω i Ww są
roacuteżne w roacuteżnych punktach Tu roacutewnież z najczęściej potrzebujemy Ww dla punktoacutew
położonych ekstremalnie (najmniejszego Ww)
Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Obliczenia wskaźnikoacutew wytrzymałości przy zginaniu dwukrotnie związane są z procedurą
polegającą na wstępnym przyjęciu pewnego punktu lub kierunku policzeniu na tej
podstawie pewnych charakterystyk geometrycznych a następnie zweryfikowaniu
wstępnego założenia przy pomocy tych charakterystyk
1 Środek ciężkości przyjmujemy dowolny punkt i dowolną orientację osi ndash wyliczamy
momenty statyczne względem tych osi ndash rzeczywiste położenie środka ciężkości jest
odległe od wstępnie przyjętego o proporcje między odpowiednim momentem statycznym a
polem powierzchni
2 Osie głoacutewne centralne w środku ciężkości przyjmujemy dowolnie zorientowane osie ndash
wyliczamy względem tych osi momenty bezwładności i momenty dewiacji ndash znajdujemy
położenie osi głoacutewnych centralnych i wartości odpowiadających im momentoacutew
bezwładności z warunku zerowania się momentoacutew dewiacji
Pętla bdquowstępne przyjęcie i weryfikacja na podstawie wynikoacutewrdquo występuje roacutewnież
dwukrotnie przy obliczaniu charakterystyk geometrycznych związanych z deplanacją
1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

1a Sprowadzamy przekroacutej do linii środkowych gałęzi przekroju
1b Przyjmujemy tzw Biegun w środku ciężkości i Punkt Zerowy w innym
charakterystycznym miejscu najlepiej na przecięciu ktoacuterejś osi i linii przekroju
Rys Autor
B
0
1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

1c Wykonujemy wykres wstępny wspoacutełrzędnej wycinkowej ω0 według zasady
bull w punkcie 0 ma wartość 0
bull krążymy po linii środkowej wokoacuteł bieguna zgodnie z ruchem wskazoacutewek zegara
przechodząc do najbliższego punktu węzłowego
bull w węźle wartość ω0 jest roacutewna (odległość gałęzi od B) (odległość węzła od 0)bull przechodzimy do następnego węzła zgodnie z ruchem wskazoacutewek zegara
bull w kolejnym węźle wartość ω0 jest roacutewna wartości w węźle poprzednim + iloczyn dla
nowego węzła
bull jeśli poruszamy się przeciwnie do zegara nowemu iloczynowi przypisujemy wartość
ujemną
bull pomiędzy węzłami wartości ω0 zmieniają się liniowo
Rys Autor
0
B
1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

1d Liczymy wycinkowe momenty odśrodkowe
Jωy = int [ω0(s) y(s) t(s) ] ds
Jωz = int [ω0(s) z(s) t(s) ] ds
s ndash wspoacutełrzędna położenia na linii środkowej y z ndash odległości od środka ciężkości t ndash
grubości kolejnych gałęzi przekroju
1e Odległość punktu R zwanego w literaturze środkiem zginania ścinania skręcania
od środka ciężkości opisują wzory
y = -Jωy Jz
z = -Jωz Jy
1f Przyjmujemy nowy biegun w punkcie R i punkt zerowy w poprzednim miejscu 0 i
powtarzamy po raz drugi procedurę wyznaczenia wykresu wstępnego wspoacutełrzędnej
wycinkowej ω1
2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

2a Wyliczamy wycinkowy moment statyczny
Sω = int [ω1(s) δ(s) ] ds
s(Q) = Sω A
s(Q) to odległość wzdłuż linii środkowej między punktem 0 a głoacutewnym punktem zerowym
Q Jeśli s(Q) gt 0 wędrujemy zgodnie z zegarem wokoacuteł R jeśli s(Q) lt 0 ndash przeciwnie do
zegara
2b dla bieguna w punkcie R i punktu zerowego w Q po raz trzeci powtarzamy procedurę
wyznaczenia wykresu wspoacutełrzędnej wycinkowej ω Tym razem jest to ostateczny wykres
3 Obliczamy wycinkowy moment bezwładności
Jω = int [ω(s)2 δ(s) ] ds
Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Charakterystyki geometryczne związane ze skręcaniem i deplanacją są ważne nie tylko w
przypadku skręcania ale i w przypadku przekrojoacutew cienkościennych (czasami taką metodą
liczone są przekroje aluminiowe lub stalowe zimnogięte) oraz dla spraw związanych z
utratą stateczności elementu przy ściskaniu czy zginaniu ( rarr wykład 6) Dla przekrojoacutew
bdquopodstawowychrdquo (dwuteowniki ceowniki) wycinkowy moment bezwładności i
wspoacutełrzędna wycinkowa są podane w tablicach do projektowania
Rys Tablice do projektowania konstrukcji
metalowych W Bogucki M Żyburtowicz
Arkady Wa-wa 1996
W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

W razie potrzeby można użyć wzoroacutew przybliżonych
J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

J Żmuda bdquoPodstawy projektowania konstrukcji metalowychrdquo TiT Opole 1992
Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Przykład obliczeniowy
2x L 150x150x15
HEB 220
C 2202x L 100x100x10
C 300
Rys Autor
Bez skręcania deplanacji i charakterystyk efektywnych
HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

HEB 220
y
z
220
220
125
189
C 220
y
z
220
65
125
9
125
1 125
214 + 586
80
40 + 40
Rys Autor
y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

y
z
300
C 300
10
81 125
16
16
50 + 50
100
27 + 73
L 150x150x15
L 100x100x10
y
y
z
z
10
10
6
12
100
100
45 + 10545 + 105
150
150
8
1515
15
282 + 718282 + 718
Rys Autor
A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

A
[cm2]
Jy
[cm4]
Jz
[cm4]
e + f
[cm]
HEB 220 910 8 090 2 840 -
C 220 374 2 690 197 214 + 586
C 300 588 8 030 495 270 + 730
L 100x100x10 192 177 177 282 + 718
L 150x150x15 460 1 100 1 100 450 + 1050
Oba ceowniki są ułożone horyzontalnie Oznacza to ze ich lokalna oś y
odpowiada globalnej osi z zaś lokalna oś z odpowiada globalnej soi y Należy o
tym pamiętać przy obliczaniu momentu bezwładności przekroju
A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

A = Σ Ai = 2 A (L 150x150x15) + A (C 300) + A (HEB 220) + A (C 220) +
+ 2 A (L 100x100x10) =
= 2 ∙ 460 + 588 + 910 + 374 + 2 ∙ 192 =
= 3176 cm2
z1 = 220 2 + 10 + 45 = 165
z2 = 220 2 + 10 - 27 = 93
z4 = 220 2 + 214 = 1314
z5 = 220 2 + 282 = 1382
Rys Autor
Środek ciężkości HEB
z3 = 0
Środek ciężkości 2 (L 150x150x15)
Środek ciężkości 2 (L 100x100x10)
Środek ciężkości C 300
Środek ciężkości C 220
Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Sy = Σ Si y = 2 A (L 150x150x15) z1 +
+ A (C 300) z2 + A (HEB 220) z3 +
+ A (C 220) z4 + 2 A (L 100x100x10) z5 =
= 2 ∙ 460 ∙ 165 + 588 ∙ 93 +
+ 910 ∙ 0 - 374 ∙ 1314 - 2 ∙ 192 ∙ 1382 =
= 1042716 cm3
z3-1 = Sy A = 1042716 3176 = 328 cm
z1-1 = 165 - 328 = 1322
z2-1 = 93 - 328 = 602
z3-1 = 328
z4-1 = 1314 + 328 =
1642
z5-1 = 1382 + 328 = 171
Rys Autor
Środek ciężkości HEB
Środek ciężkości przekroju
Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Jy = [2 Jy (L 150x150x15) + 2 A (L 150x150x15) z21-1] +
+ [Jz (C 300) + A (C 300) z22-1] + [Jy (HEB 220) + A (HEB 220) z2
3-1] +
+ [Jz (C 220) + A (C 220) z24-1] + [2 Jy (L 100x100x10) + 2 A (L 100x100x10) z2
5-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 13222] + [495 + 588 ∙ 6022] + [8 090 + 910 ∙ 3282] +
+ [197 + 374 ∙ 16422] + [2 ∙ 177 + 2 ∙ 192 ∙ 1712] =
= 51 836840 cm4
Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Jz = [2 Jz (L 150x150x15) + 2 A (L 150x150x15) y21-1] +
+ [Jy (C 300)] + [Jz (HEB 220)] +
+ [Jy (C 220)] + [2 Jy (L 100x100x10) +
+ 2 A (L 100x100x10) y25-1] =
= [2 ∙ 1 100 + 2 ∙ 460 ∙ 452] + [8 030] + [2 840] +
+ [2 690] + [2 ∙ 177 + 2 ∙ 192 ∙ 13822] =
= 25 311108 cm4
y1-1 = 45
y5-1 = 220 2 + 282 = 1382
Rys Autor
iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

iy = radic ( Jy A) = 12776 cm
iz = radic ( Jz A) = 8927 cm
Wy el top = Jy ztop = 2 185364 cm3
Wy el bottom = Jy zbottom = 2 134960 cm3
Wz el = Jz ymax = 1 205291 cm3
Rys Autor
ztop = 237
zbottom = 243
ymax = 210
bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

bdquoCzynne pole przekrojurdquo przy ścinaniu
Kształt przekroju przybliżono zestawem prostokątoacutew
Rys Autor
Vz
AV z
Vy
AV y
AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

AV z = 2x (ramię L 150x150x15) + 2x (poacutełka C 300) + (środnik HEB 220) +
+ 2x (poacutełka C 220) + 2x (ramię L 100x100x10) =
= 2 ∙ (15 ∙ 15) + 2 ∙ (10 ∙ 16) + 22 ∙ 09 + 2x (8 ∙ 125) + 2 ∙ (10 ∙ 1) = 1368
Rys Autor
Vz
AV z
Vy
AV y
AV y = 2x (ramię L 150x150x15) + (środnik C 300) + 2x (poacutełka HEB 220) +
+ (środnik C 220) + 2x (ramię L 100x100x10) =
= 2x (15 ∙ 15) + 30x1 + 2 ∙ (22 ∙ 125) + 22 ∙ 09 + 2 ∙ (10 ∙ 1) = 1698
Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Analiza plastyczna podział przekroju na dwa identyczne pola powierzchni
Przekroacutej nadal przybliżony jest zestawem prostokątoacutew
Oś pionowa z (= oś symetrii) dzieli przekroacutej na dwie identyczne połoacutewki
Oś pozioma ndash możliwe położenia
Rys Autor
1
2 3
4
5
1) Linia przechodzi przez ramiona L 150x150x15
2) Linia przechodzi przez środnik C 300
3) Linia przechodzi przez poacutełkę HEB 220
4) Linia przechodzi przez środnik HEB 220 i poacutełki
C 300
5) Linia przechodzi przez środnik HEB 220 poza
poacutełkami C300
Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Możliwość 1
Linia przechodzi przez ramiona L 150x150x15
W najniższym możliwym położeniu (po dolnych licach ramion otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15
Doacuteł C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 = 920
Powierzchnia dolna = 588 + 919 + 2x 192 + 374 = 2256
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 1 wykluczona
Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Możliwość 2
Linia przechodzi przez środnik C 300
W najniższym możliwym położeniu (po dolnym licu środnika otrzymamy wtedy
maksymalne pole części goacuternej)
Goacutera 2x L 150x150x15 + środnik C 300
Doacuteł poacutełki C 300 + HEB 220 + 2x L 100x100x10 + C 220
Powierzchnia goacuterna = 2x 460 + 10 ∙ 300 = 1220
Powierzchnia dolna = 288 + 919 + 2x 192 + 374 = 1966
Nawet przy ekstremalnym położeniu maksymalizującym część goacuterną część goacuterna ma
zbyt małe pole
Możliwość 2 wykluczona
Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Możliwość 5
Linia przechodzi przez środnik HEB 220 poza poacutełkami C300
Goacutera 2x L 150x150x15 + C 300 + goacuterna poacutełka HEB 220 + goacuterna część środnika HEB 220
Doacuteł 2x L 100x100x10 + C 220 + dolna poacutełka HEB 220 + dolna część środnika HEB 220
Założenie powierzchnia goacuterna = powierzchnia dolna
Powierzchnia (poacutelka goacuterna HEB 220) = powierzchnia (poacutełka dolna HEB 220) poacutełki możemy
pominąć
Powierzchnia goacuterna = 2x 460 + 588 + goacutera środnika = 1508 + goacutera środnika
Powierzchnia dolna= 2x 192 + 375 + doacuteł środnika = 759 + doacuteł środnika
Cały środnik (goacutera + doacuteł) asymp 17 za mało by doprowadzić do wyroacutewnania obu części
Możliwość 5 wykluczona
Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Do szczegoacutełowej analizy pozostały możliwości 3 i 4
Rys Autor
a a
b b
4) Linia przechodzi przez środnik HEB 220 i
poacutełki C 300
(225 mm le a le 1000 mm a + b = 1000 mm)
3) Linia przechodzi przez poacutełkę HEB
220
(100 mm le a lt 225 mm a + b = 100 mm)
Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Rys Autor
a a
b b
4 3
A1 =
= A 2 = A2
2x (L 150x150x15)
środnik C 300
część poacutełek C 300
cała goacuterna poacutełka HEB 220
część środnika HEB 220
2x (L 150x150x15)
web C 300
część poacutełek C 300
część goacuternej poacutełki HEB 220
brak środnika 220
A2 =
= A 2 = A1
brak poacutełki HEB 220
część środnika HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
część goacuternej poacutełki HEB 220
cały środnik HEB 220
część poacutełek C 300
poacutełka dolna HEB 220
C 220
2x (L 100x100x10)
4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

4 3
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
22 ∙ 125
(a - 1 - 125) ∙ 09
2 ∙ (460)
30 ∙ 1
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
[22 - 125 - (a - 1)] ∙ 09
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
[125 - (a - 1)] ∙ 22
09 ∙ (22 - 2 ∙ 125)
(10 - a) ∙ 16
22 ∙ 125
374
2 ∙ (192)
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl
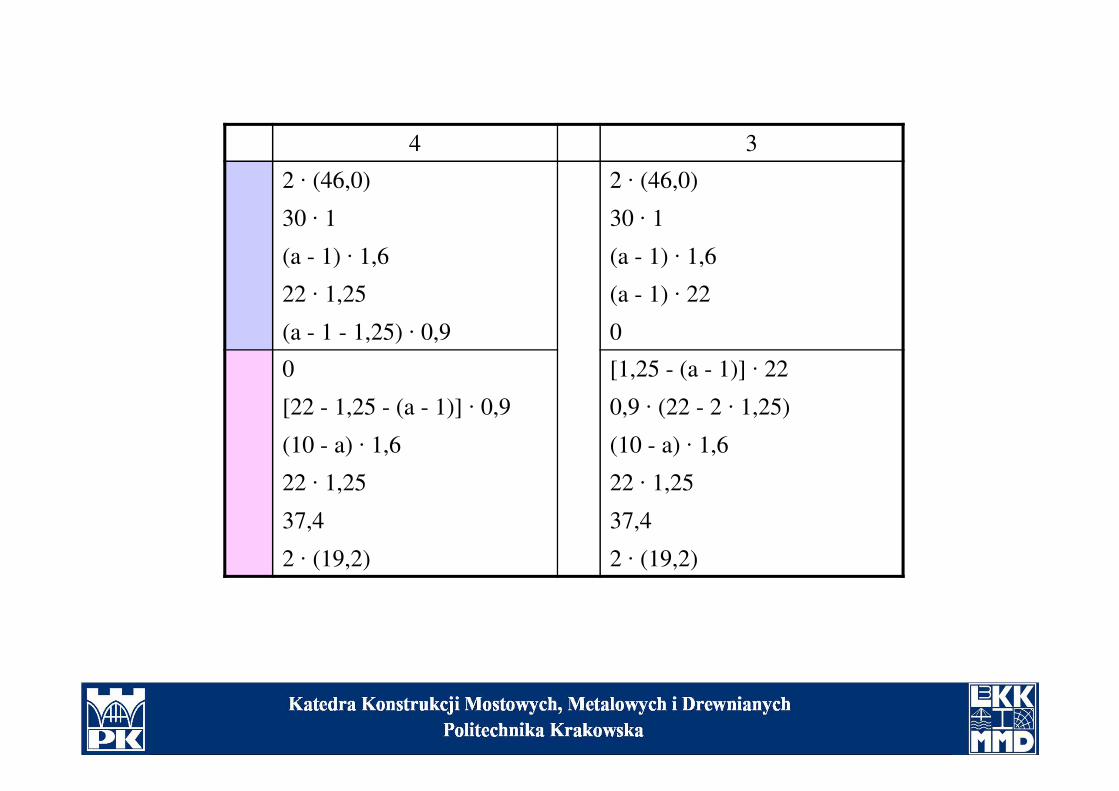
4 3
92
30
(a - 1) ∙ 16
275
(a - 225) ∙ 09
92
30
(a - 1) ∙ 16
(a - 1) ∙ 22
0
0
(2175 - a) ∙ 09
(10 - a) ∙ 16
275
374
384
(225 - a) ∙ 22
1755
(10 - a) ∙ 16
275
374
384
4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

4 3
1495
16a - 16
09a - 2025
122
16a - 16
22a - 22
19575 - 09a
16 - 16a
1033
495 - 22a
16 - 16a
12085
4 3
25a + 145875 236a + 98400
138875 - 25a 186450 - 236a
4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

4 3
25a + 145875 =
= 138875 - 25a
236a + 98400 =
= 186450 - 236a
4 3
50a = -7000 472a = 88050
4 3
a = -14 a = 19
Wnioski
Możliwość 4 położenie osi opisane jest przez zależność 225 mm le a le 1000 mm
rezultat a = -14 mm sprzeczność możliwość wykluczona
Możliwość 3 położenie osi opisane jest przez zależność 100 mm le a lt 225 mm
rezultat a = 19 mm OK możliwość przyjęta
19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

19
81
Wy pl = |Sy (A1)| + |Sy (A2)|
Rys Autor
yel
68
ypl
Sy (A1) = Sy [2x (L 150x150x15)] +
+ Sy (środnik C 300) + Sy [ 2x (goacuterne części poacutełek C 300)] +
+ Sy (goacuterna część poacutełki HEB 220)
Sy (A2) = Sy (dolna część poacutełki HEB 220) +
+ Sy [ 2x (dolne części poacutełek C 300)] +
+ Sy (środnik HEB 220) + Sy (dolna poacutełka HEB 220) +
+ Sy (C 220) + Sy [2x (L 100x100x10)]
z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

z1-1 = 64
Rys Autor
ypl
Sy (A1) = z1-1 [2x A(L 150x150x15)] +
+ z2-1 A(środnik C 300) +
+ z3-1 [ 2x A(goacuterne części poacutełek C 300)] +
+ z4-1 A(goacuterna część poacutelki HEB 220)
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
Sy (A1) = 64 ∙ 2 ∙ 460 + 14 ∙ 30 ∙ 1 + 05 ∙ 2 ∙ 16 ∙ 09 + 05 ∙ 22 ∙ 09 = 64214
[cm3]
z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

z1-1 = 64
Rys Autor
ypl
z2-1 = 14
z3-1 = z4-1 = 5
z5-1 = 2
z6-1 = 41
z7-1 = 101
z8-1 = 205z9-1 = 232 z10-1 = 239
|Sy (A2)| = 02 ∙ 04 ∙ 22 + 2 ∙ 41 ∙ 81 ∙ 16 + 101 ∙ 195 ∙ 09 + 205 ∙ 125 ∙ 22 +
+ 232 ∙ 374+ 239 ∙ 2 ∙ 192 = 2 64066 [cm3]
Sy (A2) = z5-1 A(dolna część poacutełki HEB 220) + z6-1 [ 2x A(dolne części poacutelek C 300)] +
+ z7-1 A(środnik HEB 220) + z8-1 A(poacutelka dolna HEB 220) + z9-1 A(C 220) +
+ z10-1 [2x A(L 100x100x10)]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)|
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = Sz (L 150x150x15) +
+ Sz (lewa część środnika C 300) +
+ Sz (lewa część poacutełki goacuternej HEB 220) +
+ Sz (lewa poacutełka C 300) +
+ Sz (lewa część środnika HEB 220) +
+ Sz (lewa część poacutełki dolnej HEB 220) +
+ Sz (lewa część środnika C 220) +
+ Sz (lewa poacutelka C 220) +
+ Sz (L 100x100x10)
zel = zpl
Rys Autor
y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

y1-1 = 45
y2-1 = 75
y3-1 =
= y6-1 =
= y7-1 =
55
y4-1 = 142
y5-1 = 2
y8-1 = 104
y9-1 = 138
|Sz (A2)| = y1-1 A(L 150x150x15) +
+ y2-1 A(lewa część środnika C 300) +
+ y3-1 A(lewa część poacutełki goacuternej HEB 220) +
+ y4-1 A(lewa poacutełka C 300) +
+ y5-1 A(lewa część środnika HEB 220) +
+ y6-1 A(lewa część poacutełki dolnej HEB 220) +
+ y7-1 A(lewa część środnika C 220) +
+ y8-1 A(lewa poacutełka C 220) +
+ y9-1 A(L 100x100x10) =
= 45 ∙ 46 + 75 ∙ 15 ∙ 1 + 55 ∙ 11 ∙ 125 +
+ 142 ∙ 9 ∙ 16 + 02 ∙ 195 ∙ 05 + 55 ∙ 11 ∙ 125 +
+ 55 ∙ 11 ∙ 09 + 104 ∙ 125 ∙ 7 + 138 ∙ 192 =
= 108759 [cm3]
zel = zpl
Rys Autor
Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Wy pl = |Sy (A1)| + |Sy (A2)| = 64214 [cm3] + 2 64066 [cm3] = 3 28280 [cm3]
Wz pl = |Sz (A1)| + |Sz (A2)| = 2x |Sz (A1)| = 2x |Sz (A2)| = 2 17518 [cm3]
Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Charakterystyka WartośćA [cm2] 3176
AV y [cm2] 1698
AV z [cm2] 1368
Jy [cm4] 51 836840
Jz [cm4] 25 311108
iy [cm] 1278
iz [cm] 893
Wy el top [cm3] 2 18536
Wy el bottom [cm3] 2 13496
Wz el [cm3] 1 20529
Wy pl [cm3] 3 28280
Wz pl [cm3] 2 17518
Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Sprawdzenie wynikoacutew
AV y + AV z asymp A OK
min (Wy el top Wy el bottom ) lt Wy pl OK
Wz el lt Wz pl OK
yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

yel
ypl
zel = zpl
243
68
169
Rys Autor
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl
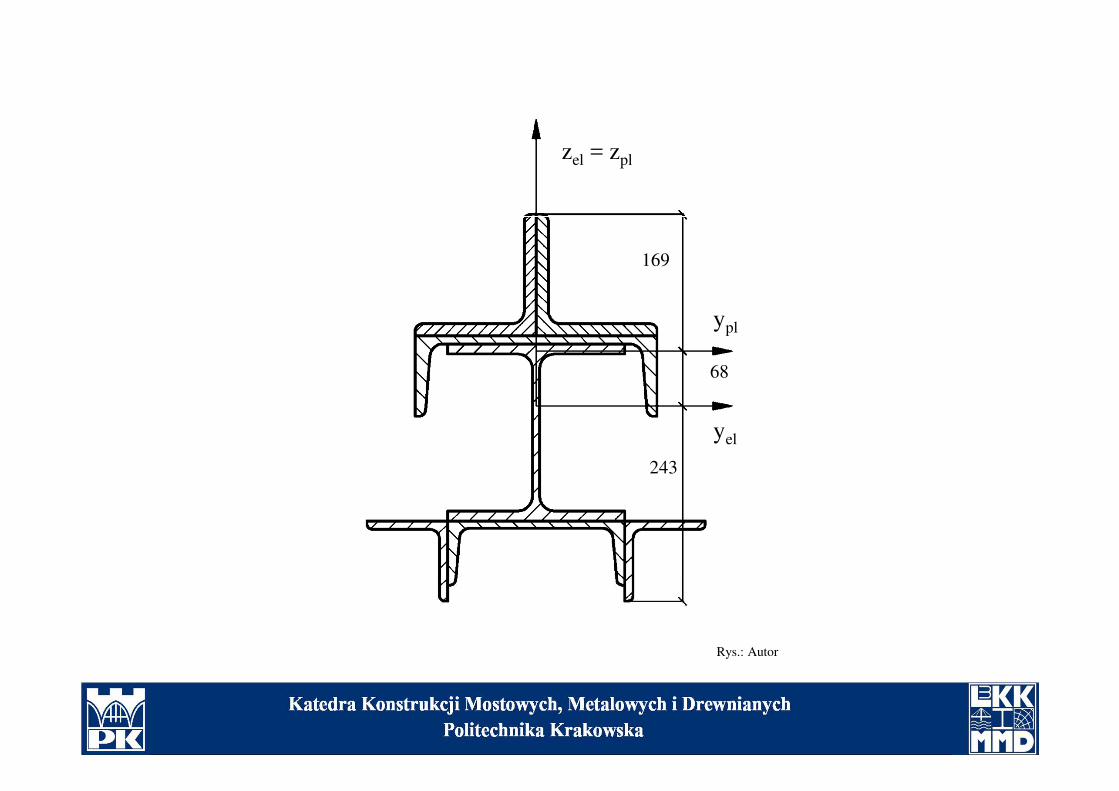
Rodzaje wskaźnikoacutew wytrzymałości przy zginaniu
Definicje deplanacji przekroju i bimomentu
Zagadnienia egzaminacyjne
Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl

Dziękuję za uwagę
copy 2019 dr inż Tomasz Michałowski
tmichaluskpkedupl