june 2011disc school: traffic control1 networked control systems: modelling and control of road...
Post on 19-Dec-2015
215 views
TRANSCRIPT

June 2011 DISC School: traffic control 1
Networked control systems:Modelling and Control
of road traffic
René Boel
with thanks to
N. Marinica, M. Moradzadeh, and H. Sutarto
SYSTeMS Research Group, UGent

June 2011 DISC School: traffic control 2
examples of networked control systems
• freeway traffic with on-ramp metering• stabilization of frequency and voltage in power
transmission and distribution network• irrigation networks• communication networks• autonomous vehicles jointly carrying out a
complicated task• macro-economic models• ...

June 2011 DISC School: traffic control 3
modeling of networked control systems
• decomposition
• abstraction

June 2011 DISC School: traffic control 4
Road traffic networks: example of network of components, with simple dynamics
for each component,but with complicated behavior due to interactions between
components

June 2011 DISC School: traffic control 5
traffic models
• urban traffic versus freeway traffic?
• boundaries of network/boundaries between components
• local variables and global variables
• level of detail of model?

June 2011 DISC School: traffic control 6
sensors and actuators for urban traffic
• sensors: – (current) video cameras, radars measuring queues
at intersections– (current) magnetic loops counting number of
vehicles passing location per time unit– (future) GPS/radio communication vehicle/roadside
• actuator:– (current) traffic lights– (future) reference trajectories communicated to
vehicles equiped with collision avoidance tools

June 2011 DISC School: traffic control 7
sensors and actuators for freeway traffic
• sensors: – (current) magnetic loops counting number of
vehicles passing location per time unit– (future) vehicle-to-vehicle and vehicle-to-roadside
communication
• actuator:– (current) adjustable speed limitations– (current) on-ramp metering– (current) varaible message signs (routing advice)– (future) platooning and speed reference trajectories

June 2011 DISC School: traffic control 8
traffic networks
• interaction with environment: – inflow and outflow of vehicles at edges of network, – road conditions (weather, accidents,...)
• state variables for different components– microscopic model: (velocity position) for each
vehicle in each component– macroscopic model: (flow, density, speed) at each
location along each link– macroscopic model intersection: queue sizes

June 2011 DISC School: traffic control 9
traffic networks
• components:– links (connecting entrance and exit point, connected
to source, sink, or exit/entrance point of other link– on and off ramps along freeways (sources/sinks),
with or without on-ramp metering– controlled intersections (traffic lights)– uncontrolled intersections (priority rules)– round-abouts– sources and sinks of traffic (edges of network)

June 2011 DISC School: traffic control 10
traffic networks
• components interconnected via entrance/exit nodes (ports in bond graph terminology)
• interaction between components: traffic flow from exit point of one component to entrance point of downstream component connected to it

June 2011 DISC School: traffic control 11
simulation
• need efficient simulation for – analyzing performance– model predictive control design– particle filtering (simulation based state
estimation to be studied later on)

June 2011 DISC School: traffic control 12
abstraction
• keep number of variables small– macroscopic models with speed/density per
link/cell– platoon based models rather than vehicle
based models– fluid flow models (fluid PN, Markov modulated
arrival streams)

June 2011 DISC School: traffic control 13
freeway traffic
components: cells/on-and off-ramps
macroscopic model describes average speed and density

June 2011 DISC School: traffic control 14
freeway traffic macroscopic model:
• characterize state of system by defining for each cell
– number of vehicles Ni(t) in cell i at time t
(if length of cell is L, and cell i has pi lanes in parallel, this defines density i(t) = Ni(t)/L.pi )
– average speed vi(t) of these Ni(t) vehicles
– flow of vehicles leaving cell qi(t) = i(t).vi(t) (provided vehicles uniformly distributed over cell)

June 2011 DISC School: traffic control 15
Compositional representation of network
cell or section i
11, ii vN ii vN , 11, ii vN
mkmz ,1
Sensor measurements
1 i - 1 1
… i i + 1 … Nm
mkmz ,
Link m - 1 Link m Link m + 1
wi-1 wi
QiQi-1
traffic source or exit gate of upstream link
sink or entrance gate of downstream link

June 2011 DISC School: traffic control 16
classical partial differential equation model
• cell size L 0• state variables at location x at time t:
– density (x,t) Ni(t)/Li
– speed v(x,t)– flow q(x,t) = (x,t).v(x,t)
• flow model as in hydraulics: conservation equation of fluid:
),(),(),(
txx
txq
t
tx

June 2011 DISC School: traffic control 17
classical partial differential equation model
• q(x,t) = v(x,t).(x,t)
• v(x,t) selected according to local traffic conditions, and observed traffic conditions ahead of position x
• simplest static model:
v(x,t) = f((x,t))
v
vfree
cong
jam

June 2011 DISC School: traffic control 18
classical partial differential equation model
• leads to 1st order partial differential equation:
v= f()
vfree
cong jam
),(),()).,((),(
txtxtxftt
tx
June 2011 DISC School: traffic control 19
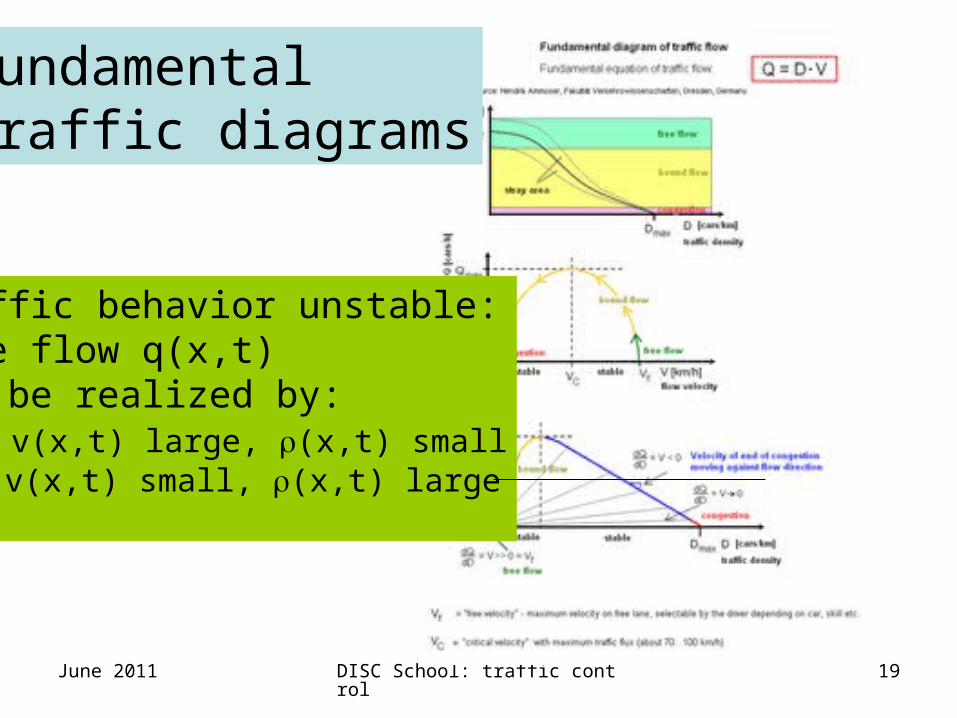
fundamental traffic diagrams
traffic behavior unstable:same flow q(x,t) can be realized by:
• v(x,t) large, (x,t) small• v(x,t) small, (x,t) large

June 2011 DISC School: traffic control 20
feedback control• flow rate always below maximal flow rate
qmax = vfree.cong
• try to control traffic flow so that always (x,t) cong
to avoid waste of capacity• if for some location x, time > t simulator
predicts (x,t) > cong(x), then control action u(x,t): slow down traffic
upstream of x
June 2011 DISC School: traffic control 21
state feedback
• provided sufficiently accurate estimates of current state are available
• model predictive control design possible
• take into account hard constraint (x,t) cong
• computationally hard: distributed control needed

June 2011 DISC School: traffic control 22
coordination control
• optimize traffic flow per region, but take interaction between neignbouring regions into account
• need "simple" model of traffic behavior in order to allow fast simulation
• fast simulation allows fast prediction of effects of different control actions (variable routing signs, speed limitations, on-ramp metering)

June 2011 DISC School: traffic control 23
effect of speed limitations
• reduce vfree
• implies reduce
max flow
• but increase cong
v= f()
vfree
cong jam
q= .f()
qmax
congjam
June 2011 DISC School: traffic control 24
control via speed limitations
• requires careful coordination of local control actions
• in order to achieve good performance of overall system

June 2011 DISC School: traffic control 25
coordination
= synchronization of traffic lights
case study: coordinated control
of urban traffic

June 2011 DISC School: traffic control 26
urban traffic network
Intersection 1
Intersection 2
Intersection 4
Intersection 3
Uncontrolled intersection 5
component 1
Intersection 1 Intersection 2
Intersection 3
Intersection 4
component 2
June 2011 DISC School: traffic control 27
• intersections with traffic lights
= modeled as queues (integrators) competing for server capacity
(ON/OFF allocation by traffic signal)• linking roads modelled by delay + noise
i(t) = in(i)(t-) + noise (connects upstream queue in(i) to queue i)
• arrival streams of vehicles at entrance points at border of network under study
component models for urban traffic models

June 2011 DISC School: traffic control 28
sensors and actuators
• controllable events = red/green switching at intersection
• one control agent per signalized intersection
• observable events = passage time of vehiclesat some sensor locations along links
• current status of traffic lights

June 2011 DISC School: traffic control 29
urban traffic model: controlled intersection
controlled, timed automaton describes state of traffic light
green NS,
red EW
red NS, green
EW,
yellowNS,
red EW
red NS,yellow
EW
controllabletransition
uncontrollable transition
intersection with only 2 phases
ordering of phases fixed, but cycle time not fixed ; some phases may be skipped

June 2011 DISC School: traffic control 30
control decisions
• model allows at each intersection GYR switching at any time
• team of control agents minimizes delays subject to – constraints imposed by supervisor– safety constraints – coordination requirements imposed by neighboring
intersections

June 2011 DISC School: traffic control 31
formalization of distributed supervisory control problems
• supervisor translates specifications for global task into local specifications for local subtasks
• topic of this part of lecture: design of local control agents,
• local agent selects next action to be taken by local actuator, using only...

June 2011 DISC School: traffic control 32
information available to local control agent
• knowledge about local model and about model of interaction with neighboring nodes
• measurements obtained by local sensors local state estimators (using local model
based algorithms)
• messages from neighboring agents and from supervisor

June 2011 DISC School: traffic control 33
coordination = synchronization
• global task executed successfully if all subtasks are successfully executed by local agent
• actions of neighboring agents must be
synchronized so that agents make it as easy as possible
for their neighbors to satisfy subtask
specifications

June 2011 DISC School: traffic control 34
future control paradigm for urban traffic?
• better performance possible if size and speed of platoons of vehicles adapted to traffic lights (current paradigm: adapt traffic lights to driver's decisions)
• control speed of vehicles, using vehicle2-roadside and vehicle2vehicle communication (get driver out of the loop, except for safety)
• benchmark for switching control?

June 2011 DISC School: traffic control 35
how distributed can controller be in order to achieve
satisfactory coordination?• how much control can/must be delegated by
supervisor to local controller?
• this lecture only about structure of local agents, and their communication requirements for coordination
very few formulas, but emphasis on models since coordination depends on anticipation
June 2011 DISC School: traffic control 36
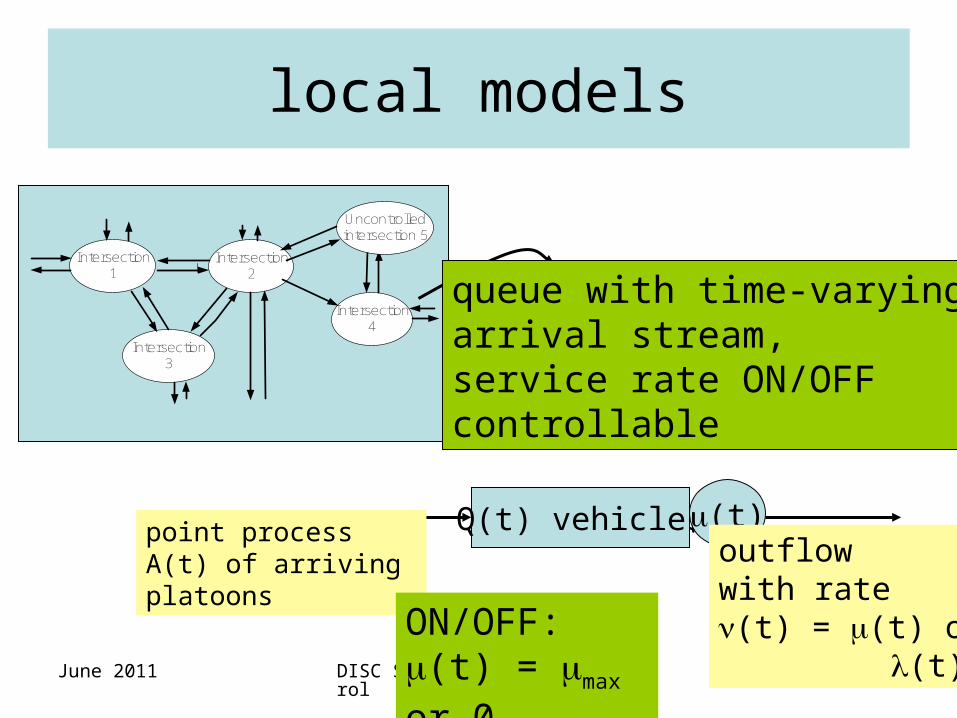
local models
queue with time-varyingarrival stream, service rate ON/OFFcontrollable
Q(t) vehiclespoint processA(t) of arriving platoons
(t)outflow with rate (t) = (t) or (t)
ON/OFF:(t) = max or 0
Intersection 1
Intersection 2
Intersection 4
Intersection 3
Uncontrolled intersection 5

June 2011 DISC School: traffic control 37
urban traffic: queueing at node
greenred +yellow
vehicle based model
greenred +yellow
platoon based model
a platoon of 4vehicles arrives during this interval of time
a platoon of 8 vehicles, incl. platoon with 2 new arrivals,departs during this interval
Q0 = 2

June 2011 DISC School: traffic control 38
platoon based models• platoon = group of vehicles travelling close
together at approximately same speed
• platooni at time t characterized by
= (ni(t) = number of vehicles in platoon i,
ℓi(t) = last sensor location passed by head of platoon i,
i,head(t), i,tail(t) times at which head/tail of platoon i passed (or will pass) this location ℓi(t) )

June 2011 DISC School: traffic control 39
• event based models, with as events:– arrival times of platoons at entrance points – passage time of heads of platoon at sensor
locations, and at intersections– G/Y/R switching time
• system noise generates random changes in – platoon size traveling though links, or being
split up at intersections– travel time of platoons through links
platoon based models

June 2011 DISC School: traffic control 40
state of system = { complete characterization of all platoons in system
+ size of each queue
+ state of traffic light automata }
platoon based models

June 2011 DISC School: traffic control 41
queueing dynamics: when head of platoon reaches tail of queue add size of arriving platoon
and
while green
subtract size of departing platoon
platoon based models

June 2011 DISC School: traffic control 42
urban traffic: queueing at node
greenred +yellow
vehicle based model
greenred +yellow
platoon based model
a platoon of 4vehicles arrives during this interval of time
a platoon of 8 vehicles, incl. 2 separate arrivals,departs during this interval
Q0 = 2

June 2011 DISC School: traffic control 43
coordination and anticipation• trajectory shown in previous example:
very badly synchronized traffic lights! – starvation: traffic light green when queue empty and
no arriving platoon– predictable, large platoons arrive at red light
long queues at next R/Y/G switch extra delay due to
acceleration of vehicles

June 2011 DISC School: traffic control 44
c-rule
myopic (suboptimal) strategy applies c-rule:
switch to that phase in cycle of traffic light that on the average
provides
largest instantaneous reduction of backlog of waiting vehicles
optimal only under unrealistic assumptions

June 2011 DISC School: traffic control 45
simple case study for coordination
arrival streamEW
arrival stream SN
one-way traffic no loops!

June 2011 DISC School: traffic control 46
simple case study for coordination
arrival streamEW
arrival stream SN

June 2011 DISC School: traffic control 47
good feedback control actions
• feedback control strategies under investigation should adapt switching times of traffic lights to arrival times of platoons of vehicles
• need information about approaching platoons
• why deviate from c-rule?– loss at yellow period don't switch too often– avoid acceleration delay – avoid long queues blocking upstream intersections

June 2011 DISC School: traffic control 48
intuitively model to be used in design and coordination control strategy depends strongly on load:– light load only requires anticipation, no
coordination needed– near saturation: both anticipation and
coordination needed, due to stochasticity– saturated system need not take into account
stochastic phenomena, coordination important
urban traffic: arrival streamcoordination and anticipation

June 2011 DISC School: traffic control 49
urban traffic: very light load
• switch traffic light to green only when platoon is approaching
• probability of arriving platoon in conflicting direction is negligible during this green period
• almost all platoons pass without any queueing or acceleration delay
• no coordination among neighboring intersections needed (not even a common cycle
time is necessary)

June 2011 DISC School: traffic control 50
what to do as traffic load increases?
• rush hour builds up by congesting a few "critical intersections"
• coordination between switching times of traffic light at neighbouring intersections must– avoid waste of capacity due to starvation at critical
intersections– thus preventing spread of congestion as long as
possible
June 2011 DISC School: traffic control 51
supervisor selects critical intersections
• delay along heavily loaded origin-destination pairs of traffic flow will cause greatest risk for spreading congestion
• critical intersections where two heavily loaded OD-pairs cross each other,
must act as "master" control agent imposing extra rules on neighboring "slave" control agents

June 2011 DISC School: traffic control 52
supervisor selects critical intersections
• supervisor acts on slower time scale than local controllers
• supervisor uses average arrival rates per OD pair
• average waiting time argument was based on stationary regime, covering several cycles of the traffic lights

June 2011 DISC School: traffic control 53
controller interaction near saturation
controller at critical intersection selects GYR switching time so that– red-green cycle within bounds imposed by
supervisor– minimize waste of capacity due to starvation
model used in control design (e.g. for MPC) must allow prediction of arrival times of platoons at intersections
June 2011 DISC School: traffic control 54
traffic model for coordination control
for heavy load
• timed Petri net (or timed automaton) model each intersection, with coloured tokens
• token value = size of platoon
• random delay model for road

June 2011 DISC School: traffic control 55
simple case study for coordination
arrival streamEW
arrival stream SN
critical intersection

June 2011 DISC School: traffic control 56
state based cordination control
• local feedback controller needs estimate of expected arrival time and size of all platoons approaching intersection
• to be estimated from on-line data obtained from sensors, using recursive Bayesian filter, e.g. particle filter

June 2011 DISC School: traffic control 57
particle based optimization
• local coordinating control agent requires information on estimated current local state
select switching time of traffic lights so that – (supervisory design) specifications are met– (optimal team theory) delays are minimized
for model based predictions for most likely trajectories of platoons

June 2011 DISC School: traffic control 58
design of coordinating and anticipating controller
• controller at "master" intersection informs neighbors of earliest/latest time [en,ln] they should send next n-th platoon so that master can meet all its specifications without any waste of capacity
• taking into account travel times along links • requires solution of large set of linear inequalities
(e.g. via distributed CSP)
June 2011 DISC School: traffic control 59
artificial platoons and abstraction
• modeling: reduce complexity of combinatorial problem by grouping vehicles into larger platoons that travel together as "indivisible atoms"
• operational implementation: merge small platoons together in one large platoon behind red traffic lights at non-critical intersections
June 2011 DISC School: traffic control 60
• proposed approach attempts to control behavior (arrival times) of vehicles without active roadside2vehicle
communication
• proposed approach may indirectly force vehicles to merge into platoons
design of coordinating and anticipating controller

June 2011 DISC School: traffic control 61
congested traffic
under very heavy load average streams of traffic already
lead to congestion of network:
controllers must stabilize deterministic system
described by fluid flow model

June 2011 DISC School: traffic control 62
urban traffic: congested mode
• cycle time fixed to maximal allowable value (pedestrians; blocking upstream intersections)
• local control decision: allocate green fraction for each phase to reduce as much as possible the total queue size, averaged per cycle,
• using as information the locally observed arrival rates in each direction

June 2011 DISC School: traffic control 63
urban traffic: congested mode
• supervisor decision: impose common cycle length to intersections, and locally optimal R/G split, using information on inflow rates at edges of network
• communication between neighboring agents only to avoid starvation, by selecting offset between traffic lights at neighboring intersections (adapt to travel time along link)

June 2011 DISC School: traffic control 64
traffic model for coordinating control for congested traffic
• fluid flow model, e.g. fluid Petri net
• analysis simplified: congestion means that token load in many places always > 0, i.e. many transitions always enabled

June 2011 DISC School: traffic control 65
conclusions
• progress in application of distributed supervisory control by selecting simple examples where
coordination
can significantly improve performance
• simple case study confirms philosophy of
• robustly optimizing local actions
• coordination through exchange of specifications
June 2011 DISC School: traffic control 66
thanks for the patience!
questions?