juan pablo carbajal quantifying m.c. - heronrobots · juan pablo carbajal chain robot & s.a....
TRANSCRIPT

04.2009 Morphological Computation 1
Juan Pablo Carbajal
Quantifying M.C.Contents
– Introduction
– WandaX: Environmental Energy Harvesting
– Puppy: Agent-Environment Interaction, Efficiency
– Chain Robot: Passive Folding and AI
– Self-Assembly: Passive Assembly and AI
Underlying Concepts
– Reproducibility
– Parametric Robots
– Minimal Approach: “Simple not simpler”

04.2009 Morphological Computation 2
Juan Pablo Carbajal
The A.I. Lab (aka the coolest place)
04.2009 Morphological Computation 3
Juan Pablo Carbajal
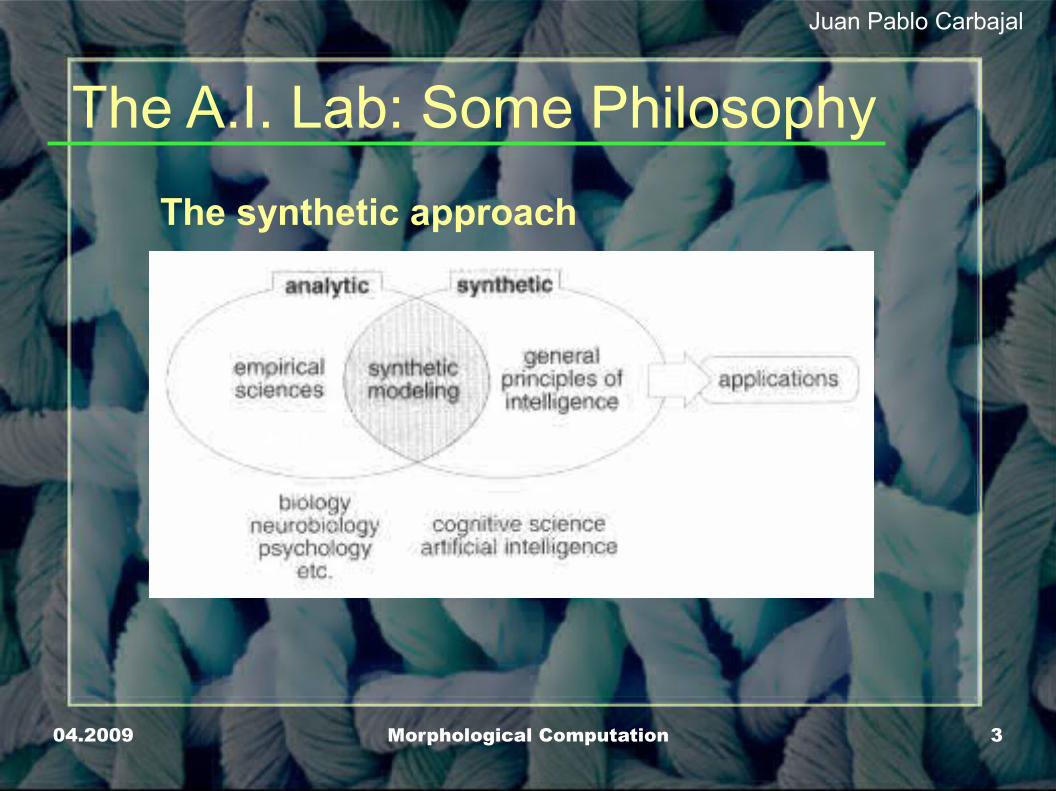
The A.I. Lab: Some Philosophy
The synthetic approach
04.2009 Morphological Computation 4
Juan Pablo Carbajal
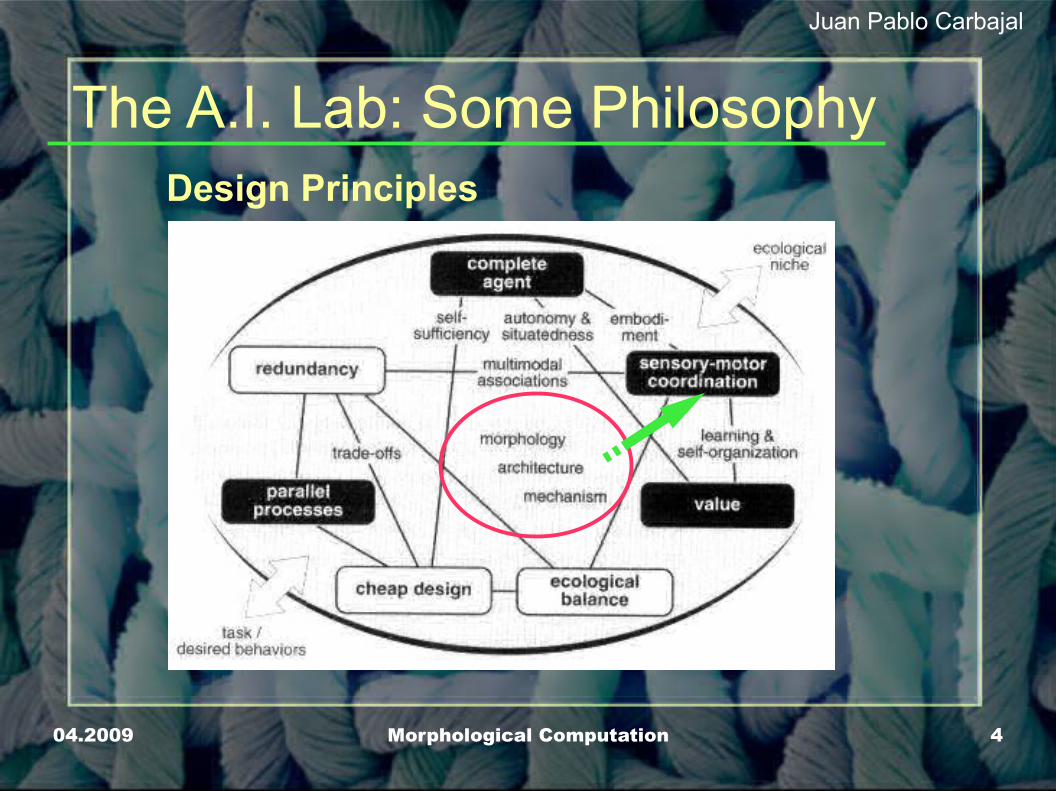
The A.I. Lab: Some PhilosophyDesign Principles
04.2009 Morphological Computation 5
Juan Pablo Carbajal
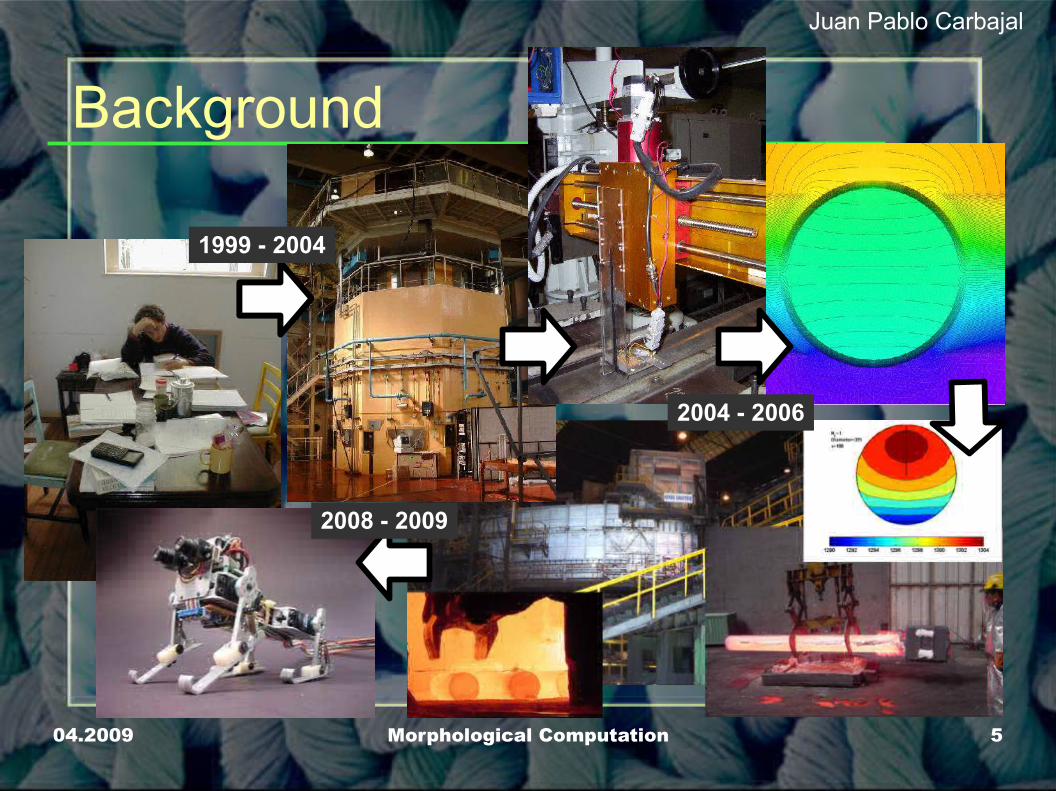
Background
1999 - 2004
2004 - 2006
2008 - 2009

04.2009 Morphological Computation 6
Juan Pablo Carbajal
Active Projects
– WandaX: Environmental Energy Harvesting.
– Puppy: Agent-Environment Interaction, Efficiency.
– Chain Robot: Passive Folding and AI.
– Self-Assembly: Passive Assembly and AI.
4 projects will be presented here. Each project has its own objective but all of them share a common principle:
What can morphology do for us?

04.2009 Morphological Computation 7
Juan Pablo Carbajal
WandaX: Energy Harvesting“ ... live trout can Kármán gait temporarily without any axial muscle
activity. Consequently, dead trout towed behind a cylinder can generate thrust passively
and move upstream on a slack line when the natural resonance of their body allows for synchronization with vortices.”
A review of fish swimming mechanics and behavior in altered flows
Phil. Trans. R. Soc. B (2007) 362, 1973-1993. doi: 10.1098/rstb.2007.2082

04.2009 Morphological Computation 8
Juan Pablo Carbajal
WandaX: Energy HarvestingIn collaboration with Marc Ziegler (the robot builder) and Tobi Delbrück.
Video !

04.2009 Morphological Computation 9
Juan Pablo Carbajal
WandaX: Energy Harvesting
D. N. BEAL, F. S. HOVER, M. S. TRIANTAFYLLOU, J. C. LIAO and G. V. LAUDER (2006). Passive propulsion in vortex wakes. Journal of Fluid Mechanics, 549 , pp 385-402doi:10.1017/S0022112005007925

04.2009 Morphological Computation 10
Juan Pablo Carbajal
Puppy: Gait EfficiencyIn collaboration with Matěj Hoffmann (the great Logician) and Harold
Martinez Salazar.

04.2009 Morphological Computation 11
Juan Pablo Carbajal
Puppy: Gait Efficiency● Gait as an emergent behavior from interacting local controllers.
The body of the robot and the environment act as the medium where information is transferred (with processing).

04.2009 Morphological Computation 12
Juan Pablo Carbajal
Puppy: Gait Efficiency
Video !
Video !
● The legs of the robot are considered transducers and we focus on their design. Get the maximum out of morphology.

04.2009 Morphological Computation 13
Juan Pablo Carbajal
Puppy: Gait EfficiencyIO Spring Filtered
04.2009 Morphological Computation 14
Juan Pablo Carbajal
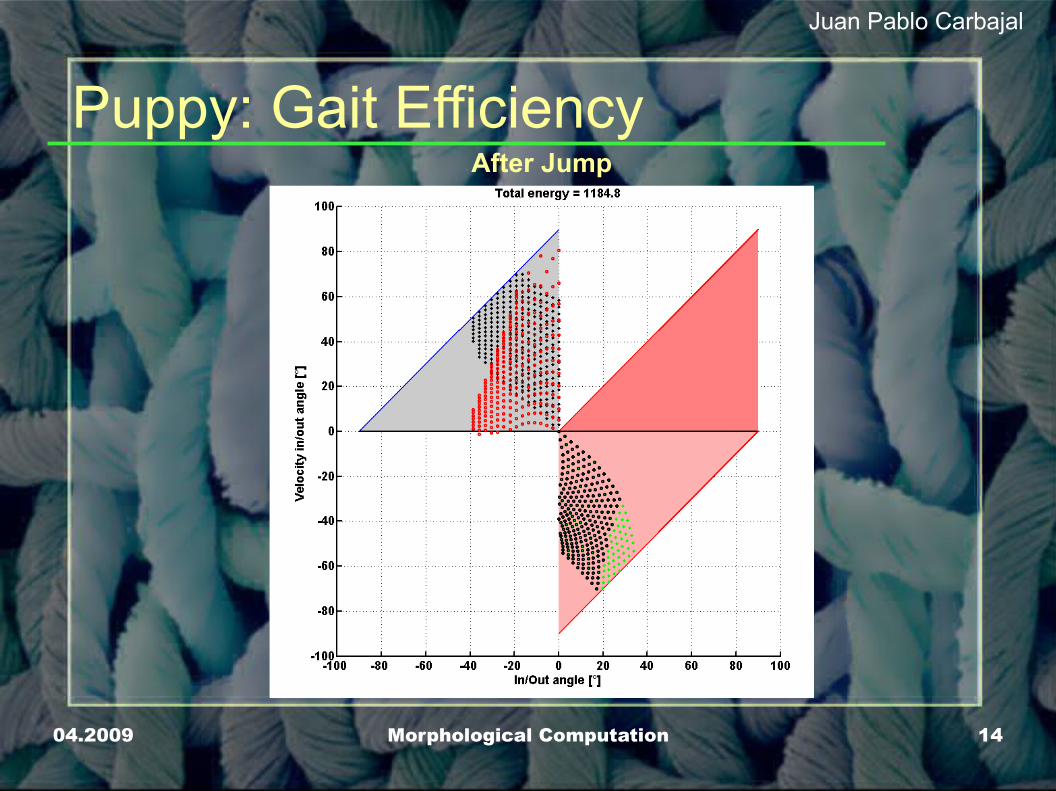
Puppy: Gait EfficiencyAfter Jump

04.2009 Morphological Computation 15
Juan Pablo Carbajal
Puppy: Gait EfficiencyIterated Map
● ~ 20% compression.
● 80 kg
● ~3 Hz
● Fixed landing angle

04.2009 Morphological Computation 16
Juan Pablo Carbajal
Puppy: Gait Efficiency
Video !
04.2009 Morphological Computation 17
Juan Pablo Carbajal
Puppy & WandaX
● Morphology as a tool to reduce computation and power consumption.
● Parametric robots used as experimental platforms. Reproducibility allows repeated experiments.
● Strong support from simulations.
● Once a configuration produces satisfactory results a final version of the robot is built.
04.2009 Morphological Computation 18
Juan Pablo Carbajal
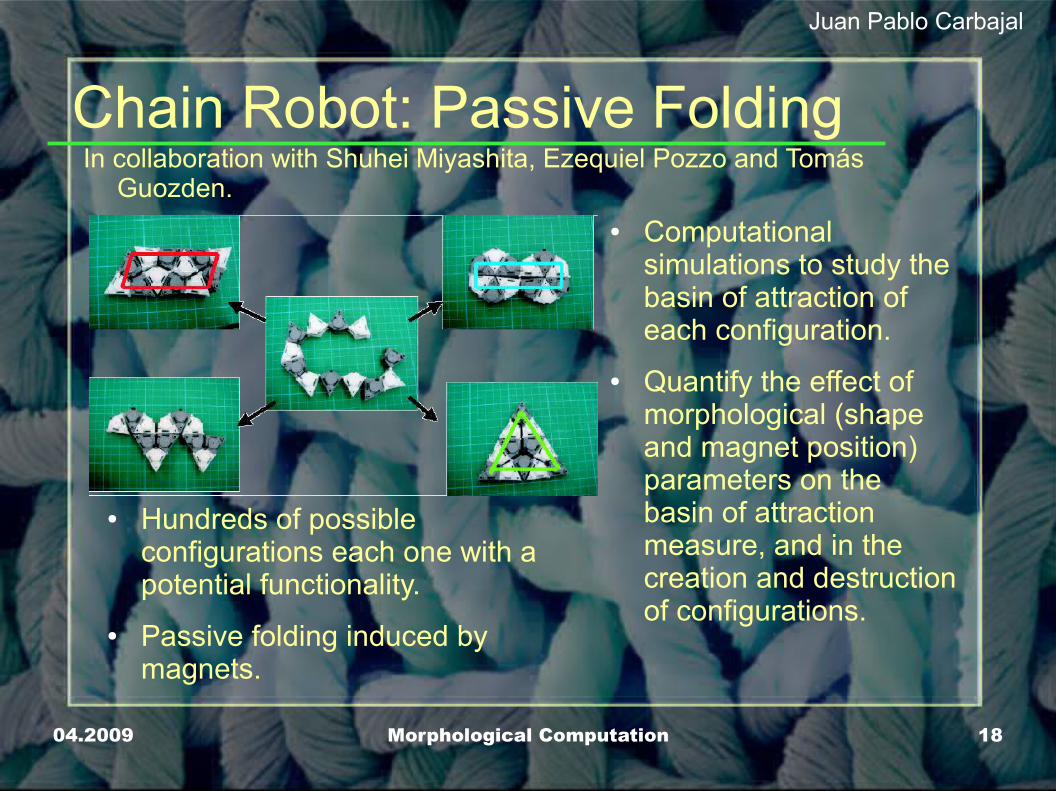
Chain Robot: Passive FoldingIn collaboration with Shuhei Miyashita, Ezequiel Pozzo and Tomás
Guozden.
● Computational simulations to study the basin of attraction of each configuration.
● Quantify the effect of morphological (shape and magnet position) parameters on the basin of attraction measure, and in the creation and destruction of configurations.
● Hundreds of possible configurations each one with a potential functionality.
● Passive folding induced by magnets.

04.2009 Morphological Computation 19
Juan Pablo Carbajal
Chain Robot: Passive Folding
● Possible folded states depend strongly on shape.
● How can we quantify this effect? Idea: Yield ratio.

04.2009 Morphological Computation 20
Juan Pablo Carbajal
Chain Robot: Passive Folding
● Actuation as perturbation allowing prohibited transitions.
● Exploration? Learning? Sensory-motor coordination?

04.2009 Morphological Computation 21
Juan Pablo Carbajal
Chain Robot: Passive Folding

04.2009 Morphological Computation 22
Juan Pablo Carbajal
Chain Robot: Passive Folding● How do we implement function/behavior?
04.2009 Morphological Computation 23
Juan Pablo Carbajal
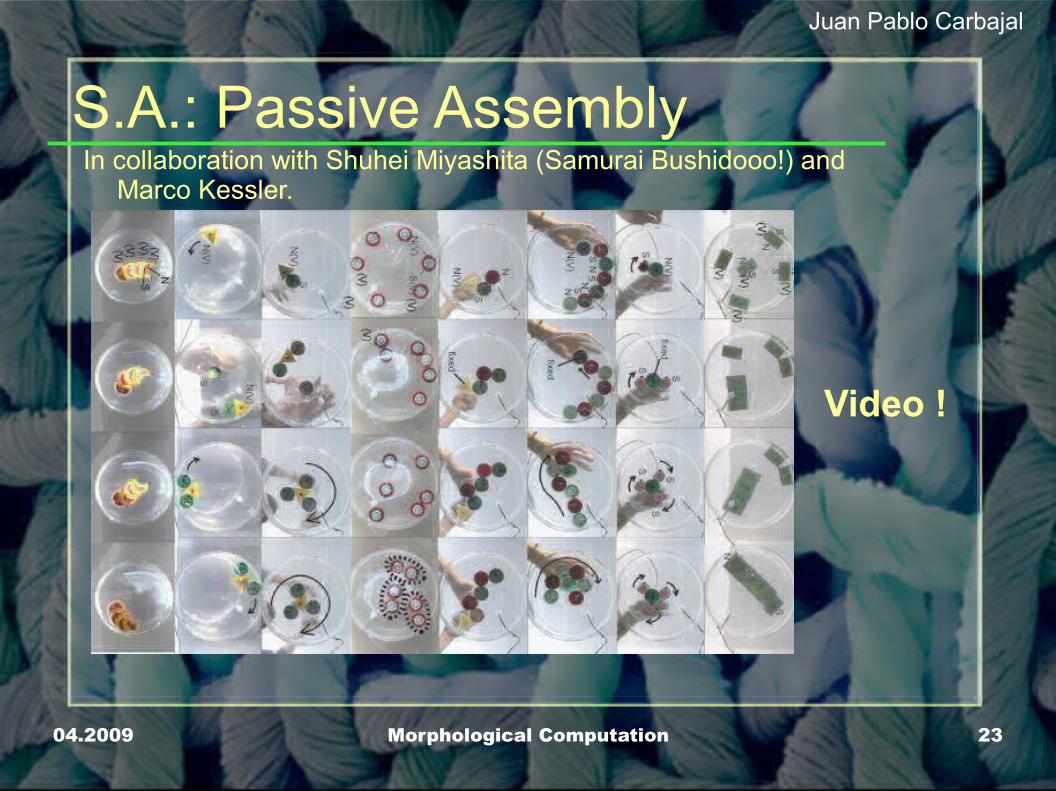
S.A.: Passive AssemblyIn collaboration with Shuhei Miyashita (Samurai Bushidooo!) and
Marco Kessler.
Video !

04.2009 Morphological Computation 24
Juan Pablo Carbajal
S.A.: Passive Assembly
04.2009 Morphological Computation 25
Juan Pablo Carbajal
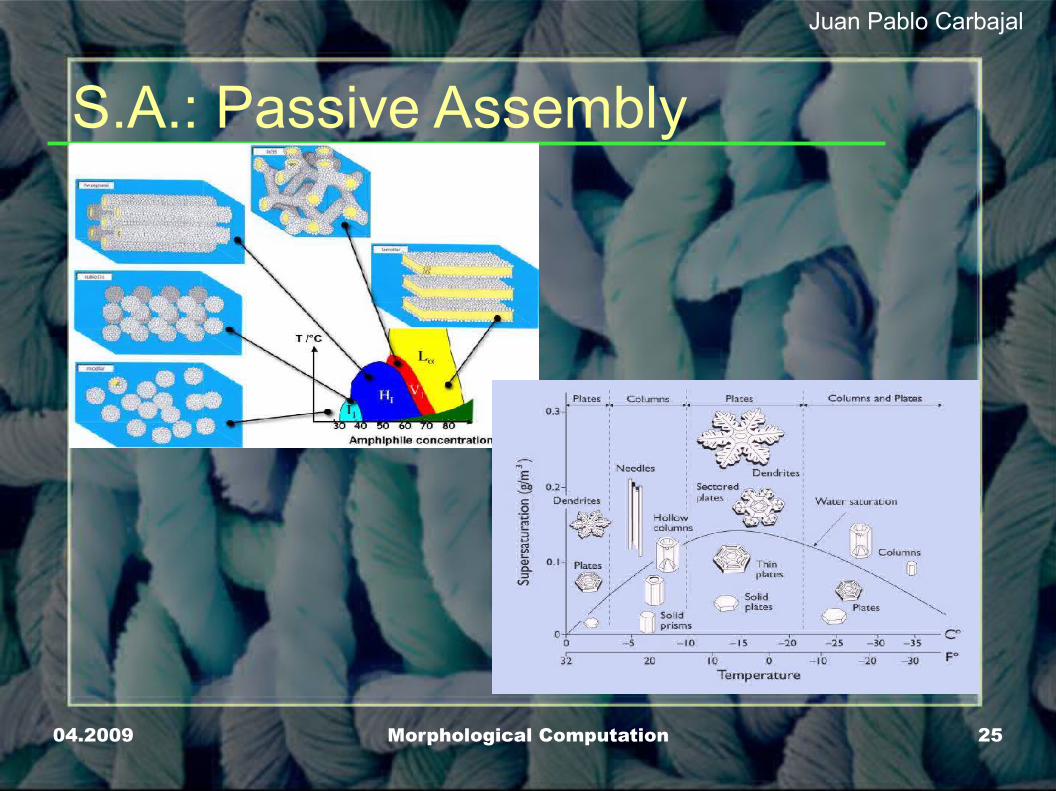
S.A.: Passive Assembly
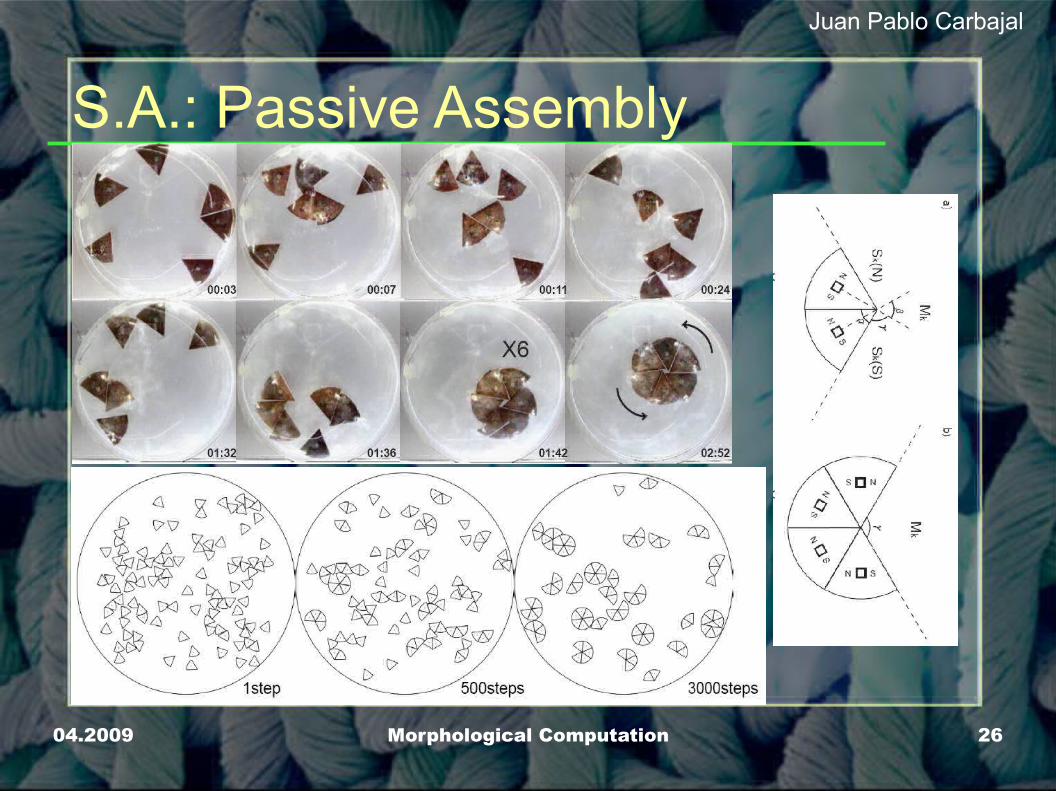
04.2009 Morphological Computation 26
Juan Pablo Carbajal
S.A.: Passive Assembly
04.2009 Morphological Computation 27
Juan Pablo Carbajal
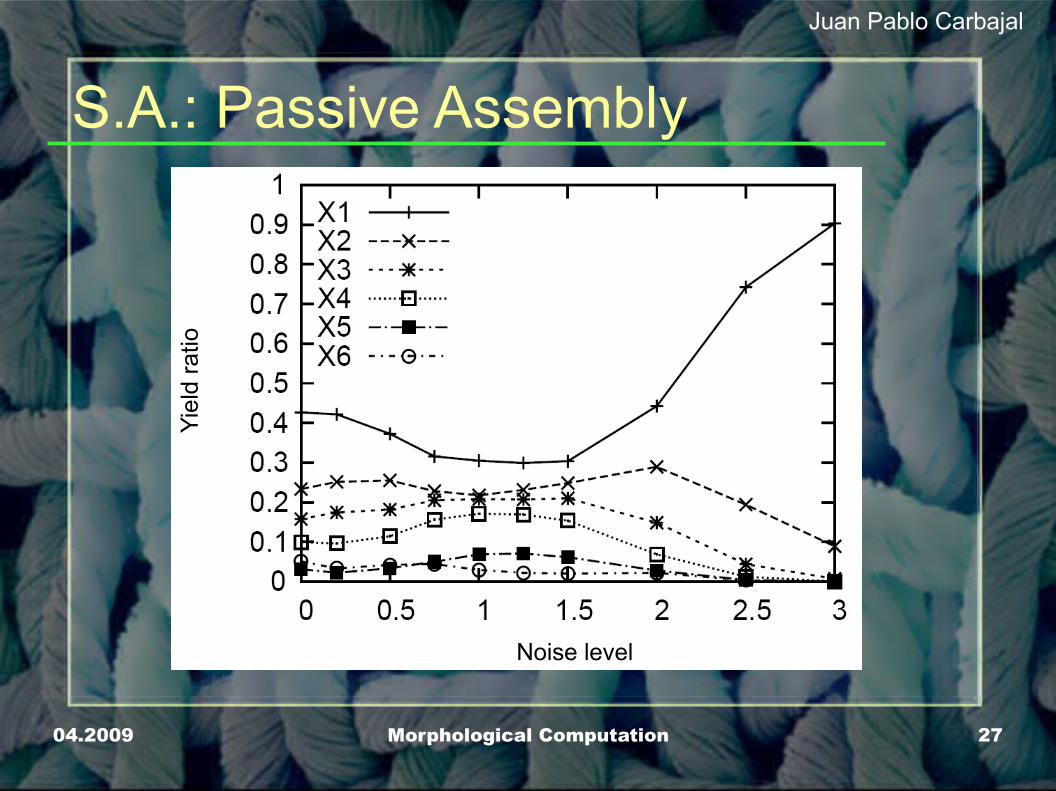
S.A.: Passive Assembly
Noise level
Yie
ld r
atio

04.2009 Morphological Computation 28
Juan Pablo Carbajal
Chain Robot & S.A.
● Macroscopic systems can be studied with the same tools used with microscopic ones.
● Morphology plays a fundamental role in the behavior of the system.
● Exploiting morphology and the natural dynamics of the system can produce extreme interesting behavior with very simple “brains”.
● Important engineering challenges like the development of novel actuators.

04.2009 Morphological Computation 29
Juan Pablo Carbajal
Questions
Thank you very much
Please visit our website www.ailab.ch