j. besson centre des matériaux, École des mines de paris,...
TRANSCRIPT
Non linear finite element method
J. BessonCentre des Matériaux, École des Mines de Paris,
UMR CNRS 7633, BP 87 Evry cedex 91003
Non linear finite element method 1
Introduction — Outline
• The finite element method
• Application to mechanics
• Solving systems of non linear equations
• Incompressibility
Introduction 2
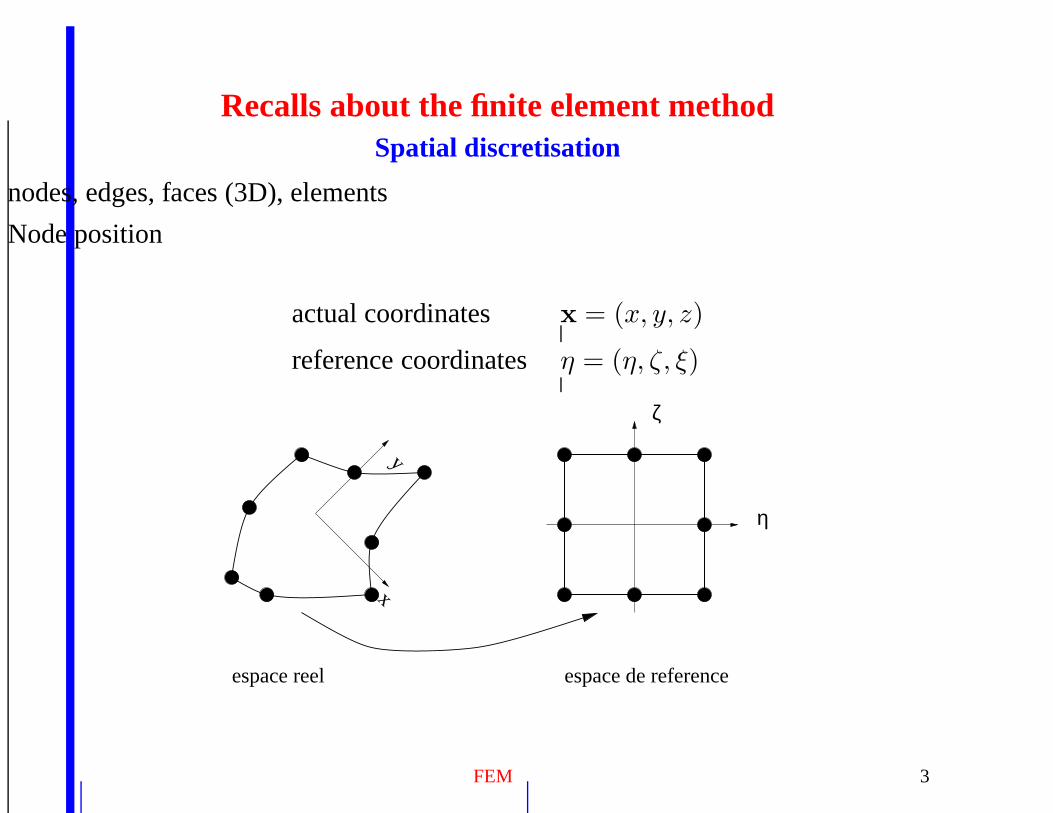
Recalls about the finite element methodSpatial discretisation
nodes, edges, faces (3D), elements
Node position
actual coordinates x = (x, y, z)
reference coordinates η = (η, ζ, ξ)
η
ζ
xy
espace reel espace de reference
FEM 3
Coordinates of the nodes belonging to one element:
xi, i = 1 . . . N
x =∑
i
N i(η)xi
N i interpolation function (or shape functions) such that:
N i(ηj) = δij et∑
i
N i(η) = 1, ∀η
Jacobian matrix of the transformation η → x(η)
J∼
=∂x
∂η
Jij =∂xi
∂ηj
=∂(Nkxk
i )
∂ηj
= xki
∂Nk
∂ηj
Jacobian:J = det(J
∼)
FEM 4
Discrete integration methods
• Gauss method 1D∫ 1
−1
f(x)dx = wif(xi)
xi positions where the function is evaluated
wi weight associated to the Gauss points
A Gauss integration with n Gauss points can exactly eval-
uate the integral of a 2n − 1 order polynom.
• Extension to 2D and 3D cases.
Gauss points are very important in the case of the non linear FEM as
the material behavior is evaluated at each Gauss point. State variables
must be stored for each Gauss point
FEM 5
Integral over one finite element Ve (reference element Vr)∫
Ve
f(x)dx =
∫
Vr
f(η)Jdη =∑
i
f(ηi)(Jwi)
It is possible to define the volume associated to a given Gauss point i:
vi = Jwi
FEM 6
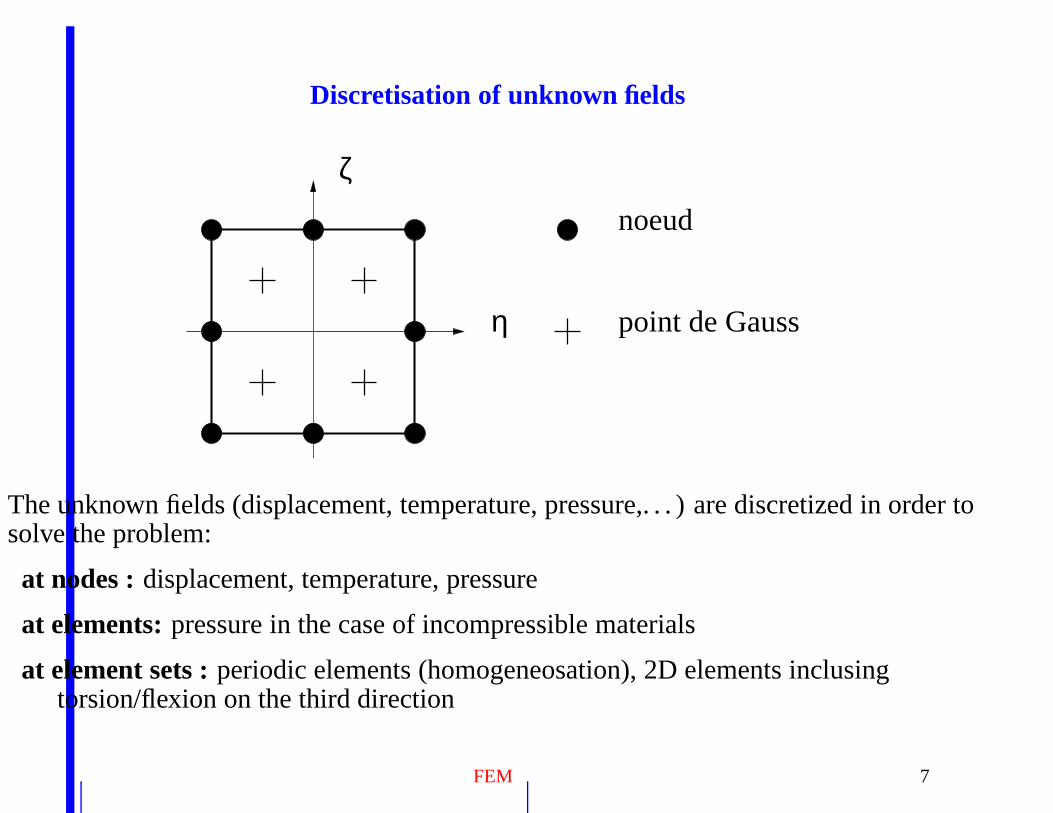
Discretisation of unknown fields
η
ζ
noeud
point de Gauss
The unknown fields (displacement, temperature, pressure,. . . ) are discretized in order tosolve the problem:
at nodes : displacement, temperature, pressure
at elements: pressure in the case of incompressible materials
at element sets : periodic elements (homogeneosation), 2D elements inclusingtorsion/flexion on the third direction
FEM 7
• Mechanics (ui displacement at node i)
u(η) = Nk(η)uk
• Thermal problem (T : temperature) :
T (η) = N i(η)T i
• Computation of the gradients:
(grad∼
u)ij =∂ui
∂xj
=∂ui
∂ηk
∂ηk
∂xi
= uni
∂Nn
∂ηk
∂ηk
∂xi
(gradT )i =∂T
∂xi
=∂T
∂ηk
∂ηk
∂xi
= Tn ∂Nn
∂ηk
∂ηk
∂xi
These formula can be rewritten in a compact form as:
grad∼
u
= [B] . u
gradT = [A] . T
FEM 8
u and T are vectors of nodal variables:
u =
u11
u12
u13
...
uN1
uN2
uN3
T =
T 1
...
TN
Isoparametric elements Isoparametric elements are el-
ements for which the unknowns and the coordinates are
interpolated using the same shape functions.
FEM 9
Voigt Notations
grad∼
u
= [B] . u ???
• The Voigt Notation is in fact used
• standard notation / recommanded notation :
ε∼
=
ε11
ε22
ε33
2ε12
2ε23
2ε31
, σ∼
=
σ11
σ22
σ33
σ12
σ23
σ31
x∼
=
x11
x22
x33√2x12√2x23√2x31
FEM 10
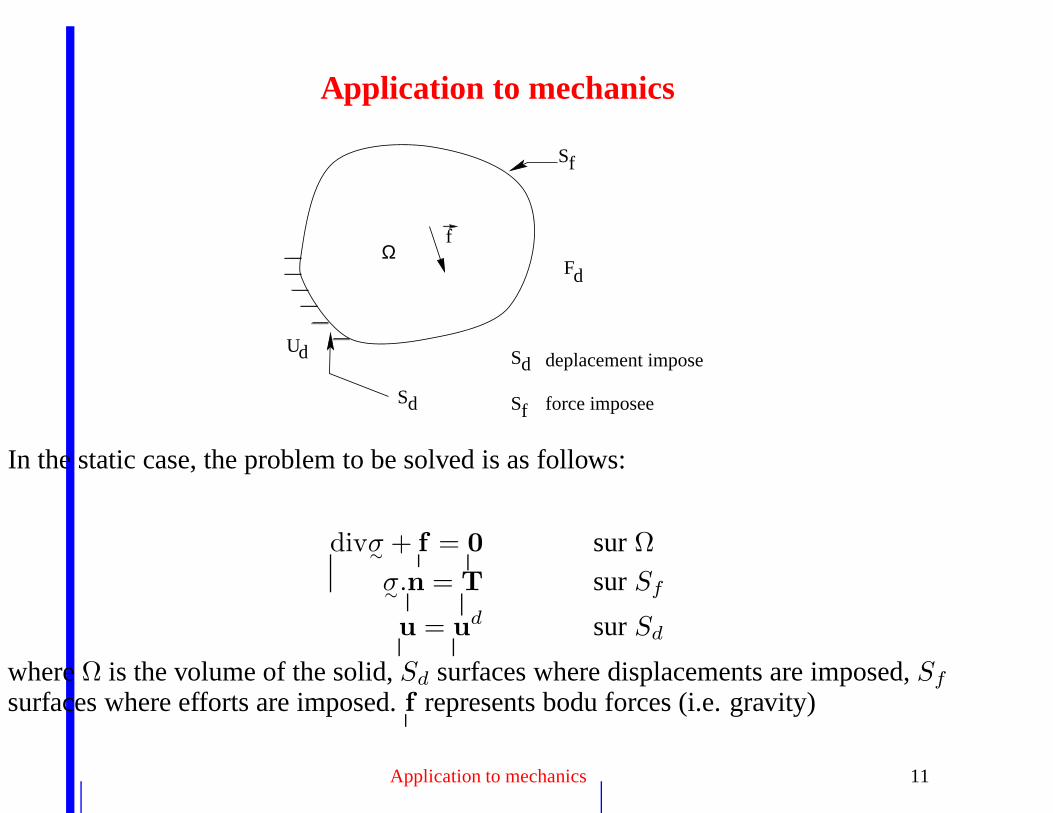
Application to mechanics
Ud
Fd
Sd
Sf
deplacement impose
force imposee
Sd
Sf
Ωf
In the static case, the problem to be solved is as follows:
divσ∼
+ f = 0 sur Ω
σ∼.n = T sur Sf
u = ud sur Sd
where Ω is the volume of the solid, Sd surfaces where displacements are imposed, Sf
surfaces where efforts are imposed. f represents bodu forces (i.e. gravity)
Application to mechanics 11
Principle of virtual work
• Statically admissible stress field: A stress field σ∼
∗ is statically admissible if:
divσ∼
∗ + f = 0 on Ω
σ∼
∗.n = Fd on Sf
• Kinematically admissible displacement field: A displacement field u′ is
kinematically admissible if:
u′ = u
d sur Sd
Application to mechanics 12
• Principle of virtual work: Let σ∼
∗ be a statically admissible stress field and let u′ be akinematically admissible displacement field
∫
Ω
σ∼
∗ : ε∼
′dΩ =
∫
Ω
f .u′dΩ +
∫
S
T.u′dS
ε∼
′ =1
2
(
(grad∼
u′) + (grad
∼
u′)T)
Le left hand side corresponds to the internal virtual work and the right handside tothe external virtual work.
Application to mechanics 13
Equilibrium (MEF)
• The discretized displacement field is KA
• The associated stress field is not necessarily SA (σ∼(ε∼(~u))))
• Solving the problem: Find the displacement fiel such that the associated stress fieldverifies the PVW.
Application to mechanics 14
Discretisation of the PVW : internal virtual work
wi ≡ Fi(u) . u′
=
∫
Ω
σ∼(u) : ε
∼(u′)dV
=∑
e
∫
Ve
σ∼(ue)
. [B] . ue′ dV
=∑
e
(∫
Ve
[B]T
.
σ∼(ue′)
dV
)
. ue′
=∑
e
F ei . ue′
σ . [B] . ue′ = σiBij ue′j = σiB
Tjiu
e′j =
(
BTjiσi
)
ue′j
Application to mechanics 15

Discretisation of the PVW : external virtual work (imposed volume forces)
we ≡ Fe(u) . u′
=
∫
Ω
f .u′dV
=∑
e
∫
Ve
f . [N ] . ue′ dV
=∑
e
(∫
Ve
[N ]T
.fdV
)
ue′
=∑
e
F ee . ue′
Application to mechanics 16
Resolution
wi = we
⇒ Fi(u) . u′ = Fe(u) . u′ ∀ u′
⇒ Fi(u) = Fe(u)
This system can be solved using an iterative Newton method (in the following) whichrequires the calculation of:
[K] =∂ Fi(u)
∂ uNote that
[Ke] =∂ F e
i (ue)∂ ue
=
∫
Ve
[B]T .∂
σ∼
∂
ε∼
.∂
ε∼
∂ uedV =
∫
Ve
[B]T .[
L∼∼
c
]
. [B] dV
Application to mechanics 17
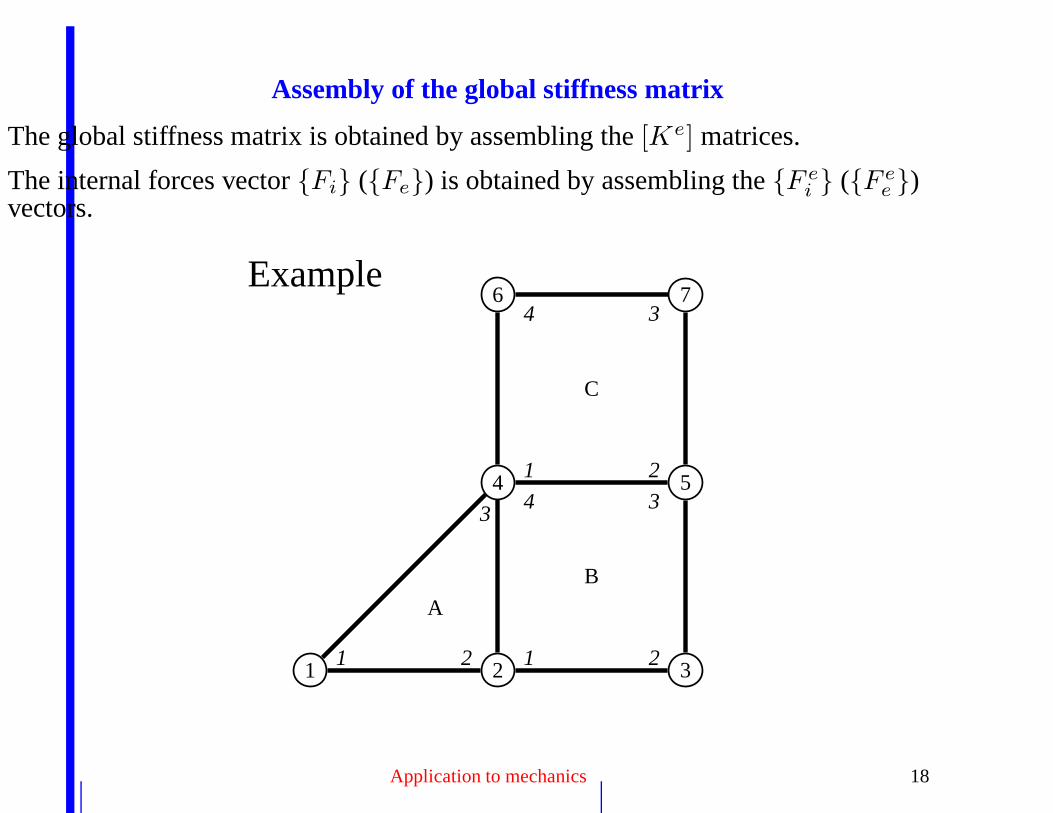
Assembly of the global stiffness matrix
The global stiffness matrix is obtained by assembling the [Ke] matrices.
The internal forces vector Fi (Fe) is obtained by assembling the F ei (F e
e )vectors.
Example
1 2 3
4 5
6 7
A
B
C
1 2
3
1 2
34
1 2
34
Application to mechanics 18
u =
u1x, u1
y, u2x, u2
y, u3x, u3
y, u4x, u4
y, u5x, u5
y, u6x, u6
y, u7x, u7
y
For element A, the local unknown vector
uA
is:
uA
=
uA1x , uA1
y , uA2x , uA2
y , uA3x , uA3
y
=
u1x, u1
y, u2x, u2
y, u4x, u4
y
The associated internal forces vector associated to element A is:
FAi
=
FA1x , FA1
y , FA2x , FA2
y , FA3x , FA3
y
Application to mechanics 19
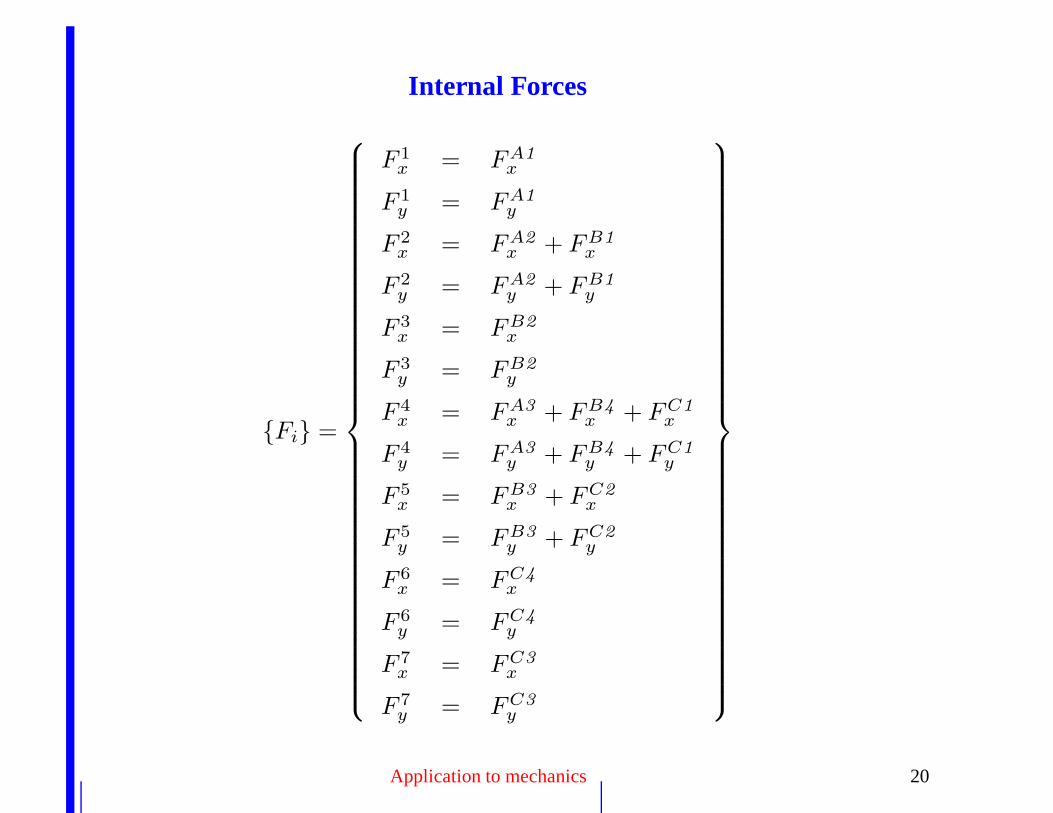
Internal Forces
Fi =
F 1x = FA1
x
F 1y = FA1
y
F 2x = FA2
x + FB1x
F 2y = FA2
y + FB1y
F 3x = FB2
x
F 3y = FB2
y
F 4x = FA3
x + FB4x + FC1
x
F 4y = FA3
y + FB4y + FC1
y
F 5x = FB3
x + FC2x
F 5y = FB3
y + FC2y
F 6x = FC4
x
F 6y = FC4
y
F 7x = FC3
x
F 7y = FC3
y
Application to mechanics 20
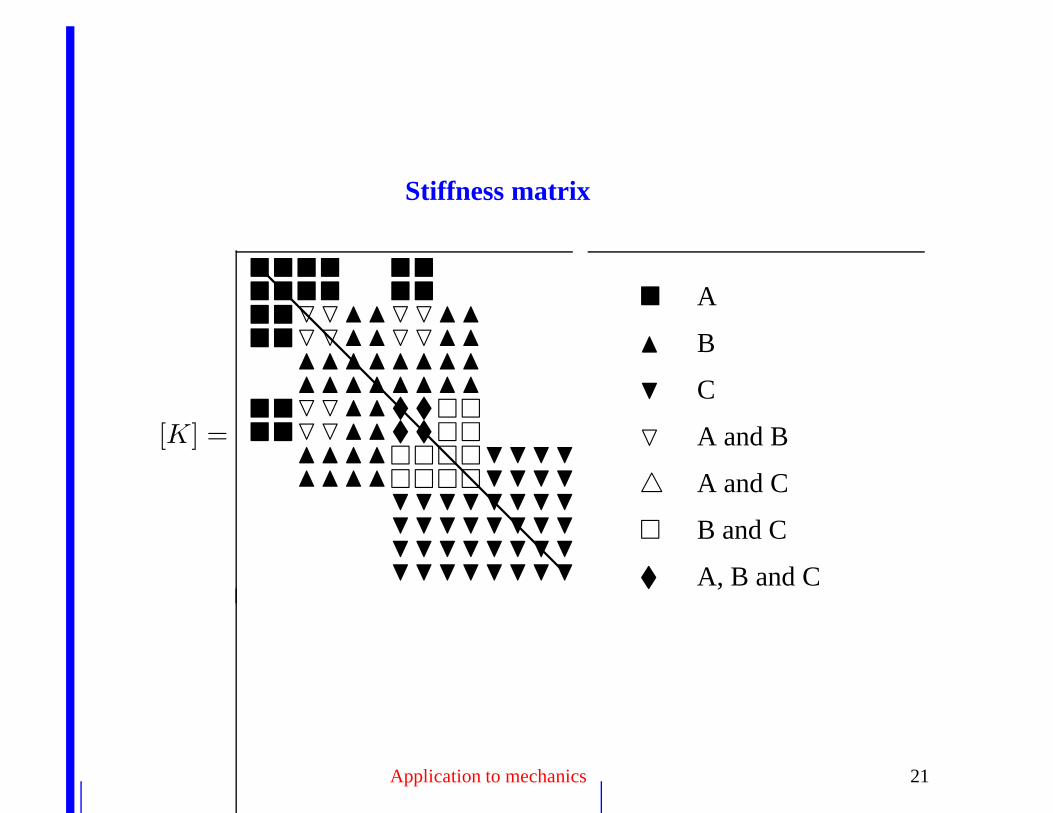
Stiffness matrix
[K] =
OO OONNNNOO OONNNN
NNNNNNNNNNNNNNNN
OONN OONN
NNNNNNNN
HHHHHHHH
HHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHH
A
N B
H C
O A and B
4 A and C
B and C
A, B and C
Application to mechanics 21
Incremental resolutionSmall strain case
• Strong non linearity ⇒ incremental resolution
• current time increment: from t0 to t1, ∆t = t1 − t0
• Many increments may be needed
• Quantities Fi, Fe and [KT ] are computed for each element and assembled. Forinstancen the internal forces foe element e are computed as:
F ei =
∫
Ve
[B]T . σ dV =∑
g
[
BTg
]
. σg (Jgwg)
The elementaty stiffness matrix is computed as:
[Ke] =
∫
Ve
[B]T . [L] . [B] dV =∑
g
[Bg]T . [L] . [Bg] (Jgwg)
• Once assembled vectors Fi and Fe are vectors whose size is the number ofunknown quantities (nd). [K] is a nd × nd matrix.
Application to mechanics 22
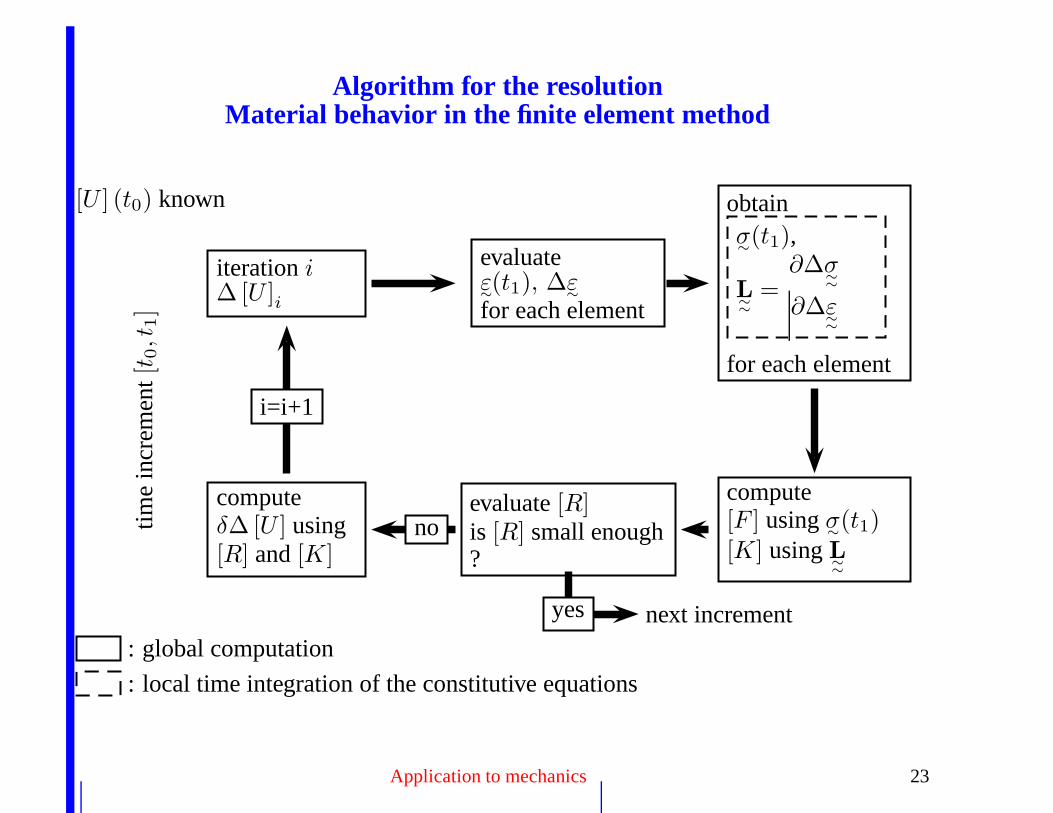
Algorithm for the resolutionMaterial behavior in the finite element method
[U ] (t0) known
time
incr
emen
t[t 0
,t1]
iteration i∆ [U ]i
evaluateε∼(t1), ∆ε
∼
for each element
obtainσ∼(t1),
L∼∼
=∂∆σ
∼∼
∂∆ε∼∼
for each element
compute[F ] using σ
∼(t1)
[K] using L∼∼
evaluate [R]is [R] small enough?
computeδ∆ [U ] using[R] and [K]
i=i+1
no
yes next incrementbox : global computation
box : local time integration of the constitutive equations
Application to mechanics 23
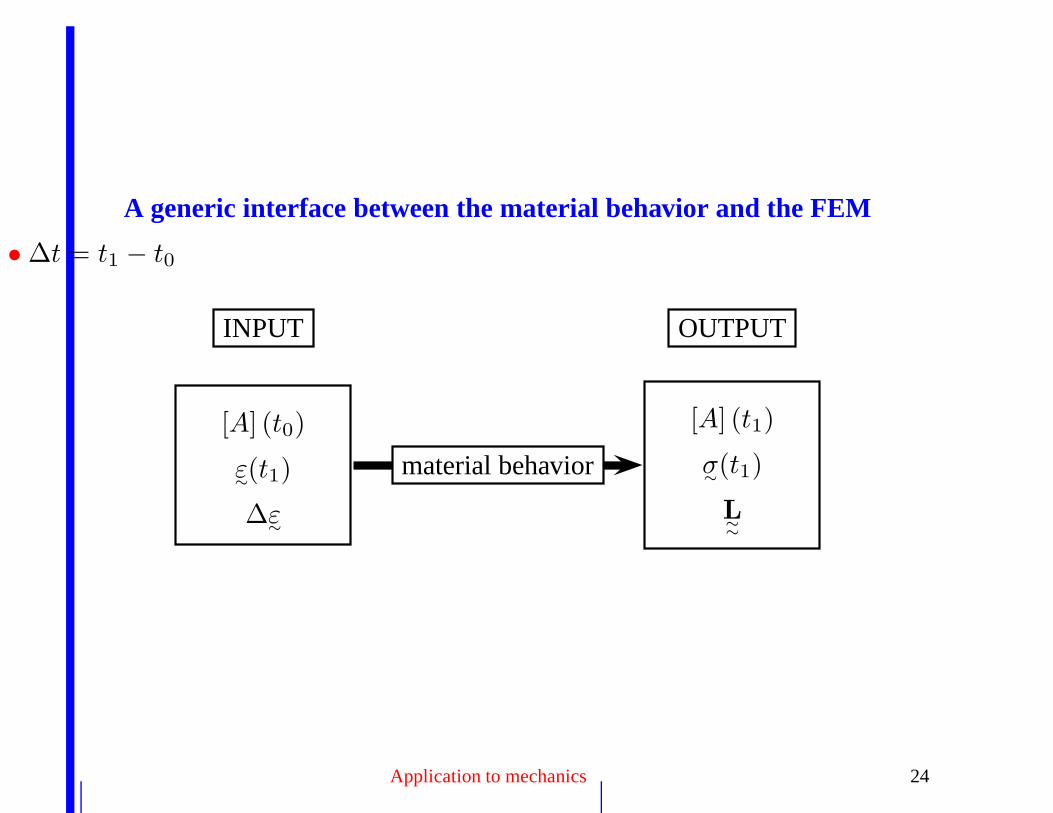
A generic interface between the material behavior and the FEM
• ∆t = t1 − t0
INPUT OUTPUT
[A] (t0)
ε∼(t1)
∆ε∼
[A] (t1)
σ∼(t1)
L∼∼
material behavior
Application to mechanics 24
Numerical methods to solve not linear systems of equationsNon linear equations written as:
R (U) = 0FEM case:
Fi (u) − Fe (u) = 0
Solving not linear systems of equations 25
Newton methods
Linearisation of the system R (U) = 0:
R (U) = R (Uk) +∂ R∂ U
∣
∣
∣
∣
U=Uk
(U − Uk)
(k : iteration number) Notation
[K] (U) =∂ R∂ U Kij(U) =
∂Ri
∂Uj
After resolutionUk+1
= Uk − [K]−1
k Rk
Solving not linear systems of equations 26
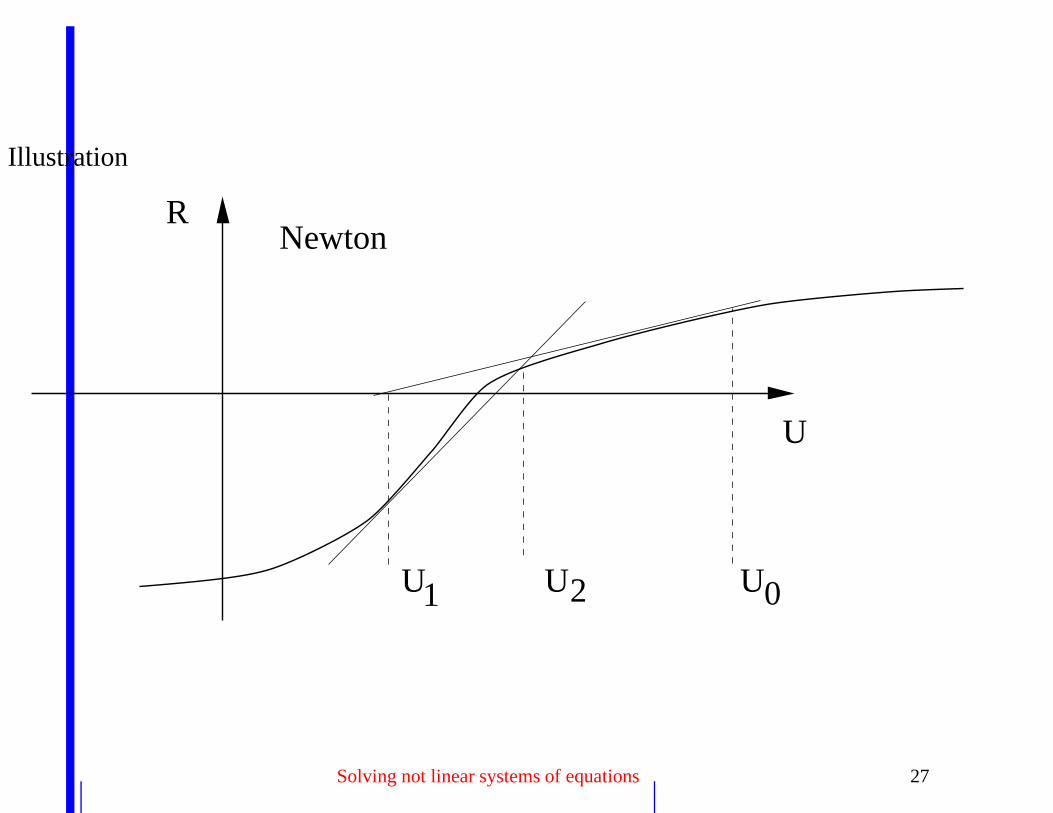
Illustration
R
UU U1 2 0
Newton
U
Solving not linear systems of equations 27
Quasi Newton methods
When the number of unknowns is large:
computational cost of [K]−1
computational cost of R (U) and [K]
−1 Rk
The inverse matrix computed at the first iteration is kept:
Uk+1= Uk − [K]−1
0Rk
Solving not linear systems of equations 28
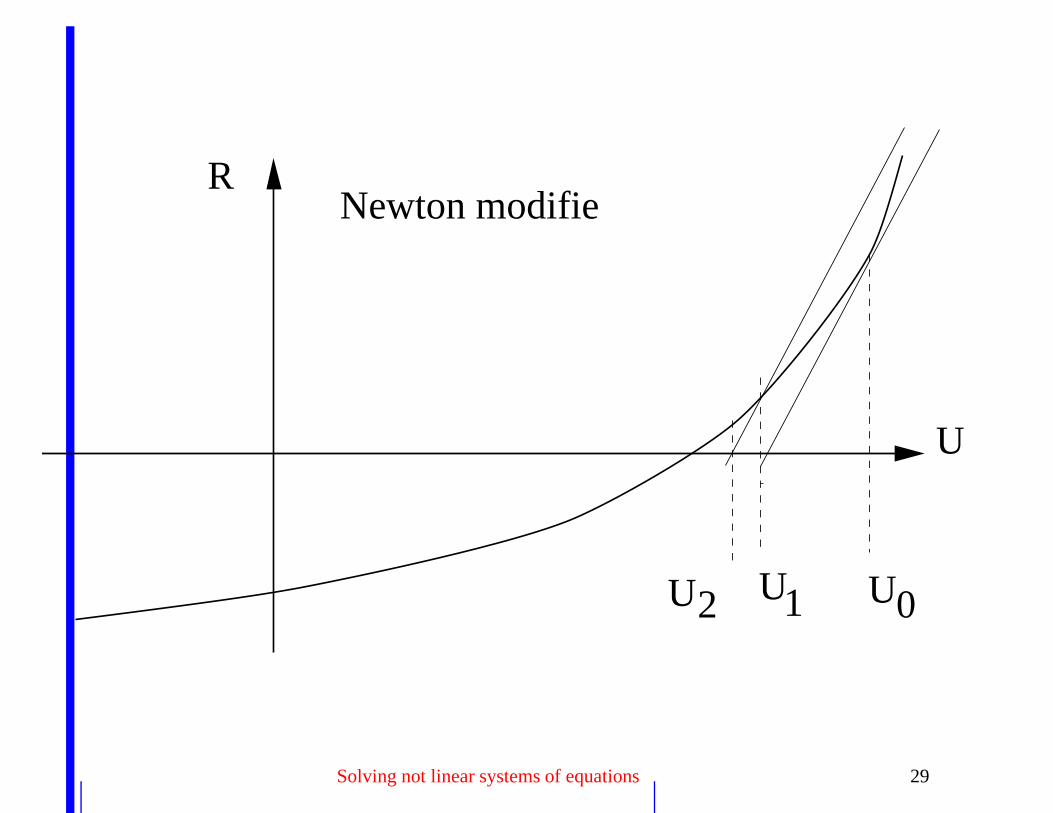
U0U1U2
RNewton modifie
U
Solving not linear systems of equations 29
Other possibilities:
U1
= U0− [K]
−1
0R
0
U2
= U1− [K]−1
1R
1
Uk+1= Uk − [K]
−1
1Rk
Solving not linear systems of equations 30
One unknown case : order of convergence
Fixed Point Method
to be solved (x is scalar):f (x) = 0
Transformation:x = g (x)
Solution : fixed point .
Iterative resolution. x0 is given.xn+1 = g (xn)
Let s be the solution of x = g (x).
If there exits an interval around s such that |g′| ≤ K < 1
then the xn serie converges toward s.
Solving not linear systems of equations 31
To prove this, one first notices that there exists value t (t ∈ [x, s]) such that (Mean ValueTheorem)
g (x) − g (s) = g′ (t) (x − s)
as g (s) = s et xn = g (xn−1), one gets :
|xn − s| = |g (xn−1) − g (s) | ≤ |g′ (t) ||xn−1 − s|≤ K|xn−1 − s|≤ · · · ≤ Kn|x0 − s|
as K < 1, lim→∞ |xn − s| = 0.
Solving not linear systems of equations 32
Order of an iterative method
εn error on xn
xn = s + εn
The Taylor expansion of xn+1 leads to
xn+1 = g (xn) = g(s) + g′(s) (xn − s) +1
2g′′(s) (xn − s)2
= g(s) + g′(s)εn +1
2g′′(s)ε2n
One then gets
xn+1 − g(s) = xn+1 − s = εn+1 = g′(s)εn +1
2g′′(s)ε2n
The Order of an iterative method gives a mesure of its convergence rate. At orde 1 onegets
εn+1 ≈ g′(s)εn
and at order 2
εn+1 ≈ 1
2g′′(s)ε2n
Solving not linear systems of equations 33
Application to the Newton method
In the case of the Newton method, a Taylor expansion around xn is used to find xn+1 :
f (xn+1) = f (xn) + (xn+1 − xn) f ′ (xn) = 0
so that:
xn+1 = xn − f (xn)
f ′ (xn)
This is therefore a fixed point method
g(x) = x − f(x)
f ′(x)
One gets:
g′(x) =f(x)f ′′(x)
f ′(x)
and
g′′(x) =f ′′(x)
f ′(x)− 2
f(x)f ′′(x)2
f ′(x)3+
f(x)f ′′′(x)
f ′(x)2
Note that !!!g′(s) = 0
Solving not linear systems of equations 34
The Newton method is a second order method
In addition there always exist an interval around s such that |g′(s)| < 1. The Newtonmethod always converges provided the start value x0 is close enough to the solution.
Solving not linear systems of equations 35
Application to the quasi Newton method
In that case, one gets:
f (xn+1) = f (xn) + (xn+1 − xn) K = 0
where K is constant. Therefore
xn+1 = xn − f (xn)
K
and
g(x) = x − f(x)
K
and
g′(x) = 1 − f ′(x)
K
As g′(s) 6= 0, this method is a first order method. It converges for K such that:
−1 < 1 − f ′(s)
K< 1
Solving not linear systems of equations 36
Riks methodControl
The “natural” problem control mode is to impose the external forces Fe. This controlworks if the load increases with displacement.
In the case of a limit load, a displacement control is needed.
In the case of snap-back instabilities, a mixte load—a displacement control is needed.
Solving not linear systems of equations 37
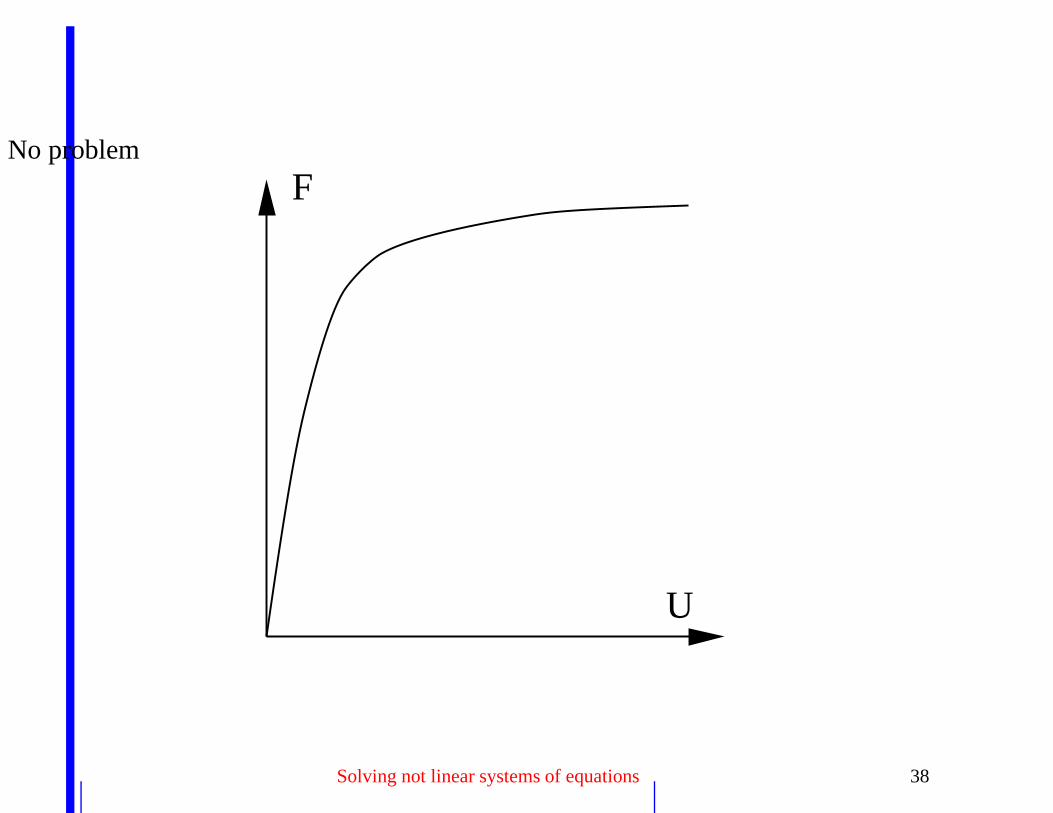
No problem
U
F
Solving not linear systems of equations 38
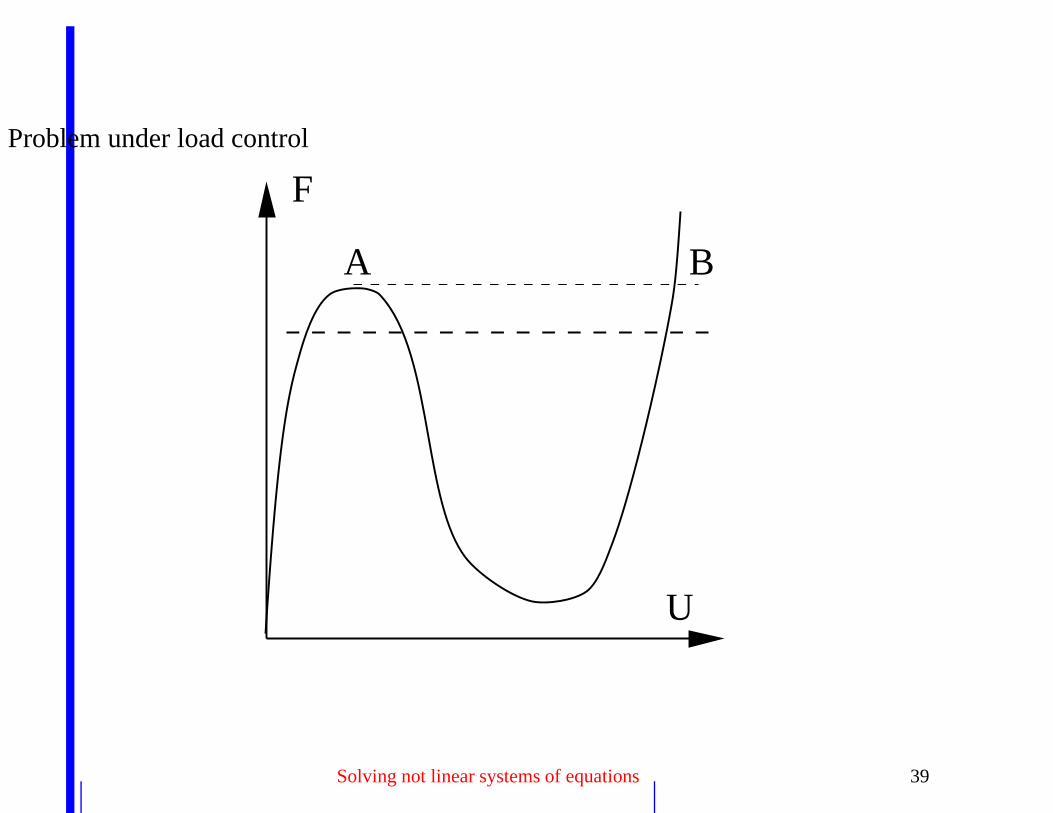
Problem under load control
U
F
A B
Solving not linear systems of equations 39
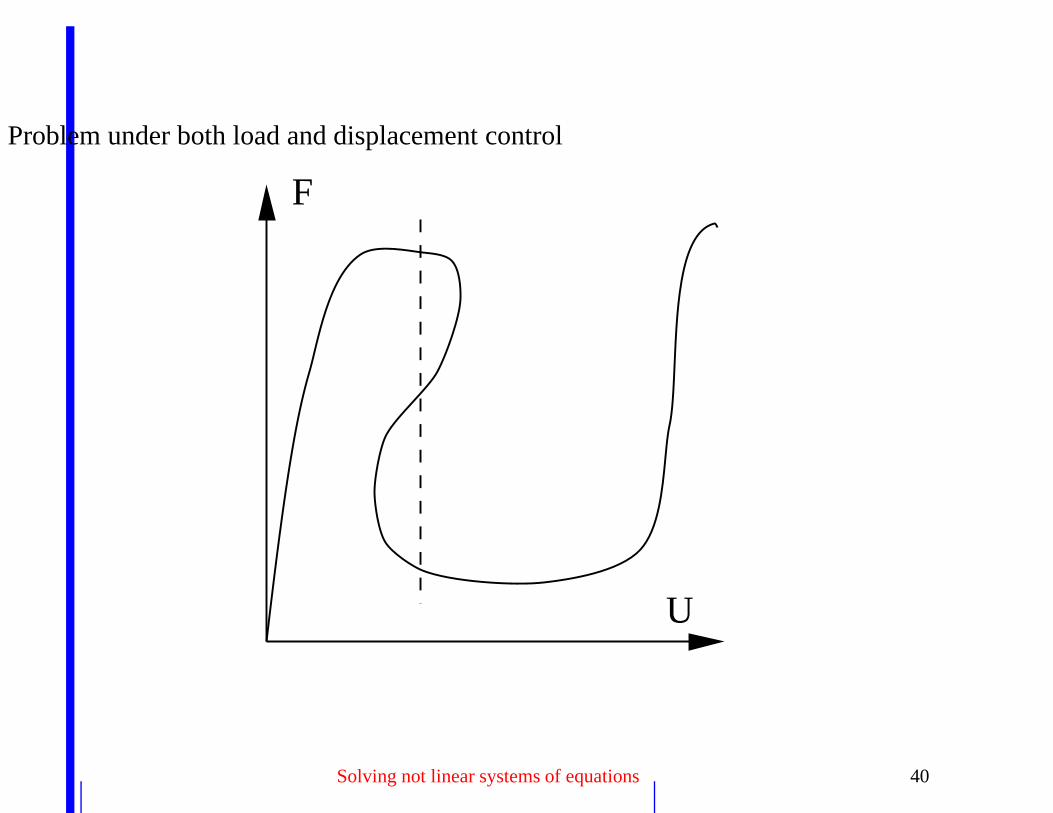
Problem under both load and displacement control
U
F
Solving not linear systems of equations 40
Convergence
The convergence of the iterative resolution can be tested according to different methods:
• As the search solution verifies: R = 0, the iterative process is stopped whenR is small enough:
||R||n < Rε
where Rε is the requested precision. With
||R||n =
(
∑
i
Rni
)1
n
The ”inf.” norm is often used:
||R||∞ = maxi
|Ri|
• In many cases, the equation R = 0 can be written as: Ri − Re = 0where Re is prescribed. A relative error can then be defined:
||Ri − Re||||Re||
< rε
where rε is the requested precision. Note that in some cases (residual stresses during
Solving not linear systems of equations 41
cooling) Re = 0 so that a relative error cannot be defined.
• The search can be stopped when the approximate solution is stable, i.e.∣
∣
∣
∣Uk+1− Uk
∣
∣
∣
∣
n< Uε
This is not a strict convergence criterion For instance the serie: xn = log n verifiesthe criterion (xn+1 − xn = log((n + 1)/n)) ibut does not converge !
Solving not linear systems of equations 42
Incompressibility / Quasi incompressibilitySome materials are incompressible or quasi–incompressible (rubber, metals duringforming, etc. . . ).
The incompressibility condition is written as: La condition d’incompressibilité se traduitpar la condition
div (u) = 0
A FE formulation based on displacement only does not “naturally” enforce thiscondition. An enriched method must be used.
The stress tensor can be separated into a deviatoric component s∼
and an hydrostaticcomponent p so that: que l’on a :
σ∼
= s∼− p1
∼
Incompressibility 43
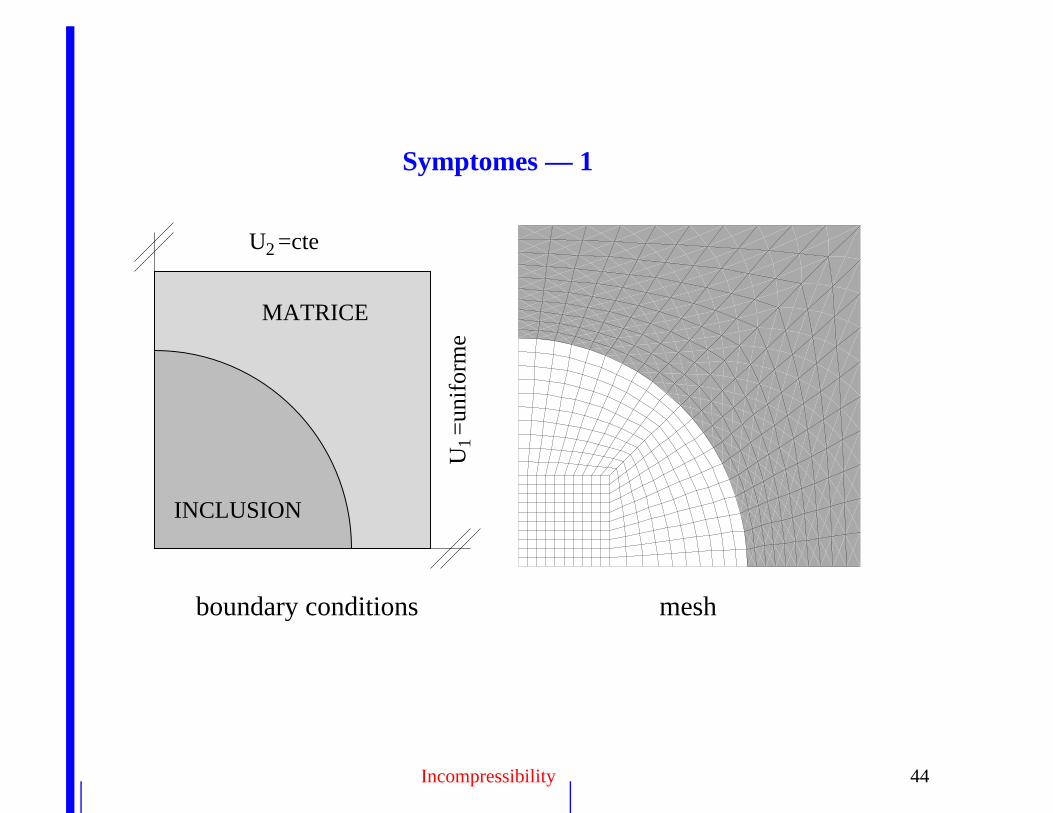
Symptomes — 1
U =
unif
orm
e1
U =cte2
MATRICE
INCLUSION
boundary conditions mesh
Incompressibility 44
Inclusion Young’s modulus 400 GPa, Poisson coeffi-
cient 0.2
Matrix Young’s modulus 70 GPa, Poisson coeffi-
cient 0.3, yield stress 200 MPa
Incompressibility 45
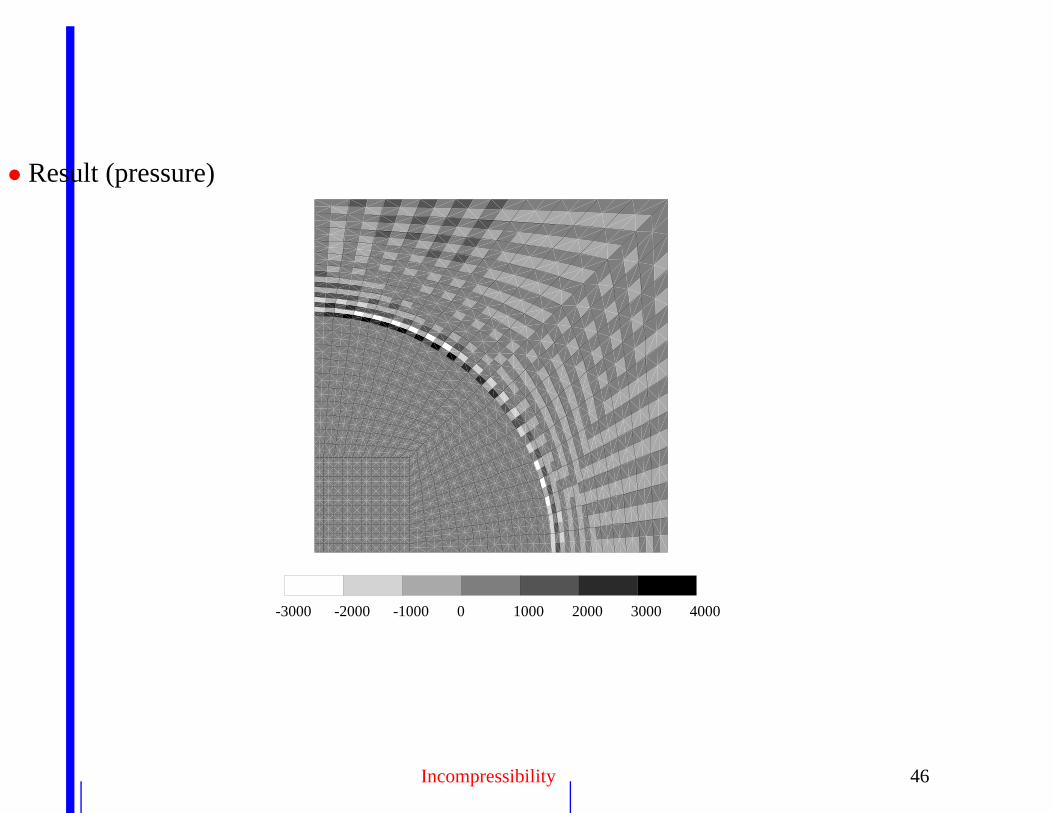
• Result (pressure)
-3000 -2000 -1000 0 1000 2000 3000 4000
Incompressibility 46
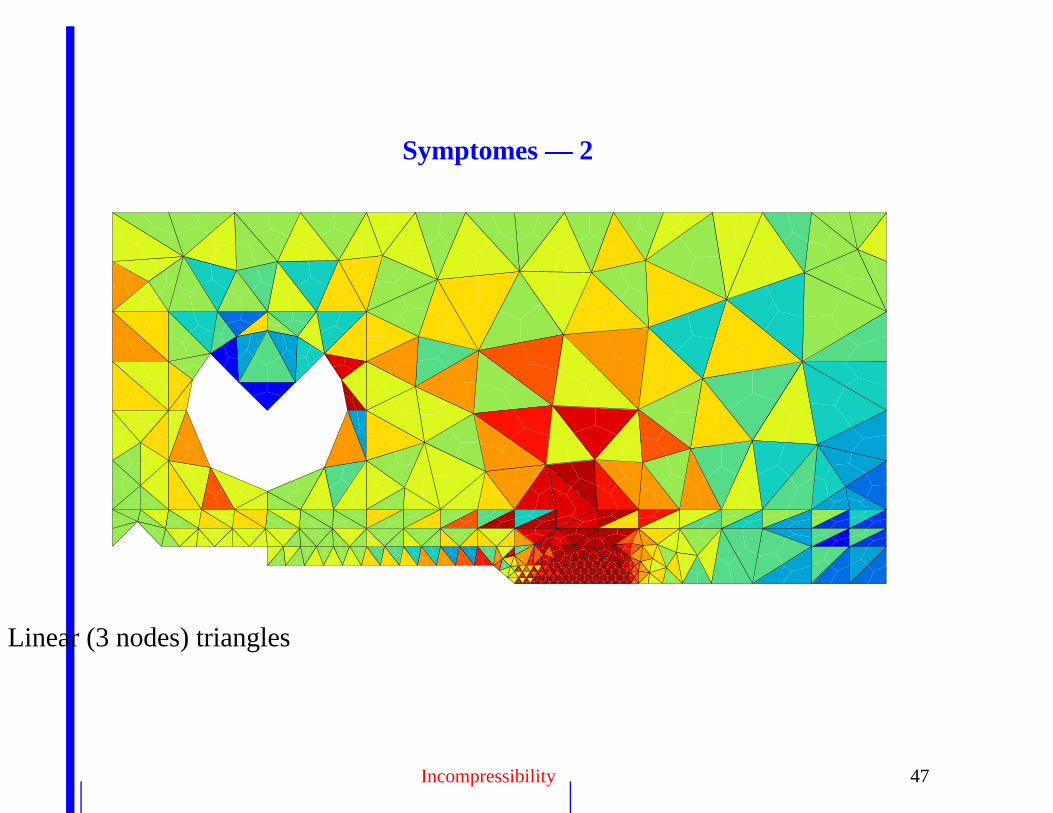
Symptomes — 2
Linear (3 nodes) triangles
Incompressibility 47
Solution 1
• The first solution consists in post-processing the data in order to average the pressurewithin each element:
p =1
V
∫
V
pdV
• A new stress field is build:
σ∼
= s∼− p1
∼→ σ
∼
∗ = s∼− p1
∼
• This solution can be useful but is not general (does not work for T3)
Incompressibility 48
Approximated formulation : selective integration
One uses a selective integration of the volume variation.
• The strain tensor is related to the nodal displacement by
ε∼
= [B] . U
• [B] can be separated into a deviatoric part [Bdev] and a dilatation part [Bdil]:
[B] = [Bdev] + [Bdil]
• [Bdil] is then avaraged over the element:
[
Bdil
]
=1
|Ve|
∫
Ve
[Bdil] dV
• A modified [B] is reconstructed;
[B∗] = [Bdev] +[
Bdil
]
• Deformation is then computed using [B∗]:
ε∼
= [B∗] . U
Incompressibility 49
• The volume variation is therefore constant in the element
• Once again the method cannot be applied to linear triangles and tetrahedrons. It can beapplied to quadraric triangles and tetrahedrons
Incompressibility 50
Approximated Formulation : penalisation
• In that case the material behavior is incompressible; this implies that only s∼
and not σ∼
can be obtained from the material. • pressure is computed for each element
p = −κui,i
• κ : numerical penalisation factor (compressibility)• σ
∼= s
∼− p1
∼
• Ifκ is large enough : divu ≈ 0
• Unknowns: displacements U.
• Internes forces are still given by:∫
Ve
[B]T .σ∼dV
• the elementary stiffness matrix is now given by:
[Ke] =
∫
Ve
(
[B]T
.L∼∼
. [B] + λ([B]T
. [m]T) ⊗ ([m] . [B])
)
dV
• [m] = [1 1 1 0 0 0]
Incompressibility 51
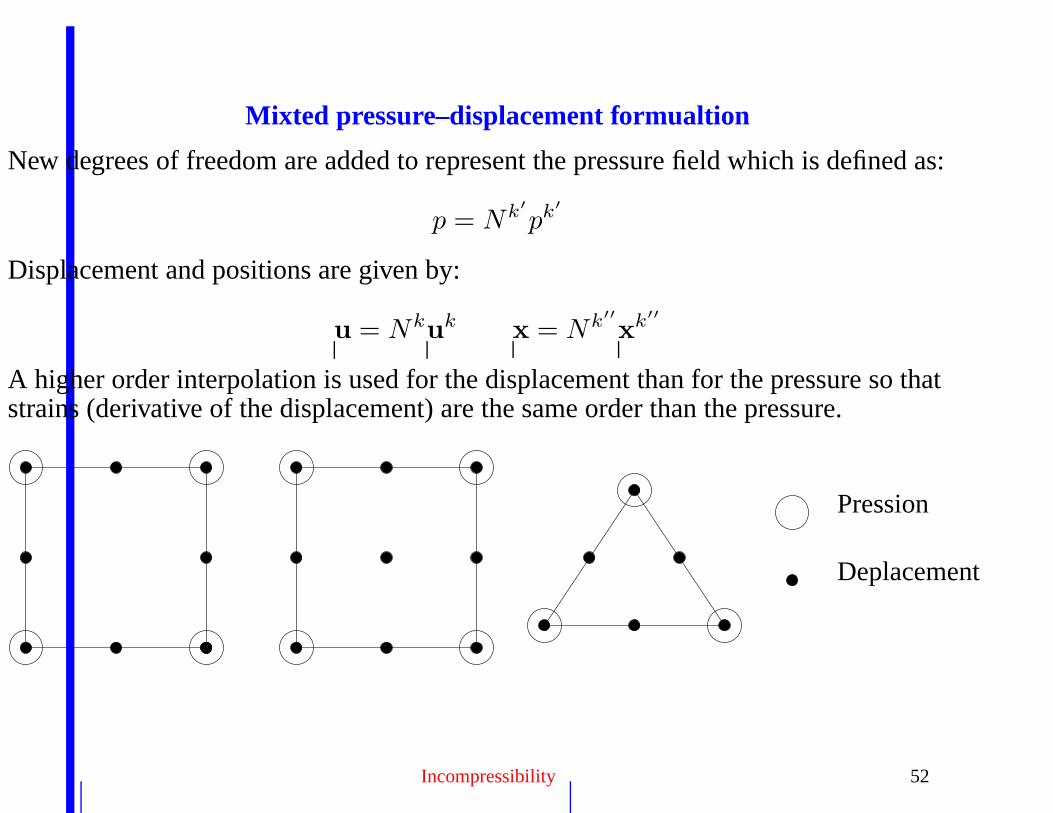
Mixted pressure–displacement formualtion
New degrees of freedom are added to represent the pressure field which is defined as:
p = Nk′
pk′
Displacement and positions are given by:
u = Nku
kx = Nk′′
xk′′
A higher order interpolation is used for the displacement than for the pressure so thatstrains (derivative of the displacement) are the same order than the pressure.
Pression
Deplacement
Incompressibility 52
• For linear element with respect to ~u, the pressure is constant in each element
The mechanical equilibrium and the incompress-
ibility condition must be solved simultaneously
σ∼
= s∼− p1
∼
∆s∼
= L∼∼
: ∆ε∼
material
p = [Hp] p element
∆σ∼
= L∼∼
. [B] . ∆u − ([Hp] . ∆p) [m]T
[m] = [1 1 1 0 0 0]
[Hp] =[
N1 . . . Nnp
]
Incompressibility 53
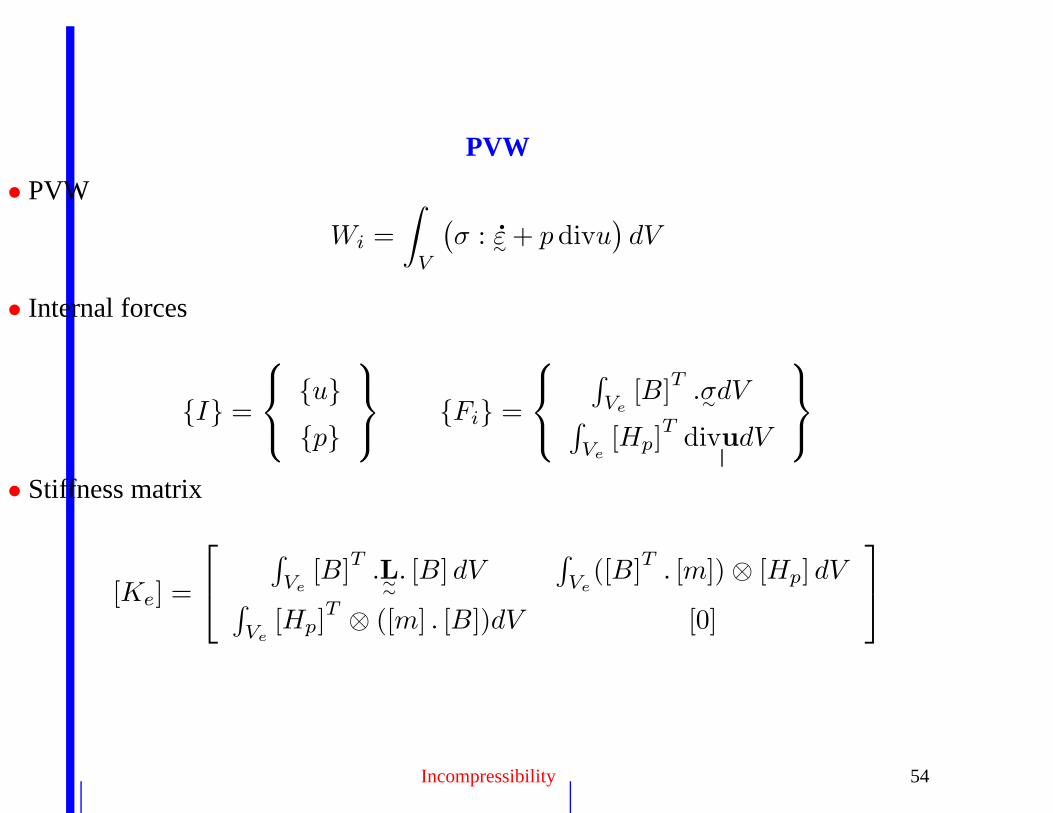
PVW
• PVW
Wi =
∫
V
(
σ : ε∼
+ p divu)
dV
• Internal forces
I =
up
Fi =
∫
Ve[B]T .σ
∼dV
∫
Ve[Hp]
TdivudV
• Stiffness matrix
[Ke] =
∫
Ve[B]
T.L∼∼
. [B] dV∫
Ve([B]
T. [m]) ⊗ [Hp] dV
∫
Ve[Hp]
T ⊗ ([m] . [B])dV [0]
Incompressibility 54