its world congress, stockholm, sweden sensing the visibility range at low cost in the safespot road...
Post on 19-Dec-2015
217 views
TRANSCRIPT
ITS World Congress, Stockholm, Sweden
Sensing the Visibility Range at Low Cost in the SAFESPOT
Road Side Unit
Nicolas Hautière1, Jérémie Bossu1, Erwan Bigorgne1, Nicolas Hiblot2, Adberrahmane Boubezoul1, Benoit Lusetti2,
Didier Aubert2
1. LEPSiS, INRETS/LCPC, Univ. Paris-Est, France2. LIVIC, INRETS/LCPC, France

2ITS World Congress, Stockholm, Sweden
Overview of the system
The proposed system is a data-chain which produces environmental information in the SF Local Dynamic Map based on the detection of meteorological events (rain, fog, black ice, wet road) by one or several sensors of the SAFESPOT Road Side Unit.
It refines these events, or may create a new event, by combining the outputs of the different sensors, in particular CCTV cameras.
By querying the status of vehicle actuators with respect to their past locations, the component is also able to extend or reduce the detection area of this environmental event.
The information is prone to be used in ‘Hazard &Incident Warning’ and ‘Speed Alert’ applications.

3ITS World Congress, Stockholm, Sweden
The SAFESPOT Road Side Unit
SP2 SP3 SP5 SP4
Applications
LDM API
traffic event/accident,weather/road status, vehicle manoeuvres, etc
GPS
R/S sensingsystems
UDP
Data Fusion
Object Refinement
Data Rec.
Situation Refinement
SP2 Framework
LDMServer
TCP/IP
VANET Router
SF vehicles
Legacysystems
SF vehicles Message
Generation
Legacysystems
Gateway
Responsibility
Datasources ROADSIDE UNIT

4ITS World Congress, Stockholm, Sweden
Map fromprovider
Landmarks for referencing
TreeTreeTemporary
regional info!
AccidentAccident
DaytimeFog
DaytimeFog
CongestionCongestion
EgoVehicle
EgoVehicle
Road side unit
Road side unit
VehiclesVehiclesReal time map of vehicle surroundings
with static and dynamic safety information
The Local Dynamic Map

5ITS World Congress, Stockholm, Sweden
Road visibility
Based on the French standard NF-P-99-320
The SF system shall detect visibilities below 400m The SF system should assign the low visibilities to one of the four categories
The system should detect the origin of the visibility reduction: fog, hydrometeors
Visibility range Visibility distance [m]
1 200 to 400
2 100 to 200
3 50 to 100
4 <50
6ITS World Congress, Stockholm, Sweden
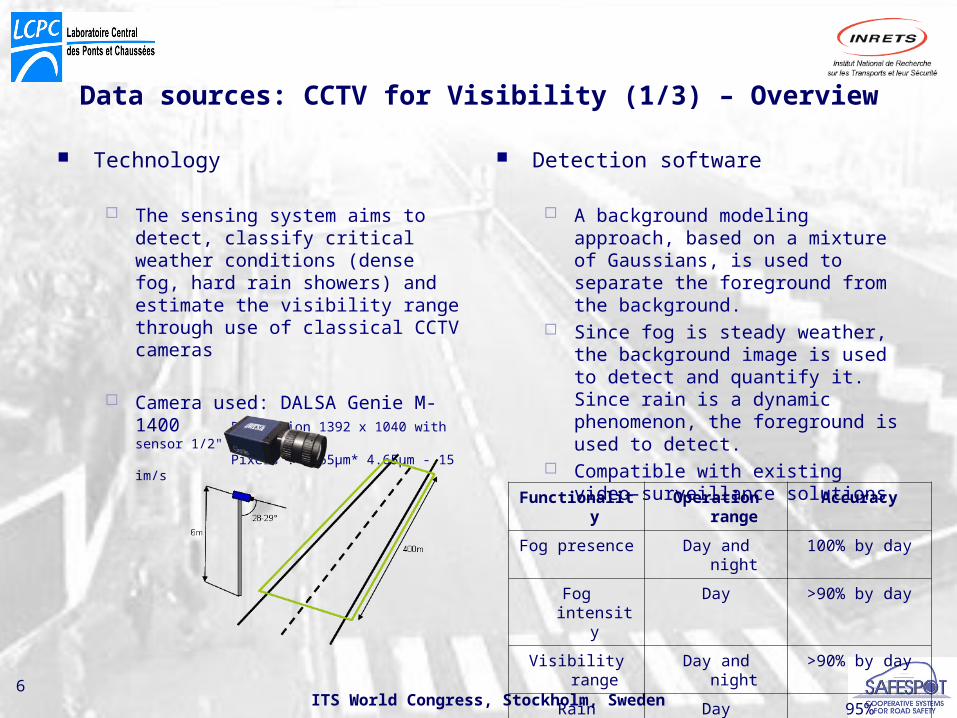
Data sources: CCTV for Visibility (1/3) – Overview
Technology
The sensing system aims to detect, classify critical weather conditions (dense fog, hard rain showers) and estimate the visibility range through use of classical CCTV cameras
Camera used: DALSA Genie M-1400 Resolution 1392 x 1040 with sensor
1/2"Pixels : 4.65µm* 4.65µm - 15 im/s
Detection software
A background modeling approach, based on a mixture of Gaussians, is used to separate the foreground from the background.
Since fog is steady weather, the background image is used to detect and quantify it. Since rain is a dynamic phenomenon, the foreground is used to detect.
Compatible with existing video-surveillance solutions
Functionality Operation range Accuracy
Fog presence Day and night 100% by day
Fog intensity Day >90% by day
Visibility range Day and night >90% by day
Rain presence Day 95%

7ITS World Congress, Stockholm, Sweden
Data sources: CCTV for Visibility (2/3) – Fog detection
Original sequence
Fog detection+
Meteorological visibility
estimationVmet
Driving space area
Mobilized visibility distance
Vmob

8ITS World Congress, Stockholm, Sweden
Data sources: CCTV for Visibility (3/3) – Hydrometeors detection
Original sequence
Detection
Segmentation
Classification

9ITS World Congress, Stockholm, Sweden
Situation refinement of visibility range
Data fusion at RSU level: Fog presence identified by CCTV camera Confirmation by weather station Combination of different sensor outputs to
compute a single visibility range descriptor
At road network level: Visibility range is spatial barycenter of
different sensors outputs The corresponding uncertainty is the sum
of: The uncertainty of the sensors themselves The uncertainty coming from the distance
to the data sources The uncertainty coming from the status of
fog lamps on the road section
Possible other data sources:
Mobile fog sensor
Fog lamps status
Visibility meter

10ITS World Congress, Stockholm, Sweden
Results on LCPC test track
Situation refinement of visibility range
Uncertainty map
Meteorological visility map
SAFESPOT camera in-vehicle camera Fog lights on Fog lights off

11ITS World Congress, Stockholm, Sweden
Conclusion and perspectives
The performances of the detection modules are good, despite a lack of ground truth data. A more systematic evaluation should be carried out.
A general framework to fuse different visibility range related data sources has been proposed.
Fusion with low cost active sensors is planned.
Integration and the test of ‘Hazard & Incident Warning’ and ‘Speed Alert’ applications.
H&IW and SpA applications
CG22 test site

12ITS World Congress, Stockholm, Sweden
Annex 1: Data fusion – At the RSU level
At the RSU level, fog presence is determined by the CCTV camera and may be confirmed or not by the weather station using physical constraints due to fog formation:
Assuming Gaussian variables, Vmet and Vmob are fused to obtain a single descriptor and determine the visibility range V
A simple linear KF is then used to compute a weighted iterative least-squares regression:
1 1
k k
met mobk k
met mobk k
met mob
V V
k
V V
V V
V
1Humidity 90% and Wind 7m.s
1
1 1
met mobk k
kV V
-k 1
1
1 1
ˆ ˆVprediction
ˆ ˆ ˆcorrection
1
k
k k
k k k k
k k k k k
k k k
V
P P Q
K P P
V V K V V
P K P

13ITS World Congress, Stockholm, Sweden
Annex 1: Data fusion – At the road network level (1/2)
At a point of the road network, the visibility range depends on the surrounding data sources
Each data source has its own uncertainty due to its measurement principle, e.g.:
Since fog is local, the uncertainty is also strongly increasing with the distance:
, ,,sourceuncertainty
distance related uncertainty
th
j j js
sj
d dS
21 22
,
1 1, 1 1
d
s
s
dS e u u u
s s
0
2
4
6
8
10
12
0 200 400 600 800
Range [m]
Err
or
[%]
SAFESPOT camera
In-vehicle camera

14ITS World Congress, Stockholm, Sweden
Corresponding uncertainty:
A threshold * is used to filter uncertain data
Annex 1: Data fusion – At the road network level (2/2)
The visibility distance is thus expressed by the spatial barycenter of the different sensors outputs:
0 , ,
1
0 , ,
1
with 1.
pj
jj s jg g
t tp
jj s j
V
dV V
d
1
10 , ,
Fog lamps status
11
with 1.
pg
gt jtj s j
k
dP

15ITS World Congress, Stockholm, Sweden
Annex 2: References
[1] M. Jokela, M. Kutila, J. Laitinen, F. Ahlers, N. Hautière, T. Schendzielorz. “Optical Road Monitoring of the Future Smart Roads – Preliminary Results”, International Journal of Computer and Information Science and Engineering, 1(4):240-245, 2007
[2] N. Hautière, E. Bigorgne and D. Aubert, “Daytime Visibility Range Monitoring through use of a Roadside Camera”, IEEE Intelligent Vehicles Symposium (IV’08), Eindhoven, The Netherlands, June 4-6, 2008.
[3] N. Hautière, E. Bigorgne, J. Bossu and D. Aubert, “Meteorological conditions processing for vision-based traffic monitoring”, IEEE International Workshop on Visual Surveillance (VS2008), in conjunction with ECCV, Marseille, France, October 2008.
[4] N. Hautière, J. Bossu, E. Bigorgne, A. Boubezoul, N. Hiblot, B. Lusetti, D. Aubert. “Sensing the visibility range at low cost in the SAFESPOT Road Side Unit”. Accepted in ITS World Congress (ITS’09), Stockholm, Sweden, September 2009.
[5] N. Hautière, A. Boubezoul, Extensive Monitoring of Visibility Range through Roadside and In-Vehicle Sensors Combination, submitted to IEEE International Conference on Advanced Video and Signal-based Surveillance (AVSS’09), Genoa, Italy, October 2009
[6] J. Bossu, N. Hautière, J.-P. Tarel. Utilisation d’un modèle probabiliste d’orientation de segments pour détecter des hydrométéores dans des séquences vidéo, XXIIème colloque GRETSI (GRETSI’09), Dijon, France, Septembre 2009