integración numérica de sistemas lineales...
TRANSCRIPT
Integración numérica de sistemas lineales perturbados
José Antonio Reyes Perales

UNIVERSIDAD DE ALICANTE Departamento de Matemática Aplicada
Integración numérica de sistemas lineales
perturbados
José Antonio Reyes Perales Alicante - 2003

UNIVERSIDAD DE ALICANTE Departamento de Matemática Aplicada
Integración numérica de sistemas lineales perturbados
Memoria que presenta D. José Antonio Reyes Perales para optar al grado de Doctor en Ciencias (Sección Matemáticas)

A mis padres, que me enseñaron que el fruto del trabajo, es el mejor de los placeres.

El presente trabajo ha sido dirigido por los Doctores: Don José Manuel Ferrándiz Leal, Catedrático, Jefe del Departamento de Matemática Aplicada de la Escuela Politécnica Superior de Alicante y Don Jesús Vigo Aguiar, Profesor Titular de universidad del Departamento de Matemática Pura y Aplicada de la Universidad de Salamanca, a quienes debo agradecer la propuesta del tema así como su constante ayuda durante la elaboración del mismo.
Quiero hacer patente también mi agradecimiento, a todos mis compañeros del Departamento de Matemática Aplicada de la E.P.S.A., por su apoyo y colaboración.
A mi esposa Auxiliadora e hijas, Mª Auxiliadora y Mª
Victoria, por su comprensión y confianza durante estas años.
Finalmente quiero manifestar mi agradecimiento a todas aquellas personas que, con su constante aliento, han hecho posible esta Memoria.
Índice General
Prólogo v
1 Las funciones G de Scheifele 1
1.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 G-funciones para sistemas lineales perturbados . . . . . . . . . . . . . 4
1.3 Desarrollos …nitos y desarrollos en G-funciones . . . . . . . . . . . . . 10
1.3.1 Error de truncación . . . . . . . . . . . . . . . . . . . . . . . . 14
1.4 Métodos de cálculo de las G-funciones . . . . . . . . . . . . . . . . . . 15
1.4.1 Mediante una ecuación diferencial . . . . . . . . . . . . . . . . 15
1.4.2 Mediante desarrollos en serie . . . . . . . . . . . . . . . . . . . 16
1.4.3 Mediante la ley de recurrencia . . . . . . . . . . . . . . . . . . 17
1.4.4 Mediante el procedimiento de eliminacion lineal de Richardson 17
1.5 Notas a los métodos de cálculo de G-funciones . . . . . . . . . . . . . 28
1.6 Las G-funciones de Scheifele como método de integración numérica . . 29
1.6.1 Ejemplo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
1.6.2 Ejemplo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.6.3 Notas a los ejemplos del capítulo . . . . . . . . . . . . . . . . 37
i
ii
1.7 Figuras capítulo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
1.7.1 Ejemplo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
1.7.2 Ejemplo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2 Métodos numéricos multipaso variable para la integración de siste-
mas lineales perturbados 41
2.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.2 Método explícito de p pasos E.I.pE para sistemas lineales perturbados 43
2.2.1 Estableciendo el método multipaso explícito . . . . . . . . . . 48
2.3 Método implícito de p pasos E.I.pI para sistemas lineales perturbados 52
2.3.1 Estableciendo el método multipaso implícito . . . . . . . . . . 55
2.4 Método predictor corrector E.I.pPC para sistemas lineales perturbados 58
3 Implementación de los métodos multipaso variable para la integra-
ción de sistemas lineales perturbados 61
3.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.2 Polinomios Simétricos . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.3 Cálculo recurrente de las matrices A¡tp y B¡tp . . . . . . . . . . . . . . 69
3.3.1 Cálculo recurrente de A¡tp . . . . . . . . . . . . . . . . . . . . . 70
3.3.2 Cálculo recurrente de B¡tp . . . . . . . . . . . . . . . . . . . . . 74
3.4 Rede…nición de los métodos: E.I.pE, E.I.pI y E.I.pPC . . . . . . . . . 77
3.4.1 Método E.I.pE . . . . . . . . . . . . . . . . . . . . . . . . . . 77
3.4.2 Método E.I.pI . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.4.3 Método E.I.pPC . . . . . . . . . . . . . . . . . . . . . . . . . . 82
iii
3.5 Códigos para los métodos: E.I.pE y E.I.pPC . . . . . . . . . . . . . . 82
3.5.1 Código para E.I.pE . . . . . . . . . . . . . . . . . . . . . . . . 82
3.5.2 Código para E.I.pPC . . . . . . . . . . . . . . . . . . . . . . . 83
3.6 Ejemplos numéricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
3.6.1 Problemas sti¤ . . . . . . . . . . . . . . . . . . . . . . . . . . 84
3.6.2 Ejemplo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.6.3 Ejemplo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
3.6.4 Ejemplo 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
3.6.5 Ejemplo 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
3.6.6 Ejemplo 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
3.6.7 Ejemplo 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
3.7 Figuras capítulo 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
3.7.1 Ejemplo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
3.7.2 Ejemplo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
3.7.3 Ejemplo 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
3.7.4 Ejemplo 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
3.7.5 Ejemplo 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
3.7.6 Ejemplo 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Anexo I 117
Anexo II 119
Anexo III 121

iv
Anexo IV 123
Anexo V 125
Anexo VI 131
Bibliografía 138
Prólogo
Muchos problemas físicos adoptan la forma de un sistema lineal perturbado, bien de
forma directa o bien efectuando una transformación adecuada de variables.
Para la resolución de la ecuación no lineal del movimiento newtoniano correspon-
diente al problema de dos cuerpos, se han empleado métodos re…nados de cálculo de
órbitas. En general se sustituye la ecuación de Newton por unas nuevas ecuaciones
mejor acondicionadas para la integración numérica, como los metodos introducidos
por Encke [71], las variables universales de Battin [2] o las transformaciones que re-
gularizan las ecuaciones del movimiento entre las que destacan las KS [82] y las BF
[22],[23].
En mecánica celeste, las transformaciones que permiten escribir las ecuaciones
del movimiento mediante ecuaciones diferenciales lineales se denominan linealizacio-
nes. No hay que confundir esta terminología con la que signi…ca desarrollar en serie
de Taylor y conserva sólo la parte lineal, pues las transformaciones anteriores, son
exactas, y reducen las ecuaciones del movimiento a osciladores armónicos. Suelen
conseguirse efectuando un cambio de variable independiente, que produce una regu-
larización analítica del tamaño del paso de integración, asociada o no con cambios de
v

vi
variables dependientes. Con el …n de regularizar el movimiento de una partícula se
pueden ensayar distintos métodos: como transformaciones clásicas válidas cuando el
movimiento se realiza en el plano, encontramos la dada en 1895 por Thiele, la de Bir-
kho¤ en 1915 o la de Levi-Civita en 1906, esta última permite una linealización, una
integración más fácil y una teoría de perturbaciones sencilla. Todas ellas se aplicaron
al problema de tres cuerpos.[83].
La linealización más extendida es la KS de Kunstaanheimo - Stiefel, introducida
en 1964, que generaliza a espacios de dimensión tres la transformación de Levi - Ci-
vita, permitiendo la reducción de las ecuaciones del movimiento a cuatro osciladores
armónicos perturbados, al tomar como variable independiente la anomalía excéntri-
ca. Cuando se emplea la anomalía verdadera como variable independiente, obtenemos
otra linealización importante, la BF, de Burdet - Ferrándiz, que compitiendo venta-
josamente con los reputados métodos KS, es especialmente valiosa en la integración
numérica de órbitas altamente excéntricas; sin embargo, la integración de la ecuación
del tiempo asociado a la anomalía verdadera produce grandes errores en la determi-
nación del tiempo físico, por lo que éste debe calcularse por un método alternativo
[27],[30],[31],[32].
Para predecir la órbita de un satélite arti…cial, es necesario elaborar un determina-
do modelo que la describa, pudiéndose encontrar serios inconvenientes en predicciones
a largo plazo, o, en el caso de órbitas muy excéntricas, dado que la velocidad del sa-
télite en el perigeo es grande y esta circunstancia, unida a la fuerte curvatura de la
trayectoria, puede provocar pérdida de precisión en la integración numérica aunque
se utilicen modelos sencillos [86]. Para mejorar la precisión en el cálculo de órbitas

vii
existen diversas vías, que a veces resultan complementarias una de las más modernas
y e…cientes se obtiene en dos pasos: el primero consiste, como ya se ha señalado,
en la elección de ecuaciones bien planeadas para la integración numérica, el segundo
en la implementación de métodos numéricos no standar adaptados a la ecuación del
movimiento.
Los orígenes de estas últimas técnicas pueden situarse en los trabajos de Gautschi
de 1961 [39], que desarrollan la teoría básica y algoritmos capaces de integrar sin
error de truncación osciladores con una frecuencia. El desarrollo de los métodos
clásicos en diferencias …nitas para la integración numérica y las técnicas para su
aplicación, se presentan en la bibliografía sobre métodos numéricos de ecuaciones
diferenciales [43],[44],[50],[64]. Un primer método es dado por Cowell [82]. En 1969
Stiefel y Bettis introdujeron cambios en el método de Cowell de orden superior a
dos para lograr la integración exacta de las funciones circulares seno y coseno con
una misma frecuencia. En 1970 Bettis [3] propuso modi…caciones a los métodos
clásicos de diferencias de Adams - Moulton y Adams - Bashforth para ecuaciones de
primer orden, y de Störmer y Cowell en el caso de ecuaciones de orden dos, dando de
ellos una formulación uni…cada, pero no explícita, de los coe…cientes de los métodos
anteriormente mencionados. La formulación era de paso constante y válida para orden
arbitrario.
Siguiendo la línea abierta por Gautschi se encuentran trabajos como los de Neta
y Ford en 1984 [63], en los que se da una familia de métodos para integrar ecuaciones
diferenciales ordinarias de primer y segundo orden, estos métodos pueden ser re…nados
con un conocimiento, a priori, del usuario, en la localización de frecuencias que son

viii
dominantes en la solución exacta; con esta información el error de truncación queda
considerablemente reducido en magnitud, por lo que estos métodos suponen una
modi…cación de los métodos de Milne - Simpson; o en una vía diferente los de Scheifele
que en 1971 [74], obtuvo un re…namiento del método de Taylor basado en sus funciones
Gk, que se utilizan para de…nir series que permiten construir un método de integración
numérica, con la propiedad de que si los términos de perturbación son eliminados,
entonces el método numérico integra exactamente el correspondiente problema no
perturbado; los de Van Dooren en 1984 [84], Cash en 1981 [5], Franco, Correas y
Petriz, en 1991 haciendo especial hincapié en la construcción de esquemas del tipo
de Störmer - Cowell [37] y Vigo en 1993 [86],[88],[90]. Los algoritmos citados se
caracterizan por la dependencia de sus coe…cientes respecto del producto del paso
por la frecuencia. La extensión de parte de la teoría clásica de métodos multipaso
lineales [44] al caso de coe…cientes dependientes del paso puede verse en Lyche en 1972
[53], donde además encontramos un lema que nos permite obtener métodos adaptados
a exponenciales complejas o reales. Algunos métodos que permiten integrar productos
de polinomios ordinarios y exponenciales reales sin error de truncamiento, basados en
este lema, pueden verse en Raptis o Simos [72], [73], entre otros.
Recientemente se han utilizado métodos que emplean productos matriz - vector
con la exponencial o una función relacionada con el jacobiano para la integración
numérica de sistemas altamente sti¤ de ecuaciones diferenciales [47]. Estos proble-
mas pueden ser aproximados por los métodos de subespacios de Krylov [7],[47], que
convergen mas rápidamente que las soluciones propuestas por métodos standar de
integración de problemas sti¤. Estos métodos exponenciales presentan propiedades

ix
favorables para la integración de ecuaciones diferenciales cuyo jacobiano tiene auto-
valores imaginarios grandes. Se utilizan en experimentos con problemas de reacción
- difusión y en la ecuación de Schrödinger dependiente del tiempo.
En lo que sigue nos proponemos desarrollar métodos numéricos para la resolución
de problemas perturbados del tipo: x00= Ax + "f (x; t) con x(0) = x0, llamados
sistemas lineales perturbados. El pequeño parámetro " indica que los términos de
la perturbación son pequeños con respecto al resto de los términos. Construiremos
métodos en los que si los términos de perturbación son eliminados, el método numérico
integra exactamente el correspondiente sistema homogéneo. Para ello, nos basamos en
el método de las G-funciones de Scheifele que poseen esa propiedad, y construiremos
a partir de él, métodos multipaso con esta propiedad, de implementación más sencilla
que el de Scheifele, cuando el problema sea perturbado estos métodos darán lugar a
expresiones del error que tienen al parámetro " como factor.
El trabajo desarrollado en esta memoria se ha dividido en tres capítulos.
En el Capítulo 1, se describe el método original de Scheifele y sus propiedades,
completándose la exposición con ejemplos numéricos comparados con el método LSO-
DE, efectuando sobre estos problemas los acondicionamientos necesarios para su inte-
gración. Como idea nueva, se exponen diversos procedimientos para el cálculo de las
G-funciones de Scheifele, destacando los basados en la extrapolación de Richardson.
La construcción de un método multipaso de paso variable para la integración de
sistemas lineales perturbados, se realiza en el Capítulo 2, basándose en el método de
Scheifele, y presentando ventajas, frente a otros que también se fundamentan en el
método de Scheifele, como el SMF [56], [57]. Entre estas ventajas se puede citar que

x
el cálculo de sus coe…cientes es fácilmente computable, al aproximar las derivadas que
aparecen en las fórmulas que de…nen el método, por diferencias divididas y la de ser
un método de paso variable.
Se tratan en el Capítulo 3, los métodos EIpE ( Integrador Exponencial de p pasos
Explícito ), EIpI ( Integrador Exponencial de p pasos Implícito ) y EIpPE ( Inte-
grador Exponencial de p pasos Predictor-Corrector ), descritos anteriormente pero
con sus coe…cientes matriciales expresados en forma recurrente, lo que facilita su im-
plementación en un computador y supone una ventaja frente a otros métodos; se
exponen, a continuación, los códigos de estos algoritmos implementados en MAPLE
V. La memoria se completa con varios ejemplos numéricos en los que se utilizan los
nuevos algoritmos y se comparan con códigos bien conocidos como LSODE, GEAR
y MGEAR. En estos últimos se emplean las implementaciones de Maple V para ase-
gurar que los resultados no quedan distorsionados por una mala programación que
favorezca a nuestros códigos.
El bene…cio producido por el uso de los nuevos algoritmos resulta patente en los
ejemplos, cuando se aplican a los problemas para los que han sido diseñados.

Capítulo 1
Las funciones G de Scheifele
1.1 Introducción
En este capítulo se va a desarrollar un método numérico adaptado a la solución de
problemas de perturbación del tipo:
x0= Ax + "f (x; t ) ; x(0) = x0;
donde A es una matriz regular de orden n, " es un pequeño parámetro de perturbación
y el vector x tiene por componentes a las funciones xi(t) con i = 1 : : : n. El campo
vectorial de perturbación f (x; t ) tiene de componentes fi(x; t ) con i = 1 : : : n y es
continuo, con derivadas continuas hasta un cierto orden que satisfaga las condiciones
de existencia y unicidad de las soluciones. A este tipo de sistema se le llama sistema
lineal perturbado.
El procedimiento más básico para la integración numérica de sistemas lineales
perturbados mediante métodos de un paso es aproximar la solución mediante un
1
2
desarrollo de Taylor ,[94],[43]. Este desarrollo se trunca y los coe…cientes del polinomio
resultante se evalúan en cada paso de integración.
Los métodos de tipo Runge-Kutta [18],[50],[56],[62],[64] tienen la gran ventaja
de no necesitar información acerca de las derivadas de la función de perturbación,
la desventaja de que adolecen es la di…cultad, o más bien, el trabajo que requiere
la construcción de un método de Runge-Kutta de orden mayor que cuatro y el gran
número de evaluaciones que precisa su implementación con el consiguiente incremento
de coste computacional.
Otra forma de evitar el cálculo de las derivadas de la función de perturbación
es representar sus campos componentes fi(x; t) con i = 1 : : : n mediante expresiones
sencillas con fórmulas de recurrencia para los coe…cientes aij de los desarrollos en
series de potencias del tipo:
xi(t) = ai0 + ai1t + ai2t2 + :::
donde xi son las componentes de la solución x del sistema. La técnica para establecer
estas fórmulas de recurrencia fue desarrollada por Ste¤ensen [77],[78],[79]. La des-
ventaja de este método directo de series de potencias es el tiempo de computación
de estas recurrencias, que puede ser alto si f (x; t) posee una dependencia funcional
complicada.
Es deseable que los métodos numéricos que se utilicen en la resolución de sistemas
lineales perturbados veri…quen la siguiente propiedad, [82]: si los términos de pertur-
bación desaparecen en un instante arbitrario de la variable independiente t (o de s),
entonces el método numérico debería integrar sin error de discretización el sistema no
3
perturbado.
Un ejemplo clásico de la física se presenta en la ecuación de Newton:
::x +
k2
r3x = P con k2 = G(M +m)
así como en las ecuaciones regularizadas:
u00+h
2u = ¡
1
4
@
@u
¡kuk2 V
¢+
kuk2
2
¡LtP
¢
que se expresan, en términos de sus componentes:
u00
j +h
2uj = ¡
1
4
@
@uj
¡kuk2 V
¢+
kuk2
2
¡LtP
¢j
j = 1; 2; 3; 4:
h0= ¡ kuk2
@V
@t¡ 2
³u0; LtP
´con t
0= kuk2
obteniéndose un sistema lineal perturbado con tal que los términos que contengan
a V y a P sean considerados como términos de perturbación, [82]. Las ecuaciones
newtonianas se integran a menudo por las fórmulas clásicas de Runge-Kutta o por
métodos de diferencias …nitas, pero estos procedimientos no veri…can la propiedad
anteriormente expuesta. Esta condición tampoco la satisface el método de Encke,
[86], que se caracteriza por el cálculo de la desviación de las coordenadas perturbadas
con respecto a un movimiento osculatriz adoptado inicialmente.
En este capítulo, presentamos el método de integración numérica descrito por
Scheifele,[88],[56],[57],[74],[82], para integrar sistemas lineales perturbados, ilustrán-
dolo con ejemplos numéricos y comparándolo con otros métodos. El método de Sche-
feile está basado en un re…namiento de las series de potencias de Taylor, y consiste
en de…nir una sucesión de funciones Gj que sirven como base para construir la so-
lución como combinación lineal de ellas, calculándose sus coe…cientes por fórmulas

4
de recurrencia. Dicha solución se utilizará para construir un método de integración
numérica.
El método de las G - funciones de Scheifele presenta la ventaja de veri…car, no sólo
la propiedad anteriormente expresada, sino que además integra, con sólo el primer
término, el problema homogéneo.
1.2 G-funciones para sistemas lineales perturbados
Para desarrollar la idea básica de este capítulo, consideremos el PVI anterior. Supon-
gamos que la función de perturbación g(t) = f (x; t) admite un desarrollo en serie de
la forma:
f (x; t) =1X
k=0
tk
k!ck+1
con lo que el problema de valores iniciales se puede escribir como:
x0
= Ax + "1X
k=0
tk
k!ck+1 ; x(0) = x0;
La solución del PVI, expresado de esta última forma, puede obtenerse del modo
usual, construyendo la solución general del sistema homogéneo con la condición inicial
dada y añadiendo una solución del problema completo con la condición inicial nula.
La solución del problema completo con la condición inicial nula se puede obtener
resolviendo los siguientes PVI individuales:
¡xkj
¢0= A xkj + e
k tj
j!
xkj (0) = 0
j = 0; 1; 2; ::: k = 1; 2; :::; n

5
donde:
xkj 2 M(n; 1;R)
ek = (0; :::;k)
1; :::; 0)t
y combinándolos de forma adecuada con los coe…cientes " y ck.
Con el …n de simpli…car la notación introducimos las matrices cuadradas de orden
n cuyas columnas son las matrices xkj , es decir:
Xj =¡x1j ; x
2j ; : : : ; x
nj
¢con j = 0; 1; 2; :::
evidentemente, estas matrices son soluciones del siguiente PVI:
X0
j = AXj +tj
j !I ; Xj(0) = 0 ; j = 0; 1; :::
dondeXj es una función real con valores en el anillo M(n,R) de las matrices cuadradas
de orden n, siendo I y 0 , respectivamente, los elementos unidad y neutro de este anillo.
De…nition 1 Las soluciones de estos problemas son las G-funciones de Scheifele [74]
y se denotarán como:
Gj+1 (t) = Xj (t) ; j = 0; 1; :::
Aunque la notación no lo indica explícitamente, estas funciones dependen de A.
Proposition 2 Las G-funciones de Scheifele cumplen:
G0
j (t) = Gj¡1 (t) j = 2; 3; :::
D/.

6
Bastará probar que veri…can el mismo P V I. En efecto, Gj (t) satisface la ecuación
siguiente:
G0
j (t) = AGj (t) +tj¡1
(j ¡ 1)!I ; Gj (0) = 0 ; j = 2; 3; :::
y derivando la expresión anterior se obtiene:
(G0
j (t))0= AG
0
j (t) +tj¡2
(j ¡ 2)!I = Gj¡1 (t) j = 2; 3; :::
es decir: G0
j (t) es solución de la ecuación:
X0
j¡2 (t) = AXj¡2 (t) +tj¡2
(j ¡ 2)!I ; Xj¡2 (0) = 0 ; j = 2; 3; :::
y además:
G0
j (0) = AGj (0) + 0 = A0 = 0 desde j = 2; 3; :::Ä
De…nition 3 Completando la ley de diferenciación dada en (proposición no 2), de-
…nimos:
G0 (t) = G0
1 (t)
Por tanto:
Corollary 4 Las G-funciones de Scheifele, veri…can la siguiente relación de recu-
rrencia:
Gj (t) = AGj+1 (t) +tj
j!I ; j = 0; 1; :::
Corollary 5 La función G0 es solución del siguiente PVI:
x0= Ax ; x(0) = I

7
Veamos que la función G0; se puede expresar mediante un desarrollo en serie.
Desarrollando analíticamente la función G0;tenemos:
G0 (t) =1X
k=0
tk
k!Hk; donde Hk 2 M(n;R)
derivando la expresión anterior resulta:
G0
0 (t) =1X
k=1
tk¡1
(k ¡ 1)!Hk =
1X
k=0
tk
k!Hk+1:
Por (corolario no 5) :
1X
k=0
tk
k!Hk+1 = A
1X
k=0
tk
k!Hk =
1X
k=0
tk
k!AHk;
identi…cando, obtenemos que:
Hk+1 = AHk ; k = 0; 1; :::
y de aquí:
Hk = AkH0 ; k = 0; 1; :::
Del (corolario no 5) y de evaluar G0 (t) en t = 0; se deduce que:
H0 = I
Hk = Ak ; k = 1; :::
Luego:
G0 (t) =1X
k=0
tk
k!Ak = etA
Proposition 6 Las G-funciones de Scheifele se pueden expresar mediante desarrollos
en serie:
Gj (t) =1X
k=0
tk+j
(k + j )!Hk; Hk 2 M(n;R)

8
D/.
Evidentemente se veri…ca para j = 0; supongamos cierto que:
Gi (t) =1X
k=0
tk+i
(k + i)!Hk
como:
Gi+1 (t) =
Z
Gi (t) dt =1X
k=0
tk+i+1
(k + i + 1)!Hk
queda demostrado por aplicación del método de inducción completa.Ä
Los desarrollos anteriores nos llevan a las siguientes fórmulas explícitas para las
G-funciones:
G0(t) = eAt
G1(t) = A¡1¡eAt ¡ I
¢
G2(t) = A¡2¡eAt ¡ I
¢¡ tA¡1
G3(t) = A¡3¡eAt ¡ I
¢¡ tA¡2 ¡
t2
2!A¡1
...
Proposition 7 Una solución del problema:
x0
= Ax + "1X
k=0
tk
k!ck+1 ; x(0) = 0
es
xp = "1X
k=1
Gk(t)ck
D/. Como:
x0
p = "1X
k=1
G0
k(t)ck = "1X
k=1
Gk¡1(t)ck = "1X
k=0
Gk(t)ck+1

9
y además:
Axp + "1X
k=0
tk
k!ck+1 = A
Ã
"1X
k=1
Gk(t)ck
!
x + "1X
k=0
tk
k!ck+1 =
= "1X
k=0
µ
AGk+1(t) +tk
k!I
¶
ck+1 =
= "1X
k=0
Gk(t) ck+1
con
xp(0) = "1X
k=1
Gk(0)ck = 0
se veri…ca la proposición. Ä
Theorem 8 La solución del PVI:
x0
= Ax + "f (x; t ) ; x(0) = x0
adopta la forma:
x(t) = G0(t)x0 + "1X
k=1
Gk(t)ck
D/.Como :
x0¡ Ax = (G
0
0 (t) ¡ AG0 (t))x0 + "1X
k=1
(G0
k (t) ¡AGk(t))ck
de, (de…nición no3) y de (corolario no 4 y 5) se deduce que:
x0¡ Ax = 0x0 + "
1X
k=1
(Gk¡1 (t)¡ AGk(t))ck = "1X
k=1
tk¡1
(k ¡ 1)!ck
por consiguiente:
x0
¡ Ax ="1X
k=0
tk
k!ck+1
Además:
x(0) =G0(0)x0+ "1X
k=1
Gk(0)ck = Ix0 +0 = Ix0 = x0:Ä
10
1.3 Desarrollos …nitos y desarrollos en G-funciones
Desarrollando en serie de Taylor y truncando una solución x(t) del PVI:
x0= Ax + "f (x; t) ; x(0) = x0
obtenemos una aproximación de la solución, de la forma:
xm(t) =mX
k=0
tk
k!ak con ak = x
k)(0) 2 Rn
Al sustituir en la expresión anterior la relación de recurrencia (corolario no 4) y
teniendo en cuenta que las matrices Gk (t) y A conmutan., obtenemos:
xm(t) =mX
k=0
(Gk (t)¡ AGk+1 (t))ak =
= G0(t)a0+m¡1X
k=0
Gk+1 (t) (ak+1 ¡ Aak) ¡ Gm+1(t)Aam
De…niendo una nueva sucesión de coe…cientes, como:
b0 = a0; bk+1 = ak+1 ¡ Aak;
el desarrollo anterior se reduce a:
xm(t) =mX
k=0
Gk (t)bk ¡ Gm+1 (t)Aam
eliminando el último término, obtenemos una aproximación diferente:
Xm(t) =mX
k=0
Gk (t)bk
que proporciona mayor precisión que xm(t) =mP
k=0
tk
k! ak, como vamos a ver.
Para demostrar esto, nos restringimos al caso especial en el que f depende so-
lamente de t, pero citaremos después algunos resultados correspondientes al caso
general. En este caso especial:

11
f (t) =1X
k=0
tk
k!f k)(0)
Los coe…cientes de xm(t) =mP
k=0
tk
k!ak y Xm(t) =
mP
k=0
Gk (t)bk para el PVI:
x0(t) = Ax(t) + "f (t) ; x(0) = x0
vendrán dados por:
a0 = x0; ak+1 = Aak + "fk)(0)
b0 = x0; bk+1 = "fk)(0) = "ck+1
ya que, si:
x(t) =1X
k=0
tk
k!ak
es la solución del PVI, tenemos :
x(0) = x0 = a0:
Sustituyendo
x0
(t) =1X
k=0
tk
k!ak+1; x(t) =
1X
k=0
tk
k!ak y f (t ) =
1X
k=0
tk
k!f k)(0)
en el PVI resulta:
1X
k=0
tk
k!ak+1 = A
1X
k=0
tk
k!ak + "
1X
k=0
tk
k!f k)(0)
e identi…cando coe…cientes, obtenemos la relación:
ak+1 = Aak + "fk)(0)

12
Trivialmente:
b0 = x0
y
bk+1 = ak+1 ¡ Aak = Aak + "fk)(0) ¡ Aak = "f
k)(0) = "ck+1
entonces:
Xm(t) = G0 (t) x0 + "mX
k=1
Gk (t) fk¡1)(0)
Insertando esto, en el sistema lineal perturbado, obtenemos el residuo:
Rm(t) = "f (t)¡ (X0
m(t) ¡ AXm(t)) =
= "1X
k=0
tk
k!f k)(0) ¡ (
mX
k=0
G0
k (t)bk ¡ AmX
k=0
Gk (t)bk) =
= "1X
k=0
tk
k!f k)(0)¡
mX
k=1
(G0
k (t)bk ¡ AGk (t))bk =
= "1X
k=0
tk
k!f k)(0)¡
mX
k=1
tk¡1
(k ¡ 1)!bk =
= "
Ã1X
k=0
tk
k!f k)(0)¡
m¡1X
k=0
tk
k!f k)(0)
!
=
= "1X
k=m
tk
k!f k)(0)
Por otro lado, teniendo en cuenta que:
x0
m(t)¡ Axm(t) =m¡1X
k=0
(Gk (t) ¡ AGk+1 (t))(ak+1 ¡ Aak) ¡ (Gm (t)¡ AGm+1 (t))Aam
y (corolario no 4), el residuo correspondiente a xm(t) viene dado por:
rm(t) = "f (t)¡ (x0
m(t) ¡ Axm(t)) =
= "1X
k=0
tk
k!f k)(0) ¡
Ãm¡1X
k=0
tk
k!(ak+1 ¡ Aak) ¡
tm
m!Aam
!
=

13
= "1X
k=0
tk
k!f k)(0) ¡ "
m¡1X
k=0
tk
k!f k)(0) +
tm
m!Aam =
= "1X
k=m
tk
k!f k)(0) +
tm
m!Aam
De las expresiones de rm(t) y Rm(t) se obtienen importantes conclusiones. En
Rm(t) el parámetro de perturbación " es factor del residuo, por tanto Rm(t) es pe-
queño con ". En cambio, el residuo rm(t) no contiene este factor y en general no
es pequeño con ". Si " = 0 el método de series de potencias produce un error de
truncación y sin embargo el método de las G-funciones de Scheifele, [56],[74] con sólo
el primer término, integra exactamente el sistema de ecuaciones diferenciales.
Volviendo al caso general:
x0
= Ax + "f (x; t) ; x(0) = x0
bajo las hipótesis:
² La solución x(t) es holomór…ca en [¡T; T ] con T > 0
² Todas las derivadas parciales de f (x; t ) incluída la m-ésima son continuas en
un dominio cerrado, del espacio de las variables (x; t), que contiene a todos los
valores de la solución exacta x(t), ademas de las aproximaciones consideradas
xm(t) y Xm(t) en [¡T ; T ].
Entonces los residuos:
Rm(t) = "f (Xm(t); t)¡ (X0
m(t) ¡ AXm(t))
y
rm(t) = "f (xm(t); t)¡ (x0
m(t) ¡ Axm(t))

14
correspondientes, respectivamente, al método de las G-funciones y al método de des-
arrollos de Taylor satisfacen para t ! 0 las leyes asintóticas:
Rm(t) » " fm)(0)tm
m!
rm(t) »¡" fm)(0) + Aam
¢ tm
m!
es decir:
limt!0
Rm(t)
tm= "
fm)(0)
m!
limt!0
rm(t)
tm=
"fm)(0) + Aam
m!
Es importante notar [74] que esto es irrelevante si la derivada en las expresiones
anteriores se calcula mediante la inserción en f de la solución exacta x(t) o de una
de las soluciones aproximadas xm(t) y Xm(t):
1.3.1 Error de truncación
Desarrollando en serie de potencias la solución exacta del PVI:
x(t) =1X
k=0
tk
k!ak
y dado que:
ak+1 = Aak + "fk)(0)
se tiene:
x(t) =1X
k=0
tk
k!
¡Aak¡1 + "f
k¡1)(0)¢

15
El error de truncación para:
xm(t) =mX
k=0
tk
k!ak
es:
em = x(t)¡ xm(t) =1X
k=m+1
tk
k!ak =
tm+1
(m +1)!
¡Aam + "f
m)(0)¢+O(tm+1)
Por otra parte, expresando la solución del PVI, en términos de G-funciones:
x(t) = G0(t)x0 + "1X
k=1
Gk(t)ck
el error de truncación para:
Xm(t) =mX
k=0
Gk (t)bk
es:
Em = x(t) ¡Xm(t) = "1X
k=m+1
Gk (t) fk¡1)(0)
Si " = 0 el método de series de potencias produce un error de truncación y sin
embargo el método de las G-funciones de Scheifele, no genera error de truncación.
1.4 Métodos de cálculo de las G-funciones
1.4.1 Mediante una ecuación diferencial
El cálculo de las G-funciones de Scheifele para j¸1, se puede realizar resolviendo
numéricamente el siguiente sistema de ecuaciones diferenciales:
G0
j (t) = AGj (t) +tj¡1
(j ¡ 1)!I ; Gj (0) = 0 ; j = 1; 2; :::

16
Notamos Gj (t) = (gji;k) con j =1, 2, ... y A = (ai;k). Si sustituímos en la fórmula
anterior resulta:
(gji;k)0
= A(gji;k) +tj¡1
(j ¡ 1)!I ; (gji;k(0)) = 0
y de ahí:
gji;k0=
nX
l=1
ai;lgjl;k +
tj¡1
(j ¡ 1)!±i;k ; i; k = 1; 2; :::; n ; j = 1; 2; :::
Para cada j = 1, 2, ... obtenemos un sistema de ecuaciones diferenciales que se
puede resolver por metodos numéricos, tales como: rkf45, deverk78, gear, mgear,
lsode, etc [1],[6],[36],[40],[43],[64],[66]. Quedaría pendiente sólo el cálculo de G0 (t).
1.4.2 Mediante desarrollos en serie
Teniendo en cuenta que:
Gj (t) =1X
k=0
tk+j
(k + j)!Ak; donde A 2 M(n;R) ; j = 0; 1; :::
podemos escribir:
Gj (t) =1X
k=0
tk+j
(k + j)!Ak =
1X
i=j
ti
i!Ai¡j = A¡j
1X
i=j
ti
i!Ai =
= A¡j
Ã1X
i=0
ti
i!Ai¡
j¡1X
i=0
ti
i!Ai
!
= A¡j
Ã
G0 (t)¡
j¡1X
i=0
ti
i!Ai
!
j = 1; 2; :::
Este procedimiento, tiene el inconveniente de necesitar el cálculo de las matrices
inversas A¡1; A¡2; ... además del cálculo de G0 (t) :

17
1.4.3 Mediante la ley de recurrencia
Por la fórmula de recurrencia (corolario no 4) resulta que:
Gj+1 (t) = A¡1
µ
Gj (t) ¡tj
j !I
¶
; j = 0; 1; :::
obteniéndose en particular:
G1 (t) = A¡1 (G0 (t) ¡ I)
G2 (t) = A¡1 (G1 (t) ¡ tI )
...
de tal forma que una vez calculada G0 (t) = eAt, podemos conocer por aplicación de la
recurrencia las G-funciones de Scheifele que precisemos. El problema queda reducido
al cálculo de G0 (t) :
Este método presenta la ventaja respecto al anterior de que sólo hay que calcular
A¡1, reduciendo así los errores de cálculo.
1.4.4 Mediante el procedimiento de eliminacion lineal de Ri-
chardson
Aplicado sólo al cálculo de la función G0
Abordaremos el cálculo de G0 (t) = eAt, basándonos en los resultados expuestos por
Walz [92],[93], cuyo método es una aplicación del llamado método de eliminación para
el caso matricial, que ya era conocido para el caso escalar [58],[59].

18
De…nition 9 Sea ½1; ½2 ; ::: una sucesión de números complejos tales que 0 < Re ½1 <
Re ½2 < ...Sea I un intervalo real o un dominio complejo y S = f¾n(x)gn2N una
sucesión de funciones de…nidas en I. Se dice que S posee una expansión asintótica
(logarítmica) de orden m (m 2 N ó m = 1), si existen funciones f (x) y c¹(x) con ¹
= 1, ... , m , todas ellas independientes de n, tal que para todo x 2 I se veri…ca la
siguiente ecuación:
¾n(x) = f(x)+mX
¹=1
c¹(x)
n½¹+ O(n¡Re ½m+1) para n ! 1
Obviamente: limn!1
¾n(x) = f(x) y podemos usar ¾n(x) como una aproximación
de f(x) en I.
Esta aproximación presenta el problema de la lentitud de la convergencia de ¾n(x)
(el orden de convergencia es n¡½1 ), que hace poco e…ciente este método de aproxima-
ción; para paliar esta di…cultad emplearemos el procedimiento de eliminación lineal
de Richardson.
Lemma 10 Si ¾n(x) posee una expansión asintótica, del tipo anterior; escogiendo
un número
kmax 2 N con kmax < m
de…nimos:
y(0)i (x) = ¾2i(x) ; i = 0; :::; kmax
y(k)i (x) = y(k¡1)i+1 (x) +1
2½k ¡ 1
³y(k¡1)i+1 (x) ¡ y (k¡1)i (x)
´
con k = 1; :::; kmax; i = 0; :::; kmax ¡ k entonces las sucesiones
ny(k)i (x)
o
i2N

19
poseen la expansión asintótica:
y (k)i (x) = f (x)+mX
¹=k+1
c(k)¹ (x) ¢ 2¡i½¹ +O(2¡iRe ½m+1 ) para i ! 1
siendo 2¡i½k+1 el orden de convergencia de y(k)i .
Por regla general se elige el número y(kmax)0 (x) como una aproximación de f (x).
En [92],[93] se encuentran numerosos ejemplos, que muestran la e…ciencia de este
algoritmo en el caso escalar.
Proposition 11 La sucesión ¾n(x) =¡1 + x
n
¢ntiene una expansión asintótica f (x) =
ex.
D/.
Dado que:
ln(1 +x
n) =
x
n+
1X
¹=1
(¡1)¹
¹ + 1¢³x
n
´¹+1
entonces:
ln(1 +x
n)n = x+
1X
¹=1
(¡1)¹
¹ +1¢x¹+1
n¹= x+ S(n; x)
luego:
¾n(x) =³1 +
x
n
´n= ex+S(n;x) =
= exÃ
1+1X
¸=1
(S(n; x))¸
¸!
!
=
= ex+1X
¸=1
ex
¸!¢ (S(n; x))¸
De
S(n; x) =1X
¹=1
(¡1)¹
¹+ 1¢x¹+1
n¹=
1X
¹=1
¯¹+1;¹ ¢x¹+1
n¹

20
obtenemos:
(S(n; x))º =1X
¹=1
¯¹+2º¡1;¹+º¡1 ¢x¹+2º¡1
n¹+º¡1
entonces:
1X
¸=1
ex
¸!¢ (S(n; x))¸ =
= ex
Ã1X
¹=1
¯¹+1;¹ ¢x¹+1
1!n¹+ : : :+
1X
¹=1
¯¹+2p¡1;¹+p¡1 ¢x¹+2º¡1
p!n¹+º¡1+ : : :
!
=
= exµµ
¯21x2
1!
¶1
n+ : : :+
µ¯p+1;px
p+1
1!+ : : : +
¯2p;px2p
p!
¶1
np+ : : :
¶
llamando:
cº(x) = ex
µ¯º+1;º1!
¢ xº+1 + : : : +¯2º;ºº !
¢ x2º¶
y de…niendo
®º+j;º =¯º+j;º
j !
tenemos que:
cº(x) = ex¡®º+1;º ¢ xº+1 + : : : +®2º;º ¢ x2º
¢= ex
2ºX
i=º+1
®i;º ¢ xi
que no dependen de n.
Por consiguiente:
¾n(x) = ex+
X
º=1
cº(x)
nº:Ä
Theorem 12 Para un número complejo a y un número real ½ > 0, consideremos:
E(a; ½) = fz 2 C 0 jz ¡ aj < ½g
si f(z) es una función escalar, que admite una representación de la forma:
f(z) =1X
º=0
®º (z ¡ a)º

21
entonces para cada matriz cuadrada A, cuyos valores propios están en E(a; ½), la
matriz:
f (A) =1X
º=0
®º (A¡ aI)º
está bien de…nida [81].
Como consecuencia inmediata de este teorema, muchas funciones escalares cono-
cidas, se pueden rede…nir como funciones de matrices. En particular:
exp(A) = eA = I+1X
º=1
1
º !Aº
está bien de…nida, para cualquier matriz cuadrada A.
Una procedimiento inmediato para el cálculo numérico de eA consistiría en una
truncación del desarrollo anterior, presentando el inconveniente de un excesivo número
de multiplicaciones de matrices.
Existen otros métodos para la computación numérica de eA, tales como los descri-
tos en el los artículos de Moler y Van Loan [61] y Stickel [81]. Todos estos métodos
muestran algunas desventajas: inestabilidades numéricas, largo tiempo de computa-
ción y aplicabilidad para cierta clase de matrices. Recientemente se utilizan aproxi-
maciones en subespacios de Krylov [7], para la matriz exponencial [47].
El método de eliminación de Richardson se puede generalizar a funciones de ma-
trices [81] y no presenta ninguna de las di…cultades anteriores.
Theorem 13 Sea f (z) una función escalar uno-uno de…nida en
E(0; ½) = fz 2 C 0 jzj < ½g
22
con ½ > 0, tal que:
f(z) =1X
º=0
®ºzº con ®1 6= 0
entonces, para cada matriz cuadrada A con valores propios en E(0; ½), las funciones:
f (A)
y
¾n(A) = n ¢ ®1 ¢ f¡1µ1
n¢ f (A)
¶
están bien de…nidas. Además, se veri…ca la ecuación:
¾n(A) = f (A)+1X
º=1
1
nÀ¢ cÀ (A) 8n 2 N
Aplicando los resultados anteriores, podemos enunciar la siguiente proposición:
Proposition 14 La sucesión ¾n(A) =¡I + 1
nA¢n
tiene una expansión asintótica
f(A) = eA
Extendiendo el (lema no10) al caso matricial, obtenemos el algoritmo siguiente,
para el cálculo numérico de eA [93]:
(1) Escoger un índice maximal kmax.
(2) Desde i = 0 a kmax calcular Y (0)i = ¾2i(A)
(3) Desde k = 1 a kmax y desde i = 0; :::; (kmax ¡ k)
calcular
Y (k)i = Y (k¡1)i+1 + 12k¡1
¢³Y (k¡1)i+1 ¡ Y (k¡1)i
´
(4) Usar Y (kmax)0 como aproximación de eA

23
Como G0 (t) = eAt, bastará aplicar este algoritmo para obtener la primera de las
G-funciones de Scheifele; para el cálculo de las restantes, bastaría aplicar la relación
de recurrencia de (corolario no 4).
Se expone un procedimiento Maple V Release 4 que implementa el algoritmo,
anteriormente expuesto. Ver Anexo I.
Se ha elegido este código de cálculo simbólico, por la comodidad de programa-
ción, pues permite incorporar la matriz que de…ne el sistema como parámetro del
procedimiento.
Aplicado al cálculo de todas las G-funciones
El procedimiento anterior, no evita el cálculo de la matriz inversa del sistema, que
aparece en la recurrencia. Para evitar el cálculo de A¡1, procederemos como sigue.
Se ha demostrado que la función:
g0(x) = ex = 1+ x+
x2
2!+ : : :
es una expansión asintótica de:
¾(0)n (x) =³1 +
x
n
´n
Una generalización de lo anterior sería:
g1(x) =ex ¡ 1
x= 1+
x
2!+x2
3!+ : : :
es una expansión asintótica de:
¾(1)n (x) =nX
k=1
µn
k
¶xk¡1
nk:

24
y
g2(x) =ex ¡ 1¡ x
x2=1
2!+x
3!+x2
4!+ : : :
es una expansión asintótica de:
¾(2)n (x) =nX
k=2
µn
k
¶xk¡2
nk:
y que:
g3(x) =ex ¡ 1 ¡ x¡ x2
2!
x3=1
3!+x
4!+x2
5!+ : : :
es una expansión asintótica de:
¾(3)n (x) =nX
k=2
µn
k
¶xk¡3
nk¡
1
2!x:
...
En efecto:
Proposition 15 Las sucesiones:
¾(1)n (x) =nX
i=1
µn
i
¶xi¡1
ni
¾(2)n (x) =nX
i=2
µn
i
¶xi¡2
ni
y
¾(j)n (x) =nX
i=2
µn
i
¶xi¡j
ni¡
j¡1X
i=2
xi¡j
i!con j = 3
tienen por expansiones asintóticas a:
g1(x) =ex ¡ 1
x
g2(x) =ex ¡ 1¡ x
x2
25
y
gj(x) =1
xj
Ã
ex¡
j¡1X
i=0
xi
i!
!
respectivamente.
D/.
Dado que:
¾(0)n (x) = ex+
X
º=1
cº(x)
nº
Para el caso de ¾(1)n (x):
Como:
1
x
¡¾(0)n (x) ¡ 1
¢=1
x
0
@ex+X
º=1
cº(x)
nº¡ 1
1
A =1
x(ex ¡ 1) +
X
º=1
c1º(x)
nº
y
1
x
¡¾(0)n (x)¡ 1
¢=1
x
ÃnX
i=0
µn
i
¶xi
ni¡ 1
!
=nX
i=1
µn
i
¶xi¡1
ni= ¾(1)n (x)
entonces:
¾(1)n (x) =1
x(ex ¡ 1) +
X
º=1
c1º(x)
nº:
Para el caso de ¾(2)n (x):
Como:
1
x2
³¾(0)n (x) ¡ 1 ¡
x
1!
´=
=1
x2
0
@ex+X
º=1
cº(x)
nº¡ 1¡
x
1!
1
A =
=1
x2
³ex ¡ 1¡
x
1!
´+
X
º=1
c2º(x)
nº

26
y
1
x2
³¾(0)n (x)¡ 1 ¡
x
1!
´=
=1
x2
ÃnX
i=0
µn
i
¶xi
ni¡ 1¡ x
!
=
=nX
i=2
µn
i
¶xi¡2
ni= ¾(2)n (x)
entonces:
¾(2)n (x) =1
x2
³ex ¡ 1¡
x
1!
´+
X
º=1
c2º(x)
nº:
Para demostrar el caso general ¾(j)n (x) con j = 3, procederemos de un modo
análogo:
Dado que:
1
xj
Ã
¾(0)n (x)¡j¡1X
i=0
xi
i!
!
=
=1
xj
Ã
ex¡j¡1X
i=0
xi
i!
!
+X
º=1
cº(x)
xjnº=
=1
xj
Ã
ex¡j¡1X
i=0
xi
i!
!
+X
º=1
cjº(x)
nº
y como:
1
xj
Ã
¾(0)n (x)¡
j¡1X
i=0
xi
i!
!
=
=1
xj
ÃnP
i=2
µn
i
¶xi
ni¡
j¡1X
i=2
xi
i!
!
=
=nX
i=2
µn
i
¶xi¡j
ni¡
j¡1X
i=2
xi¡j
i!= ¾(j)n (x)
entonces:
¾(j)n (x) =1
xj
Ã
ex¡
j¡1X
i=0
xi
i!
!
+X
º=1
cjº(x)
nº:Ä
Si H 2 M(n,R), extendiendo el resultado anterior, al caso matricial, tenemos que:
G0(H) = eH

27
es una expansión asintótica de
¾(0)n (H) =
µ
I +H
n
¶n
y
G1(H) = H¡1
¡eH ¡ I
¢
es una expansión asintótica de
¾(1)n (H ) =nX
k=1
µn
k
¶Hk¡1
nk
análogamente
G2(H) = H¡2
¡eH ¡ I ¡ H
¢
es una expansión asintótica de
¾(2)n (H ) =nX
k=2
µn
k
¶Hk¡2
nk
para j = 3, tenemos que:
Gj(H) = H¡j
Ã
eH¡
j¡1X
i=0
Hi
i!
!
es una expansión asintótica de
¾(j)n (H) =nX
i=2
µn
i
¶Hi¡j
ni¡
j¡1X
i=2
Hi¡j
i!
Las funciones Gj(H) con j = 0, se pueden calcular, aplicando el procedimiento de
eliminación lineal de Richardson. Tomando H = At y considerando H0 = I tenemos:
Para el cálculo de Gj , para j = 0; por (corolario no 4) :
Gj(At) = (At)¡j
Ã
eAt¡
j¡1X
k=0
(At)k
k!
!
=1
tj¢ A¡j
Ã
eAt¡
j¡1X
k=0
Aktk
k!
!
=1
tj¢ Gj(t)
28
de donde:
Gj(t) = tj ¢ Gj(At)
A continuación se expone un procedimiento Maple V Release 4 que implementa
los algoritmos, anteriormente expuestos.
Procedimiento Maple V, para el cálculo de G1(t): Ver Anexo II.
Procedimiento Maple V, para el cálculo de G2(t): Ver Anexo III.
Procedimiento Maple V, para el cálculo de Gj(t) con j = 3: Ver Anexo IV.
En estos procedimientos, cabe resaltar, que no ha sido necesario el cálculo de la
inversa de ninguna matriz.
Utilizando este procedimiento, una forma alternativa y mas ágil, pues no requiere
el cálculo de las G-funciones, una a una, y no involucra el cálculo de la inversa de una
matriz, sería la siguiente:
(1) Calcular Gp(At), para p 2 N, su…cientemente alto.
(2) Computar Gp(t) = tpGp(At).
(3) Computar: Gj (t) = AGj+1 (t) + tj
j !I , j = (p¡ 1); :::; 0
1.5 Notas a los métodos de cálculo de G-funciones
En los casos en que la integración numérica del sistema lineal perturbado sea difícil,
como cuando los autovalores de A di…eren mucho, el cálculo de las G-funciones puede
presentar di…cultades.
Si los autovalores de A están en un pequeño entorno de cero y el tamaño de paso
es pequeño, el desarrollo en serie será adecuado para los cálculos de las Gj(h).

29
Para valores grandes de h; G0(h) podría ser calculado por métodos elementales,
usando funciones exponenciales y polinómicas. Las Gj(h) con j su…cientemente alto
se calculan entonces por la relación de recurrencia, expresada en este capítulo, la cual
requiere la matriz A¡1, y el proceso puede resultar numéricamente inestable.
En el caso en el que el desarrollo en serie de las Gj(h), no permite obtener el valor
de G0(h) hasta Gm(h) con una exactitud su…ciente, se determinarán estos valores por
un método de integración numérico ordinario. Es decir se integran las ecuaciones dife-
renciales que aparecen en la de…nición de las G-funciones, usando un tamaño de paso
de integración pequeño, comparado con [0; h]. Obsérvese, que este procedimiento,
francamente laborioso, sólo se realiza, una vez, al comienzo del método [74], [82].
Una alternativa, a estos métodos numéricos, es el procedimiento de eliminación
lineal de Richardson que permite el cálculo de las Gj(h) con mejor precisión [93].
1.6 Las G-funciones de Scheifele como método de
integración numérica
Se trata pues de integrar numéricamente el sistema siguiente:
x0
= Ax + " ¢ f (x;t)
x(0) = x0
donde
x : R ¡! Rm
A 2 M(m;R)

30
f : Rm £ R ¡! Rm
Para integrar este sistema con el método de las G-funciones, desarrollábamos la
función f (x;t) en la forma
f (x;t) =1X
k=0
tk
k!ck+1
y la solución, en términos de las G-funciones, venía dada por
x(t) = G0(t)x0 + "1X
k=1
Gk(t)ck
donde los ck son las derivadas de la función de perturbación
f (x(t);t) = g(t) = (g1(t); :::; gm(t))
Denotando por ti = ti¡1 + hi , i = 1; 2; :::, la malla de puntos en [a; b] y por
xi la aproximación a x(ti), suponiendo que tenemos calculada xn, para obtener una
aproximación de x(tn+1), consideramos el P.V.I.:
x0= Ax + " ¢ f (x;t)
x(tn) = xn
y al realizar el cambio de variable independiente: ¿ = t ¡ tn, el problema anterior se
transforma en:
x0= Ax + " ¢ f (x;¿ + tn)
x(0) = xn

31
El método de las G-funciones nos permite expresar xn+1 del modo siguiente:
xn+1 = G0(hn+1)xn + "pX
j=1
Gj(hn+1)gj¡1)(tn)
En esta sección, expondremos algunos ejemplos de aplicación de las G-funciones
de Scheifele, como método de integración numérica para el cálculo aproximado de las
soluciones de sistemas lineales perturbados.
Asimismo, se realizarán los acondicionamientos de dichos problemas, que sean ne-
cesarios, para una mayor facilidad en el cálculo aproximado de las soluciones mediante
el método de las G-funciones de Scheifele.
1.6.1 Ejemplo 1
Ejemplo propuesto, en [19].
Sea el sistema:
x 0
1= x
1
x 0
2= x
2+"
qx1
con las condiciones iniciales:
x1(0) = 1 ; x
2(0) = 0
cuya solución es:
x1(t) = et
x2(t) = 2" ¢ et(1 ¡ e¡
t2 )
32
Con el …n de acondicionar el problema, para su integración, se recurrirá a in-
troducir unas variables auxiliares, procedimiento que fue empleado por Ste¤ensen
[77],[78],[79], en la aplicación de métodos de series de Taylor.
De…niendo:
x3=
qx1
el sistema anterior se transforma en:
x 0
1= x
1
x 0
2= x
2+" ¢ x
3
x 0
3=
1
2¢ x
3
con autovalores: 1 (doble) y 12
(simple) y condiciones iniciales:
x1(0) = 1 ; x
2(0) = 0 ; x
3(0) = 1
Escribiendo el nuevo sistema en forma matricial:
0
BBBBBB@
x1
x2
x3
1
CCCCCCA
0
=
0
BBBBBB@
1 0 0
0 1 0
0 0 12
1
CCCCCCA
¢
0
BBBBBB@
x1
x2
x3
1
CCCCCCA
+ " ¢
0
BBBBBB@
0
x3
0
1
CCCCCCA
Sea x(t), la solución del problema anterior, que suponemos analítica, entonces:
0
BBBBBB@
x1
x2
x3
1
CCCCCCA
=1X
k=0
tk
k!¢
0
BBBBBBB@
ak;1
ak;2
ak;3
1
CCCCCCCA

33
que sustituída en la expresión anterior da lugar a:0
BBBBBBB@
ak+1;1
ak+1;2
ak+1;3
1
CCCCCCCA
=
0
BBBBBB@
1 0 0
0 1 0
0 0 12
1
CCCCCCA
¢
0
BBBBBBB@
ak;1
ak;2
ak;3
1
CCCCCCCA
+ " ¢
0
BBBBBB@
0
ak;3
0
1
CCCCCCA
que nos permite de…nir la siguiente sucesión de coe…cientes:
b0 = a00
BBBBBBB@
bk;1
bk;2
bk;3
1
CCCCCCCA
=
0
BBBBBB@
0
" ¢ ak¡1;3
0
1
CCCCCCA
con k = 1; 2; : : :
De esta forma ya podemos escribir la solución del problema en términos de G-
funciones de Scheifele, [74] como sigue
x(t) =1X
k=0
Gk(t) ¢
0
BBBBBBB@
bk;1
bk;2
bk;3
1
CCCCCCCA
una vez obtenido el valor de las G-funciones, denotando por x1 la aproximación a
x(h); la aproximación a la solución vendrá dada de la forma siguiente:
x1 =mX
k=0
Gk(t) ¢
0
BBBBBBB@
bk;1
bk;2
bk;3
1
CCCCCCCA
Para efectuar un segundo paso de integración se toma x1 como valor inicial y se realiza
el mismo proceso. No es necesario calcular el valor de las G-funciones por tenerlo del
primer paso.
34
Resumiendo, una vez obtenido el valor de las G-funciones, cada paso se completa
mediante el algoritmo siguiente:
a0 = xi0
BBBBBBB@
ak+1;1
ak+1;2
ak+1;3
1
CCCCCCCA
=
0
BBBBBB@
1 0 0
0 1 0
0 0 12
1
CCCCCCA
¢
0
BBBBBBB@
ak;1
ak;2
ak;3
1
CCCCCCCA
+ " ¢
0
BBBBBB@
0
ak;3
0
1
CCCCCCA
desde k = 0; :::
b0 = a00
BBBBBBB@
bk;1
bk;2
bk;3
1
CCCCCCCA
=
0
BBBBBB@
0
" ¢ ak¡1;3
0
1
CCCCCCA
desde k = 1; :::
xi+1 =mX
k=0
Gk(t) ¢
0
BBBBBBB@
bk;1
bk;2
bk;3
1
CCCCCCCA
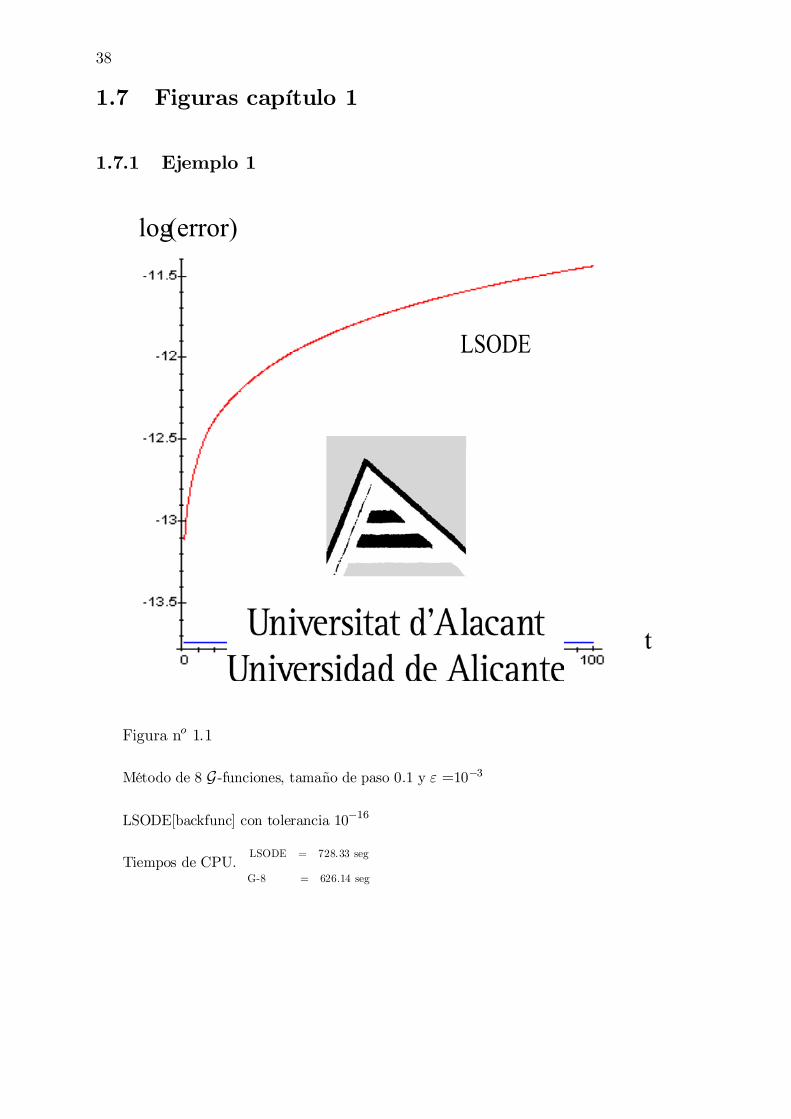
En la (Figura no 1.1) se muestra el resultado obtenido al comparar el método
de las G-funciones con un método LSODE de tol = 10¡16. Para el método de las
G-funciones se tomaron ocho funciones G, la integración se realizó hasta t = 100, con
paso h = 001 y " = 10¡3.
1.6.2 Ejemplo 2
Ejemplo propuesto, en [26]
35
Consideremos un oscilador con perturbación resonante:
x 0
1(t) = x
2
x 0
2(t) = ¡x
1+" cos t
con las condiciones iniciales:
x1(0) = 1 ; x
2(0) = 0
cuya solución es:
x1(t) = cos(t) + "
2 t sin(t)
x2(t) =
¡"2
¡ 1¢sin(t) + "
2t cos(t)
Para facilitar la integración de…nimos:
x3= cos(t)
x4= sin(t)
y el sistema anterior se transforma en:
x 0
1= x
2
x 0
2= ¡x
1+" ¢ x
3
x 0
3= ¡x
4
x 0
4= x
3
con autovalores complejos: i (doble) y ¡i (doble) y condiciones iniciales:
x1(0) = 1 ; x
2(0) = 0 ; x
3(0) = 1 ; x
4(0) = 0

36
Escribiendo el nuevo sistema en forma matricial:0
BBBBBBBBBB@
x1
x2
x3
x4
1
CCCCCCCCCCA
0
=
0
BBBBBBBBBB@
0 1 0 0
¡1 0 0 0
0 0 0 ¡1
0 0 1 0
1
CCCCCCCCCCA
¢
0
BBBBBBBBBB@
x1
x2
x3
x4
1
CCCCCCCCCCA
+ " ¢
0
BBBBBBBBBB@
0
x3
0
0
1
CCCCCCCCCCA
Sea x(t), la solución del problema, que suponemos analítica, como en el Ejemplo
1.
Obteniéndose las siguientes recurrencias:0
BBBBBBBBBBB@
ak+1;1
ak+1;2
ak+1;3
ak+1;4
1
CCCCCCCCCCCA
=
0
BBBBBBBBBB@
0 1 0 0
¡1 0 0 0
0 0 0 ¡1
0 0 1 0
1
CCCCCCCCCCA
¢
0
BBBBBBBBBBB@
ak;1
ak;2
ak;3
ak;4
1
CCCCCCCCCCCA
+ " ¢
0
BBBBBBBBBB@
0
ak;3
0
0
1
CCCCCCCCCCA
0
BBBBBBBBBBB@
bk;1
bk;2
bk;3
bk;4
1
CCCCCCCCCCCA
=
0
BBBBBBBBBB@
0
" ¢ ak¡1;3
0
0
1
CCCCCCCCCCA
De este modo podemos escribir la solución del problema en términos de G-funciones
de Scheifele, como sigue:
x(t) =1X
k=0
Gk(t) ¢
0
BBBBBBBBBBB@
bk;1
bk;2
bk;3
bk;4
1
CCCCCCCCCCCA

37
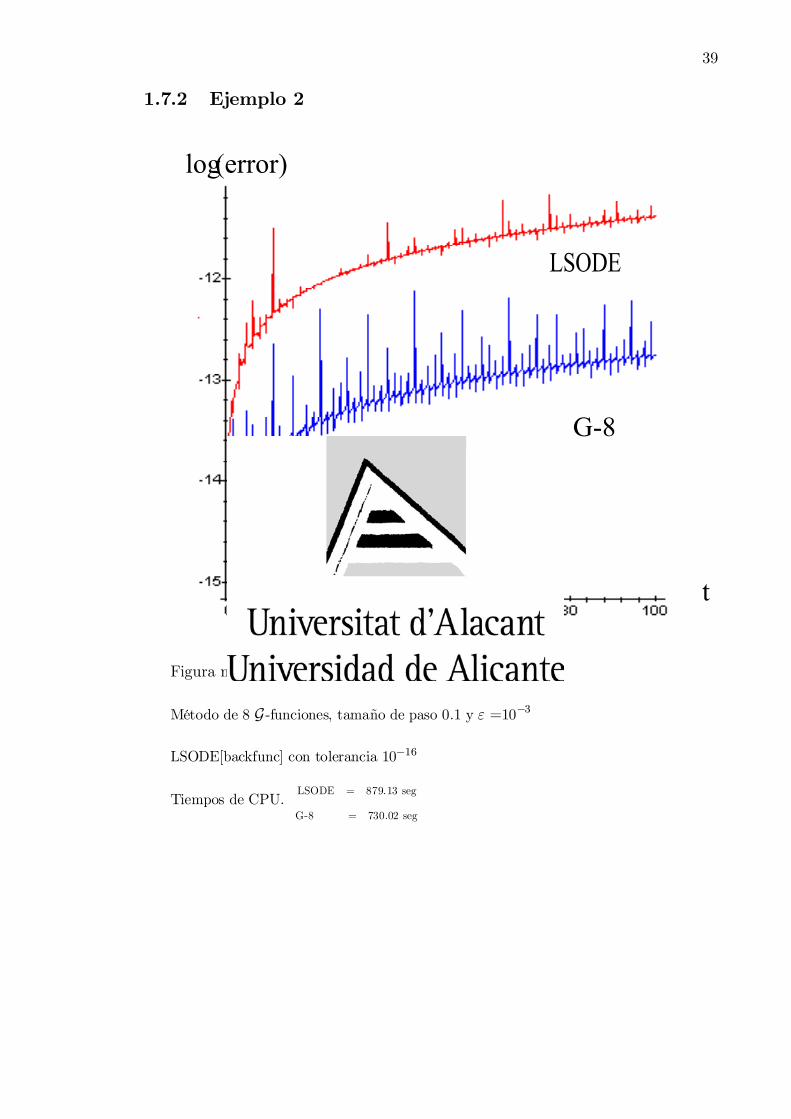
En la (Figura no 1.2) se muestra el resultado obtenido al comparar el método
de ocho G-funciones con un método LSODE de tol = 10¡16. Para el método de las
G-funciones se tomaron ocho funciones G, la integración se realizó hasta t = 100, con
paso h = 001 y " = 10¡3.
1.6.3 Notas a los ejemplos del capítulo
Aunque los tiempos de CPU, tal como consta a pie de las …guras 1.1 y 1.2, son
sensiblemente mejores en el método de las G-funciones, éste es poco operativo debido a
que exige, como paso previo, la normalización del problema y presenta la considerable
di…cultad, de tener que construir en cada caso un fórmula recurrente para el cálculo
de los coe…cientes. De hecho el método de Scheifele es prácticamente imposible de
utilizar si los términos de perturbación son funciones complicadas.
38
1.7 Figuras capítulo 1
1.7.1 Ejemplo 1
t
log(error)
LSODE
G-8
Figura no 1.1
Método de 8 G-funciones, tamaño de paso 0.1 y " =10¡3
LSODE[backfunc] con tolerancia 10¡16
Tiempos de CPU.LSODE = 728.33 seg
G-8 = 626.14 seg
39
1.7.2 Ejemplo 2
t
G-8
LSODE
log(error)
Figura no 1.2.
Método de 8 G-funciones, tamaño de paso 0.1 y " =10¡3
LSODE[backfunc] con tolerancia 10¡16
Tiempos de CPU.LSODE = 879.13 seg
G-8 = 730.02 seg

40

Capítulo 2
Métodos numéricos multipaso
variable para la integración de
sistemas lineales perturbados
2.1 Introducción
En este capítulo se introduce un método multipaso variable adaptado para la resolu-
ción de sistemas lineales perturbados:
x0
= Ax + " ¢ f (x;t)
x(0) = x0
donde
x : R ¡! Rm ; A 2 M(m;R) ; f : Rm £ R ¡! Rm
Para la integración de este sistema, mediante un método multipaso variable, que
41

42
integre exactamente el problema homogéneo, partimos de un método que ya posee
esta propiedad, el método de G-funciones, desarrollado en el capítulo anterior.
La solución, en términos de las G-funciones, venía dada por
x(t) = G0(t)x0 + "1X
k=1
Gk(t)ck
donde los ck son las derivadas de la función de perturbación f (x(t);t) = g(t) =
(g1(t); :::; gm(t)).
Las G-funciones, como método de integración numérica, nos permite escribir:
xn+1 = G0(hn+1)xn + "pX
j=1
Gj(hn+1)gj¡1)(tn)
El cálculo de las gj¡1)(tn) es difícil para expresiones complicadas de la función de
perturbación, lo que di…culta su implementación en un computador.
El método multipaso que se presenta en este capítulo integra exactamente el pro-
blema homogéneo, y presenta la ventaja, frente al método de las G-funciones, de
la existencia de un procedimiento algebraico sencillo para la computación de los
coe…cientes del método, independientemente de cual sea el orden, lo que nos per-
mite lograr fácilmente cualquier método tanto de orden alto como de orden bajo
[15],[44],[48],[50],[53]. Esto se conseguirá aproximando las derivadas que aparecen
en el método de las G-funciones mediante diferencias divididas [60],[87],[89]. Tra-
bajaremos tanto métodos explícitos como métodos implicítos, que nos permitirán la
implementación de un método predictor corrector.

43
2.2 Método explícito de p pasos E.I.pE para siste-
mas lineales perturbados
Sea g : [a; b] ¡! R, una función real de variable real, representaremos por g[tn; :::; tn¡k]
con k = 0; 1; :::; n a la diferencia dividida de g de orden k en los argumentos tn; :::; tn¡k
de la variable t 2 [a; b] [60]. Consideramos que g(t) es analítica para simpli…car la
exposición.
Para construir un método multipaso variable explícito de p pasos, [88],[89],[90],
utilizamos hasta las diferencias divididas de orden p-1 de la función g(t), en los
argumentos tn; :::; tn¡p+1
De…nition 16 Sea
Pk(t) =tk
k!
y
Hi = tn ¡ tn¡i
Lemma 17 Las diferencias divididas de g (t) satisfacen la igualdad
g[tn; :::; tn¡i] =1X
j=0
Pj [0;¡H1; :::;¡Hi] ¢ gj)(tn)
D/.
Los desarrollos en tn de g(tn¡1); :::; g(tn¡i) nos permite escribir
g[tn; :::; tn¡i] =1X
j=0
cj ¢ gj)(tn)

44
donde las constantes cj dependen sólo de Hi = tn¡tn¡i. Para calcular cj consideramos
el punto tn = 0 y g = Pk, teniendo en cuenta que P j)k (0) = ±k;j , siendo ±k;j la delta
de Kronecker.Ä
Veamos algunos casos:
g[tn] = g(tn)
g[tn; tn¡1] =g[tn]¡ g[tn¡1]
tn ¡ tn¡1=
=1
tn ¡ tn¡1
Ã
g(tn)¡1X
j=0
gj)(tn)
j !¢ (tn¡1 ¡ tn)
j
!
=
=1X
j=1
¡(tn¡1 ¡ tn)j
(tn ¡ tn¡1)j!¢ gj)(tn) =
1X
j=0
cj ¢ gj)(tn)
donde
c0 = 0
cj =¡(tn¡1 ¡ tn)j
(tn ¡ tn¡1)j!con j = 1; 2; :::
comprobemos que los cj anteriores son iguales a Pj[0;¡H1]:
P0[0;¡H1] =1¡ 1
H1= 0 = c0
Pj [0;¡H1] =Pj[0]¡ Pj [¡H1]
H1=
¡(tn¡1¡ tn)j
(tn ¡ tn¡1)j != cj con j = 1; 2; :::
Análogamente
g [tn; tn¡1; tn¡2] =1X
j=1
(tn¡2¡ tn)(tn¡1 ¡ tn)j ¡ (tn¡1¡ tn)(tn¡2 ¡ tn)j
(tn ¡ tn¡1)(tn¡1 ¡ tn¡2)(tn ¡ tn¡2)j !¢ gj)(tn) =
=1X
j=0
cj ¢ gj)(tn)
donde
c0 = 0
45
cj =(tn¡2¡ tn)(tn¡1 ¡ tn)
j ¡ (tn¡1¡ tn)(tn¡2 ¡ tn)j
(tn ¡ tn¡1)(tn¡1¡ tn¡2)(tn ¡ tn¡2)j !con j = 1; 2; :::
comprobándose que
P0[0;¡H1;¡H2] =1
H2
µ0
H1¡
0
¡H1 + H2
¶
= 0 = c0
Pj [0;¡H1;¡H2] =¡H2(¡H1)j + H1(¡H2)j
j!H1H2(H2 ¡ H1)=
=(tn¡2 ¡ tn)(tn¡1 ¡ tn)j ¡ (tn¡1 ¡ tn)(tn¡2 ¡ tn)j
(tn ¡ tn¡1)(tn¡1¡ tn¡2)(tn ¡ tn¡2)j !
= cj con j = 1; 2; :::
Theorem 18 Denotando por Dp;n la matriz siguiente,de orden m£ p
Dp;n =
0
BBBBBBBBBB@
g1[tn] 1!g1[tn; tn¡1] ¢ ¢ ¢ (p¡ 1)!g1[tn; :::; tn¡(p¡1)]
g2[tn] 1!g2[tn; tn¡1] ¢ ¢ ¢ (p¡ 1)!g2[tn; :::; tn¡(p¡1)]
...... ¢ ¢ ¢
...
gm[tn] 1!gm[tn; tn¡1] ¢ ¢ ¢ (p¡ 1)!gm[tn; :::; tn¡(p¡1)]
1
CCCCCCCCCCA
y
H = maxfH1; :::; Hp¡1g
se veri…ca la igualdad:
Dtp;n = Ap
0
BBBBBBBBBB@
g1(tn) ¢ ¢ ¢ gm(tn)
g0
1(tn) ¢ ¢ ¢ g0
m(tn)
......
gp¡1)1 (tn) ¢ ¢ ¢ gp¡1)m (tn)
1
CCCCCCCCCCA
+
0
BBBBBBBBBB@
O(Hp) ¢ ¢ ¢ O(H p)
O(Hp¡1) ¢ ¢ ¢ O(H p¡1)
......
O(H) ¢ ¢ ¢ O(H )
1
CCCCCCCCCCA

46
donde Ap es la matriz cuadrada de orden p
Ap =
0
BBBBBBBBBBBBBB@
1 P1[0] P2[0] ¢ ¢ ¢ Pp¡1[0]
0 1 1!P2[0;¡H1] ¢ ¢ ¢ 1!Pp¡1[0;¡H1]
0 0 1 ¢ ¢ ¢ 2!Pp¡1[0;¡H1;¡H2]
......
.... ..
...
0 0 0 ¢ ¢ ¢ 1
1
CCCCCCCCCCCCCCA
p£p
D/.
Aplicando a cada uno de los campos componentes gi(t) con i = 1; :::; m de la
función de perturbación g(t) el (lema no 17) y el hecho de que Pj [H1; :::; Hi+1] es de
orden j ¡ i en H, se obtienen las siguientes igualdades:
gi[tn] = P0[0]gi(tn) + P1[0]g0
i(tn) + ¢ ¢ ¢ + Pp¡1[0]gp¡1)i (tn) + O(H
p)
gi[tn; tn¡1] = P0[0;¡H1]gi(tn) + P1[0;¡H1]g0
i(tn) + ¢ ¢ ¢
¢ ¢ ¢ + Pp¡1[0;¡H1]gp¡1)i (tn) + O(H
p¡1)
...
gi[tn; :::; tn¡(p¡1)] = P0[0;¡H1;:::;¡Hp¡1]gi(tn) +P1[0;¡H1;:::;¡Hp¡1]g0
i(tn) + ¢ ¢ ¢
¢ ¢ ¢ + Pp¡1[0;¡H1;:::;¡Hp¡1]gp¡1)i (tn) + O(H)
matricialmente0
BBBBBBBBBB@
g1[tn] g2[tn] ¢ ¢ ¢ gm[tn]
g1[tn; tn¡1] g2[tn; tn¡1] ¢ ¢ ¢ gm[tn; tn¡1]
...... ¢ ¢ ¢
...
g1[tn; :::; tn¡(p¡1)] g2[tn; :::; tn¡(p¡1)] ¢ ¢ ¢ gm[tn; :::; tn¡(p¡1)]
1
CCCCCCCCCCA
=
47
=
0
BBBBBBBBBB@
P0[0] P1[0] ¢ ¢ ¢ Pp¡1[0]
P0[0;¡H1] P1[0;¡H1] ¢ ¢ ¢ Pp¡1[0;¡H1]
...... ¢ ¢ ¢
...
P0[0;¡H1; :::;¡Hp¡1] P1[0;¡H1; :::;¡Hp¡1] ¢ ¢ ¢ Pp¡1[0;¡H1; :::;¡Hp¡1]
1
CCCCCCCCCCA
£
0
BBBBBBBBBB@
g1(tn) g2(tn) ¢ ¢ ¢ gm(tn)
g0
1(tn) g0
2(tn) ¢ ¢ ¢ g0
m(tn)
...... ¢ ¢ ¢
...
gp¡1)1 (tn) gp¡1)2 (tn) ¢ ¢ ¢ gp¡1)m (tn)
1
CCCCCCCCCCA
+
0
BBBBBBBBBB@
O(Hp) O(Hp) ¢ ¢ ¢ O(H p)
O(Hp¡1) O(Hp¡1) ¢ ¢ ¢ O(H p¡1)
...... ¢ ¢ ¢
...
O(H) O(H) ¢ ¢ ¢ O(H )
1
CCCCCCCCCCA
representando, simbólicamente el producto anterior, se obtiene la ecuación:
Xp£m = Yp£p £ Zp£m +Op£m
pudiéndose escribir la matriz Yp£p en la forma:
Yp£p =
0
BBBBBBBBBBBBBB@
1 0 0 ¢ ¢ ¢ 0
0 1 P2[0;¡H1] ¢ ¢ ¢ Pp¡1[0;¡H1]
0 0 12! ¢ ¢ ¢ Pp¡1[0;¡H1;¡H2]
......
.... . .
...
0 0 0 ¢ ¢ ¢ 1(p¡1)!
1
CCCCCCCCCCCCCCA
Sustituyendo en la ecuación precedente y efectuando las transformaciones elemen-
tales pertinentes para eliminar los cocientes de factoriales, resulta:
Dtp;n = Ap £ Zp£m + Op£m Ä
Corollary 19 La matriz Ap es inversible.
D/.
La demostración es inmediata, pues det(Ap) = 1 Ä
48
2.2.1 Estableciendo el método multipaso explícito
Truncando el desarrollo obtenido en (teorema no 18) y despejando Zp£m resulta:
Zp£m = A¡1p £ (Dt
p;n)p£m
remplazando en xn+1 = G0(hn+1)xn + "pP
j=1
Gj(hn+1)gj¡1)(tn) las derivadas de los
campos componentes de la función de perturbación podemos escribir:
xn+1 = G0(hn+1)xn + "
pX
j=1
Gj(hn+1)pj
siendo pj con j = 1; :::; p la j-ésima columna de la matriz Z t. Al ser Z t = Dp;n £ A¡tp
bastará tomar pj como la columna j-ésima de la matriz Dp;n £ A¡tp .
Designando por (dij)p£p = A¡tp resulta:
Dp;n£A¡tp =
0
BBBBBBBBBBB@
pP
i=1
g1[tn; :::; tn¡(i¡1)]di1(i ¡ 1)! ¢ ¢ ¢pP
i=1
g1[tn; :::; tn¡(i¡1)]dip(i ¡ 1)!
pP
i=1
g2[tn; :::; tn¡(i¡1)]di1(i ¡ 1)! ¢ ¢ ¢pP
i=1
g2[tn; :::; tn¡(i¡1)]dip(i ¡ 1)!
... ¢ ¢ ¢...
pP
i=1
gm[tn; :::; tn¡(i¡1)]di1(i ¡ 1)! ¢ ¢ ¢pP
i=1
gm[tn; :::; tn¡(i¡1)]dip(i ¡ 1)!
1
CCCCCCCCCCCA
donde Dp;n £ A¡tp es una matriz de orden m£ p cuya j ¡ ¶esima columna pj es:
pj =
0
BBBBBBBBBBB@
pP
i=1
g1[tn; :::; tn¡(i¡1)]dij(i ¡ 1)!
pP
i=1
g2[tn; :::; tn¡(i¡1)]dij(i ¡ 1)!
...
pP
i=1
gm[tn; :::; tn¡(i¡1)]dij(i ¡ 1)!
1
CCCCCCCCCCCA

49
que sustituída enpP
j=1
Gj(hn+1)pj permite escribir:
pX
j=1
Gj(hn+1)pj =pX
j=1
Gj(hn+1)
0
BBBBBBBBBBB@
pP
i=1
g1[tn; :::; tn¡(i¡1)]dij(i ¡ 1)!
pP
i=1g2[tn; :::; tn¡(i¡1)]dij(i ¡ 1)!
...
pP
i=1
gm[tn; :::; tn¡(i¡1) ]dij(i ¡ 1)!
1
CCCCCCCCCCCA
=
=
pX
j=1
Gj(hn+1)
0
BBBBBBBBBB@
pX
i=1
(i ¡ 1)!dij
0
BBBBBBBBBB@
g1[tn; :::; tn¡(i¡1)]
g2[tn; :::; tn¡(i¡1)]
...
gm[tn; :::; tn¡(i¡1)]
1
CCCCCCCCCCA
1
CCCCCCCCCCA
=
=pX
j=1
0
BBBBBBBBBB@
pX
i=1
(i ¡ 1)!dijGj(hn+1)
0
BBBBBBBBBB@
g1[tn; :::; tn¡(i¡1)]
g2[tn; :::; tn¡(i¡1)]
...
gm[tn; :::; tn¡(i¡1)]
1
CCCCCCCCCCA
1
CCCCCCCCCCA
=
=
pX
i=1
0
BBBBBBBBBB@
ÃpX
j=1
(i ¡ 1)!dijGj(hn+1)
!
0
BBBBBBBBBB@
g1[tn; :::; tn¡(i¡1)]
g2[tn; :::; tn¡(i¡1)]
...
gm[tn; :::; tn¡(i¡1)]
1
CCCCCCCCCCA
1
CCCCCCCCCCA
=
=pX
i=1
¤i
0
BBBBBBBBBB@
g1[tn; :::; tn¡(i¡1)]
g2[tn; :::; tn¡(i¡1)]
...
gm[tn; :::; tn¡(i¡1)]
1
CCCCCCCCCCA

50
donde
¤i =
pX
j=1
(i ¡ 1)!dijGj(hn+1) con i = 1; :::; p
Sustituyendo esta última expresión en xn+1 = G0(hn+1)xn + "pP
j=1
Gj(hn+1)pj
conseguimos la fórmula siguiente, para un método multipaso explícito:
xn+1 = G0(hn+1)xn + "
pX
i=1
¤i
0
BBBBBBBBBB@
g1[tn; :::; tn¡(i¡1)]
g2[tn; :::; tn¡(i¡1)]
...
gm[tn; :::; tn¡(i¡1)]
1
CCCCCCCCCCA
De…nition 20 Introducimos la siguiente notación:
²xn es la aproximación al valor de la solución en tn.
²¤i =pP
j=1
(i ¡ 1)!dijGj(hn+1) donde (dij)p£p = A¡tp
²F tn;i =
µ
g1[tn; :::; tn¡(i¡1)]; ¢ ¢ ¢ ; gm[tn; :::; tn¡(i¡1)]
¶
²Inicialización x: x0, x1, x2, x3, ... ,xp¡1.
De…nition 21 El método explícito, con tamaño de paso variable, de p pasos, E.I.pE,
para sistemas lineales perturbados, se formula mediante la ecuación:
xn+1 = G0(hn+1)xn + "
pX
i=1
¤iFn;i con n ¸ p¡ 1
Proposition 22 El método explícito, con tamaño de paso variable, de p pasos, E.I.pE
para sistemas lineales perturbados, es de orden p y " siempre es factor común del error
de truncación en cada paso.
D/.

51
Supongamos que el valor calculado para x en tn es exacto y que también son
exactos los valores de f (x(tn);tn), ..., f (x(tn¡p+1);tn¡p+1).
Estudiemos la siguiente diferencia.
rn+1 = x(tn+1)¡ xn+1 = x(tn + hn+1) ¡ xn+1 =
=1X
j=0
xj)(tn)
j !hjn+1 ¡ G0(hn+1)xn ¡ "
pX
j=1
Gj(hn+1)pj =
=1X
j=0
hjn+1j !
xj)n ¡ G0(hn+1)xn ¡ "
pX
j=1
Gj(hn+1)pj =
=1X
j=0
(Gj(hn+1) ¡ AGj+1(hn+1)) xj)n ¡ G0(hn+1)xn ¡ "
pX
j=1
Gj(hn+1)pj =
=1X
j=1
Gj(hn+1)¡xj)n ¡ Axj¡1)n
¢¡ "
pX
j=1
Gj(hn+1)pj =
= "pX
j=1
Gj(hn+1)¡f j)(x(tn);tn)¡ pj
¢¡ "
1X
j=p+1
Gj(hn+1)fj)(x(tn);tn) =
= "
ÃpX
j=1
Gj(hn+1)¡f j)(x(tn);tn)¡ pj
¢¡
1X
j=p+1
Gj(hn+1)fj)(x(tn);tn)
!
Ä
En esta última expresión, las diferencias que aparecen en el primer sumatorio son
de orden hp¡j+1, como Gj(hn+1) es de orden hj , se obtiene un orden de hp+1. El
segundo sumatorio, es del orden de Gp+1(hn+1), es decir de orden hp+1
Corollary 23 Si " = 0 el metodo E.I.pE para sistemas lineales perturbados es exacto.
D/:
Se deduce trivialmente de la proposición anterior.Ä
Proposition 24 El método explícito, de p pasos, E.I.pE, es consistente de orden p

52
D/.
Para demostrar la consistencia, es su…ciente considerar los resultados obtenidos
en el (teorema no 18) y que Gj(h) = O(hj). Ä
2.3 Método implícito de p pasos E.I.pI para siste-
mas lineales perturbados
Para construir un método implícito, utilizaremos la misma idea que en el apartado
anterior.
Theorem 25 Consideramos hn+1 = tn+1 ¡ tn y sea Hi = tn ¡ tn¡i. Denotando por
Dp;n+1 la matriz siguiente,de orden m£ (p+ 1)
Dp;n+1 =
0
BBBBBBBBBB@
g1[tn+1] 1!g1[tn+1; tn] ¢ ¢ ¢ p!g1[tn+1; :::; tn+1¡p)]
g2[tn+1] 1!g2[tn+1; tn] ¢ ¢ ¢ p!g2[tn+1; :::; tn+1¡p)]
...... ¢ ¢ ¢
...
gm[tn+1] 1!gm[tn+1; tn] ¢ ¢ ¢ p!gm[tn+1; :::; tn+1¡p)]
1
CCCCCCCCCCA
y
H = max fhn+1; H1; :::; Hp¡1g
se veri…ca la igualdad:
Dtp;n+1 = Bp
0
BBBBBBBBBB@
g1(tn) g2(tn) ¢ ¢ ¢ gm(tn)
g0
1(tn) g0
2(tn) ¢ ¢ ¢ g0
m(tn)
...... ¢ ¢ ¢
...
gp)1 (tn) gp)2 (tn) ¢ ¢ ¢ gp)m(tn)
1
CCCCCCCCCCA
+
0
BBBBBBBBBB@
O(Hp+1) O(Hp+1) ¢ ¢ ¢ O(Hp+1)
O(Hp) O(Hp) ¢ ¢ ¢ O(Hp)
...... ¢ ¢ ¢
...
O(H) O(H) ¢ ¢ ¢ O(H)
1
CCCCCCCCCCA

53
donde Bp es la matriz cuadrada de orden (p+ 1)
Bp =
0
BBBBBBBBBBBBBB@
1 P1[hn+1] P2[hn+1] ¢ ¢ ¢ Pp[hn+1]
0 1 1!P2[hn+1; 0] ¢ ¢ ¢ 1!Pp[hn+1; 0]
0 0 1 ¢ ¢ ¢ 2!Pp[hn+1; 0;¡H1]
......
..... .
...
0 0 0 ¢ ¢ ¢ 1
1
CCCCCCCCCCCCCCA
(p+1)£(p+1)
D/.
Aplicando a cada uno de los campos componentes gi(t) con i = 1; :::; m de la
función de perturbación g(t) el (lema no 17) y el hecho de que Pj [H1; :::; Hi+1] es de
orden j ¡ i en H, se obtienen las siguientes igualdades:
gi[tn+1] = P0[hn+1]gi(tn) +P1[hn+1]g0
i(tn) + ¢ ¢ ¢
¢ ¢ ¢ + Pp[hn+1]gp)i (tn) + O(H
p+1)
gi[tn+1; tn] = P0[hn+1; 0]gi(tn) + P1[hn+1; 0]g0
i(tn) + ¢ ¢ ¢
¢ ¢ ¢ + Pp[hn+1; 0]gp)i (tn) + O(H
p)
...
gi[tn+1; :::; tn+1¡p] = P0[hn+1; 0;¡H1;:::;¡Hp¡1]gi(tn) +
+P1[hn+1; 0;¡H1;:::;¡Hp¡1]g0
i(tn) + ¢ ¢ ¢
¢ ¢ ¢ + Pp[hn+1; 0;¡H1;:::;¡Hp¡1]gp)i (tn) + O(H)
54
matricialmente0
BBBBBBBBBB@
g1[tn+1] g2[tn+1] ¢ ¢ ¢ gm[tn+1]
g1[tn+1; tn] g2[tn+1; tn] ¢ ¢ ¢ gm[tn+1; tn]
...... ¢ ¢ ¢
...
g1[tn+1; :::; tn+1¡p] g2[tn+1; :::; tn+1¡p] ¢ ¢ ¢ gm[tn+1; :::; tn+1¡p]
1
CCCCCCCCCCA
=
=
0
BBBBBBBBBB@
P0[hn+1] P1[hn+1] ¢ ¢ ¢ Pp[hn+1]
P0[hn+1; 0] P1[hn+1; 0] ¢ ¢ ¢ Pp[hn+1; 0]
...... ¢ ¢ ¢
...
P0[hn+1; 0; :::;¡Hp¡1] P1[hn+1; 0; :::;¡Hp¡1] ¢ ¢ ¢ Pp[hn+1; 0; :::;¡Hp¡1]
1
CCCCCCCCCCA
£
£
0
BBBBBBBBBB@
g1(tn) g2(tn) ¢ ¢ ¢ gm(tn)
g0
1(tn) g0
2(tn) ¢ ¢ ¢ g0
m(tn)
...... ¢ ¢ ¢
...
gp)1 (tn) gp)2 (tn) ¢ ¢ ¢ gp)m (tn)
1
CCCCCCCCCCA
+
0
BBBBBBBBBB@
O(Hp+1) O(Hp+1) ¢ ¢ ¢ O(Hp+1)
O(Hp) O(Hp) ¢ ¢ ¢ O(Hp)
...... ¢ ¢ ¢
...
O(H) O(H) ¢ ¢ ¢ O(H)
1
CCCCCCCCCCA
representando, simbólicamente el producto anterior, se obtiene la ecuación:
X(p+1)£m = Y(p+1)£(p+1) £ Z(p+1)£m + O(p+1)£m
pudiéndose escribir la matriz Y(p+1)£(p+1)en la forma:
Y(p+1)£(p+1) =
0
BBBBBBBBBBBBBB@
1 P1[hn+1] P2[hn+1] ¢ ¢ ¢ Pp[hn+1]
0 11!
P2[hn+1; 0] ¢ ¢ ¢ Pp[hn+1; 0]
0 0 12! ¢ ¢ ¢ Pp[hn+1; 0;¡H1]
......
.... . .
...
0 0 0 ¢ ¢ ¢ 1p!
1
CCCCCCCCCCCCCCA

55
Sustituyendo en la ecuación previa y efectuando las transformaciones elementales
pertinentes para eliminar los cocientes de factoriales, resulta:
Dtp;n+1 = Bp £ Z(p+1)£m + O(p+1)£m Ä
2.3.1 Estableciendo el método multipaso implícito
Truncando el desarrollo obtenido en (teorema no 25) y despejando Z(p+1)£m resulta:
Z(p+1)£m = B¡1p £ (Dt
p;n+1)(p+1)£m
reemplazando en xn+1 = G0(hn+1)xn + "p+1P
j=1
Gj(hn+1)gj¡1)(tn) las derivadas de los
campos componentes de la función de perturbación podemos escribir:
xn+1 = G0(hn+1)xn + "
p+1X
j=1
Gj(hn+1)pj
siendo pj con j = 1; :::; p + 1 la j-ésima columna de la matriz Z t. Al ser Z t =
Dp;n+1 £ B¡tp bastará tomar pj como la columna j-ésima de la matriz Dp;n+1 £B¡tp .
Designando por (dij)(p+1)£(p+1) = B¡tp resulta que la matriz Dp;n+1£B¡tp de orden
m£ (p +1), es igual a:
0
BBBBBBBBBBB@
p+1P
i=1
g1[tn+1; :::; tn+1¡(i¡1)]di1(i ¡ 1)! ¢ ¢ ¢p+1P
i=1
g1[tn+1; :::; tn+1¡(i¡1)]di(p+1)(i ¡ 1)!
p+1P
i=1
g2[tn+1; :::; tn+1¡(i¡1)]di1(i ¡ 1)! ¢ ¢ ¢p+1P
i=1
g2[tn+1; :::; tn+1¡(i¡1)]di(p+1)(i ¡ 1)!
... ¢ ¢ ¢...
p+1P
i=1
gm[tn+1; :::; tn+1¡(i¡1)]di1(i ¡ 1)! ¢ ¢ ¢p+1P
i=1
gm[tn+1; :::; tn+1¡(i¡1)]di(p+1)(i ¡ 1)!
1
CCCCCCCCCCCA

56
cuya j ¡ ¶esima columa pj es:
pj =
0
BBBBBBBBBBB@
p+1P
i=1
g1[tn+1; :::; tn+1¡(i¡1)]dij(i ¡ 1)!
p+1P
i=1g2[tn+1; :::; tn+1¡(i¡1)]dij(i ¡ 1)!
...
p+1P
i=1
gm[tn+1; :::; tn+1¡(i¡1)]dij(i ¡ 1)!
1
CCCCCCCCCCCA
que sustituída enp+1P
j=1
Gj(hn+1)pj permite escribir:
p+1X
j=1
Gj(hn+1)pj =
p+1X
j=1
Gj(hn+1)
0
BBBBBBBBBBB@
p+1P
i=1
g1[tn+1; :::; tn+1¡(i¡1)]dij(i ¡ 1)!
p+1P
i=1
g2[tn+1; :::; tn+1¡(i¡1)]dij(i ¡ 1)!
...
p+1P
i=1
gm[tn+1; :::; tn+1¡(i¡1)]dij(i ¡ 1)!
1
CCCCCCCCCCCA
=
=
p+1X
j=1
Gj(hn+1)
0
BBBBBBBBBB@
p+1X
i=1
(i ¡ 1)!dij
0
BBBBBBBBBB@
g1[tn+1; :::; tn+1¡(i¡1)]
g2[tn+1; :::; tn+1¡(i¡1)]
...
gm[tn+1; :::; tn+1¡(i¡1)]
1
CCCCCCCCCCA
1
CCCCCCCCCCA
=
=p+1X
j=1
0
BBBBBBBBBB@
p+1X
i=1
(i ¡ 1)!dijGj(hn+1)
0
BBBBBBBBBB@
g1[tn+1; :::; tn+1¡(i¡1)]
g2[tn+1; :::; tn+1¡(i¡1)]
...
gm[tn+1; :::; tn+1¡(i¡1)]
1
CCCCCCCCCCA
1
CCCCCCCCCCA
=

57
=p+1X
i=1
0
BBBBBBBBBB@
Ãp+1X
j=1
(i ¡ 1)!dijGj(hn+1)
!
0
BBBBBBBBBB@
g1[tn+1; :::; tn+1¡(i¡1)]
g2[tn+1; :::; tn+1¡(i¡1)]
...
gm[tn+1; :::; tn+1¡(i¡1)]
1
CCCCCCCCCCA
1
CCCCCCCCCCA
=
=
p+1X
i=1
¡i
0
BBBBBBBBBB@
g1[tn+1; :::; tn+1¡(i¡1)]
g2[tn+1; :::; tn+1¡(i¡1)]
...
gm[tn+1; :::; tn+1¡(i¡1)]
1
CCCCCCCCCCA
donde
¡i =
p+1X
j=1
(i ¡ 1)!dijGj(hn+1) con i = 1; :::; p+ 1
Sustituyendo esta última expresión en xn+1 = G0(hn+1)xn + "p+1P
j=1
Gj(hn+1)pj
conseguimos la fórmula siguiente, para un método multipaso implícito:
xn+1 = G0(hn+1)xn + "p+1X
j=1
¡i
0
BBBBBBBBBB@
g1[tn+1; :::; tn+1¡(i¡1)]
g2[tn+1; :::; tn+1¡(i¡1)]
...
gm[tn+1; :::; tn+1¡(i¡1)]
1
CCCCCCCCCCA
De…nition 26 Introducimos la siguiente notación:
²xn es la aproximación al valor de la solución en tn.
²¡i =p+1P
j=1
(i ¡ 1)!dijGj(hn+1) donde (dij)(p+1)£(p+1) = B¡tp
²T tn;i =
µ
g1[tn+1; :::; tn+1¡(i¡1) ]; ¢ ¢ ¢ ; gm[tn+1; :::; tn+1¡(i¡1)]
¶
²Inicialización para x: x0, x1, x2, x3, ... ,xp¡1.

58
De…nition 27 El método implícito, con tamaño de paso variable, de p pasos E.I.pI,
para sistemas lineales perturbados, se formula, mediante la ecuación:
xn+1 = G0(hn+1)xn + "
p+1X
i=1
¡iTn;i con n ¸ p ¡ 1
Daremos algunos resultados referentes a los métodos E.I.pI para sistemas lineales
perturbados, de los que no haremos las demostraciones por ser análogas a las del
método E.I.pE.
Proposition 28 El método implícito, con tamaño de paso variable, de p pasos E.I.pI
para sistemas lineales perturbados, es de orden p+1 y " siempre es factor común del
error de truncación en cada paso.
Corollary 29 Si " = 0 el método E.I.pI para sistemas lineales perturbados es exacto.
Proposition 30 El método explícito, de p pasos, E.I.pI, es consistente de orden p+1.
2.4 Método predictor corrector E.I.pPC para sis-
temas lineales perturbados
De…nition 31 De…nimos el método predictor-corrector, con tamaño de paso varia-
ble, de p pasos E.I.pPC para sistemas lineales perturbados como el que tiene como
predictor a E.I.pE y como corrector a E.I.pI.
El método predictor corrector empleado, es del tipo P (EC)¹E1¡t con t = 1 y ¹
entero positivo, es decir un predictor y ¹ veces evaluador-corrector, P (EC)¹ [50]. Al

59
aplicar el P (EC )¹ para obtener corrección de convergencia, se observa que si x[j]n es
la j-ésima corrección de xn y ¹ = 2, entonces°°°x
[2]n ¡ x [1]n
°°° es su…cientemente pequeño
y el cálculo de x[2]n incrementa signi…cativamente el coste computacional.
Además si ¹ = 1; P (EC) tiene el mismo orden que el corrector, pero los errores
de truncación son distintos.

60

Capítulo 3
Implementación de los métodos
multipaso variable para la
integración de sistemas lineales
perturbados
3.1 Introducción
En el capítulo anterior se han expuesto los métodos E.I.pE, E.I.pI y E.I.pPC, para la
integración de sistemas lineales perturbados. Estos métodos presentan la di…cultad
de que sus coe…cientes matriciales no están expresados de manera recurrente, lo que
di…culta, su codi…cación para automatizar su cálculo. En este capítulo resolveremos
este problema, lo que nos permitirá codi…car los métodos, pudiendo escoger el tamaño
61

62
del paso y el número de pasos, que requiera cada ejecución.
Para el método E.I.pE tendríamos que poder calcular de manera recurrente los
coe…cientes
¤i =
pX
j=1
(i ¡ 1)!dijGj(hn+1) con i = 1; :::; p
donde la matriz (dij)p£p = A¡tp . Y para el método E.I.pI tendríamos que poder
calcular de forma recurrente los coe…cientes
¡i =p+1X
j=1
(i ¡ 1)!dijGj(hn+1) con i = 1; :::; p+ 1
donde la matriz (dij)(p+1)£(p+1) = B¡tp . Luego el problema se reduce a encontrar una
fórmula recurrente, que nos permita calcular los elementos de las matrices A¡tp y B¡tp .
El problema del cálculo recurrente de las matrices A¡tp y B¡tp no lo abordaremos
directamente, sino que obtendremos unas matrices, que denotaremos por Sn;p y Sn;p+1
respectivamente, sobre las que de…niremos las recurrencias y posteriormente las re-
lacionaremos con las matrices A¡tp y B¡tp . El cálculo de las matrices Sp;n y Sp;n+1 se
fundamentará en el estudio y aplicación de los polinomios simétricos y sus relaciones
con las diferencias divididas.
Una vez conseguidas las relaciones de recurrencia, para las matrices Sp;n y Sp;n+1 y
su conexión con las matrices A¡tp y B¡tp , procederemos a rede…nir los métodos E.I.pE,
E.I.pI y E.I.pPC, de manera que sea posible una implementación efectiva para su
cálculo automático.
En este capítulo, también se expondrán los códigos de los nuevos algoritmos, im-
plementados en MAPLE V Release 4, así como una introducción a los problemas sti¤
[43],[50],[64]. Por último resolveremos varios ejemplos, mediante los códigos E.I.pE,

63
E.I.pI y E.I.pPC y los compararemos con otros métodos conocidos.
3.2 Polinomios Simétricos
El propósito de esta sección es proporcionar una notación y terminología que será
empleada a continuación, y exponer algunos resultados importantes de las funciones
simétricas [4],[8],[46],[52],[54].
Consideremos un anillo K[X; Y ]. A todo polinomio P (X; Y ) hacemos correspon-
der el polinomio P0obtenido escribiendo Y en lugar de X y X en lugar de Y , dicho
de otra manera P0(X; Y ) = P (Y; X). Evidentemente, (P
0)0= P . La correspondencia
P $ P0es un automor…smo del anillo K[X; Y ], ya que P $ P
0y Q $ Q
0implican
de manera mani…esta
(P + Q)0
$ P0+ Q
0
(PQ)0
$ P0
Q0
En general, en K [X1; X2; :::; Xn] consideremos una permutacion ¾ hecha sobre las
letras X1; X2; :::; Xn y sea ¾(Xi) = X0
i . La correspondencia
P (X1; X2; :::; Xn)$ P0= P (X
0
1; X0
2; :::; X0
n)
es un automor…smo, porque es compatible con la igualdad, la suma y el producto en
el anillo K[X1; X2; :::; Xn].
De…nition 32 Los polinomios invariantes respecto al conjunto de los automor…smos
anteriormente de…nidos se llaman simétricos.

64
Ya que una permutación cualquiera es un producto de trasposiciones, bastaría
comprobar su invarianza en todas las trasposiciones posibles, para asegurarse que es
un polinomio simétrico.
Sea el monomio x®1x¯2 ¢ ¢ ¢ x¸n en el que los enteros ®; ¯; :::; ¸ pueden ser nulos. Efec-
tuando en él todas las permutaciones sobre las variables x1x2 ¢ ¢ ¢ xn se obtiene varios
monomios distintos cuya suma es evidentemente un polinomio simétrico denotado por
Xx®1x
¯2 ¢ ¢ ¢ x¸n
así p. ej., el polinomio simétrico en n variables P = x31 + x32 + ¢ ¢ ¢ + x3n se escribe
Px31x
02 ¢ ¢ ¢ x0n siendo el número de términos distintos n!
(n¡1)! = n ya que las sustitucio-
nes sobre las n ¡ 1 últimas letras proporcionan el mismo monomio [52].
Consideremos el anillo de los polinomios simétricos en n variables independientes
t1; :::; tn:
De…nition 33 Para cada 0 5 r 5 n, la r-ésima función simétrica elemental en;r es
la suma de todos los productos de r variables distintas ti, siendo
en;0 = 1
en;r =nX
i1<i2<¢¢¢<ir
ti1 ¢ ¢ ¢ tir
p. ej. para tres variables, t1; t2; t3 tenemos: e30 = 1, e3;1 = t1 + t2 + t3, e3;2 =
t1t2+ t1t3 + t2t3, e3;3 = t1t2t3.
En el caso de que r < 0 se de…ne
en;r = 0

65
La función generatriz de en;r es:
En(t) =nX
r=0
en;r ¢ tr =nY
i=1
(1 + tit)
es decir, efectuando un desarrollo de Mac Laurin de la función En(t) =nQ
i=1
(1 + tit)
hasta orden n, sus coe…cientes serían las funciones simétricas elementales en;r.
De…nition 34 Sea ¸ = (¸1 ¢ ¢ ¢ ¸n) 2 Nn , j¸j = ¸1 + ¢ ¢ ¢ + ¸n. Para cada r = 0 la r-
ésima función simétrica completa hn;r se de…ne como la suma de todos los monomios
de grado total r en las variables t1; :::; tn, es decir
hn;r =X
j¸j=r
X
S¸
t®
donde S¸ = f todas las distintas permutaciones ® = (®1 ¢ ¢ ¢ ®n) de ¸g y t® = t®11 :::t®nn. .
En particular hn;0 = 1 y hn;1 = en;1. [89]
p. ej. para tres variables, t1; t2; t3 tenemos:
h30 = 1
h3;1 = e3;1 = t1 + t2 + t3
h3;2 = t21 + t22 + t
23 + t1t2 + t1t3+ t2t3
h3;3 = t31 + t32 + t
33 + t
21t2 + t
21t3+ t
22t1 + t1t
22 + t1t
23 + t2t
23 + t1t2t3
En el caso de que r < 0 se de…ne
hn;r = 0
La función generatriz de hn;r es:
Hn(t) =nX
r=0
hn;r ¢ tr =nY
i=1
(1¡ tit)¡1

66
es decir, efectuando un desarrollo de Mac Laurin de la función Hn(t) =nQ
i=1(1 + tit)¡1
hasta orden n, sus coe…cientes serían las funciones simétricas completas hn;r [54].
Proposition 35 Entre los polinomios simétricos elementales y los completos se es-
tablece al siguiente relación
nX
r=0
(¡1)r ¢ hn;®¡r ¢ em;r = 0 8m = n = 1 y ® > m¡ n
D/.
De En(t) =nQ
i=1(1 + tit) y de Hn(t) =
nQ
i=1(1¡ tit)¡1 se tiene
Hn(t)Em(¡t) =nY
i=1
(1 ¡ tit)¡1
mY
i=1
(1 + ti(¡t)) =mY
i=n+1
(1 ¡ tit)
llamando j = i ¡ n tenemos
mY
i=n+1
(1 ¡ tit) =m¡nY
j=1
(1¡ tit) = Em¡n(¡t)
y de aquí se sigue que los coe…cientes de t® para ® > m¡ n son cero, lo que equivale
a:nX
r=0
(¡1)r ¢ hn;®¡r ¢ em;r = 0 8m = n = 1 y ® > m ¡ n Ä
Denotaremos por g [t0; t1; :::; tk] la diferencia dividida de orden k de una función g
en los valores t0; t1; :::; tk. [89]
Proposition 36 Las diferencias divididas son funciones simétricas de sus argumen-
tos.
D/.

67
Por de…nición
g[t; t1] =g(t)¡ g(t1)
t¡ t1=
g(t)
t¡ t1+g(t1)
t1 ¡ t
y obtenemos sin di…cultad
g [t; t1; t2] =g(t)
(t ¡ t1)(t¡ t2)+
g(t1)
(t1 ¡ t)(t1 ¡ t2)+
g(t2)
(t2 ¡ t)(t2 ¡ t1)
probándose por inducción que
g[t; t1;:::; tn] =g(t)
(t¡ t1)(t¡ t2) ¢ ¢ ¢ (t¡ tn)+
g(t1)
(t1 ¡ t)(t1 ¡ t2) ¢ ¢ ¢ (t1 ¡ tn)+ ¢ ¢ ¢
¢ ¢ ¢ +g(tn)
(tn ¡ t)(tn ¡ t1) ¢ ¢ ¢ (tn ¡ tn¡1)
evidentemente si intercambiamos dos argumentos cualesquiera no se altera el valor de
la diferencia dividida, por tanto éstas son funciones simétricas de sus argumentos.
Proposition 37 La diferencia dividida de la función g(t) = tm se puede obtener
mediante la siguiente expresión
g[t1; t2; :::; tn] =
nX
i=1
0 tmi(ti ¡ t1)(ti ¡ t2) ¢ ¢ ¢ (ti ¡ tn)
donde la notaciónP0
indica que el factor ti ¡ ti está excluído para i = 1; 2; :::; n .
D/.
Esto último es el coe…ciente de tm¡n+1 en el desarrollo de la función
nX
i=1
tn¡1i
(ti ¡ t1) ¢ ¢ ¢ (ti ¡ ti¡1)(1¡ tit)(ti ¡ ti+1) ¢ ¢ ¢ (ti ¡ tp+1)
esta expresión es el resultado de introducir en las fracciones parciales la función
(1 ¡ t1t)¡1(1 ¡ t2t)
¡1 ¢ ¢ ¢ (1 ¡ tnt)¡1

68
y por consiguiente [60] el coe…ciente de tm¡n+1 es la suma de los productos homogéneos
de grado m¡ n + 1 de t1; :::; tn.
Entonces
g[t1; t2; :::; tn] =X
t®11 t®22 ¢ ¢ ¢ t®nn
donde el sumatorio se extiende a todos los enteros positivos, incluído el cero, que
satisfacen la relación:
®1+®2+¢¢¢+®n = m¡ n +1: Ä
Entre las diferencias divididas de g(t) = tm que denotaremos por tm[t1; :::; tn] y
los polinomios simétricos completos podemos establecer la siguiente relación:
Corollary 38 tm[t1; :::; tn] = hn;m¡n+1
D/.
Trivial, por la de…nición de hn;r y por la proposición anterior.Ä
Finalmente veremos la relación existente entre las diferencias divididas y los poli-
nomios simétricos elementales.
De…nition 39 Sea:
qi;j = tj¡1[t1; :::; ti] = hi;j¡i
y
¾i;j = (¡1)j¡iej¡1;j¡i
De…nition 40 Sean las matrices cuadradas de orden n: P = (qi;j) y S = (¾i;j)
Proposition 41 Las matrices P y S son triangulares superiores, con unos en la
diagonal principal. Además las matrices P y S son inversas.

69
D/.
Dado que hn;r = en;r = 0, para r < 0 y hn;0 = en;0 = 1 evidentemente son
triangulares superiores, con unos en su diagonal principal. Como jP j = jSj = 1 6= 0
son inversibles, bastaría con demostrar que PS = I. Las relaciones expresadas en
(de…nición no33, de…nición no34 y proposición no35), muestran que PS = I.
3.3 Cálculo recurrente de las matrices A¡tp y B¡t
p .
Sea t¤ 2 [a; b], consideramos la función simétrica completa qi;j en los valores
Hn¡k = tn¡k ¡ t¤ con k = 0; :::; i ¡ 1
Es importante precisar que trabajamos en el punto tn y denotaremos
qi;j(n) = tj¡1[Hn; :::;Hn¡(i¡1)]
La función ¾i;j en los mismos puntos se denotará por ¾i;j(n).
Por (proposición no41) las matrices cuadradas de orden k; Pk;n = (qi;j(n)) y Sk;n =
(¾i;j(n)) son inversas una de otra.
Como
Hn¡j = tn¡j ¡ t¤
y
Hj = tn ¡ tn¡j
se veri…ca que
(tn ¡ t¤) ¡ Hj = Hn¡j con j = 0; :::; i ¡ 1
Particularizando al caso: t¤ = tn tendríamos Hn¡j = ¡Hj con j = 0; :::; i ¡ 1

70
3.3.1 Cálculo recurrente de A¡tp .
El siguiente lema nos permite aproximar la diferencia dividida de orden k de la fun-
ción g(t) por sus derivadas; para simpli…car la exposición, consideramos que g(t) es
analítica.
Lemma 42 Las diferencias divididas de una función g satisfacen la siguiente pro-
piedad
g[tn; tn¡1; :::; tn¡(i¡1)] =1X
j=0
qi;j+1(n)1
j!gj)(t¤)
D/.
La demostración es realmente sencilla, si reemplazamos los desarrollos en t¤ de
g(tn); :::; g(tn¡i+1) por una adecuada expresión de diferencias …nitas.
g[tn; tn¡1; :::; tn¡(i¡1)] =1X
j=0
tj [tn ¡ t¤; :::; tn¡(i¡1) ¡ t¤]
j!gj)(t¤) =
=1X
j=0
qi;j+1(n)1
j !gj)(t¤) Ä
Si H = max©
jHnj ; :::;¯¯Hn¡(i¡1)
¯¯ª, como las qi;j(n) tienen orden j¡ i en H el (lema
no42), nos permite escribir:
g[tn; tn¡1; :::; tn¡(i¡1)] =
p¡1X
j=0
qi;j+1(n)1
j !g j)(t¤) + O(Hp¡(i¡1))
con i = 1; :::; p.

71
Considerando t¤ = tn y expresando matricialmente estas igualdades, tenemos
0
BBBBBBBBBB@
g[tn]
g[tn; tn¡1]
...
g[tn;:::; tn¡(p¡1)]
1
CCCCCCCCCCA
=
0
BBBBBBBBBB@
q1;1(n) ¢ ¢ ¢ q1;p(n)
q2;1(n) ¢ ¢ ¢ q2;p(n)
.... . .
...
qp;1(n) ¢ ¢ ¢ qp;p(n)
1
CCCCCCCCCCA
0
BBBBBBBBBB@
g(tn)
g0(tn)1!
...
g(p¡1)(tn)(p¡1)!
1
CCCCCCCCCCA
+
0
BBBBBBBBBB@
O(Hp)
O(Hp¡1)
...
O(H)
1
CCCCCCCCCCA
y como qi;j+1(n) = hi;j en los argumentos Hn; :::;Hn¡(i¡1), podemos escribir
0
BBBBBBBBBB@
g[tn]
g[tn; tn¡1]
...
g[tn;:::; tn¡(p¡1)]
1
CCCCCCCCCCA
=
0
BBBBBBBBBB@
1 h1;1 ¢ ¢ ¢ h1;p¡1
0 1 ¢ ¢ ¢ h2;p¡2
......
. . ....
0 0 ¢ ¢ ¢ 1
1
CCCCCCCCCCA
0
BBBBBBBBBB@
g(tn)
g0(tn)1!
...
g(p¡1)(tn)(p¡1)!
1
CCCCCCCCCCA
+
0
BBBBBBBBBB@
O(Hp)
O(Hp¡1)
...
O(H)
1
CCCCCCCCCCA
La siguiente proposición nos permite el cálculo recurrente de la matriz Sp;n.
Proposition 43
¾i;j(n) = ¾i¡1;j¡1(n) ¡ Hn¡j+2¾i;j¡1(n)
con i; j = 2.
D/.
Es inmediata. [89]Ä
72
Si consideramos t¤ = tn, entonces:
Sp;n =
0
BBBBBBBBBBBBBBBBBBBBBBBBBB@
1 0 0 0 0 0
0 1 ! ¾2;3(n) ! ¾2;4(n) ! ¾2;5(n) ¢ ¢ ¢ ! ¾2;p(n)
& & &
0 0 1 ¾3;4(n) ! ¾3;5(n) ¢ ¢ ¢ ! ¾3;p(n)
& &
0 0 0 1 ! ¾4;5(n) ¢ ¢ ¢ ! ¾4;p(n)
......
......
.... . .
...
0 0 0 0 1
1
CCCCCCCCCCCCCCCCCCCCCCCCCCA
El siguiente teorema nos permite obtener de forma recurrente la matriz A¡tp de…-
nida en el capítulo dos.
Theorem 44
A¡tp = Mp;n £ S tp;n £ Np;n
donde
Mp;n =
0
BBBBBBBBBB@
10!
11!
. ..
1(p¡1)!
1
CCCCCCCCCCA
y
Np;n =
0
BBBBBBBBBB@
0!
1!
. ..
(p¡ 1)!
1
CCCCCCCCCCA

73
D/.
Como t¤ = tn y qi;j+1(n) = tj [0;¡H1; :::;¡Hi¡1] = j!Pj [0;¡H1; :::;¡Hi¡1], resulta
Pp;n =
0
BBBBBBBBBB@
0!P0[0] ¢ ¢ ¢ (p ¡ 1)!Pp¡1[0]
0!P0[0;¡H1] ¢ ¢ ¢ (p ¡ 1)!Pp¡1[0;¡H1]
......
0!P0[0;¡H1; :::;¡Hp¡1] ¢ ¢ ¢ (p ¡ 1)!Pp¡1[0;¡H1; :::;¡Hp¡1]
1
CCCCCCCCCCA
efectuando el producto Np;n £ Pp;n £ Mp;n se obtiene la matriz Ap. Trasponiendo e
invirtiendo el producto anterior se consigue:
A¡tp = Mp;n £ P¡tp;n £ Np;n = Mp;n £ S tp;n £ Np;n =
µ(j ¡ 1)!¾j;i(n)
(i ¡ 1)!
¶
Ä
La expresión precedente, permite obtener la matriz A¡tp por recurrencia, a partir
de la matriz Stp;n; tal y como se indicaba en la introducción al capítulo. Basándonos en
esta recurrencia, se podrían calcular, directamente, relaciones recurrentes análogas,
para los elementos di;j de la matriz A¡tp , en efecto:
Como
¾i;j =(j ¡ 1)!
(i ¡ 1)!dj;i
despejando di;j según los casos y sutituyendo en la relación propuesta en (proposición
no43), tenemos
d1;1 = 1
d1;j = 0 con j = 2; :::; p
di;1 = 0 con i = 2; :::; p
di;j =j ¡ 1
i ¡ 1di¡1;j¡1 ¡
1
i¡ 1di¡1;jHn¡i+2 con 2 · i; j · p

74
3.3.2 Cálculo recurrente de B¡tp .
Lemma 45 Sea hn+1 = tn+1¡t¤.Las diferencias divididas de una función g satisfacen
la siguiente propiedad
g[tn+1; tn; :::; tn¡(i¡1)] =1X
j=0
qi+1;j+1(n)1
j !gj)(t¤)
D/.
La demostración es realmente sencilla, si reemplazamos los desarrollos en t¤ de
g(tn+1); :::; g(tn¡i+1) en una adecuada expresión de diferencias …nitas.
g[tn+1; tn; :::; tn¡(i¡1)] =1X
j=0
tj [tn+1 ¡ t¤; :::; tn¡(i¡1) ¡ t¤]
j!g j)(t¤) =
=1X
j=0
qi+1;j+1(n)1
j !gj)(t¤) Ä
Si H = max©jhn+1j ; jHnj ; :::;
¯¯Hn¡(i¡1)
¯¯ª, como las qi;j(n) tienen orden j ¡ i en H
el (lema no45), nos permite escribir:
g[tn+1; tn; :::; tn¡(i¡1)] =p¡1X
j=0
qi+1;j+1(n)1
j !gj)(t¤) +O(Hp¡(i¡1))
con i = 1; :::; p.
Considerando t¤ = tn y expresando matricialmente estas igualdades, tenemos
0
BBBBBBBBBB@
g[tn+1]
g[tn+1; tn]
...
g[tn+1;:::; tn¡(p¡1) ]
1
CCCCCCCCCCA
=
0
BBBBBBBBBB@
q1;1(n) ¢ ¢ ¢ q1;p+1(n)
q2;1(n) ¢ ¢ ¢ q2;p+1(n)
.... . .
...
qp+1;1(n) ¢ ¢ ¢ qp+1;p+1(n)
1
CCCCCCCCCCA
0
BBBBBBBBBB@
g(tn)
g0(tn)1!
...
gp)(tn)p!
1
CCCCCCCCCCA
+
0
BBBBBBBBBB@
O(Hp+1)
O(Hp)
...
O(H)
1
CCCCCCCCCCA

75
y como qi+1;j+1(n) = hi+1;j¡i en los argumentos hn+1;Hn; :::;Hn¡(i¡1), podemos escri-
bir0
BBBBBBBBBB@
g[tn+1]
g[tn+1; tn]
...
g[tn+1;:::; tn¡(p¡1) ]
1
CCCCCCCCCCA
=
0
BBBBBBBBBB@
1 h1;1 ¢ ¢ ¢ h1;p+1
0 1 ¢ ¢ ¢ h2;p+1
......
. . ....
0 0 ¢ ¢ ¢ 1
1
CCCCCCCCCCA
0
BBBBBBBBBB@
g(tn)
g0(tn)1!
...
gp)(tn)p!
1
CCCCCCCCCCA
+
0
BBBBBBBBBB@
O(Hp+1)
O(Hp)
...
O(H)
1
CCCCCCCCCCA
La siguiente proposición nos permite el cálculo recurrente de la matriz Sp;n+1.
Proposition 46
¾i;j(n) = ¾i¡1;j¡1(n) ¡ Hn¡j+3¾i;j¡1(n)
con i; j = 2.
D/.
Análoga a la proposición no 43, [89] Ä
Si consideramos t¤ = tn, entonces:
Sp;n+1 =
0
BBBBBBBBBBBBBBBBBBBBBBBBBB@
1 ¡hn+1 0 0 0 0
0 1 ! ¾2;3(n) ! ¾2;4(n) ! ¾2;5(n) ¢ ¢ ¢ ! ¾2;p+1(n)
& & &
0 0 1 ¾3;4(n) ! ¾3;5(n) ¢ ¢ ¢ ! ¾3;p+1(n)
& &
0 0 0 1 ! ¾4;5(n) ¢ ¢ ¢ ! ¾4;p+1(n)
......
......
.... . .
...
0 0 0 0 1
1
CCCCCCCCCCCCCCCCCCCCCCCCCCA
El siguiente teorema nos permite obtener de forma recurrente la matriz B¡tp de…-
nida en el capítulo dos.

76
Theorem 47
B¡tp =Mp;n+1 £ Stp;n+1 £ Np;n+1
donde
Mp;n+1 =
0
BBBBBBBBBB@
10!
11!
. ..
1p!
1
CCCCCCCCCCA
y
Np;n+1 =
0
BBBBBBBBBB@
0!
1!
.. .
p!
1
CCCCCCCCCCA
D/.
Como tn = t¤ y qi+1;j+1(n) = tj [hn+1; 0;¡H1; :::;¡Hi¡1] = j!Pj[hn+1; 0;¡H1; :::;¡Hi¡1],
resulta
Pp;n+1 =
0
BBBBBBBBBB@
0!P0[hn+1] ¢ ¢ ¢ p!Pp¡1[hn+1]
0!P0[hn+1; 0] ¢ ¢ ¢ p!Pp¡1[hn+1; 0]
......
0!P0[hn+1; 0; :::;¡Hp¡1] ¢ ¢ ¢ p!Pp¡1[hn+1; 0; :::;¡Hp¡1]
1
CCCCCCCCCCA
efectuando el producto Np;n+1 £ Pp;n+1 £Mp;n+1 resulta la matriz Bp. Trasponiendo
e invirtiendo el producto anterior obtenemos
B¡tp =Mp;n+1£ P¡tp;n+1£ Np;n+1 = Mp;n+1£ Stp;n+1 £Np;n+1 =
µ(j ¡ 1)!¾j;i(n)
(i ¡ 1)!
¶
Ä

77
La expresión anterior, permite obtener la matriz B¡tp por recurrencia, a partir de
la matriz S tp;n+1; tal y como se indicaba en la introducción al capítulo. Basándonos en
esta recurrencia, se podrían obtener, directamente, relaciones recurrentes análogas,
para los elementos di;j de la matriz B¡tp , en efecto:
Como
¾i;j =(j ¡ 1)!
(i ¡ 1)!dj;i
despejando di;j según los casos y sutituyendo en la relación propuesta en (proposición
no46), tenemos
d1;1 = 1
d1;j = 0 con j = 2; :::; p+ 1
d2;1 = ¡hn+1
di;1 = 0 con i = 3; :::; p + 1
di;j =j ¡ 1
i ¡ 1di¡1;j¡1 ¡
1
i ¡ 1di¡1;jHn¡i+3 con 2 · i; j · p+ 1
3.4 Rede…nición de los métodos: E.I.pE, E.I.pI y
E.I.pPC
3.4.1 Método E.I.pE
En el capítulo dos, se de…nió el método E.I.pE, de paso variable, mediante la expresión:
xn+1 = G0(hn+1)xn + "pX
j=1
Gj(hn+1)pj
siendo pj con j = 1; :::; p la j-ésima columna de la matriz Z t. Es decir:

78
pj =
0
BBBBBBBBBBB@
pP
i=1g1[tn; :::; tn¡(i¡1)]dij(i ¡ 1)!
pP
i=1g2[tn; :::; tn¡(i¡1)]dij(i ¡ 1)!
...
pP
i=1gm[tn; :::; tn¡(i¡1)]dij(i ¡ 1)!
1
CCCCCCCCCCCA
Basándonos en la relación:
A¡tp =
µ(j ¡ 1)!¾j;i(n)
(i ¡ 1)!
¶
se obtiene:
pj =
0
BBBBBBBBBBB@
pP
i=1
g1[tn; :::; tn¡(i¡1)](j ¡ 1)!¾j;i(n)
pP
i=1g2[tn; :::; tn¡(i¡1)](j ¡ 1)!¾j;i(n)
...
pP
i=1
gm[tn; :::; tn¡(i¡1)](j ¡ 1)!¾j;i(n)
1
CCCCCCCCCCCA
= (j¡1)!
0
BBBBBBBBBBB@
pP
i=1
g1[tn; :::; tn¡(i¡1)]¾j;i(n)
pP
i=1g2[tn; :::; tn¡(i¡1)]¾j;i(n)
...
pP
i=1
gm[tn; :::; tn¡(i¡1)]¾j;i(n)
1
CCCCCCCCCCCA
De…nition 48 Introducimos la siguiente notación:
²xnes la aproximación al valor de la solución en tn.
²¤i =pP
j=1(j ¡ 1)!¾j;i(n)Gj(hn+1)
²F tn;i =
µ
g1[tn; :::; tn¡(i¡1)]; ¢ ¢ ¢ ; gm[tn; :::; tn¡(i¡1)]
¶
²Inicialización para x: x0, x1, x2, x3, ... ,xp¡1.
Podemos proponer una nueva de…nición del método E.I.pE.
De…nition 49 El método explícito de p pasos E.I.pE, para sistemas lineales pertur-
bados se formula,mediante la ecuación:
xn+1 = G0(hn+1)xn + "pX
i=1
¤iFn;i con n ¸ p¡ 1

79
Métodos E.I.pE, de orden bajo.
² Orden 1:
xn+1 = G0(hn+1)xn + "
0
BBBBBB@
G1(hn+1)
0
BBBBBB@
g1(tn)
...
gm(tn)
1
CCCCCCA
+ G2(hn+1)
0
BBBBBB@
g1 [tn; tn¡1]
...
gm [tn; tn¡1]
1
CCCCCCA
1
CCCCCCA
² Orden 2:
xn+1 = G0(hn+1)xn + "
0
BBBBBB@
G1(hn+1)
0
BBBBBB@
g1(tn)
...
gm(tn)
1
CCCCCCA
+
+G2(hn+1)
0
BBBBBB@
g1 [tn; tn¡1] + hng1 [tn; tn¡1; tn¡2]
...
gm [tn; tn¡1] + hngm [tn; tn¡1; tn¡2]
1
CCCCCCA
+
+ 2G3(hn+1)
0
BBBBBB@
g1 [tn; tn¡1; tn¡2]
...
gm [tn; tn¡1; tn¡2]
1
CCCCCCA
1
CCCCCCA
3.4.2 Método E.I.pI
En el capítulo dos, se de…nió el método E.I.pI, mediante la expresión:
xn+1 = G0(hn+1)xn + "p+1X
j=1
Gj(hn+1)pj

80
siendo pj con j = 1; :::; p+ 1 la j-ésima columna de la matriz Z t = Dp;n+1£ B¡tp .
pj =
0
BBBBBBBBBBB@
p+1P
i=1
g1[tn+1; :::; tn+1¡(i¡1)]dij(i ¡ 1)!
p+1P
i=1
g2[tn+1; :::; tn+1¡(i¡1)]dij(i ¡ 1)!
...
p+1P
i=1
gm[tn+1; :::; tn+1¡(i¡1)]dij(i ¡ 1)!
1
CCCCCCCCCCCA
Como
B¡tp =
µ(j ¡ 1)!¾j;i(n)
(i ¡ 1)!
¶
se tiene:
pj =
0
BBBBBBBBBBB@
p+1P
i=1
g1[tn+1; :::; tn+1¡(i¡1)](j ¡ 1)!¾j;i(n)
p+1P
i=1
g2[tn+1; :::; tn+1¡(i¡1)](j ¡ 1)!¾j;i(n)
...
p+1P
i=1
gm[tn+1; :::; tn+1¡(i¡1)](j ¡ 1)!¾j;i(n)
1
CCCCCCCCCCCA
=
= (j ¡ 1)!
0
BBBBBBBBBBB@
p+1P
i=1g1[tn+1; :::; tn+1¡(i¡1)]¾j;i(n)
p+1P
i=1
g2[tn+1; :::; tn+1¡(i¡1)]¾j;i(n)
...
p+1P
i=1gm[tn+1; :::; tn+1¡(i¡1)]¾j;i(n)
1
CCCCCCCCCCCA
dando lugar a una nueva de…nición del método E.I.pI.
De…nition 50 Introducimos la siguiente notación:
²xn es la aproximación al valor de la solución en tn.
²¡i =p+1P
j=1
(j ¡ 1)!¾j;i(n)Gj(hn+1)

81
²T tn;i =
µ
g1[tn+1; :::; tn+1¡(i¡1) ]; ¢ ¢ ¢ ; gm[tn+1; :::; tn+1¡(i¡1)]
¶
²Inicialización para x: x0, x1, x2, x3, ... ,xp¡1.
De…nition 51 Se de…ne el método implícito de p pasos E.I.pI, para sistemas lineales
perturbados mediante la ecuación:
xn+1 = G0(hn+1)xn + "
p+1X
i=1
¡iTn;i con n ¸ p ¡ 1
Métodos E.I.pI, de orden bajo.
² Orden 1:
xn+1 = G0(hn+1)xn + "
0
BBBBBB@
G1(hn+1)
0
BBBBBB@
g1(tn+1) ¡ hn+1g1 [tn+1; tn]
...
gm(tn+1) ¡ hn+1gm [tn+1; tn]
1
CCCCCCA
+
+G2(hn+1)
0
BBBBBB@
g1 [tn+1; tn]
...
gm [tn+1; tn]
1
CCCCCCA
1
CCCCCCA
² Orden 2:
xn+1 = G0(hn+1)xn + "
0
BBBBBB@
G1(hn+1)
0
BBBBBB@
g1(tn+1) ¡ hn+1g1 [tn+1; tn]
...
gm(tn+1) ¡ hn+1gm [tn+1; tn]
1
CCCCCCA
+
+G2(hn+1)
0
BBBBBB@
g1 [tn+1; tn]¡ hn+1g1 [tn+1; tn; tn¡1]
...
gm [tn+1; tn]¡ hn+1gm [tn+1; tn; tn¡1]
1
CCCCCCA
+

82
+ 2G3(hn+1)
0
BBBBBB@
g1 [tn+1; tn; tn¡1]
...
gm [tn+1; tn; tn¡1]
1
CCCCCCA
1
CCCCCCA
3.4.3 Método E.I.pPC
De…nition 52 De…nimos el nuevo método predictor-corrector de p pasos E.I.pPC pa-
ra sistemas lineales perturbados como el que tiene como predictor a E.I.pE (de…nición
no49)y como corrector a E.I.pI(de…nición no51).
3.5 Códigos para los métodos: E.I.pE y E.I.pPC
3.5.1 Código para E.I.pE
Las variables de entrada son:
Número de ecuaciones del sistema: q
Número de pasos del método: p
Número de iteraciones: n
Tamaño de paso: h
Matriz del sistema: A
Ecuaciones del sistema: sys
Condiciones iniciales: init
Componentes de la función de perturbación: f.k con k: 1, ... ,q
Para el cálculo de las G-funciones de Scheifele se utilizan los algoritmos descritos
en el capítulo 1, cuyos códigos …guran en los anexos.

83
Se implementa la matriz recurrente A¡tp , mediante las fórmulas descritas en la
sección: ”Cálculo recurrente de las matrices A¡tp y B¡tp .” , de este capítulo.
Como inicializador del código, se ha utilizado el LSODE[adamsfunc] de Maple V.
Se obtiene la tabla de diferencias divididas, en los i primeros puntos con i =
0; :::; p¡ 1.
Por (de…nición no 49), calculamos la aproximación xp, que permite escribir la
siguiente línea de la tabla de diferencias divididas y obtener la aproximación xp+1:
Ver Anexo V.
3.5.2 Código para E.I.pPC
Las variables de entrada son:
Número de ecuaciones del sistema: q
Número de pasos del método: p
Número de iteraciones: n
Tamaño de paso: h
Matriz del sistema: A
Ecuaciones del sistema: sys
Condiciones iniciales: init
Componentes de la función de perturbación: f.k con k: 1, ... ,q
Para el cálculo de las G-funciones de Scheifele se utilizan los algoritmos descritos
en el capítulo 1, cuyos códigos …guran en los anexos.
Se implementan las matrices recurrentes A¡tp y B¡tp , mediante las fórmulas descri-

84
tas en la sección: ”Cálculo recurrente de las matrices A¡tp y B¡tp .” , de este capítulo.
Como inicializador del código, se ha utilizado el LSODE[adamsfunc] de Maple V.
Se obtiene la tabla de diferencias divididas, en los i primeros puntos con i =
0; :::; p¡ 1.
Por (de…nición no 49), calculamos la aproximación xp, que permite escribir la
siguiente línea de la tabla de diferencias divididas y obtener la aproximación xp+1:
Tomando la …la p de la tabla de diferencias divididas, por (de…nición no 51),
calculamos una corrección.
Ver Anexo VI.
3.6 Ejemplos numéricos
3.6.1 Problemas sti¤
Los modelos matemáticos de los fenómenos físicos dan lugar muchas veces a sistemas
de ecuaciones diferenciales ordinarias y P.V.I. Los PVI sti¤ aparecen por primera vez
en el estudio de resortes elásticos de rigidez variable, de ahí su nombre, [43]. Los
métodos de diferencias …nitas son excelentes para el tratamiento numérico de dichos
problemas desde que fue posible su implementación a un ordenador. El desarrollo
de los algoritmos se ha fundamentado en gran parte tanto en los teoremas sobre
convergencia y estabilidad de Dahlquist [9],[10],[11],[12], como en los tratados de
Henrici [44] , Stetter [80] y los trabajos de Gear [40] y Lambert [50]. Muchos de estos
P.V.I., presentan di…cultades de integración por los métodos numéricos tradicionales.

85
Lambert [50] propone los dos problemas siguientes:
Problema no10
BB@
x0
1
x0
2
1
CCA =
0
BB@
¡2 1
1 ¡2
1
CCA
0
BB@
x1
x2
1
CCA +
0
BB@
2 sin(t)
2(cos(t)¡ sin(t))
1
CCA
0
BB@
x1(0)
x2(0)
1
CCA =
0
BB@
2
3
1
CCA
Problema no20
BB@
x0
1
x0
2
1
CCA =
0
BB@
¡2 1
998 ¡999
1
CCA
0
BB@
x1
x2
1
CCA +
0
BB@
2 sin(t)
999(cos(t) ¡ sin(t))
1
CCA
0
BB@
x1(0)
x2(0)
1
CCA =
0
BB@
2
3
1
CCA
ambos tienen la misma solución exacta:0
BB@
x1
x2
1
CCA = 2e¡t
0
BB@
1
1
1
CCA +
0
BB@
sin(t)
cos(t)
1
CCA
Para integrar los dos problemas anteriores en el intervalo [0; 10], aplica el código
RKF45 al problema no1, con TOL = 0:01 y h0 = 0:1 necesitando un número N = 60
evaluaciones para la integración completa en este intervalo. Aplicando el mismo
código con los mismos valores de TOL y h0 se requieren N = 3373 evaluaciones para
completar la solución. Sin embargo cuando les aplica el método 2-step Gauss, (que
tiene orden cuatro como el RKF45, pero es implícito), necesita N = 29 y N = 24
evaluaciones, para el problema no1 y el problema no2, respectivamente. Se tiene dos
problemas similares que se comportan de manera muy diferente cuando se intentan
resolver numéricamente.

86
El fenómeno aquí mostrado se conoce como sti¤ness (rigidez); el problema no2 es
sti¤, el problema no1 no lo es. Ver Lambert [50].
El fenómeno no puede depender de la solución exacta, ya que es la misma para
ambos problemas, y debe ser una característica del sistema diferencial en sí mismo,
por tanto es más apropiado hablar de sistemas sti¤ antes que de problemas sti¤. Esto
induce a considerar no las soluciones particulares de los problemas no1 y no2 que
satisfacen las condiciones iniciales dadas, sino las soluciones generales del sistema, en
las que se requiere calcular los autovalores de la matriz de coe…cientes. En el problema
no1, los autovalores son ¡1 y ¡3; en el problema no2 son ¡1 y ¡1000. Aunque dar
una de…nición rigurosa de sti¤ness, es difícil, Lambert en 1973, propuso la siguiente
”de…nición”.
Sea un sistema lineal no homogéneo de coe…cientes constantes
x0= Ax + g(t)
donde x; g 2Rm y A es una matriz constante de orden m con autovalores ¸i 2 C que
se consideran distintos, con i = 1; :::; m y autovectores correspondientes ci 2 Cm. La
solución general viene dada en la forma
x(t) =mX
i=1
·iet¸ici + xp(t)
donde ·i es una constante arbitraria y xp(t) es una solución particular del sistema
anterior.
Supongamos que Re(¸i) < 0 con i = 1; :::; m. Sean ¸, ¸ 2 f¸i; i = 1; :::; mg
de…nidas del modo siguiente
¯¯Re¸
¯¯ = jRe ¸ij = jRe¸j

87
con i = 1; :::; m. Consideramos la ratio sti¤ness como la razónjRe¸jjRe¸j
que proporciona
una medida de la rigidez del sistema.
En estos términos un sistema lineal de coe…cientes constantes es sti¤ si todos sus
autovalores tienen parte real negativa y la ratio sti¤ness es grande.
Sin embargo esta ”de…nición” no es enteramente satisfactoria, pues se encuentran
ejemplos que la cumplen y no son estrictamente sti¤. [50].
Quizá la mejor ”de…nición” sea la que interpreta lo que ocurre en la práctica: ”Si
un método numérico con una región …nita de estabilidad absoluta, aplicado a un sis-
tema con cualesquiera condiciones iniciales, se ve forzado a usar en un cierto intervalo
de integración, un tamaño de paso que es excesivamente pequeño con respecto a la
suavidad de la solución exacta, en ese intervalo, entonces el sistema se dice sti¤ en
ese intervalo.” [50]
3.6.2 Ejemplo 1
En este ejemplo numérico, vamos a comparar las aproximaciones obtenidas mediante
el método E.I.pPC, aplicado al problema no1 de Lambert, del que sabemos que es no
sti¤ [50], con las obtenidas por el LSODE.
0
BB@
x0
1
x0
2
1
CCA =
0
BB@
¡2 1
1 ¡2
1
CCA
0
BB@
x1
x2
1
CCA +
0
BB@
2 sin(t)
2(cos(t)¡ sin(t))
1
CCA
0
BB@
x1(0)
x2(0)
1
CCA =
0
BB@
2
3
1
CCA

88
con solución exacta:0
BB@
x1
x2
1
CCA = 2e¡t
0
BB@
1
1
1
CCA +
0
BB@
sin(t)
cos(t)
1
CCA
y autovalores ¸ = ¡3 y ¸ = ¡1.
Para un método explícito de p = 7 pasos y 1000 iteraciones (tamaño de paso h =
0:01), obtenemos la grá…ca, (Figura no 3.3) del logaritmo decimal del módulo del error
relativo del método E.I.pE (grá…ca azul), contrastada con la del logaritmo decimal
del módulo del error relativo del LSODE[backfunc], MapleV, con tol = 10¡15(grá…ca
roja).
Para un método predictor-corrector de p = 7 pasos y 1000 iteraciones (tamaño
de paso h = 0:01), obtenemos la grá…ca, (Figura no 3.4) del logaritmo decimal del
módulo del error relativo del método E.I.pPC (grá…ca azul), contrastada con la del
logaritmo decimal del módulo del error relativo del LSODE[backfunc], MapleV, con
tol = 10¡15(grá…ca roja).
Vamos ahora a comparar las aproximaciones obtenidas mediante el método E.I.pPC,
aplicado al problema sti¤ no2 de Lambert [50] con las obtenidas mediante el código
LSODE, Hindmarsh 1980 [1], de paso y orden variable que incorpora Adams Moulton
de orden p : 1 5 p 5 12 para la fase no sti¤ y BDF de orden 1 5 p 5 5 para la
fase sti¤. Este método combina las capacidades de los códigos Gear y GearB, para
resolver problemas sti¤. Ola Fatunla, S [64].
0
BB@
x0
1
x0
2
1
CCA =
0
BB@
¡2 1
998 ¡999
1
CCA
0
BB@
x1
x2
1
CCA +
0
BB@
2 sin(t)
999(cos(t) ¡ sin(t))
1
CCA
89
0
BB@
x1(0)
x2(0)
1
CCA =
0
BB@
2
3
1
CCA
con solución exacta, idéntica a la del problema no 1 anterior, y valores propios ¸ =
¡1000 y ¸ = ¡1.
Para un método explícito de p = 7 pasos y 1000 iteraciones (tamaño de paso h =
0:01), obtenemos la grá…ca, (Figura no 3.5) del logaritmo decimal del módulo del error
relativo del método E.I.pE (grá…ca azul), contrastada con la del logaritmo decimal
del módulo del error relativo del LSODE[backfunc], MapleV, con tol = 10¡15(grá…ca
roja).
Para un método predictor-corrector de p = 7 pasos y 1000 iteraciones (tamaño
de paso h = 0:01), obtenemos la grá…ca, (Figura no 3.6) del logaritmo decimal del
módulo del error relativo del método E.I.pPC (grá…ca azul), contrastada con la del
logaritmo decimal del módulo del error relativo del LSODE[backfunc], MapleV, con
tol = 10¡15(grá…ca roja).
Si comparamos los resultados obtenidos en el problema no 1 y el no 2, de este
ejemplo, se observa que un método numérico potente, como es el LSODE, no presenta
mayor di…cultad en la integración del problema no 1, pero es de resaltar la diferencia
de coste computacional, ver …guras 3.3, 3.4, 3.5, 3.6, cuando se trata de un problema
sti¤, como es el no 2.
Para un método predictor-corrector de p = 7 pasos y 1000 iteraciones (tamaño de
paso h = 0:01), obtenemos la grá…ca (Figura no 3.7) del logaritmo decimal del módulo
del error relativo del método E.I.pE (grá…ca azul), contrastada con la del logaritmo

90
decimal del módulo del error relativo de los siguientes códigos:
- MGEAR[msteppart], Maple V, con errorper = Float(1;¡13) (grá…ca ver-
de).
- LSODE[backfunc], MapleV, con tol = 10¡15(grá…ca roja).
- GEAR, Maple V, con errorper = F loat(1;¡12) (grá…ca negra).
Las grá…cas de tiempo de acceso a la CPU, medido en seg., para el método E.I.pE
de tres, cinco, siete y diez pasos, contrastadas con los tiempos de acceso a la CPU del
LSODE[backfunc], MGEAR[msteppart], GEAR, están representadas en la (Figura no
3.8).
Las grá…cas de tiempo de acceso a la CPU, medido en seg., para el método E.I.pPC
de tres, cinco, siete y diez pasos, contrastadas con los tiempos de acceso a la CPU del
LSODE[backfunc], MGEAR[msteppart], GEAR, están representadas en la siguiente
(Figura no 3.9).
3.6.3 Ejemplo 2
Consideremos el problema siguiente, propuesto, en [57], donde la matriz de coe…cientes
del sistema, tiene autovalores con parte real negativa.
0
BBBBBB@
x0
1
x0
2
x0
3
1
CCCCCCA
=
0
BBBBBB@
0 2 ¡1
¡2 ¡4 2
¡2 ¡3 1
1
CCCCCCA
0
BBBBBB@
x1
x2
x3
1
CCCCCCA
+2"(x3¡ x2)2
0
BBBBBB@
0
1
1
1
CCCCCCA

91
con las condiciones iniciales0
BBBBBB@
x1(0)
x2(0)
x3(0)
1
CCCCCCA
=
0
BBBBBB@
1
1
2
1
CCCCCCA
+ "
0
BBBBBB@
1
¡2
¡2
1
CCCCCCA
solución exacta0
BBBBBB@
x1(t)
x2(t)
x3(t)
1
CCCCCCA
= e¡t
0
BBBBBB@
1 + sin(t)
cos(t) ¡ sin(t)
1 + cos(t) ¡ sin(t)
1
CCCCCCA
+ "e¡2t
0
BBBBBB@
1
¡2
¡2
1
CCCCCCA
y autovalores ¸ = ¡1, ¸ = ¡1 + i, ¸ = ¡1¡ i.
Para un método explícito de p = 8 pasos y 500 iteraciones (tamaño de paso h =
0:1), obtenemos la grá…ca, (Figura no 3.10) del logaritmo decimal del módulo del error
relativo del método E.I.pE (grá…ca azul), contrastada con la del logaritmo decimal
del módulo del error relativo del LSODE[backfunc], MapleV, con tol = 10¡15(grá…ca
roja), y " = 10¡3.
Para un método predictor-corrector de p = 8 pasos y 500 iteraciones (tamaño
de paso h = 0:1), obtenemos la grá…ca, (Figura no 3.11) del logaritmo decimal del
módulo del error relativo del método E.I.pPC (grá…ca azul), contrastada con la del
logaritmo decimal del módulo del error relativo del LSODE[backfunc], MapleV, con
tol = 10¡15(grá…ca roja), y " = 10¡3:
Para un método predictor-corrector de p = 8 pasos y 1000 iteraciones (tamaño
de paso h = 0:01), obtenemos la grá…ca (Figura no 3.12) del logaritmo decimal del
módulo del error relativo del método E.I.pPC (grá…ca azul), contrastada con la del
logaritmo decimal del módulo del error relativo de los siguientes códigos:

92
- MGEAR[msteppart], Maple V, con errorper = Float(1;¡15) (grá…ca ver-
de).
- LSODE[backfunc], MapleV, con tol = 10¡15(grá…ca roja).
- GEAR, Maple V, con errorper = F loat(1;¡12) (grá…ca negra).
3.6.4 Ejemplo 3
Consideramos el sistema, propuesto en [57], con autovalores imaginarios puros, si-
guiente:
0
BBBBBBBBBB@
x0
1
x0
2
x0
3
x0
4
1
CCCCCCCCCCA
=
0
BBBBBBBBBB@
¡1 1 1 0
¡1 1 1 1
¡1 0 0 ¡1
4 ¡4 0 0
1
CCCCCCCCCCA
0
BBBBBBBBBB@
x1
x2
x3
x4
1
CCCCCCCCCCA
+ "
0
BBBBBBBBBB@
0
0
¡8 sin(3t)
¡5e¡t
1
CCCCCCCCCCA
con las condiciones iniciales0
BBBBBBBBBB@
x1(0)
x2(0)
x3(0)
x4(0)
1
CCCCCCCCCCA
=
0
BBBBBBBBBB@
1
1
0
2
1
CCCCCCCCCCA
+ "
0
BBBBBBBBBB@
0
¡1
4
1
1
CCCCCCCCCCA
solución exacta0
BBBBBBBBBB@
x1(t)
x2(t)
x3(t)
x4(t)
1
CCCCCCCCCCA
=
0
BBBBBBBBBB@
cos(t)
cos(t) + sin(2t)
¡ sin(t)¡ sin(2t)
2 cos(2t)
1
CCCCCCCCCCA
+ "
0
BBBBBBBBBB@
sin(3t)
sin(3t) ¡ e¡t
3 cos(3t) + e¡t
e¡t
1
CCCCCCCCCCA
93
y autovalores: ¸ = i, ¸ = ¡i, ¸ = 2i, ¸ = ¡2i.
Para un método explícito de p = 8 pasos y 1000 iteraciones (tamaño de paso
h = 0:1), obtenemos la grá…ca, (Figura no 3.13) del logaritmo decimal del módulo
del error relativo del método E.I.pE (grá…ca azul), contrastada con la del logaritmo
decimal del módulo del error relativo del LSODE[backfunc], MapleV, con tol = 10¡10
(grá…ca roja), y " = 10¡3.
Para un método predictor-corrector de p = 8 pasos y 1000 iteraciones (tamaño
de paso h = 0:1), obtenemos la grá…ca, (Figura no 3.14) del logaritmo decimal del
módulo del error relativo del método E.I.pPC (grá…ca azul), contrastada con la del
logaritmo decimal del módulo del error relativo del LSODE[backfunc], MapleV, con
tol = 10¡10(grá…ca roja), y " = 10¡3:
Para un método predictor-corrector de p = 10 pasos y 1000 iteraciones (tamaño
de paso h = 0:01), obtenemos la grá…ca (Figura no 3.15) del logaritmo decimal del
módulo del error relativo del método E.I.pPC (grá…ca azul), contrastada con la del
logaritmo decimal del módulo del error relativo de los siguientes códigos:
- MGEAR[msteppart], Maple V, con errorper = Float(1;¡18) (grá…ca ver-
de).
- LSODE[backfunc], MapleV, con tol = 10¡20(grá…ca roja).
- GEAR, Maple V, con errorper = F loat(1;¡13) (grá…ca negra).

94
3.6.5 Ejemplo 4
Veamos un caso inestable de autovalores con parte real positiva.
0
BB@
x0
1
x0
2
1
CCA =
0
BB@
1 0
0 1
1
CCA
0
BB@
x1
x2
1
CCA + "
px1
0
BB@
0
1
1
CCA
con las condiciones iniciales
0
BB@
x1(0)
x2(0)
1
CCA =
0
BB@
1
0
1
CCA
y solución exacta 0
BB@
x1
x2
1
CCA = et
0
BB@
1
2"(1¡ e¡t2 )
1
CCA
Para un método explícito de p = 8 pasos y 1000 iteraciones (tamaño de paso
h = 0:1), obtenemos la grá…ca, (Figura no 16) del logaritmo decimal del módulo
del error relativo del método E.I.pE (grá…ca azul), contrastada con la del logaritmo
decimal del módulo del error relativo del LSODE[backfunc], MapleV, (grá…ca roja).
Con tol = 10¡12 y " = 10¡3.
Para un método predictor-corrector de p = 8 pasos y 1000 iteraciones (tamaño
de paso h = 0:1), obtenemos la grá…ca, (Figura no 3.17) del logaritmo decimal del
módulo del error relativo del método E.I.pPC (grá…ca azul), contrastada con la del lo-
garitmo decimal del módulo del error relativo del LSODE[backfunc], MapleV, (grá…ca
roja).Con tol = 10¡12 y " = 10¡3.
Para un método predictor-corrector de p = 8 pasos y 1000 iteraciones (tamaño
de paso h = 0:01), obtenemos la grá…ca (Figura no 3.18) del logaritmo decimal del

95
módulo del error relativo del método E.I.pPC (grá…ca azul), contrastada con la del
logaritmo decimal del módulo del error relativo de los siguientes códigos:
- MGEAR[msteppart], Maple V, con errorper = Float(1;¡14) (grá…ca ver-
de).
- LSODE[backfunc], MapleV, con tol = 10¡20(grá…ca roja).
- GEAR, Maple V, con errorper = F loat(1;¡15) (grá…ca negra).
3.6.6 Ejemplo 5
Para aproximar la solución de un PVI de segundo orden como:
x00
= f (t; x; x0
) con x(t0) = x0 y x0
(t0) = x0
0
se reduce la ecuación diferencial a un sistema de dos ecuaciones de primer orden.
Para ello bastará sustituir x0= v transformándose el PVI anterior en:
x0
= v
v0= f(t; x; v)
x(t0) = x0 y v(t0) = x0
0
Si empleamos un procedimiento como el que acabamos de describir, con frecuencia
podemos reducir un sistema de ecuaciones diferenciales de orden superior a uno de
ecuaciones de primer orden, despejando primero la derivada de orden máximo de cada
variable dependiente y luego haciendo las sustituciones adecuadas para las derivadas
de orden menor.[94].
Consideremos el PVI:

96
x00
1 + 2x00
2 = x0
1¡ 5x1 + et
x00
2 = 2x1 ¡ 2x2 +3t2
x1(0) = 1; x0
1(0) = 0
x2(0) = 0; x0
2(0) = 0
Si de…nimos x0
1 = v y x0
2 = w, las ecuaciones anteriores se transforman en:
x0
1 = v
x0
2 = w
v0= ¡9x1+ 4x2 + v + e
t ¡ 6t2
w0= 2x1 ¡ 2x2+ 3t
2
x1(0) = 1, x2(0) = 0; v(0) = 0; w(0) = 0
y autovalores ¸ = 0:444315 § 3:11327i ,¸ = 0:0556848§ 1:004i.
Para un método predictor-corrector de p = 8 pasos y 200 iteraciones (tamaño
de paso h = 0:01), obtenemos la grá…ca (Figura no 3.19) del logaritmo decimal del
módulo del error relativo del método E.I.pPC (grá…ca azul), contrastada con la del
logaritmo decimal del módulo del error relativo de los siguientes códigos:
- MGEAR[msteppart], Maple V, con errorper = Float(1;¡15) (grá…ca ver-
de).
- LSODE[backfunc], MapleV, con tol = 10¡20(grá…ca roja).
- GEAR, Maple V, con errorper = F loat(1;¡14) (grá…ca negra).

97
3.6.7 Ejemplo 6
Consideremos el problema, altamente oscilatorio, propuesto por G. Denk [14].
0
BB@
x0
1
x0
2
1
CCA =
0
BB@
0 1
¡{2 0
1
CCA
0
BB@
x1
x2
1
CCA +{2
0
BB@
0
t
1
CCA
con { = 314:16, t 2 [0; 1] y condiciones iniciales
0
BB@
x1(0)
x2(0)
1
CCA =
0
BB@
10¡5
1¡ 10¡5{cos{
sin {
1
CCA
solución exacta0
BB@
x1
x2
1
CCA =
0
BB@
t+ 10¡5³cos({ t)¡
cos{
sin {sin({ t)
´
1¡ 10¡5{³sin({ t) +
cos{
sin{cos({ t)
´
1
CCA
y autovalores: ¸ = { i = 314:16i y ¸ = ¡{ i = ¡314:16i.
Para un método predictor-corrector de p = 9 pasos y 100 iteraciones (tamaño
de paso h = 0:01), obtenemos la grá…ca (Figura no 3.20) del logaritmo decimal del
módulo del error relativo del método E.I.pPC (grá…ca azul), contrastada con la del
logaritmo decimal del módulo del error relativo de los siguientes códigos:
- MGEAR[msteppart], Maple V, con errorper = Float(1;¡20) (grá…ca ver-
de).
- LSODE[backfunc], MapleV, con tol = 10¡20(grá…ca roja).
- GEAR, Maple V, con errorper = F loat(1;¡16) (grá…ca negra).

98
3.7 Figuras capítulo 3
3.7.1 Ejemplo 1
LSODE
Método adaptado
t
log(error)
LSODE
Método adaptado
t
log(error)
Figura no 3.3.
Método explícito de 7 pasos, tamaño de paso 0.01
LSODE[backfunc] con tolerancia 10¡15
Tiempos de CPU.LSODE = 74.32 seg
Método adaptado = 262.60 seg
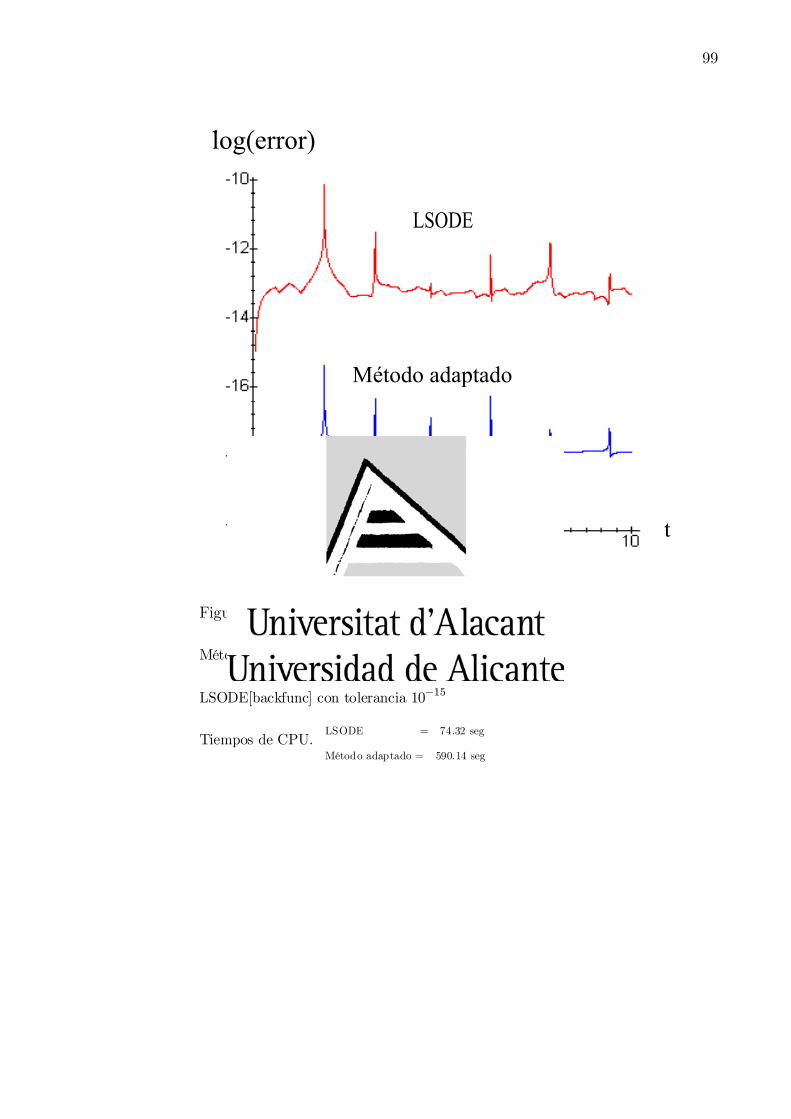
99
LSODE
Método adaptado
t
log(error)
LSODE
Método adaptado
t
log(error)
Figura no 3.4.
Método PC de 7 pasos, tamaño de paso 0.01
LSODE[backfunc] con tolerancia 10¡15
Tiempos de CPU.LSODE = 74.32 seg
Método adaptado = 590.14 seg
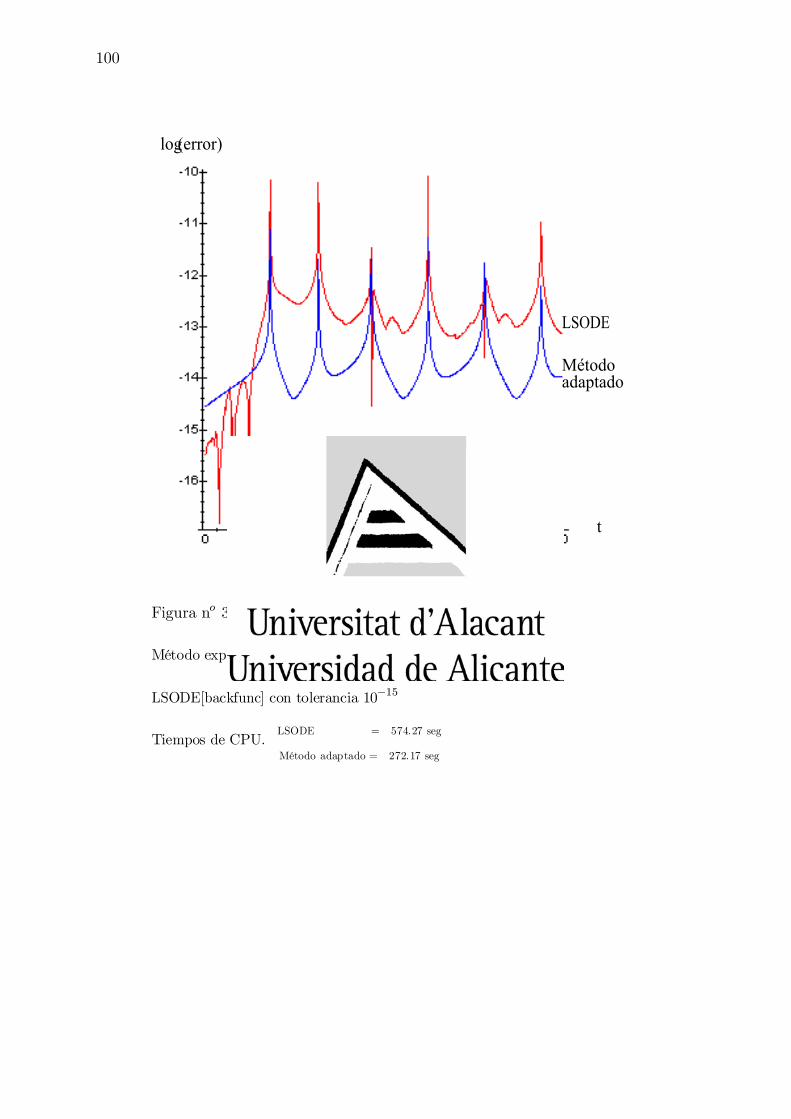
100
t
log(error)
LSODE
Métodoadaptado
Figura no 3.5.
Método explícito de 7 pasos, tamaño de paso 0.01
LSODE[backfunc] con tolerancia 10¡15
Tiempos de CPU.LSODE = 574.27 seg
Método adaptado = 272.17 seg

101
t
log(error)
Método
adaptado
LSODE
Figura no 3.6.
Método PC de 7 pasos, tamaño de paso 0.01
LSODE[backfunc] con tolerancia 10¡15
Tiempos de CPU.LSODE = 574.27 seg
Método adaptado = 580.65 seg
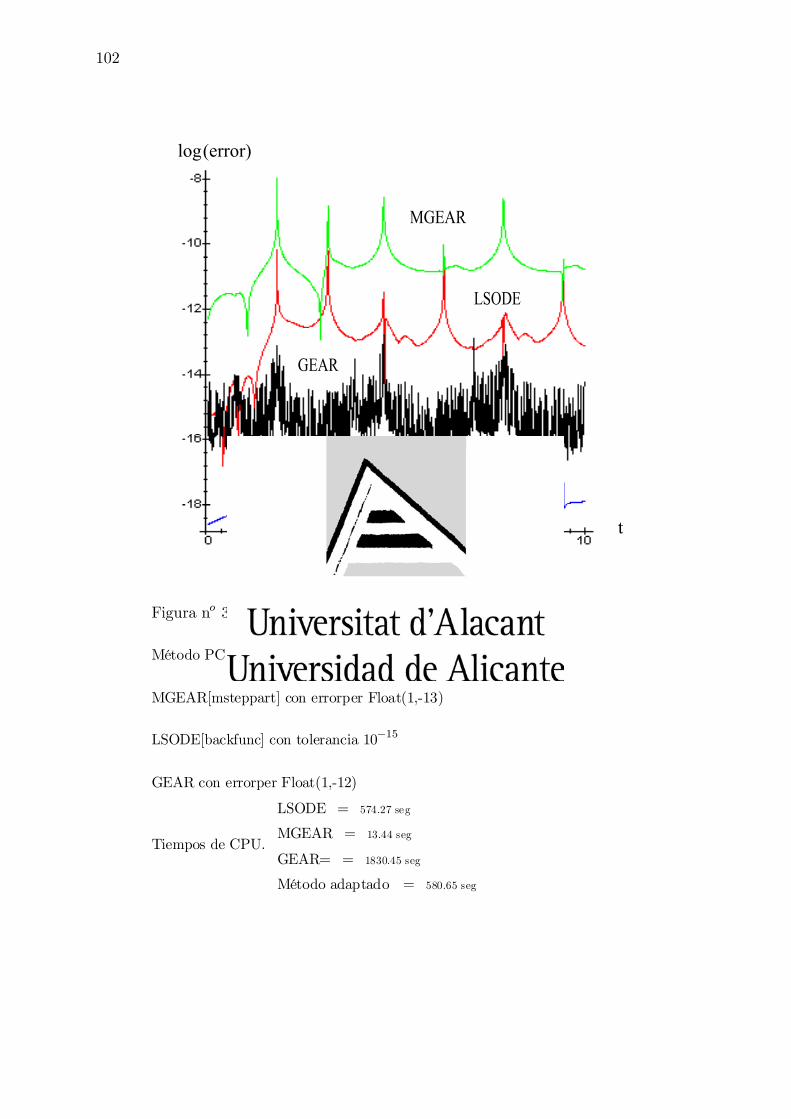
102
t
log (error)
MGEAR
LSODE
GEAR
Método adaptado
Figura no 3.7.
Método PC de 7 pasos, tamaño de paso 0.01
MGEAR[msteppart] con errorper Float(1,-13)
LSODE[backfunc] con tolerancia 10¡15
GEAR con errorper Float(1,-12)
Tiempos de CPU.
LSODE = 574.27 seg
MGEAR = 13.44 seg
GEAR= = 1830.45 seg
Método adaptado = 580.65 seg

103
Tiempos de la CPU en seg..
log (error)LSODE
GEARMGEAR
Método de tres pasos
Método decinco pasos
Método de siete pasos
Método dediez pasos
Figura no 3.8.
Grá…cas de tiempo de acceso a la CPU, del método
E.I.pE, contrastadas con los métodos LSODE,
MGEAR y GEAR.

104
Método detres pasos
Método de cinco pasos
Método de siete pasos
Métodode diezpasos
LSODE
GEAR
MGEAR
Tiempos de la CPU en seg
log (error)
Figura no 3.9.
Grá…cas de tiempo de acceso a la CPU, del método
E.I.pPC, contrastadas con los métodos LSODE,
MGEAR y GEAR.

105
3.7.2 Ejemplo 2
t
log(error)
LSODE
Método
adaptado
Figura no 3.10.
Método explícito de 8 pasos, tamaño de paso 0.1 y " igual a 10¡3
LSODE[backfunc] con tolerancia 10¡15.
Tiempos de CPU.LSODE =75.76 seg
Método adaptado =167.67 seg
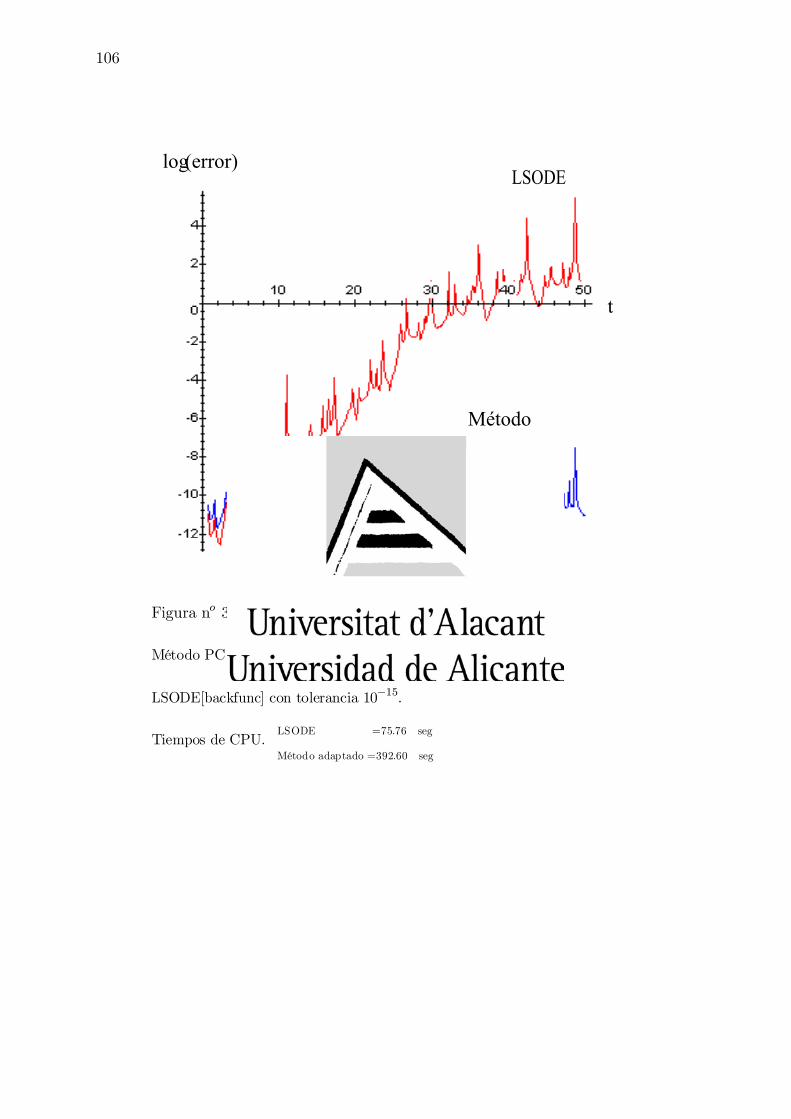
106
t
log(error)LSODE
Método
adaptado
Figura no 3.11.
Método PC de 8 pasos, tamaño de paso 0.1 y " igual a 10¡3
LSODE[backfunc] con tolerancia 10¡15.
Tiempos de CPU.LSODE =75.76 seg
Método adaptado =392.60 seg

107
t
log (error)
Método adaptado
LSODE
GEAR
MGEAR
Figura no 3.12.
Método PC de 8 pasos, tamaño de paso 0.01 y " igual a 10¡3
MGEAR con errorper Float(1,-15)
LSODE[backfunc] con tolerancia 10¡15
GEAR con errorper Float(1,-12)
Tiempos de CPU.
LSODE = 153.61 seg
MGEAR = 60.27 seg
GEAR = 42.2 seg
Método adaptado = 768.24 seg
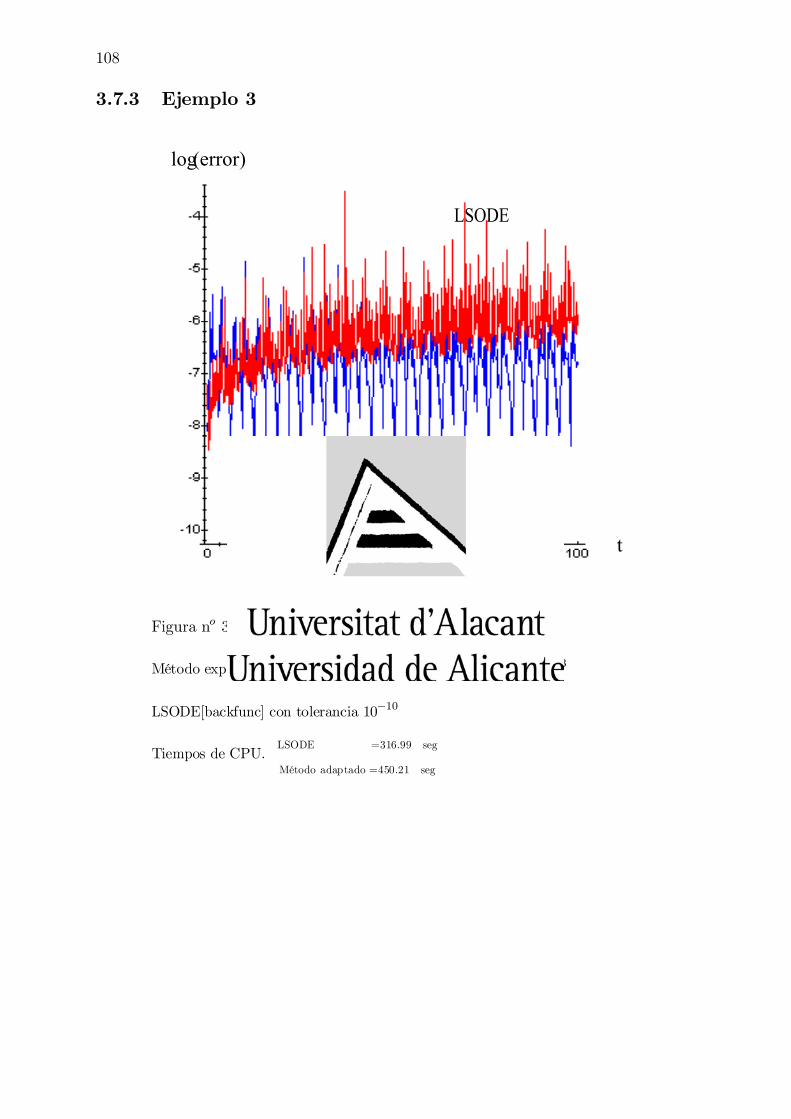
108
3.7.3 Ejemplo 3
t
log(error)
LSODE
Mëtodo
adaptado
Figura no 3.13.
Método explícito de 8 pasos, tamaño de paso 0.1 y " igual a 10¡3
LSODE[backfunc] con tolerancia 10¡10
Tiempos de CPU.LSODE =316.99 seg
Método adaptado =450.21 seg

109
t
log(error)
LSODE
Método adaptado
Figura no 3.14
Método PC de 8 pasos, tamaño de paso 0.1 y " igual a 10¡3
LSODE[backfunc] con tolerancia 10¡10
Tiempos de CPU.LSODE =316.99 seg
Método adaptado =1010.63 seg

110
LSODE
t
log (error)
Métodoadaptado
GEAR
MGEAR
Figura no 3.15
Método PC de 10 pasos, tamaño de paso 0.01 y " igual a 10¡3
MGEAR con errorper Float(1,-18)
LSODE[backfunc] con tolerancia 10¡20
GEAR con errorper Float(1,-13)
Tiempos de CPU.
LSODE = 982.65 seg
MGEAR = 307.11 seg
GEAR = 90.82 seg
Método adaptado = 1129.69 seg

111
3.7.4 Ejemplo 4
t
log(error)
LSODE
Método
adaptado
Figura no 3.16
Método explícito de 8 pasos, tamaño de paso 0.1 y " igual a 10¡3
LSODE[backfunc] con tolerancia 10¡12
Tiempos de CPU.LSODE = 355.34 seg
Método adaptado = 416.85 seg

112
t
log(error)
Método
adaptado
LSODE
Figura no 3.17
Método PC de 8 pasos, tamaño de paso 0.1 y " igual a 10¡3
LSODE[backfunc] con tolerancia 10¡12
Tiempos de CPU.LSODE = 355.34 seg
Método adaptado = 834.26 seg

113
t
log (error)
MGEAR
LSODE
GEAR
Método adaptado
Figura no 3.18
Método PC de 8 pasos, tamaño de paso 0.01 y " igual a 10¡3
MGEAR con errorper Float(1,-14)
LSODE[backfunc] con tolerancia 10¡20
GEAR con errorper Float(1,-15)
Tiempos de CPU.
LSODE = 574.27 seg
MGEAR = 263.58 seg
GEAR = 102.53 seg
Método adaptado = 272.17 seg

114
3.7.5 Ejemplo 5
t
log(error)
MGEAR
LSODE
GEAR
Método adaptado
Figura no 3.19
Método PC de 8 pasos, tamaño de paso 0.01.
MGEAR con errorper Float(1,-15)
LSODE[backfunc] con tolerancia 10¡20
GEAR con errorper Float(1,-14)
Tiempos de CPU.
LSODE = 544.27 seg
MGEAR = 55.60 seg
GEAR = 48.36 seg
Método adaptado = 221.84 seg

115
3.7.6 Ejemplo 6
LSODE
MGEAR
GEAR
Método adaptado
t
log(error)
LSODE
MGEAR
GEAR
Método adaptado
t
log(error)
Figura no 3.20
Método PC de 9 pasos, tamaño de paso 0.01.
MGEAR con errorper Float(1,-20)
LSODE[backfunc] con tolerancia 10¡20
GEAR con errorper Float(1,-16)
Tiempos de CPU.
LSODE = 8848.92 seg
MGEAR = 3534.13 seg
GEAR = 196.60 seg
Método adaptado = 73.14 seg

116

Anexo I
> w0:=proc(kmax)
> local Y,i,k,g0,C,sigma;
> with(linalg):
> Digits:=:
> Y:=array(0..kmax,0..kmax);
> sigma:=proc(indice,matriz)
> local f,c,resultado;
> f:=rowdim(matriz);
> c:=coldim(matriz);
> resultado:=(array(1..f,1..c,identity)+matriz/indice)^indice;
> RETURN(resultado);
> end;
> for i from 0 to kmax do Y[i,0]:=sigma(2^i,H) od;
> for k from 1 to kmax do
> for i from 0 to kmax-k do
> Y[i,k]:=Y[i+1,k-1]+1/(2^k-1)*(Y[i+1,k-1]-Y[i,k-1]);
117

118
> od;
> od;
>Y[0,kmax];
> C:= evalf(evalm(Y[0,kmax]));
> RETURN(C);
> end:

Anexo II
> w1:=proc(kmax)
> local Y,i,k,g1,C,sigma1;
> with(linalg):
> Digits:=:
> Y:=array(0..kmax,0..kmax):
> sigma1:=proc(n,matriz)
> local resultado:
> resultado:=sum(’(product((n-p),p=0..(j-1))/(j!*n^j))*matriz^(j-1)’,’j=1..n’):
> RETURN(resultado):
> end:
> for i from 0 to kmax do Y[i,0]:=sigma1(2^i,H) od:
> for k from 1 to kmax do
> for i from 0 to kmax-k do
> Y[i,k]:=Y[i+1,k-1]+1/(2^(k-1))*(Y[i+1,k-1]-Y[i,k-1]):
> od
> od:
119

120
> Y[0,kmax]:
> C:= evalf(evalm(Y[0,kmax])):
> RETURN(t*C):
> end:

Anexo III
> w2:=proc(kmax)
> local Y,i,k,g2,C,sigma2;
> with(linalg):
> Digits:=:
> Y:=array(0..kmax,0..kmax):
> sigma2:=proc(n,matriz)
> local resultado:
> resultado:=sum(’(product((n-p),p=0..(j-1))/(j!*n^j))*matriz^(j-2)’,’j=2..n’):
> RETURN(resultado):
> end:
> for i from 0 to kmax do Y[i,0]:=sigma2(2^i,H) od:
> for k from 1 to kmax do
> for i from 0 to kmax-k do
> Y[i,k]:=Y[i+1,k-1]+1/(2^(k-1))*(Y[i+1,k-1]-Y[i,k-1]):
> od
> od:
121

122
> Y[0,kmax]:
> C:= evalf(evalm(Y[0,kmax])):
> RETURN(t^2*C):
> end:

Anexo IV
> w3:=proc(kmax)
> local Y,i,k,g3,C,sigma3;
> with(linalg):
> Digits:=:
> Y:=array(0..kmax,0..kmax):
> sigma3:=proc(n,matriz)
> local resultado:
> resultado:=sum(’(product((n-p),p=0..(j-1))/(j!*n^j))*matriz^(j-3)’,’j=3..n’):
> RETURN(resultado):
> end:
> for i from 0 to kmax do Y[i,0]:=sigma3(2^i,H) od:
> for k from 1 to kmax do
> for i from 0 to kmax-k do
> Y[i,k]:=Y[i+1,k-1]+1/(2^(k-1))*(Y[i+1,k-1]-Y[i,k-1]):
> od
> od:
123

124
> Y[0,kmax]:
> C:= evalf(evalm(Y[0,kmax])):
> RETURN(t^3*C):
> end:

Anexo V
> restart:
> Digits:=:
> with(linalg):
> q:=:
> p:=:
> n:=:
> h:=:
Matriz del sistema
> A:=matrix(q,q,[]);
> zz:=array(1..q,1..1):
Ecuaciones del sistema
> f.1:=;
> f.2:=:
> sys:=:
> init:=:
> fcns :=[]:
125
126
Cálculo de las funciones G
> P:=inverse(A):
> J:=evalm(array(identity,1..q,1..q)):
> H:=evalm(h*A):
> w0:=proc(kmax)
> local Y,i,k,g0,C,sigma;
> Y:=array(0..kmax,0..kmax);
> sigma:=proc(indice,matriz)
> local f,c,resultado;
> f:=rowdim(matriz);
> c:=coldim(matriz);
> resultado:=(array(1..f,1..c,identity)+matriz/indice)^indice;
> RETURN(resultado);
> end;
> for i from 0 to kmax do Y[i,0]:=sigma(2^i,H) od;
> for k from 1 to kmax do
> for i from 0 to kmax-k do Y[i,k]:=Y[i+1,k-1]+1/(2^k-1)*(Y[i+1,k-1]-Y[i,k-1]);
> od
> od;
> Y[0,kmax];
> C:= evalf(evalm(Y[0,kmax]));
> RETURN(C);
> end:

127
> kmax:=15:
> g0:=w0(kmax):
> g:=array(0..p):
> g[0]:=evalm(w0(kmax)):
> for j from 1 to p do:
> g[j]:=evalm(P&*(g[j-1]-h^(j-1)/(j-1)!*J)):
> od:
Matriz recurrente.
> S:=array(1..p,1..p):
> S[1,1]:=1:
> for i from 2 to p do
> S[i,1]:=0:
> od:
> for j from 2 to p do
> S[1,j]:=0:
> od:
> for j from 2 to p do
> for i from 2 to p do
> S[i,j]:=S[i-1,j-1]-S[i,j-1]*(2-j)*h:
> od:
> od:
Cálculo de ¤i
> l:=array(0..p):
128
> for j from 1 to p do
> l[j]:=evalm(sum(’S[i,j]*(i-1)!*g[i]’, ’i’=1..j));
> od:
Cálculo de las diferencias divididas.
> x:=array(0..n):
> for i from 0 to n do
> x[i]:=array(1..q,1..1);
> od:
> t:=array(0..n):
> for i from 0 to n do t[i]:=h*i od:
> for j from 1 to q do y.j:=array(0..n):
> od:
> for k from 1 to q do
> for i from 0 to (p-1) do y.k[i]:=evalf(f.k(t[i],x[i])) od:
> od:
> for j from 1 to q do DIF.j:=array(0..n,0..(p-1)) od:
> for k from 1 to q do
> for i from 0 to (p-1) do DIF.k[i,0]:=y.k[i] od:
> od:
> for k from 1 to q do
> for j from 1 to (p-1) do
> for i from j to (p-1) do
> DIF.k[i,j]:=(DIF.k[i,j-1]-DIF.k[i-1,j-1])/(t[i]-t[i-j]);

129
> od:
> od:
> od:
Aplicación del método explícito.
> a:=array(1..p):
> for i from 1 to p do
> a[i]:=array(1..q,1..1);
> od:
> for i from (p-1) to (n-1) do
> for j from 1 to p do
> for k from 1 to q do
> a[j][k,1]:=DIF.k[i,j-1];
> od:
> od:
> x[i+1]:=evalm(g[0]&*x[i]+sum(’l[j]&*a[j]’,’j’=1..p));
> for k from 1 to q do
> y.k[i+1]:=evalf(f.k(t[i+1],x[i+1])):
> od:
> for j from 1 to q do
> DIF.j[i+1,0]:=y.j[i+1]:
> od:
> for k from 1 to (p-1) do
> for u from 1 to q do

130
> DIF.u[i+1,k]:=(DIF.u[i+1,k-1]-DIF.u[i,k-1])/(t[i+1]-t[i+1-k]):
> od:
> od:
> od:

Anexo VI
> restart:
> Digits:=:
> with(linalg):
> q:=:
> p:=:
> n:=:
> h:=:
Matriz del sistema.
> A:=matrix(q,q,[]);
Ecuaciones del sistema.
> f.1:=
> f.2:=
> sys:=:
> init:=:
> fcns :=
Cálculo de las funciones G
131
132
> P:=inverse(A):
> J:=evalm(array(identity,1..q,1..q)):
> H :=evalm(h*A):
> w0:=proc(kmax)
> local Y,i,k,g0,C,sigma;
> with(linalg):
> Y:=array(0..kmax,0..kmax);
> sigma:=proc(indice,matriz)
> local f,c,resultado;
> f:=rowdim(matriz);
> c:=coldim(matriz);
> resultado:=(array(1..f,1..c,identity)+matriz/indice)^indice;
> RETURN(resultado);
> end;
> for i from 0 to kmax do Y[i,0]:=sigma(2^i,H) od;
> for k from 1 to kmax do
> for i from 0 to kmax-k do Y[i,k]:=Y[i+1,k-1]+1/(2^k-1)*(Y[i+1,k-1]-Y[i,k-1]);
> od
> od;
> Y[0,kmax];
> C:= evalf(evalm(Y[0,kmax]));
> RETURN(C);
> end:

133
> kmax:=15:
> g0:=w0(kmax):
> g:=array(0..p+1):
> g[0]:=evalm(w0(kmax)):
> for j from 1 to p+1 do:
> g[j]:=evalm(P&*(g[j-1]-h^(j-1)/(j-1)!*J)):
> od:
Cálculo de la matriz recurrente, explícito.
> S:=array(1..p,1..p):
> S[1,1]:=1:
> for i from 2 to p do
> S[i,1]:=0:
> od:
> for j from 2 to p do
> S[1,j]:=0:
> od:
> for j from 2 to p do
> for i from 2 to p do
> S[i,j]:=S[i-1,j-1]-S[i,j-1]*(2-j)*h:
> od:
> od:
Cálculo de la matriz recurrente, implícito.
> Q:=array(1..p+1,1..p+1):

134
> Q[1,1]:=1:
> Q[1,2]:=-h:
> for i from 2 to p+1 do
> Q[i,1]:=0:
> od:
> for j from 3 to p+1 do
> Q[1,j]:=0:
> od:
> for j from 2 to p+1 do
> for i from 2 to p+1 do
> Q[i,j]:=Q[i-1,j-1]-Q[i,j-1]*(3-j)*h:
> od:
> od:
Cálculo de las ¤i.
> l:=array(0..p):
> for j from 1 to p do
> l[j]:=evalm(sum(’S[i,j]*(i-1)!*g[i]’, ’i’=1..j));
> od:
Cálculo de las ¡i.
> ll:=array(0..p+1):
> for j from 1 to p+1 do
> ll[j]:=evalm(sum(’Q[i,j]*(i-1)!*g[i]’, ’i’=1..j));
> od:
135
Cálculo de las diferencias divididas.
> x:=array(0..n):
> for i from 0 to n do
> x[i]:=array(1..q,1..1);
> od:
> X:=array(0..n):
> for i from 0 to n do
> X[i]:=array(1..q,1..1);
> od:
> t:=array(0..n):
> for i from 0 to n do t[i]:=h*i od:
> for j from 1 to q do y.j:=array(0..n):
> od:
> for k from 1 to q do
> for i from 0 to (p-1) do y.k[i]:=evalf(f.k(t[i],x[i])) od:
> od:
> for j from 1 to q do DIF.j:=array(0..n,0..p) od:
> for k from 1 to q do
> for i from 0 to (p-1) do DIF.k[i,0]:=y.k[i] od:
> od:
> for k from 1 to q do
> for j from 1 to (p-1) do
> for i from j to (p-1) do

136
> DIF.k[i,j]:=(DIF.k[i,j-1]-DIF.k[i-1,j-1])/(t[i]-t[i-j]);
> od:
> od:
> od:
Aplicación del método predictor-corrector.
> a:=array(1..p):
> for i from 1 to p do
> a[i]:=array(1..q,1..1);
> od:
> b:=array(1..p+1):
> for i from 1 to p+1 do
> b[i]:=array(1..q,1..1);
> od:
> for i from (p-1) to (n-1) do
> for j from 1 to p do
> for k from 1 to q do
> a[j][k,1]:=DIF.k[i,j-1];
> od:
> od:
> x[i+1]:=evalm(g[0]&*x[i]+sum(’l[j]&*a[j]’,’j’=1..p));
> for k from 1 to q do
> y.k[i+1]:=evalf(f.k(t[i+1],x[i+1])):
> od:

137
> for j from 1 to q do
> DIF.j[i+1,0]:=y.j[i+1]:
> od:
> for k from 1 to p do
> for u from 1 to q do
> DIF.u[i+1,k]:=(DIF.u[i+1,k-1]-DIF.u[i,k-1])/(t[i+1]-t[i+1-k]):
> od:
> od:
> for j from 1 to p+1 do
> for k from 1 to q do
> b[j][k,1]:=DIF.k[i+1,j-1];
> od;
> od;
> X[i+1]:=evalm(g[0]&*x[i]+sum(’ll[j]&*b[j]’,’j’=1..p+1));
> x[i+1]:=evalm(X[i+1]):
> od:

BIBLIOGRAFIA138
Alan C.: Odepack, a Systemized Collection of ODE Solvers. Hindmarsh Scienti-…c Computing, R. S. Stepleman et al. (eds.) North-Holland, Amsterdam, (1983).
Battin, R.H.: An introduction to the Mathematics and Methods of Astrodyna-mics. New York: AIAA (1987).
Bettis, D.G.: Numerical Integration of Products of Fourier and Ordinary Poli-nomials. Numer. Math. 14 (1970), 421.
Birkho¤, G.y MacLane, S.:Algebra Moderna. Ed. Vicens Vives, (1980).
Cash, J.R.: On the exponential …tting of composite, multiderivative linear mul-tistep methods. SIAM J. Numer. Anal. Vol. 18, no5 (1981), 808.
Carrillo de Albornoz, A.,Llamas Centeno, I..: Maple V, aplicaciones matemáti-cas. RA-MA. Madrid (1995).
Carrillo, P. and Saad, Y.: Preconditioning the Matrix Exponential Operatorwith Applications. Journal of Scienti…c Computing. Vol 13, no 3, (1998), 275.
Clark, A.: Elementos de Álgebra Abstracta. Ed. Alhambra, (1974)
Dahlquist, C.: Convergence and stability in the numerical integration of ordi-nary di¤erential equations. Math. Scand. 4, (1956), 33.
Dahlquist, C.: Stability and error bounds in the numerical solutions of ordi-nary di¤erential equations. Thesis in Trans. Royal Inst of Technology no130.Stockholm. (1959)
Dahlquist, C.: On stability error Analysis for sti¤ non linear problems. Reportno TRITA-NA-7508, Dept. of Information Processing, Computer Science, RoyalInst of Technology. Stockholm. (1975).
Dahlquist, C.: Error analysis for a class of a methods for sti¤ non linear initialvalue problems. Springer Verlag. Berlin. (1976).
Deprit, A, Elipe, A. and Ferrer, S. Celes. Mech. 58 (1994), 151.
Denk, G.: A new numerical method for de integration of highly oscillatorysecond-order ordinary di¤erential equations .App. Num. Math. 13 (1993), 57.
Deu‡hard, P.: A study of extrapolation methods based on multistep schemeswithout parasitic solutions. ZAMP. 30 (1979), 177.
Deu‡hard, P.: Kepler discretization in regular celestial mechanics. Celes. Mech.21 (1980), 213

139
Edwards W.S., Tuckerman, L.S., Friesner R.A., and Sorensen,D.C.: Krylovmethods for the incompressible Navier-Stokes equations. J. Comput. Phys, 110,(1994), 82.
Enright, W.H.:The Relative E¢ciency of Alternative Defect Control Schemesfor High Order Continuous Runge-Kutta Formulas. Technical Report 252/91,(1991).
Fairén, V., Martín, P. and Ferrándiz, J.M.: Numerical tracking of small devia-tions from analytically known periodic orbits. Computers in Physics. Vol 8, no
4, (1994), 455.
Ferrándiz, J.M.: A general cononical transformation increasing the number ofvariables with application to the two-body problem. Celes. Mech. 41 (1988),343.
Ferrándiz, J.M.: Linearization in special cases of perturbed Keplerian motions.Celes. Mech. 39 (1986) 23
Ferrándiz, J.M.: A new set of canonical variables for orbit calculation. Proce-edings of the Second International Symposium on Spacecraft Flight Dynamics,Darmstadt, FR Germany, ESA SP-255, (1986), 361.
Ferrándiz, J.M.: A general canonical transformation increasing the number ofvariables with application to the two-body problem. Celes. Mech. 41 (1988),343.
Ferrándiz, J.M., Ferrer, S. y Sein-Echaluce, L.: Genaralized elliptic anomalies.Celes. Mech. 40, (1987), 315.
Ferrándiz, J.M., Martín, P., Vigo, J.: Special algorithms to limit the errorgrowth in long-term computation of satellite orbits. Proceeding AAS/AIAASpace‡igh Mechanics meeting. Colorado-Spring (1992), 1167.
Ferrándiz, J.M and Novo, S.: Improved Bettis methods for long-term prediction.Predictability, Stability and Chaos in N-Body Dynamical Systems. A.E. Roy Ed,Plenum Publishing Corporation, NATO ASI Series C. (1991), 515.
Ferrándiz, J.M. y Sansaturio, M. E.: Elemento de tiempo en variables de Fe-rrándiz. Actas XIV Jornadas Hispano-Lusas de Matematicas, Puerto de la Cruz,Vol III, (1989), 1231.
Ferrándiz, J.M. y Sansaturio, M.E.: Extend canonical transformations with re-dundant variables: Hamiltonian and Lagrangian formulations and degenerition.(1992).
Ferrándiz, J.M, Sansaturio, M.E. and Pojmand J.R.: Increased accuracy of com-putations in the main satellite problem throught linearization methods. Celes.Mech. 53 (1992), 347.

140
Ferrándiz, J.M, Sansaturio, M.E. and Vigo, J.: On Long-time predictions ofsatellite orbits by numerical integrations on Predictability, Stability and Chaosin N-Body Dynamical Systems. A.E. Roy Ed, Plenum Publishing Corporation,NATO ASI Series C. (1991), 387.
Ferrándiz, J.M, Sansaturio, M.E. and Vigo, J.: Long-time predictions for highlyeccentric orbits. Instability, Chaos and Predictability in Celestial Mechanics andStellar Dynamics. I U A Symp (1993), 353.
Ferrándiz, J.M, Vigo J. and .Sansaturio, M.E.: On the Accurate NumericalComputation of Highly eccentric Orbits. Proceeding AAS/AIAA Space‡igh Me-chanics meeting. Colorado-Spring (1992), 1185.
Ferrándiz, J.M, and Vigo, J.: Integración numérica precisa de osciladores per-turbados a largo plazo. Actas del XII CEDYA / II Congreso de MatemáticaAplicada, Oviedo. (1991), 123
Ferrándiz, J.M, Vigo, J. and Martín, P.: Reducing the error growth in thenumerical propagation of satellite orbits. Proceedings of the Second Internatio-nal Symposium on Spacecraft Flight Dynamics, Darmstadt, FR Germany, ESASP-326, (1991), 49.
Ferrándiz, J.M, Vigo-Aguiar, J.: New numerical method improving the integra-tion of time in KS regularization. J. Guidance. Vol 19, no 3, (1996), 742.
Ferrard, J-M.: Maths et Maple. Dunod. Paris (1998).
Franco, J.M., Correas, J.M. y Petriz, F.: Métodos adaptados de tipo Störmer- Cowell de orden elevado. Revista Internacional de Métodos Numéricos paraCálculo y Diseño en Ingeniería. Vol 7, no 2 (1991), 193.
Friesner, R.A., Tuckerman, L.S., Dornblaser, B.C., and Russo, T.V.: A met-hod of exponential propagation of large system of sti¤ nonlinear di¤erentialequations. J. Sci. Comput. 4, (1989), 327.
Gautschi, W.: Numerical integration of ordinary di¤erential equations bases ontrigonometric polynomials. Numer. Math, 3 (1961), 381.
Gear, C.W.: Numerical Initial Value Problems in Ordinary Di¤erential Equa-tions. Prentice-Hall, (1971).
Grigorie¤, R.D.:Stability of Multistep- Methods on Variable Grids. Numer.Math. 42, (1983), 359.
Goodyear, W.H.: Completely General Closed-Form Solution for Coordinatesand Partial Derivatives of the Two-Body Problem. Astron. J. 70, (1965), 189.
Hairer, E., Wanner, G.:Solving Ordinary Di¤erential Equations II. Springer-Verlag. New York, (1996).

141
Henrici, P.: Discrete variable methods in ordinary di¤erential equations. JohnWiley and Sons, Inc. New York (1962).
Herrick, S.: Universal Variables. Astron. J. 70, (1965), 309.
Herstein, I.N.: Álgebra Moderna. Ed. Trillas. Mexico (1980)
Hochbruck, M and Lubich, Ch.: On Krylov subespace approximations to thematrix exponential operator. SIAM, J. Numer Anal. 34, (1997), 1911.
Kirchgraber, U.: An ODE-Solver Based on the Method of Averaging. Numer.Math. 53, (1988), 621
Kreider, D.L., Kuller, R.G. y Ostberg, D.R.: Ecuaciones Diferenciales. FondoEducativo Interamericano, (1973).
Lambert, J.D.: Numerical methods for ordinary di¤erential systems. John Wi-lley and Sons Ltd., New York, 1991.
Lambert, J.D.and Sigurdsson, S.T.: Multistep methods with variable matrixcoe¢cients. SIAM J. Numer. Analysis, 4 (1972), 715
Lentin, A., and Rivaud, J.: Álgebra Moderna. Ed. Aguilar, (1967).
Lyche, T.: Chebyshevian Multistep Methods for Ordinary Di¤erential Equa-tions. Numer. Math. 19 (1972), 65.
MacDonald, I.G.: Symmetric Functions and Hall Polinomials. Oxford Univer-sity Press Inc. New York (1998)
Martín, J.A., Morera, J.L. and Sirvent, A.:Linear Multistep Matrix Methods fora Class of Functional Di¤erential Equations: Convergence and Error Bounds.Mathl. Comput. Modelling. Vol 28, no 10, (1998), 17.
Martín, P. and Ferrándiz, J. M.: Multistep numerical methods based on Scheife-le G-functions with application to satellite dynamics. SIAM J. Numer. Analysis,34 (1997), 359
Martín, P. and Ferrándiz. J.M.: Numerical integration of perturbed linear sys-tems. Applied Numerical Mathematics, 31 (1999), 183.
Meinardus, G.: On the asymptotic behavior of iteration sequences. Proceedingsof the Fifth South African Symposium on Numerical Analysis. Durban (199).
Meinardus, G. und Merz, G.: Praktische Mathematik II. Bibliographisches Ins-titud. Mannheim-Zürich. (1982).
Milne-Thomson, L.M.: The calculus of …nite di¤erences. The Macmillan Press.New York, 1981.

142
Moler, C. and van Loan, C.: Nineteen dubious ways to compute the exponentialof a matrix. SIAM. Rev. 29, (1978), 801.
Nagle, R. K. y Sa¤, E. B.: Fundamentos de ecuaciones diferenciales. Addison -Wesley Iberoamericana (1992)
Neta, B. and Ford, C.H.: Families of methods for ordinary di¤erential equationsbased on trigonometric polynomials. J. of Comp. and Appl. Math. 10 (1984),33.
Ola Fatunla, S.:Numerical methods for initial value problems in ordinary di¤e-rential equations. Academic Press Inc.New York, (1988).
Palacios, M. and Franco, J.M. Adv. Astronaut. Sci. 68 (1989), 3.
Pérez López, C.: Métodos matemáticos y programación con Maple V. Ed. RA-MA, (1998).
Pitkin, E.T.: A Regularized Approach to Universal Variables. AIAA Journal 3,no 8, (1965).
Pitkin, E.T.: Second Transition Partial Derivatives Via Universal Variables.Journal of the Astronautical Sciencies 13, no 3, (1965).
Pitkin, E.T.: Integration with Universal Variables. AIAA J. 4, no 3, (1966).
Richardson, D. L. and Vigo-Aguiar, J.: A family of Variable Step ChebyshevMethods for Precise Integration of Perturbed Harmonic Oscillator.Adv. Astro-naut. Sci. vol 95 (1997), 1525.
Roy, A.E.: Orbital Motion. Institute of Physics Publishing. London (1978).
Simos, T. E.: Some new four-step exponential-…tting methods for de numericalsolution of the radial Schrödinger equation. IMA J. Numer. Anal. 11 (1991),347.
Simos, T. E. and Raptis, A. D.: A fourth-order Bessel …tting method for thenumerical solution of the Schrödinger equation. J. Comp. and Appl. Math. 43(1992), 313.
Scheifele, G.: On numerical integration of perturbed linear oscillating systems.ZAMP. 22 (1971), 186.
Shepperd, S.W.: Universal Keplerian State Transition Matrix. Celes. Mech. 35,(1985), 129.
Shepperd, S.W.: Naturally Ocurring Continued Fractions in the Variation ofKepler´s Equation. Celes. Mech. 42, (1988), 91.

143
Ste¤ensen, J.F.: On the Di¤erential Equations of Hill in the Theory of theMotion of the Moon. Acta Mathematica. 93, (1955), 169.
Ste¤ensen, J.F.: On the Di¤erntial Equations of Hill in the Theory of the Motionof the Moon (II). Acta Mathematica. 95, (1955), 25.
Ste¤ensen, J.F.: On the Restricted Problem of Three Bodies.Mat. Fys. Danske,Vid. Selsk 30, no 18, (1956).
Stetter, H.J. Analysis of discretization methods for ordinary di¤erential equa-tions. Springer, Berlin-Heildelberg-New York, 1973.
Stickel, E.: Über die Berechnung elementarer Matrixfunktionen. DissertationUniversität Ulm. 1985.
Stiefel, E.L. and Scheifele, G.: Linear and Regular Celestial Mechanics. Sprin-ger, Berlin-Heldelberg-New York (1971).
Szebehely, V. G.: Theory of Orbits, the Restricted Problem of three Bodies.Academic Press, New York, 1967.
Van Dooren, R.: Stabilization of Cowell’s clasical …nite di¤erence method fornumerical integration. J. of Comp. Physics, 16, (1974), 186.
Vanthournout, J., Vande Berge, G. and De Meyer, H.: Families of backwarddi¤erentiation methods based on a new type of mixed interpolation. Comput.Math. Appl. 20 (1990), 19.
Vigo-Aguiar, J. Doctoral Dissertation. University of Valladolid (1993).
Vigo-Aguiar, J. and Ferrándiz, J.M.: Higher-order varible-step algorithms adap-ted to the accurate numerical integration of perturbed oscillators. Computer inPhysics, vol 12, (1998), 467.
Vigo-Aguiar, J. and Ferrándiz, J.M.: A General Procedure for the Adaptationof Multistep Algorithms to the Integration of Oscillatory Problems. SIAM J. ofNumerical Analysis. vol 35 no 4 (1998), 1.684.
Vigo-Aguiar, J. An Approach to Variable Coe¢cients Methods for Special Di¤e-rential Equations. International Journal of Applied Mathematics Ed AcademicPub. vol 1 no 8 (1999), 168.
Vigo-Aguiar, J. and Ferrándiz, J.M.: Implementation of Bettis algorithms forthe numerical integration of perturbed oscillating systems. Computational Phy-sics Ed Word Scienti…c (1993). 349
Vigo-Aguiar, J. and Ferrándiz, J.M.: VSVO Adapted Multistep Methods for theNumerical Integration of Second Order Di¤erential Equations. Applied Mathe-matics Letters vol 11 no3 (1998), 83.

144
Walz, G.: Approximation von Funktionen durch asymptotische Entwicklungenund Eliminationsprozeduren. Dissertation. Universität Mannheim. (1987).
Walz, G.: Computing the matrix exponential and other matrix functions. Jour-nal of Computational and Applied Mathematics. North-Holland 21, (1988), 119
Zill, D.G.: Ecuaciones Diferenciales. Ed. International, Thomson Editores,(1997).