inputs - maxim integrated
TRANSCRIPT

2
3
8 9
? 16
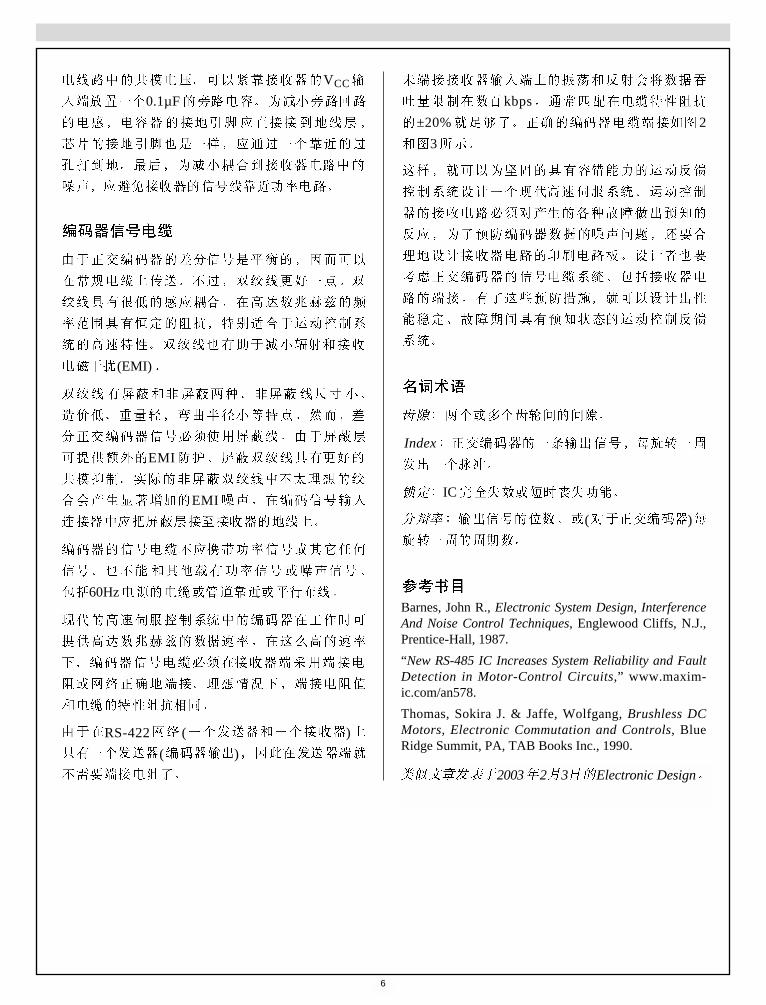
3
MOVINGMACHINE ARM
VELOCITY ENCODER
3-PHASE AC POWER
LEAD SCREW
POSITIONENCODER
MOTION-CONTROLLER
MODULEDRIVER
ORAMPLIFIER
DCBRUSHLESS
MOTOR
GEARBOX
ENCODERINPUTS

MAXIM 2003
Maxim Integrated Products, Inc. (MXIM) 2003 3 29 286.2
258.5 10.7% 2003 77.6
66.7 16.3% 77.1 0.7%
( 322.9
Treasury Stock Method 19.0 ) 0.23 0.19 21.1% 2003
20.0 650,000 6.5
8.6 111.0 4.2 123.8
308 271 14% 165
139 19% (
) 2001
4.6 41%
5% 14 12
14 11 10%
12 219 196 2003
12 201 177
2003
Jack Gifford
Dallas Semiconductor
Gifford
0.02 0.04 2003 5 30 2003 5 12
Gifford Maxim
Treasury Stock Method
15
News Brief

24
1
(
)
8
DSP
ASIC
( )
• ( )
•
•
6 RS-422/RS-485
(A A B B INDEX INDEX)
RS-422
( RS-422
)
RS-422 RS-485
www.maxim-ic.com/an736 RS-485
(EIA/TIA-485) Differential Data Transmission System
Basics
ESD 7
2
U1 10Mbps 5V RS-422/
RS-485 ±15kV ESD
3
1.
MOVINGMACHINE ARM
VELOCITY ENCODER
3-PHASE AC POWER
LEAD SCREW
POSITIONENCODER
MOTION-CONTROLLER
MODULEDRIVER
ORAMPLIFIER
DCBRUSHLESS
MOTOR
GEARBOX
ENCODERINPUTS

ESD ESD
150Ω(
)
MAX3095 1kΩA B
200mV
ESD
( 3) 2 IC
RS-422/RS-485
±15kV ESD 32Mbps
MAX3098E
ALARMA ALARMB
ALARMZ
C_DELAY ALARMD
(ALARMA ALARMB ALARMZ )
4
2. ESD ( MAX3095)
A1
B1
A2
B2
A3
B3
A4
B4
VCC
G
G
Y1
Y2
Y3
Y4
GND
2
1
6
7
10
9
14
15
2
1
6
7
10
9
14
15
A
A
GNDGND
B
A
A
GNDGND
OTHERINPUTS
ENCODER 1INPUT
TERMINALS
A1
B1
A2
B2
A3
B3
A4
B4
VCC
G
G
Y1
Y2
Y3
Y4
GND
B
II
BB
II
ENCODER 2INPUT
TERMINALS
MAX3095
MAX3095
1kΩ
150Ω
1kΩ1kΩ
150Ω
1kΩ1kΩ
150Ω
1kΩ1kΩ
150Ω
1kΩ1kΩ
150Ω
1kΩ
+5V
+5V
+5V
+5V
+5V
1kΩ
150Ω
1kΩ
+5V
+5V
+5V
16
4
12
3
51113
8
16
4
12
3
51113
8
MOTION-CONTROLLER
MODULE INPUTTERMINAL
TOOTHER
ENCODERINPUT
RESISTORS
ENCODER 1RECEIVEROUTPUTS
0.1µF6.3V
0.1µF6.3V
ENCODER 2RECEIVEROUTPUTS
OTHERENCODERRECEIVEROUTPUTS
MOTION-CONTROLLER ICOR DSP OR ASIC
NOTE: I = INDEX I = INDEX

120Ω RS-422
IC 16 QSOP
RS-422
A/A B/B INDEX/INDEX
4
RS-422
5
4.
MAX3098 RS-422/RS-485
ALARMA
TO VCC
ALARMB
ALARMZ
ALARM
G
NOTE: I = INDEX I = INDEXG = GROUNDALL COMPONENTS ARE SURFACE MOUNT
A
G A
G B
G B
G I
G I
MAX3098E ENCODERRECEIVEROUTPUTS
C_DELAY
VIA TO GROUND PHONE
DIRECT VIAS TOGROUND PLANE
MOTION-CONTROLLERMODULE ENCODERINPUT TERMINAL 120Ω TERMINATING RESISTORS
TOP LAYER COPPERTRACES (TYPICAL)
0.1µF
SOLID GROUND PLANEON NEXT LAYER
3. 2 ESD /
A
A
GNDGND
B
A
A
GNDGND
OTHERINPUTS
ENCODER 1INPUT
TERMINALS B
II
BB
II
ENCODER 2INPUT
TERMINALS
C_DELAY
120Ω
120Ω
120Ω
MOTION-CONTROLLER
MODULE INPUTTERMINAL
A
A
B
B
Z
Z
GND
DELAY
VCC
OUTA
OUTB
OUTZ
ALARMA
ALARMB
ALARMZ
ALARMD
1
2
3
45
6
7
8
16
14
12
10
15
13
11
9
ENCODER 2RECEIVEROUTPUTS
TO ALARM/FAULT CONTROL CIRCUIT
MOTION-CONTROLLER ICOR DSP OR ASIC
+5V0.1µF6.3V
MAX3098E
MAX3098E
C_DELAY
120Ω
120Ω
120Ω
A
A
B
B
Z
Z
GND
DELAY
VCC
OUTA
OUTB
OUTZ
ALARMA
ALARMB
ALARMZ
ALARMD
1
2
3
45
6
7
8
16
14
12
10
15
13
11
9
ENCODER 1RECEIVEROUTPUTS
TO ALARM/FAULT CONTROL CIRCUIT
MOTION-CONTROLLER ICOR DSP OR ASIC
+5V0.1µF6.3V
VCC
0.1µF
(EMI)
EMI
EMI
60Hz
RS-422 ( )
( )
kbps
±20% 2
3
Index
IC
( )
Barnes, John R., Electronic System Design, InterferenceAnd Noise Control Techniques, Englewood Cliffs, N.J.,Prentice-Hall, 1987.
“New RS-485 IC Increases System Reliability and FaultDetection in Motor-Control Circuits,” www.maxim-ic.com/an578.
Thomas, Sokira J. & Jaffe, Wolfgang, Brushless DCMotors, Electronic Commutation and Controls, BlueRidge Summit, PA, TAB Books Inc., 1990.
6
2003 2 3 Electronic Design

7
/
/
(EMI) (RFI) /
( )
•
• PWM dv/dt
•
• 60Hz SCR TRIAC
•
•
( )
(376.7Ω)
376.7ΩEMI
( )
(
)
60Hz
(ESD) IC
ESD
ESD IC IC
IC
IC
ESD
ESD
TransZorbs ESD IC

8
(
)
5V 24V
RS-422
A B Z
A B
90° ( 1/4
) A B
Z
360°
A B RS-422
A B Z
BCD
13
(1200 RPM 12 600 RPM 13 )
360°
3 A B
1° 2°
(LDT)
/
LDT
LDT
A B Z
8
8 8051 68HC11
Atmel® AVR® PIC
PC-104 StrongARM
RAM
Joe Security Service
ID
Joe
Joe Alex Security Central
8 RISC
Joe
Harvard
TCP/IP
40kB 60kB
Joe Harvard 8
Joe Troy X-Treme Security
Troy
Joe Troy
Troy
Joe Amiga Amiga Joe
Joe (
) Troy
Pocket PC StrongARM
I/O Joe
Linux Pocket PC
Joe
32
Joe Joe
Alex Troy
TINI®
TINI Dallas Semiconductor
TINI
PC TCP/IP TINI TINI
TINI
1-Wire® 2 RS-232
CAN SPITM
IPv4 IPv6 DNS DHCP PPP Telnet
FTP
9
Atmel AVR Atmel Corp.TINI 1-Wire Dallas SemiconductorSPI Motorola, Inc.
T I N I
DS80C390 TINIm390 TINIm390 72
SIMM 512kB 512kB
1MB SRAM
DS80C400 TINIm400
TINIm400 144 SO DIMM MAC
DS80C400 TINIm400
TINIm390
390 400 8 8051
4
12
8051 3
390 4MB
4MB 400 16MB
390
40MHz 400
75MHz
8
16 /32
TINI Dallas
JavaTM
512kB OS
64kB
DS80C400 ROM
C
TINI
DS80C400
( 1) TINIm400
UDP
PC PC
HTTP Java applet
OmniVision 5017 CMOS
M4088 384 x 288
8 4
5017
50 /
400 73MHz (18.4MHz x 4)
400 MAC
PHY 400 PHY
HomePNA HomePlug PHY
Intel® LXT972A MII 400
( 2) PHY 25MHz
12ns
Hitachi HM62W8511H
SRAM
TINI
SRAM
TINIm400
TINIOS
TINI
TINIOS DS2502 MAC
MAC I2CTM
DS1672 TINI
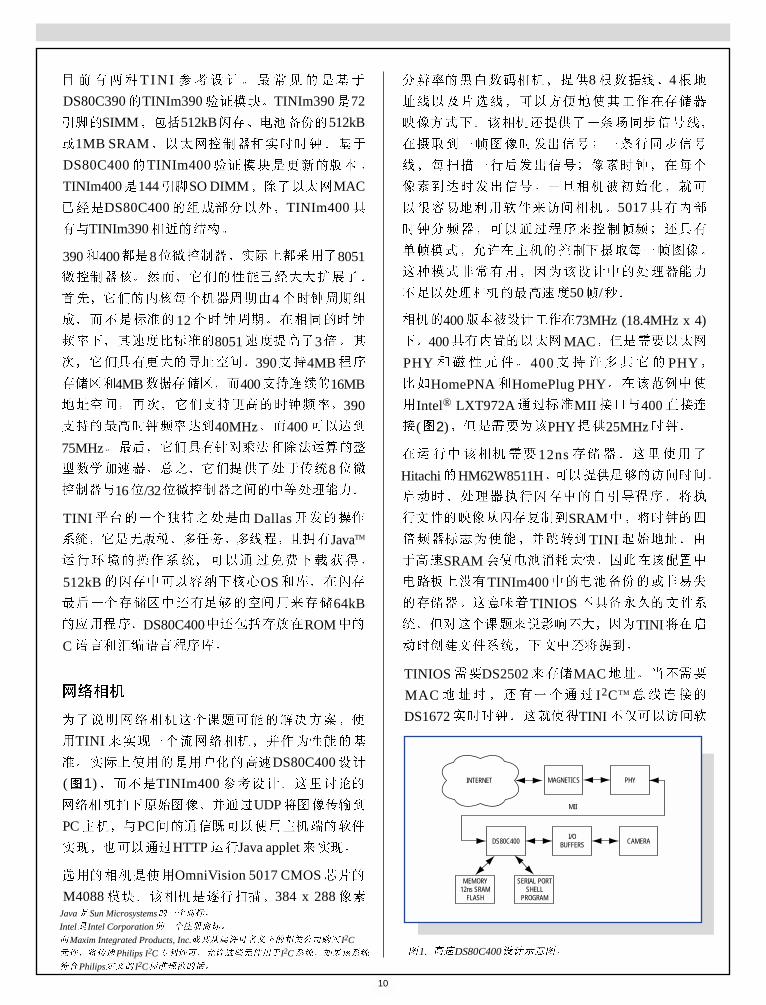
10
1. DS80C400
INTERNET MAGNETICS PHY
DS80C400
MII
I/OBUFFERS
MEMORY12ns SRAM
FLASH
CAMERA
SERIAL PORTSHELL
PROGRAM
Java Sun Microsystems
Intel Intel Corporation
Maxim Integrated Products, Inc. I2C
Philips I2C I2C
Philips I2C

TINIOS
A0–A3 D0–D8 WEB
CE4 CSB
0 x 800000 VSYNC P1.1
PSEN OEB
INT1 HREF
TINI SDK Dallas
Semiconductor
Java
TINI
TINI —
( HTTP) Java
8051
TINI JDK 1.1
java.io
java.lang
java.net
java.util
javax.comm
TINI JVM PC JVM
TINI
TINI
11
2. DS80C400 MII PHY
GND
GND
GND
GND
GND GND
GND
AGNDAGND
RECEIVERSTATUS
D4 220Ω
C49 C50 C53 C54
VCC
R20
R3
0Ω
GND
LINKSTATUS
D4 220Ω
R19
GND
LINKSPEED
D4 220Ω
R18
.01µF .01µF.01µF.01µF
RD+
RDCT
RD-
RX+ 116
R16
R17
51 40 8 21 22 CRS, COL, TXEN, TXCLK, RXER, RXCLK, RXDV, MDC, MDIO
TXD.C0..31,RXD.C0..3]
AGND
Z1 Z2
BEADBEAD
U14LXT972ALC
VCCVCC
47Ω
495352
RXDVRXERRXCLKTXFN
TXCLK
CD1CRSMDCMDIO
565455
6263
3434264
GND19202324
47Ω
11
109
M1
1514
1234567
J12
3
678
GND
GND
C20.001µF, 2kV
C16.01µF
C17.01µF
C15270pF
C14270pF
R849.9Ω 1%
R949.9Ω 1%
C19.001µF, 2kV
RXCT
RX-
TD+
TDCT
TD-
TX+
TXCT
TX-
S558-5999-T7
C210.01µF
C22.01µF
C23.01µF
C24.01µF
RESET*
TXD.3TXD.2TXD.1TXD.0
TXD3TXD2TXD1
LED/CFG1LED/CFG2LED/CFG3
TXSLEW0
VCCI
OVC
CIO
VCCA
VCCA
VCCD
TXSLEW1
TEST0TEST1
RESET\
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
ADDR0
RBIAS
PAUSE
PWRDWN
REFCLK/XIXO
TXD0
RDX3RDX2RDX2RDX0
RX_DVRX_ER
RX_CLKTX_ENTX_ER
MDOISMDCMDIO
MDINT\
TPOPTPONTPIPTPIN
TSITDOTMSTCKTRST\
TX_CLK
COLCRS
60595857
RXD.3RXD.2RXD.1RXD.0
45464748
56
4
2
17
33
3435
39
12
2728293031
383736
22.1kΩ
R7

64kB
63
64kB 8
32
1.1 JDK IPv6
TINI 1.4 JDK
Java TINI
com.dalsemi.comm
com.dalsemi.fs
com.dalsemi.system
com.dalsemi.tininet
CAN I2C TINI
TINI SDK
(3kB .class ) HTTP
3
FRCTL 400
10 / 384 x 288 1080kB/s
8051
movx 8051
mov R0,#LOW(MEMORY_LOW)mov R1,#HIGH(MEMORY_HIGH)
camera_loop:;
; Move the camera address into the data pointer.;
mov dptr,#CAMERA_ADDRESS;; Move the data into the accumulator.;
movx a,@dptr; ; Move to the address we will be writing to. Since; this will increment every time, we will keepit stored; in registers. We will also need to move it onebyte at; a time using the DPL and DPH SFRs.;
mov dpl,R0
mov dph,R1;; Write the accumulator to the address
movx @dptr,a;; Increment the data pointer and store back inR0 and R1.;
inc dptrmov R0, dplmov R1, dph; Do the loop again...
DS80C400
;; Set up the data pointers. We use the DPSregister to select; what data pointer we want to use. A datapointer move allows; for a 24-bit address to be loaded directly.;
mov dps,#0mov dptr,#CAMERA_ADDRESS
mov dps,#1mov dptr,#MEM_ADDRES
; ; Set data pointer 0 as the current data pointer.
mov dps,#0camera_loop:;; Read from data pointer zero.;
movx a,@dptr;; Switch to the next data pointer. Note that doing ; an inc on this register only affects the data ; pointer-selection bit. This allows one cycletoggling; from one data pointer to another.;
inc dps;; Store the data and increment the address.;
movx @dptr,a
12
3. TINI
HTTP SERVER CAMERA SERVER CASH
JVMNATIVE METHODS
CAMERA ISR NETWORK

inc dptr;; Switch back to the first data pointer.;
inc dps;; Do the loop again...;
DS80C400
; ; Set the base address of data pointer zero.;
mov dps,#0mov dptr,#ADDRESS1
;; Set the base address of data pointer one.
mov dps, #1mov dptr,#ADDRESS2
;; Enable autoselection and autoincrement.;
mov dps, #(DPS_AID | DPS_TSL)memory_loop:;; Read from data pointer 0, increment the; data pointer, and toggle the selection bit; in one instruction.;
movx a,@dptr;; Write to data pointer 1, increment the data pointer,; and toggle the selection bit in one instruc-tion.
;movx @dptr,a
; Loop...
HSYNC
HSYNC ISR
384 x 288
Joe
240 x 180
4
HSYNC
100ms
3/5 CPU
95kB
Java
Java
ISR Java
TINI TINI
(TNI) Java
TINIOS API
Java
TINI (TLIB) Java
TLIB TINI
Java
public static final int IMAGE_BUFFER_0 = 0;public static final int IMAGE_BUFFER_1 = 1;
/**takePhoto takes a photograph and stores it in the memory.@param buffer Species what image buffer to use.Use IMAGE_BUFFER_0 or IMAGE_BUFFER_1*/
13
4. HSYNC A384 B 192
1
2 3
B A
A 1 2 3
B 1 2 3

static native void takePhoto(int buffer);
/**getScanlines pulls a fixed number of scanlines out of the memory buffer. This allows the Java applicationthe ability to work with fixed pieces of the
image.
@param start first scanline to copy from.@param end last scanline to copy from@param offset offset into the data array to
copy to@param data array to copy into@param buffer selects the image buffer to read
from. Useful IMAGE_BUFFER_0 or IMAGE_BUFFER_1*/public static native int getScanlines(int
start, int end , int offset, byte []data, intbuffer);
takePhoto
Java
ISR TINIOS
TINIOS
4ms
Java
Java
getScanlines
Java
TINI
512kB 7
1
HTTP web
Java applet applet
applet
Java
Java applet
applet
/**Extracts the sample jar file from the native
library. The demo application had a jar fileembedded inside the native library.This allowed the jar file, the application, andthe native library all to be embedded in flashformat.
@param dummy Array to copy jar image into.Must be of greater size than that specified ingetJarFileSize()
*/static native void getJarFile(byte []dummy);
/**Gets the size of the embedded jar file*/static native int getJarFileSize();
HTTP HTTP
TINI SDK HTTP HTTP
servelet cgi-bin
TINI
TINI
applet
index.html
42877 TCP
applet
PCsockpuppet = new ServerSocket(42877);
IPv4 IPv6
IPv6 IPv6
PC
‘A’ ‘D’
IP
sock = sockpuppet.accept();ch = (char)sock.getInputStream().read();
switch (ch)case 'A':
cwt.addAddress(sock.getInetAddress());break;
14
case 'D':
cwt.removeAddress(sock.getInetAddress());break;
sock.close();
UDP
CPU 50%
Java// // Notify the camera thread we are ready for// the next frame.//synchronized(stopper)
stopper.notify();
2 5
1 5
CAmera SHell CASH
IP
TINI SDK Slush
CASH
IP
web
applet
TINIOS 24
4
Java
applet
200kB/s
4.5
DS80C400
web
Joe TINI
Joe
Troy
Joe Alex
Amiga Troy Joe Joe
Joe Amiga
8
Linux PC-104 Pocket PC
32
TCP/IP
TINI DS80C400
TCP/IP
Java
Joe
2003 2 Embedded Control
Europe
15

?
(THD)
DAC
1.00kΩ10V 1.01kΩ
( )
•
• (DA)
• (ESR)
•
• ( µF )
1% 2%
( )
RC ( 1)
-3dB
ESR
ESR
-3dB
-3dB THD
—
-3dB 1kHz
16
1. RC
VOUTVIN
C
R
(Audio Precision System
One)
THD+N
1µF 150Ω1kHz
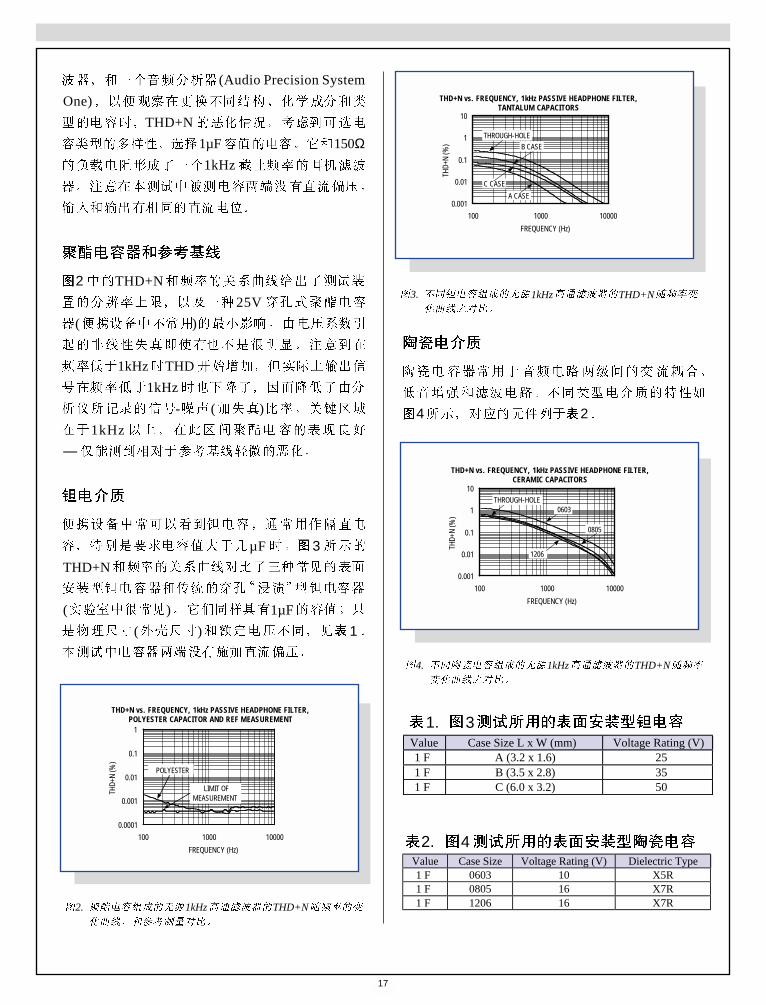
2 THD+N
25V
( )
1kHz THD
1kHz
- ( )
1kHz
—
µF 3
THD+N
( ) 1µF
( ) 1
4 2
3. 1kHz THD+N
0.001
0.01
0.1
1
10
100 1000 10000
FREQUENCY (Hz)
THD+
N (%
)
THROUGH-HOLEB CASE
A CASE
C CASE
THD+N vs. FREQUENCY, 1kHz PASSIVE HEADPHONE FILTER,TANTALUM CAPACITORS
17
2. 1kHz THD+N
0.0001
0.001
0.01
0.1
1
100 1000 10000
FREQUENCY (Hz)
THD+
N (%
)
LIMIT OF MEASUREMENT
POLYESTER
THD+N vs. FREQUENCY, 1kHz PASSIVE HEADPHONE FILTER,POLYESTER CAPACITOR AND REF MEASUREMENT
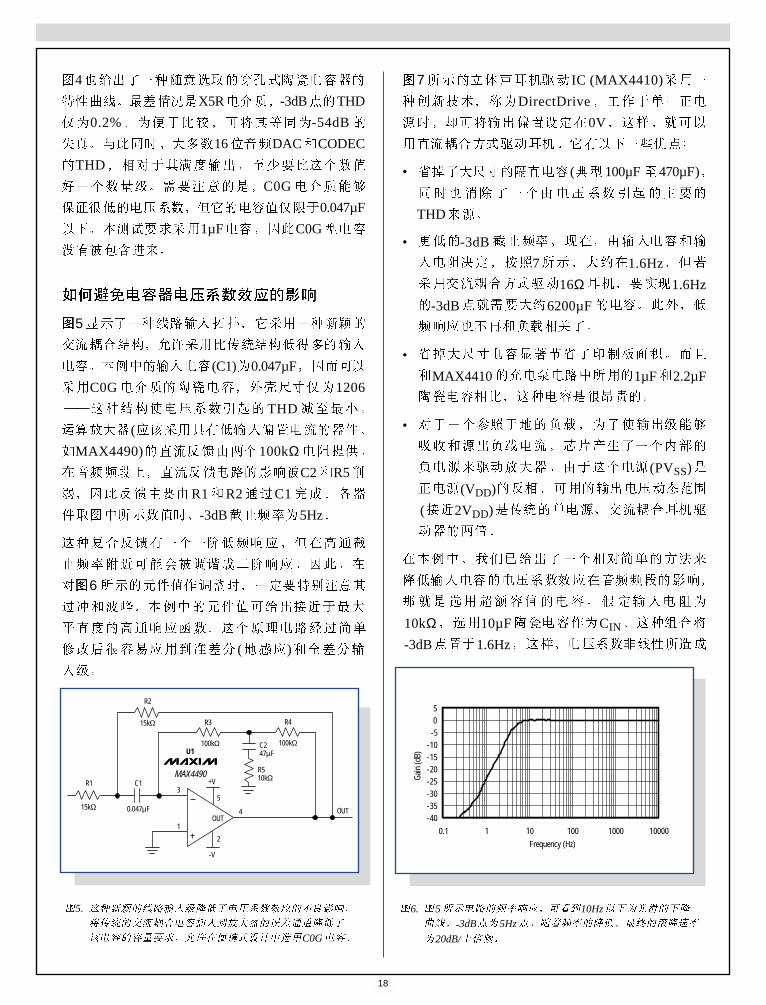
4. 1kHz THD+N
0.001
0.01
0.1
1
10
100 1000 10000
FREQUENCY (Hz)
THD+
N (%
)
0603
0805
1206
THROUGH-HOLE
THD+N vs. FREQUENCY, 1kHz PASSIVE HEADPHONE FILTER,CERAMIC CAPACITORS
Value Case Size Voltage Rating (V) Dielectric Type1 F 0603 10 X5R1 F 0805 16 X7R1 F 1206 16 X7R
2. 4
Value Case Size L x W (mm) Voltage Rating (V)1 F A (3.2 x 1.6) 251 F B (3.5 x 2.8) 351 F C (6.0 x 3.2) 50
1. 3
4
X5R -3dB THD
0.2% -54dB
16 DAC CODEC
THD
C0G
0.047µF
1µF C0G
5
(C1) 0.047µF
C0G 1206
THD
(
MAX4490) 100kΩC2 R5
R1 R2 C1
-3dB 5Hz
6
( )
7 IC (MAX4410)
DirectDrive
0V
• ( 100µF 470µF)
THD
• -3dB
7 1.6Hz
16Ω 1.6Hz
-3dB 6200µF
•
MAX4410 1µF 2.2µF
•
(PVSS)
(VDD)
( 2VDD)
10kΩ 10µF CIN
-3dB 1.6Hz
18
5.
C0G
C1
0.047µF
R2
15kΩ
R1
15kΩ
3
1
4
5
2
-V
+V
OUT
10kΩR5
47µFC2
R4R3
100kΩ 100kΩ
MAX4490
OUT
U1
6. 5 10Hz
-3dB 5Hz
20dB/
-40-35-30-25-20-15-10
-505
0.1 1 10 100 1000 10000Frequency (Hz)
Gain
(dB)

8
100µF 16Ω100Hz -3dB
THD 100µF
-3dB THD+N 0.2%
4 Maxim
DirectDrive
8 MAX4410 ( )
THD X5R
THD
DirectDrive ( MAX4410)
C0G PPS
-3dB 10
19
7. MAX4410 CIN 10µF
CHARGEPUMP
UVLO/SHUTDOWNCONTROL
CLICK-AND-POPSUPPRESSION
C1N
C1P
PVSS SVSS PGND SGND
PVDD SVDD SHDNL SHDNR
SVSS
SVDD
SGND
INL
INR
OUTR
LEFTCHANNELAUDIO IN
RIGHTCHANNELAUDIO IN
HEADPHONEJACK
1(B2)
2(A3)
3(A4)
4(B4)
5(C4)
6(D4)
7(D3)
8(D2)
9(D1)
10(C1)
11(C2)
12(B1)
14(A2)
MAX4410
C12.2µF
C22.2µF
( ) DENOTE BUMPS FOR UCSP.
1.8V TO 3.6V
C32.2µF
CIN10µF
RIN10kΩ
RF10kΩ
SVSS
SVDD
SGND
OUTL
CIN10µF
RIN10kΩ
RF10kΩ
13(A1)
8. 100µF 16Ω THD+N( ) 100Hz -3dB
THD Maxim DirectDrive
0.001
0.01
0.1
1
10
10 100 1000
FREQUENCY (Hz)
THD+
N (%
)
TANTALUM
THD+N vs. FREQUENCY, 1kHz PASSIVE HEADPHONE FILTER, ELECTROLYTIC AND TANTAULM 100µF CAPACITORS
ALUMINUM ELECTROLYTIC
LIMIT OF MEASUREMENT

www.maxim-ic.com
010-62010298www.maxim-ic.com.cn
www.maxim-ic.com.cn/sample.htmwww.maxim-ic.com.cn/technical.htm8008100310 010-62010598
8328 100083
24
Maxim/Dallas
Maxim/Dallas
Maxim/Dallas CD-ROM
( )
____________________________________ / ____________________________
____________________________________ __________________________________
____________________________________________________________________________
____________________________________ __________________________________
____________________________________
____________________________________
________________________________________________________________________
/ ____________________________ ____________ /
( 3 )
EJ48 9/03
MAXIM 800 810 0310
010-6201 0598010-6201 0298
SOLOMON QCE INGRAM MICRO ( ) AVNET010-68408123 ( ) 68408125 ( ) 010-82644888 ( ) 82644333( ) 010-64413113 ( ) 64438260 ( )021-68867026 ( ) 68867217 ( ) 021-64435555 ( ) 64433355( ) 021-52062288 ( ) 52062299 ( )0755-83782626 ( ) 83781753 ( ) 0755-83663721 ( ) 83663027( ) 0755-83781886 ( ) 83780079 ( )028-85535552 ( ) 85593712 ( ) 028-85557111 ( ) 85535201( ) 852-21765388 ( ) 27902182 ( )025-6899420 ( ) 6899419 ( ) 027-87272022 ( ) 87275076( )852-24934202 ( ) 24136307 ( ) 852-27411212 ( ) 27418552( )