info2 prof. j. walter info-numerische.mht stand: dezember 2003 seite 1 numerische verarbeitung...
TRANSCRIPT

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 1
Numerische Verarbeitung digitaler Signale
Glätten
• drei gemessene Werteyn-1, yn, yn+1
linearer Mittelwert
Aus einem Satz von N Messwerten erhält man N-2 geglättete Werte
3
yyyy 1nn1-n
n
ny
info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 2
Zweimaliges Glätten
)yy2y3y2y(9
13
yyyy
2n1nn1-n2-n
1nn1-nn

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 3
Beispiel: Messwerte Tabelle 1: „Numerische“
n yn aus unsym. Ausgleichsf.
1 5 - - 4,94
2 5,4 5,63 - 5,63
3 6,5 5,97 5,88 6,15
4 6,0 6,07 6,02 6,09
5 5,7 6,03 6,14 5,87
6 6,4 6,33 6,39 6,30
7 6,9 6,80 6,88 6,82
8 7,1 7,26 7,18 7,30
9 7,8 7,47 - 7,67
10 7,5 - - 7,53
nyny ny

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 4
Ausgleichsgerade
Bsp.:
durch folgende 5 Messpaare xn,yn wird ein Ausgleichspolynom 1. Ordnung gelegt.
N 1 2 3 4 5
xn 1 2 3 4 5
yn 1 2 3 3 4
Ausgleichspolynom f(x)=P(x)
Polynom 1. Ordnung
f(x)=a+bx

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 5
Gauß‘sches Prinzip der kleinsten Quadrate
!)²)((
!)²)((
1
1
MinyxfS
MinyxPS
N
nn
N
nn
:Ansatz
. b
b a
X
y
xn xn+1
yn
yn+1
Streng genommen: senkrechter Abstand muss minimiert werden
Praxis: Abzisse wird fehlerfrei angenommen
minimiert wird Ordinaten-Differenz f(x)-yn

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 6
nn
nnnn
N
n
N
n
N
nnn
nnn
N
n
nn
N
n
nn
yxbaN
xyxbxa
yxba
xybxab
S
ybxaa
S
MinybxaS
:3 aus
4 ² :2 aus
3 :1 aus
2 0)(2
1 01)(2
! )²(
1 1 1
1
1
5 N
xbya nn
*
Herleitung Gauß‘sches Fehlerquadrat

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 7
nnnnnnn yxxb
N
xxb
N
xy ²*
*
:4 in 5
N
xxx
N
yxyx
bnn
n
nnnn
²
Gauß‘sches Fehlerquadrat
5 N
xbya nn
*

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 8
Zum Beispiel
xxy
b
yx
yxx
nn
N
n
N
nnn
N
nn
7,05,0)(
5,05
15*7,0137,0
515*15
55
513*15
46
46
1355²151 11
a
Ausgleichsgerade durch 5 Punkte

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 9
Skizze: Ausgleichspolynom
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
0 1 2 3 4 5 6
Reihe1
Reihe2

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 10
Ausgleichspolynom 3.Ordnung durch 5 Punkte
ny
xn-2 xn-1 xn xn+
1
xn+
2
(xn, ) geglätteter Wert / wahrscheinlichere Wert
n
Stützstellen k = -2, -1, 0, 1, 2
(xn+k, yn+k)

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 11
Polynom 3. Ordnung
hxxd
S
c
S
b
S
a
S
MinyxPS
xxdxxcxxbaxP
nn
knk
kn
nknnknnknkn
1
2
2
, , ,
! ]²)([
)³()²()()(

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 12
4 Gleichungen
nnnn
nn
knkkkkk
knkkkkk
knkkkkk
knkkk
xkxxaxP
hk
hk
k
hk
hxxxk
yxxdxcxbxa
yxxdxcxbxa
yxxdxcxbxa
yxdxcxba
für 0 0)( da )(
2 2
1
0 0
1
2 2
4
3
2
1 5
0
22
36543
25432
322
32

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 13
)31217123(35
12112 nnnnnn yyyyyy
aus (1) und (3) folgt:
Die ersten beiden und die letzten beiden Punkte wurden nicht geglättet.
knkn yxP )(
Ausgleichspolynom
info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 14
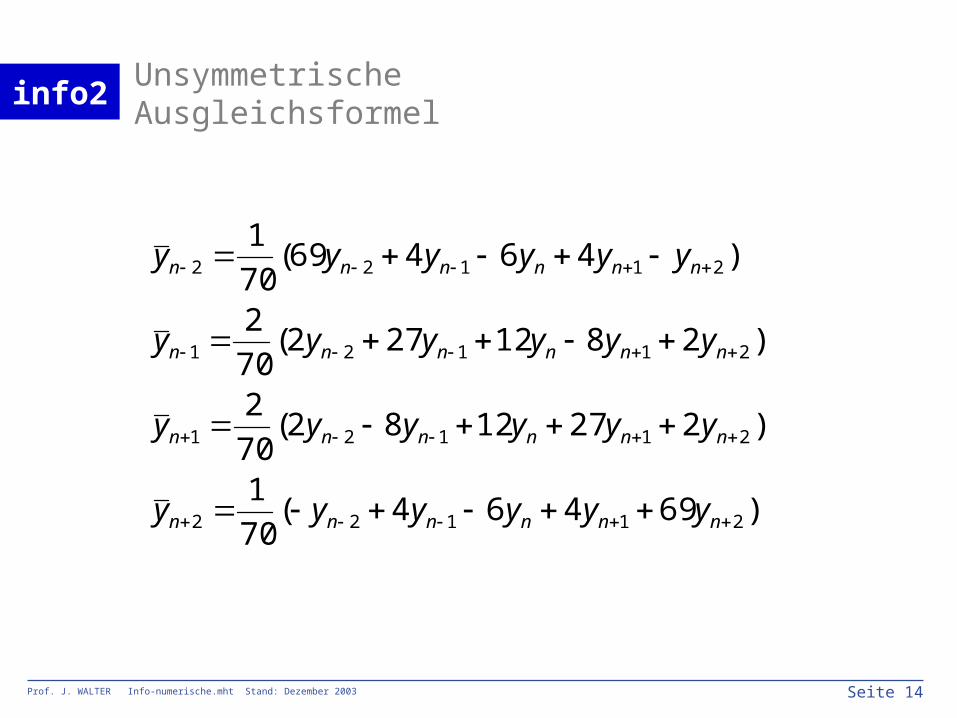
Unsymmetrische Ausgleichsformel
)69464(70
1
)2271282(70
2
)2812272(70
2
)46469(70
1
21122
21121
21121
21122
nnnnnn
nnnnnn
nnnnnn
nnnnnn
yyyyyy
yyyyyy
yyyyyy
yyyyyy

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 15
Differenzenquotient
Messweite yn Variable xn
Äquidistanter Abstan xn+1-xn=hAus Taylorreihe folgt:
hyyy
hyyy
hyyy
xxn
xf
xxxf
xxxf
xfxf
nnn
nnn
nnn
n
n
n
'11
'1
'1
00
0)(
20
00
00
2
)(!
)(
............)(!2
)('')(
!1
)(')()(
h
yyy nn
n 211'
Differenzenquotient aus den zu (xn,yn)benachbarten Stellen

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 16
Taylor‘sche Satz
satzMittelwert nach 1...0
)(!
)()!1(
)...(''!2
²)('
!1)()(
)()1(1
hafn
haf
n
h
afh
afh
afhaf
nn
nn

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 17
Quadraturformeln - Integrieren
• Der Name Quadraturformel stammt vom Delischen Problem der Quadratur des Kreises
• Quadraturformeln, ermöglichen die numerische Berechnung von Flächeninhalten.
• Visualisierung zur numerischen Integration

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 18
Integrieren
Fläche :gesucht
enStützstell N von Satz
nxx
yx
nn
nn
1
),(
x1 x2 x3 x4 x5 xNx
y
N
nnN yhR
2
*
Gesamtfläche

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 19
Trapezregel
2* 1 nn
n
yyhA
0 Tmit N bis 2i nTeilfläche 1
2* 1
1ii
ii
yyhTT
x1 x2 x3 x4 x5 xN
y1
y2
A2 A3
h
)22
(*1
2
1 NN
nnN
yy
yhT
Formel für Trapezfläche
Gesamtfläche:

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 20
Keplersche Fassregel
• Durch 3 Stützstellen wird Polynom 2.Ordnung gelegt Integrationsintervall von 2h
x1 x2 x3
y1
h0 2h

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 21
Herleitung Kepler‘sche Fassregel
e Unbekannt3 n Gleichunge 3
42)2(
)(
)0(
)(
23
22
1
2
hchbayhy
hchbayhy
ayy
cxbxaxy
)2(²2
1
)3
1
3
4(
2
3
321
321
1
yyyh
c
yyyh
b
ya
³3
8²22
)²()(2
0
2
0
chbhahK
dxcxbxadxxyKh h
Übung

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 22
Keplersche Fassregel
6
42 321
2
yyyhK
2 Streifen
Bemerkung:
Bei gerader Zahl von Messwerten: Simpson-Regel

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 23
Simpson-Regel
mit 2
3-N bis 0mfür
und zwischen
23-N
bis 0mfür
nintegriere Streifen zwei
ungerade und 3N
0
...
)...424(6
2
)4(6
2
0222
2242
32432122
32122
32221222
SkS
kkk
yyyyyh
S
yyS
yyyh
k
mm
m
mm
mm
mmmm

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 24
3/8-Regel
Polynom 3.Ordnung 3 Streifeny(x)=a+bx+cx²+dx³
x1 x2 x3
y1
h0 2h
x4
3h
A38
333 4321
3
yyyyhA
drei Streifen

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 25
Newton-Cotes-Formeln
4. Ordnung
90
732123274 54321 yyyyy
hA

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 26
Beurteilung der Integrationsverfahren
• Welche Verfahren wird man in der Praxis einsetzen?
• Abwägung: Speicherplatz – Prozessorleistung• Früher waren Speicherplatz und schnelle A/D-
Wandler teuer ->Prozessor + SW• Heute: Integrationsintervall klein ->
Rechteckregel• Übung: www.mathematik.ch/anwendungenmath/numint • Anzahl der Intervalle vergrößern.

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 27
Numerische Integration-gewöhnliche Differentialgleichungen
)(
)())(,()(
))(,()()(
))(,(
)())(,()()(
1101
01
00
1
0
1
0
1
0
1
0
nn
t
t
t
t
t
t
t
t
tyydy
tyydttytfyty
dttytftyty
dttytfdty
tth
ytytytftydt
tdy
Fehler
:tAnfangswer
DGL Homogene
n1n
Lösbar mit Kepler Fassregel

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 28
Inhomogene DGL
1
1
0
1
0
1
0
))(),((
))(),(()(
))(),((
))(),(()(
1
01
n
n
t
t
nn
t
t
t
t
t
t
dttytxfyy
dttytxfyty
dttytxfdty
tytxfty
DGLx(t) y(t)
ersetzenzu durch
ist DGLhomogenen Bei
0
0
hntt
hnxx)x(t
n
nn

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 29
Herleitung: DGL aus Frequenzbereich
• Aufstellung der Gleichungen
R
y(t)Cx(t)
CRjCj
R
CjUe
Ua
1
11
1
)()(
)()(
txtUe
tytUa

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 30
Herleitung über Fourierbereich
)()(
)()()(
1)1()(
1
11
1
tytyj
txCRtyty
UeCRjty
CRjCj
R
CjUe
Ua

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 31
Polygonzugverfahren nach Euler
(1) ),(1 hyyyxfyy nnnnnn
R
y(t)Cx(t)
)1()()(
DGLder Lösung eanalytisch
)()()(
)()()(
Tiefpassfür
T
t
etxty
T
tytxty
txtyRCty
DGL
nn
nn
nn
yty
xtx
yty
)(
)(
)(
erendiskretisi DGL
T
yxhyy
T
tytxty
nnnn
1
(1)in )()(
)(

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 32
Übung: Vergleich „Analytisch – Numerisch“
• Stellen Sie die beiden Kurven in Excel dar.• Eingangsfunktion x[n]=1 für 0≤t
x[n]=0 für 0>t • RC=1; h=0,1• Bereich 0…7

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 33
Explizites Polygonzugverfahren - Euler
0y 0y
y0
y(t1)
y1
t0t1
y(t)
h
h*
dtnnn yhyy 1
Steigung an der linken Grenze
info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 34
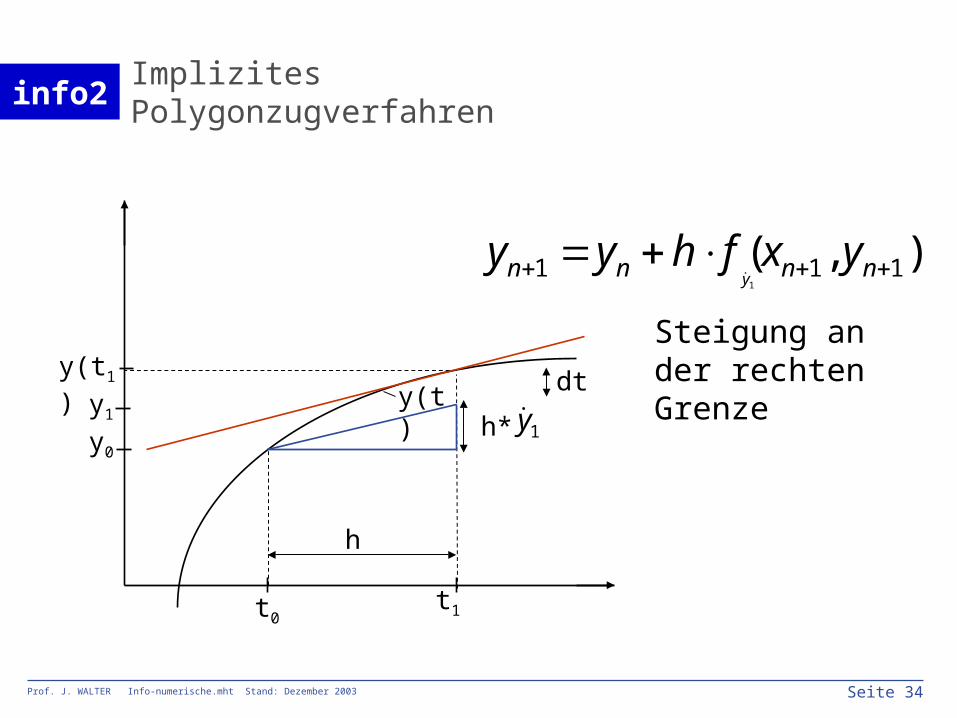
Implizites Polygonzugverfahren
1yy0
y(t1)y1
t0t1
y(t)
h
h*
dt
),( 111 nnnn yxfhyy
Steigung an der rechten Grenze
1y

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 35
Trapezverfahren nach Heun
),(),(2
))(),(()(
111
01
1
0
nnnnnn
t
t
yxfyxfn
yy
dttytxfyty
0yy0
h
t0t1
210 yy
t
Integration einer DGL nach Trapezverfahren
info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 36
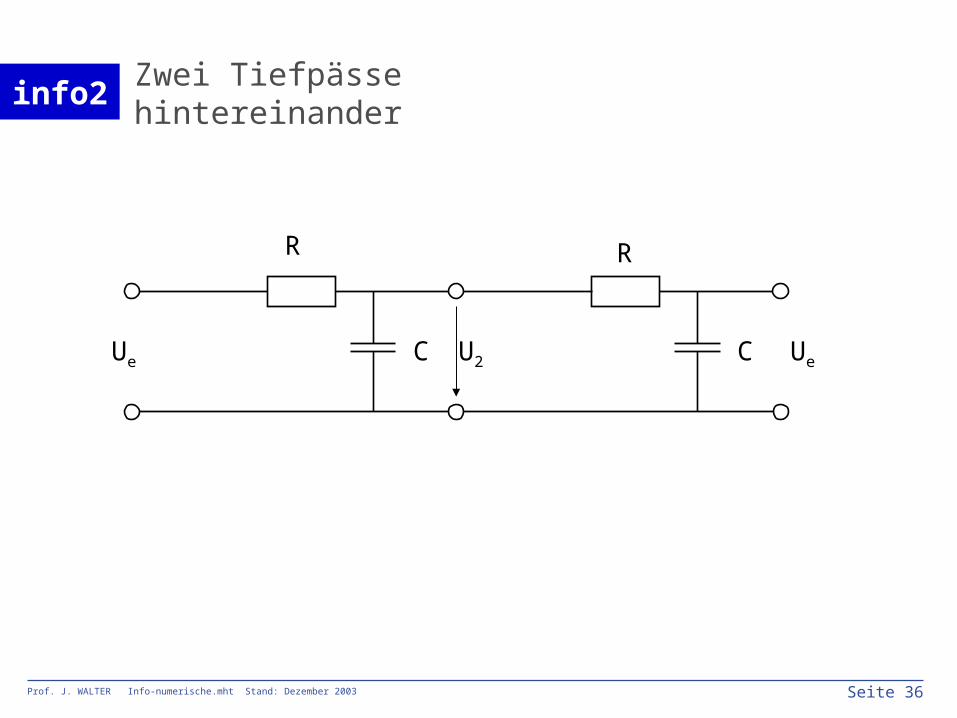
Zwei Tiefpässe hintereinander
CUe CU2 Ue
R R
info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 37
Z-Transformation
Kontinuierliche Fourier-TransformationZeitsignale
Diskrete Z-TransformationZeitsignale DFT ist Spezialfall der
Z-Transformation

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 38
z-Tranformierte
Z-Transformation ordnet Zeitsignal x(n Ta)=xn
Z-Transformierte
Fourier-Transformierte
Diskrete Fourier-Transf.
Im allgemeinen gilt:
n
n
nn zxzX )(ˆ
Funktion Zuordnung komplexe Variable z)(ˆ zX
)(
)(
)(ˆ
jX
jX
zX
d
)()()(ˆ jXjXzX d

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 39
Z-Tranformierte als Abbildung
j Im
aT
2
Beschränkung auf einseitige Z-Transformation
xn=0 für n<0
Re
aT
instabilstabil
Z-Ebene
+1
s-Ebene

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 40
Eigenschaften der Z-Transformation
ist ein Polynom von z• Der Faktor z-n separiert die Funktionswerte voneinander.• Der Faktor z-n beinhaltet eine Verzögerung um n Ta von t=0 aus.
• Einheitskreis in der Z-Ebene
)(ˆ zX
ˆaTjez
)()(ˆ jXezX dTj a

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 41
Anwendung auf nichtrekursive Filter
kn
N
Nkkn xay
ak
x(n Ta)=xk y(n Ta)=yk
Blockschaltbild eines nicht-rekursiven Filters
Ausgangssignal hängt nur von Werten des Eingangssignals ab. Keine Rückkopplung
immer stabil
gefaltet! Werte"zukünftige"
:Bsp. 221101122
knk
nnnnn
xa
xaxaxaxaxa

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 42
Zusammenhang: Y(z), X(z), A(z)
m
mm
k
kk
k
n
knkn
N
Nk
kk
nkn
n
N
Nkk
n
nn
zxza
Nkan-km
zxza
zxazyzY
***
für 0 für
***
)()(ˆ
)(
rteEingangswe Trf.-Z Transf.-Z )(ˆ)(ˆ zxzA
k-k)-(n-
gnalsAusgangssi
-Filter des Trf.-z
zzz n *
ˆ

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 43
Filterkoeffizienten - Übertragungsfunktion
tenKoeffiziender Trf- Z)(ˆ)(ˆ (2)
Box-Black )(ˆ)(ˆ
)(ˆ (1)
)(ˆ)(ˆ)(ˆ
)(ˆ
)()()( :Analogie )(ˆ)(ˆ)(ˆ
k
kk zazAzG
zX
zYzG
zAzX
zYzG
jXjGjYzXzAzY

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 44
Kausaler Filter
N
kknkn xay
0

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 45
Akausaler Filter
N
Nkknkn xay

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 46
Beispiel für FiR-Filter
)31217123(35
12112 nnnnnn xxxxxy
35
12
10 2 3
x(n*Ta) y(n*Ta)
tn 0
35
17
35
3
akx(n·Ta) y(n · Ta)
tn

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 47
Beispiel: mittelnder Filter
rvallAbtastinte ein um gVerzögerun
ˆ
)1
1(3
1)(
3
1*)(
3
1
3
1
3
1
1
1
1
101
11
z
zzzzzzazG
xxxy
k
kk
nnnn

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 48
Blockschaltbild nicht rekursiver Filter
z-1 z-1 z-1xn+N xn-Nxn
a-N a-N+1 a0 aN
yN
++
++ +
+

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 49
Filterkoeffizienten für Kreisfunktionen
k
kTjk
Tj
Tj
k
k
kk
aa
a
ea)e(zG
ez
zazAzX
zYzG
*ˆ
ionenKreisfunkt ˆ eisEinheitskr
tenKoeffizien-Filterder Trf.- Z
)(ˆ)(ˆ)(ˆ
)(ˆ
Trf.-Zder lSpezialfal ist DFT
.Fouriertrfdiskreter mit identisch Trf.-Z ist ArgumentFür
)()(ˆ
jxezx
ez
dTj
Tj
a
a
Nkak für :Def. 0

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 50
N
Nk
kTjkdd
aeajAjG *)()(
dtetsT
c
ects
T
T
tjnn
tjnn
2/
2/
*)(1
*)(
dejGT
a a
a
a
kTjT
T
da
k )(2
/
/
a
a
TT
TT
2ˆ
2ˆ
Abtast-intervall
Zeit-bereich
Analogie Filter – Komplexe Koeffizienten

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 51
TP Übertragungsfunktion
ka
T
da
kTjkTjT
da
k
dd
kTjT
dakTj
T
da
k
adkTjGT
deejGT
a
jGjG
dejGT
dejGT
a
a
aa
a
a
a
a
a
)cos(*)(2*2
)(*)(2
)()( Funktion gerade GIst
*)(2
*)(2
/
0
/
0
d
/
0
/
0

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 52
Idealer Tiefpass angenähert durch Koeffizienten ak
für
0
1)(
G
jG
g
g
G
g
ag
agag
a
agaa
ak
kT
TkT
kT
TkTdTk
Ta
g
)sin(
)sin()cos(1
2
2
0
fa
fgksi
fa
fgaa kk 2
2
gerade Funktion
fg = Grenzfrequenzfa = Abtastfrequenz

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 53
Integralsinus
x
xxsi
)sin()(
Kleine Übung:Stellen Sie die Funktion si(x) im Bereich von -20<x<20 dar.Lösungsmöglichkeiten: Maple, Excel, Simulink, Mathlab,HPVEE, Taschenrechner, plot Taschenrechner

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 54
Beispiel: Berechne Tiefpass
3
1
2*3
2
1 3
02
*22
1 2
1
2*1
2
1 1
2
10
2
1 0
)sin()(
33
22
11
0
)si(kaa
)si(kaa
)si(kaa
)si( ka
x
xxsi
3113 3
11
2
11
3
1
nnnnnkn
N
Nkkn xxxxxxay
Filter-gleichung
4
1 100 25
3
fa
fgHzfaHzfg
N

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 55
Kleine Übung
• Eingangsfunktion für Filter Impuls der Breite 5 – Amplitude = 1
• Berechnen Sie die Ausgangswerte für den TP mit Excel

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 56
Filtergleichung
)3cos(3
2)1cos(
2
2
1
)(3
1)(
1
2
1
)(
33
3
3
aa
TjTjTjTj
k
k
kTjkd
TT
eeee
eajG
aaaa
a
Gleichspannungsverstärkung
Nk
Nkkd ajG )0(

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 57
„Kleine Übung“
• Plotten Sie die Filtergleichung für x=-3…3
xTa
info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 58
Übung:
• Berechnen Sie die Filterkoeffizienten für einen Hochpass mit:
• fg=20Hz• N=3• fa=100Hz• Ermitteln Sie die Ausgangsfunktion y[n] bei
einer Eingangsfunktion: Rechteck mit der Breite von 9 Abtastwerten der Amplitude 1.

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 59
Tiefpass Hochpass
)( jG )( jG
)( jG
1ˆ 0a Allpass nn xy

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 60
Koeffizienten für Hochpass
TPk,APk,HPk, aaa
k 0 +/-1 +/-2 +/-3
ak,AP 1 0 0 0
ak,TP 0,4a0,TP
0,3a1,TP
0,09a2,TP
-0,06 a3,TP
ak,HP 0,61-a0,TP
-0,3- a1,TP
-0,09 -a2,TP
0,06-a3,TP

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 61
Tiefpass Bandpass
)( jG
)( jG
)( jG
TPO
TPU
BP
UNTENTPk,OBENTPk,BPk, aaa

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 62
Bandsperre
TPuntenk,TPobenk,APk,BSPk,
BPk,APk,BSPk,
aaaa
aaa

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 63
Rekursive Filter
Beschränkung für neues aktuelles Ausgangssignal• Augenblicklicher Eingangswert xn und zurückliegende
Eingangswerte xn-k
• Rückführung nur von vergangenen Ausgangswerten yn-k
• Endliche Anzahl von Koeffizienten
N
k
M
kknkknkn ybxay
0 1
**
info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 64
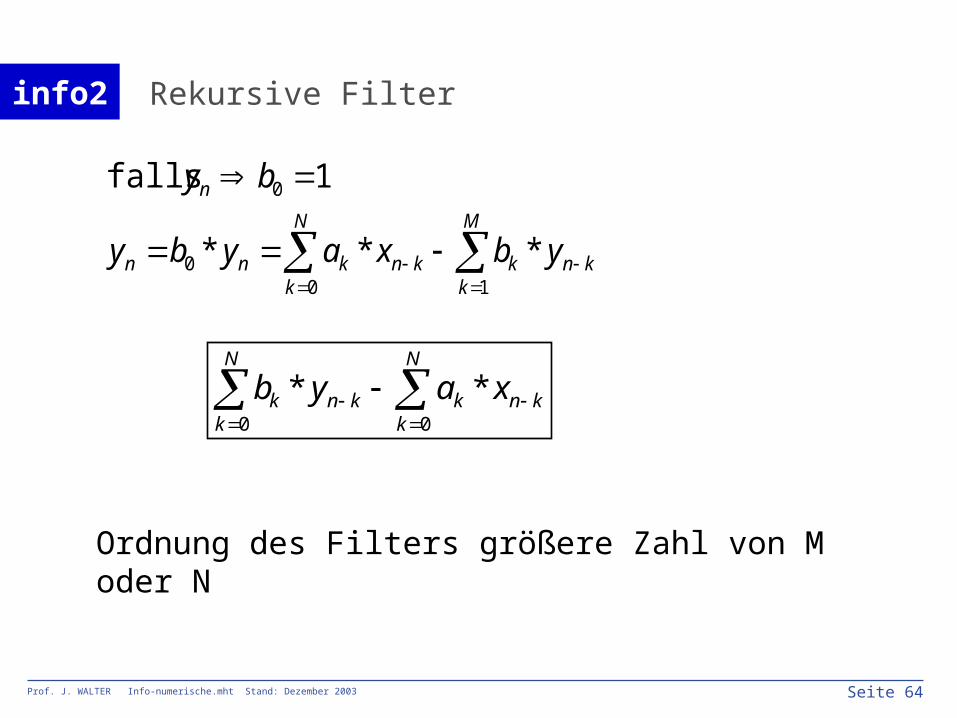
Rekursive Filter
N
k
M
kknkknknn
n
ybxayby
by
0 10
0
***
1 falls
N
k
N
kknkknk xayb
0 0
**
Ordnung des Filters größere Zahl von M oder N

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 65
Blockbild rekursiver Filter
z-1 z-1 z-1xn xn-N
a0 a1 aN-1aN
++ +
++
+
z-1 z-1 z-1yn-M
bM bM-1b1
+
yn-1
yn

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 66
Beispiel
Filter-IIR ortImpulsantw infinite
ortImpulsantw unendliche
0
für
pulsEinheitsim für
0
01
01222
00111
010000
0
01
0 1
5,0)(
5,05,00
5,0*5,05,002
5,05,01
5,010
00
01
15,0*5,0
**
xkTy
xyxyxkn
xyxyxn
xyxyxn
xyxyxn
nx
nxx
abyxy
ybxay
ka
kkkkk
n
n
knnn
N
k
M
kknkknkn
info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 67
Abtasttheorem
• Bei allen numerischen Filterberechnungen FIR muss das Abtasttheorem eingehalten werden

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 68
Herleitung Berechnung Koeffizienten FIR
• Optimierung nach „Kleinstes Fehlerquadrat“

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 69
Filter allgemein
Filter lassen sich nach verschiedenen Kriterien entwerfen. Die Kriterien sind:
1. Welligkeit im Durchlassbereich (Frequenzbereich)2. Welligkeit im Sperrbereich (Frequenzbereich)3. Steilheit beim Übergang vom Durchlass- zum Sperrbereich
(Frequenzbereich)4. Eignung zur Impulsübertragungsfunktion (Zeitbereich)
5. Vorsicht: Filterordnung im analogen Bereich nicht mit Filterordnung (Taps) im digitalen Bereich gleichsetzen
wg
|A|

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 70
FIR-Filter - DSP
• Digital Signal Processor– RISC-Prozessor – Jeder Befehl wird in einem Taktzyklus
ausgeführt • Filtergleichung: Addition und Multiplikation
– Koeffizienten multipliziert mit Messwerten– MAC Multiplizier- und Accumuliereinheit
• modifizierte Harvard-Architektur– im Programmspeicher sind auch Daten –
Koeffizienten

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 71
Suche nach dem idealen DSP….
• Der ideale DSP kann in einem Taktzyklus: Koeffizienten von Speicher 1 und Messwerte von Speicher 2 einlesen, multiplizieren und Addieren
• BSP: ADSP 21xx• BSP: TMS 320xx• BSP: Motorola 56xxx, 96xxx

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 72
Korrelationsmesstechnik
Messgröße xMessgröße y
Zusammenhang? =Korrelation
X Ernteertrag – Niederschlagsmenge y

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 73
Mittelwert
N
nnx
Nx
1
1
N
nny
Ny
1
1

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 74
Varianz
N
nnx xx
N 1
2 )²(1
N
nny yy
N 1
2 )²(1
info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 75
Kovarianz
n
N
nnxy
n
N
nnxy
yxN
yx
yyxxN
1
1
1
0,0
))((1
falls

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 76
Korrelationskoeffizient
2
1
2
1
1
)()(
)()(1
yyxx
yyxxN
r
r
N
n
n
N
n
n
n
N
n
n
yx
xy

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 77
Berechnungen in EXCEL
• Analyse Plug-in aktivieren• Kleine Übung• Sie haben zwei Messreihen: xn, yn
– xn: 1, 2, 3, 4, 5, 6
– yna: 6,5,4,3,2,1– Berechnen Sie den Korrelationskoeffizienten– Berechnen Sie den Korrelationskoeffizeinten für
– ynb: 1,2,3,4,5,6– Berechnen Sie den Korrelationskoeffizeinten für
– ync: 1,2,3,3,2,1– Stellen Sie die Messreihen als Kurven dar.

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 78
Ergebnisse
• Korrelationkoeffzient:– +1 vollständige Abhängigkeit– 0 statistisch unabhängig– -1 vollständige Abhängigkeit aber
gegenläufig

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 79
Korrelationsfunktionen
nsfunktionKorrelatio Kovarianz
um gVerzögerun
)( Signal
früheremmit Signal gemgegenwärtizwischen n Korrelatio
Zeitpunktgleichem )( bein Korrelatio Prüfung
)( )(
a
a
a
a
nana
kT
Tkn
nT
nT
ynTyxnTx

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 80
Berechnen Sie die Kreuzkorrelationsfunktion
• 1,2,4,6,3• 2,3,2,1,3• Faltung – Kreuzkorrelationsfunktion

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 81
Autokorrelationsfunktion
• Dien Funktion wird mit sich selbst übereinandergeschoben und multipliziert und aufsummiert– symmetrisch– Maximum ist bei Verschiebung ττ=0
• Beispiel: – Geschwindigkeitsmessung mit zwei
Sensoren– Autokorrelationsfunktion

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 82
Kreuzkorrelationsfunktion
• eigentlich nur periodische Funktionen• nicht periodische Funktionen T->unendlich• Funktion 1 wird gegen Funktion 2 um τ
verschoben und jeweils miteinander multipliziert und aufsummiert

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 83
Kreuzkorrelation – Faltung -HPVEE
• Kreuzkorrelation xcorrelate– Device – Function – Signalprocessing –
• Convolve

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 84
KKF und AKF
knnyy
knnxx
aaxx
knnaxy
nnnnxy
aaaxy
yyN
xxN
TknxnTxN
yxN
kTKKF
yxyxN
TknynTxN
kT
*1
*1
)]([*)(1
*1
)(
00)*1
(
)]([*)(1
)(
AKF inüber geht KKF
bei

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 85
Stetige Korrelationsfunktionen
T
T
y
T
T
x
T
T
T
T
dtytyT
dtxtxT
dttyT
ty
dttxT
tx
)²)((2
1
)²)((2
1
)(2
1)(
)(2
1)(
2
2
Mittelwert
Varianz

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 86
Kovarianz
0Mittelwert
T
T
xy
eff
N
nx
N
nxy
dttytxT
xdttxT
dtytyxtxT
)(*)(2
1
)²(2
1
))()()((2
1
2
1
2
1
info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 87
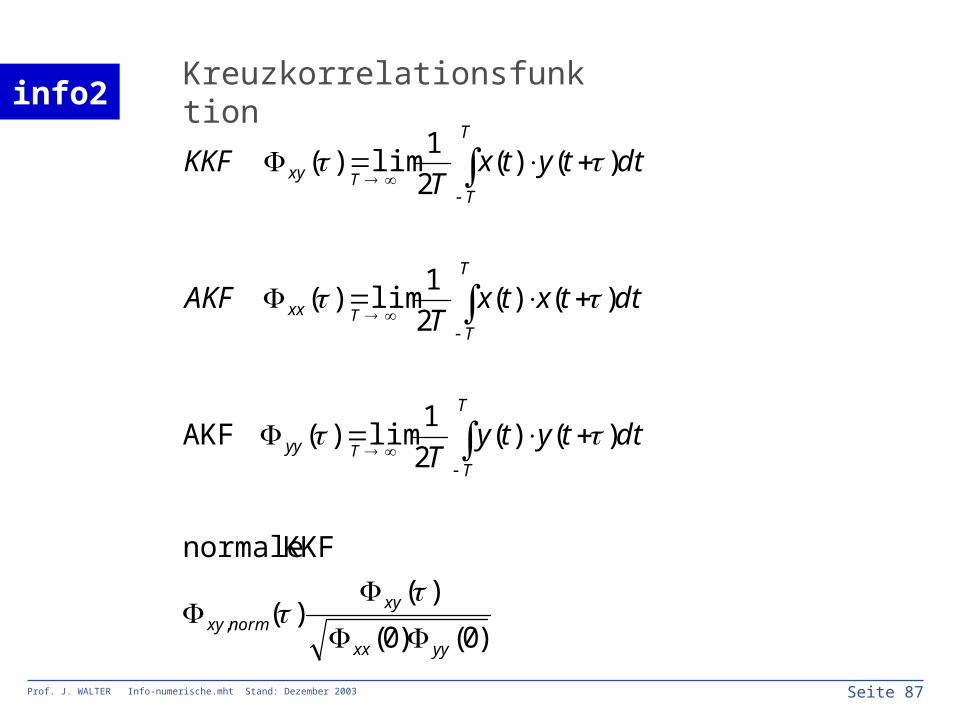
Kreuzkorrelationsfunktion
)0()0(
)()(
KKF normale
)()(2
1lim)( AKF
)()(2
1lim)(
)()(2
1lim)(
,
yyxx
xynormxy
T
T
yy
T
T
xx
T
T
xy
dttytyT
dttxtxT
AKF
dttytxT
KKF
T
T
T

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 88
Andere Schreibweise
dttytxT
dttytxT
TT
T
)()(1
)()(2
1
0

info2
Prof. J. WALTER Info-numerische.mht Stand: Dezember 2003 Seite 89
diskrete Korrelation – diskrete Faltung
Faltung diskrete
][][][ mnhmxnym
m
nKorrelatio diskrete
][][][ mnhmxnym
m
Beachten Sie bei der konkreten Aufgabe die Randbedingungen und die Reduktion auf signifikante Punkte.