indexing the imprecise positions of moving objects xiaofeng ding and yansheng lu department of...
TRANSCRIPT

Indexing the imprecise positions of
moving objects
Xiaofeng Ding and Yansheng Lu
Department of Computer ScienceHuazhong University of Science & Technology
Wuhan, China.

2
Outline of the Talk
Background
The moving objects with uncertainty
Query evaluation and indexing
Conclusions

Application pull Many applications need to manage imprecise
data Scientific applications Global Positioning System Sensor databases Meteorology system Location based services
The reasons bring imprecision Measurement error Sampling error Update delay Etc..

4
Technology push Indexing methods
R-tree, MVR-tree, HR-tree, … TPR-tree, TPR*-tree, Bx-tree, Bdual-trees …
Range search R-tree, MVR-tree, HR-tree,
Nearest neighbor Time parameterized NN Continuous NN Location based NN
Reverse nearest neighbor Stream processing …

5
Technology push (Cont.)
Orion DBMS
TRIO project
ConQuer project
U-tree
All the above work assumes that the database has the exact location of each object. But this is rarely possible.

6
Technology push (Cont.)
ORION DBMS
* Open-source DB* Open-source DB * Uncertainty * Uncertainty support * DB support * DB enhancementenhancement
Technology push (Cont.)
Uncertain range search [Reynold et al. VLDB 04], [Tao et al. VLDB 05]
Uncertain nearest neighbor search [Reynold et al. SIGMOD 03, TKDE 04]
Uncertain join processing [Reynold et al. CIKM 06]
All existing work considers only uncertain stationary objects.

Uncertain model of moving objects
recorded location in database
uncertainty region
radiusmoving velocity
The moving object’s location is described by a probability density function within the uncertainty region.
9
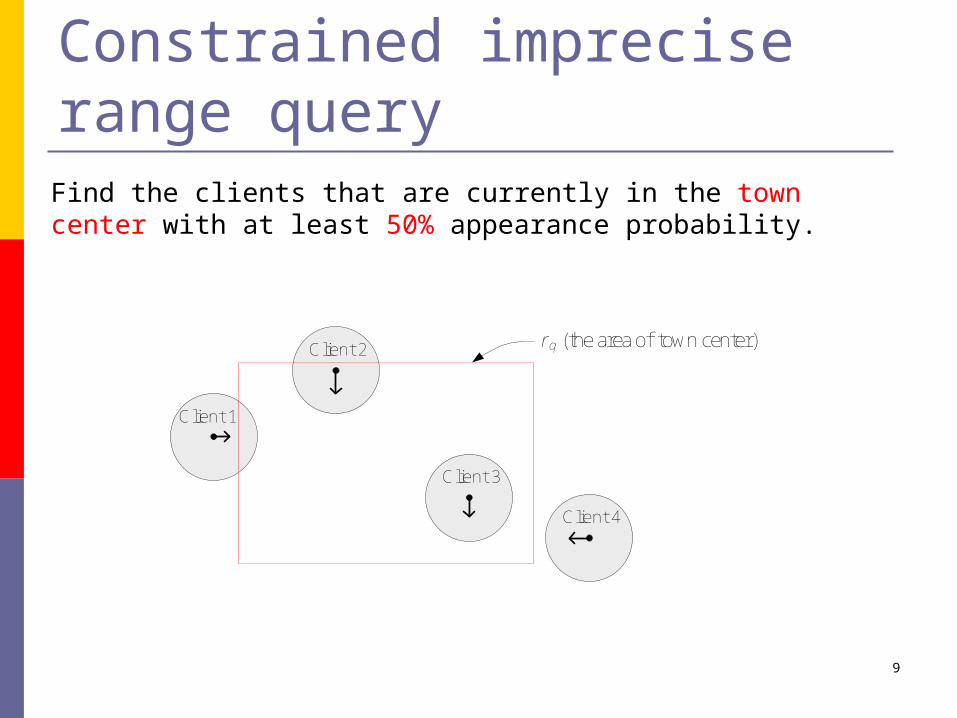
Constrained imprecise range query
Client 2
Client 1
Client 4
Client 3
rq (the area of town center)
Find the clients that are currently in the town center with at least 50% appearance probability.

10
Qualification probability
x
U(i,t)uncertainty region R
query region
U(i,t) ∩ R
Client i
Qualification probability:( , )
( , )U i t R
i iP pdf x t dx
Calculation time of an appearance probability in 2D space: 1.3ms
Time for a random I/O access: 10ms
11
Goal
Support any pdf
Minimize the number of page accesses
Minimize the number of qualification probability calculations.
Minimize the total cost (I/O + CPU)

12
Main idea
For each moving object, pre-compute the velocity constrained region (VCR) to: Instead the uncertainty region
Uncertainty region is usually a polygon VCR is usually a rectangle
Efficiently calculate whether an object appears in a query region with at lest a certain probability
The pdf within VCR is known as Uniform or otherwise

13
Quick examples
VCR:
uncertainty region
recorded location in database
moving velocity
velocity constrained region
Dx(t)
Dy(t)
{ 0 0
0 0
Dx(t)= Vx(t ) (t-t )Dy(t)= Vy(t ) (t-t )
14
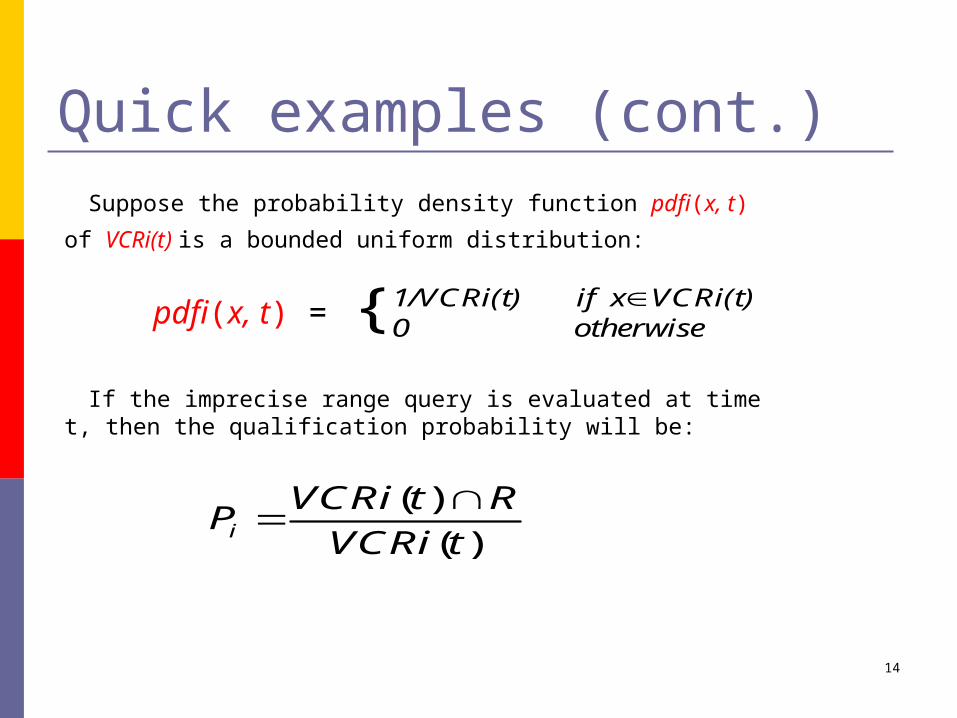
Quick examples (cont.) Suppose the probability density function pdfi(x, t)
of VCRi(t) is a bounded uniform distribution:
( )
( )i
VCRi t RP
VCRi t
{ 1/VCRi(t) if x VCRi(t)0 otherwise
pdfi(x, t) =
If the imprecise range query is evaluated at time t, then the qualification probability will be:
15
p-bound
Pre-compute some “auxiliary information” that can be used to efficiently decide whether an object appears in a region
with at least a certain probability without calculating its actual appearance probability.
1 1 2 2{ ( ), ( ), ( ), ( ),...... ( ), ( )}d dL p U p L p U p L p U p
p-bound of a d-dimensional moving object:
16
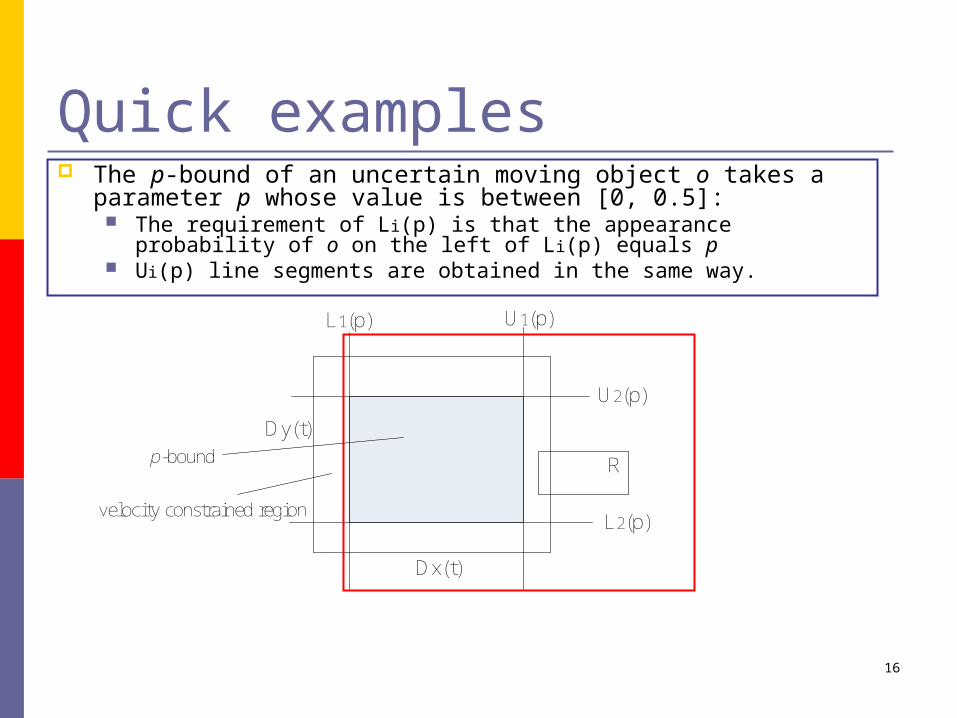
Quick examples The p-bound of an uncertain moving object o takes a parameter
p whose value is between [0, 0.5]: The requirement of Li(p) is that the appearance probability of o on
the left of Li(p) equals p Ui(p) line segments are obtained in the same way.
R
velocity constrained region
Dx(t)
Dy(t)
L1(p) U1(p)
U2(p)
L2(p)
p-bound
Indexing
Indexing is necessary Query time is affected by the number of objects that to
be considered For a large collection of points, it is impractical to
evaluate each point to answer the query.
Indexing the moving object with uncertainty in the virtue of TPR*-tree Velocity constrained index

Other issues Calculation optimization
Nearest neighbor queries
Reverse nearest neighbor queries
Join processing
Metircs for measuring the answer quality
19
Conclusions
Notions about uncertain moving objects Uncertain models Kinds of queries.
The effective method for answering constrained imprecise range queries Pre-computed velocity constrained region The concept of p-bound Indexing methods.

Thank you!