implementation of lms and vslms algorithms for speech enhancement using...
TRANSCRIPT

ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 4, Issue 11, November 2015
2659
All Rights Reserved © 2015 IJARECE
Abstract— This paper describes a speech enhancement
system based on TMS320C6713 digital signal processor
(DSP) for real-time application. As the technology advances,
we require more complex systems for sophisticated
algorithms involving digital signal processing (DSP)
techniques. Therefore, the hardware implementation of
algorithms using DSP has gained much more attention
during past few years. One of the most important
applications of DSP is speech enhancement which focuses on
eliminating the background noise from the speech signal. In
this paper we will focus on enhancement of speech audio
signal from noise and will compare Least Mean-Square
(LMS) and Variable Step-Size LMS (VSLMS) algorithms
using DSP processor with code composer studio (CCS) v3.1.
As an input we have used clean Hindi audio speech signal
and uniform noise signal for examining the SNR.
Index Terms— Adaptive Noise Cancellation (ANC), Least
Mean Squared (LMS), Signal-to-Noise Ratio (SNR),
Variable Step-Size LMS (VSLMS).
I. INTRODUCTION
Speech signals in the real world scenarios are often corrupted
by various types of degradations. Degraded speech here means
poor perceptual quality and intelligibility. Poor perceptual
quality of speech will lead to listener fatigue and poor
intelligibility will lead to degraded performance in tasks like
speech and speaker recognition. The objective of this paper is
noise minimization and quality improvement of the signal
through hardware implementation of adaptive noise
cancellation.
DSP processors are used for speech enhancement and are
primarily concerned with real-time signal processing. Real-time
signal processing means that the processor will keep pace with
some external event [2].
Deepika Pandey, ECE Department, IMS Engineering College, Ghaziabad,
India. Akshita Bhatnagar, ECE Department, IMS Engineering College,
Ghaziabad, India.
Aniket Kumar, ECE Department, IMS Engineering College, Ghaziabad, India.
Pankaj Goel, ECE Department, IMS Engineering College, Ghaziabad,
India. Mahesh Chandra, ECE Department, BIT Mesra, Ranchi, India.
Real-world signals which are analog in nature need to be
processed so that the information contained in them can be
displayed, analyzed or converted to other useful form [9].This
operation is performed by Digital Signal Processing (DSP)
system. The DSK board is of an approximate size of 5x8 inches.
TMS320C6713 is floating-point digital signal processor having
16-bit stereo codec TLV320AIC23 (AIC23) for analog input
and output [6]. The DSK board includes 256 kB (kilobytes) of
flash memory and 16 MB of synchronous dynamic random
access memory [6]. There are also four connectors on the board
for input and output connections: MIC IN is for microphone
input, LINE IN is for line input, LINE OUT is for line output,
and through HEADPHONE headphones can be connected to
play the output (usually multiplexed with line out).
In this paper, the comparative performance of LMS and
VSLMS adaptive algorithms are presented when implemented
on TMS320C6713 DSP kit and the obtained results were then
analyzed using Goldwave software.
II. ADAPTIVE FILTERS
A filter is a device that can map its input signal to an output
signal in order to extract the desired information contained in
the signal. Adaptive filter is a filter that is capable of tracking
the variations in the statistical characteristics of input data such
as mean and correlation functions and capable of self-adjusting
its parameters. Adaptive filters are used for most of applications
today because they have the ability to self-modify its frequency
response and also to adapt the response according to the changes
in the input signal characteristics.
Fig. 1 General Adaptive Filter Configuration
Adaptive filters are needed where the signal or system
involved is fluctuating, or statistics involved and parameters of
random signal are changing from time to time. The aim of
adaptive filtering systems is to minimize the noise portion in
order to obtain the uncorrupted desired signal. Here, a reference
Implementation of LMS and VSLMS algorithms
for Speech Enhancement using TMS320C6713
DSP Processor
Deepika Pandey, Akshita Bhatnagar, Aniket Kumar, Pankaj Goel, Mahesh Chandra

ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 4, Issue 11, November 2015
2660
All Rights Reserved © 2015 IJARECE
of the noise signal which is called as reference signal x(n) is
given to the filter. We need to design a filter so that output y(n)
becomes close estimate of d(n). For this the adaptive filter
performs the task of prediction which involves filtering of the
reference signal x(n). The noise which is present in the reference
signal is then subtracted from the primary signal which will
provide an error signal e(n). Error signal e(n) will be feedback to
adaptive algorithm and filter weights are adjusted so that y(n)
becomes better estimate of d(n). Several Adaptive Algorithms
can be used such as Least Mean Square (LMS), Recursive Least
Mean Square (RLS), Normalized Least Mean Square (NLMS),
Variable Step-Size LMS (VSLMS), etc.
A. Adaptive Noise Cancellation
Adaptive noise cancellation (ANC) shown in Fig.2 is
performed by subtracting predicted noise from a received
signal, and continues the process of updating filter weights in
order to get an improved signal-to-noise ratio. The ANC system
is composed of two types of inputs, one is a primary input also
called as source signal s(n) and other is reference input or noise
input x(n). The primary signal gets corrupted by a noise x1(n)
which is usually correlated with noise signal x(n). The reference
signal can vary in amplitude, phase or time [1] as it is not
correlated with noise portion of primary signal.
We get the desired signal d(n) after the addition of primary
signal s(n) to the correlated noise signal x1(n). The reference
signal x(n) will be given to adaptive filter such that its output
y(n) can be subtracted from desired signal d(n) to yield error
signal e(n).
Fig. 2 Adaptive Noise Cancellation System
The output of the summer block is feedback to adaptive filter
in order to update the filter coefficients. The above process will
run recursively till we get the signal which is free of noise (no or
reduced noise component) which is supposed to be exactly the
same or similar to primary signal s(n).
B. Adaptive Algorithms
The two classes of adaptive algorithms which we will use in
this paper are: Least Mean-Square (LMS) and Variable
Step-size LMS (VSLMS).
1. LMS algorithm
The LMS algorithm was devised by Widrow and Hoff in 1959
[1]. It is widely used because of its simplicity and it is a
stochastic gradient-based algorithm. This algorithm belongs to
the family of stochastic gradient algorithms involving filtering
and adaptive process. The filter tap weights for the adaptive
filter are updated with each iteration according to the following
recursive relation [3, 6]:
𝑤𝑘(𝑛 + 1) = 𝑤𝑘 (𝑛) + 2 𝛽 𝑥 (𝑛 − 𝑘)𝑒 (𝑛) (1)
where, k =0,1,…., N-1, x(n) represents the input vector or time
delayed input samples, wk(n) is the N weights or coefficients of
the adaptive FIR filter tap at specific time n and β is called as
the step size.
The value of β will affect the performance of the LMS
algorithm, if β value is too small, in this case the adaptive filter
will take more time to converge to its optimal solution and if β
value is too large then in that case the adaptive filter becomes
quite unstable and its output will diverge from optimal solution
[4].
2. VSLMS algorithm
The VSLMS algorithm was introduced in 1986 [8]. LMS
algorithm has fixed step size value for every tap weight in each
iteration [5]. In VSLMS algorithm the step size is improved
after every sample of data, as weight improves in LMS
algorithm.
y(n)=wH(n).x(n) (2)
e(n) = d(n) – y(n) (3)
ŵ(n+ 1) = ŵ(n) + µ.x(n).e(n) (4)
VS LMS algorithm is obtained by combining LMS algorithms
with different step sizes. Larger step-size will provide faster
convergence whereas smaller step-size will reduce the
misadjustment factor.
C. Experimental Setup
Fig. 3 Real-time experimental setup using DSP processor
The DSP development software i.e. Code Compose Studio
can accept either C or assembly code to generate output (.out)
file, which can be load on DSP chip. In this case, C
programming is used corresponding to the desired problem. The
real-time experimental setup using DSP processor as shown in
Fig. 3 has one DSK (DSP Starter Kit), one Lenovo laptop with
CCSv3.1, one HP laptop with Goldwave software which is used
ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 4, Issue 11, November 2015
2661
All Rights Reserved © 2015 IJARECE
to record the output and one Headphone to play the output using
HEADPHONE OUT port of DSK.
III. RESULTS
We have implemented the LMS and VSLMS algorithms in C
code using DSP kit (TMS320C6713) and observed the
following waveforms in Goldwave: Noise, dplusn (desired
signal+noise), error (e(n)), yn (output of adaptive filter).
We have given uniform noise as an interference signal which
was added to clean speech signal (yaha se lagbhag paanch mile
dakshin pashchim me katghar gaon hai). Both noise signal and
clean audio signal are played repeatedly through window media
player and given to LINE IN port of DSK board using 3.5mm
jack cable whose other side is connected to PC. The output is
played through headphone connected at HEADPHONE OUT
port of DSK board.
A. For LMS Algorithm
For the applied input at LINE IN port of the DSK (DSP Starter
Kit) board, following output has been obtained which are shown
below:
Table I. SNR calculations for LMS algorithm
.
.Fig. 4 Bar chart representation of input – output SNRs for LMS algorithm
TABLE I shows the values of input SNRs and corresponding
output SNRs calculated for LMS algorithm. The Bar chart
shown in Fig.4 is showing relationship between Input SNR and
output SNR.
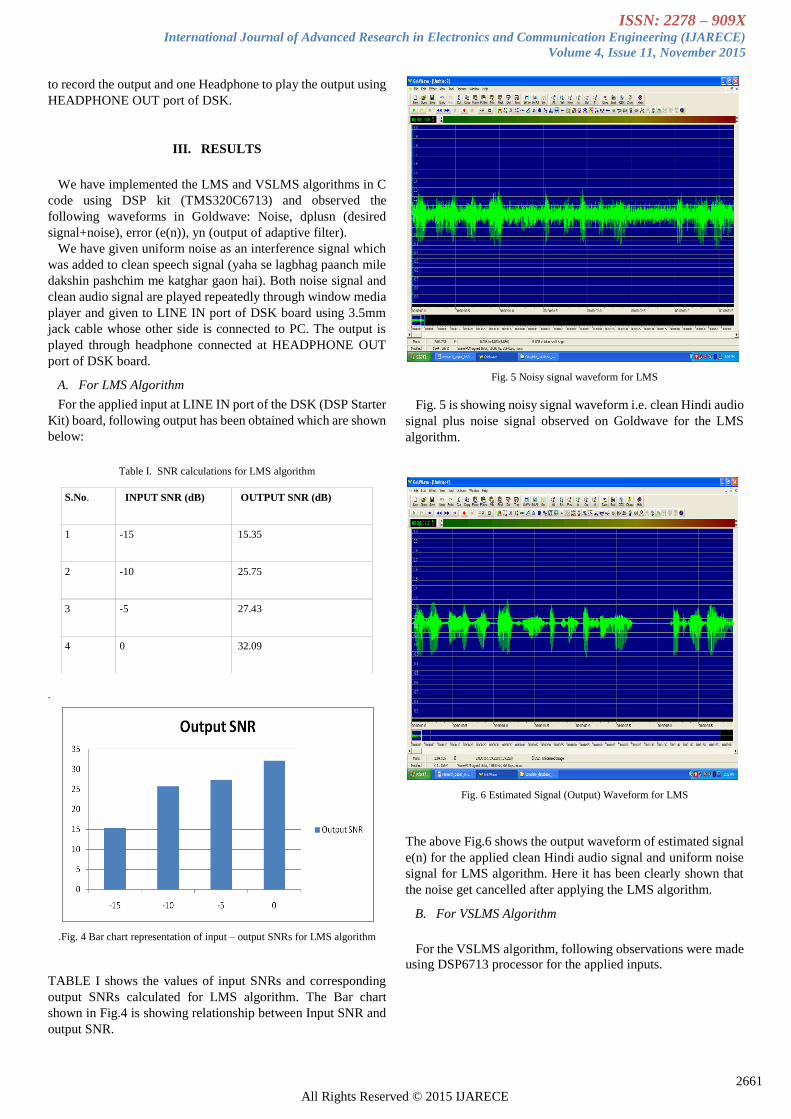
Fig. 5 Noisy signal waveform for LMS
Fig. 5 is showing noisy signal waveform i.e. clean Hindi audio
signal plus noise signal observed on Goldwave for the LMS
algorithm.
Fig. 6 Estimated Signal (Output) Waveform for LMS
The above Fig.6 shows the output waveform of estimated signal
e(n) for the applied clean Hindi audio signal and uniform noise
signal for LMS algorithm. Here it has been clearly shown that
the noise get cancelled after applying the LMS algorithm.
B. For VSLMS Algorithm
For the VSLMS algorithm, following observations were made
using DSP6713 processor for the applied inputs.
S.No. INPUT SNR (dB) OUTPUT SNR (dB)
1 -15 15.35
2 -10 25.75
3 -5 27.43
4 0 32.09

ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 4, Issue 11, November 2015
2662
All Rights Reserved © 2015 IJARECE
Table II. SNR calculations for VSLMS
Fig. 7 Bar chart representation of input – output SNRs for VSLMS algorithm
TABLE II shows the values of input SNRs and corresponding
output SNRs calculated for VSLMS algorithm. The bar chart
shown in Fig.7 is showing relationship between Input SNR and
output SNR.
Fig. 8 Noisy signal Waveform for VSLMS
Fig. 8 is showing noisy signal waveform i.e. clean Hindi audio
signal plus noise signal observed on Goldwave for the VSLMS
algorithm.
.
Fig. 9 Estimated Signal (Output) Waveform for VSLMS
Fig. 9 shows waveform for estimated signal e(n) for the
applied clean Hindi audio signal and uniform noise signal for
VSLMS algorithm. Here it has been clearly shown that the noise
get minimized
Fig. 10 Comparative Performance of LMS and VSLMS
IV. CONCLUSION
In this paper the behavior of LMS and VSLMS algorithms
was analyzed for Hindi clean audio signal & uniform noise as an
interference signal. Experimentally It has been observed that for
a fixed filter length, at low input SNR values, say -15 dB,
VSLMS algorithm performs better than LMS algorithm
whereas, at higher input SNR values, say 0 dB, LMS algorithm
performs better than VSLMS algorithm.
S.No. INPUT SNR (dB) OUTPUT SNR (dB)
1 -15 22.45
2 -10 24.57
3 -5 25.57
4 0 24.52

ISSN: 2278 – 909X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE)
Volume 4, Issue 11, November 2015
2663
All Rights Reserved © 2015 IJARECE
REFERENCES
[1] Vijay Kumar Gupta, Mahesh Chandra, and S.N. Sharan, “Real
Time Implementation Of Adaptive Noise Canceller,” International
Conference On Systemics, Cybernetics and Informatics, 2012, 24-28.
[2] Muhammad Amir Shafiq, Saqib Ejaz and Nisar Ahmed, “Hardware
Implementation of Adaptive Noise Cancellation over DSP Kit
TMS320C6713,” International Journal of Signal Processing, vol. 7,
Issue 1 ,2013, 75-86.
[3] Rajkumar Thennua and S.K.Aggarwal, “Hardware Implementation
of Adaptive Algorithms for Noise Cancellation,” International
Conference on Network Communication and Computer,553-557,2011.
[4] Rajkumar Thennua and S.K.Aggarwal, "Hardware Implementation
of NLMS Algorithm for Adaptive Noise Cancellation." National
Conference on Electronics and Communication (NCEC-2010). 2010.
[5] Sulekha saxena, V.K Gupta, Mahesh Chandra, and Pankaj Goel, “A
Family of Adaptive Filter Algorithms in Noise Cancellation for Speech
Enhancement,” International Journal of Electronic and Electrical
Engineering, vol. 5, Number 6, 2012, 511-513.
[6] Chassing Rulph & Reay Donald,“Digital Signal Processing &
Application with TMS320C6713 & TMS320C6416 DSK”(ISBN
978-0-470-13866-3, John Wiley & Sons, Inc, Edition 2nd 2008).
[7] Paulo S.R. Diniz, “Adaptive Filtering Algorithms and Practical
Implementation”(ISBN 978-0-387-31274-3, Kluwer Academic
Publishers, Edition 3rd 2008).
[8] Alexander D. Poularikas, Zayed M. Ramadan, “Adaptive Filtering
Primer with MATLAB”, (ISBN 978-0-8493-7043-4, Taylor & Francis
Group, LLC, 2006).
[9] M. A. Shanooja and J. Ramesh Kumar, “Low power VLSI
architecture for adaptive filter and its application to noise
cancellation,”International Journal of Emerging Trends in
Engineering and Development, vol. 2, Issue 3, 2013, 366-376.