ieee transactions on signal processing 2 …bpence/bayes_estimation_gpc_for_peer... · recursive...
TRANSCRIPT

IEEE TRANSACTIONS ON SIGNAL PROCESSING 2
Recursive Bayesian state and parameter estimation
using polynomial chaos theoryBenjamin L. Pence, Jeffrey L. Stein, and Hosam K. Fathy.
Abstract—This paper joins polynomial chaos theory withBayesian estimation to recursively estimate the states and un-known parameters of asymptotically stable, linear, time invariant,state-space systems. This paper studies the proposed algorithmsfrom a pole/zero locations perspective. The estimator has fixedpole locations that are independent of the estimation algorithm(and the estimated variables). Only the estimator zero locationsare affected by estimation. This paper uses a 3rd order differen-tial equation to study the behavior of the proposed estimator.It uses pole/zero maps and Bode plots to observe how thepolynomial chaos based estimators vary the system zero locationsto make the expanded polynomial chaos output most like (in someBayesian sense) the 3rd order system output.
Index Terms—Estimation, Bayesian Inference, Poles and Zeros,Bode Plot, Polynomial Chaos Theory.
I. INTRODUCTION
THIS paper combines generalized polynomial chaos theory
[1] with Bayesian estimation (see Chapter 12 of [2])
for a recursive solution to parameter and state (including
initial state) estimation in state space systems. Because of the
Bayesian estimation framework, this paper’s methods are able
to recursively calculate statistical characteristics (e.g., standard
deviation, confidence intervals) of the parameter estimates as
well as the most likely parameter values. This is an advantage
compared to earlier estimators by the authors [3] and [4] which
used the maximum likelihood estimation framework.
As a fundamental property, the proposed estimator has fixed
pole locations but variable zero locations. Polynomial chaos
theory determines the (fixed) estimator pole locations. Hence,
the estimator pole locations are independent of the estimated
variables. The estimation algorithm varies only the zero loca-
tions to calculate the estimates of the unknown parameters and
states. To help illustrate this fundamental property, Section 5
uses a simulation example to study the proposed estimators
from a frequency domain and pole/zero locations perspective.
State filtering approaches [5] such as extended Kalman
filtering, unscented Kalman filtering, and particle filtering,
may also be used to recursively estimate the unknown pa-
rameters and states of state space systems. To estimate the
system parameters, these state-filtering approaches treat the
unknown static parameters as dynamic states (usually with
zero dynamics). This generally increases the nonlinearity of
the system. In the proposed approach of this paper, linearity
is preserved. In some cases, the methods of this paper may be
B. L. Pence is with the Department of Mechanical Engineering, Universityof Michigan, Ann Arbor, MI, 48109 USA e-mail: [email protected].
H. K. Fathy is with Pennsylvania State University, and J. L. Stein is withthe University of Michigan.
easier to tune than the state filtering approaches [3]. As another
advantage, the proposed approach has the ability to treat
unknown initial states as estimation parameters and update
their values recursively as new data arrive. Perhaps the main
limitation of the proposed approach, however, relates to its
computational demand, especially for systems with a large
number of unknown parameters.
The following paragraphs review existing approaches that
use polynomial chaos theory as a framework for estimating
unknown parameters of dynamic state space systems. This
review groups the various estimators into 4 categories: (a) non-
recursive or batch estimators, (b) recursive observer/Kalman
filter based estimators, (c) recursive instantaneous cost esti-
mators, and (d) recursive Bayesian or maximum likelihood
estimators (without observers/Kalman filters) - the approach
of this paper fits into this last category.
Batch estimators calculate estimates of unknown parameters
by evaluating an entire set or batch of data as opposed to
updating the estimates iteratively as data arrive. Blanchard
et al. proposed a batch Bayesian parameter estimator for
linear and nonlinear state space systems that selects estimates
based on the maximum a posteriori criterion [6]. Another
batch estimator proposed by Blanchard et al. [7] called the
“whole-set-of-data-at-once” approach, combines polynomial
chaos theory with the extended Kalman filter. Blanchard
et al. report that the “whole-set-of-data-at-once” approach
yields better results than the recursive or so-called “one-
time-step-at-a-time” approach also developed by Blanchard et
al. Marzouk and Xiu [8] proposed a Bayesian approach to
estimate parameters of systems governed by partial differential
equations; they provided a valuable study on the convergence
of the polynomial chaos based estimators. Their work used
the stochastic collocation approach and extended earlier but
similar work [9] which used the Galerkin method.
Recursive estimators calculate system parameters iteratively
as new data arrive. Polynomial chaos theory has been com-
bined with state observers to recursively predict estimates of
the system states and then update the state predictions when
measurements of the output signals become available. These
observers can also estimate unknown system parameters if
the unknown parameters are explicitly treated as dynamic
system states. Blanchard et al. combined polynomial chaos
theory with the extended Kalman filter for state and parameter
estimation [7]. Li and Xiu proposed a polynomial chaos based
ensemble Kalman filter [10]. Saad et al. also proposed a
polynomial chaos based ensemble Kalman filter for system
identification and monitoring [11], and Smith et al. [12] com-
bined polynomial chaos theory with the Luenberger observer

IEEE TRANSACTIONS ON SIGNAL PROCESSING 3
for state estimation.
Southward developed a unique framework for recursive
parameter estimators based on polynomial chaos theory [13].
Southward’s method recursively calculates parameter esti-
mates by searching in the direction of gradients of instan-
taneous quadratic cost functions. Shimp [14] and the authors
[15] applied Southward’s method to the problem of real-time
vehicle mass estimation.
The proposed algorithms of this paper recursively seek
parameter estimates that satisfy some Bayesian optimality
criteria. However, they do not use state observers or Kalman
filters like the methods above. Instead, polynomial chaos
theory propagates parametric uncertainty through the dynamic
system, and Bayesian estimation theory is applied directly to
the stochastic system output to calculate parameter estimates.
Dutta and Bhattacharya also proposed a Bayesian estimator
based on polynomial chaos theory [16]. Unlike the methods of
this paper, however, their estimator requires the inner products
in the estimation algorithm to be recomputed at each time
step. The authors proposed a maximum likelihood approach to
recursive parameter estimation using polynomial chaos theory
in [3]. This paper extends the earlier work by the authors
but uses the Bayesian framework instead of the maximum
likelihood framework.
The following section provides an overview of generalized
polynomial chaos theory. Section 3 discusses pole/zero char-
acteristics of the proposed estimator. Section 4 derives the
recursive estimation algorithms. Section 5 uses an example
system with pole/zero maps and Bode plots to study the
proposed estimators, and Section 6 provides a summary and
conclusions.
II. GENERALIZED POLYNOMIAL CHAOS (GPC) THEORY
The generalized polynomial chaos (gPC) framework is
essential to the methods of this paper. It is already well-
established in the literature and is not considered a contribution
of this paper; a summary for linear systems is presented
here, however, to provide a foundation for the proposed
contributions. The gPC framework was developed by Xiu and
Karniadakis [1] building on groundbreaking work by Ghanem
and Spanos [17] and the conceptualization by Wiener [18].
Consider the following Linear-Time-Invariant (LTI), state-
equations:
x = Ax+Bu (1)
x(0) = x0. (2)
The vector x ∈ Rns contains the system states which have
initial conditions x0. The matrices A ∈ Rns×ns and B ∈
Rns×nu and the initial state vector x0 may be functions of
an unknown parameter vector θ ∈ Rnp . The input vector u ∈
Rnu is known and time-varying. The “dot” notation signifies
the derivative with respect to time t. This paper assumes that
the state equations are asymptotically stable for all possible
realizations of θ.
The output yk ∈ Rny is described by a linear, time-invariant,
discrete-time equation:
yk = Cx(tk) + vk. (3)
The output vector yk contains the observations on the
system at time tk. The matrix C ∈ Rny×ns may be a function
of the unknown parameters θ. The vector vk ∈ Rny represents
a Gaussian noise sequence with known covariance matrix
Rk ∈ Rny×ny .
The unknown parameters are viewed as being functions of
chaos (random) variables ξ = [ξ1 ξ2 . . . ξnp], i.e., θ = θ(ξ).
The chaos variables ξi are independently identically distributed
(IID), and the joint density function is ρ(ξ) =∏np
i=1 ρ(ξi)where ρ(ξi) is the distribution of the ith random variable
ξi. Parametric uncertainty leads to uncertainty in the system
states. Therefore, x(t) = x(t, ξ) is also a function of the chaos
variables.
Using the gPC framework, the unknown parameters θ(ξ)and system states x(t, ξ) are expanded in terms of orthogonal
polynomial basis functions Φα(ξ) : Rnp → R.
θ(ξ) =S∑
|α|=0
θαΦα(ξ) =r
∑
i=0
θiΦi(ξ), (4)
x(t, ξ) =
S∑
|α|=0
xα(t)Φα(ξ) =r
∑
i=1
xi(t)Φi(ξ). (5)
The expansion coefficients for the unknown parameters are
θi ∈ Rnp . The state expansion coefficients are xi(t) : R
+ →R
ns . Here, the vector α := [α1, . . . , αnp] is an np-dimensional
multi-index, and |α| is the sum of the vector elements, i.e.
|α| = α1 + . . . + αnp. Each element αi, i = 1, . . . , np of α
can take on a non-negative integer value between 0 and S. The
purpose of the second summation in (4) and (5) is to show
that the total number, r, of terms in the expansion is generally
not S + 1, rather it is calculated by (see [1]):
r =(S + np)!
S!np!. (6)
Under certain assumptions (see [1]), Equations (4) and
(5) become exact in the L2 sense as S → ∞. An infinite
expansion is not computationally attainable, so truncation is
necessary, and (4) and (5) are, in general, only approximations.
The paper by Xiu and Karniadakis [1] suggests how to select
the basis functions Φi(ξ). The parameter expansion coeffi-
cients θi, i = 1, . . . , r are chosen such that the distribution
of the parameter expansion (4) is the closest approximation to
the prior distribution ρ(θ) in some sense (e.g., by matching
certain statistical moments). Therefore, θi is known for all
i. Polynomial chaos theory solves for the coefficients xi(t)of the polynomial chaos state expansion (5) via the Galerkin
approach [17]. The Galerkin approach solves for the expansion
coefficients xi(t) by projecting the expanded state equations -
equations resulting from substituting (4) and (5) into (1) and
(2) - onto the polynomial chaos basis functions Φi(ξ) i.e.,
〈 ˙x(t, ξ), Φi(ξ)〉 = 〈A(ξ)x(t, ξ) +B(ξ)u(t), Φi(ξ)〉,
〈x(0), Φi(ξ)〉 = 〈x0, Φi(ξ)〉, i = 1, . . . , r. (7)
This projection removes the dependence on ξ, and the
resulting deterministic state equations have the state-expansion
coefficients xi(t) as the new state variables. The inner product

IEEE TRANSACTIONS ON SIGNAL PROCESSING 4
〈F (ξ), G(ξ)〉 is an np-dimensional integral of the product of
F (ξ) and G(ξ), evaluated over the event space of the random
variables ξ:
〈F (ξ), G(ξ)〉 :=
∫
G(ξ)F (ξ)W (ξ)dξ. (8)
The weighting function W (ξ) depends on the choice of
polynomial basis functions, and is generally equal to the prior
distribution ρ(ξ) of the chaos variables ξ [1].
The state-expansion of Equation (5) can be written as
the following matrix-vector product with the elements of
the vector state-expansion coefficients xi(t), i = 1, . . . , r as
elements of a single column vector X(t) (see [3]):
x(t, ξ) = P(ξ)X(t). (9)
In summary, applying the Galerkin projection (7) results in
r independent sets of deterministic state-equations. Evaluating
the deterministic dynamic equations results in known trajecto-
ries of the time dependent state-coefficients xi(t), i = 1, . . . , rwhich are then recombined - using (9) or (5) - with the random
variable dependent parts Φi(ξ), i = 1, . . . , r to obtain the
complete stochastic solution x(t, ξ).
III. POLES AND ZEROS OF GPC EXPANDED SYSTEMS
The r independent sets of deterministic state-equations can
be combined into one system of equations. The resulting set
of state equations is linear and time invariant:
X = AgPCX +BgPCu. (10)
The matrices AgPC ∈ Rrns×rns and BgPC ∈ R
rns×nu and
the initial conditions X(0) follow from Equation (7). This
polynomial chaos expanded system, Equation (10), is not a
function of ξ, but is deterministic.
The pole locations of the proposed estimator are the com-
plex eigenvalues of AgPC . They are fixed, i.e., they are
independent of ξ, and they are independent of the estimated
value of ξ.
The state equations are deterministic, but the polynomial
chaos output equation is a function of ξ:
yk(ξ) = CgPC(ξ)X(tk). (11)
Here CgPC(ξ) : Rnp → R
ny×rns is defined as CgPC(ξ) :=C(θ(ξ))P (ξ), where θ(ξ) is replaced by its polynomial chaos
expansion (4). Because the output equation is a function of
ξ, the zero locations of the polynomial chaos system are
functions of ξ (see page 15 of [19]). The proposed estimation
approach seeks the value of ξ, i.e. ξk, such that the polynomial
chaos system output yk(ξk) ∈ Rny is most like the true
system output yk in some optimal Bayesian sense (maximum
a posteriori or minimum mean squared error).
IV. RECURSIVE PARAMETER ESTIMATION
This section derives the recursive parameter update laws
for estimating the values of the random variables ξ given the
system output observations. The estimates of the unknown
parameters θ(ξ) are then calculated using (4) and the state
estimates are calculated using (5) or (9). Optimal Bayesian
estimation requires that the polynomial chaos approximations
in (4) and (5) are exact. As mentioned above, this requirement
is satisfied as the number of expansion terms goes to infinity
[1] (see also [8] and [9]). In practice, the expansion must be
truncated after a finite number of terms, and thus the parameter
estimates via this method are suboptimal.
Bayes rule [20] describes how a prior parameter distribution
ρ(ξ) : Rnp → R of a random vector ξ ∈ R
np evolves to
its posterior parameter distribution ρ(ξ|y0:k) : Rnp → R. The
posterior distribution ρ(ξ|y0:k) is conditioned on all of the sys-
tem observations y0:k up through time tk. One representation
of Bayes rule is as follows:
ρ(ξ|y0:k) =1
∫
L(ξ|y0:k)ρ(ξ)dξL(ξ|y0:k)ρ(ξ). (12)
The function L(ξ|y0:k) : Rnp → R is the likelihood
function, and for additive Gaussian noise assumptions, it is
defined as follows (see Chapter 12 of [2]):
L(ξ|y0:k) =k∏
τ=0
ρ(yτ |ξ)
∝ exp{−1
2
k∑
τ=0
(yτ − yτ (ξ))TR−1
τ (yτ − yτ (ξ))}. (13)
Here, L(ξ|y0:k) : Rnp → R is the scalar likelihood at
time tk of the unknown parameters ξ conditioned on y0:k.
The function ρ(yk|ξ) is the conditional probability of the
observation yk at time tk given ξ. In general, yk ∈ Rny
is the argument of ρ(yk|ξ), but in calculating the likelihood
(13), ξ becomes the argument of ρ(yk|ξ) : Rnp → R and
yk is assumed to be given. The vector yk(ξ) ∈ Rny is the
output of the stochastic model (11). The maximum likelihood
estimate ξ is the realization of ξ that maximizes the likelihood
function (13). The maximum likelihood estimation approach
was studied in [3]. If the time summation in the exponent
of (13) can be calculated iteratively, the likelihood function
(13) and hence the Bayesian posterior density (12) can also
be calculated iteratively. The time summation in the exponent,
i.e., the negative log-likelihood, can be written as follows [4]:
Jk(ξ) :=1
2
k∑
τ=0
(yτ − yτ (ξ))TR−1
τ (yτ − yτ (ξ)). (14)
The earlier work by the authors [3] describes how to cal-
culate Jk(ξ) : Rnp → R iteratively. Polynomial chaos theory
and the linearity of the output model (3) enable separation
of the time and unknown parameter parts of the equation to
make this recursion possible. By substituting (11) into (14)
and performing a few algebraic manipulations, the function
Jk(ξ) can be written as:
Jk(ξ) =1
2
ny∑
i=1
ny∑
j=1
(Dy(i)y(j)
k − 2C(i)gPCD
Xy(j)
k
+ C(i)gPCD
XXT
k (C(j)gPC)
T ). (15)
In Equation (15), the term DGk is defined
as DGk :=
∑k
τ=0[R−1τ ](i,j)Gτ where Gk ∈

IEEE TRANSACTIONS ON SIGNAL PROCESSING 5
{y(i)k y
(j)k , X(tk)y
(j)k , X(tk)(X(tk))
T }. The scalar term
[R−1k ](i,j) is the jth element in the ith row of the inverse
covariance matrix R−1k . Also, the scalar y(l) is the lth element
of the observation vector yk and C(l)gPC is the lth row of
the output matrix CgPC(ξ). Equation (15) can be updated
recursively from time tk to tk+1 since DGk+1 = DG
k +Gk+1,
and Gk is not a function of ξ. Hence, using (15), the
Bayesian posterior distribution can be calculated recursively
and evaluated at time tk for any realization of ξ; it can be
written in terms of the function Jk(ξ) as follows:
ρ(ξ|y0:k) =1
∫
exp{−Jk(ξ)}ρ(ξ)dξexp{−Jk(ξ)}ρ(ξ). (16)
Given the posterior density, the estimate of ξ is found by
calculating either the Minimum Measn Squared Error (MMSE)
estimate or the Maximum A Posteriori (MAP) estimate. The
MMSE estimate of the parameter vector ξ is calculated as
follows (see pages 350-354 of [21]):
ξ(MMSE)k = E{ξ|y0:k}
=1
∫
exp{−Jk(ξ)}ρ(ξ)dξ
∫
exp{−Jk(ξ)}ρ(ξ)dξ. (17)
Both np-dimensional integrals in (17) are integrated over the
event space of ξ. Because these integrals must be evaluated at
each time step, the MMSE estimator is more computationally
demanding than the MAP estimator. Monte Carlo integration
(see Section 6.12 of [22]) or other numerical integration
techniques can be applied to evaluate these integrals.
The MAP estimate of the unknown parameter vector ξ is
the realization of ξ that maximizes the posterior distribution
ρ(ξ|y0:k). Since the denominator of (16) is constant with
respect to ξ, the MAP estimator is given by
ξ(MAP )k = argmax
ξ
exp{−Jk(ξ)}ρ(ξ). (18)
Using the monotonic property of the logarithm function, the
MAP estimator also satisfies the following equation [20]:
ξ(MAP )k = argmin
ξ
{Jk(ξ)− log(ρ(ξ))}. (19)
The same recursive optimization strategies used in [3] for
maximizing the likelihood function can also be applied in this
paper to minimize Jk(ξ) − log(ρ(ξ)) and hence recursively
calculate ξ(MAP )k .
Higher order moments of the estimated posterior distribution
ρ(ξ|y0:k) can also be calculated. The mth moment is calcu-
lated as follows:
E{ξm|y0:k}
=1
∫
exp{−Jk(ξ)ρ(ξ)dξ
∫
ξm exp{−Jk(ξ)}ρ(ξ)dξ. (20)
These higher order moments provide valuable information
characterizing the statistical posterior distribution of the un-
known parameters. For example, the posterior variance is
calculated using the MMSE estimate and the second order
moment by var(ξ) = E{ξ2|y0:k} − (ξ(MMSE)k )2. Like the
MMSE estimate, calculations of the higher order moments
require evaluating integrals at each time step and thus require
more computational resources.
Because of polynomial chaos theory, the Bayesian posterior
density can be calculated recursively. Numerical integration
calculates MMSE estimates of ξ, and/or optimization strategies
calculate MAP estimates of ξ. State and parameter estimates
follow from Equations (4) and (5).
V. EXAMPLE
This section uses a third order differential equation to study
the proposed estimator from a pole/zero locations perspective.
For simplicity, this example only considers one unknown
parameter. The third order system is as follows:
x = Atx+BTu
yk = CTx(tk) + vk
AT :=
0 0 −11 0 −20 1 −a2
, BT :=
110
CT :=[
0 0 1]
(21)
This system of equations is asymptotically stable for a2 >1/2. This example assumes that the true value for a2 is
unknown, however, prior knowledge suggests that a2 could be
any value between 1 and 10 with equal probability. The mea-
sured (and hence known) input u is generated using a Gaussian
sequence generator with zero mean and unit variance. The
unknown noise sequence vk is generated using a Gaussian
sequence generator with zero mean and 0.0006 variance. This
corresponds to a signal-to-noise ratio (variance of yk − vkdivided by variance of vk) of 4.0.
Because the prior distribution of a2 is uniform, the ex-
pansion polynomials Φi(ξ), i = 1, . . . , r are the Legendre
polynomials (see [1], [23]) and the prior distribution of ξis uniform over the interval [−1, 1]. A Legendre polynomial
chaos expansion of the system of Equation (21) results in the
following expanded system of equations in which the state vec-
tor X contains the polynomial chaos expansion coefficients:
X = AgPCX +BgPCu
yk(ξ) = CTP(ξ)X(tk)
AgPC :=
07×7 07×7 −I7I7 07×7 −2I7
07×7 I7 −A33
BgPC :=
106×1
1013×1
CT :=[
0 0 1]
P(ξ) :=
Φ1 · · ·Φr 0 · · · 0 0 · · · 00 · · · 0 Φ1 · · ·Φr 0 · · · 00 · · · 0 0 · · · 0 Φ1 · · ·Φr
(22)
The highest order of the Legendre polynomials in the poly-
nomial chaos expansion was chosen (somewhat arbitrarily) to
IEEE TRANSACTIONS ON SIGNAL PROCESSING 6
be six, hence there are seven expansion terms (i.e. r = 7) per
original state resulting in a total of 21 states in the expanded
system (22). An ad hoc approach to determine an acceptable
value for the polynomial order is to start with a small value
and then iterate until the change in the resulting parameter
estimates between iterations is acceptably small. The term I7is the 7 × 7 identity matrix and 0j×l is the zero matrix with
dimensions j × l. The term A33 is calculated as follows:
A33
= Adiag
〈Φ1, a2Φ1〉 〈Φ1, a2Φ2〉 · · · 〈Φ1, a2Φ7〉〈Φ2, a2Φ1〉 〈Φ2, a2Φ2〉 · · · 〈Φ2, a2Φ7〉
......
. . ....
〈Φ7, a2Φ1〉 〈Φ7, a2Φ2〉 · · · 〈Φ7, a2Φ7〉
Adiag =
δ1 0 · · · 00 δ2 · · · 0...
.... . .
...
0 0 · · · δ7
δi = 〈Φi,Φi〉−1. (23)
Note that a2 = 11/2 + 9ξ/2 is an exact polynomial chaos
expansion of a2 in the sense that the prior distributions of a2and a2 are identically distributed between 1 and 10. Thus only
two polynomial chaos expansion terms are needed to represent
a2 exactly (see Equation (4)).
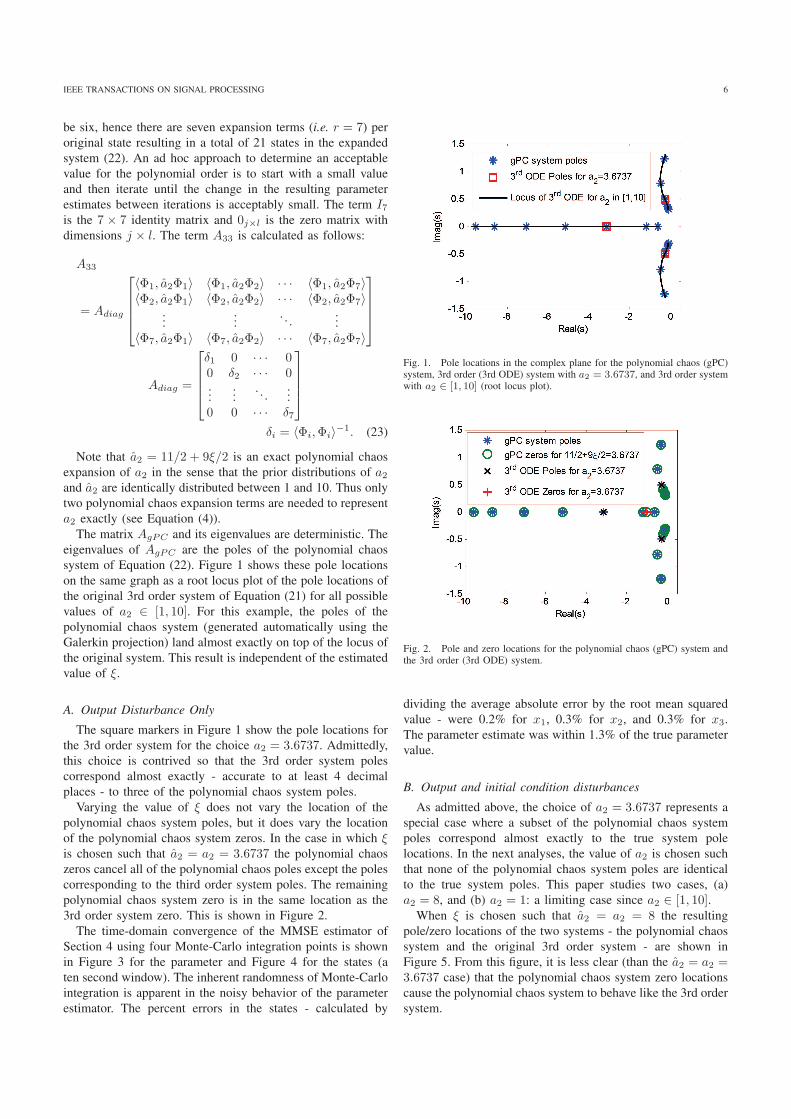
The matrix AgPC and its eigenvalues are deterministic. The
eigenvalues of AgPC are the poles of the polynomial chaos
system of Equation (22). Figure 1 shows these pole locations
on the same graph as a root locus plot of the pole locations of
the original 3rd order system of Equation (21) for all possible
values of a2 ∈ [1, 10]. For this example, the poles of the
polynomial chaos system (generated automatically using the
Galerkin projection) land almost exactly on top of the locus of
the original system. This result is independent of the estimated
value of ξ.
A. Output Disturbance Only
The square markers in Figure 1 show the pole locations for
the 3rd order system for the choice a2 = 3.6737. Admittedly,
this choice is contrived so that the 3rd order system poles
correspond almost exactly - accurate to at least 4 decimal
places - to three of the polynomial chaos system poles.
Varying the value of ξ does not vary the location of the
polynomial chaos system poles, but it does vary the location
of the polynomial chaos system zeros. In the case in which ξis chosen such that a2 = a2 = 3.6737 the polynomial chaos
zeros cancel all of the polynomial chaos poles except the poles
corresponding to the third order system poles. The remaining
polynomial chaos system zero is in the same location as the
3rd order system zero. This is shown in Figure 2.
The time-domain convergence of the MMSE estimator of
Section 4 using four Monte-Carlo integration points is shown
in Figure 3 for the parameter and Figure 4 for the states (a
ten second window). The inherent randomness of Monte-Carlo
integration is apparent in the noisy behavior of the parameter
estimator. The percent errors in the states - calculated by
Fig. 1. Pole locations in the complex plane for the polynomial chaos (gPC)system, 3rd order (3rd ODE) system with a2 = 3.6737, and 3rd order systemwith a2 ∈ [1, 10] (root locus plot).
Fig. 2. Pole and zero locations for the polynomial chaos (gPC) system andthe 3rd order (3rd ODE) system.
dividing the average absolute error by the root mean squared
value - were 0.2% for x1, 0.3% for x2, and 0.3% for x3.
The parameter estimate was within 1.3% of the true parameter
value.
B. Output and initial condition disturbances
As admitted above, the choice of a2 = 3.6737 represents a
special case where a subset of the polynomial chaos system
poles correspond almost exactly to the true system pole
locations. In the next analyses, the value of a2 is chosen such
that none of the polynomial chaos system poles are identical
to the true system poles. This paper studies two cases, (a)
a2 = 8, and (b) a2 = 1: a limiting case since a2 ∈ [1, 10].When ξ is chosen such that a2 = a2 = 8 the resulting
pole/zero locations of the two systems - the polynomial chaos
system and the original 3rd order system - are shown in
Figure 5. From this figure, it is less clear (than the a2 = a2 =3.6737 case) that the polynomial chaos system zero locations
cause the polynomial chaos system to behave like the 3rd order
system.

IEEE TRANSACTIONS ON SIGNAL PROCESSING 7
Fig. 3. Convergence of the MMSE estimator for the parameter a2.
The hypothesis that zero placement causes the polynomial
chaos system to behave like the 3rd order system is verified
from a Bode plot comparison of the two systems. The Bode
plots of the two systems are shown in Figure 6.
The time-domain convergence of the proposed MAP es-
timator of Section 4 is shown in Figure 7 and Figure 8.
In this simulation experiment, an additional disturbance was
introduced: the initial value of x3 was set to one (unknown
to the estimator which assumes that x3(0) = 0). The transient
performance of the estimator was affected, but as expected
(see Appendix A1 of [24]), the steady-state performance was
relatively unaffected as seen in Figure 7 and Figure 8. Figure 7
and Figure 8 show the convergence of the proposed MAP
estimator for two cases: (a) the estimator knows about the
initial condition disturbance x3(0) = 1, and (b) the estimator
erroneously assumes all initial conditions are zero. Even with
the unknown initial condition disturbance, the largest average
error in the state estimates was less than 4%. The parameter
estimate converged to within less than 1% of the true value.
C. Output and input (state) disturbances
When ξ is chosen such that a2 = a2 = 1 the resulting
pole/zero locations of the two systems are shown in Figure 9.
A Bode plot comparing the two systems is shown in Figure 10.
The Bode plots of the two systems do not match as well in
the frequency range [0.5, 2] radians per second as at other
Fig. 4. True and estimated states in the window [60, 70] seconds.
Fig. 5. Pole and zero locations for the polynomial chaos (gPC) system andthe 3rd order (3rd ODE) system.
frequencies. However, the polynomial chaos system closely
matches the original 3rd order system at most frequencies.
This result (and the authors’ experience in general) suggests
that the performance of the polynomial chaos based estimators
degrades near the limits (especially for systems with multiple
unknown parameters).
The time-domain convergence of the proposed MMSE es-
timator of Section 4 is shown in Figure 11 and Figure 12.
In this simulation experiment, an additional disturbance - this
time on the input signal - was introduced. The true system
input was u as usual, but the measured signal (i.e. the signal

IEEE TRANSACTIONS ON SIGNAL PROCESSING 8
Fig. 6. Bode plot of the 3rd order (3rd ODE) and polynomial chaos systemsfor a2 = a2 = 8.
Fig. 7. Parameter convergence of the MAP estimator under the assumptionsx3(0) = 1 (solid line) and x3(0) = 0 (dotted line). The true initial conditionwas x3(0) = 1. The dashed line shows the true parameter value.
used by the estimator) was u + w. The noise sequence wwas generated using a Gaussian sequence generator with zero
mean and variance 0.25. This corresponds to an input signal-
Fig. 8. True and estimated states under the assumptions x3(0) = 1 (dot-dashline) and x3(0) = 0 (solid line). The true initial condition was x3(0) = 1.The dashed line corresponds to the true states.
Fig. 9. Pole and zero locations for the polynomial chaos (gPC) system andthe 3rd order (3rd ODE) system.
to-noise ratio of four (variance of u divided by variance of
w). Figure 11 and Figure 12 show the convergence of the
parameter and state estimators for two cases: (a) without the

IEEE TRANSACTIONS ON SIGNAL PROCESSING 9
Fig. 10. Bode plot of the true (3rd ODE) system and the polynomial chaos(gPC) system.
added disturbance w, and (b) with the added disturbance w.
The largest average error, 22%, is in the estimate of state x2
under the input disturbance w. Without the input disturbance
the error in state x2 is about 13%. Even without the additional
disturbance w, the errors for this (limiting) case are greater
than for the previous cases in Sections 4.1 and 4.2. The
parameter estimate converged within 1% of the true value.
VI. CONCLUSION
This paper used polynomial chaos theory to derive new re-
cursive approaches to Bayesian state and parameter estimation
of linear time-invariant systems. It used a pole/zero and Bode
plot analysis to study the proposed estimators for a 3rd order
system with one unknown parameter. This study observed
that the expanded polynomial chaos system had eigenvalues
located on the root locus of the original 3rd order system.
The proposed estimator selected realizations of the unknown
parameter to strategically place the polynomial chaos system
zeros. This zero placement caused the higher order polynomial
chaos system to closely match the 3rd order system (as seen
in the Bode plots and the pole/zero maps). This paper showed
the convergence of the polynomial chaos estimator for the
state and parameter estimates under three different types of
disturbances: output signal noise only, output signal noise plus
initial condition disturbances, and output signal noise plus
input signal noise (i.e. state disturbances). In each case, the
parameter estimate converged to within less than 10% error.
APPENDIX
A COMMENT ON NUMERICAL IMPLEMENTATION
This section provides a useful note on numerical imple-
mentation of the MMSE and higher-order-moments estimators
Equations (17) and (20) respectively. First note, however, that
the MMSE estimator of (17) is a special case of the higher
Fig. 11. Parameter convergence for two cases: output disturbance only (Solidline) and output and input disturbance (dotted line). The dashed line showsthe true parameter value.
order moment estimator of (20) with m = 1. Therefore, the
same numerical techniques that apply to (20) also apply to
(17). The difficulty in numerically evaluating Equations (17)
and (20) is as follows: because the objective function Jk(ξ) is
essentially the summation over time of the squared difference
between y and y (see Equation (14)), its value may tend to
positive infinity as time increases. The exponential functions
in (17) and (20) quickly (exponentially) converge to zero as
the magnitude of Jk(ξ) increases. Thus, the integrals in the
numerator and denominator of (17) and (20) quickly become
smaller than the precision of the computer, and Equations (17)
and (20) have the numerical problem of dividing zero by zero.
To avoid this issue of dividing zero by zero, this section for-
mulates Equation (20) in the following manner by multiplying
by one:
E{ξm|y0:k}
=
∫
ξm exp{−Jk(ξ)}ρ(ξ)dξ∫
exp{−Jk(ξ)}ρ(ξ)dξ
exp{Jk(ξ(MMSE)k−1 )}
exp{Jk(ξ(MMSE)k−1 )}
. (24)
Here, Jk(ξ(MMSE)k−1 ) is the current cost of the previous
MMSE estimate ξ(MMSE)k−1 . The term exp{Jk(ξ
(MMSE)k−1 )}
is constant with respect to ξ and can be moved inside the

IEEE TRANSACTIONS ON SIGNAL PROCESSING 10
Fig. 12. True and estimated states. The dot-dash line is for output disturbanceonly. The solid line is for both output and input (state) disturbances. Thedashed line is the true state.
integrals of (24). The equation can then be written
E{ξm|y0:k}
=
∫
ξm exp{−Jk(ξ) + Jk(ξ(MMSE)k−1 )}ρ(ξ)dξ
∫
exp{−Jk(ξ) + Jk(ξ(MMSE)k−1 )}ρ(ξ)dξ
. (25)
The term in the exponent −Jk(ξ) + Jk(ξ(MMSE)k−1 ) is small
for some ξ (its value is zero for ξ = ξ(MMSE)k−1 and thus
Equation (25) avoids the problem of dividing zero by zero
assuming ξ(MMSE)k−1 is one of the numerical integration points.
REFERENCES
[1] D. Xiu and G. Karniadakis, “The wiener-askey polynomial chaos forstochastic differential equations,” SIAM J. on Scientific Computing,vol. 24, pp. 619–644, 2002.
[2] T. Moon and W. Stirling, Mathematical Methods and Algorithms for
Signal Processing. New Jersey: Prentice-Hall, Inc, 2000.[3] B. Pence, H. Fathy, and J. Stein, “Recursive maximum likelihood
parameter estimation for state space systems using polynomial chaostheory,” Automatica, vol. (accepted, preprint available at http://www-personal.umich.edu/ bpence/), 2011.
[4] ——, “A maximum likelihood approach to recursive polynomial chaosparameter estimation,” in Proc. 2010 American Control Conference -
ACC 2010, Baltimore, MD, USA, 30 June-2 July 2010.[5] D. Simon, Optimal State Estimation: Kalman, H infinity, and Nonlinear
Approaches. New Jersey: John Wiley and Sons Inc., 2006.[6] E. Blanchard, A. Sandu, and C. Sandu, “A polynomial-chaos-based
bayesian approach for estimating uncertain parameters of mechanicalsystems,” 19th Int. Conf. on Des. Theory and Method.; 1st Int. Conf.
on Micro- and Nanosys.; and 9th Int. Conf. on Adv. Vehicle Tire Tech.,
Parts A and B, vol. 3, pp. 1041–1048, 2008.[7] ——, “A polynomial chaos-based kalman filter approach for parameter
estimation of mechanical systems,” Paper no. 061404, ASME J. of
Dynamic Systems Measurement and Control, Special Issue on Physical
System Modeling, vol. 132, 2010.[8] Y. Marzouk and D. Xiu, “A stochastic collocation approach to bayesian
inference in inverse problems,” Comm. in Comp. Physics, vol. 6, pp.826–847, 2009.
[9] Y. Marzouk, N. Najm, and L. Rahn, “Stochastic spectral methods forefficient bayesian solution of inverse problems,” J. Comp. Physics, vol.224, pp. 560–586, 2007.
[10] J. Li and D. Xiu, “A generalized polynomial chaos based ensemblekalman filter with high accuracy,” J. of Comp. Physics, vol. 228, pp.5454–5694, 2009.
[11] G. Saad, R. Ghanem, and S. Masri, “Robust systemidentification of strongly non-linear dynamics using apolynomial chaos based sequential data assimilationtechnique,” Col. of Tech. Papers, 48th AIAA/ASME/
ASCE/AHS/ASC Struc., Struc. Dyn. and Mat. Conf., vol. 6, pp.6005–6013, 2007.
[12] A. Smith, A. Monti, and F. Ponci, “Indirect measurements via apolynomial chaos observer,” IEEE Trans. on Instr. and Meas., vol. 56,pp. 743–752, 2007.
[13] S. Southward, “Real-time parameter id using polynomial chaos expan-sions,” Proc. of ASME Int. Mech. Eng. Congress and Expo., vol. 9, pp.1167–1174, 2008.
[14] S. Shimp, “Vehicle sprung mass identification using an adaptivepolynomial-chaos method,” Masters Thesis, 2008.
[15] B. Pence, H. Fathy, and J. Stein, “A base-excitation approach to poly-nomial chaos-based estimation of sprung mass for off-road vehicles,”Proc. ASME Dyn. Sys. and Control Conference 2009, vol. DSCC2009,n PART A, pp. 857–864, 2010.
[16] P. Dutta and R. Bhattacharya, “Nonlinear estimation of hypersonic statetrajectories in bayesian framework with polynomial chaos,” Journal of
Guidance, Control, and Dynamics, vol. 33, pp. 1765–1778, 2010.[17] R. Ghanem and P. Spanos, Stochastic finite elements: A spectral ap-
proach. New York: Springer-Verlag, 1991.[18] N. Wiener, “The homogenous chaos,” Amer. J. Math., vol. 60, pp. 897–
936, 1938.[19] C.-T. Chen, Linear System Theory and Design, 3rd Edition. New York
Oxford: Oxford University Press, 1999.[20] E. Blanchard, A. Sandu, and C. Sandu, “Parameter estimation for
mechanical systems via an explicit representation of uncertainty,” Engi-
neering Computations, vol. 26, pp. 541–569, 2009.[21] J. A. Gubner, Probability and Random Processes for Electrical and
Computer Engineers. New York: Cambridge University Press, 2006.[22] H. M. Antia, Numerical Methods for Scientists and Engineers, 2 ed.
Boston: Birkhauser Verlag, 2002.[23] A. D. Poularikas, The Handbook of Formulas and Tables for Signal
Processing. Boca Raton: CRC Press LLC, 1999.[24] B. Pence, “Recursive parameter estimation using polynomial chaos
theory applied to vehicle mass estimation for rough terrain,” Ph.D.dissertation, Univ. of Michigan, USA, 2011. [Online]. Available:http://www-personal.umich.edu/ bpence/