identificaciÓn de normalidad y...
TRANSCRIPT

IDENTIFICACIÓN DE NORMALIDAD Y ANORMALIDAD
EN LA RODILLA UTILIZANDO SEÑALES EMG
30 de mayo de 2014
MARCELO HERRERA GONZALEZ
GUSTAVO ADOLFO MARTINEZ HERNANDEZ
Universidad Autónoma de Manizales

IDENTIFICACIÓN DE NORMALIDAD Y ANORMALIDAD EN LA RODILLA UTILIZANDOSEÑALES EMG
MARCELO HERRERA GONZÁLEZ, GUSTAVO ADOLFO MARTÍNEZ
Tesis de Grado presentada para optar al título de Magíster en Mecatrónica y Control
DirectorPh.D José Luis Rodríguez Sotelo
DirectorPh.D Oscar Fernando Avilés Sánchez
UNIVERSIDAD AUTÓNOMA DE MANIZALES
MAESTRÍA EN MECATRÓNICA Y CONTROL MANIZALES(I COHORTE)
2014

Dedicatoria
Mi tesis se la dedico con todo amor y cariño a la memoria de mi padre, modelo a seguir como serintegro, afectuoso y responsable, a mi madre por ser el pilar, soporte y motivación de mi vida, a mihermana que siempre me dio ánimos para seguir adelante en tan duros momentos, a mi novia y aquienes aportaron y me acompañaron en este proceso, por último a Marcelo gran amigo y quién meapoyo con decisión en este proceso de maestría.
Gustavo
Este trabajo lo dedicó a Dios por guiarme, a Ana María por su incondicional amor en los momentosbuenos y malos de los últimos años, a mi hijo Juan José que es esa pequeña gran razón parasuperarme, a mi padre y mi madre que son el faro fundamental en mi vida, siempre quisieron lomejor para mí y me dieron siempre todo su apoyo, y a Gustavo por su amistad y su aporte a estetrabajo de grado. Con todo cariño dedico este esfuerzo a todos ellos.
Marcelo

Agradecimientos
Queremos agradecer a nuestros directores, José Luis Rodríguez y Oscar Fernando Avilés, por todasu colaboración, asesoría y apoyo incondicional durante todo el proceso. Al grupo de investigaciónDAVINCI de la Universidad Militar Nueva Granada en la ciudad de Bogotá, por prestarnos su ayudaen la primera toma de muestras; incluyendo la consecución de pacientes. También queremos dar lasgracias a Tecnoparque SENA nodo Manizales por el préstamo de sus equipos para la parte �nal delproyecto. A las Fisioterapeutas Martha María Arevalo Calixto, Luz Dary Rodríguez Sotelo y a laDoctora Francia Restrepo por sus asesorías en todos los temas de rehabilitación. A Abilo Andrés y aDiego Andrés por su ayuda y �nalmente a los soldados del Batallón de Sanidad en la ciudad de Bogotáy a todas las personas que se ofrecieron como voluntarios en la ciudad de Manizales para la toma demuestras.
Índice
1. INTRODUCCIÓN 1
2. PRELIMINARES 22.1. Delimitación del área temática . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22.2. Delimitación del área problemática . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.3. Formulación del problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.4. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.5. Objetivo General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.6. Objetivos especí�cos al primer objetivo general . . . . . . . . . . . . . . . . . . . . . . . 52.7. Objetivos especí�cos al segundo objetivo general . . . . . . . . . . . . . . . . . . . . . . 52.8. Justi�cación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3. MARCO DE REFERENCIA 73.1. La rodilla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1.1. Biomecánica de la rodilla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.1.2. Músculos asociados a la rodilla . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.2. Patologías de la rodilla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.2.1. Osteoartritis (OA) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.2.2. Lesión en el ligamento cruzado anterior . . . . . . . . . . . . . . . . . . . . . . . 123.2.3. Problemas en el nervio ciático . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.2.4. Lesión de menisco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.2.5. Fractura de rodilla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.3. Modelado cinemático y dinámico de la rodilla . . . . . . . . . . . . . . . . . . . . . . . . 133.3.1. Modelo cinemático . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.3.2. Modelo Dinámico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.4. Electromiografía . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.4.1. Protocolos de medida EMG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.4.2. Sujetos de prueba (antecedentes) . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.5. Métodos de análisis de señales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.5.1. Caracterización de las señales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.5.2. Transformada de Fourier en tiempo corto (STFT) . . . . . . . . . . . . . . . . . 223.5.3. Transformada Wavelet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.5.4. Análisis de componentes principales . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.6. Clasi�cadores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.6.1. Redes neuronales Arti�ciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.6.2. Análisis discriminante Lineal (LDA) . . . . . . . . . . . . . . . . . . . . . . . . . 293.6.3. Máquina de vectores de soporte (SVM) . . . . . . . . . . . . . . . . . . . . . . . 303.6.4. K vecinos cercanos (KNN) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.7. Algoritmos de agrupamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.7.1. Agrupamiento basado en centroides . . . . . . . . . . . . . . . . . . . . . . . . . 323.7.2. k-medias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.7.3. h-medias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32

4. MARCO EXPERIMENTAL 334.1. Protocolo de medición . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.1.1. Criterios y variables de exclusión e inclusión . . . . . . . . . . . . . . . . . . . . . 334.1.2. Valores antropomór�cos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.1.3. Prueba física: Adquisición de valores cinemáticos y señales EMG . . . . . . . . . 34
4.2. Instrumentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.2.1. Primer equipo de toma de muestras . . . . . . . . . . . . . . . . . . . . . . . . . 354.2.2. Metodología QFD para el diseño del goniómetro . . . . . . . . . . . . . . . . . . 364.2.3. Segundo equipo de toma de muestras . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.3. Modelo del movimiento de la rodilla (Velocidad y Aceleración) . . . . . . . . . . . . . . 484.4. Procesamiento de la señal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.4.1. Selección de las señales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.4.2. Preprocesamiento de la señal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.4.3. Caracterización de la señal EMG . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.4.4. Caracterización de las señales de movimiento . . . . . . . . . . . . . . . . . . . . 52
4.5. Clasi�cación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534.5.1. Entradas escogidas para la clasi�cación . . . . . . . . . . . . . . . . . . . . . . . 534.5.2. ANN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.5.3. Otros algoritmos de clasi�cación . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5. RESULTADOS Y DISCUSIONES 565.1. Toma de muestras a sujetos de prueba y valores antropomór�cos . . . . . . . . . . . . . 565.2. Prueba Física . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.2.1. Señales EMG en pierna para movimiento en cadena cinemática abierta simple(�exión sentado) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.2.2. Señales EMG en pierna para movimiento en cadena cinemática abierta simple(Erguido) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.2.3. Señales EMG en pierna para marcha simple . . . . . . . . . . . . . . . . . . . . 625.3. Goniómetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.3.1. Resultados del goniómetro desarrollado . . . . . . . . . . . . . . . . . . . . . . . 635.3.2. Comparación entre el goniómetro desarrollado y el goniómetro Biometrics . . . 63
5.4. Base de datos (Formato) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 665.5. Resultados de los registros de goniometría, velocidad y aceleración . . . . . . . . . . . . 675.6. Clasi�cación de las características en las 3 clases . . . . . . . . . . . . . . . . . . . . . . 69
5.6.1. Marcha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 695.6.2. Sentado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 705.6.3. Pie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.7. Relevancia de las características EMG y goniometría . . . . . . . . . . . . . . . . . . . . 745.8. Metodología propuesta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
6. CONCLUSIONES 77
7. RECOMENDACIONES Y TRABAJO FUTURO 79

Índice de �guras
1. Rodilla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72. Músculo recto femoral. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93. Músculo Vasto Medial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94. Músculo Bíceps Femoral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105. Músculo Semitendinoso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106. Articulación Sinovial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117. Diagrama de eslabones de miembro inferior . . . . . . . . . . . . . . . . . . . . . . . . . 138. Cadena cinética abierta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169. Modelo dinámico de miembros inferiores. . . . . . . . . . . . . . . . . . . . . . . . . . . 1710. Señal EMG y su espectro de potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1811. Familias de Wavelet Madre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2312. Red neuronal tipo MLP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2813. SVM lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3014. Electromiógrafo Sierra Cadwell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3615. Diagrama de a�nidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4116. Goniómetro (Vistas) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4617. Miniature DataLog MWX8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4718. Goniómetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4819. Electrodo de medida super�cial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4820. Matriz de confusión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5421. Ubicación de los electrodos super�ciales para la prueba física . . . . . . . . . . . . . . . 5922. Ubicación del goniómetro para la prueba física . . . . . . . . . . . . . . . . . . . . . . . 5923. Cadena Cinemática Abierta (Flexión sentado) . . . . . . . . . . . . . . . . . . . . . . . 6024. Señales adquiridas para Cadena Cinemática Abierta (Flexión sentado) . . . . . . . . . . 6025. Cadena Cinemática Abierta Simple (Erguido) . . . . . . . . . . . . . . . . . . . . . . . . 6126. Señales adquiridas para Cadena Cinemática Abierta Simple (Erguido) . . . . . . . . . . 6127. Marcha simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6228. Señales adquiridas para marcha simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6229. Goniómetro desarrollado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6330. Pruebas con el goniómetro desarrollado . . . . . . . . . . . . . . . . . . . . . . . . . . . 6431. Pruebas con el goniómetro Biometrics . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6432. Comparación entre goniómetro linealizado y el goniómetro Biometrics . . . . . . . . . . 6533. Respuesta del goniómetro linealizado Vs goniómetro Biometrics en CCA sentado . . . . 6634. Relevancia de características en marcha . . . . . . . . . . . . . . . . . . . . . . . . . . . 7435. Relevancia de características sentado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7436. Relevancia de características en pie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7537. Metodología propuesta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7638. Plano del goniómetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92

Índice de cuadros
1. Parámetros DH de la pierna derecha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142. Parámetros DH de la pierna Izquierda . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153. Características del goniómetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404. Factores de desarrollo del dispositivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415. Prioridades de requerimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426. Evaluación de los clientes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427. Matriz de relaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 448. Evaluación de ingeniería . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 459. Especi�caciones técnicas del Datalog MWX8 . . . . . . . . . . . . . . . . . . . . . . . . 4710. Parámetros DH en rodilla para cadena cinética abierta . . . . . . . . . . . . . . . . . . . 4911. Formato de medidas iniciales en la prueba física . . . . . . . . . . . . . . . . . . . . . . . 5613. Medidas antropomór�cas del grupo de control . . . . . . . . . . . . . . . . . . . . . . . . 5712. Medidas antropomór�cas de los sujetos de prueba con patología de rodilla . . . . . . . . 5814. Consolidado ángulos de desplazamiento (Sentado) . . . . . . . . . . . . . . . . . . . . . . 6815. Consolidado ángulos de desplazamiento (Marcha) . . . . . . . . . . . . . . . . . . . . . . 6816. Consolidado ángulos de desplazamiento (Pie) . . . . . . . . . . . . . . . . . . . . . . . . 6917. Matriz de resultados de los clasi�cadores lineales (Marcha) . . . . . . . . . . . . . . . . 6918. Matriz de resultados de los clasi�cadores no lineales (Marcha) . . . . . . . . . . . . . . . 7019. Matriz de resultados de los clasi�cadores lineales (Sentado) . . . . . . . . . . . . . . . . 7120. Matriz de resultados de los clasi�cadores no lineales (Sentado) . . . . . . . . . . . . . . 7221. Matriz de resultados de los clasi�cadores lineales (Pie) . . . . . . . . . . . . . . . . . . . 7222. Matriz de resultados de los clasi�cadores no lineales (Pie) . . . . . . . . . . . . . . . . . 73
Abreviaturas
Notación Signi�cado
ACL Ligamento Cruzado anterior
ANN Redes neuronales arti�ciales
CCA Cadena Cinética Abierta
CCC Cadena Cinética cerrada
CWT Transformada Wavelet Continua
DH Parametros de Denavit-Hartenberg
DWT Transformada Wavelet Discreta
EMG Electromiografía
LCL Ligamento Lateral Colateral
MCL Ligamento Medio Colateral
MU Unidades Motoras
MUAP Potencial de unidades motoras
OA Osteoartritis de Rodilla
PCL Ligamento Cruzado Posterior
STFT Transformada de Fourier en tiempo corto
TFD Distribución en tiempo-frecuencia
WT Transformada Wavelet
1. INTRODUCCIÓN
En este trabajo se establecen algunos elementos importantes para estimar la relación entre la nor-malidad y la anormalidad en la rodilla humana, a través del análisis de las señales electromiográ�cas(EMG) en cuatro músculos (Bíceps femoral, Recto femoral, Vasto medial, y Semitendinoso) asociadosa la articulación. Para ello, se debe construir una prueba física estandarizada, para que a través de dife-rentes test musculares se puedan registrar las respuestas de los cuatro músculos medidos, y el conjuntode los ángulos del movimiento de la rodilla en �exión-extensión, a través de un dispositivo de instru-mentación. Para lograr lo anterior, se deben generar los movimientos musculares apropiados, escogery determinar la cantidad y los criterios de inclusión y exclusión de sujetos de prueba. Finalmente, ycomo una necesidad del primer equipo de toma de muestras, se propone y construye un goniómetro,para registrar los ángulos generados en la articulación de la rodilla en plano sagital, para cada uno delos movimientos musculares.
Con las señales EMG y el registro de ángulos se realizará un procesamiento y caracterización, paradeterminar cuáles elementos permiten un mayor potencial de detección de normalidad o anormalidad.El procesamiento se realizará mediante un �ltrado o suavizado de la señal, en la caracterización seusarán diversas técnicas de análisis espectral y de distribuciones tiempo-frecuencia. Con los registrosde ángulos se obtendrán los registros de velocidad y aceleración para tener un conglomerado de todoslos elementos del movimiento.
Por último, se clasi�carán las características EMG y las características obtenidas de los registros demovimiento -ángulo (desplazamiento), velocidad y aceleración- unidas y por separado, para buscar larelación entre los 2 registros, y por medio de análisis estadístico determinar la independencia de EMGcon el registro de movimiento.Es importante resaltar que los resultados de esta investigación están enfocados en dar soporte alprofesional en rehabilitación en el diagnóstico individual del paciente que se esté estudiando.
En el primer capítulo de este trabajo están los preliminares, donde se encontrarán los elementosiniciales de la investigación como son: el área problemática, el área temática, la formulación del pro-blema y los objetivos. En el segundo capítulo se encuentra el marco de referencia donde se revisaráel estado del arte de la articulación de rodilla (características, patologías y modelado), de las señalesEMG y su uso en descubrimiento de miopatías y los diferentes métodos de análisis de señales (ca-racterización y clasi�cación). En el marco experimental se describe la metodología para establecer laprueba Física, el método de diseño para la calidad (QFD) para la construcción del goniómetro, losparámetros Denavit�Hartenberg (DH) para la articulación de la rodilla y las diversas posibilidades quese aplican para la caracterización y clasi�cación de las señales. En el cuarto capítulo se presentan losresultados y discusión de las pruebas realizadas, la construcción de la base de datos de señales EMGy el registro de ángulos. Cuáles son las características con mayor nivel de predicción, los resultados dela clasi�cación, las respuestas a la relación de señales y la valoración usando análisis estadístico, asícomo las respectivas discusiones e inferencias de los resultados individuales y sus conglomerados. Enlas conclusiones se determina a través de los resultados, el cumplimiento de los objetivos planteados.Finalmente, en las recomendaciones y trabajo futuro se plantean algunas sugerencias acerca del caminopor seguir con los resultados de esta investigación.
1
2. PRELIMINARES
2.1. Delimitación del área temática
Las lesiones en la rodilla se presentan por diferentes causas, entre ellas las ocasionadas por acciden-tes, los cuales pueden ser de origen ocupacional como las militares [1], deportivas [2], entre otras. Porotra parte hay lesiones causadas por enfermedades degenerativas como la artrosis [3] (OA) de rodilla.Sin importar el tipo de lesión presente en la rodilla, la deformación y la limitación en el movimiento deesta son evidentes [4], haciendo necesarios tratamientos �sioterapéuticos y de rehabilitación. Para es-tos tratamientos se pueden emplear diferentes elementos tales como prótesis, sillas de ruedas, muletas,órtesis, exoesqueletos que ayudan a superar la limitación en ciertos niveles, que abarcan la reduccióndel dolor, normalizar la movilidad, aumentar la musculatura, etc.; y por ende mejorar la calidad devida del ser humano que las presenta.
Dentro de las lesiones en la rodilla, se presentan algunas por daños en las estructuras ligamentosas,las más comunes son la ruptura en ligamento lateral (LL), ruptura en ligamento cruzado posterior(PCL) y ligamento cruzado anterior (ACL), donde esta última es la más representativa de las lesionesque se producen [5]. También se pueden tener lesiones en el menisco [6], fractura en la rótula [7],esguinces y hasta lesiones en los tendones como la tendinitis rotuliana [8].
La rodilla es una unión con un rango de movimiento de -5.1° (hiperextensión) hasta 105.1° [9] enel plano sagital, y está conformada por la articulación del fémur distal, tibia proximal y la rótula.Cuatro ligamentos proveen la mayor parte de la estabilidad de la unión, el ACL y el PCL previenenel movimiento anterior y posterior de la tibia sobre el fémur, mientras el ligamento medial colateral(MCL) y el ligamento lateral colateral (LCL) hacen resistencia a la deformación del varus y el valgus[10].
Se ha publicado el tipo y la frecuencia de las lesiones de rodilla, como un estudio en el cual sedocumentaron 17,397 pacientes con 19,530 lesiones deportivas en un lapso de 10 años. Mostró que6434 (37%) tuvieron 7769 lesiones (39,8%) relacionadas con la articulación de la rodilla [2].
Son múltiples las técnicas utilizadas (ejercicios isométricos, cadena cinética abierta (CCA), cadenacinética cerrada (CCC), recuperación aeróbica, etc.) en la recuperación muscular de las lesiones derodilla [11].
En cuanto al análisis funcional de la rodilla, una de las principales herramientas utilizadas es lamedición de señales electromiográ�cas EMG, debido a que esta técnica evalúa y registra la activación dela señales musculares [12] y provee información en tiempo-frecuencia sobre la actividad neuromuscularpresente en el músculo activo, correspondiente a la suma de la actividad de un número mayor deunidades motoras más pequeñas [13]. Para que tenga mayor validez el estudio se debe relacionar lasseñales EMG con los valores cinemáticos del movimiento en �exión y extensión en plano sagital [14, 15].
2
2.2. Delimitación del área problemática
El análisis de señales electromiográ�cas (EMG) del sistema muscular de los componentes anató-micos de la rodilla [16, 17], es un interrogante abierto para nuestra investigación. Actualmente, variasaplicaciones están enfocadas en el estudio de señales EMG [18, 19, 20, 21], en particular, el estudiooperativo de los músculos y las uniones neuromusculares en rehabilitación, el análisis del impacto deltrabajo �siológico y el músculo en el campo de los deportes (fatiga muscular) [15, 14].
Existen indicios de que una lesión de rodilla puede ser clasi�cada con los patrones EMG en personascon rodilla normal y en quienes presentan patología de alteración de sus estructuras ligamentosas [22],también se pueden estudiar los patrones electromiográ�cos en los seis músculos que intervienen ensu función: recto femoral (RF), vasto lateral (VL), vasto medial (VM), semitendinoso (ST), bícepsfemoral (BF) y el gemelo interno (GS) o modelar la estabilidad de la rodilla después de sufrir unalesión, usando ejercicios isocinéticos con un dispositivo asistido [23, 24].
Adicionalmente, se han hecho modelos cinemáticos y dinámicos de la rodilla, para caracterizar lospatrones de movimiento de �exo-extensión [25], como: escalada, marcha, �exión, sentarse y ponersede pie, entre otros. También se han realizado modelados de la rodilla frente algunas patologías comola artrosis y otras enfermedades in�amatorias, para la implementación de prototipos mecánicos deasistencia [26, 27, 28].
En la toma de muestras de señales EMG, se debe hacer un preprocesamiento digital de la señal,debido a los diversos ruidos que se suman a la medición [29, 30]. En cuanto a la toma de muestrasEMG se recomienda modelar la cinética y cinemática de la rodilla porque además de darle validez alas medidas puede proveer información valiosa sobre la interpretación de las señales EMG [24].
Cuando se caracterizan los patrones de las señales EMG y se modela cinemática o dinámicamentecualquier sistema músculo-esquelético se obtienen diferentes variables, siendo necesaria la aplicaciónde métodos estadísticos avanzados para la estimación e identi�cación [31, 24, 32].
3
2.3. Formulación del problema
¾Es posible encontrar elementos que permitan detectar la relación entre normalidad o anormalidaden la rodilla en un sujeto especí�co usando señales electrómiográ�cas?
4
2.4. Objetivos
2.5. Objetivo General
1. Construir una base de datos con señales EMG de la rodilla, utilizando una prueba estandarizada,en un hardware de medición como referencia en normalidad o anormalidad en la valoración derodilla.
2. Implementar una metodología para la valoración automática del grado de normalidad de rodillaen sujetos especí�cos usando métricas creadas a partir de la base de datos.
2.6. Objetivos especí�cos al primer objetivo general
1. Determinar y estandarizar una prueba física cuyo registro EMG genere información útil paradetectar normalidad o anormalidad en la rodilla.
2. Desarrollar un sistema de instrumentación que complemente el registro EMG, mediante la me-dición de ángulos durante la prueba.
3. Construir la base de datos a partir de sujetos previamente valorados por un profesional.
2.7. Objetivos especí�cos al segundo objetivo general
1. Preprocesar las señales EMG y el correspondiente registro de velocidad y posición para los múscu-los que intervienen en el proceso de movimiento de la rodilla, para resaltar las características conpotencial de predicción de porcentaje de normalidad.
2. Determinar la normalidad o anormalidad con los parámetros extraídos con mayor potencial depredicción del registro de la prueba.
3. Implementar una metodología que utilice la caracterización desarrollada para generar una valo-ración en sujetos especí�cos como soporte al diagnóstico del especialista.
4. Desarrollar un modelo del movimiento de la rodilla en �exión-extensión en el plano sagital con el�n de establecer relaciones entre la velocidad y aceleración con el método de análisis de señalesEMG.
5

2.8. Justi�cación
La rehabilitación de rodilla conlleva, en muchos casos, difíciles terapias de trabajo físico que nosiempre producen una recuperación adecuada. Existen diversos dispositivos de asistencia para los tra-tamientos en la rodilla lesionada. Hay una serie de dispositivos enfocados directamente en optimizarla marcha o incrementar la fuerza de los miembros inferiores tales como: el AKROD de la universi-dad de Northeastern [33, 34], Yobotics's RoboKnee [28], The Berkeley Lower Extremity Exoskeleton
[28], asistente híbrido japonés de extremidades (HAL), Hocoma's Lokomat system, y el prototipo derehabilitación NTULEE [35, 36]. Para un uso natural de estos dispositivos se pueden usar las señaleselectromiográ�cas como señales de biocontrol. Las señales EMG tienen como objetivo medir la varia-ción del potencial eléctrico en los músculos, que sirve para estimar la intención de movimiento, como esel caso de la rehabilitación de pacientes con desorden neurológico [27], en donde se busca la intenciónde movimiento en cadera y rodilla para controlar el movimiento del exoesqueleto. También se hanusado las señales EMG para controlar la torsión [37].
Para realizar este biocontrol de una manera óptima se debe caracterizar las señales EMG, paradeterminar cuándo se tiene una lesión de rodilla y cuándo no, para evitar futuras lesiones mediante eluso de exoesqueletos [37], ó la generación de planeación de terapias más adecuadas de rehabilitaciónde la rodilla.
Para los miembros superiores se han relacionado el movimiento de la muñeca y los dedos con suposición [38], en miembro inferior se han relacionado la fuerza y la fatiga muscular usando señales EMG[15]. Por último, se pueden encontrar estudios y análisis enfocados en la respuesta EMG en �exión yextensión máxima de la rodilla para normalizar los ángulos o calcular los picos de torsión permitidos[39, 18, 40].
Dado el crecimiento en el uso de sistemas asistidos para rehabilitación [41, 42], se pretende llegara un sistema que suministre información relevante al profesional encargado de la terapia, sobre: lasituación actual del sujeto en rehabilitación, el porcentaje de normalidad, la aceleración, velocidady la amplitud de movimiento lograda en el patrón de recolección de datos. Con esta información, elprofesional encargado podría según su criterio usar los resultados para aplicarlo a un tratamiento másespecí�co y adecuado al sujeto (soporte diagnóstico).
6
3. MARCO DE REFERENCIA
3.1. La rodilla
En esta sección se exponen todas las partes de la articulación de la rodilla humana: ligamentos,músculos y huesos, además se muestra como se logra el movimiento de la articulación; relacionandosus diferentes partes y detallando sus funcionalidades.
Los componentes primordiales de la rodilla son: el fémur, la tibia y la rótula que participan en elmovimiento. La tibia está ubicada medialmente en la pierna; se articula con el fémur y soporta el pesodel cuerpo y lo transmite del fémur al pie, la tibia se encuentra verticalmente y es más fuerte que elperoné que la acompaña. La rodilla tiene 2 meniscos uno medial y el otro lateral, que están encargadosde absorber el impacto. La rótula es un hueso que está anclado a la tibia por el tendón rotuliano, quees el límite superior del tendón del músculo cuádriceps, es esencial en el movimiento de extensión. Larótula tiene una super�cie articular dividida en dos partes, formando un sello. Al mover la tibia sobreel fémur, la rótula se desliza a través de los cóndilos femorales [43, 44, 45].
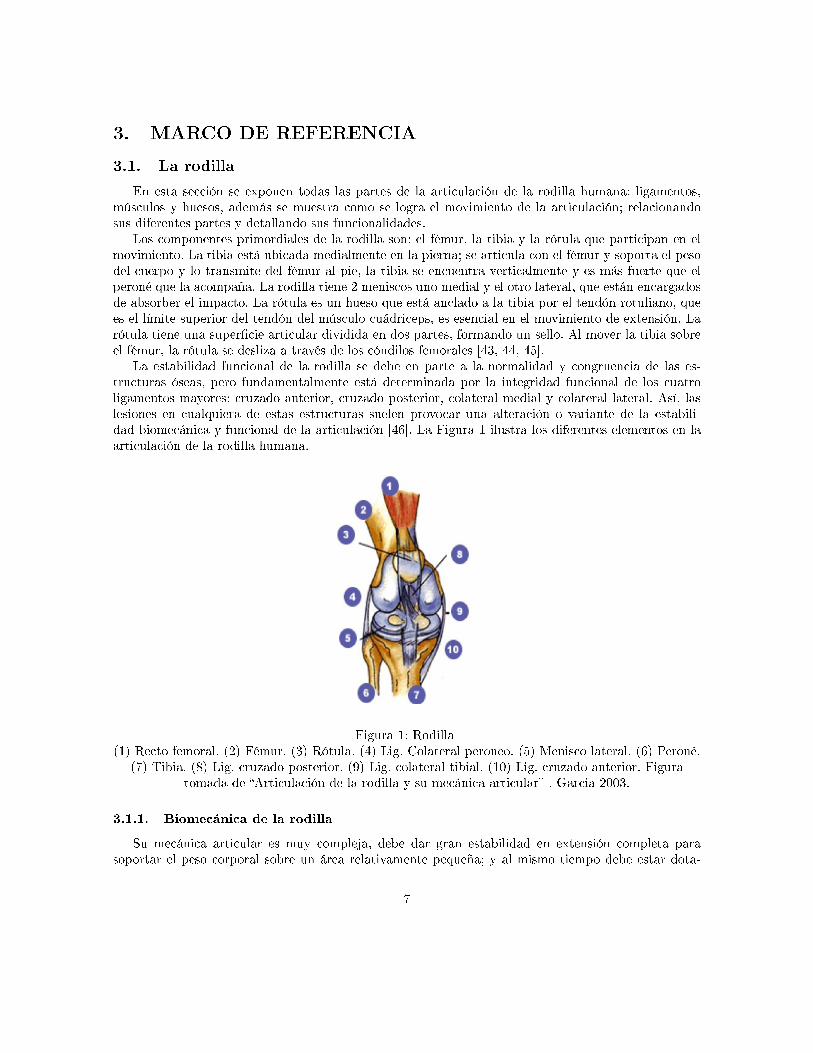
La estabilidad funcional de la rodilla se debe en parte a la normalidad y congruencia de las es-tructuras óseas, pero fundamentalmente está determinada por la integridad funcional de los cuatroligamentos mayores: cruzado anterior, cruzado posterior, colateral medial y colateral lateral. Así, laslesiones en cualquiera de estas estructuras suelen provocar una alteración o variante de la estabili-dad biomecánica y funcional de la articulación [46]. La Figura 1 ilustra los diferentes elementos en laarticulación de la rodilla humana.
Figura 1: Rodilla(1) Recto femoral. (2) Fémur. (3) Rótula. (4) Lig. Colateral peroneo. (5) Menisco lateral. (6) Peroné.
(7) Tibia. (8) Lig. cruzado posterior. (9) Lig. colateral tibial. (10) Lig. cruzado anterior. Figuratomada de �Articulación de la rodilla y su mecánica articular� . Garcia 2003.
3.1.1. Biomecánica de la rodilla
Su mecánica articular es muy compleja, debe dar gran estabilidad en extensión completa parasoportar el peso corporal sobre un área relativamente pequeña; y al mismo tiempo debe estar dota-
7
da de la movilidad necesaria para la marcha y para orientar e�cazmente al pie en relación con lasirregularidades del terreno [44].
La articulación de la rodilla se compone de la articulación femorotibial y la articulación femoro-rrotuliana [47]. La primera tiene 2 grados de libertad uno de rotación y el otro de �exión-extensión,esto se logra gracias a que la articulación femorotibial se divide en 2 cámaras: la proximal o superior,que corresponde a la articulación femoromeniscal (�exión-extensión); y la distal o inferior, que corres-ponde a la articulación meniscotibial y permite los movimientos de rotación de la pierna. En cuantoa la articulación femorrotuliana constituye una articulación por deslizamiento; es de menor área quela unión femorotibial y protege por delante el conjunto articular, además, eleva al mismo tiempo almúsculo cuadríceps, permitiendo que las tracciones de este sobre la tibia sean mayores debido a queestán con un cierto ángulo de inclinación y no en sentido paralelo [47, 44].
La rodilla permite 3 movimientos básicos:
1. Flexión-extensión: La cara posterior de la pierna se aproxima a la cara posterior del muslo enla �exión, pero sucede lo contrario durante el movimiento de extensión. A partir de la posición0° (posición de reposo: cuando el muslo y la pierna se prolongan entre sí en línea recta, formandoun ángulo de 180°), la �exión de la pierna alcanza por término medio 130°; sin embargo, si lacadera se encuentra en una posición de hiperextensión, el rango podrá disminuir a un valor de120°. En una �exión máxima de cadera, el rango puede aumentar hasta 160° [48, 49, 50].
2. La rotación axial: Consiste en la libre rotación de la pierna, o sea, cuanto la tibia comoel peroné giran alrededor del eje longitudinal o vertical de la primera, en sentido externo ointerno. La rodilla puede realizar solamente estos movimientos de rotación cuando se encuentraen posición de semi�exión. La máxima rotación se consigue con la rodilla en semi�exión de 90°.La rotación externa es siempre más amplia que la interna (4 veces mayor, aproximadamente). Enla rotación interna, el fémur gira en rotación externa con respecto a la tibia y arrastra la rótulahacia afuera [45, 50].
3. La rotación de terminal o automático: Normalmente, cuando la rodilla se mueve en exten-sión, la tibia rota externamente aproximadamente 20 grados �jados en el fémur. Este movimientose puede observar en los últimos 20 grados de extensión de la rodilla y es llamado terminal derotación de la rodilla. Este movimiento es puramente mecánico, se produce en la extensión pasivay activa de la rodilla, y no puede ser prevenido o producido voluntariamente. Este mecanismoproporciona estabilidad para resistir las fuerzas mecánicas que se producen en el plano sagital ypermite permanecer de pie sin la contracción de los músculos cuádriceps [45, 50].
3.1.2. Músculos asociados a la rodilla
Son múltiples los músculos que intervienen en la biomecánica de la rodilla y son varios los movimien-tos que pueden realizarse, sin embargo, se requiere especí�camente medir las señales en movimientode �exión-extensión, donde se activan los músculos gracias a una contracción de los mismos. Por lotanto, se escogen 2 músculos asociados directamente a la extensión y 2 músculos asociados a la �exión,y además, que se usen comúnmente en la rehabilitación de la articulación [51, 50].
A continuación se relacionan los músculos con su respectiva acción y uso clínico.
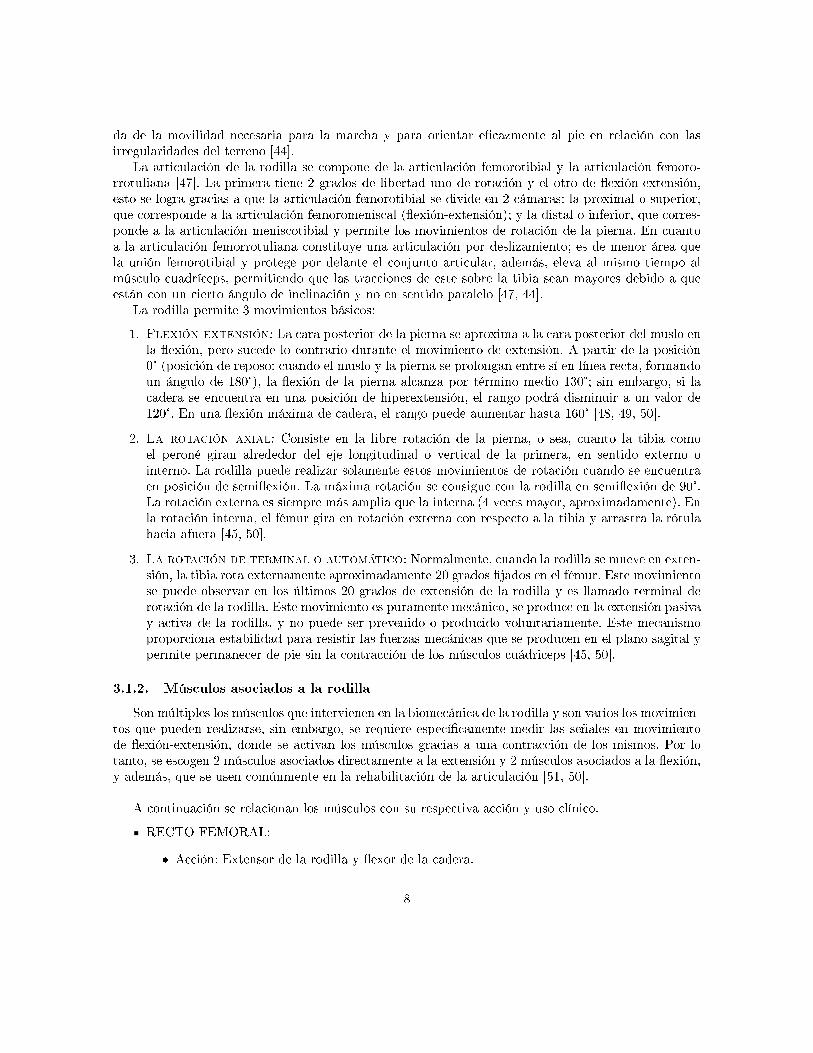
RECTO FEMORAL:
� Acción: Extensor de la rodilla y �exor de la cadera.
8
� Uso clínico: Rehabilitación de cadera y rodilla.
Figura 2: Músculo recto femoral.Figura tomada de �Bones and muscles: an illustrated anatomy�. Cantarella 1999.[52]
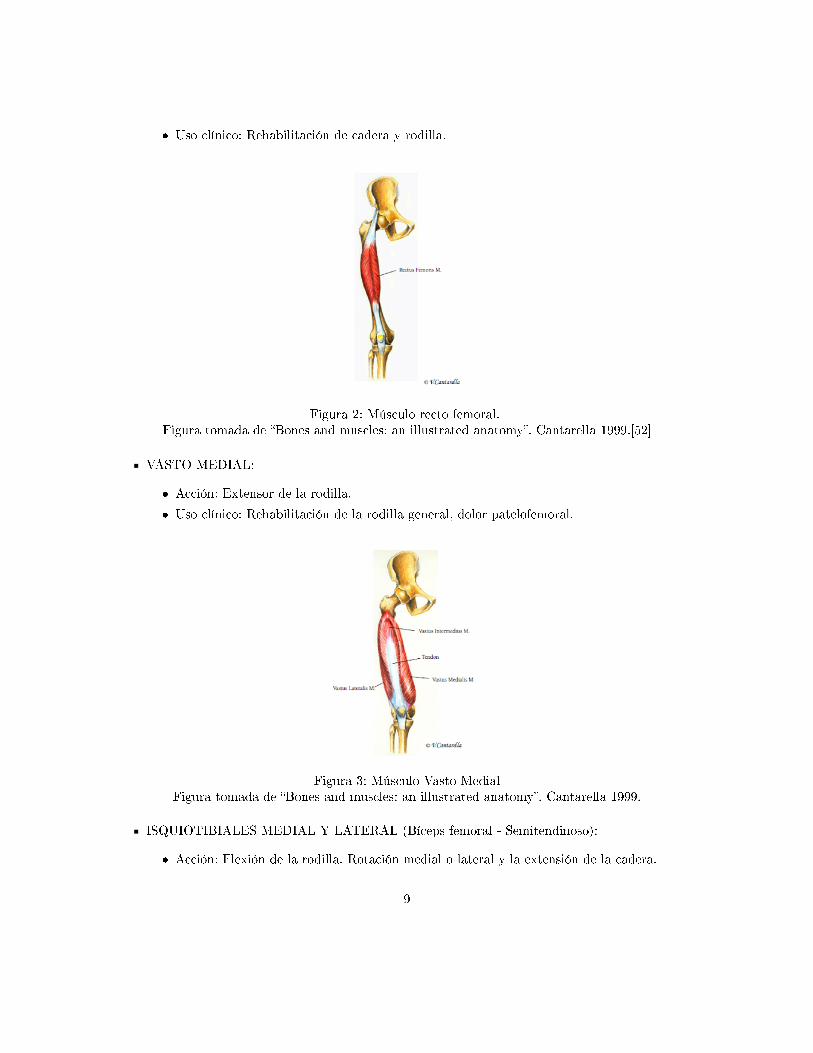
VASTO MEDIAL:
� Acción: Extensor de la rodilla.
� Uso clínico: Rehabilitación de la rodilla general, dolor patelofemoral.
Figura 3: Músculo Vasto MedialFigura tomada de �Bones and muscles: an illustrated anatomy�. Cantarella 1999.
ISQUIOTIBIALES MEDIAL Y LATERAL (Bíceps femoral - Semitendinoso):
� Acción: Flexión de la rodilla. Rotación medial o lateral y la extensión de la cadera.
9
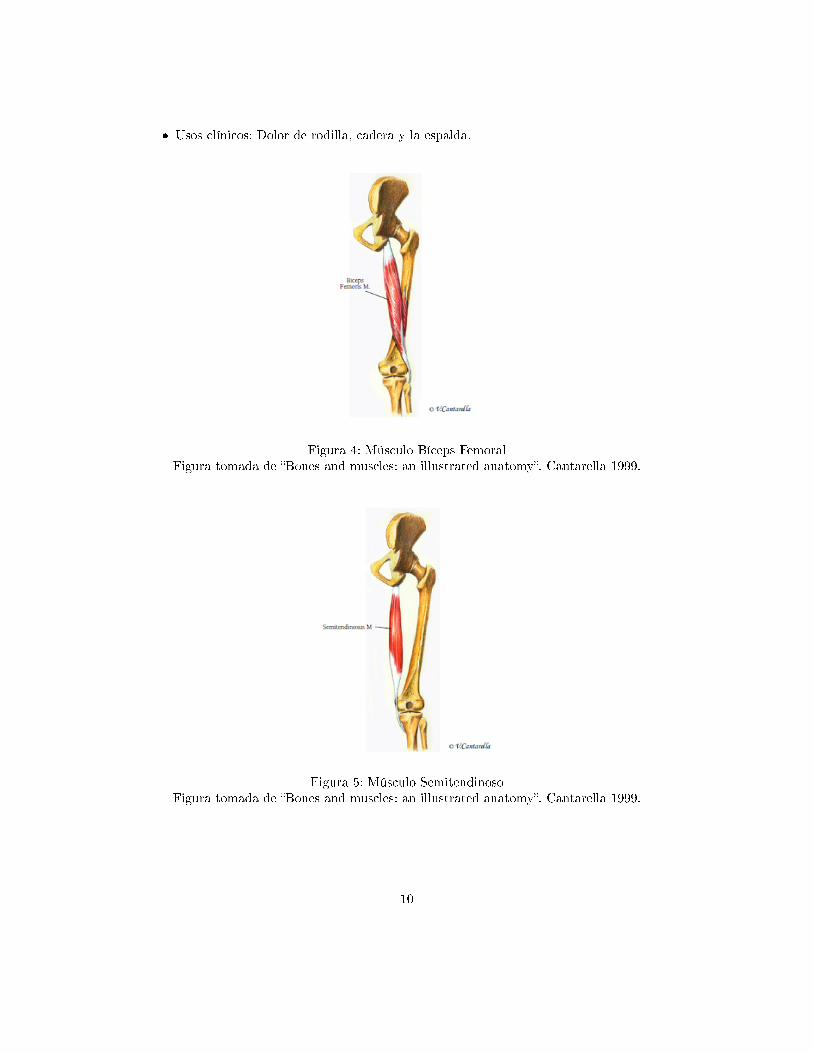
� Usos clínicos: Dolor de rodilla, cadera y la espalda.
Figura 4: Músculo Bíceps FemoralFigura tomada de �Bones and muscles: an illustrated anatomy�. Cantarella 1999.
Figura 5: Músculo SemitendinosoFigura tomada de �Bones and muscles: an illustrated anatomy�. Cantarella 1999.
10
3.2. Patologías de la rodilla
En esta sección se reunen las más relevantes patologías de rodilla y las más comunes entre lossujetos de prueba.
3.2.1. Osteoartritis (OA)
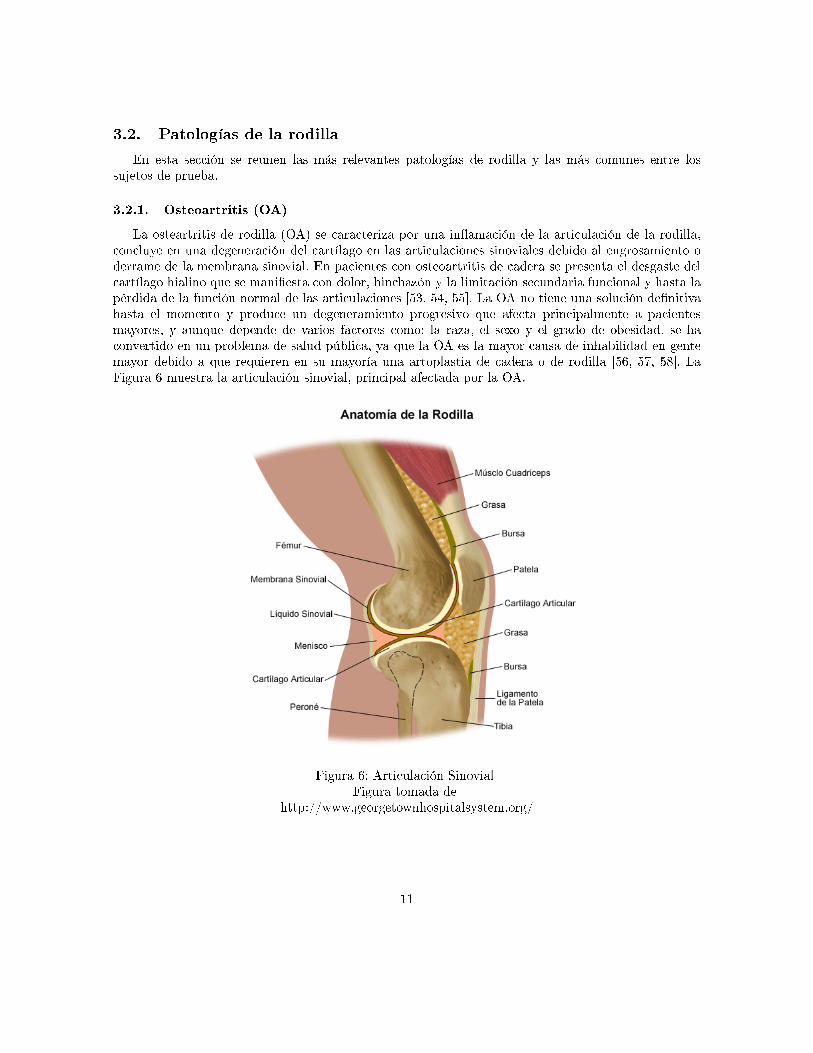
La osteartritis de rodilla (OA) se caracteriza por una in�amación de la articulación de la rodilla,concluye en una degeneración del cartílago en las articulaciones sinoviales debido al engrosamiento oderrame de la membrana sinovial. En pacientes con osteoartritis de cadera se presenta el desgaste delcartílago hialino que se mani�esta con dolor, hinchazón y la limitación secundaria funcional y hasta lapérdida de la función normal de las articulaciones [53, 54, 55]. La OA no tiene una solución de�nitivahasta el momento y produce un degeneramiento progresivo que afecta principalmente a pacientesmayores, y aunque depende de varios factores como: la raza, el sexo y el grado de obesidad, se haconvertido en un problema de salud pública, ya que la OA es la mayor causa de inhabilidad en gentemayor debido a que requieren en su mayoría una artoplastia de cadera o de rodilla [56, 57, 58]. LaFigura 6 muestra la articulación sinovial, principal afectada por la OA.
Figura 6: Articulación SinovialFigura tomada de �
http://www.georgetownhospitalsystem.org/
11
3.2.2. Lesión en el ligamento cruzado anterior
La mitad de las rupturas de ligamentos de la rodilla son en el ACL y el 75% de estas son producidasen la práctica de cualquier deporte [11]. Los ligamentos están expuestos a diversas lesiones provocadaspor una �exión exagerada que se da cuando los pies quedan en una posición, pero las rodillas giran ensentido opuesto, este tipo de movimientos se dan especialmente en actividades deportivas, lo que podríaromper las �bras posteriores de la articulación, haciendo que se pierda la estabilidad en la rotación [59].Una lesión completa de ACL puede llevar a patologías crónicas de las rodilla, incluyendo inestabilidad,lesión secundaria del menisco y el cartílago articular, o el inicio temprano de OA. Aproximadamenteel 66% de todos los pacientes que incurren en una lesión completa de ACL incurren en un daño a losmeniscos y al cartílago articular del fémur, rótula y/o tibia [60].
3.2.3. Problemas en el nervio ciático
El nervio ciático está conectado a las ramas de nervios posteriores en la tibia y al peroné. Estenervio también se conecta con los tendones posteriores a los músculos femoral, semitendinoso, semi-membranoso y al bíceps femoral y a todos los músculos debajo de la rodilla. En otras palabras, ladistribución sensorial del nervio está en toda la cara posterior del muslo, la pierna posterior y lateral,y todo el pie. En lesiones completas del nervio ciático, la rodilla no puede ser �exionada y el pie enterose paraliza. El nervio ciático se puede lesionar por fractura abdominal o pélvica, mala administración(intramuscular) de inyecciones en la región del glúteo o por tumores [61].
3.2.4. Lesión de menisco
El menisco ayuda a distribuir uniformemente las cargas axiales a través la rodilla. Además, elmenisco mejora la congruencia entre la tibia y el fémur. El Menisco medial es menos móvil que elmenisco lateral y da más fuerza durante la carga de peso por lo que es más propenso a la lesión.Se tienen fuertes sospechas que el desgarro meniscal está fuertemente asociada con la obesidad y laedad avanzada, aunque recientes estudios concluyen que aproximadamente el 33% de personas quepresentan una lesión de menisco son pacientes que practican deportes, y otro 39% fueron por traumas(caídas de alturas o de vehículos y algunos por el movimiento de agacharse o levantarse de esta posición[6, 62].
La raíz meniscal se de�ne anatómicamente como la parte del menisco que se conecta a la mesetade la tibial central. Históricamente, el rompimiento de la raíz posterior del menisco medial ha sidotratado mediante una meniscectomía [62]. Esta lesión no diagnosticada a tiempo o mal diagnosticadapuede terminar a largo plazo en una posible OA, lo que afectaría la biomecánica de la rodilla [63, 64].
3.2.5. Fractura de rodilla
Una fractura es la ruptura de tejido óseo causada por el aumento de la distribución interna defuerzas o cargas que un cuerpo sólido puede soportar. En el caso de la rodilla, se tienen generalmentepor traumatismos directos (accidentes de tránsito, lesiones deportivas, etc.) y se caracterizan por 4tipos de fracturas [65]:
Fracturas de los cóndilos femorales: También conocida como fractura distal (más cerca ala articulación). Este tipo de fractura es aproximadamente 10 veces menos frecuente que lasfracturas que afectan a la parte proximal (cerca al centro) de este hueso. Más de la mitad de loscasos reportados de fractura distal del fémur es por accidentes de tránsito [66].
12

Fracturas de los platillos tibiales: También conocidas como fracturas de la extremidad pro-ximal de la tibia. Afectan directamente a la super�cie articular y se asocian con frecuencia alesiones de ligamentos y meniscos [67].
Fractura de tibia y peroné (diá�sis): Es una fractura bastante común en hombres jóvenes.Afecta aproximadamente al doble de hombres que a mujeres y casi nunca ocurre en gente mayorde 40 años. Esta fractura generalmente se da por lesiones directas a través de impacto (carga de�exión) o lesiones indirectas a través de deslizamiento (torsión) [68, 69].
Fractura de rótula: La rótula es el más grande hueso sesamoideo (hueso redondo entre tendo-nes) en el cuerpo y juega un papel crucial en el mecanismo de extensión del tendón del cuádriceps.La fractura rotuliana se puede producir como resultado de fuerzas directas o indirectas. La rótulase fractura generalmente cuando se �exiona la rodilla rápidamente contra el músculo cuádricepstotalmente contraído, lo que resulta en una fractura transversal. La fuerza se extiende más alláde la rótula causando fractura por desplazamiento comprometiendo el aparato extensor de la ro-dilla. Obligando a una muy buena reconstrucción para un buen funcionamiento de la articulación[7, 65].
3.3. Modelado cinemático y dinámico de la rodilla
En esta sección se introduce el modelo cinemático directo del miembro inferior (pierna izquierday derecha), además se presenta el modelo Dinámico de la rodilla para 2 movimientos: cadena cinéticaabierta y marcha.
3.3.1. Modelo cinemático
En la Figura 7 se observan los eslabones y diversos ejes de cada una de las articulaciones de larodilla humana. Tomados desde la parte media de la cadera, donde l1(pie), l2(tibia, peroné), l3(fémur)y l4(cadera).
Figura 7: Diagrama de eslabones de miembro inferior(a) Pierna Derecha (b) Pierna Izquierda. Figura tomada de �Análisis numérico de las fuerzas y efecto
que se involucran en el movimiento de la rodilla�. Mendez 2012.
13

Son varios los trabajos que a partir de las matrices y parámetros de Denavit-Hartenberg1muestran elmodelo de miembro inferior, el cual permite observar la posición de las diferentes articulaciones y huesosque lo conforman [26, 71]. Para ello se requiere conocer los valores de los ángulos y desplazamientos delos ejes, estos son conocidos como los parámetros de Denavit-Hartenberg (DH). El Cuadro 1 muestralos parámetros DH para la rodilla de la pierna derecha según el trabajo realizado por [70].
i θi αi ai di
1 θ1 -90 l1 02 θ2 0 l2 03 θ3 90 l3 04 θ3 90 0 l4
Cuadro 1: Parámetros DH de la pierna derechaCuadro tomado de �Análisis numérico de las fuerzas y efecto que se involucran en el movimiento de la
rodilla�. Mendez 2012.
Obtención de las matrices de transformación homogénea entre los diferentes eslabones. Por simpli-�cación ci = cosθi y si = sinθi
0A1 =
c1 0 −s1 l1c1s1 0 c1 l10 1 0 00 0 0 1
1A2 =
c2 −s2 0 l2c2s2 c2 0 l2s20 0 1 00 0 0 1
2A3 =
c3 0 s3 l3c3s3 0 −c3 l3s30 1 1 00 0 0 1
3A4 =
1 0 0 00 0 −1 00 1 0 l40 0 0 1
Para obtener la matriz �nal se multiplican las cuatro matrices:
0A4 =
c1c2c3 − c1s2s3 c1c2s3 + c1c3s2 − s1 s1 βc2c3s1 − s1s2s3 c2s1s3 + c3s1s2 + c1 −c1 λc2s3 + c3s2 s2s3 − c2c3 0 ρ
0 0 0 1
(1)
1Los parámetros de Denavit-Hartenberg permiten de�nir el modelo geométrico de la posición de la pierna considerandoun sistema de coordenadas asociados para cada eslabón. Con este sistema será posible pasar de un eslabón a otro mediantetransformaciones básicas que consisten en una sucesión de rotaciones y traslaciones [26, 70].
14

dondeβ = l4(c1c2s3 + c1c3s2 − s1) + c1c2c3l3 − c1l3s2s3 + c1c2l2 + c1l1,λ = l4(c2s1s3 + c3s1s2 + c1) + c2c3l3s1 − l3s1s2s3 + c2l2s1 + l1s1,ρ = l4(s2s3 − c2c3) + c2l3s3 + c3l3s2 + l2s2
esta es la matriz �nal de la pierna derecha, que de�ne la posición de cualquier punto del miembroinferior basado sólo en sus eslabones (cinemática directa) y con ella podemos calcular la velocidad yaceleración.
Para la pierna izquierda los parámetros DH se indican en el Cuadro 2:
i θi αi ai di
1 θ1 -90 l1 02 θ2 0 l2 03 θ3 0 l3 04 0 0 0 −l4
Cuadro 2: Parámetros DH de la pierna IzquierdaCuadro tomado de �Análisis numérico de las fuerzas y efecto que se involucran en el movimiento de la
rodilla�. Mendez 2012.
La matriz �nal de la pierna izquierda sería, con la cual también se permitiría calcular la posiciónsólo basada en sus coordenadas �jas:
0A4 =
c1c2c3 − c1s2s3 −c1c2s3 − c1c3s2 −s1 µc2c3s1 − s1s2s3 −c2s1s3 − c3s1s2 c1 σ−c2s3 − c3s2 s2s3 − c2c3 0 υ
0 0 0 1
(2)
dondeµ = c1c2c3l3 − c1l3s2s3 + c1c2l2 + c1l1 − l4s1,σ = c2c3l3s1 − l3s1s2s3 + c2l2s1 + c1l4 + l1s1,υ = −c2l3s3 − c3l3s2 − l2s2
Además del modelo geométrico con los parámetros DH para obtener la posición, la cinemáticapermite obtener y analizar la velocidad y aceleración de la rodilla. La cinemática 3D de la articulaciónse reduce a encontrar la ubicación de contacto de los cóndilos femorales en el cartílago auricular y laposición y orientación del fémur. La velocidad angular alrededor del centro de rotación está de�nidapor [72]:
vrot(θ) = ωρa (3)
donde ω = dθdt , ρa es una función de la posición de contacto y θ es el ángulo de �exión.
La cinemática se puede expresar mediante coordenadas polares (r, θ) por:
.r = ω
dr
dθ(4)
..r =
.ωdr
dθ+ ω2 d
2r
dθ2(5)
15

donde r me permite modi�car cambios en el centro de rotación.
3.3.2. Modelo Dinámico
Para obtener los patrones dinámicos de la rodilla (fuerza, par, momento) se debe de�nir el tipo demovimiento que va realizarse y a analizarse.
Flexión-extensión Para �exión-extensión en cadena cinética abierta se puede de�nir el siguientemodelo dinámico. En la Figura 8 se ilustra las diferentes variables que intervienen en la dinámica dela articulación de la rodilla.
Figura 8: Cadena cinética abiertaFigura tomada de �Modelling and Dynamics of a Knee-Joint�. Kuchta 2007.
El modelo matemático de la dinámica de la rodilla en �exión-extensión sería descrito por [25]:
Mmaxp(α) · kvp(t) · kωp(ω)−Mmaxz(α) · kvz(t) · kwz(ω) = I · ..a+Mr(α) +Mgs · sinα (6)
donde
kvp, kωp, kvz y kwz son funciones no dimensionales circunscritas a la estimulación de los músculosy su fuerza de reacción, así como las relaciones de fuerza-velocidad.
Mmaxp Momento máximo generado por los músculos extensores.
Mmaxz Momento máximo generado por los músculos �exores.
Mr es el antipar (originado por fuerzas externas).
Mgs es el par de frenado originado por la fuerza gravitacional.
I es el momento de inercia de todo el sistema.
16
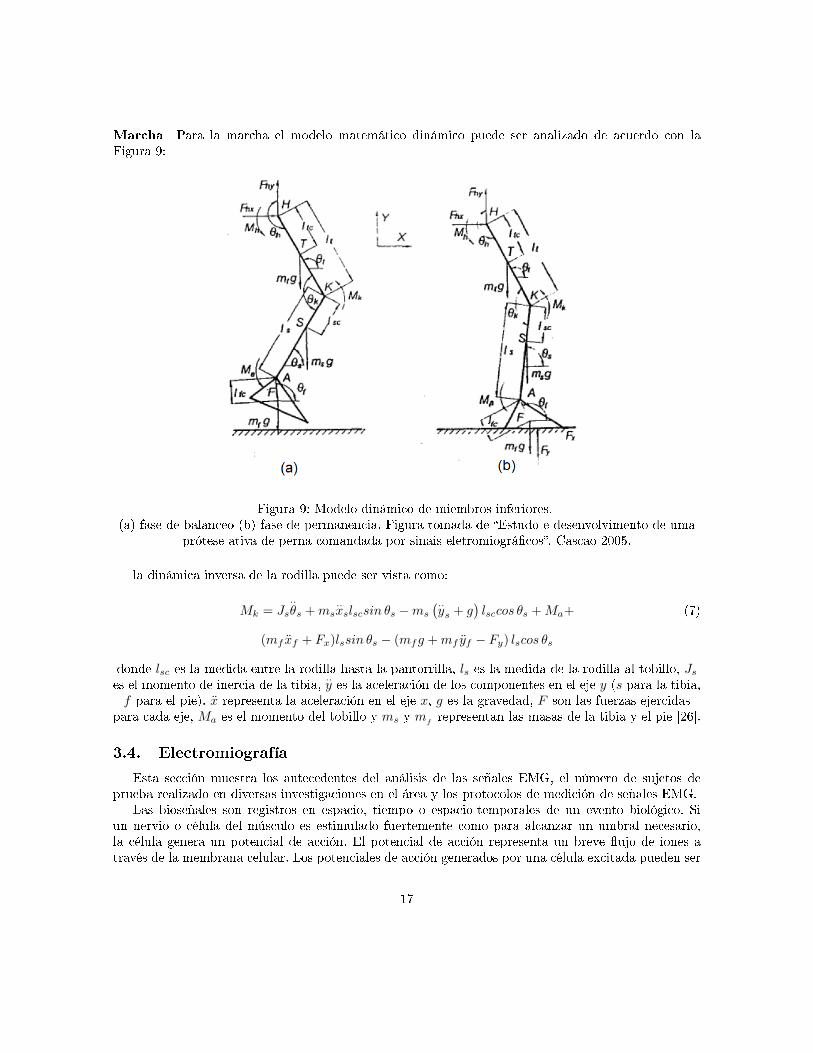
Marcha Para la marcha el modelo matemático dinámico puede ser analizado de acuerdo con laFigura 9:
Figura 9: Modelo dinámico de miembros inferiores.(a) fase de balanceo (b) fase de permanencia. Figura tomada de �Estudo e desenvolvimento de uma
prótese ativa de perna comandada por sinais eletromiográ�cos�. Cascao 2005.
la dinámica inversa de la rodilla puede ser vista como:
Mk = Js..
θs +ms..xslscsin θs −ms
(..ys + g
)lsccos θs +Ma+ (7)
(mf xf + Fx)lssin θs − (mfg +mf yf − Fy) lscos θs
donde lsc es la medida entre la rodilla hasta la pantorrilla, ls es la medida de la rodilla al tobillo, Jses el momento de inercia de la tibia,
..y es la aceleración de los componentes en el eje y (s para la tibia,
f para el pie). x representa la aceleración en el eje x, g es la gravedad, F son las fuerzas ejercidaspara cada eje, Ma es el momento del tobillo y ms y mf
representan las masas de la tibia y el pie [26].
3.4. Electromiografía
Esta sección muestra los antecedentes del análisis de las señales EMG, el número de sujetos deprueba realizado en diversas investigaciones en el área y los protocolos de medición de señales EMG.
Las bioseñales son registros en espacio, tiempo o espacio-temporales de un evento biológico. Siun nervio o célula del músculo es estimulado fuertemente como para alcanzar un umbral necesario,la célula genera un potencial de acción. El potencial de acción representa un breve �ujo de iones através de la membrana celular. Los potenciales de acción generados por una célula excitada pueden ser
17
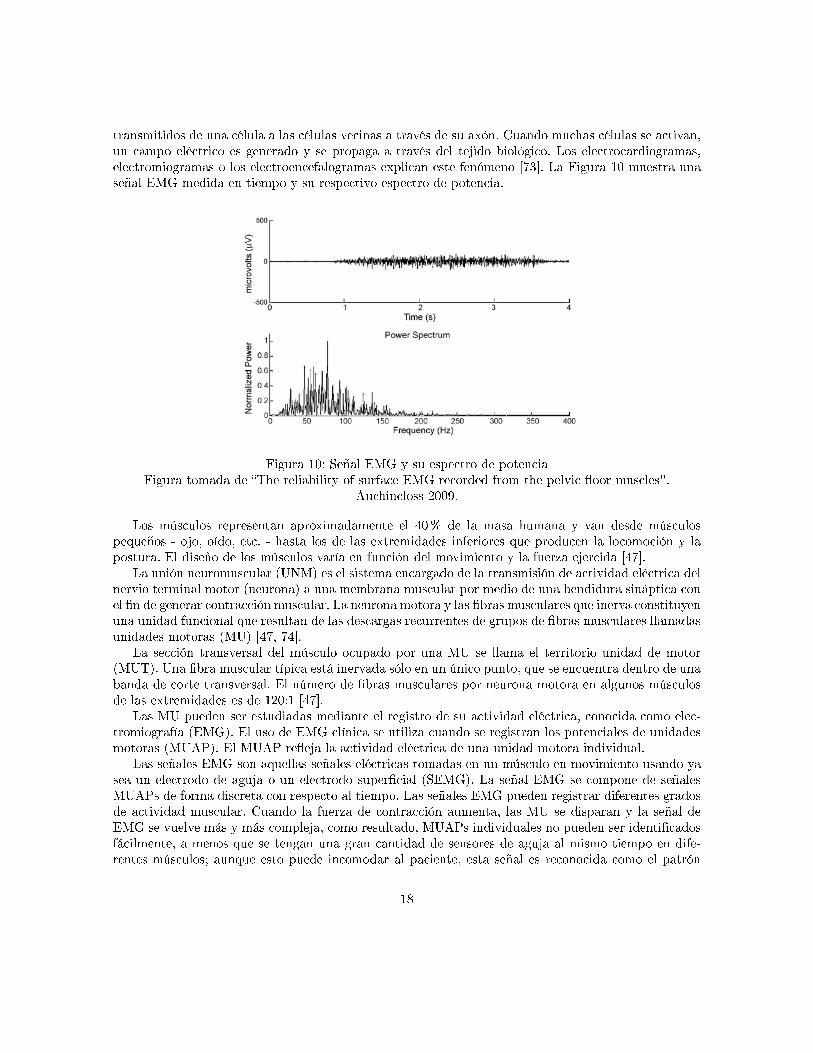
transmitidos de una célula a las células vecinas a través de su axón. Cuando muchas células se activan,un campo eléctrico es generado y se propaga a través del tejido biológico. Los electrocardiogramas,electromiogramas o los electroencefalogramas explican este fenómeno [73]. La Figura 10 muestra unaseñal EMG medida en tiempo y su respectivo espectro de potencia.
Figura 10: Señal EMG y su espectro de potenciaFigura tomada de �The reliability of surface EMG recorded from the pelvic �oor muscles".
Auchincloss 2009.
Los músculos representan aproximadamente el 40% de la masa humana y van desde músculospequeños - ojo, oído, etc. - hasta los de las extremidades inferiores que producen la locomoción y lapostura. El diseño de los músculos varía en función del movimiento y la fuerza ejercida [47].
La unión neuromuscular (UNM) es el sistema encargado de la transmisión de actividad eléctrica delnervio terminal motor (neurona) a una membrana muscular por medio de una hendidura sináptica conel �n de generar contracción muscular. La neurona motora y las �bras musculares que inerva constituyenuna unidad funcional que resultan de las descargas recurrentes de grupos de �bras musculares llamadasunidades motoras (MU) [47, 74].
La sección transversal del músculo ocupado por una MU se llama el territorio unidad de motor(MUT). Una �bra muscular típica está inervada sólo en un único punto, que se encuentra dentro de unabanda de corte transversal. El número de �bras musculares por neurona motora en algunos músculosde las extremidades es de 120:1 [47].
Las MU pueden ser estudiadas mediante el registro de su actividad eléctrica, conocida como elec-tromiografía (EMG). El uso de EMG clínica se utiliza cuando se registran los potenciales de unidadesmotoras (MUAP). El MUAP re�eja la actividad eléctrica de una unidad motora individual.
Las señales EMG son aquellas señales eléctricas tomadas en un músculo en movimiento usando yasea un electrodo de aguja o un electrodo super�cial (SEMG). La señal EMG se compone de señalesMUAPs de forma discreta con respecto al tiempo. Las señales EMG pueden registrar diferentes gradosde actividad muscular. Cuando la fuerza de contracción aumenta, las MU se disparan y la señal deEMG se vuelve más y más compleja, como resultado, MUAPs individuales no pueden ser identi�cadosfácilmente, a menos que se tengan una gran cantidad de sensores de aguja al mismo tiempo en dife-rentes músculos; aunque esto puede incomodar al paciente, esta señal es reconocida como el patrón
18
de interferencia (PI). El análisis de la PI se utiliza en la descripción de la actividad muscular, fatigamuscular, dolor muscular crónico, y en el diagnóstico de pacientes con trastornos neuromusculares[47, 75, 74, 17].
Para el caso de la rodilla, la medición de las contracciones musculares se realiza cuando hay movi-miento de �exión y extensión. El uso de estas señales tiene como objetivo principal estimar la intenciónde movimiento en los miembros afectados por el músculo [27, 37, 35].
La SEMG es una técnica no invasiva para medir la actividad muscular, en la cual se colocanlos electrodos de super�cie en la piel sobre un músculo o grupo de músculos. El uso de electrodos desuper�cie se utiliza ampliamente para registrar como se componen los potenciales musculares. SEMG seutiliza para registrar los músculos en reposo y para estimar la fuerza muscular durante las contraccionesvoluntarias dinámicas [76].
Se pueden encontrar múltiples estudios acerca del análisis de señales EMG en la rehabilitación dela rodilla; como es el caso de la rehabilitación de pacientes con desorden neurológico [27], en donde sebusca la intención de movimiento en cadera y rodilla para controlar el movimiento de un exoesqueleto.También se han usado las señales EMG en el caso de un asistente activo para la rehabilitación derodilla desarrollado por la Universidad de Canterbury que usa las señales EMG para controlar músculosarti�ciales neumáticos (PAM) [35], también se usan las señales EMG para calcular la fatiga del músculoy en la con�abilidad de los datos y patrones obtenidos [32], o está el caso del análisis enfocado en larespuesta EMG de �exión y extensión máxima de la rodilla para normalizar los ángulos y calcular lospicos de par permitidos [39, 18, 40].
La EMG tiene un rol fundamental en la evaluación de patologías, junto con otros procesos clínicos.Y aunque no diferencia especí�camente el tipo de desorden, muestran signos típicos de la existenciade algún tipo de miopatía [75].
3.4.1. Protocolos de medida EMG
Con el �n de minimizar la incomodidad del paciente, los procedimientos de rutina EMG por logeneral sólo emplean un único electrodo que se inserta en diferentes regiones del músculo. Este electrodoregistra la sumatoria de los potenciales de acción de una única �bra (SFAP), o sea, el MUAP. Esdecir, sólo se registra la forma de onda de los potenciales con respecto al tiempo, pero oculta todala información compleja que evita tener una alta resolución de la distribución de potencias espacialesen el rango de tiempo. El problema radica en que no es clínicamente factible obtener muestras dealta resolución en las tres dimensiones de la distribución potencial espacial, ya que esto requeriría lainserción de cientos de electrodos en los músculos. Para interpretar con claridad un registro EMGtomado con un sólo electrodo se debe tener un conocimiento detallado de los principios bioeléctricosinvolucrados, por ejemplo, las fuentes, el conductor, y las propiedades de grabación del electrodo [47].
Electromiografía super�cial SEMG La electromiografía super�cial es una técnica para la eva-luación y el registro de la señal de activación de los músculos mediante el uso de electrodos. Laelectromiografía super�cial es recomendada para análisis biomecánicos, análisis de marcha, en estudiosde fatiga muscular, etc. ya que permite estudiar la actividad muscular en acciones dinámicas. Permiteanalizar simultáneamente distintos músculos en movimiento y en acciones de duración ilimitada. Elprocesado de la señal electromiográ�ca proporciona parámetros de amplitud y frecuencia para estudiosdescriptivos y comparativos. Sin embargo, no permite realizar valoraciones profundas y aporta menosde�nición que la EMG de aguja [12, 77].
19
3.4.2. Sujetos de prueba (antecedentes)
Para el estudio, se requería de sujetos de prueba que tuvieran alguna patología en la rodilla diag-nosticada por un profesional, y que no estuvieran en un proceso de rehabilitación. Se tuvo acceso a 11personas que cumplieron con estas condiciones, en un periodo de 9 meses.
Mediante la revisión del estado del arte se puede determinar si el número de sujetos para el estudio,tienen una validez concluyente para los resultados obtenidos. En el artículo de Yao et al. [78] acercade los efectos de las señales EMG super�ciales y las señales EEG y MEG; se usaron 8 sujetos. Elmismo número de sujetos se usó en la determinación de patrones EMG, cinemática y cinética duranteejercicios de cuclillas [31].
Se usaron 9 sujetos de prueba en las siguientes investigaciones: análisis cuantitativo de la actividadEMG super�cial de los músculos del cráneo y la pierna a través de las etapas del sueño [79], moni-torización continua EMG, MMG, SMG y el par de salida durante las contracciones isométricas enrampa y paso [80] o los efectos del procesamiento EMG en los modelos biomecánicos del sistema dearticulaciones musculares: La sensibilidad de los momentos musculares del tronco, fuerzas espinales, yla estabilidad [81].
Se usaron 10 sujetos de prueba en múltiples investigaciones como: La con�abilidad de los registrosen EMG super�cial de los músculos del suelo pélvico [82], la relación entre la fuerza de agarre y lascaracterísticas de un sólo canal para señales intramusculares EMG [83], la comparación de un métodode esfuerzo físico máximo y un modelo basado en el sub-máximo esfuerzo para normalizar señales EMGdel torso [84] o el efecto de los cambios de velocidad sobre la señal EMG del tibial anterior durante lamarcha para el diseño FES (estimulación eléctrica funcional) en la corrección de la caída del pie [85].
3.5. Métodos de análisis de señales
3.5.1. Caracterización de las señales
Esta sección reúne los principales métodos de análisis de señales para su caracterización y clasi�-cación.
Una herramienta clásica para procesar las señales es la transformada de Fourier, la cual se usa paraextraer y observar las relaciones entre diferentes frecuencias a partir de una señal en el dominio deltiempo. Sin embargo, aunque su uso es exitoso en un gran rango de aplicaciones, la transformada deFourier a menudo presenta limitaciones que dependen de la señal procesada; debido a que el espectrode Fourier o de Energía no entrega información temporal sobre la localización de las frecuencias [86,87, 88, 89, 90]. Esto puede ser un problema ya que 2 señales pueden tener un mismo espectro en eldominio de la frecuencia pero ser diferentes en el dominio del tiempo.
Una propiedad importante de las señales es la estacionaridad, lo que implica que sus propiedades(momentos estadísticos) no varían a lo largo del tiempo, con lo que su análisis resulta más sencillo.En cambio, para señales no estacionarias, que son las que generalmente ocurren en la naturaleza, laspropiedades de la señal varían a lo largo del tiempo [91].
El análisis tiempo-frecuencia se aplica a señales altamente no estacionarias como es el caso de lasbioseñales, donde es importante estimar componentes frecuenciales en instantes de tiempo determina-dos. Estas señales se pueden representar adecuadamente mediante una distribución tiempo-frecuencia(TFD), la cual muestra la distribución de la energía de la señal en el espacio bidimensional tiempo-frecuencia. Así, en el procesamiento de la señal, se pueden aprovechar las características producidaspor la concentración de la energía en dos dimensiones (tiempo y frecuencia) en vez de sólo una (tiempoo frecuencia) [92, 90].
20
Una bioseñal puede procesarse de diferentes formas con el �n de extraer información especí�ca,la cual no puede ser visualizada adecuadamente en el dominio del tiempo. Las bioseñales pueden ser:analizadas, sintetizadas, �ltradas, caracterizadas, moduladas, estimadas, clasi�cadas, etc.
Una forma de seleccionar cuál es la distribución tiempo-frecuencia más adecuada para procesarseñales electromiográ�cas, será examinar si cumple con ciertas propiedades necesarias para dicha apli-cación. Existen varias categorías de propiedades ideales de las TFD: covarianza, distribución estadística,análisis de señales, localización, y productos internos [93, 94, 95].
De acuerdo a las propiedades que cumplan las señales EMG, es posible realizar una subdivisiónde las TFD de acuerdo a las propiedades que cumplen. De esta forma, las dos principales clases dedistribuciones tiempo frecuencia son [96]: La clase de Cohen de TFDs covariantes [97] y la clase afínde TFDs [94].
Si las TFD satisfacen las propiedades de covarianza al desplazamiento en tiempo, y en frecuenciase pueden determinar que pertenecen a la clase de Cohen [86, 95, 90]. Esta clase puede analizarsecon diversas técnicas como son:
1. Transformada de Fourier en tiempo corto (STFT) y espectrograma.
2. Distribución Wigner�Ville (WVD).
3. Distribución Choi-Williams (CWD).
4. Distribuciones de kernel dependientes solamente de tiempo (T- distribuciones).
5. Distribución Pseudo Wigner-Ville Suavizada (SPWVD).
Ahora, si las representaciones tiempo-frecuencia son covariantes a cambios en la escala y a tras-laciones en el tiempo se pueden determinar que pertenecen a la clase afín [95, 90]. Esta clasecomúnmente se analiza con la Transformada Wavelet continua (CWT).
El estudio del espectro de las bioseñales ha sido extensamente estudiado usando análisis de Fourier. Yuno de esos procedimientos tradicionales está basado en el uso de la STFT [98]. El principal problemade la STFT es que aunque se usa en señales no estacionarias, necesita de un alto nivel de periodicidad,debido a que requiere de un tamaño de ventana constante y consecutiva en el tiempo para su procesa-miento [99]. Investigaciones han demostrado que la STFT funciona bien para fonemas sonoros vocalesen el reconocimiento de voz debido a que las vocales son de mayor duración que las consonantes y estánbien de�nidas espectralmente [90]. El sonido se produce cuando el aire en los pulmones llega hastala laringe, donde se encuentran las cuerdas vocales (las cuales son músculos gemelos) que al vibrarcuando el aire pasa por ellas produce el sonido conocido como voz [100, 101]. Análogamente la EMGmuestra las señales cuando se realiza una contracción muscular [47], además, los test musculares enlas pruebas físicas requieren de ciclos de movimientos periódicos.
El Análisis Wavelet es un caso particular del procesamiento de señales. Es una técnica adecuadapara análisis de señales estacionarias, como no-estacionarias, debido a que proporciona un análisis deresolución múltiple (en el tiempo y frecuencia), a diferentes escalas y resoluciones, siendo especialmenteútil para la diagnosis de defectos [102]. Son múltiples los usos de la transformada de Wavelet (WT)en el procesamiento de señales EMG, aunque principalmente se usa para localizar y caracterizar loscontenidos de frecuencia de cada MUAP [103, 104, 105, 106], sin embargo, se han usado los componentesWavelet para extraer los movimientos de la rodilla de una señal EMG ante un ejercicio de �exión-extensión [59] o se usaron los resultados de la WT para determinar algunos componentes de biocontrolpara prótesis [19].
21

3.5.2. Transformada de Fourier en tiempo corto (STFT)
La STFT aplica una función g(t) utilizada como ventana de análisis que se mueve sobre x(t)para determinar el espectro en cada instante de tiempo. Y está de�nida por la siguiente expresión[102, 90, 101, 107]:
SSTFT (t, f) =
∞
−∞
x(t)g(τ − t)e−j2πfτdτ
=
∞
−∞
x(τ)g∗t,f (τ)dτ (8)
donde τ indica la posición en el tiempo en la que se hace el análisis y g∗denota el complejo conjugadode g. Son muchas las ventanas disponibles para hacer el análisis tiempo-frecuencia como son: Hanning,Hamming, Coseno, Kaiser y Gaussiana. La STFT más común es la que usa la ventana Gaussiana, quees conocida como la transformada Gabor.
El espectrograma es el cuadrado de la magnitud de la STFT:
Especx(t, f) =
∣∣∣∣∣∣∞
−∞
x(t)g(τ − t)e−j2πfτdτ
∣∣∣∣∣∣2
(9)
el cual se usa para obtener una distribución de la energía de la señal x en el plano tiempo-frecuencia[90, 107].
3.5.3. Transformada Wavelet
El uso de Wavelets se ha aplicado con éxito en el análisis de señales no estacionarias en diversosy complejos campos cientí�cos como: la identi�cación de tonos, la eliminación de señales, la com-presión, vibración de estructuras o el procesamiento de imagen y video. Esta técnica es particular-mente útil cuando se requiere la resolución más alta posible en los dominios de tiempo y frecuencia[102, 100, 108, 109]. Fourier representa una función -que representa a su vez a una señal- como unasuma �nita de términos simples (componentes de frecuencia) que contengan funciones ortogonales; esdecir, superposición de señales sinusoides, llamadas funciones base, multiplicándolos apropiadamentepor algunos coe�cientes elegidos. Estos coe�cientes dependen de la propia señal y la función base. En elcaso de Wavelets, es posible pensar en la sustitución de senos y cosenos por funciones especiales llama-das Wavelet madre, que es una forma de onda, donde sus versiones trasladadas y escaladas (dilatadas)vienen a formar las funciones base [100, 108, 101].
En el artículo de Pope de 2009 [108] acerca de el uso de Wavelets para la evaluación de señalessuper�ciales EMG en los músculos bajos de la espalda se plantea que: �Podemos pensar en WT como
un microscopio matemático que con una Wavelet madre comprimida detecta singularidades o cambios
bruscos de la señal y con una expansión de la Wavelet madre detecta �nos detalles de frecuencia� . Locual implica que se puede observar en detalle el comportamiento en tiempo y en frecuencia de unaseñal, pero que para ello debemos comprender el funcionamiento de una función Wavelet madre.
A partir de la función madre ψ(t) se generan las funciones Wavelet ψa,b(t) mediante operacionesconjuntas de cambio de escala y translación como se relaciona en la siguiente expresión [109].
22

ψa,b(t) =1√|a|ψ
(t− ba
)(10)
donde a representa el cambio de escala y b el cambio en translación.Si la función madre ψ(t) es real, entonces la familia de funciones de�nidas por la traslación y
escalamiento conforman una base completa del espacio y, por lo tanto, se puede representar cualquierfunción mediante una combinación lineal de las funciones ψa,b(t), calculando los coe�cientes de ladescomposición en la forma del producto escalar [109].
La Wavelet madre ψ(t) debe satisfacer las siguientes condiciones [100]:
1. Ser una señal de energía,´ψ(t)2dt <∞.
2. Tener oscilaciones pequeñas.
Existen diversos tipos de Wavelet madre que cumplen las condiciones anteriormente mencionadas,de las cuales las más sobresalientes son las Wavelets tipo Haar, Mexican Hat, Morlet, Daubechies
[110, 100], las cuales se pueden observar en la Figura 11.
Figura 11: Familias de Wavelet Madre
Existen 2 tipos de Wavelet: continua (CWT) y discreta (DWT). La CWT de una señal x(t) sede�ne como la integral del producto entre la señal x(t) y las Wavelet hija, que son las versiones deexpansión /compresión a escala y translación de una Wavelet madre, este cálculo genera coe�cientes
23

Wavelet continuos CWC(a, b) y aunque brinda importante información en tiempo frecuencia, presentala di�cultad del procesamiento computacional y el tiempo que necesita para realizarlo [111, 101].
La transformada CWT esta descrita por [100, 109, 101]:
CWT (a, b) =´∞−∞ x(t)ψ∗a,b(t)dt
CWT (a, b) =
∣∣∣∣∣ 1√|a|
ˆ ∞−∞
x(t)ψ∗(t− ba
)dt = 〈x(t), ψa,b(t)〉
∣∣∣∣∣ (11)
La DWT analiza la señal en diferentes bandas de frecuencia con diferentes resoluciones, al des-componer la señal en aproximaciones y detalles, empleando para ello dos conjuntos de funciones: lasfunciones de escalamiento y las funcionesWavelet respectivamente, esta permite una aplicación directaa procesos computacionales [106]. Para obtener las componentes deseadas, la señal original es �ltra-da mediante �ltros pasabajos y pasaaltos. Este proceso es repetido hasta obtener la descomposiciónfrecuencial deseada.
La DWT emplea valores para a y b, la escala de la Wavelet madre, se relaciona como potenciasenteras de una escala de referencia a0, normalmente mayor que 1, así a = aj0. Para discretizar elparámetro b, se debe tener en cuenta que el recubrimiento discreto del plano tiempo-frecuencia eslocalizado en cada escala, por lo tanto b depende de a. El punto crítico es cómo el parámetro a y bpueden garantizar la reconstrucción precisa de la señal original x(t) a partir de la transformadaWavelet
[100, 109, 112].Como el ancho de las funciones a cada escala es directamente proporcional con la misma, se toma
una discretización del parámetro b directamente relacionada con la escala que se está trabajando.Generalmente la DWT emplea valores para a y b, en una escala de potencias de dos denominadadiádica. Debido a que el análisis será mucho más e�ciente e igual de preciso que el análisis continuo.Por lo tanto a0 = 2 y b = kb0a
j0; es decir, b = kb02j [109, 112, 113].
La transformada diádica de Fourier es vista como
ψj,k(t) = a−j/20 ψ
(a−j0 t− kb0
)(12)
donde j representa la escala y k la traslación temporal [109, 113].
Una posibilidad de implementación de este esquema usando �ltros fue desarrollada por Mallat[114, 100, 101]. En este caso, la señal x(t) se representa como una serie de aproximaciones (baja fre-cuencia) y detalles (alta frecuencia) en diferentes resoluciones. La representaciónWavelet es entonces, elconjunto de coe�cientes de detalle en todas las resoluciones y los coe�cientes de aproximación en la reso-lución más baja. Esta técnica es conocida como análisis multiresolución o MRA [110, 100, 109, 101, 112].
El algoritmo rápido para calcular los coe�cientes Wavelet, está dado por [109, 112]
caj,k =∑m
h[2k −m]caj−1[m] (13)
cdj,k =∑m
g[2k −m]caj−1[m] (14)
donde h y g representan los �ltros aplicados a la señal de entrada. Los �ltros deben cumplir con laspropiedades descritas en la siguiente expresión [109, 113].
24

g [n] = (−1)1−n
h [1− n] (15)
La descomposición multinivel, es un proceso iterativo donde sucesivas aproximaciones son descom-puestas y con ello la señal original queda dividida en componentes de baja resolución. Esto se llamaárbol Wavelet [110, 109, 112].
La descomposición Wavelet está dada por la expresión [109, 113]
caj−1,k = 2∑m
(caj,k [m]h [k − 2m] + cdm,k [m] g [k − 2m]) (16)
3.5.4. Análisis de componentes principales
Para este trabajo se requiere del análisis de componentes principales (PCA) para la clasi�cación.PCA es una herramienta estadística que permite reducir la dimensión de datos multivariados a un con-junto que contenga la información más relevante del proceso [115, 116, 117]. Esa información relevante(conjunto de componentes principales), se obtiene encontrando la correlación entre n variables. Lasnuevas variables son combinaciones lineales de los conjuntos originales de muestras y se van construyen-do según el valor de la varianza total de la muestra. Se buscan m < n variables que sean combinacioneslineales de las n originales. Si el conjunto original está incorrelado no es necesario realizar un PCA.
Se considera una serie de variables x1,x2, ..., xn y se trata de calcular, un nuevo conjunto devariables y1, y2,...,yn, incorreladas entre sí, cuyas varianzas vayan disminuyendo cada vez.
Cada yj (donde j = 1, . . . , n) es una combinación lineal de las x1,x2, ..., xn originales, es decir[118, 115, 116]:
yj = aj1x1 + aj2x2 + ...+ ajnxn = a′
jX
siendo a′
j = (a1j , a2j , ..., anj) un vector de constantes, y
X =
x1...xn
Si se quiere aumentar la varianza conservando la ortogonalidad se requiere que el vector a
′
j =(a1j , a2j , ..., anj) sea igual a 1 [119]. Por lo tanto,
a′
jaj =
n∑k=1
a2kj = 1
El algoritmo que describe el proceso de PCA puede verse en [120], donde se presentan las tareaspara realizar la transformación y obtener la matriz de autovectores:
1. Cálculo de la media: Se calcula la media de cada uno de los componentes del conjunto inicial.Generando una Matriz de medias.
25

2. Cálculo de la covarianza: Se obtiene la matriz de covarianza C usando la siguiente expresión:
C =1
n·n∑i=1
xi · xTi (17)
3. Cálculo de los Autovectores: Se obtienen mediante la expresión:
C ·A = λI ·A (18)
donde λ =
λ1...λm
es el vector de autovalores y A =
a1,1 a1,2 ... a1,na2,1 a2,2 ... a2,n... ... ... ...am,1 am,2 ... am,n
es la matriz de
autovectores.
4. Reducción de la matriz de autovectores: Se calcula la raíz cuadrada del error cuadrático medio(RMSE), para ordenar los autovalores de mayor a menor. De todos los autovectores se debenescoger los t autovalores con mayor peso. Se usa la expresión descrita a continuación
RMSE =
t∑i=1
λi
m∑i=1
λi
< p (19)
donde p es un valor normalizado entre 0 y 1, y es el porcentaje de los componentes con mayorvarianza acumulada.
Como resultado se tiene una matriz de transformación reducida
At = [a1, a2, ..., at] (20)
donde aj =
a1,ja2,j...an2,j
representa cada uno de los autovectores de la matriz de covarianza [115,
120, 119].
3.6. Clasi�cadores
Son muchos los clasi�cadores que se pueden usar para el reconocimiento de las características conpotencial de predicción de porcentaje de normalidad y anormalidad. Como son las redes neuronalesarti�ciales (ANN), análisis discriminante lineal, análisis de componentes principales, el uso de máquinasde vectores de soporte o la técnica de los K -vecinos más cercanos.
26

3.6.1. Redes neuronales Arti�ciales
El objetivo de la descomposición de la señal EMG es a menudo la extracción de la información clínicapertinente de un análisis cuantitativo (QEMG) de las MUAPs individuales y los patrones de disparo delas unidades motoras [20]. De allí que en los últimos años el uso de las ANN se haya convertido en unaforma bastante popular en el reconocimiento de patrones en las señales EMG. Muchas característicaspueden encontrarse con su uso como los coe�cientes AR, los coe�cientes de re�exión, los coe�cientescepstrales y la densidad espectral de potencia [121].
Las ANN son modelos simpli�cados de las redes neuronales biológicas y funcionan como un proce-sador en paralelo distribuido y conectado que almacena algún conocimiento experimental. Las ANNusan una función no lineal de una combinación lineal de las entradas, en donde los coe�cientes de lacombinación lineal son parámetros adaptativos (pesos). Cada neurona se puede describir como unaserie de transformaciones funcionales donde se incluye un conjunto de enlaces sinápticos, un enlace depolarización y un enlace de activación [122, 90, 123].
Se pueden encontrar 3 tipos de arquitectura generales en las ANN [123]:
1. Redes neuronales unicapa: la capa de neuronas de entrada se conecta directamente a la capa deneuronas de salida a través de la sinapsis.
2. Redes neuronales multicapa: existen varias capas entre la salida y la entrada a las cuales se lesllama capas ocultas o neuronas ocultas. Pueden estar total o parcialmente conectadas.
3. Redes neuronales recurrentes: existe algún lazo de realimentación.
El conjunto de enlaces sinápticos está dado por M combinaciones lineales de las variables de entradax1, . . . , xD de la forma [90],
aj =
D∑i=1
w(1)ji + w
(1)j0 (21)
donde j = 1, . . . ,M, y el superíndice (1) indica los correspondientes parámetros que correspondena la primera capa de la red. Los parámetros w(1)
ji son pesos y los parámetros w(1)j0 son constantes de
polarización. La cantidad aj se conoce como activación, y cada activación es transformada usando unafunción de activación no lineal y diferenciable,
zj = h (aj) (22)
Las salidas zj corresponden a la respuesta de las llamadas unidades ocultas. Las funciones nolineales h(·) se eligen generalmente como funciones sigmoidales. Los valores se combinan de formalineal nuevamente para obtener las activaciones de las unidades de salida [90],
ak =
M∑j=1
w(2)kj zj + w
(2)k0 (23)
donde k=1,...,K y K es el número de salidas. Esto es para la segunda capa de red.
27

El perceptrón Es la forma más simple de una ANN. Utilizada para la clasi�cación de patroneslinealmente separables, que consiste en una sola neurona con pesos ajustables y un umbral. Cuandoestos patrones no cumplen esta característica, la solución es usar un perceptrón multicapa (MLP) queposee una estructura al menos con una capa oculta; y el algoritmo de entrenamiento más usado es elalgoritmo de retropropagación (del tipo corrección de error) y ha sido aplicado con éxito para resolverdiversos problemas [122, 123].
Algoritmo de retropropagación El algoritmo consta de 2 etapas[123]:
1. Etapa hacia adelante
Se �jan los parámetros de la red y se genera una señal de entrada que se propaga hacia adelantepara producir una salida.
2. Etapa hacia atrás
El error entre la salida deseada y la red se propagan hacia atrás. Los parámetros se modi�canpara minimizar el cuadrado del error.
La Figura 12 representa un perceptron multicapa con una sola capa oculta.
Figura 12: Red neuronal tipo MLP
El j-ésimo componente del error de aproximación se expresa [123, 106]:
ej(k) = dj(k)− yj(k) (24)
donde e(k) es la suma instantánea del error al cuadrado dj(k) es la respuesta deseada de una neuronaen la capa de salida, y yj(k) es la salida de la neurona, en la capa de salida. La suma de los erroresinstantáneos al cuadrado es:
ε(n) =1
2
l∑jεC
e2j (k) (25)
28

C representa el conjunto de neuronas de salida, C={1,2,...,n}
El error promedio donde N corresponde a los N pares de entrenamiento sería [122, 123],
εav =1
N
N∑k=1
ε(k) (26)
La meta �nal será minimizar εav con respecto a los pesos. Este proceso es conocido como entre-namiento [123]. Uno de los principales algoritmos de retropropagación es el de Levenberg-Marquardt(LM) que ha demostrado que es el método más rápido para la formación de ANN de tamaño moderado(hasta varios cientos pesos). También tiene una implementación e�ciente en la plataforma MATLAB®,ya que la matriz solución está incorporada en su ambiente [124]. LM es un algoritmo que permite en-contrar el mínimo local de una función expresado como la suma de mínimos cuadrados de funcionesno lineales, como se muestra en la expresión:
jj = jX ∗ jX
je = jX ∗ E
dX = −(jj + I ∗mu)/je (27)
donde jX es el Jacobiano del rendimiento de la variable de desviación X, E es el error total, I es lamatriz identidad, mu es un valor adaptativo que cambia de forma interactiva, es decir que se repitehasta que encuentra una valor óptimo [124].
Entrenamiento de un perceptrón multicapa Existen varios tipos de entrenamiento aplicadosa las MLP:
Modo secuencial: En este modo los pesos se actualizan después de la presentación de cada ejemplode entrenamiento.
Modo por épocas: Los pesos son actualizados después de la presentación de todos los entrena-mientos (época).
Sin importar el modo de entrenamiento utilizado el promedio aritmético para cambio de pesos es [123]
4ωji(k) = − η
N
N∑k=1
ej(k)∂ej(k)
∂ωji(k)(28)
3.6.2. Análisis discriminante Lineal (LDA)
El análisis LDA busca reducir la dimensión del espacio de características preservando la mayorparte de la información, tratando de tener una mayor separabilidad entre estas nuevas clases [125].La solución que propuso Fisher [126], fue la de encontrar una función proporcional que potencialice ladiferencia entre los valores medios y normalizados por medio de un dispersión dentro de las clases. Porejemplo, para el caso de dos clases se tiene la función y = ATx que potencializa la función:
29

J(A) =|µ1 − µ2|2
σ21 + σ2
2
(29)
donde µi y σ2i son la media y la varianza de los datos de cada clase proyectados [127].
3.6.3. Máquina de vectores de soporte (SVM)
SVM es un método de clasi�cación supervisada, emplea un algoritmo de optimización para aprendery generar una super�cie de decisión para múltiples grupos. Esta super�cie de decisión o frontera segenera con muy poco conocimiento de los datos fuera de esta frontera. Los datos pueden ser mapeadospor un kernel Gaussiano u otro tipo de kernel a un espacio de características en un espacio dimensionalmás alto, donde se busca la máxima separación entre clases. Esta función de frontera, cuando es traídade regreso al espacio de entrada, puede separar los datos en todas las clases distintas, cada una formandoun agrupamiento [128, 129]. En la Figura 13 se puede observar el hiperplano que se requiere obtenerpara separar 2 grupos.
Figura 13: SVM linealTomada de �reconocimiento de localizaciones mediante máquinas de soporte vectorial �. Riobo 2012.
La función espacio de un modelo SVM tiene la forma [130, 131]
y(x) = ωTφ(x) + b (30)
donde φ(x) mapea el vector de entrada en una función de dimensiones superiores, b es el bías y ω esun vector con la misma dimensión que el espacio donde están las características por clasi�car.
Para cuando son linealmente separables se tiene que [130, 131]:
ωTxi + b ≥ +1, si yi = 1
ωTxi + b ≤ −1, si yi = −1
Para cuando no son separables se tiene que:
30

ωTφ(xi) + b ≥ +1, si yi = 1
ωTφ(xi) + b ≤ −1, si yi = −1
Como se requieren una gran cantidad de hiperplanos para poder separar en algunos casos losgrupos en el espacio de características, es necesario diversos tipos de kernel para encontrar y resolverlas clasi�caciones, entre los principales se encuentran los lineales, polinomiales, splines, RBF, etc [131].
3.6.4. K vecinos cercanos (KNN)
Este es uno de los métodos más importantes en análisis no paramétrico, además de ser un algo-ritmo no supervisado. Es un algoritmo que se basa completamente en el aprendizaje en su etapa deentrenamiento. Cada vez que entra un dato se asocia a uno de los vecinos más cercano [132].
El proceso de clasi�cación de una muestra X esta dado por:
Se tiene un vector d de entrenamiento de dimensión m. Y unos grupos de�nidos con tamaño Y .
La muestra X se hace de la misma forma (X1, X2, ..., Xm), que el vector de entrenamiento.
Se calculan las similaridades entre las muestras X y todas las muestras del vector d. Tomandocada i-ésima muestra del vector de entrenamiento comparada con el vector X [133].
Similaridad(X, di) =
∑mj=1Xj .dij√(∑m
j=1Xj
)2·√(∑m
j=1 dij
)2 (31)
Se escogen las k muestras más largas para los Y grupos de�nidos. Por lo tanto se tendrá unvector KNN de X. Después se calcula la probabilidad de que X pertenezca a cada grupo, através de la siguiente forma [133] :
P (X,Cj) =∑Similaridad(X, di) · y(di, Cj)
d
donde y(di, Cj) es la función del grupo que cumpla que y(di, Cj) = 1 si di ∈ Cj , o es 0 sidi /∈ Cj
Por último, cada muestra X se asocia al grupo que tenga mayor probabilidad.
3.7. Algoritmos de agrupamiento
El análisis de los datos se usa en diversas aplicaciones computacionales, y aunque sea para la for-mulación de hipótesis o la toma de decisiones, se debe tener un agrupamiento o clasi�cación de lasmediciones, ya sea basada en el mejor ajuste a un modelo postulado, o en agrupamientos naturales(clustering). El clustering es la organización de un conjunto de patrones en grupos basándose en lasimilitud. Su gran ventaja es que no requiere de un conocimiento anterior de las clases para la clasi-�cación. Generalmente, se requiere algún parámetro inicial. Y como a�rma [134] �la tarea del análisisno supervisado es agrupar patrones homogéneos sin ninguna información acerca de la naturaleza delas clases presentes en el conjunto de datos�. De allí la importancia de analizar los diferentes algorit-mos representativos del agrupamiento no supervisado de tipo particional, en este caso el basado encentroides (k-medias y el h-media) [135, 136, 137].
31

3.7.1. Agrupamiento basado en centroides
En el agrupamiento basado en centroides o particional se realiza una división inicial de los datosen grupos y luego se mueven los objetos de un grupo a otro para minimizar una función objetivo, lacual de�ne el agrupamiento [138, 134].
El agrupamiento basado en la mínima suma de cuadrados (MSSC), es uno de los más usados, sufunción objetivo se puede expresar como:
e2 (h, l) =
K∑j=1
cj∑i=1
∥∥∥X(j)i − qj
∥∥∥2 (32)
donde l es el cluster del grupo de patrones h y x(j)i es el i -ésimo patrón perteneciente al cluster j -ésimoy qj es el centroide del cluster. Y esta dado por:
qj =1
ne(cj)
∑l:xlεcj
xl, j = 1, ..., k (33)
donde ne(·) denota la cantidad de elementos de su grupo argumento y k es el número de grupos[135, 136, 137].
Este método busca encontrar la segmentación de los datos que minimice la distancia entre loselementos de cada grupo y su respectivo centroide, para determinar si los elementos pertenecen a unmismo grupo o son aislados. Este mismo principio lo aplican los algoritmos básicos de k-medias yh-medias [138, 134].
3.7.2. k-medias
También conocido como k-means, es el algoritmo más simple y más ampliamente usado que em-plea el criterio del error cuadrado. En este método se usa una segmentación inicial con k centroidesiniciales, y k grupos, cada centroide se mueve y se recalculan las distancias entre los elementos paraser agrupados, luego en estos grupos se determina un nuevo centroide. Esto se realiza hasta que nohaya cambios en los grupos [135, 136, 138, 134].
Si un elemento xi perteneciente a un grupo Cl en la solución actual es reasignado a algún otrogrupo Cj . La actualización de los centroides puede realizarse aplicando:
ql ←nlql − xinl − 1
, qj ←njqj + xinj + 1
(34)
donde ni = ne (Ci) y l 6= j
3.7.3. h-medias
El algoritmo h-medias mejora el costo computacional, ya que las iteraciones consisten en la asig-nación alternada de la función objetivo y las fases de reubicación del centroide, es decir, se generantodos los k centroides antes de evaluar el cambio de la función objetivo [135, 134].
32
4. MARCO EXPERIMENTAL
4.1. Protocolo de medición
Para tener validez en la toma de muestras y valores, deben de�nirse algunos parámetros a través deun protocolo de medición estándar en una prueba física para esta investigación aplicada. Los parámetrosque deben de�nirse son: Sujetos de prueba a quienes se les tomarán las muestras, cuáles movimientos derodilla, en qué condiciones se realizará el registro de las señales EMG y la medición de ángulos. Tambiénse requiere de�nir qué otras medidas son necesarias para dar mayor rigor al cálculo de velocidades yaceleraciones para tener un modelo del movimiento de la rodilla en �exión-extensión en el plano sagital.
4.1.1. Criterios y variables de exclusión e inclusión
Como la formulación del problema de investigación está fundamentado en la detección de norma-lidad o anormalidad en rodilla en sujeto especí�co usando señales EMG, se debe tener un grupo decontrol (sujetos sin patología en la rodilla) y un grupo de sujetos con alguna patología en la rodillavalorada por un profesional en rehabilitación. Por demanda, como se explicó en la sección 3.4.2, serealizó el estudio con 11 sujetos, para el análisis y relación entre las señales EMG y un modelo delmovimiento de la rodilla en �exión-extensión en el plano sagital.
Se seleccionaron sujetos de sexo masculino y con una edad mayor a 18 años, para dar el consen-timiento en el uso de las muestras tomadas (Ver Anexo 1). Como una de las pruebas físicas esen marcha no se incluyeron sujetos de prueba con amputación de alguno de sus miembros inferiores,debido a que afectan ostensiblemente las medidas antropomór�cas, además de los valores cinemáticosregistrados.
Para tener un experimento equilibrado se debe tener un grupo de control con comportamientonormal que tenga el mismo tamaño que el número de muestras anormales registradas [139].
4.1.2. Valores antropomór�cos
Para dar un mayor rigor en el cálculo del modelo cinemático de la rodilla se requiere parametrizarlos valores antropomór�cos en el miembro inferior para brindar una proporcionalidad en las medidasque vayan a tomarse [140].
Medida del fémur
Medida Trocantérea tibial-lateral: se hace por medio de la estructura ósea con la yema del dedo,sobre la parte lateral superior del muslo hasta el borde la cabeza del fémur en la rodilla [141].
Medida del peroné (Tibial medial-Maleolar medial): desde el borde de la cabeza del peroné en larodilla hasta donde termina en el tobillo por su cara anterior [142].
Perímetros de piernaEstas mediciones se realizan con el sujeto de pie, con el peso repartido entre ambas piernas [143].Muslo: tomado por debajo del pliegue del glúteo.Muslo medial: a nivel del punto medio trocantereo-tibial.Pantorrilla: máximo contorno de la pierna.
33
4.1.3. Prueba física: Adquisición de valores cinemáticos y señales EMG
La adquisición de los valores cinemáticos se hizo mediante un goniómetro; que permite medir elángulo de los ejercicios de fexión-extensión. Las señales EMG son capturadas simultáneamente a travésde un electromiógrafo super�cial mientras se realizan los ejercicios descritos a continuación. Luego dehacer una lectura sobre los músculos que participan en el movimiento de rodilla se determina queson 6 músculos, por limitaciones del equipo, debido a que el electromiógrafo sólo tiene 4 canales,y al ser necesario realizar una medición simultánea de los mismos se eligieron los 4 músculos másrepresentativos; 2 asociados al movimiento de �exión y 2 al de extensión [51]. Los 3 test muscularesse escogen por ser ejercicios comunes en el diagnóstico, no usan peso extra con pesas, mancuernas,máquinas de gimnasio, etc., lo que afectaría la velocidad y la aceleración, además, los ejercicios encadena cinética abierta son usados comúnmente en la rehabilitación de ACL [65, 144].
Señales EMG en pierna para movimiento en cadena cinemática abierta simple (�exiónsentado) El test muscular se da en diferentes momentos (este ciclo de momentos se hará cuatro vecespor paciente), sentado en banca o camilla y con máximo apoyo del muslo y pies al aire (sin calzado).
Momento 0 - 90° Reposo (no hay contracción) por un lapso de 2 segundos.
Momento 1 - Movimiento de extensión: se eleva el miembro inferior sin carga adicional hastalograr la mayor extensión posible (0°) (2 segundos).
Momento 2 - Mantener la extensión por dos segundos.
Momento 3 - Movimiento de �exión hasta volver a la posición inicial (2 segundos).
Momento 4 - No hay contracción
Señales EMG en pierna para movimiento en cadena cinemática abierta simple (Erguido)El test muscular se da en diferentes momentos (este ciclo de momentos se hará cuatro veces porpaciente).
Momento 0 - Reposo a 0° (no hay contracción) por un lapso de 2 segundos, de pie (erguido) conapoyo de los dos pies contra el suelo (sin calzado), derecho y sin curvar la columna, sujetándosede una silla o mesa para mantener el equilibrio.
Momento 1 - Movimiento de �exión: se eleva el miembro inferior lentamente (sin carga adicional)hasta lograr la mayor �exión posible (90° - 120° aprox) (2 segundos), no mover la parte de arribade la pierna; solamente la rodilla.
Momento 2 - Mantener la posición por dos segundos.
Momento 3 - Lentamente se realiza el movimiento de �exión hasta volver a la posición inicial (2segundos).
Momento 4 - No hay contracción.
34
Señales EMG en pierna para marcha simple El test muscular se da en diferentes momentos(este ciclo de momentos se hará una vez cada trayecto) 3 a 4 segundos por trayecto. En este ejerciciose busca ver la interacción de los músculos en �exión (Bíceps Femoral y Semitendinoso) y extensión(Recto Femoral y Vasto Medial) al mismo tiempo.
Momento 0 - Reposo a 0° (no hay contracción) por un lapso de 2 segundos, de pie (erguido) conapoyo de los dos pies contra el suelo (sin calzado), derecho y sin curvar la columna, luego seprocede a dar 4 pasos hacia adelante iniciando con el pie derecho, al 4to paso deben �nalizar lospies juntos como en la posición de reposo y dar un giro de 180° se espera 2 segundos y se realizael momento 1.
Momento 1 - Reposo a 0° (no hay contracción) por un lapso de 2 segundos, de pie (erguido) conapoyo de los dos pies contra el suelo (sin calzado), derecho y sin curvar la columna, luego seprocede a dar 4 pasos hacia adelante iniciando con el pie izquierdo.
4.2. Instrumentos
4.2.1. Primer equipo de toma de muestras
En la primera fase de la investigación se plantea el uso del Electromiografo de la UniversidadAutónoma de Manizales. Este electromiógrafo fue suministrado por el laboratorio de Neuro�siología,cuya directora es la Dra. Francia Restrepo. Este equipo no incluía un goniómetro lo cual precisó en eldiseño e implementación de este, para tomar de manera simultánea los ángulos en �exión-extensión dela rodilla para obtener el modelo de movimiento en el plano sagital.
Electromiógrafo de la Universidad Autónoma El electromiógrafo suministrado por el labora-torio de Neuro�siología de la Universidad Autónoma, es el electromiógrafo The Sierra Wave® ofrecidopor laboratorios Cadwell. El sistema cuenta con 2 canales simultáneos, añade análisis para unidadesmotoras simples (SMUA), también incluye visualización de las capturas de datos a través de un entornográ�co. Incluye electrodos para el registro Super�cial de señales EMG y también agujas para la ad-quisición de señales EMG intramusculares. Este equipo es usado para estudiar y diagnosticar diversasenfermedades: enfermedades neuronales, esclerosis múltiple, estudios de sueño, fatiga muscular, movi-mientos anormales, síndrome del túnel carpiano. En la Figura 14 se puede observar el electromiógrafode la Universidad, que cuenta con un equipo portátil para la adquisición y visualización de los registrosEMG.
Goniómetro Es un dispositivo que se usa para evaluar el rango de movimiento, ya que mide losángulos articulares [145].
Se utilizó una metodología de diseño mecatrónico QFD [146, 99, 147] que está basada en la plani-�cación y garantía de la calidad; donde las necesidades del cliente se convierten en los requerimientostécnicos y esto se traduce en la plani�cación de los procesos y las especi�caciones del producto [146].
QFD permitió la realización de las siguientes actividades para la recolección y organización de losdatos requeridos:
Identi�cación de variables a medir (grados de movimiento en el plano sagital).
35
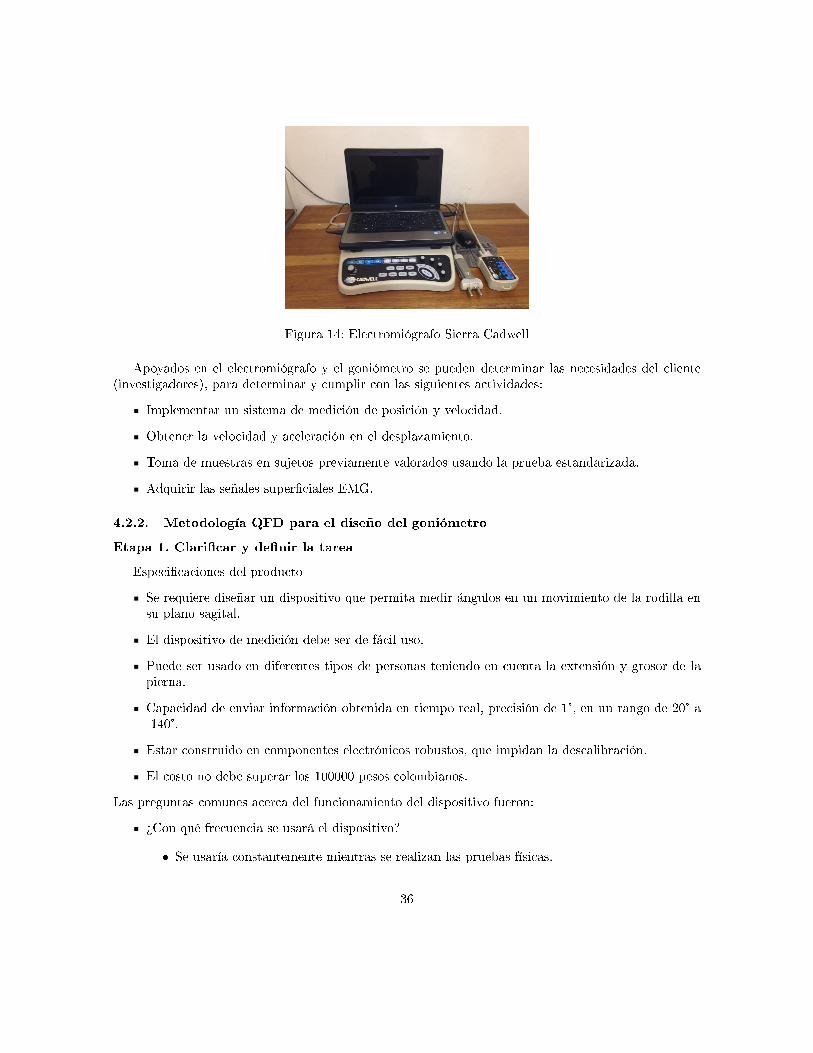
Figura 14: Electromiógrafo Sierra Cadwell
Apoyados en el electromiógrafo y el goniómetro se pueden determinar las necesidades del cliente(investigadores), para determinar y cumplir con las siguientes actividades:
Implementar un sistema de medición de posición y velocidad.
Obtener la velocidad y aceleración en el desplazamiento.
Toma de muestras en sujetos previamente valorados usando la prueba estandarizada.
Adquirir las señales super�ciales EMG.
4.2.2. Metodología QFD para el diseño del goniómetro
Etapa 1. Clari�car y de�nir la tarea
Especi�caciones del producto
Se requiere diseñar un dispositivo que permita medir ángulos en un movimiento de la rodilla ensu plano sagital.
El dispositivo de medición debe ser de fácil uso.
Puede ser usado en diferentes tipos de personas teniendo en cuenta la extensión y grosor de lapierna.
Capacidad de enviar información obtenida en tiempo real, precisión de 1°, en un rango de 20° a-140°.
Estar construido en componentes electrónicos robustos, que impidan la descalibración.
El costo no debe superar los 100000 pesos colombianos.
Las preguntas comunes acerca del funcionamiento del dispositivo fueron:
¾Con qué frecuencia se usará el dispositivo?
� Se usaría constantemente mientras se realizan las pruebas físicas.
36
¾Será un dispositivo móvil o sólo para uso en laboratorio?
� Aunque puede usarse en cualquier parte, la idea es que sea usado en un laboratorio por unprofesional en rehabilitación.
¾Qué tipo de fuente de alimentación tiene?
� Como debe sujetarse a la pierna para adquirir los ángulos, requiere de una batería de pocopeso para su alimentación.
¾En qué formato trasmite los datos obtenidos?
� En formato ASCII
¾Requiere algún dispositivo adicional para trasmitir datos al computador?
� Cable serial o una interfaz Bluetooth
¾Tiene capacidad de medir otra variable a partir de esta, cómo la velocidad?
� Se puede calcular, pero no directamente desde el dispositivo.
¾Qué tipo de soporte tendrá el dispositivo de instrumentación y como será la ergonomía para elmovimiento de la rodilla?
� Preferiblemente un soporte que presente una alta sujeción y que permita una alta movilidady comodidad.
¾Puede sincronizarse al uso de un Electromiógrafo?
� Con la menor diferencia entre las muestras que sea posible.
De las preguntas anteriores se concluyó que:El uso de un goníometro es muy común, pero las medidas que se realizan son generalmente hechas
de forma totalmente tradicional y manual. Se mide capacidad de desplazamiento y el tiempo que tomahacerlo, pero no hay relación directa entre el desplazamiento y tiempo en el transcurso del movimiento.En el caso particular de los usuarios cliente (pacientes), se usan ejercicios isométricos para evitar riesgosde daño articular y meniscal. Esta medida se registra para un movimiento en particular; en este caso,cadena cinética abierta (CCA) en la cual teniendo el cuerpo sentado, se realiza movimiento de �exión-extensión de la rodilla sin que el pie tenga apoyo sobre la super�cie.
También se notó la importancia de la interfaz de comunicación y software involucrado para hacerllegar los datos al computador, además de la posibilidad de que los datos se almacenen en el mismodispositivo para lograr movilidad y toma de datos sin utilizar conexión permanente a un computador.El costo del dispositivo dispuesto a asumir podría variar entre los $ 50000 y los $ 100000, dependiendode la movilidad y transmisión de los datos desde el dispositivo al computador.
El soporte al que estaría asociado el goniómetro debe permitir la sujeción a cualquier rodilla usandoun material que permita la repetibilidad en movimientos en el plano sagital de la rodilla.
Lo más importante que se consideró para el diseño fue el la relación en el tiempo/desplazamiento(Posición en que se encuentra la pierna en un instante de tiempo determinado) y será el valor agregadoal producto.
37
Los �QUE�
1. El dispositivo es ajustable a miembros inferiores diferentes en tamaño y longitud.
2. El dispositivo es confortable para miembros inferiores diferentes en tamaño y longitud.
3. El dispositivo es liviano y permite el movimiento de la extremidad sin esfuerzos mayores adicio-nales.
4. El dispositivo permite una comunicación en tiempo real y con�able con el computador.
5. El dispositivo permite una fácil puesta en marcha.
6. El dispositivo protege al usuario de lesiones.
7. El dispositivo es de bajo consumo de energía.
Con esto se elaboró una tabla donde se jerarquiza cada uno de los ítems que serian las necesidades quedeben suplirse.
Etapa 2. Determinar las funciones y sus estructuras
En esta etapa se analizan las posibles soluciones o mecanismos que sirvan para cumplir con losrequerimientos.
El sistema debe permitir un movimiento libre sin ejercer mayor carga adicional al movimiento(sensibilidad).
Sistema de sujeción a la pierna por medio de 2 agarres de velcro envolventes para medir eldesplazamiento del miembro.
Sistema graduable de barras que hagan contacto en la parte posterior y anterior del miembropara marcar el desplazamiento. Los contactos deberán contar con almohadillas o espumas paragarantizar el confort.
Debe ser fabricado en forma óptima para reducir componentes, tamaño y peso.
Comunicación cableada hacia el computador.
Comunicación serial hacia el computador, agregando la componente de tiempo en el computador.
Trasmisión de datos en tiempo real hacia la computadora, generando la grá�ca en tiempo realde la medida del dispositivo.
Utilizar un medidor con cualidades de linealidad alta, para reducir cómputo y mejorar la lecturade los datos, en caso de problemas de linealidad se mejora aplicando la ecuación en el hardwareque es más rápido en este proceso.
Diseño agradable a la vista.
El material de los elementos de extensión sería el compuesto propio de la impresora Zprinter Z250en la cual se imprimirá el prototipo, el compuesto es un polvo cerámico de buena resistencia yno conductor eléctrico.
38
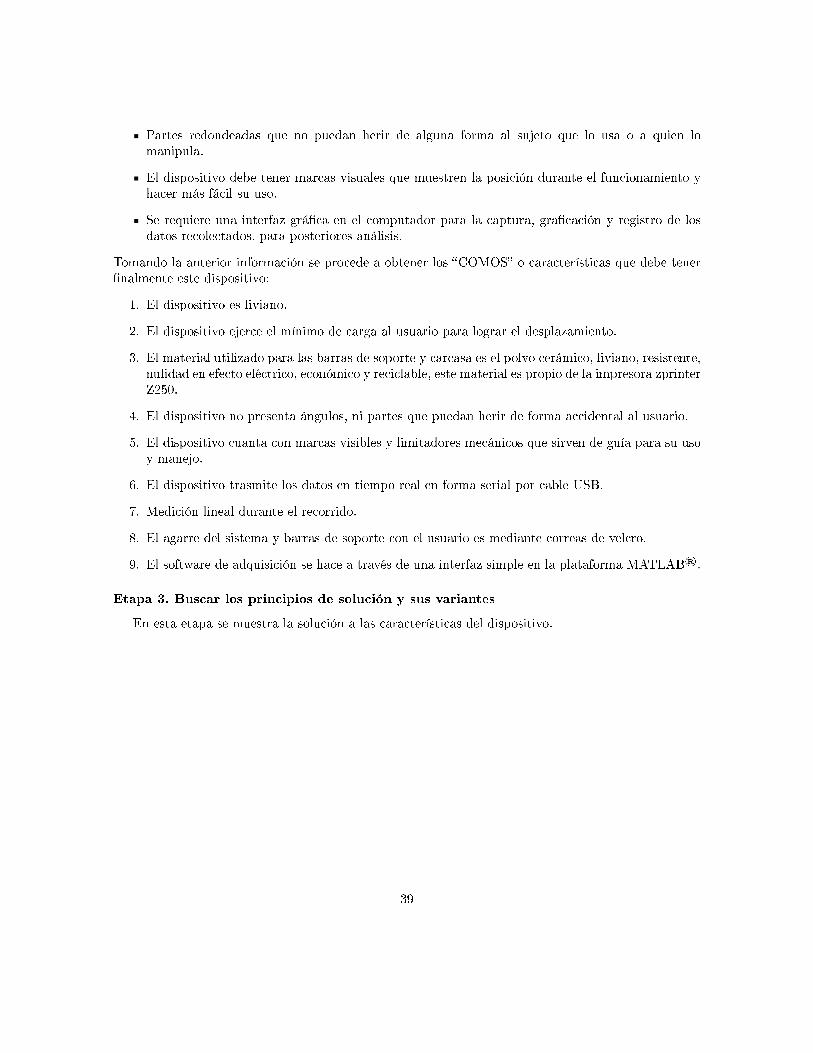
Partes redondeadas que no puedan herir de alguna forma al sujeto que lo usa o a quien lomanipula.
El dispositivo debe tener marcas visuales que muestren la posición durante el funcionamiento yhacer más fácil su uso.
Se requiere una interfaz grá�ca en el computador para la captura, gra�cación y registro de losdatos recolectados, para posteriores análisis.
Tomando la anterior información se procede a obtener los �COMOS� o características que debe tener�nalmente este dispositivo:
1. El dispositivo es liviano.
2. El dispositivo ejerce el mínimo de carga al usuario para lograr el desplazamiento.
3. El material utilizado para las barras de soporte y carcasa es el polvo cerámico, liviano, resistente,nulidad en efecto eléctrico, económico y reciclable, este material es propio de la impresora zprinterZ250.
4. El dispositivo no presenta ángulos, ni partes que puedan herir de forma accidental al usuario.
5. El dispositivo cuanta con marcas visibles y limitadores mecánicos que sirven de guía para su usoy manejo.
6. El dispositivo trasmite los datos en tiempo real en forma serial por cable USB.
7. Medición lineal durante el recorrido.
8. El agarre del sistema y barras de soporte con el usuario es mediante correas de velcro.
9. El software de adquisición se hace a través de una interfaz simple en la plataforma MATLAB®.
Etapa 3. Buscar los principios de solución y sus variantes
En esta etapa se muestra la solución a las características del dispositivo.
39
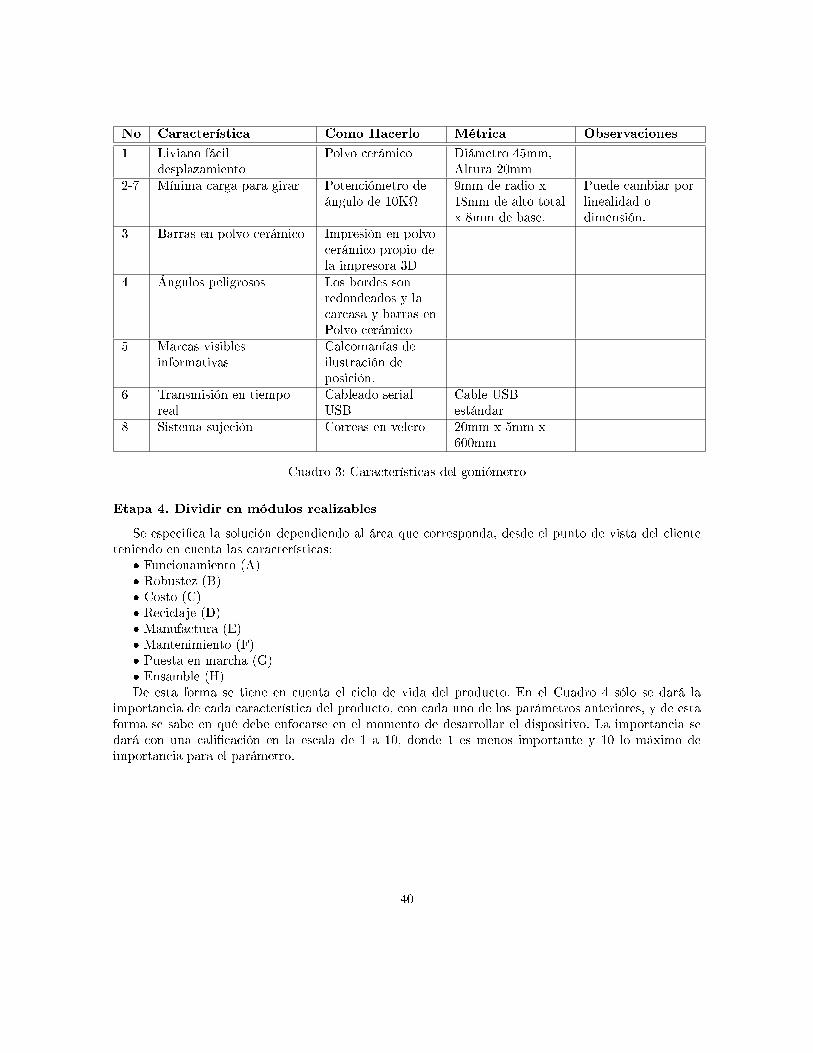
No Característica Como Hacerlo Métrica Observaciones
1 Liviano fácildesplazamiento
Polvo cerámico Diámetro 45mm,Altura 20mm
2-7 Mínima carga para girar Potenciómetro deángulo de 10KW
9mm de radio x18mm de alto totalx 8mm de base.
Puede cambiar porlinealidad odimensión.
3 Barras en polvo cerámico Impresión en polvocerámico propio dela impresora 3D
4 Ángulos peligrosos Los bordes sonredondeados y lacarcasa y barras enPolvo cerámico
5 Marcas visiblesinformativas
Calcomanías deilustración deposición.
6 Transmisión en tiemporeal
Cableado serialUSB
Cable USBestándar
8 Sistema sujeción Correas en velcro 20mm x 5mm x600mm
Cuadro 3: Características del goniómetro
Etapa 4. Dividir en módulos realizables
Se especi�ca la solución dependiendo al área que corresponda, desde el punto de vista del clienteteniendo en cuenta las características:
� Funcionamiento (A)� Robustez (B)� Costo (C)� Reciclaje (D)� Manufactura (E)� Mantenimiento (F)� Puesta en marcha (G)� Ensamble (H)De esta forma se tiene en cuenta el ciclo de vida del producto. En el Cuadro 4 sólo se dará la
importancia de cada característica del producto, con cada uno de los parámetros anteriores, y de estaforma se sabe en qué debe enfocarse en el momento de desarrollar el dispositivo. La importancia sedará con una cali�cación en la escala de 1 a 10, donde 1 es menos importante y 10 lo máximo deimportancia para el parámetro.
40
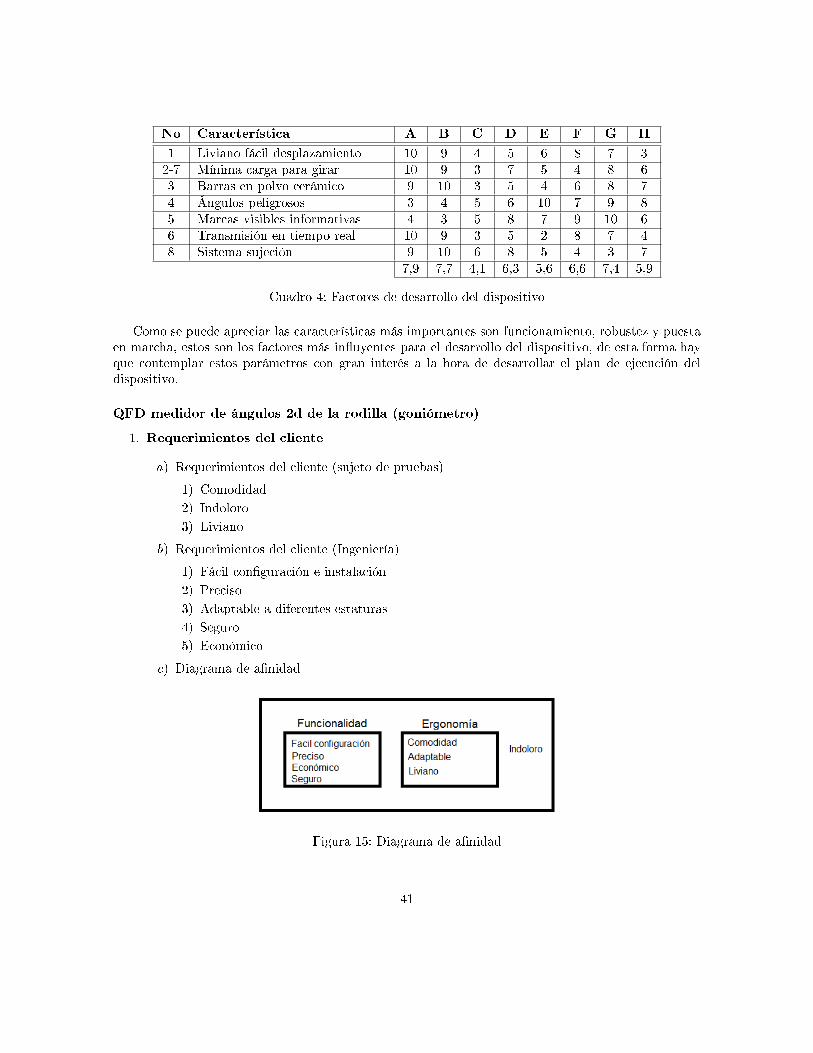
No Característica A B C D E F G H
1 Liviano fácil desplazamiento 10 9 4 5 6 8 7 32-7 Mínima carga para girar 10 9 3 7 5 4 8 63 Barras en polvo cerámico 9 10 3 5 4 6 8 74 Ángulos peligrosos 3 4 5 6 10 7 9 85 Marcas visibles informativas 4 3 5 8 7 9 10 66 Transmisión en tiempo real 10 9 3 5 2 8 7 48 Sistema sujeción 9 10 6 8 5 4 3 7
7,9 7,7 4,1 6,3 5,6 6,6 7,4 5,9
Cuadro 4: Factores de desarrollo del dispositivo
Como se puede apreciar las características más importantes son funcionamiento, robustez y puestaen marcha, estos son los factores más in�uyentes para el desarrollo del dispositivo, de esta forma hayque contemplar estos parámetros con gran interés a la hora de desarrollar el plan de ejecución deldispositivo.
QFD medidor de ángulos 2d de la rodilla (goniómetro)
1. Requerimientos del cliente
a) Requerimientos del cliente (sujeto de pruebas)
1) Comodidad2) Indoloro3) Liviano
b) Requerimientos del cliente (Ingeniería)
1) Fácil con�guración e instalación2) Preciso3) Adaptable a diferentes estaturas4) Seguro5) Económico
c) Diagrama de a�nidad
Figura 15: Diagrama de a�nidad
41
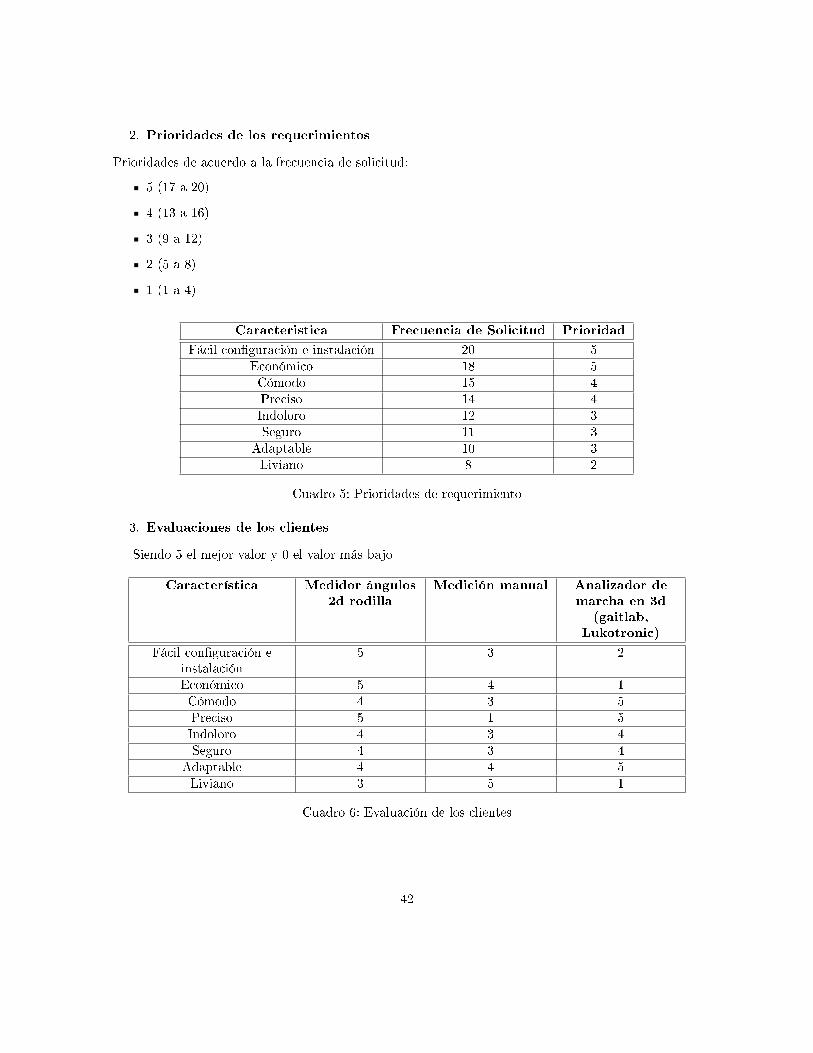
2. Prioridades de los requerimientos
Prioridades de acuerdo a la frecuencia de solicitud:
5 (17 a 20)
4 (13 a 16)
3 (9 a 12)
2 (5 a 8)
1 (1 a 4)
Caracteristica Frecuencia de Solicitud Prioridad
Fácil con�guración e instalación 20 5Económico 18 5Cómodo 15 4Preciso 14 4Indoloro 12 3Seguro 11 3
Adaptable 10 3Liviano 8 2
Cuadro 5: Prioridades de requerimiento
3. Evaluaciones de los clientes
Siendo 5 el mejor valor y 0 el valor más bajo
Característica Medidor ángulos2d rodilla
Medición manual Analizador demarcha en 3d
(gaitlab,Lukotronic)
Fácil con�guración einstalación
5 3 2
Económico 5 4 1Cómodo 4 3 5Preciso 5 1 5Indoloro 4 3 4Seguro 4 3 4
Adaptable 4 4 5Liviano 3 5 1
Cuadro 6: Evaluación de los clientes
�
42

4. Requerimientos técnicos
Sistema medidor de velocidad.
Sistema medidor de ángulos.
Sistema de sujeción.
Modelo cinemático.
Sistema de adquisición de datos en tiempo real.
Software visualización.
Algoritmo de análisis de ángulo.
Protección de giro.
43
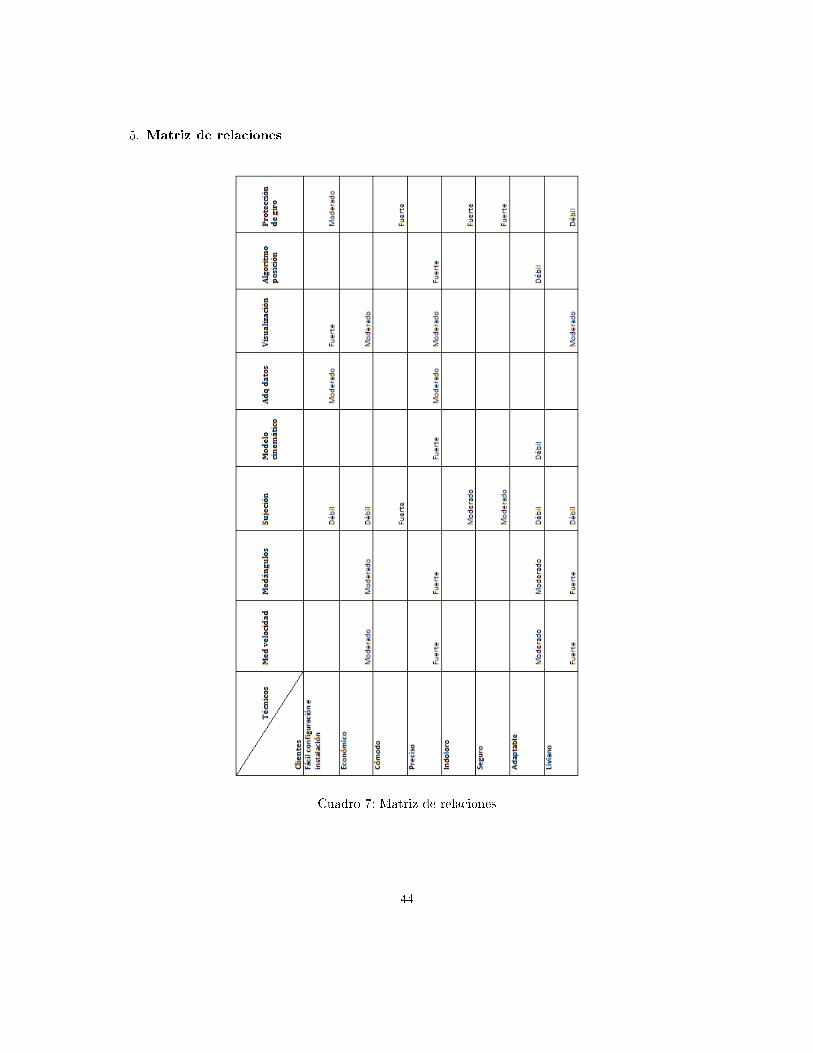
5. Matriz de relaciones
Cuadro 7: Matriz de relaciones
44

6. Evaluación de ingeniería
Cuadro 8: Evaluación de ingeniería
Con los parámetros de�nidos por la metodología QFD se modeló el goniómetro usando la herra-mienta computacional SOLIDWORKS �.
45
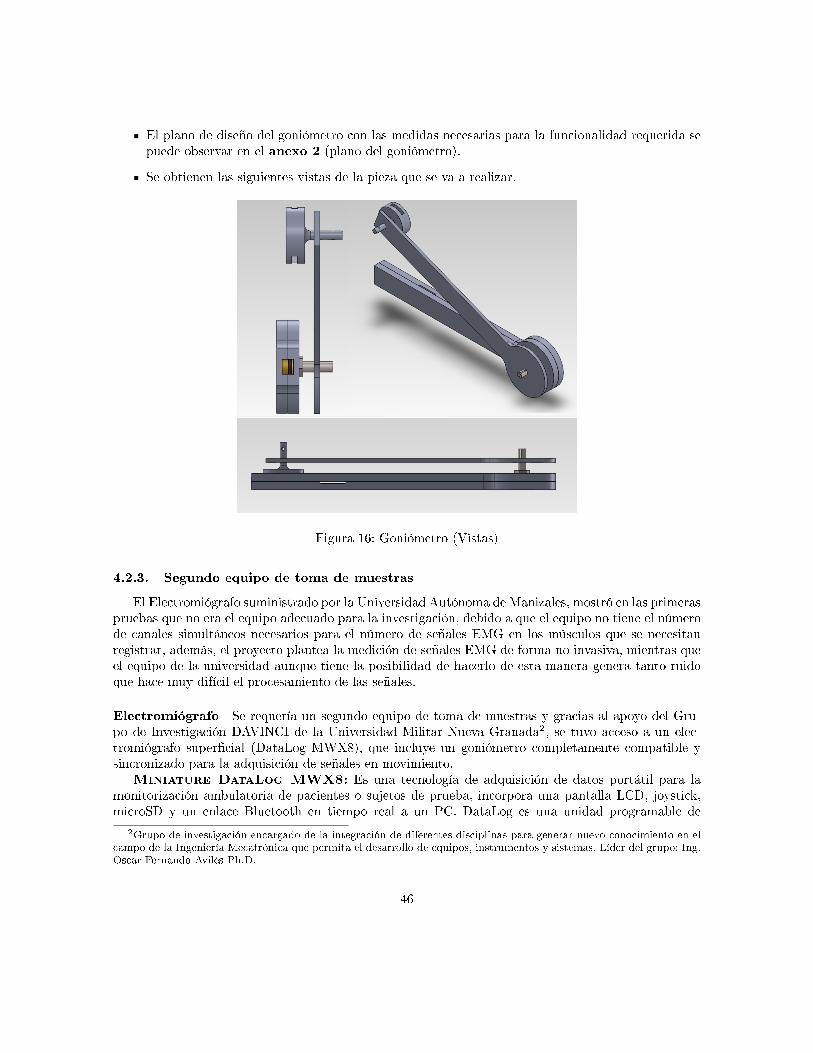
El plano de diseño del goniómetro con las medidas necesarias para la funcionalidad requerida sepuede observar en el anexo 2 (plano del goniómetro).
Se obtienen las siguientes vistas de la pieza que se va a realizar.
Figura 16: Goniómetro (Vistas)
4.2.3. Segundo equipo de toma de muestras
El Electromiógrafo suministrado por la Universidad Autónoma de Manizales, mostró en las primeraspruebas que no era el equipo adecuado para la investigación, debido a que el equipo no tiene el númerode canales simultáneos necesarios para el número de señales EMG en los músculos que se necesitanregistrar, además, el proyecto plantea la medición de señales EMG de forma no invasiva, mientras queel equipo de la universidad aunque tiene la posibilidad de hacerlo de esta manera genera tanto ruidoque hace muy difícil el procesamiento de las señales.
Electromiógrafo Se requería un segundo equipo de toma de muestras y gracias al apoyo del Gru-po de Investigación DAVINCI de la Universidad Militar Nueva Granada2, se tuvo acceso a un elec-tromiógrafo super�cial (DataLog MWX8), que incluye un goniómetro completamente compatible ysincronizado para la adquisición de señales en movimiento.
Miniature DataLog MWX8: Es una tecnología de adquisición de datos portátil para lamonitorización ambulatoria de pacientes o sujetos de prueba, incorpora una pantalla LCD, joystick,microSD y un enlace Bluetooth en tiempo real a un PC. DataLog es una unidad programable de
2Grupo de investigación encargado de la integración de diferentes disciplinas para generar nuevo conocimiento en elcampo de la Ingeniería Mecatrónica que permita el desarrollo de equipos, instrumentos y sistemas. Líder del grupo: Ing.Oscar Fernando Avilés Ph.D.
46
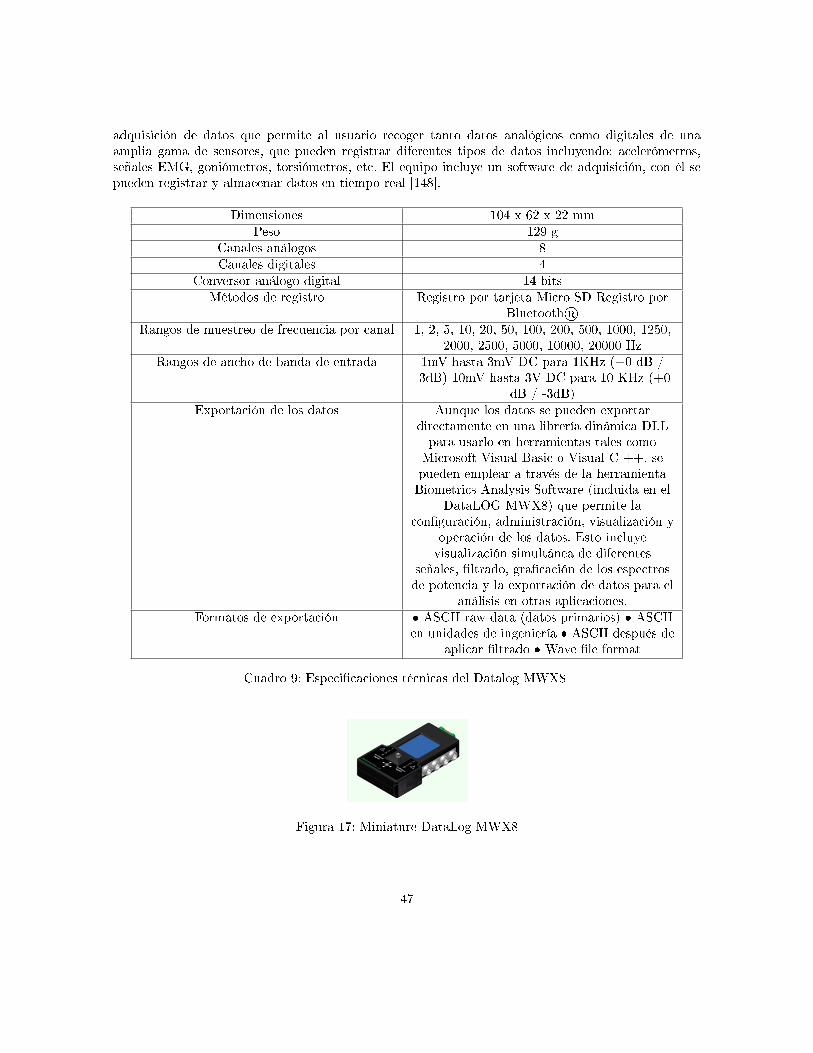
adquisición de datos que permite al usuario recoger tanto datos analógicos como digitales de unaamplia gama de sensores, que pueden registrar diferentes tipos de datos incluyendo: acelerómetros,señales EMG, goniómetros, torsiómetros, etc. El equipo incluye un software de adquisición, con él sepueden registrar y almacenar datos en tiempo real [148].
Dimensiones 104 x 62 x 22 mmPeso 129 g
Canales análogos 8Canales digitales 4
Conversor análogo digital 14 bitsMétodos de registro Registro por tarjeta Micro SD Registro por
Bluetooth®Rangos de muestreo de frecuencia por canal 1, 2, 5, 10, 20, 50, 100, 200, 500, 1000, 1250,
2000, 2500, 5000, 10000, 20000 HzRangos de ancho de banda de entrada 1mV hasta 3mV DC para 1KHz (+0 dB /
-3dB) 10mV hasta 3V DC para 10 KHz (+0dB / -3dB)
Exportación de los datos Aunque los datos se pueden exportardirectamente en una librería dinámica DLLpara usarlo en herramientas tales comoMicrosoft Visual Basic o Visual C ++, sepueden emplear a través de la herramientaBiometrics Analysis Software (incluida en el
DataLOG MWX8) que permite lacon�guración, administración, visualización y
operación de los datos. Esto incluyevisualización simultánea de diferentes
señales, �ltrado, gra�cación de los espectrosde potencia y la exportación de datos para el
análisis en otras aplicaciones.Formatos de exportación � ASCII raw data (datos primarios) � ASCII
en unidades de ingeniería � ASCII después deaplicar �ltrado � Wave �le format
Cuadro 9: Especi�caciones técnicas del Datalog MWX8
Figura 17: Miniature DataLog MWX8
47

Goniómetro El dispositivo de adquisición incluye un goniómetro SG150B para medición de ángulosen �exión-extensión, consta de 2 canales, una precisión de ±2° medido en un intervalo de±90°, trabajaentre los 10°C y 50° C de temperatura y tiene un peso de 28 gramos [148]. El cual esta estandarizadoy es compatible con las señales registradas por el DataLog MWX8.
Figura 18: Goniómetro
Electrodos Electrodo de medida superficial: Es un preampli�cador diseñado y fabricadopor la empresa Biometric®. Tiene una muy alta impedancia de entrada, mayor de 10.000.000 MW.Trabaja en un ancho de banda entre 20 y 460 Hz. No requiere gel o cremas. La calidad de la señalgrabada es excelente tanto para aplicaciones estáticas y/o dinámicas [148].
Figura 19: Electrodo de medida super�cial
En una segunda toma de muestras el equipo es suministrado por Tecnoparque SENA nodo Mani-zales.
4.3. Modelo del movimiento de la rodilla (Velocidad y Aceleración)
En el caso de la articulación de la rodilla, sólo se tendrán en cuenta 2 eslabones: el formado por elfémur y por el conjunto de tibia y peroné. Aunque los parámetros DH no dan información útil acercade la velocidad y aceleración, pueden brindar información importante acerca del desplazamiento. Semuestran estos parámetros para un test muscular sentado (cadena cinética abierta) en 2d.
1A2 =
Cosθ1 −Cosα1Sinθ1 Sinα1Sinθ1 α1Cosθ1Sinθ1 Cosα1Sinθ1 −Sinα1Cosθ1 α1Sinθ1
0 Sinα1 Cosα1 d10 0 0 1
48

i θi αi ai di
1 θ1 0 l1 02 0 0 0 l2
Cuadro 10: Parámetros DH en rodilla para cadena cinética abierta
donde l1(tibia), l2(muslo). La matriz quedaría, tomando los valores antropomór�cos medidos en laspruebas físicas y los ángulos obtenidos por la medición con el goniómetro en sujetos de control (connormalidad en rodilla).
1A2 =
Cosθ1 0 0 46 ∗ Cosθ1Sinθ1 Sinθ1 0 46 ∗ Sinθ1
0 0 1 550 0 0 1
donde l1=46 cm y l2= 55 cm (valores medios). El ángulo θ1 tendrá valores entre -2,5° y 75,237°
(valores máximos y mínimos medidos por el goniómetro).Según lo revisado en la sección 3.3.1 para obtener las velocidades y aceleración a partir de los
ángulos, debe derivarse el vector de ángulos dado por el goniómetro. La señal dada por el goniómetro sedenotará como señal de desplazamiento. Este proceso se realizó con la señal de goniometría suavizada.Se utilizó el teorema de Taylor3 para obtener las 2 señales. Con la primera derivada se obtiene lavelocidad y al derivarla nuevamente la aceleración.
4.4. Procesamiento de la señal
4.4.1. Selección de las señales
Luego de la adquisición de la señal EMG se procedió a recortarla directamente desde el softwareBiometrics Analysis (incluida en el DataLOG MWX8), este recorte de las señales se dio con un criteriobasado en la mayor uniformidad de la señal y que estuviera completamente asociada a un correcto y�uido movimiento (un paso, un test muscular completo) en los test musculares.
Todas las señales se renombran y se agrupan por el registro EMG de cada uno de los 4 músculo delos 11 sujetos de control para cada test muscular que se realizó. Se realiza el mismo procedimiento deagrupamiento para los sujetos con patología de rodilla. Por aparte se tienen los ángulos obtenidos porel goniómetro para cada sujeto.
Aunque a las señales obtenidas se les puede aplicar directamente un �ltro NOTCH (rechaza banda)a los 60 Hz para quitar el componente de AC, no es necesario debido a que los dispositivos de instru-mentación se alimentan con una batería, además este �ltrado puede eliminar información importantede la señal [150].
4.4.2. Preprocesamiento de la señal
Después de agrupar y recortar la señal con los criterios establecidos en la sección 4.4.1 se prepro-cesa la señal usando la plataforma MATLAB®. Se realizan los siguientes pasos con todas las señalesde EMG adquiridas:
3Teorema que permite obtener aproximaciones polinómicas de una función en un entorno de cierto punto en que lafunción sea diferenciable [149].
49

Aunque el ancho de banda de las señales EMG generalmente se encuentra situado entre los 20Hz y los 500 Hz [151, 21], se toma como ancho de banda de las señales EMG las registradas por loselectrodos que funcionan entre los 20 Hz y los 460 Hz [148], se aplica un �ltro pasabanda Chebyshevde segundo orden para eliminar señales fuera del rango.
A la señal adquirida por el goniómetro se le aplicó un suavizado para eliminar ruido de la señal.El modelo general conocido como 1-D de-noising esta dado por
s(n) = f(n) + σe(n) (35)
donde n =0,1,2,...m-1 y e(n) es el ruido y f(n) es la señal normal.
4.4.3. Caracterización de la señal EMG
Con base en la literatura, se determinan las siguientes características para tener un mayor potencialde clasi�cación de normalidad y anormalidad [152, 153, 154, 155, 106].
Características asociadas al espectrograma: Utilizando la siguiente expresión:
P (i, j) = |SSTFT (i, j)|2 (36)
se calcula la densidad espectral de potencia de la señal.Con la expresión (36), se obtienen los principales componentes de potencia de la señal EMG. Los
principales componentes de potencia de la señal EMG están concentrados en el rango de frecuenciasde 20 a 250 Hz [150]. Debido a lo anterior se genera un vector con la concentración de potencia entre20 y 250 Hz para cada instante de tiempo. El vector de concentración es escalado (105) para obtenervalores más representativos de la señal. Con este vector se seleccionan 2 características.
1. Al sumar todos los componentes del vector se produce una característica de la concentracióntotal de potencia en el movimiento realizado (v1).
2. Se hallan 2 picos que tengan una distancia mínima de 400 (lo cual representaría 400 ms), que esel tiempo mínimo que tarda en producirse una reactivación muscular4. La distancia entre estos2 picos se toma como característica de reactivación (v2).
Las características de rango y valor máximo absoluto se obtienen usando cada señal x adquirida:
Rango: Se halla el máximo y mínimo de la señal para calcular el rango de la misma (v3).
Rango = max(x)−min(x) (37)
Valor máximo absoluto: Se calcula el máximo de todos los valores de la señal en valor absoluto(v4).
Maxabs = max |x| (38)
4Tiempo mínimo que se determinó a partir de la observación de las grá�cas de las señales.
50

MNF: La frecuencia media MNF (v5) puede ser expresada como:
MNF =
M∑j=1
fjPj/
M∑j=1
Pj (39)
donde Pj es el espectro de potencia de las señales EMG en la frecuencia j y fj es la frecuencia en j[156].
MDF: La frecuencia mediana MDF (v6) es un valor de la frecuencia, a la que el espectro de potenciade las señales EMG se divide en dos regiones con una potencia integrada igual. Se puede expresarcomo: [156]
MDF∑j=1
Pj =
M∑j=MDF
Pj =1
2
M∑j=1
Pj (40)
Se ha demostrado que tomar las características MNF y MDF son bastante utiles para registrar lascontracciones dinámicas cíclicas especialmente como un indicador de fatiga [156].
Descomposición en Wavelets: A cada señal EMG de cada músculo, se le aplica una Waveletmadre de tipo Daubechies 4 (DB4), la cual se ha determinado como una adecuada Wavelet madre paraanálisis de señales EMG [157, 158, 159, 113]. Con esta función, se extraen los picos de la descomposiciónen Wavelets, generados por los MUAP de la señal EMG [159]. Generalmente se emplean entre 3 y 5niveles [158, 153, 113]. Se escogieron 4 niveles para dar un buena resolución.
Con estos atributos, se obtienen 11 picos máximos obtenidos de la siguiente descomposición: 1máximo del coe�ciente de aproximación 4, 1 máximo del coe�ciente de detalle 4, 2 del coe�ciente dedetalle 3, 3 del coe�ciente de detalle 2 y 4 del coe�ciente de detalle 1 (v7:17).
Se obtienen además las medias y las varianzas de los coe�cientes de detalle de los 4 niveles y delcoe�ciente de aproximación (v18:27).
Al �nal se tienen las siguientes características por cada señal:
1. El valor máximo absoluto.
2. El rango.
3. Concentración total de potencia (obtenida a través del espectrograma).
4. Distancia de activación (obtenida a través del espectrograma).
5. MDF.
6. MNF.
7. 11 picos de la descomposición en Wavelets.
8. 4 medias de los coe�cientes de detalle y 1 del coe�ciente de aproximación.
9. 4 varianzas de los coe�cientes de detalle y 1 del coe�ciente de aproximación.
51

Se normalizaron las características EMG usando un modelo normal estándar, es decir, con media µ=0 y la desviación estándar σ=1, usando la expresión:
X =V − µ(V )
σ(V )(41)
donde V es la matriz de características de EMG sin normalizar.En total se tiene 27 características para cada uno de los cuatro músculos de cada i -ésimo paciente
y en un total de 3 pruebas musculares. Es decir una matriz de 11 × 27 para el grupo de control yel mismo tamaño para sujetos con patología de rodilla. El siguiente es el conjunto normalizado querepresenta las características de EMG:
Xji ∈ R27 (42)
donde i = {1, 2, ..., 22} que corresponden al número de sujetos de prueba y j = {1, ..., 4} que corres-ponde a los cuatro músculos analizados.
4.4.4. Caracterización de las señales de movimiento
Con las 3 señales de movimiento: desplazamiento, velocidad y aceleración, adquiridas con el gonió-metro (Gon), se extraen las siguientes características.
µ(Gon) para las 3 señales de movimiento.
σ2(Gon) para la 3 señales de movimiento.
Máx(Gon) para las 3 señales de movimiento.
Min(Gon) de las 3 señales de movimiento.
Se tendrá en consecuencia una matriz completa de 12 características para cada sujeto de prueba normaly anormal (22× 12) para cada uno de los test musculares.
Como en el caso anterior se normalizan las características obtenidas de goniometría usando unmodelo normal estándar.
El conjunto normalizado que representa las características de goniometría está representado por:
Yi ∈ R12 (43)
donde ies el número de sujetos de prueba.Por lo tanto, el conjunto de características totales tomadas es:
ζ = F (X,Y ) (44)
donde X es el conjunto de las características normalizadas de EMG y Y es el conjunto de las caracte-rísticas normalizadas de goniometría.
52

4.5. Clasi�cación
4.5.1. Entradas escogidas para la clasi�cación
Se de�nen 3 clases o grupos de muestras para ser analizados en los diferentes clasi�cadores. Lasmuestras tomadas al grupo de control, las muestras tomadas a sujetos con alguna lesión de ACL (lalesión más común) y un grupo con las muestras tomadas a otras patologías de rodilla.
Clase I: Normales (Grupo de control)
Clase II: ACL (Muestras lesión ACL)
Clase III: Otras (Muestras diferentes tipos de lesión)
Combinaciones con las características de las señales EMG Primero se agrupan las carac-terísticas generadas de cada músculo para las tres clases y para todos los movimientos. Después secomparan estas características totales con las de otro músculo.
Esta comparación se realizó basado en el antagonismo5 de los músculos en el movimiento de ex-tensión. El músculo Recto femoral (RF) y el vasto medial (VM) tienen en extensión como músculosantagónicos el Bíceps femoral (BF) y el semitendinoso (ST) [50].
Se hacen las pruebas entre las características de los siguientes músculos:
Externos ⇒ RF con BF marcha, RF con BF pie y RF con BF sentado.
Internos⇒ VM con ST marcha, VM con ST pie y VM con ST sentado.
Cruzado 1 ⇒ RF con ST marcha, RF con ST pie y RF con ST sentado.
Cruzado 2⇒ VM con BF marcha, VM con BF pie y VM con BF sentado.
Combinaciones con las características de las señales de movimiento Por otro lado se agrupanlas 12 características de movimiento producidas por cada test muscular en normalidad y anormalidad.Entonces quedan 3 grupos de características de movimiento: Características de señales en marcha(CSMM), características de señales de pie (CSMP) y características de señales sentado (CSMS). Estascaracterísticas son agregadas a los clasi�cadores para observar la detección de normalidad o anorma-lidad sin tener en cuenta las características de las señales EMG.
Combinaciones de las características de las señales EMG más las características del mo-vimiento Las características de movimiento se agregan a las características de los músculos pararealizar una nueva clasi�cación y observar el efecto producido.
Externos ⇒ {RF con BF marcha , CSMM}, {RF con BF pie, CSMP } y {RF con BF sentado,CSMS}.
Internos⇒ {VM con ST marcha , CSMM}, {VM con ST pie, CSMP} y {VM con ST sentado,CSMS}.
5Los músculos antagonistas actúan en oposición y producen el control y la graduación necesaria para ejecutar losmovimientos contrarios, para este caso son los que permiten la �exión [160].
53

Cruzado 1 ⇒ {RF con ST marcha, CSMM}, {RF con ST pie, CSMP} y {RF con ST sentado,CSMS}.
Cruzado 2⇒ {VM con BF marcha, CSMM}, {VM con BF pie, CSMP} y {VM con BF sentado,CSMS}.
4.5.2. ANN
La ANN usada es un perceptrón multicapa con entrenamiento de retropropagación. Donde porestándar se toman de las muestras de entrada: 70% para entrenar, 15% para validación y 15% paralas pruebas [124]. Se seleccionan 10 neuronas en la capa oculta, con 10 épocas de entrenamiento. Seentrena la red y se obtiene como resultado la matriz de confusión con la que se determina el desempeñode la ANN en el proceso de clasi�cación. Se determinan los vectores de salida de cada una de las señales(etiquetas), donde se especi�ca cada señal a que clase corresponde utilizando valores binarios y conestos valores se veri�ca si se logra su clasi�cación, de esta forma se obtienen 3 clases en el vector desalida para evaluar. Clase I (100), Clase II (001) y Clase III (010). En la Figura 20 se muestra unamatriz de confusión resultante.
Figura 20: Matriz de confusión
Donde la casilla inferior derecha muestra la precisión (ACC), es decir, la probabilidad de clasi-�caciones correctas alcanzadas por la ANN (Tasa de Acierto). La Tasa de Error viene dada por elporcentaje de clasi�caciones incorrectas obtenidas por la ANN. La precisión en la clasi�cación estadada por [161, 162]
Precision(ACC) =tpos + tneg
tpos + fpos + tneg + fneg(45)
donde tpos son los verdaderos positivos, tneg son los verdaderos negativos, fpos son los falsos positivos yfneg son los falsos negativos [162]. Con los anteriores valores también se podría calcular la sensibilidady la especi�cidad
Sensibilidad(Se) =tpos
tpos + fneg, Especificidad(Sp) =
tnegtneg + fpos
(46)
4.5.3. Otros algoritmos de clasi�cación
Todos los clasi�cadores usan la plataforma MATLAB®. Para PCA-LDA, se extraen los componen-tes principales de cada uno de los conjuntos de características extraídas previamente. Luego se realizaun análisis discriminante y se entrega el error de esta clasi�cación. Se utiliza como salida, el vectoretiquetas y se especi�ca el número de componentes principales a utilizar, cuando este supera el umbral
54

del 80% del valor ACC, muestra el número de componentes principales utilizadas para lograrlo. Parael algoritmo de agrupamiento k-means se ingresa el vector características y se obtiene la matriz deconfusión con el valor del ACC.
En los casos de SVM y KNN se usa el toolbox de reconocimiento de patrones prtools® 6. Laentrada en ambos casos es el vector de características, para SVM se utilizó un kernel polinomial paradeterminar los hiperplanos de clasi�cación. Y en el caso de KNN, se encuentran las similaridades,tomando cuatro vecinos cercanos. La respuesta obtenida es el valor del ACC para cada clasi�cador.
6http://www.prtools.org
55

5. RESULTADOS Y DISCUSIONES
Luego de estandarizar la prueba física para registrar las señales EMG y los ángulos de los movi-mientos de la rodilla, se tomaron previa valoración de un profesional en rehabilitación las muestras enla Universidad Militar Nueva Granada7 y en Tecnoparque SENA nodo Manizales8, con la supervisiónde un profesional en rehabilitación.
En total se tomaron muestras a 11 sujetos con algún tipo de patología en rodilla, y también seregistraron las muestras al mismo número de pacientes (grupo de control) con normalidad en la rodilla.Este último grupo nunca había sido operado de la rodilla y no reportó ningún tipo de dolor o molestiafrecuente en ella. Para ambos grupos se cumplieron los criterios de exclusión e inclusión de�nidos parala prueba física.
5.1. Toma de muestras a sujetos de prueba y valores antropomór�cos
Medidas antropomór�cas sujetos de prueba con patología de rodilla (anormales) y nor-males (grupo de control) Luego de leer y aceptar el formato de consentimiento (ANEXO 1), acada sujeto de prueba se le tomaron las medidas antropomór�cas y se le registró el número de cédulapara la identi�cación, la fecha de nacimiento para determinar su mayoría de edad y el tipo de patologíaque sufrían en la rodilla.
El Cuadro 11 muestra el formato diligenciado para cada sujeto:
Cédula Fecha denacimiento
Fecha demuestreo
Nombredel archivo
# muestras
xxxxxxxxx 27/07/1991 27/04/2013Medida
trocantéreatibial-lateral
(cm)
Medida Tibialmedial-Maleolarmedial (cm)
MusloMedial(cm)
Muslo(cm)
Pantorrilla(cm)
Estatura(cm)
49 40 53 59 38 180Patología y observaciones: Lesión de menisco pierna derecha
Cuadro 11: Formato de medidas iniciales en la prueba física
7Bogotá. Carrera 11 No. 101-80. Conmutador: 6500000-6343200. Contacto: [email protected]. Kilometro 10 via Magdalena. Teléfono: 8741451. Contacto: [email protected]
56
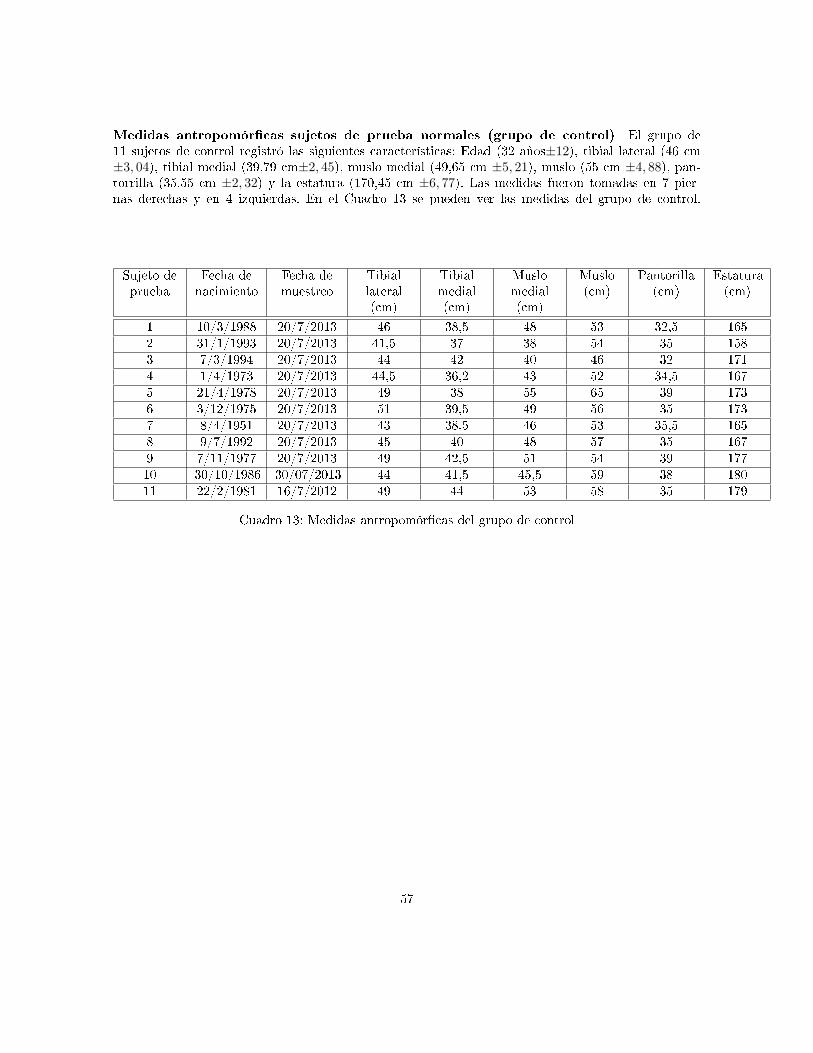
Medidas antropomór�cas sujetos de prueba normales (grupo de control) El grupo de11 sujetos de control registró las siguientes características: Edad (32 años±12), tibial lateral (46 cm±3, 04), tibial medial (39,79 cm±2, 45), muslo medial (49,65 cm ±5, 21), muslo (55 cm ±4, 88), pan-torrilla (35,55 cm ±2, 32) y la estatura (170,45 cm ±6, 77). Las medidas fueron tomadas en 7 pier-nas derechas y en 4 izquierdas. En el Cuadro 13 se pueden ver las medidas del grupo de control.
Sujeto deprueba
Fecha denacimiento
Fecha demuestreo
Tibiallateral(cm)
Tibialmedial(cm)
Muslomedial(cm)
Muslo(cm)
Pantorilla(cm)
Estatura(cm)
1 10/3/1988 20/7/2013 46 38,5 48 53 32,5 1652 31/1/1993 20/7/2013 41,5 37 38 54 35 1583 7/3/1994 20/7/2013 44 42 40 46 32 1714 1/4/1973 20/7/2013 44,5 36,2 43 52 34,5 1675 21/4/1978 20/7/2013 49 38 55 65 39 1736 3/12/1975 20/7/2013 51 39,5 49 56 35 1737 8/4/1951 20/7/2013 43 38,5 46 53 35,5 1658 9/7/1992 20/7/2013 45 40 48 57 35 1679 7/11/1977 20/7/2013 49 42,5 51 54 39 17710 30/10/1986 30/07/2013 44 41,5 45,5 59 38 18011 22/2/1981 16/7/2012 49 44 53 58 35 179
Cuadro 13: Medidas antropomór�cas del grupo de control
57
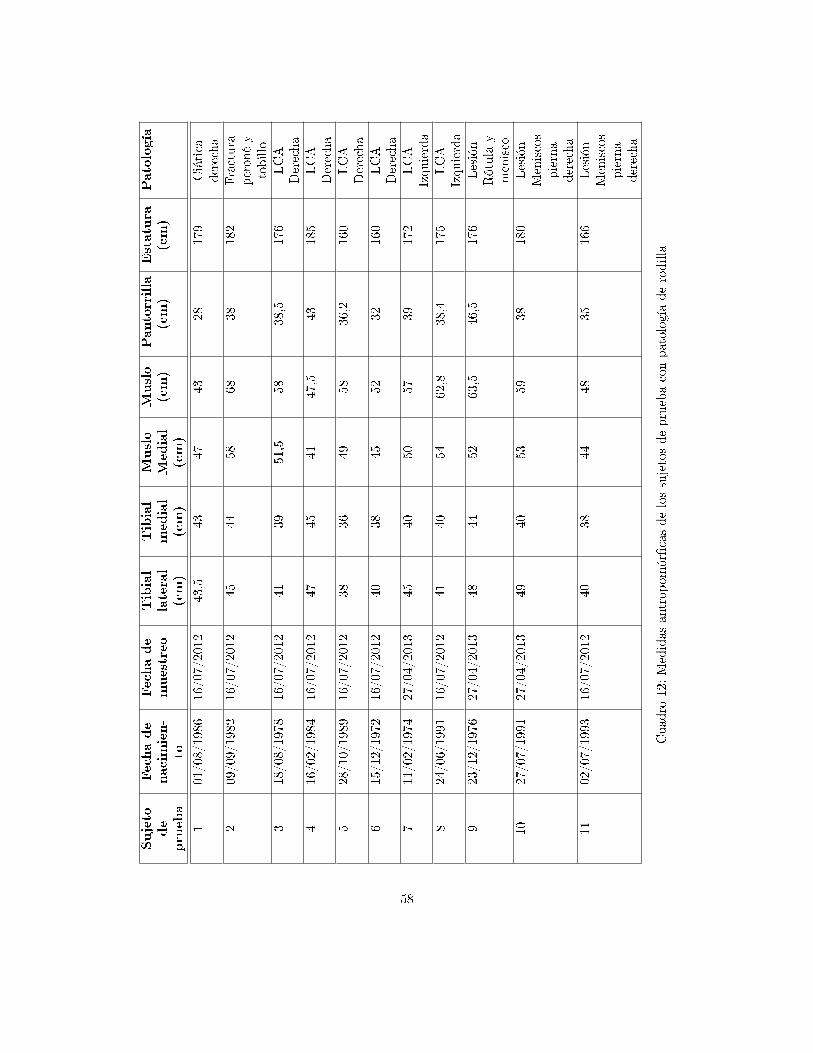
Sujeto
de
prueba
Fechade
nacim
ien-
to
Fechade
muestreo
Tibial
lateral
(cm)
Tibial
medial
(cm)
Muslo
Medial
(cm)
Muslo
(cm)
Pantorrilla
(cm)
Estatura
(cm)
Patología
101/08/1986
16/07/2012
43,5
4347
4328
179
Ciática
derecha
209/09/1982
16/07/2012
4544
5868
38182
Fractura
peronéy
tobillo
318/08/1978
16/07/2012
4139
51,5
5838,5
176
LCA
Derecha
416/02/1984
16/07/2012
4745
4147,5
43185
LCA
Derecha
528/10/1989
16/07/2012
3836
4958
36,2
160
LCA
Derecha
615/12/1972
16/07/2012
4038
4552
32160
LCA
Derecha
711/02/1974
27/04/2013
4540
5057
39172
LCA
Izquierda
824/06/1991
16/07/2012
4140
5462,8
38,4
175
LCA
Izquierda
923/12/1976
27/04/2013
4844
5263,5
46,5
176
Lesión
Rótulay
menisco
1027/07/1991
27/04/2013
4940
5359
38180
Lesión
Meniscos
pierna
derecha
1102/07/1993
16/07/2012
4038
4448
35166
Lesión
Meniscos
pierna
derecha
Cuadro12:Medidas
antropom
ór�cas
delossujetosde
prueba
conpatologíade
rodilla
58

Toma de muestras Luego de tener las medidas iniciales, le �jaron los electrodos de medida super-�cial a cada sujeto en la pierna afectada por alguna patología en los 4 músculos (recto femoral, vastomedial, bíceps femoral y semitendinoso). Además, se �jó el goniómetro, que permite medir los ángulosde los movimientos de la rodilla en el plano sagital. Para el caso de los sujetos sin afectación en larodilla se les solicitó que escogieran la pierna que someterían a la prueba física. Para la primera tomade muestras en la ciudad de Bogotá se tuvo el acompañamiento de la �sioterapeuta Martha MariaArevalo Calixto y para la segunda toma de muestras en la ciudad de Manizales estuvo presente la�sioterapeuta Luz Dary Rodriguez Sotelo.
Figura 21: Ubicación de los electrodos super�ciales para la prueba física
En la Figura 22 se puede observar la ubicación del goniómetro.
Figura 22: Ubicación del goniómetro para la prueba física
59

5.2. Prueba Física
Como se describió en 4.1.3 se realizaron 3 test musculares (4 veces por paciente). La duración dela prueba física por paciente es de 20 minutos aproximadamente.
5.2.1. Señales EMG en pierna para movimiento en cadena cinemática abierta simple(�exión sentado)
Figura 23: Cadena Cinemática Abierta (Flexión sentado)
La Figura 24 muestra el resultado inicial dado por el equipo de instrumentación usado en el mismosujeto de prueba:
Figura 24: Señales adquiridas para Cadena Cinemática Abierta (Flexión sentado)
60

5.2.2. Señales EMG en pierna para movimiento en cadena cinemática abierta simple(Erguido)
Figura 25: Cadena Cinemática Abierta Simple (Erguido)
La Figura 26 muestra el resultado dado por el equipo de instrumentación en el test muscular decadena cinemática abierta (erguido):
Figura 26: Señales adquiridas para Cadena Cinemática Abierta Simple (Erguido)
61
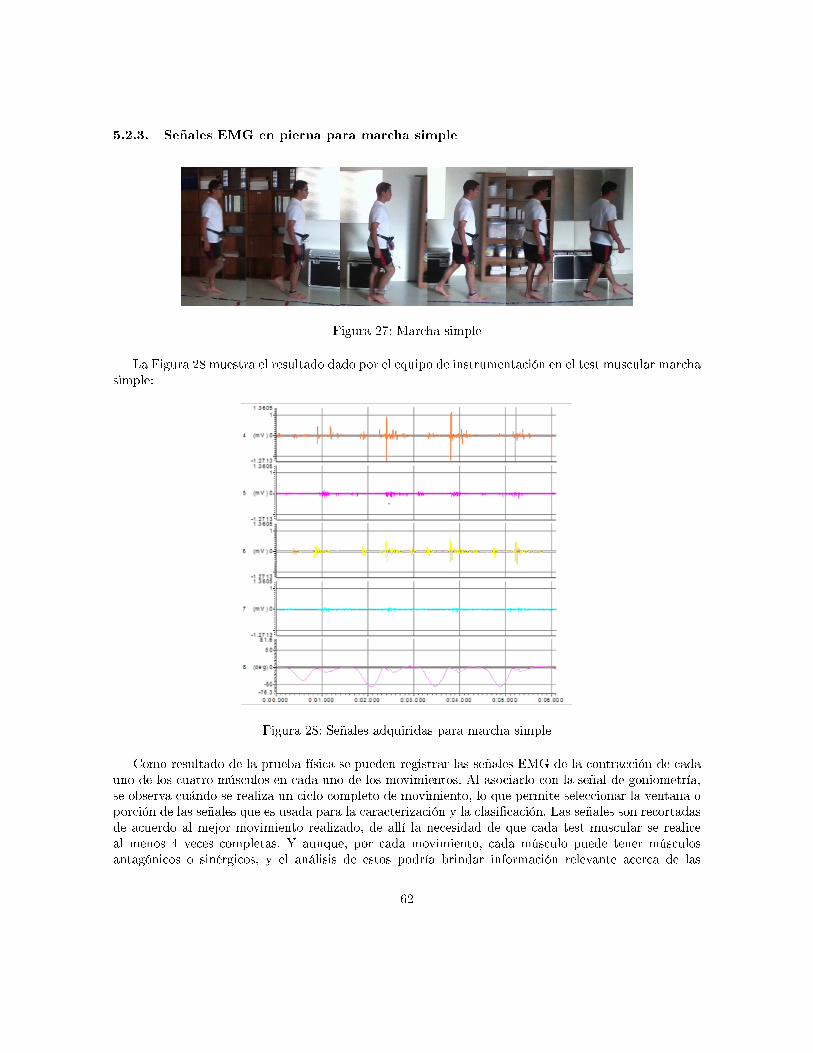
5.2.3. Señales EMG en pierna para marcha simple
Figura 27: Marcha simple
La Figura 28 muestra el resultado dado por el equipo de instrumentación en el test muscular marchasimple:
Figura 28: Señales adquiridas para marcha simple
Como resultado de la prueba física se pueden registrar las señales EMG de la contracción de cadauno de los cuatro músculos en cada uno de los movimientos. Al asociarlo con la señal de goniometría,se observa cuándo se realiza un ciclo completo de movimiento, lo que permite seleccionar la ventana oporción de las señales que es usada para la caracterización y la clasi�cación. Las señales son recortadasde acuerdo al mejor movimiento realizado, de allí la necesidad de que cada test muscular se realiceal menos 4 veces completas. Y aunque, por cada movimiento, cada músculo puede tener músculosantagónicos o sinérgicos, y el análisis de estos podría brindar información relevante acerca de las
62
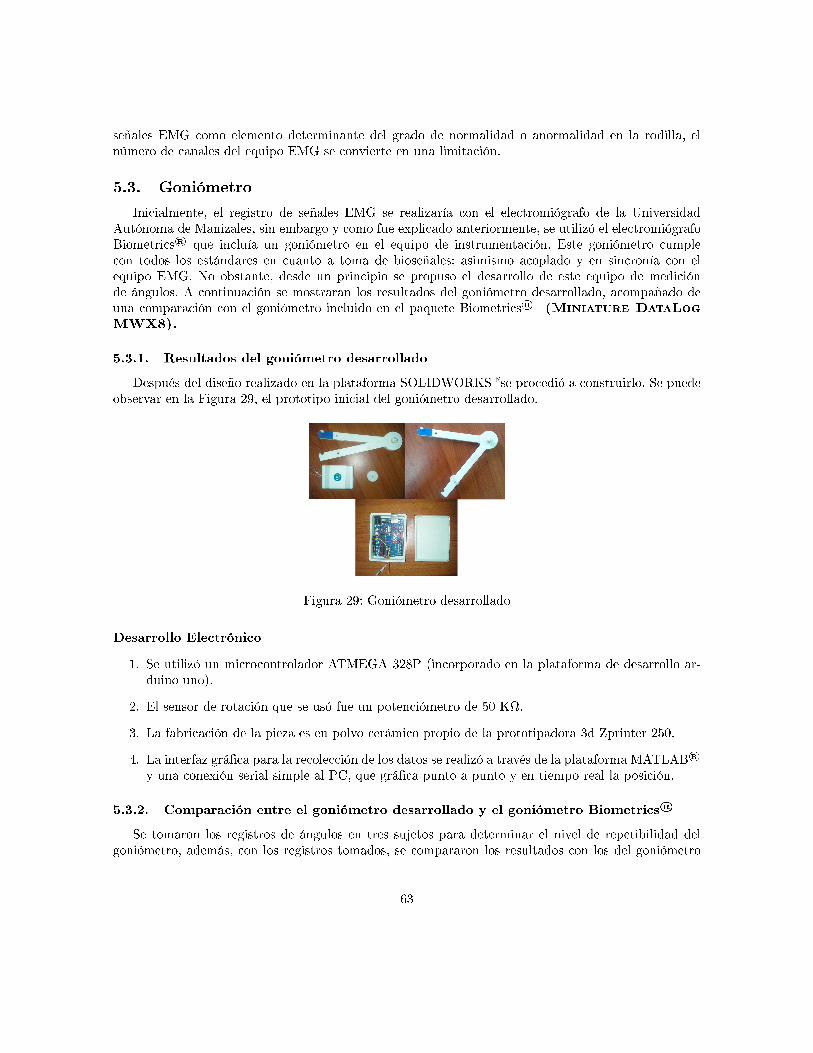
señales EMG como elemento determinante del grado de normalidad o anormalidad en la rodilla, elnúmero de canales del equipo EMG se convierte en una limitación.
5.3. Goniómetro
Inicialmente, el registro de señales EMG se realizaría con el electromiógrafo de la UniversidadAutónoma de Manizales, sin embargo y como fue explicado anteriormente, se utilizó el electromiógrafoBiometrics® que incluía un goniómetro en el equipo de instrumentación. Este goniómetro cumplecon todos los estándares en cuanto a toma de bioseñales; asimismo acoplado y en sincronía con elequipo EMG. No obstante, desde un principio se propuso el desarrollo de este equipo de mediciónde ángulos. A continuación se mostraran los resultados del goniómetro desarrollado, acompañado deuna comparación con el goniómetro incluido en el paquete Biometrics® (Miniature DataLogMWX8).
5.3.1. Resultados del goniómetro desarrollado
Después del diseño realizado en la plataforma SOLIDWORKS�se procedió a construirlo. Se puedeobservar en la Figura 29, el prototipo inicial del goniómetro desarrollado.
Figura 29: Goniómetro desarrollado
Desarrollo Electrónico
1. Se utilizó un microcontrolador ATMEGA 328P (incorporado en la plataforma de desarrollo ar-duino uno).
2. El sensor de rotación que se usó fue un potenciómetro de 50 KW.
3. La fabricación de la pieza es en polvo cerámico propio de la prototipadora 3d Zprinter 250.
4. La interfaz grá�ca para la recolección de los datos se realizó a través de la plataforma MATLAB®
y una conexión serial simple al PC, que grá�ca punto a punto y en tiempo real la posición.
5.3.2. Comparación entre el goniómetro desarrollado y el goniómetro Biometrics®
Se tomaron los registros de ángulos en tres sujetos para determinar el nivel de repetibilidad delgoniómetro, además, con los registros tomados, se compararon los resultados con los del goniómetro
63

usado en la segunda fase. Se puede observar en la Figura 30 las pruebas realizadas al goniómetrodesarrollado.
Figura 30: Pruebas con el goniómetro desarrollado
Como se puede observar en la Figura 31 se hicieron las mismas pruebas para el goniómetro usadoen la segunda toma de muestras.
Figura 31: Pruebas con el goniómetro Biometrics®
Linealización del goniómetro desarrollado Debido al comportamiento no lineal del dispositivode medida, se hacen dos calibraciones de ajuste del sistema con un sistema de referencia calibrado yhomologado. La linealización se realiza a partir de las medidas de la lectura análoga del goniómetro
64
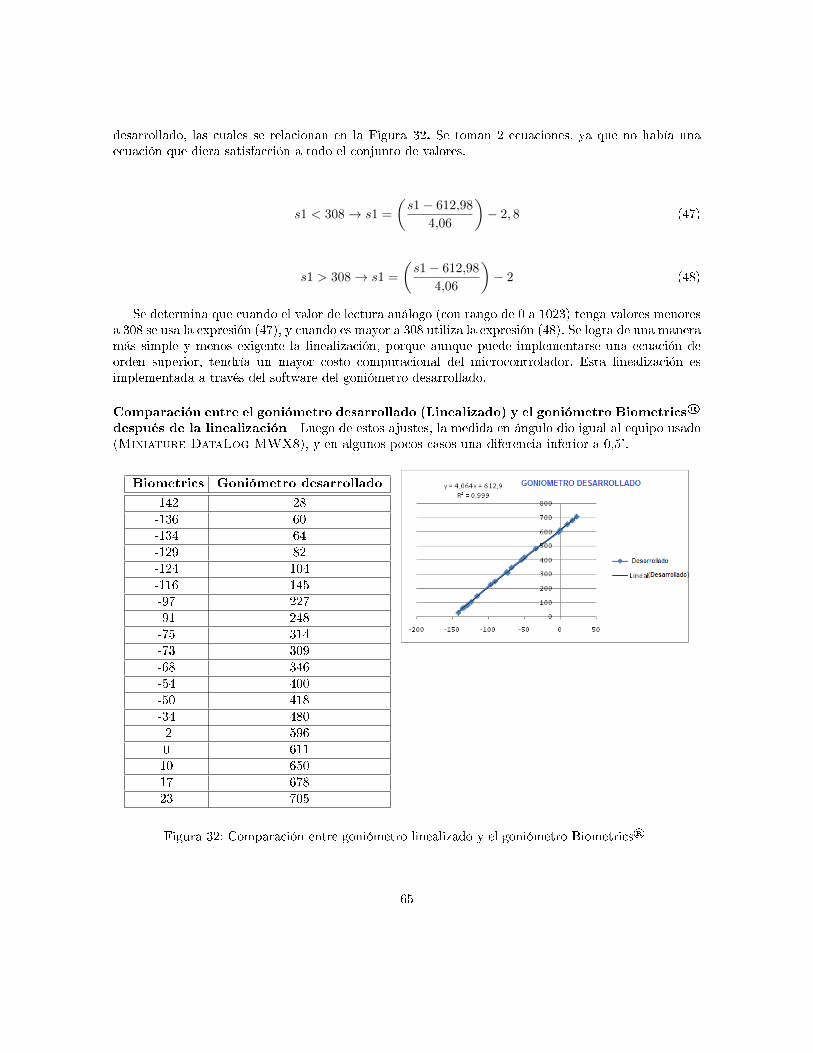
desarrollado, las cuales se relacionan en la Figura 32. Se toman 2 ecuaciones, ya que no había unaecuación que diera satisfacción a todo el conjunto de valores.
s1 < 308→ s1 =
(s1− 612,98
4,06
)− 2, 8 (47)
s1 > 308→ s1 =
(s1− 612,98
4,06
)− 2 (48)
Se determina que cuando el valor de lectura análogo (con rango de 0 a 1023) tenga valores menoresa 308 se usa la expresión (47), y cuando es mayor a 308 utiliza la expresión (48). Se logra de una maneramás simple y menos exigente la linealización, porque aunque puede implementarse una ecuación deorden superior, tendría un mayor costo computacional del microcontrolador. Esta linealización esimplementada a través del software del goniómetro desarrollado.
Comparación entre el goniómetro desarrollado (Linealizado) y el goniómetro Biometrics®
después de la linealización Luego de estos ajustes, la medida en ángulo dio igual al equipo usado(Miniature DataLog MWX8), y en algunos pocos casos una diferencia inferior a 0,5°.
Biometrics Goniómetro desarrollado
-142 28-136 60-134 64-129 82-124 104-116 145-97 227-91 248-75 314-73 309-68 346-54 400-50 418-34 480-2 5960 61110 65017 67823 705
Figura 32: Comparación entre goniómetro linealizado y el goniómetro Biometrics®
65
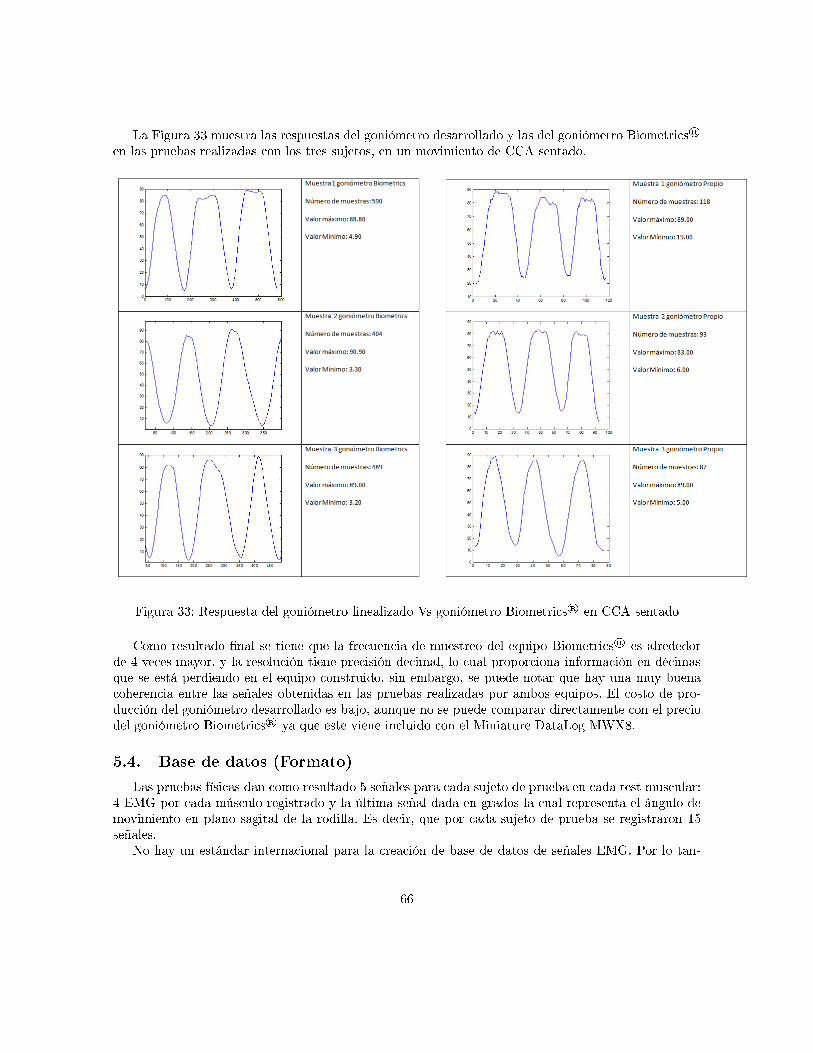
La Figura 33 muestra las respuestas del goniómetro desarrollado y las del goniómetro Biometrics®
en las pruebas realizadas con los tres sujetos, en un movimiento de CCA sentado.
Figura 33: Respuesta del goniómetro linealizado Vs goniómetro Biometrics® en CCA sentado
Como resultado �nal se tiene que la frecuencia de muestreo del equipo Biometrics® es alrededorde 4 veces mayor, y la resolución tiene precisión decimal, lo cual proporciona información en décimasque se está perdiendo en el equipo construido, sin embargo, se puede notar que hay una muy buenacoherencia entre las señales obtenidas en las pruebas realizadas por ambos equipos. El costo de pro-ducción del goniómetro desarrollado es bajo, aunque no se puede comparar directamente con el preciodel goniómetro Biometrics® ya que este viene incluido con el Miniature DataLog MWX8.
5.4. Base de datos (Formato)
Las pruebas físicas dan como resultado 5 señales para cada sujeto de prueba en cada test muscular:4 EMG por cada músculo registrado y la última señal dada en grados la cual representa el ángulo demovimiento en plano sagital de la rodilla. Es decir, que por cada sujeto de prueba se registraron 15señales.
No hay un estándar internacional para la creación de base de datos de señales EMG. Por lo tan-
66
to, basados en la presentación de señales usado en PhysioNet [163] una de las bases de datos másreconocidas en señales electro�siológicas, y del repositorio internacional (machine learning) de la UCI-University of California Irvine- [164] se adopta el siguiente formato �Base de datos EMG� donde seexplica :
1. Título Base de datos EMG: Se describe el número de muestras, equipo de instrumentación.
2. Fuentes: Sitios y fechas donde se realizaron las tomas de muestras.
3. Información de la base de datos:
a) Protocolo: Descripción general de la prueba física.
b) Instrumentación: Descripción general del equipo de instrumentación.
c) Con�guración de los datos: Número de electrodos y número de repeticiones por cadamovimiento en la prueba física.
4. Atributos de la información: Presentación de los datos, número de muestras, número decanales, unidad de medida.
5. Número de clases: La base de datos contiene 22 muestras 11 normales y 11 con alguna patologíade rodilla, cada uno de los sujetos tiene 3 tomas de muestras, por cada test muscular: sentado,pie y otro en marcha.
6. Otros: Explicación de cada archivo contenido en la base de datos.
La base de datos incluye el documento �Base de datos EMG�, 4 carpetas: A_LOG, A_TXT, N_LOGY N_TXT . La carpeta _log contiene datos en formato .log que pueden ser cargados y analizadosa través del software datalog de la empresa Biometrics® . La carpeta _txt contiene los datos de lasseñales EMG en columnas y con sus encabezados- A corresponde a las señales anormales y N a lasnormales-. La base de datos completa con las señales adquiridas para todos los sujetos de pruebase adjunta como entregables digital. La base de datos contiene la información original (sin �ltrado,normalización, ni recorte de las señales). La base de datos fue donada a la UCI y publicada con elformato descrito [164]. Esta base de datos puede servir como insumo para investigaciones posteriores,sea para la rehabilitación o investigación en la rodilla y para el análisis de señales EMG 9.
5.5. Resultados de los registros de goniometría, velocidad y aceleración
Usando los parámetros de desplazamiento, velocidad y aceleración se muestran los siguientes cua-dros donde se pueden observar la media, varianza, máximo y mínimo de los ángulos de desplazamientoen los tres test musculares para las tres clases.
Es importante aclarar que en el Cuadro 14 no se realizó ninguna normalización. Se puede ver quelos máximos, mínimos y medias son similares entre las tres clases y con ellos no se puede observarninguna diferencia relevante que sirva para la clasi�cación. Por lo anterior se puede determinar quesólo con el análisis de los registros de goniometría se hace inadecuada la identi�cación de grados denormalidad o anormalidad en la rodilla por su alta varianza.
9http://archive.ics.uci.edu/ml/datasets/EMG+dataset+in+Lower+Limb
67

Cuadro 14: Consolidado ángulos de desplazamiento (Sentado)
Cuadro 15: Consolidado ángulos de desplazamiento (Marcha)
Para el caso de marcha aunque se tiene una varianza menor con respecto a los otros test musculares,la similitud entre los valores de las clases di�culta la separabilidad de las características.
68

Cuadro 16: Consolidado ángulos de desplazamiento (Pie)
Para el caso del test muscular de pie, la alta varianza entre las clases hace que sea muy difícildeterminar alguna diferencia relevante entre las clases. También puede notarse que los desplazamientosentre las clases son bastante similares. Se puede notar el desplazamiento no tiene grandes cambios entrelas diferentes clases.
5.6. Clasi�cación de las características en las 3 clases
Se presentan a continuación los resultados de la matriz de confusión de los clasi�cadores lineales yno lineales para los tres test musculares
5.6.1. Marcha
Cuadro 17: Matriz de resultados de los clasi�cadores lineales (Marcha)
Es importante anotar que todas las características usadas en los clasi�cadores están normalizadas,incluyendo las características de goniometría. En el Cuadro 17 se observa el valor del ACC para cadacombinación de músculos con y sin goniometría, obtenida a partir de las matrices de confusión paraPCA-LDA y para el k-means. El algoritmo de agrupamiento k-means no brinda información relevante
69

en ninguno de los resultados obtenidos para este test muscular con o sin incluir las características degoniometría, ya que en todos los casos estuvo por debajo de un 0,5 en el valor del ACC. En PCA-LDAse tiene además del valor ACC, las iteraciones, que representan el número de componentes principalesque se requieren para superar el umbral del 80%. Se perciben pequeños aportes de las características degoniometría. También es posible inferir que el bajo número de iteraciones que requirió la comparaciónde los músculos Cru1M (Rectofemoral y semitendinoso) se deba a su antagonismo en un movimientode extensión como es el requerido en la marcha. Sin embargo, el mejor ACC es la relación entre losmúsculos Vasto Medial y Semitendinoso (IntM_G), debido a su continuo aporte al movimiento de�exión-extensión.
En el Cuadro 18 se presentan los resultados del uso de los clasi�cadores no lineales.
Cuadro 18: Matriz de resultados de los clasi�cadores no lineales (Marcha)
Los KNN muestran una homogeneidad y una baja tasa de acierto para marcha y denota ser unalgoritmo no óptimo para esta clasi�cación. Se probaron con diferentes cantidades; de 2 hasta 8 vecinoscercanos, donde el mejor se obtuvo en 4. SVM evidencia la separabilidad total de las 3 clases, para esteclasi�cador se uso un kernel polinómico y se probaron diversos órdenes. Es su�ciente con un polinomiode orden 2; el cual se usa para toda la prueba física en cada test muscular. Para las ANN se obtuvo elpromedio de los valores ACC de 5 entrenamientos mostrado en la tabla como �promedio (5)� y el mejorde estos 5 entrenamientos llamado �mejor ACC�. Se puede observar en el cuadro 18 que los promediostienen mejoras cuando se le agregan los componentes de goniometría. Sin embargo, no sucede lo mismocon los mejores ACC, donde se advierten mejoras en unos casos y en otros no, debido al cambio depesos en el entrenamiento. Se determina también, que ANN entrega altos niveles de ACC, con lo cualse puede a�rmar para este estudio que el clasi�cador es e�ciente en términos de tiempo y consumocomputacional, ofreciendo información su�ciente de la relación que se tiene entre EMG y goniometríapara el test muscular en marcha. Por último, se advierte que el mejor ACC observable en este caso esde IntM_G, que corresponde a los músculos Vasto Medial y Semitendinoso, que como fue explicadoanteriormente, se debe a su continuo aporte al movimiento de �exión-extensión.
5.6.2. Sentado
En el Cuadro 19 se observa el valor del ACC para cada combinación de músculos con y sin goniome-tría, obtenida a partir de las matrices de confusión para PCA-LDA y para el algoritmo de agrupamiento
70
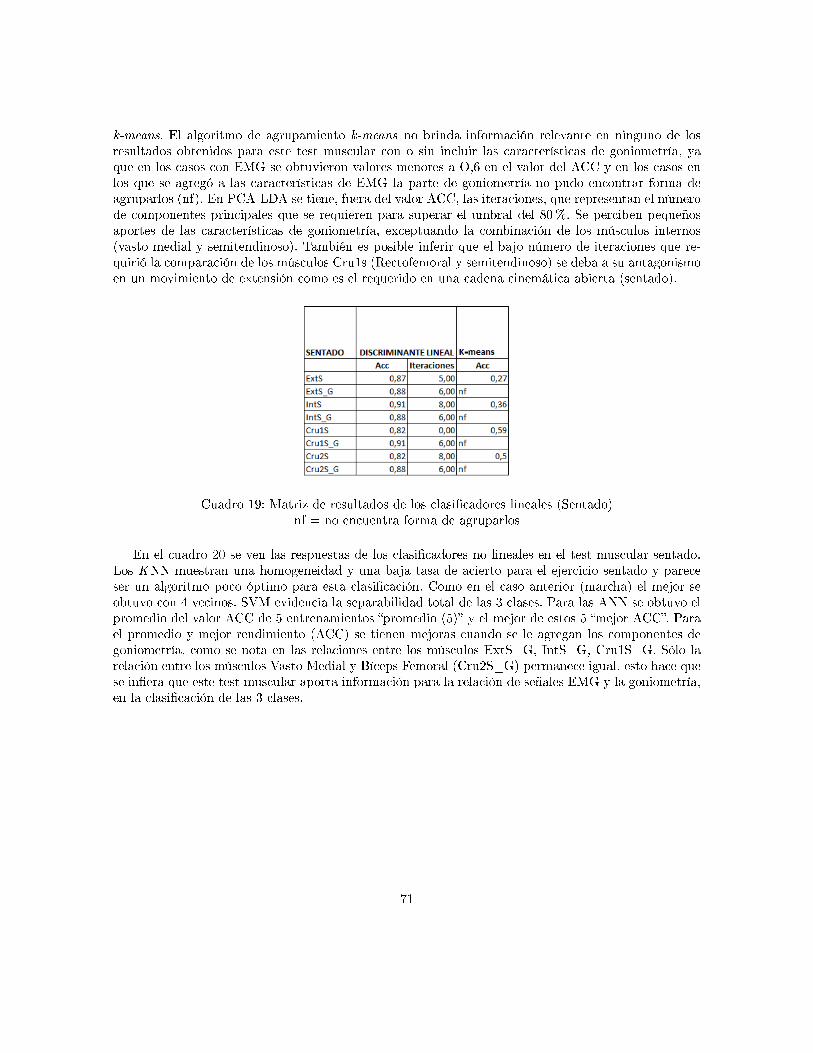
k-means. El algoritmo de agrupamiento k-means no brinda información relevante en ninguno de losresultados obtenidos para este test muscular con o sin incluir las características de goniometría, yaque en los casos con EMG se obtuvieron valores menores a O,6 en el valor del ACC y en los casos enlos que se agregó a las características de EMG la parte de goniometría no pudo encontrar forma deagruparlos (nf). En PCA-LDA se tiene, fuera del valor ACC, las iteraciones, que representan el númerode componentes principales que se requieren para superar el umbral del 80%. Se perciben pequeñosaportes de las características de goniometría, exceptuando la combinación de los músculos internos(vasto medial y semitendinoso). También es posible inferir que el bajo número de iteraciones que re-quirió la comparación de los músculos Cru1s (Rectofemoral y semitendinoso) se deba a su antagonismoen un movimiento de extensión como es el requerido en una cadena cinemática abierta (sentado).
Cuadro 19: Matriz de resultados de los clasi�cadores lineales (Sentado)nf = no encuentra forma de agruparlos
En el cuadro 20 se ven las respuestas de los clasi�cadores no lineales en el test muscular sentado.Los KNN muestran una homogeneidad y una baja tasa de acierto para el ejercicio sentado y pareceser un algoritmo poco óptimo para esta clasi�cación. Como en el caso anterior (marcha) el mejor seobtuvo con 4 vecinos. SVM evidencia la separabilidad total de las 3 clases. Para las ANN se obtuvo elpromedio del valor ACC de 5 entrenamientos �promedio (5)� y el mejor de estos 5 �mejor ACC�. Parael promedio y mejor rendimiento (ACC) se tienen mejoras cuando se le agregan los componentes degoniometría, como se nota en las relaciones entre los músculos ExtS_G, IntS_G, Cru1S_G. Sólo larelación entre los músculos Vasto Medial y Bíceps Femoral (Cru2S_G) permanece igual, esto hace quese in�era que este test muscular aporta información para la relación de señales EMG y la goniometría,en la clasi�cación de las 3 clases.
71
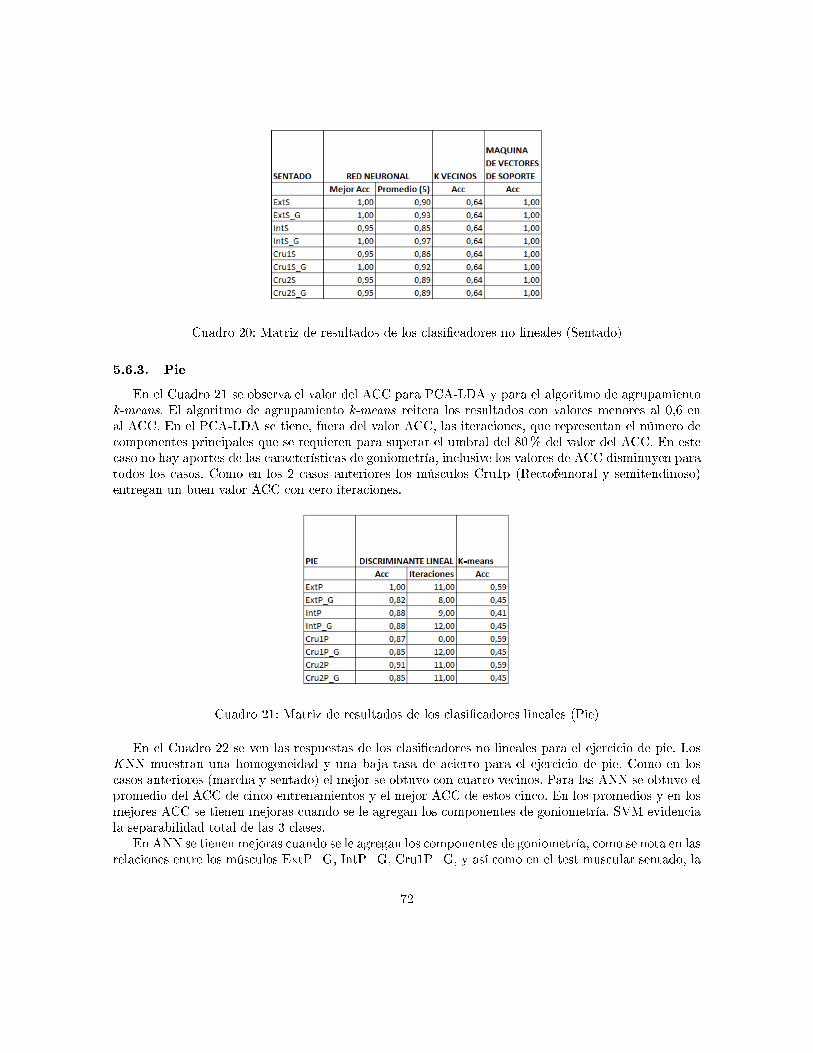
Cuadro 20: Matriz de resultados de los clasi�cadores no lineales (Sentado)
5.6.3. Pie
En el Cuadro 21 se observa el valor del ACC para PCA-LDA y para el algoritmo de agrupamientok-means. El algoritmo de agrupamiento k-means reitera los resultados con valores menores al 0,6 enal ACC. En el PCA-LDA se tiene, fuera del valor ACC, las iteraciones, que representan el número decomponentes principales que se requieren para superar el umbral del 80% del valor del ACC. En estecaso no hay aportes de las características de goniometría, inclusive los valores de ACC disminuyen paratodos los casos. Como en los 2 casos anteriores los músculos Cru1p (Rectofemoral y semitendinoso)entregan un buen valor ACC con cero iteraciones.
Cuadro 21: Matriz de resultados de los clasi�cadores lineales (Pie)
En el Cuadro 22 se ven las respuestas de los clasi�cadores no lineales para el ejercicio de pie. LosKNN muestran una homogeneidad y una baja tasa de acierto para el ejercicio de pie. Como en loscasos anteriores (marcha y sentado) el mejor se obtuvo con cuatro vecinos. Para las ANN se obtuvo elpromedio del ACC de cinco entrenamientos y el mejor ACC de estos cinco. En los promedios y en losmejores ACC se tienen mejoras cuando se le agregan los componentes de goniometría. SVM evidenciala separabilidad total de las 3 clases.
En ANN se tienen mejoras cuando se le agregan los componentes de goniometría, como se nota en lasrelaciones entre los músculos ExtP_G, IntP_G, Cru1P_G, y así como en el test muscular sentado, la
72
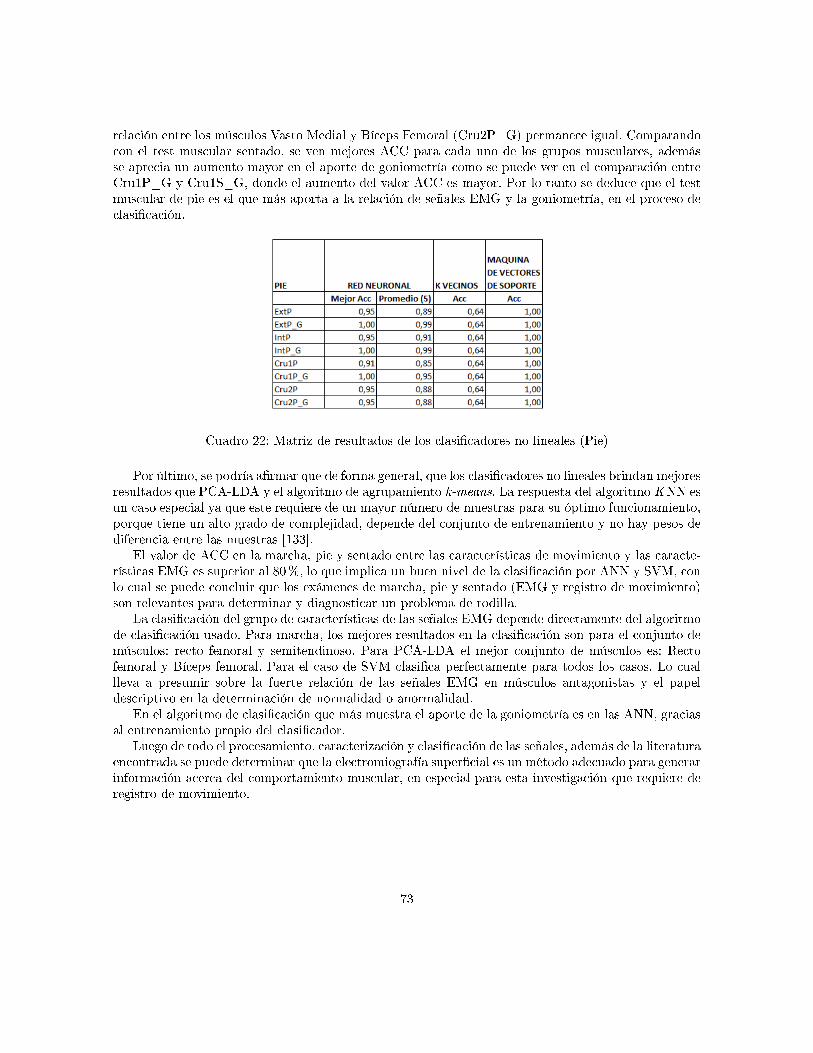
relación entre los músculos Vasto Medial y Bíceps Femoral (Cru2P_G) permanece igual. Comparandocon el test muscular sentado, se ven mejores ACC para cada uno de los grupos musculares, ademásse aprecia un aumento mayor en el aporte de goniometría como se puede ver en el comparación entreCru1P_G y Cru1S_G, donde el aumento del valor ACC es mayor. Por lo tanto se deduce que el testmuscular de pie es el que más aporta a la relación de señales EMG y la goniometría, en el proceso declasi�cación.
Cuadro 22: Matriz de resultados de los clasi�cadores no lineales (Pie)
Por último, se podría a�rmar que de forma general, que los clasi�cadores no lineales brindan mejoresresultados que PCA-LDA y el algoritmo de agrupamiento k-means. La respuesta del algoritmo KNN esun caso especial ya que este requiere de un mayor número de muestras para su óptimo funcionamiento,porque tiene un alto grado de complejidad, depende del conjunto de entrenamiento y no hay pesos dediferencia entre las muestras [133].
El valor de ACC en la marcha, pie y sentado entre las características de movimiento y las caracte-rísticas EMG es superior al 80%, lo que implica un buen nivel de la clasi�cación por ANN y SVM, conlo cual se puede concluir que los exámenes de marcha, pie y sentado (EMG y registro de movimiento)son relevantes para determinar y diagnosticar un problema de rodilla.
La clasi�cación del grupo de características de las señales EMG depende directamente del algoritmode clasi�cación usado. Para marcha, los mejores resultados en la clasi�cación son para el conjunto demúsculos: recto femoral y semitendinoso. Para PCA-LDA el mejor conjunto de músculos es: Rectofemoral y Bíceps femoral. Para el caso de SVM clasi�ca perfectamente para todos los casos. Lo cuallleva a presumir sobre la fuerte relación de las señales EMG en músculos antagonistas y el papeldescriptivo en la determinación de normalidad o anormalidad.
En el algoritmo de clasi�cación que más muestra el aporte de la goniometría es en las ANN, graciasal entrenamiento propio del clasi�cador.
Luego de todo el procesamiento, caracterización y clasi�cación de las señales, además de la literaturaencontrada se puede determinar que la electromiografía super�cial es un método adecuado para generarinformación acerca del comportamiento muscular, en especial para esta investigación que requiere deregistro de movimiento.
73
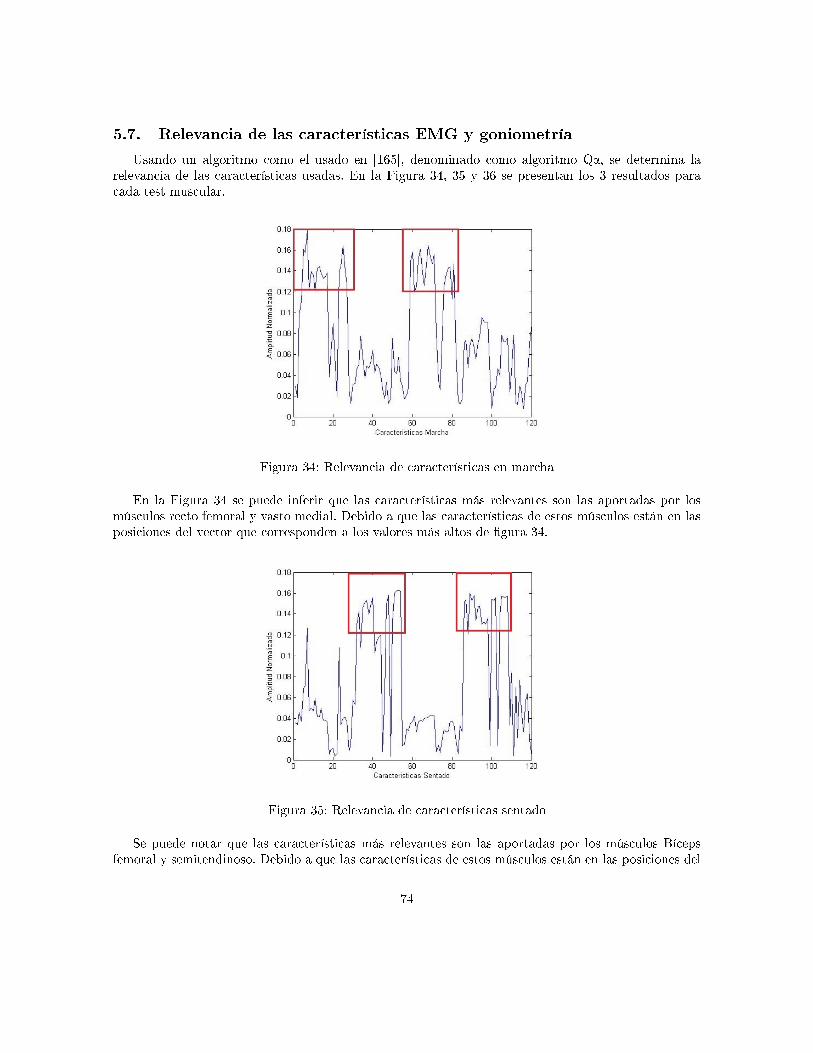
5.7. Relevancia de las características EMG y goniometría
Usando un algoritmo como el usado en [165], denominado como algoritmo Qa, se determina larelevancia de las características usadas. En la Figura 34, 35 y 36 se presentan los 3 resultados paracada test muscular.
Figura 34: Relevancia de características en marcha
En la Figura 34 se puede inferir que las características más relevantes son las aportadas por losmúsculos recto femoral y vasto medial. Debido a que las características de estos músculos están en lasposiciones del vector que corresponden a los valores más altos de �gura 34.
Figura 35: Relevancia de características sentado
Se puede notar que las características más relevantes son las aportadas por los músculos Bícepsfemoral y semitendinoso. Debido a que las características de estos músculos están en las posiciones del
74
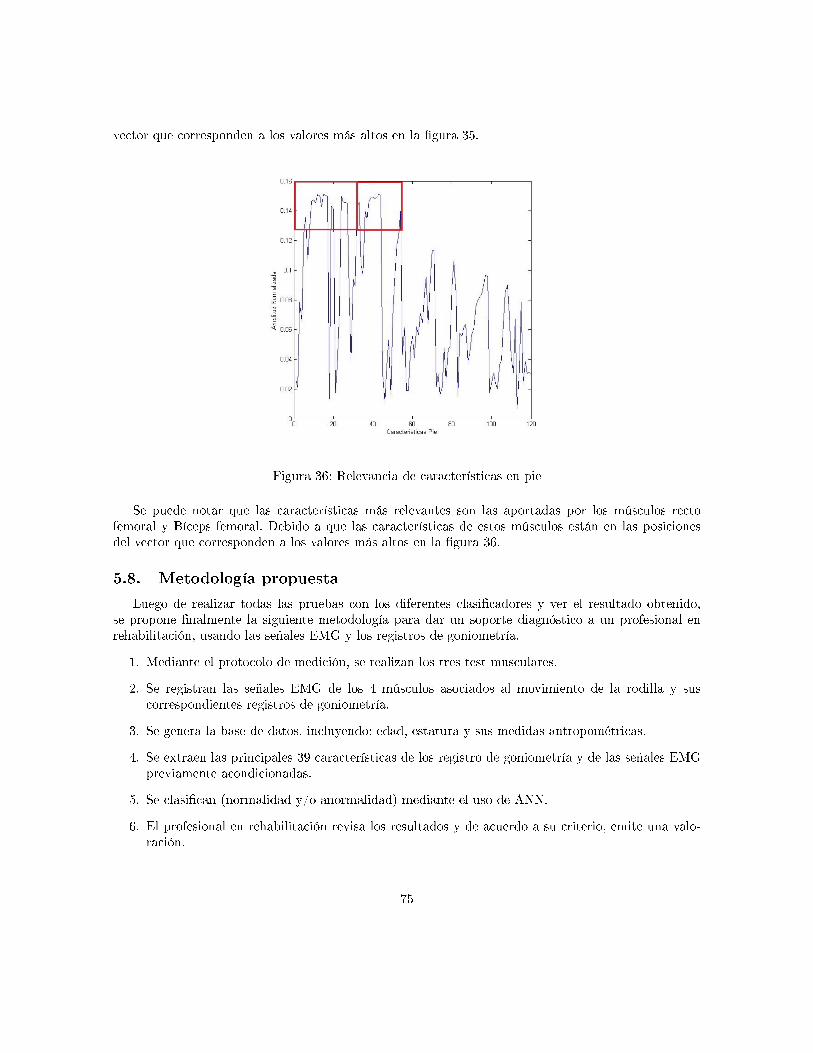
vector que corresponden a los valores más altos en la �gura 35.
Figura 36: Relevancia de características en pie
Se puede notar que las características más relevantes son las aportadas por los músculos rectofemoral y Bíceps femoral. Debido a que las características de estos músculos están en las posicionesdel vector que corresponden a los valores más altos en la �gura 36.
5.8. Metodología propuesta
Luego de realizar todas las pruebas con los diferentes clasi�cadores y ver el resultado obtenido,se propone �nalmente la siguiente metodología para dar un soporte diagnóstico a un profesional enrehabilitación, usando las señales EMG y los registros de goniometría.
1. Mediante el protocolo de medición, se realizan los tres test musculares.
2. Se registran las señales EMG de los 4 músculos asociados al movimiento de la rodilla y suscorrespondientes registros de goniometría.
3. Se genera la base de datos, incluyendo: edad, estatura y sus medidas antropométricas.
4. Se extraen las principales 39 características de los registro de goniometría y de las señales EMGpreviamente acondicionadas.
5. Se clasi�can (normalidad y/o anormalidad) mediante el uso de ANN.
6. El profesional en rehabilitación revisa los resultados y de acuerdo a su criterio, emite una valo-ración.
75

Figura 37: Metodología propuesta
76
6. CONCLUSIONES
Se determinó y estandarizó una prueba física para el registro de las señales EMG y los valores degoniometría. La prueba consta de tres test musculares: marcha, pie y sentado (CCA). La prueba físicase de�nió en la sección 4.1.3, con la cual se obtuvieron las características que se usaron para losdiferentes métodos de clasi�cación.
Se desarrolló un sistema de goniometría para medir los ángulos en �exión-extensión, con un bajocosto en su construcción, cabe acotar que este instrumento no fue utilizado para las pruebas físicas,ya que el equipo de electromiografía usado al �nal, incluía un goniómetro estandarizado y completa-mente compatible. El goniómetro desarrollado demuestra el buen funcionamiento del dispositivo y surepetibilidad, después de las pruebas realizadas sección 5.3.2. Sin embargo, el principal problemaque tendría sería la compatibilidad y sincronización con el equipo EMG, además de su frecuencia demuestreo y resolución.
Se construyó una base de datos con señales EMG a partir de la prueba física estandarizada parasujetos de prueba con normalidad y anormalidad en la rodilla humana.
Se desarrolló un modelo del movimiento de la rodilla, que permitió registrar los valores de posiciónen relación al ángulo de �exión-extensión, su velocidad y aceleración, con el �n de establecer relacionescon las señales EMG.
Se realizó el preprocesamiento de las señales EMG y los correspondientes registros de goniometría.Aunque se realizó un �ltrado de las señales EMG usando un �ltro Chebyshev de segundo orden, nose presentaron cambios signi�cativos en los resultados �nales debido al �ltrado propio del equipo deregistro de las señales. El registro de posición fue suavizado para mejorar los valores de velocidad y ace-leración. Se caracterizaron, las señales EMG y los correspondientes registros de movimiento (posición,velocidad y aceleración) y se obtuvieron 39 características (27 EMG y 12 de los registros de movimien-to). Se tuvieron 21 a partir de la descomposición de Wavelets las cuales aportan datos signi�cativospara el proceso de caracterización. Como se puede observar en la sección 4.4.3.
Se implementó una metodología de clasi�cación no supervisada usando ANN sobre las combinacio-nes musculares, como se muestra en la sección 4.5.1, que permitió discriminar las tres clases usadas,a través de la prueba física estandarizada. Se implementaron diversos clasi�cadores como: KNN, SVM,PCA-LDA y un algoritmo de agrupamiento como el k-means, para comparar y validar los resultadoscon la metodología de clasi�cación con ANN. Los valores de ACC en promedio usando ANN, son ma-yores, sea usando las señales EMG o usando las señales EMG más los registros de goniometría. ANNcon las señales EMG mejora entre un 3% y un 11%, con goniometría mejora entre un 2% y un 14% enlos diferentes test musculares comparado con PCA-LDA, con el algoritmo de agrupamiento k-means, lamejora está entre el 40% y el 69% (señal EMG) y entre el 48% y el 99% (señal EMG con goniometría),y con KNN se denota que ANN presenta mejoras entre el 24% y el 32%.(señal EMG) y entre el 26%y el 35% (señal EMG con goniometría). Se puede concluir que KNN y el algoritmo de agrupamientok-means no manifestaron un rendimiento apropiado en comparación de la ANN debido al bajo númerode muestras (sección 5.6). Se pudo reconocer que el análisis con SVM presenta alta separabilidad degrupos (Cuadros 18, 20 y 22), pero depende directamente del kernel y de las dimensiones escogidas.Su único problema es el coste computacional si la cantidad de muestras fuera más alta.
Se advierte por el análisis de los resultados de los Cuadros 14, 15, 16, más el resultado delalgoritmo Qa (sección 5.7), que la goniometría no aporta componentes relevantes para la mayoría delos algoritmos de clasi�cación, exceptuando la ANN. En donde se nota que los resultados obtenidos enlos procesos de clasi�cación usando ANN son mejores cuando se tienen en cuenta las característicasaportadas por la goniometría que cuando se excluyen, como se puede observar en los Cuadros 18, 20
77
y 22.Por todo lo anterior se puede concluir que, se encontraron elementos que permiten detectar la
relación entre normalidad o anormalidad en la rodilla en sujeto de prueba con un alto porcentaje decon�abilidad. Y que podría servir de soporte diagnóstico a un profesional en rehabilitación.
78

7. RECOMENDACIONES Y TRABAJO FUTURO
Se recomienda un proceso riguroso y bastante estricto en la prueba física para el registro de losángulos en los test musculares. Además, de contar con datos adicionales como medición de fuerzas,peso de los sujetos de prueba, para asociar los resultados con valores dinámicos. También se sugiereampliar el estudio mediante el uso de cargas externas e inferir características adicionales. Aumentar labase de datos con más músculos y tomar los registros en las 2 piernas. Aumentar el número de puntosbiomecánicos de registro de movimiento (tobillo, cadera).
Aunque los resultados que se lograron en esta investigación son bastante prometedores, se requiereun mayor número de sujetos de prueba para tener resultados con mayor nivel de con�abilidad en losalgoritmos de clasi�cación y agrupamiento.
Se propone el uso de sensores y equipo de medición inalámbrico para hacer normal y �uida lainteracción de los movimientos en el momento de la toma de muestras.
Como trabajo futuro se plantea la optimización de los algoritmos y el método de adquisición de lasseñales para la posterior clasi�cación y utilizar este tipo de análisis para implementarlo en otro tipo dearticulaciones. Por último, extender el trabajo a la clasi�cación no sólo de normalidad y anormalidadsino la clasi�cación de las diferentes patologías de rodilla.
Con los primeros resultados se logró tener una Ponencia en el Primer Congreso internacional sobreTecnologías Avanzadas de Mecatrónica, Diseño y Manufactura AMDM con la ponencia �Análisis deseñales EMG para la detección de normalidad o anormalidad en la rodilla�. Evento organizado por laUniversidad Tecnológica de Pereira 2012. Se pretende la publicación de artículos en revistas indexadascon los resultados obtenidos.
79
Referencias
[1] D. Gwinn, J. Wilckens, E. McDevitt, G. Ross, and T. Kao, �The relative incidence of anteriorcruciate ligament injury in men and women at the united states naval academy,� The AmericanJournal of Sports Medicine, vol. 28, no. 1, p. 98, 2000.
[2] M. Majewski, H. Susanne, and S. Klaus, �Epidemiology of athletic knee injuries: A 10-year study,�The Knee, vol. 13, no. 3, pp. 184�188, 2006.
[3] J. Hart, K. Turman, D. Diduch, J. Hart, and M. Miller, �Quadriceps muscle activation and radio-graphic osteoarthritis following acl revision,� Knee Surgery, Sports Traumatology, Arthroscopy,vol. 19, pp. 634�640, 2011.
[4] S. Woo, S. Abramowitch, R. Kilger, and R. Liang, �Biomechanics of knee ligaments: injury,healing, and repair.� Journal of biomechanics, vol. 39, no. 1, p. 1, 2006.
[5] E. Pena, M. Martinez, B. Calvo, D. Palanca, and M. Doblaré, �A �nite element simulation of thee�ect of graft sti�ness and graft tensioning in acl reconstruction,� Clinical Biomechanics, vol. 20,no. 6, pp. 636�644, 2005.
[6] G. Drosos and J. Pozo, �The causes and mechanisms of meniscal injuries in the sporting andnon-sporting environment in an unselected population,� The Knee, vol. 11, no. 2, pp. 143�149,2004.
[7] K. Davda and D. Nathwani, �Traumatic problems of the patella,� Orthopaedics and Trauma,vol. 26, no. 5, pp. 354�361, 2012.
[8] A. R. Salem, A. A. Salem, F. A. Salem, C. T. Uruguay, C. del Uruguay, and E. Ríos, �Tratamientoquirúrgico de la tendinitis rotuliana en atletas de alto rendimiento.�
[9] E. Pages, J. Iborra, E. Moreno, N. Jou, and A. Cuxart, �Evaluación de dos técnicas de reha-bilitación tras la prótesis total de rodilla,� Rehabilitación (Madr), vol. 34, no. 4, pp. 271�275,2000.
[10] M. Davenport, �Knee and leg injuries,� Emergency Medicine Clinics of North America, vol. 28,no. 4, pp. 861�884, 2010.
[11] J. Ramos Alvarez, F. López Silvarrey, J. Segovia Martínez, H. Martínez Melen, and J. Legi-do Arce, �Rehabilitación del paciente con lesión del ligamento cruzado anterior de la rodilla(lca). revisión.� Revista Internacional de Medicina y Ciencias de la Actividad Física y del De-porte, no. 29, p. 4, 2008.
[12] Y. Du, C. Lin, L. Shyu, and T. Chen, �Portable hand motion classi�er for multi-channel surfaceelectromyography recognition using grey relational analysis,� Expert Systems with Applications,vol. 37, no. 6, pp. 4283�4291, 2010.
[13] R. Morales, D. Morales, and V. Grisales, �Caracterizacion de seÑales electromiogra�cas para ladiscriminacion de seis movimientos de la mano,� Scientia Et Technica, no. 42, pp. 278�283, 2009.
80
[14] J. Dideriksen, D. Falla, M. Bækgaard, M. Mogensen, K. Steimle, and D. Farina, �Compari-son between the degree of motor unit short-term synchronization and recurrence quanti�cationanalysis of the surface emg in two human muscles,� Clinical neurophysiology, vol. 120, no. 12,pp. 2086�2092, 2009.
[15] E. Lindeman, F. Spaans, J. Reulen, P. Le�ers, and J. Drukker, �Surface emg of proximal legmuscles in neuromuscular patients and in healthy controls. relations to force and fatigue,� Journalof Electromyography and Kinesiology, vol. 9, no. 5, pp. 299�307, 1999.
[16] M. Akay and C. Mello, �Wavelets for biomedical signal processing,� vol. 6, pp. 2688�2691, 1998.
[17] A. Subasi, M. Yilmaz, and H. Ozcalik, �Classi�cation of emg signals using wavelet neural net-work,� Journal of neuroscience methods, vol. 156, no. 1-2, pp. 360�367, 2006.
[18] J. Karlsson, N. Ostlund, B. Larsson, and B. Gerdle, �An estimation of the in�uence of forcedecrease on the mean power spectral frequency shift of the emg during repetitive maximumdynamic knee extensions.� Journal of electromyography and kinesiology: o�cial journal of theInternational Society of Electrophysiological Kinesiology, vol. 13, no. 5, p. 461, 2003.
[19] S. Nawab, S. Chang, and C. De Luca, �High-yield decomposition of surface emg signals,� ClinicalNeurophysiology, vol. 121, no. 10, pp. 1602�1615, 2010.
[20] S. Rasheed, D. Stashuk, and M. Kamel, �Adaptive fuzzy k-nn classi�er for emg signal decompo-sition,� Medical engineering & physics, vol. 28, no. 7, pp. 694�709, 2006.
[21] Y. Wong and G. Ng, �Surface electrode placement a�ects the emg recordings of the quadricepsmuscles,� Physical Therapy in Sport, vol. 7, no. 3, pp. 122�127, 2006.
[22] L. Zhang and R. Shiavi, �Multi-muscle emg pattern study of anterior cruciate ligament (acl)injured subjects,� pp. 743�744, 2002.
[23] S. Aalbersberg, I. Kingma, L. Blankevoort, and J. van Dieen, �Co-contraction during static anddynamic knee extensions in acl de�cient subjects,� Journal of Electromyography and Kinesiology,vol. 15, no. 4, pp. 349�357, 2005.
[24] S. Schmid, M. Mo�at, and G. Gutierrez, �E�ect of knee joint cooling on the electromyographicactivity of lower extremity muscles during a plyometric exercise,� Journal of Electromyographyand Kinesiology, vol. 20, no. 6, pp. 1075�1081, 2010.
[25] M. Kuchta, L. Iwanejko, M. Szulim, and Z. Sokolowski, �Modelling and dynamics of a knee-joint,�pp. 665�667, 2007.
[26] C. A. Cascão Jr, R. U. Ferreira, E. D. Beckmann, G. A. Borges, J. Y. Ishihara, and A. F.da Rocha, �Estudo e desenvolvimento de uma prótese ativa de perna comandada por sinaiseletromiográ�cos,� in VII Simpósio Brasileiro de Automação Inteligente/II IEEE Latin-AmericanRobotics Symposium, 2005.
[27] H. Zabaleta, M. Bureau, G. Eizmendi, E. Olaiz, J. Medina, and M. Perez, �Exoskeleton design forfunctional rehabilitation in patients with neurological disorders and stroke,� pp. 112�118, 2008.
[28] A. Zoss, H. Kazerooni, and A. Chu, �On the mechanical design of the berkeley lower extremityexoskeleton (bleex),� pp. 3465�3472, 2005.
81
[29] S. Yacoub and K. Raoof, �Power line interference rejection from surface electromyography signalusing an adaptive algorithm,� IRBM, vol. 29, no. 4, pp. 231�238, 2008.
[30] G. Lu, J. Brittain, P. Holland, J. Yianni, A. Green, J. Stein, T. Aziz, and S. Wang, �Removingecg noise from surface emg signals using adaptive �ltering,� Neuroscience letters, vol. 462, no. 1,pp. 14�19, 2009.
[31] V. Dionisio, G. Almeida, M. Duarte, and R. Hirata, �Kinematic, kinetic and emg patterns duringdownward squatting,� Journal of Electromyography and Kinesiology, vol. 18, no. 1, pp. 134�143,2008.
[32] J. Smoliga, J. Myers, M. Redfern, and S. Lephart, �Reliability and precision of emg in leg, torso,and arm muscles during running,� Journal of Electromyography and Kinesiology, vol. 20, no. 1,pp. e1�e9, 2010.
[33] V. Jain, �Design and control of active knee rehabilitation orthotic device (akrod),� Master'sthesis, Northeastern University, 2009.
[34] B. Weinberg, J. Nikitczuk, S. Patel, B. Patritti, C. Mavroidis, P. Bonato, and P. Canavan,�Design, control and human testing of an active knee rehabilitation orthotic device,� pp. 4126�4133, 2007.
[35] M. Chandrapal and X. Chen, �Intelligent active assistive and resistive orthotic device for kneerehabilitation,� pp. 1880�1885, 2010.
[36] K. Low and Y. Yin, �An integrated lower exoskeleton system towards design of a portable activeorthotic device,� International Journal of Robotics and Automation, vol. 22, no. 1, pp. 32�43,2007.
[37] D. Ferris and C. Lewis, �Robotic lower limb exoskeletons using proportional myoelectric control,�vol. 2009, pp. 2119�2124, 2009.
[38] N. Reddy and V. Gupta, �Toward direct biocontrol using surface emg signals: Control of �ngerand wrist joint models,� Medical engineering & physics, vol. 29, no. 3, pp. 398�403, 2007.
[39] C. Doorenbosch and J. Harlaar, �Accuracy of a practicable emg to force model for knee muscles,�Neuroscience letters, vol. 368, no. 1, pp. 78�81, 2004.
[40] H. Onishi, R. Yagi, M. Oyama, K. Akasaka, K. Ihashi, and Y. Handa, �Emg-angle relations-hip of the hamstring muscles during maximum knee �exion,� Journal of Electromyography andKinesiology, vol. 12, no. 5, pp. 399�406, 2002.
[41] M. Milenkovic, E. Jovanov, J. Chapman, D. Raskovic, and J. Price, �An accelerometer-basedphysical rehabilitation system,� pp. 57�60, 2002.
[42] M. Sartori, M. Reggiani, C. Mezzato, and E. Pagello, �A lower limb emg-driven biomechanicalmodel for applications in rehabilitation robotics,� pp. 1�7, 2009.
[43] R. Behnke, Kinetic anatomy. Human Kinetics Publishers, 2006, vol. 1.
[44] L. H. G. García, C. M. R. García, I. G. Fuentes, and N. P. Victoria, �A rticulación de la rodillay su mecánica articular,� MEDISAN, vol. 7, no. 2, pp. 100�109, 2003.
82
[45] A. Maciel, �Modelagem de articulações para humanos virtuais baseada em anatomia,� 2001.
[46] C. UNESCO, �Rehabilitación del paciente con lesión del ligamento cruzado anterior de la rodilla(lca). revisión,� 2008.
[47] J. D. Bronzino, The biomedical engineering handbook. CRC PressI Llc, 2000, vol. 2.
[48] J. Fulkerson and H. Gossling, �Anatomy of the knee joint lateral retinaculum,� Clinical Ortho-paedics and Related Research, vol. 153, p. 183, 1980.
[49] Á. García, C. de las Peñas, and J. Urrialde, Tratamiento �sioterápico de la rodilla. McGraw-HillInteramericana, 2003.
[50] M. Panesso, M. Trillos, and I. Guzmán, �Biomecánica clínica de la rodilla.�
[51] J. Cram, Cram's introduction to surface electromyography. Jones and Bartlett, 2011.
[52] V. Cantarella, Bones and muscles: an illustrated anatomy. Wolf Fly Press/V. Cantarella, 1999.
[53] D. Beckwée, P. Vaes, M. Cnudde, E. Swinnen, and I. Bautmans, �Osteoarthritis of the knee: whydoes exercise work? a qualitative study of the literature.� Ageing research reviews, 2012.
[54] F. Berenbaum, �Osteoarthritis as an in�ammatory disease (osteoarthritis is not osteoarthrosis!),�Osteoarthritis and Cartilage, 2012.
[55] D. Figueroa, R. Calvo, I. E. Villalón, P. Meleán, F. Novoa, and A. Vaisman, �Clinical outcomesafter arthroscopic treatment of knee osteoarthritis,� The Knee, 2012.
[56] F. Guillemin, A. Rat, B. Mazieres, J. Pouchot, B. Fautrel, L. Euller-Ziegler, P. Fardellone, J. Mor-van, C. Roux, E. Verrouil et al., �Prevalence of symptomatic hip and knee osteoarthritis: a two-phase population-based survey,� Osteoarthritis and Cartilage, vol. 19, no. 11, pp. 1314�1322,2011.
[57] S. Muthuri, D. McWilliams, M. Doherty, and W. Zhang, �History of knee injuries and kneeosteoarthritis: a meta-analysis of observational studies,� Osteoarthritis and Cartilage, vol. 19,no. 11, pp. 1286�1293, 2011.
[58] L. Wood, G. Peat, E. Thomas, and R. Duncan, �Knee osteoarthritis in community-dwelling olderadults: are there characteristic patterns of pain location?� Osteoarthritis and cartilage, vol. 15,no. 6, pp. 615�623, 2007.
[59] K. Kawano, S. Kobashi, Y. Tsumori, N. Shibanuma, S. Imawaki, M. Yagi, S. Yoshiya, andY. Hata, �Evaluation of pivot shift in the anterior cruciate ligament-injured knee using inertialand magnetic sensors,� in Automation Congress, 2008. WAC 2008. World. IEEE, 2008, pp. 1�6.
[60] H. Silvers and B. Mandelbaum, �Acl injury prevention in the athlete,� Sport-Orthopädie-Sport-Traumatologie-Sports Orthopaedics and Traumatology, 2011.
[61] L. Weisberg, C. García, and R. Strub, �Diseases of the peripheral nerves and motor neurons,�Essentials of clinical neurology. St Louis: Mosby, pp. 458�494, 1996.
[62] C. Jones, S. Reddy, and C. Benjamin Ma, �Repair of the posterior root of the medial meniscus,�The Knee, vol. 17, no. 1, pp. 77�80, 2010.
83

[63] K. T. Boyd and P. T. Myers, �Meniscus preservation; rationale, repair techniques and results,�The Knee, vol. 10, no. 1, pp. 1�11, 2003.
[64] Y. J. Kim, J. G. Kim, S. H. Chang, J. C. Shim, S. B. Kim, M. Y. Lee et al., �Posterior root tearof the medial meniscus in multiple knee ligament injuries.� The Knee, vol. 17, no. 5, p. 324, 2010.
[65] C. A. Firpo, Manual de Ortopedia Y Traumatologia. Carlos Natalio Firpo, 2010.
[66] O. Martinet, J. Cordey, Y. Harder, A. Maier, M. Bühler, and G. Barraud, �The epidemiology offractures of the distal femur,� Injury, vol. 31, pp. 62�94, 2000.
[67] A. M.-V. Jiménez and M. Z. Lobato, �51.-fracturas de la extremidad proximal de la tibia.�
[68] R. Grütter, J. Cordey, D. Wahl, B. Koller, and P. Regazzoni, �A biomechanical enigma: why aretibial fractures not more frequent in the elderly?� Injury, vol. 31, pp. 72�94, 2000.
[69] R. Grütter, J. Cordey, M. Bühler, R. Johner, and P. Regazzoni, �The epidemiology of diaphysealfractures of the tibia,� Injury, vol. 31, pp. 64�94, 2000.
[70] D. Méndez, �Análisis númerico y de las fuerzas que se involucran en el movimiento de la rodi-lla,� Master's thesis, Instituto Politecnico Nacional. Escuela superior de ingeniería mécanica yeléctrica., 2012.
[71] E. R. Cassemiro, �Metodologia para desenvolvimento de dispositivos biomecânicos para aplicaçãoem próteses antropomór�cas,� Master's thesis, 2002.
[72] K.-M. Lee and J. Guo, �Kinematic and dynamic analysis of an anatomically based knee joint,�Journal of biomechanics, vol. 43, no. 7, pp. 1231�1236, 2010.
[73] J. Enderle and J. Bronzino, Introduction to biomedical engineering. Academic Pr, 2011.
[74] A. Neira, �Avances en la biología molecular de la unión neuromuscular.�
[75] A. Fuglsang-Frederiksen, �The utility of interference pattern analysis,� Muscle & nerve, vol. 23,no. 1, pp. 18�36, 2000.
[76] G. Drost, D. F. Stegeman, B. G. van Engelen, and M. J. Zwarts, �Clinical applications of high-density surface emg: a systematic review,� Journal of Electromyography and Kinesiology, vol. 16,no. 6, pp. 586�602, 2006.
[77] N. Massó i Ortigosa, F. Rey, D. Romero Rodriguez, G. Gual, L. Costa Tutusaus, and A. Germán,�Surface electromyography applications,� Apunts: Medicina de l'esport, vol. 45, no. 166, pp. 121�131, 2009.
[78] B. Yao, S. Salenius, G. Yue, R. Brown, and J. Liu, �E�ects of surface emg recti�cation on powerand coherence analyses: an eeg and meg study,� Journal of neuroscience methods, vol. 159, no. 2,pp. 215�223, 2007.
[79] K. Okura, T. Kato, J. Montplaisir, B. Sessle, and G. Lavigne, �Quantitative analysis of surfaceemg activity of cranial and leg muscles across sleep stages in human,� Clinical neurophysiology,vol. 117, no. 2, pp. 269�278, 2006.
84
[80] J. Guo, Y. Zheng, H. Xie, and X. Chen, �Continuous monitoring of electromyography (emg),mechanomyography (mmg), sonomyography (smg) and torque output during ramp and stepisometric contractions,� Medical engineering & physics, vol. 32, no. 9, pp. 1032�1042, 2010.
[81] D. Staudenmann, J. Potvin, I. Kingma, D. Stegeman, and J. van Dieen, �E�ects of emg processingon biomechanical models of muscle joint systems: sensitivity of trunk muscle moments, spinalforces, and stability,� Journal of biomechanics, vol. 40, no. 4, pp. 900�909, 2007.
[82] C. C. Auchincloss and L. McLean, �The reliability of surface emg recorded from the pelvic �oormuscles,� Journal of neuroscience methods, vol. 182, no. 1, pp. 85�96, 2009.
[83] E. Kamavuako, D. Farina, K. Yoshida, and W. Jensen, �Relationship between grasping force andfeatures of single-channel intramuscular emg signals,� Journal of neuroscience methods, vol. 185,no. 1, pp. 143�150, 2009.
[84] J. Cholewicki, J. van Dieen, A. Lee, and N. Peter Reeves, �A comparison of a maximum exertionmethod and a model-based, sub-maximum exertion method for normalizing trunk emg,� Journalof electromyography and kinesiology, 2011.
[85] C. Byrne, D. O'Kee�e, A. Donnelly, and G. Lyons, �E�ect of walking speed changes on tibialisanterior emg during healthy gait for fes envelope design in drop foot correction,� Journal ofElectromyography and Kinesiology, vol. 17, no. 5, pp. 605�616, 2007.
[86] L. Cohen, �Time-frequency distributions-a review,� Proceedings of the IEEE, vol. 77, no. 7, pp.941�981, 1989.
[87] C. Guerrero, A. Trigueros, and J. Franco, �Time-frequency eeg analysis in epilepsy: What is moresuitable?� in Signal Processing and Information Technology, 2005. Proceedings of the Fifth IEEEInternational Symposium on. IEEE, 2005, pp. 202�207.
[88] S. Mahmoud, Z. Hussain, I. Cosic, and Q. Fang, �Time-frequency analysis of normal and abnormalbiological signals,� Biomedical Signal Processing and Control, vol. 1, no. 1, pp. 33�43, 2006.
[89] A. Papandreou-Suppappola, Applications in time-frequency signal processing. CRC, 2003,vol. 10.
[90] A. Quiceno Manrique et al., �Análisis tiempo-frecuencia por métodos no paramétricos orientado ala detección de patologías en bioseñales.� Ph.D. dissertation, Universidad Nacional de Colombia-Sede Manizales, 2009.
[91] C. Duque Sanchez and M. Morales Pérez, �Caracterización de voz empleando análisis tiempo-frecuencia aplicada al reconocimiento de emociones,� 2007.
[92] B. Boashash, Time frequency signal analysis and processing: a comprehensive reference. ElsevierScience, 2003.
[93] L. Cohen and T. Posch, �Positive time-frequency distribution functions,� Acoustics, Speech andSignal Processing, IEEE Transactions on, vol. 33, no. 1, pp. 31�38, 1985.
[94] F. Hlawatsch and G. Boudreaux-Bartels, �Linear and quadratic time-frequency signal represen-tations,� Signal Processing Magazine, IEEE, vol. 9, no. 2, pp. 21�67, 1992.
85

[95] A. Poularikas, Transforms and applications handbook. CRC, 2009, vol. 43.
[96] A. Papandreou-Suppappola, F. Hlawatsch, and G. Boudreaux-Bartels, �Quadratic time-frequencyrepresentations with scale covariance and generalized time-shift covariance: A uni�ed frameworkfor the a�ne, hyperbolic, and power classes,� Digital Signal Processing, vol. 8, no. 1, pp. 3�48,1998.
[97] L. Cohen, Time-frequency analysis: theory and applications. Prentice-Hall, Inc., 1995.
[98] E. D. Ryan, J. T. Cramer, A. D. Egan, M. J. Hartman, and T. J. Herda, �Time and frequencydomain responses of the mechanomyogram and electromyogram during isometric ramp contrac-tions: a comparison of the short-time fourier and continuous wavelet transforms,� Journal ofElectromyography and Kinesiology, vol. 18, no. 1, pp. 54�67, 2008.
[99] F. Castro, �Metodologia de projeto centrada na casa da qualidade,� Master's thesis, UniversidadeFederal Do Rio Grande Do Sul, 2011.
[100] D. G. S. Marin and J. I. M. Hurtado, �Segmentación y realce de señales de voz usando latransformada wavelet y dsps,� 2004.
[101] F. A. Sepúlveda Sepúlveda et al., �Extracción de parámetros de señales de voz usando técnicasde análisis en tiempo-frecuencia,� Ph.D. dissertation, Universidad Nacional de Colombia-SedeManizales, 2004.
[102] O. J. L. Castro, �Nuevas metodologías no invasivas de diagnosis de defectos incipientes en roda-mientos de bola,� Ph.D. dissertation, Universidad Carlos III de Madrid, 2007.
[103] L. A. Kallenberg and H. J. Hermens, �Behaviour of a surface emg based measure for motorcontrol: Motor unit action potential rate in relation to force and muscle fatigue,� Journal ofElectromyography and Kinesiology, vol. 18, no. 5, pp. 780�788, 2008.
[104] L. A. Kallenberg, S. Preece, C. Nester, and H. J. Hermens, �Reproducibility of muap propertiesin array surface emg recordings of the upper trapezius and sternocleidomastoid muscle,� Journalof Electromyography and Kinesiology, vol. 19, no. 6, pp. e536�e542, 2009.
[105] J. Winslow, M. Dididze, and C. K. Thomas, �Automatic classi�cation of motor unit potentialsin surface emg recorded from thenar muscles paralyzed by spinal cord injury,� Journal of neu-roscience methods, vol. 185, no. 1, pp. 165�177, 2009.
[106] A. Subasi, �Classi�cation of emg signals using combined features and soft computing techniques,�Applied Soft Computing, 2012.
[107] Y. Zhan, D. Halliday, P. Jiang, X. Liu, and J. Feng, �Detecting time dependent coherence betweennon-stationary electrophysiological signals a combined statistical and time frequency approach,�Journal of neuroscience methods, vol. 156, no. 1, pp. 322�332, 2006.
[108] M. Pope, A. Aleksiev, N. Panagiotacopulos, J. Lee, D. Wilder, K. Friesen, W. Stielau, andV. Goel, �Evaluation of low back muscle surface emg signals using wavelets,� Clinical Biomecha-nics, vol. 15, no. 8, pp. 567�573, 2000.
86
[109] J. L. Rodríguez Sotelo et al., �Estudio comparativo de técnicas para extracción de parámetros enseñales de electrocardiografía/comparative study of techniques to features extraction in signals ofelectrocardiography,� Master's thesis, Universidad Nacional de Colombia Sede Manizales, 2004.
[110] S. Ezennaya Gómez, �Segmentación de sonidos cardíacos mediante procesado digital de señal,�2012.
[111] J. Ra�ee, M. Ra�ee, F. Yavari, and M. Schoen, �Feature extraction of forearm emg signals forprosthetics,� Expert Systems with Applications, vol. 38, no. 4, pp. 4058�4067, 2011.
[112] Y. Wang, W. Wu, Q. Zhu, and G. Shen, �Discrete wavelet transfom for nonstationary signalprocessing.�
[113] X. Zhang, Y. Wang, and R. P. Han, �Wavelet transform theory and its application in emg signalprocessing,� in Fuzzy Systems and Knowledge Discovery (FSKD), 2010 Seventh InternationalConference on, vol. 5. IEEE, 2010, pp. 2234�2238.
[114] S. G. Mallat, �A theory for multiresolution signal decomposition: the wavelet representation,�Pattern Analysis and Machine Intelligence, IEEE Transactions on, vol. 11, no. 7, pp. 674�693,1989.
[115] J. Mina and C. Verde, �Detección de fallas usando análisis de componentes principales,� Congresoanual de la AMCA, 2004.
[116] M. I. Pisarello, A. Picaza, and J. E. Carlos-Monzón, �Reducción de datos electrocardiográ�cos apartir del análisis de componentes principales,� 2005.
[117] O. Ramos, G. Calvo, and F. Tommasini, �Modelo acústico de cabeza y torso mediante análisisde componentes principales,� Mecánica Computacional, vol. 26, pp. 46�58, 2007.
[118] J. Shlens, �A tutorial on principal component analysis,� Systems Neurobiology Laboratory, Uni-versity of California at San Diego, vol. 82, 2005.
[119] D. Peña, Análisis de datos multivariantes. McGraw-Hill Madrid, 2002, vol. 24.
[120] I. B. Muñoz, �Arquitectura basada en fpgas para la detección de objetos en movimiento, utili-zando visión computacional y técnicas pca,� Ph.D. dissertation, Universidad de Alcalá, 2007.
[121] L. Cai, Z. Wang, and H. Zhang, �An emg classi�cation method based on wavelet transform [andann],� in [Engineering in Medicine and Biology, 1999. 21st Annual Conf. and the 1999 AnnualFall Meeting of the Biomedical Engineering Soc.] BMES/EMBS Conference, 1999. Proceedingsof the First Joint, vol. 1. IEEE, 1999, pp. 565�vol.
[122] H. H. Örkcü and H. Bal, �Comparing performances of backpropagation and genetic algorithmsin the data classi�cation,� Expert Systems with Applications, vol. 38, no. 4, pp. 3703�3709, 2011.
[123] E. N. Sánchez and A. Y. Alanis, Redes neuronales: conceptos fundamentales y aplicaciones acontrol automático, 2006.
[124] K. Kipli, M. S. Muhammad, S. M. W. Masra, N. Zamhari, K. Lias, and D. A. A. Mat, �Perfor-mance of levenberg-marquardt backpropagation for full reference hybrid image quality metrics,�in Proceedings of the International MultiConference of Engineers and Computer Scientists, vol. 1,2012.
87
[125] C. Aguerrebere, G. Capdehourat, M. Delbracio, and M. Mateu, �Proyecto aguará: Reconocimien-to automático de caras.�
[126] M. Welling, �Fisher linear discriminant analysis,� Department of Computer Science, Universityof Toronto, 2005.
[127] L. G. Chova, Metodos de Clasi�cacion Aplicados al Reconocimiento de Campos de Cultivo apartir de Imagenes Hiperespectrales. Universal Publisher, 2002.
[128] G. A. Betancourt, �Las máquinas de soporte vectorial (svms),� Scientia et Technica, vol. 1, no. 27,2005.
[129] V. Riobó Otero, �Reconocimiento de localizaciones mediante máquinas de soporte vectorial,�2012.
[130] A. Subasi, �Classi�cation of emg signals using pso optimized svm for diagnosis of neuromusculardisorders,� Computers in biology and medicine, 2013.
[131] X.-Y. Wang, H.-Y. Yang, Y. Zhang, and Z.-K. Fu, �Image denoising using svm classi�cation innonsubsampled contourlet transform domain,� Information Sciences, 2013.
[132] J. Mora-Florez, G. Morales-España, and R. Barrera-Cárdenas, �Evaluación del clasi�cador basadoen los k vecinos más cercanos para la localización de la zona en falla en los sistemas de potencia,�Ingeniería e Investigación, vol. 28, no. 3, pp. 81�86, 2008.
[133] N. Suguna and K. Thanushkodi, �An improved k-nearest neighbor classi�cation using geneticalgorithm,� International Journal of Computer Science Issues, vol. 7, no. 2, pp. 18�21, 2010.
[134] D. H. Pelu�o Ordoñez et al., �Estudio comparativo de métodos de agrupamiento no supervisadode latidos de senales ecg,� Ph.D. dissertation, Universidad Nacional de Colombia-Sede Manizales,2009.
[135] P. Hansen and N. Mladenovi¢, �J-means: a new local search heuristic for minimum sum of squaresclustering,� Pattern Recognition, vol. 34, no. 2, pp. 405�413, 2001.
[136] A. K. Jain, M. N. Murty, and P. J. Flynn, �Data clustering: a review,� ACM computing surveys(CSUR), vol. 31, no. 3, pp. 264�323, 1999.
[137] D. Stashuk, �Emg signal decomposition: how can it be accomplished and used?� Journal ofElectromyography and Kinesiology, vol. 11, no. 3, pp. 151�173, 2001.
[138] D. Pascual, F. Pla, and S. Sánchez, �Algoritmos de agrupamiento,� Método Informáticos Avan-zados, 2007.
[139] H. D. Lerma, Metodología de la investigación: Propuesta, Anteproyecto y Proyecto. Ecoe Edi-ciones, 2003.
[140] S. Quintana, �Teoría de la kinantropometría,� 2004.
[141] E. Bies and F. de la Rosa, �Estudio morfológico en gimnastas argentinos de alto rendimiento,�Rev. Bras. Cineantropom. Desempenho Hum, vol. 8, no. 4, pp. 16�24, 2006.
88

[142] E. Córdoba and S. Fe, �Cineantropometria en jugadores de basquet.�
[143] M. Aragonés and J. Casajús, �Modi�caciones antropométricas debidas al entrenamiento. estudioslongitudinales,� Archivos de Medicina del Deporte, vol. 8, no. 32, p. 345, 1991.
[144] W. E. Prentice, Técnicas de rehabilitación en medicina deportiva. Editorial Paidotribo, 2001,vol. 44.
[145] E. Blázquez, B. Trombly, and M. Radomski, �Mejorar el control motor mediante biofeedback.�
[146] W. Beitz, G. Pahl, and K. Wallace, Engineering design: a systematic approach. Springer, 2003.
[147] B. Prasad, �Review of qfd and related deployment techniques,� Journal of Manufacturing Sys-tems, vol. 17, no. 3, pp. 221�234, 1998.
[148] NextGen, �Biometrics datalog',� http://www.nexgenergo.com/ergonomics/biodatalog.html,2011.
[149] T. M. Apostol, Análisis matemático. Editorial Reverté, 1976.
[150] P. Konrad, �The abc of emg,� A practical introduction to kinesiological electromyography, vol. 1,2005.
[151] E. Kellis and A. Katis, �Reliability of emg power-spectrum and amplitude of the semitendinosusand biceps femoris muscles during ramp isometric contractions,� Journal of Electromyographyand Kinesiology, vol. 18, no. 3, pp. 351�358, 2008.
[152] J. Fang, G. C. Agarwal, and B. T. Shahani, �Decomposition of emg signal by wavelet spectrummatching,� in Engineering in Medicine and Biology Society, 1997. Proceedings of the 19th AnnualInternational Conference of the IEEE, vol. 3. IEEE, 1997, pp. 1253�1256.
[153] J. J. Garavelo, L. R. Altimari, T. V. Camata, J. L. L. Vieira, T. Abrão, and A. C. Moraes, �Análiseespectral do sinal emg dos músculos super�ciais do quadríceps durante exercício submáximo decarga constante no cicloergômetro-doi: 10.4025/reveduc�s. v22i2. 9734,� Revista da EducaçãoFísica/UEM, vol. 22, no. 2, pp. 211�220, 2011.
[154] N. M. Kakoty and S. M. Hazarika, �Recognition of grasp types through principal components ofdwt based emg features,� in Rehabilitation Robotics (ICORR), 2011 IEEE International Confe-rence on. IEEE, 2011, pp. 1�6.
[155] C. U. Ranniger and D. Akin, �Emg mean power frequency determination using wavelet analysis,�in Engineering in Medicine and Biology Society, 1997. Proceedings of the 19th Annual Interna-tional Conference of the IEEE, vol. 4. IEEE, 1997, pp. 1589�1592.
[156] S. Thongpanja, A. Phinyomark, P. Phukpattaranont, and C. Limsakul, �Mean and median fre-quency of emg signal to determine muscle force based on time-dependent power spectrum,�Electronics and Electrical Engineering, vol. 19, no. 3, pp. 51�56, 2013.
[157] M. R. Ahsan, M. I. Ibrahimy, and O. O. Khalifa, �Vhdl modelling of �xed-point dwt for thepurpose of emg signal denoising,� in Computational Intelligence, Communication Systems andNetworks (CICSyN), 2011 Third International Conference on. IEEE, 2011, pp. 236�241.
89

[158] M. Amirmazlaghani and H. Amindavar, �Emg signal denoising via bayesian wavelet shrinkagebased on garch modeling,� in Acoustics, Speech and Signal Processing, 2009. ICASSP 2009. IEEEInternational Conference on. IEEE, 2009, pp. 469�472.
[159] G. Kaur, A. S. Arora, and V. Jain, �Comparison of the techniques used for segmentation ofemg signals,� in Proceedings of the 11th WSEAS international conference on Mathematical andcomputational methods in science and engineering. World Scienti�c and Engineering Academyand Society (WSEAS), 2009, pp. 124�129.
[160] M. Bienfait, Bases �siológicas de la terapia manual y de la osteopatía. Editorial Paidotribo,2006.
[161] S. Lima Castro, �Algoritmo basado en redes neuronales para el análisis de imagenes de rectos-copias y colonoscopias.� Master's thesis, Universidad Centroccidental LISANDRO ALVARADO,2011.
[162] A. Ramirez Arellano, �Construcción y validación de un modelo bayesiano para la clasi�cación demetas como apoyo a la planeación, caso de estudio programa operativo anual (poa) del institutopolitecnico nacional,� 2012.
[163] (2013, agosto). [Online]. Available: http://physionet.org/
[164] U. O. C. Irvine. (2013, agosto) Machine learning repository. [Online]. Available:http://archive.ics.uci.edu/ml/
[165] J. L. Rodríguez-Sotelo, D. Pelu�o-Ordoñez, D. Cuesta-Frau, and G. Castellanos-Domínguez,�Unsupervised feature relevance analysis applied to improve ecg heartbeat clustering,� Computermethods and programs in biomedicine, vol. 108, no. 1, pp. 250�261, 2012.
90
ANEXO 1: Formato de consentimiento informando sobre la par-ticipación en investigacion
INVESTIGACIÓN:
ANÁLISIS DE SEÑALES ELECTROMIOGRÁFICAS (EMG) PARA LA DETECCIÓN DENORMALIDAD Y ANORMALIDAD EN PATOLOGÍAS DE RODILLA.
Ciudad y fecha:___________________________Yo,_____________________________________una vez informado sobre los
propósitos, objetivos, procedimientos de intervención y evaluación que se llevarán a cabo en esta investi-gación y los posibles riesgos que se puedan generar de ella, autorizo a _____________________________,para la realización de las siguientes procedimientos:
1. Toma de medidas antropométricas de la pierna (Medida trocantérea tibial-lateral, Medida Tibialmedial-Maleolar medial, Muslo medial, Muslo y Pantorrilla).
2. Toma de medidas de las señales EMG super�cial en miembro inferior.
Adicionalmente se me informó que:
Mi participación en esta investigación es completamente libre y voluntaria, estoy en libertad deretirarme de ella en cualquier momento.
No recibiré bene�cio personal de ninguna clase por la participación en este proyecto de investi-gación. Sin embargo, se espera que los resultados obtenidos permitirán mejorar los procesos deevaluación de pacientes con condiciones clínicas similares a las mías.
Toda la información obtenida y los resultados de la investigación serán tratados con�dencial-mente. Esta información será archivada en papel y medio electrónico. El archivo del estudio seguardará bajo la responsabilidad de los investigadores.
Puesto que toda la información en este proyecto de investigación es llevada al anonimato, losresultados personales no pueden estar disponibles para terceras personas como empleadores,organizaciones gubernamentales, compañías de seguros u otras instituciones educativas. Estotambién se aplica a mi cónyuge, a otros miembros de mi familia y a mis médicos.
Hago constar que el presente documento ha sido leído y entendido por mí en su integridad de maneralibre y espontánea.
___________________________FirmaDocumento de identidad ____ No._________________ de____________
91
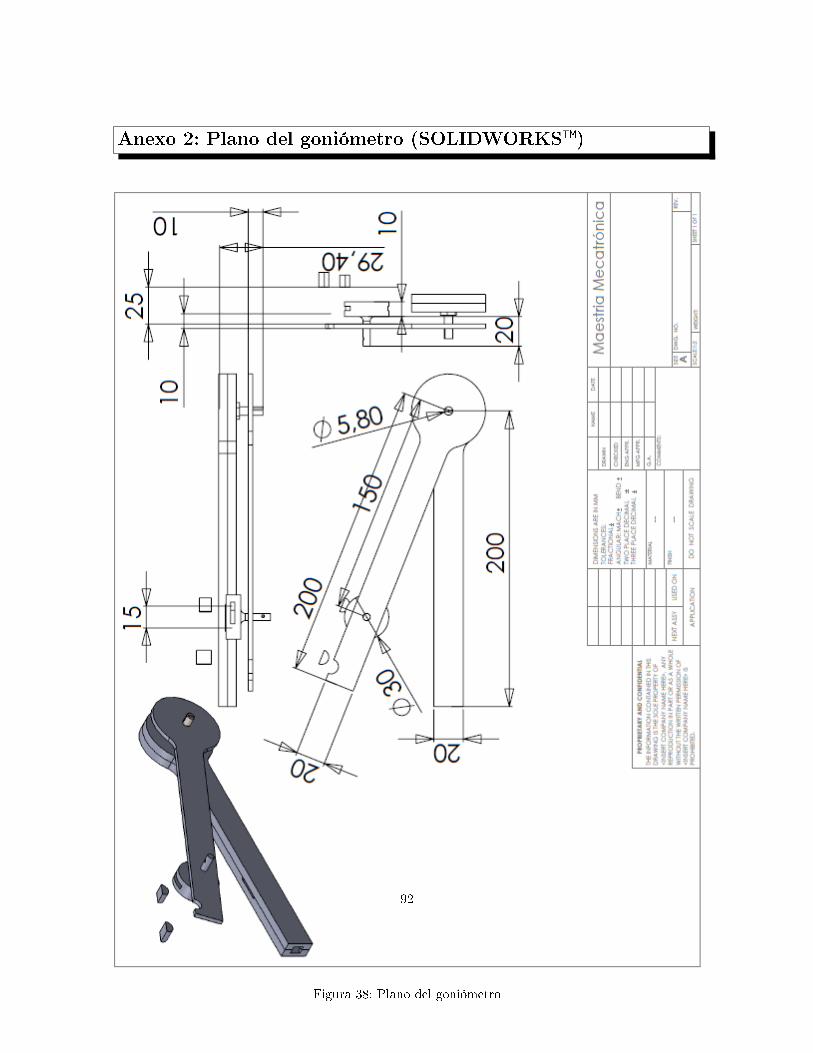
Anexo 2: Plano del goniómetro (SOLIDWORKS�)
Figura 38: Plano del goniómetro
92