humanoid robots -...
TRANSCRIPT
HumanoidRobots
From: Arne Siegel, Alexander Oeser

Table of content• History
– Rossum‘s Universal Robots– Ancient automata– Early automata
• Biped robots– Definition in Biomechanics– Problems– Examples
• Social robots– Fictional robots as companion– Uncanny vally– Examples of social robots
• Possible fields of application
• Conclusion
• Discussion

History
• Rossum‘s Universal Robots
• Ancient automata
• Early automata

History
• Rossum‘s Universal Robots
• Ancient automata
• Early automata

Rossum's Universal Robots
● Play by Karel
Capek 1921
● Coined the therm
robot
● From the Czech
word “robota”,
meaning forced
labour

History
• Rossum‘s Universal Robots
• Ancient automata
• Early automata

Ancient automata
● In greek mytholgy Hephaestus
constructed a 34 meters tall android out of
copper called Talos and two golden
female servants
● Al-Jazari described complex
programmable humanoid automata he
designed and constructed in the “Book of
Knowledge of Ingenious Mechanical
Devices“ in 1206

History
• Rossum‘s Universal Robots
• Ancient automata
• Early automata
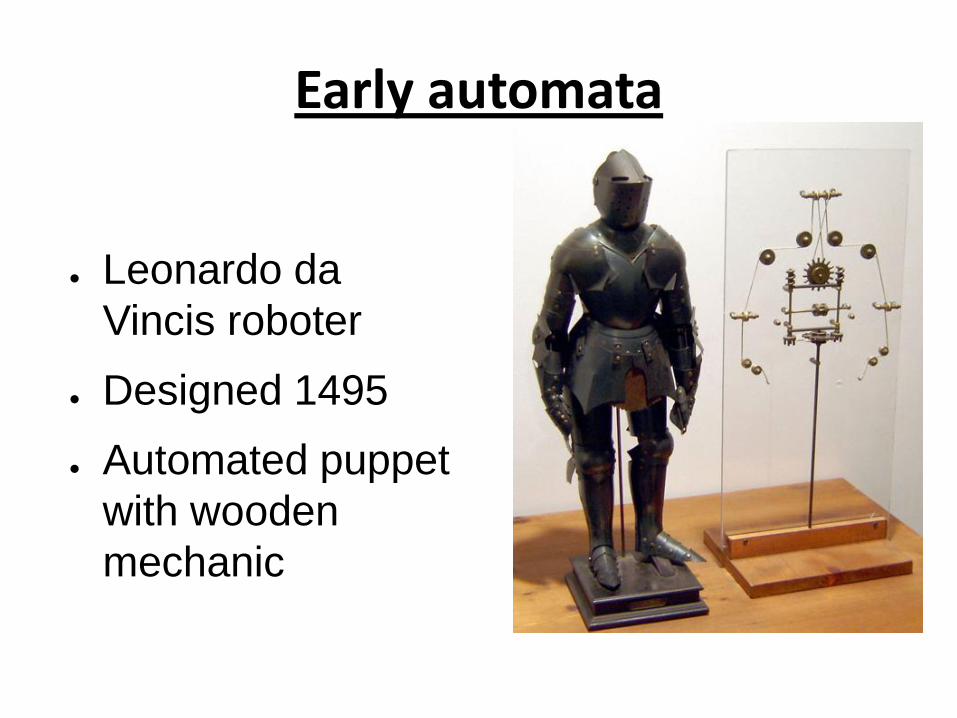
Early automata
● Leonardo da
Vincis roboter
● Designed 1495
● Automated puppet
with wooden
mechanic

Early automata
● Tea Automaton
● 19th century Japan
● Based on a design from the book Karakuri-zui by Hosokawa Hanzo published
● after his
● death in 1796

Biped robot
• Definition in Biomechanics
• Problems
• Examples

Biped robot
• Definition in Biomechanics
• Problems
• Examples

Definition in Biomechanics
• engineers, who examine bipedal walking orrunning describe it as repeatedly interruptedfalling. The phenomenom of stumblig is regardingto the controlled falling concept revealing . Usually stumbling is imagined as pulling back theleg of a moving person . In fact stopping themotion of a persons leg or slowing down themovement of a runner makes a person stumble. These individuals are already falling and preventthe stumbling leg to intervene is enough make a biped fall.

Biped robot
• Definition in Biomechanics
• Problems
• Examples

Problems
• States – Standing– Walking– Running– Jumping
• Problems– adjustment of balance.– avoid overcorrection– interrupt falling on time

Biped robot
• Definition in Biomechanics
• Problems
• Examples

ASIMO
• Concept
• Evolution
• Data
• Weakness

ASIMO
• Concept
• Evolution
• Data
• Weakness

ASIMO Concept
ASIMO History Creating New MobilityFollwing in the steps of Honda mortorcycles, cars and power products, Honda has taken up a new challenge in mobility --- the development of a two-legged humanoid robot that can walk.
Aiming for Function in the Human Living SpaceHonda wants to create a partner for people, a new kind of robot that functions in society.
The Concepts Behind Honda's Robot R&DThe main concept behind Honda's robot R&D was to create a more viable mobility that allows robots to help and live in harmony with people.Research began by envisioning the ideal robot form for use in human society.The robot would need to be able to maneuver between objects in a room and be able to go up and down stairs. For this reason it had to have two legs, just like a person.In addition, if two-legged walking technology could be established, the robot would need to be able to walk on uneven ground and be able to function in a wide range of environments.Although considered extremely difficult at the time, Honda set itself this ambitious goal and developed revolutionary new technology to create a two-legged walking robot.

ASIMO
• Concept
• Evolution
• Data
• Weakness

ASIMO Evolution

ASIMO Evolution
• 1986 - EO Static walking– walked very slowly – took up to 20 seconds for a single
step– after the robot begins moving one
foot forward, it has to wait until it has its weight balanced on that foot before it begins to move the other foot forward
– Humans don't walk that way, so the research continued

ASIMO Evolution

ASIMO Evolution
• 1987 - Dynamic walking(E1-3)– Development of a more human-like walk,
so called "dynamic walking" – leaned into the next step– shifting its weight and moving the other
foot forward
• 1991 - Walking like a pro(E4-6)– Walking where brought to “perfection”– walk on an incline, up stairs and on
uneven terrain– Because truly walking as a human actually
requires the use of the body, arms and head, engineers had to move on to the next step and add the rest of the body.

ASIMO Evolution

ASIMO Evolution
• 1987 - Dynamic walking(E1-3)– Development of a more human-like walk,
so called "dynamic walking" – leaned into the next step– shifting its weight and moving the other
foot forward
• 1991 - Walking like a pro(E4-6)– Walking where brought to “perfection”– walk on an incline, up stairs and on
uneven terrain– Because truly walking as a human actually
requires the use of the body, arms and head, engineers had to move on to the next step and add the rest of the body.

ASIMO Evolution

ASIMO Evolution
• 1993 - A more human-looking robot(P1, P2 and P3) – With a body, arms, hands and a
head– P1 188 cm tall and weighed 175 kg.– P2 scaled down slightly in height,
but weighed 210 kg– P3 was built at a more comfortable
(and less frightening) 157 cm tall. Weighing 130 kg


ASIMO Evolution
• 2000 – ASIMO(Advanced Step in Innovative Mobility)– more improvements were made to the walking system
– Sophisticated hip joints allowed ASIMO to turn smoothly
– reduce ASIMO's size it not be intimidating to people
– Technology called "predicted movement control" allowed ASIMO to predict its next movement automatically and shift its weight to make a turn. ASIMO's stride could also be adjusted in real time to make it walk faster or slower.

ASIMO
• Concept
• Evolution
• Data
• Weakness

ASIMO -Data

ASIMO
• Concept
• Evolution
• Data
• Weakness
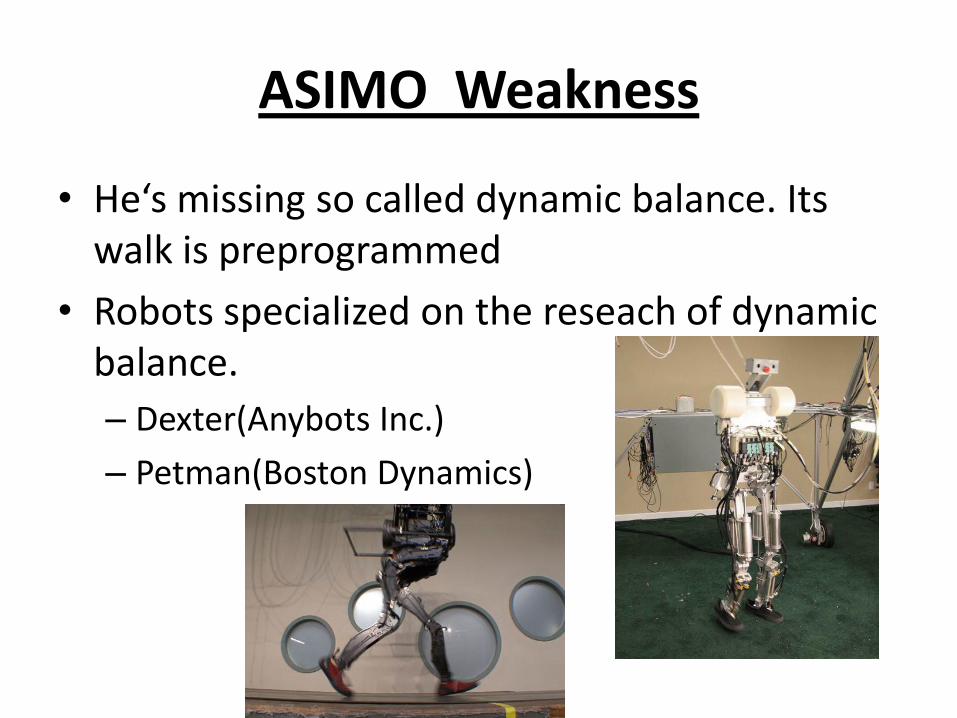
ASIMO Weakness
• He‘s missing so called dynamic balance. Its walk is preprogrammed
• Robots specialized on the reseach of dynamicbalance.
– Dexter(Anybots Inc.)
– Petman(Boston Dynamics)

Social robots
• Fictional robots as companion
• Uncanny vally
• Examples of social robots

Social robots
• Fictional robots as companion
• Uncanny vally
• Examples of social robots

Fictional robots as companion
● E.T.A. Hoffmann's "The Sandman”
protagonist falls in love with a puppet
driven by clockwork (1817)
● In Metropolis scientist Rotwang intends to
give the machine-human the image of his
lost love Hel and marry “her”(1927)
● Astro Boy was build to replace its
creator's dead son(1952)

Social robots
• Fictional robots as companion
• Uncanny vally .
• Examples of social robots


Uncanny valley
● Japaneseroboticist DoctorMasahiro Mori coined the term1970
● According toCynthia Breazealis it not a theory, it's conjecture

Robot human interaction
• Fictional robots as companion
• Uncanny vally
• Examples of social robots

Examples of Social Robots

Kismet (M.I.T. late 1990s)
● 4 color CCD cameras
● Voice synthesizer is able to
convey speaker
personality
● 21 actuators
for facial
expressions and head
movement
● has 3 degrees of freedom to
control gaze direction and 3 to
control its neck

Meet Nexi(M.I.T. present)
● NEXI body has human-like expressions and speech
● It features a mobile base that is self-balance, akin to a mini-Segway
● The face has 15 degrees of freedom

KOBIAN(Waseda University)
● Joint development with
● robot manufacturer tmsuk
● It combines the WABIAN-2
bipedal humanoid and the WE-
4RII emotion expression
humanoid
● KOBIAN can express seven
different feelings with his face
and assuming different poses

Leaving the laboratory
● Zeno Commercial product of Hanson Robotics
● Estimated price $ 299
● Connected via WiFi to your Pcrunning theSoftware

Possible fields of application
• research tool– simulate the human body and mind leads to a better
understanding of it– space exploration missions– research to build better prothesis
• practis tool– Medicine
• personal assistance– Household– Elderly people
• entertainment

Conclusion
• Robots are already pretty advanced
• Still a long way to the perfect humanoid robot– Movement too clumsy– No real autonomy– Todays robots are specialized on only one field of application– Further improvements have to be made concerning artificial intelligence– Not fully developed path planning and obstacle avoidance to allow robots
navigate in complex environments
• Upcoming fusion of men and machine

Thank you for listening.

Discussion:The other side of theuncanny valley
Could the friendly robot
pose a greater threat
than the „evil“ one?

Sources
• Wikipedia• http://denkikawaraban.wordpress.com/2009/08/31/roboterforschung-in-
japan/• http://www.popularmechanics.com/technology/engineering/robots/4343
892• http://www.newlaunches.com/archives/mits_nexi_an_advanced_human_
like_robot.php• http://www.societyofrobots.com• Petman
http://bostondynamics.com/robot_petman.html• Dexter
http://www.paulgraham.com/anybots.html• ASIMO
– http://world.honda.com/ASIMO/– http://science.howstuffworks.com/asimo5.htm