homolog´ıa singular, construcci´on, ejemplos y...
TRANSCRIPT

Homologıa Singular, Construccion,
Ejemplos y Aplicaciones
Jesus Tadeo Ibarra Tacho

2

Indice general
Introduccion 1
1. Preliminares 9
1.1. Algebraicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1.1. Anillos . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1.2. Modulos . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.1.3. Teoremas de isomorfismo para modulos . . . . . . . . . 12
1.1.4. Suma directa y modulos libres . . . . . . . . . . . . . . 13
1.2. Topologicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.2.1. Espacios topologicos, Definicion y Ejemplos . . . . . . 16
1.2.2. Interior y Cerradura . . . . . . . . . . . . . . . . . . . 17
1.2.3. Continuidad . . . . . . . . . . . . . . . . . . . . . . . . 18
1.2.4. Homeomorfismos . . . . . . . . . . . . . . . . . . . . . 20
1.2.5. Conexidad y Arcoconexidad . . . . . . . . . . . . . . . 23
2. Geometrıa Afın y Homologıa singular 29
2.1. Geometrıa Afın . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.1.1. Espacio Afın . . . . . . . . . . . . . . . . . . . . . . . . 29
2.1.2. Independencia Afın . . . . . . . . . . . . . . . . . . . . 31
2.1.3. Transformaciones afines . . . . . . . . . . . . . . . . . 34
2.1.4. Simplejos Singulares . . . . . . . . . . . . . . . . . . . 38
2.1.5. Operador frontera . . . . . . . . . . . . . . . . . . . . . 41
2.1.6. Ciclos y fronteras . . . . . . . . . . . . . . . . . . . . . 47
2.1.7. Homologıa . . . . . . . . . . . . . . . . . . . . . . . . . 48
2.1.8. Homologıa y Componentes Arcoconexas . . . . . . . . 49
2.1.9. Homomorfismo inducido . . . . . . . . . . . . . . . . . 55
3

4 INDICE GENERAL
3. Teorema de invarianza homotopica 59
3.1. Homotopıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 593.1.1. Homotopıa de funciones . . . . . . . . . . . . . . . . . 593.1.2. Homotopıa de espacios . . . . . . . . . . . . . . . . . . 62
3.2. El teorema de invarianza homotopica . . . . . . . . . . . . . . 64
4. Homologıa Relativa 73
4.1. Homologia relativa . . . . . . . . . . . . . . . . . . . . . . . . 734.1.1. Ciclos y fronteras relativas . . . . . . . . . . . . . . . . 734.1.2. Homomorfismo Inducido . . . . . . . . . . . . . . . . . 77
4.2. Sucesion Exacta . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5. El Teorema de escision 87
5.1. Dividiendo simplejos afines . . . . . . . . . . . . . . . . . . . . 875.2. El operador Subdivision . . . . . . . . . . . . . . . . . . . . . 895.3. Diametro de la Subdivision . . . . . . . . . . . . . . . . . . . . 915.4. El Teorema de Excision . . . . . . . . . . . . . . . . . . . . . . 95
6. Aplicaciones 101
6.1. La homologıa de las Esferas . . . . . . . . . . . . . . . . . . . 1016.1.1. La esfera y el Disco . . . . . . . . . . . . . . . . . . . . 1016.1.2. Homologıa de Sn . . . . . . . . . . . . . . . . . . . . . 103
6.2. El teorema de Brouwer . . . . . . . . . . . . . . . . . . . . . . 1066.3. Isometrıas en la esfera . . . . . . . . . . . . . . . . . . . . . . 1076.4. Campos vectoriales en la esfera Sn . . . . . . . . . . . . . . . 109
Apendice. Categorias y Funtores 113
Introduccion
La topologıa es el estudio de la continuidad, esto es, el estudio de todasaquellas propiedades que se preservan bajo funciones continuas. Esta defini-cion si bien no nos dice mucho del concepto, es muy acertada en el siguientesentido: Cuando estudiamos calculo definimos la continuidad de una funcionreal de variable real, estudiamos sus propiedades y vemos la importanciadel concepto, principalmente relacionado con cuestiones de convergencia; elconcepto de espacio topologico es una abstraccion de las propiedades que sepreservan bajo funciones continuas en los espacios euclidianos mas en con-creto, Rn, de esta forma tiene sentido hablar de funciones continuas en estosespacios. Decimos que dos espacios topologicos son equivalentes si sus topolo-gias son las mismas, salvo quisas por el nombre de los objetos, esto es, existeuna funcion continua con inversa continua entre un espacio y el otro, con-cepto que veremos con mas detalle en el capıtulo 1; a esta equivalencia lellamamos homeomorfismo.
Para subconjuntos de R3 podemos pensar en homeomorfismos como unafuncion que deforma el espacio doblando, estirando, contrayendo, expan-diendo, etc, sin pegar puntos ni hacer cortes, una nocion intuitiva por laque la topologıa es conocida tambien como la geometrıa de la bola de goma.
De esta forma, un problema muy importante y a la vez natural es el si-guiente: dados dos espacios topologicos, como saber si estos son homeomorfoso no, esto es, si existe una funcion continua con inversa continua de uno enel otro.
Atacar el problema en general puede muy complicado, de hecho es unproblema abierto. En principio si la respuesta fuera afirmativa, tendrıamosque exibir una funcion que cumpla con las condiciones. Si los espacios resul-tan ser no homeomorfos, la situacion puede ser aun mas complicada, puestenemos que demostrar que no existe dicha funcion, lo cual no podemosdescartar simplemente por no tener exito en encontrarla.
5

6 INDICE GENERAL
Incluso en subespacios de R3 tenemos este problema como lo muestra lafigura 1 . En ella tenemos una esfera, una toro y un doble toro, intuitiva-mente no podemos deformar la esfera continuamente para obtener el toro,analogamete tenemos la misma situacion con cualesquiera dos de ellos, perodemostrar que no existe tal funcion no depende de propiedades elementales.
Figura 1: Espacios No Homeomorfos
En un curso basico de topologıa se estudian invariantes topologicos, estoes, propiedades que se preserven por continuidad, de manera que si tenemosdos espacios topologicos tales que uno de ellos tiene tal propiedad y el otrono la tiene, estos no pueden ser homeomorfos, por lo que tendrıamos unarespuesta negativa a la pregunta.
Los invariantes que se estudian en topologıa algebraica son de naturalezaalgebraica, esto es, si X es un espacio topologico, aX le asignamos un espacioh(X) de tal forma que h(X) es un grupo,modulo,espacio vectorial o algebra oalguna otra estructura algebraica, de tal forma que si f : X → Y es continua,le asignamos una funcion h(f) : h(X) → h(Y ) que h(f) es un homomorfismoy que h(fg) = h(f)h(g).
De esta manera estamos pasando de la topologıa al algebra, por lo quepropiedades algebraicas de h(X) seran invariantes topologicos para X, dondeen muchas ocaciones, el espacio h(X) es mucho mas simple de estudiar.
El invariante a estudiar en esta tesis en un modulo, llamado el modulo dehomologıa de X, que puede ser un grupo abeliano si tomamos coeficientes enZ, hecho que veremos en el capıtulo 2. Este invariante funciona muy bien enespacios que provienen directamente de la geometrıa, pero se define para unespacio topologico arbitrario.
El problema del homeomorfismo es ya de por si, bastante importantepara justificar el estudio de la homologıa, pero mas aun, tenemos que estaherramienta una ves contruida y trabajada tiene aplicaciones muy impor-tantes como el teorema del punto fijo de Brouwer, del cual incluimos una

INDICE GENERAL 7
demostracion en el capıtulo 6.En el capıtulo 1 estudiamos todo el material basico sobre algebra y
topologıa, de manera que la tesis es autocontenida.Aquı definimos modulos, presentamos los teoremas de isomorfismo y es-
tudiamos sumas directas y modulos libres.En la parte topologica definimos espacio topologico, continuidad , el ma-
terial basico acerca de esta, conexidad, arcoconexidad y compacidad.En el capıtulo 2 construimos la homologıa del espacio, empezamos estu-
diando geometrıa afın de una manera elemental, obtenemos lo necesario conrespecto a la convexidad y las coordenadas baricentricas.
Cuando definimos homologıa, calculamos la homologıa de un punto, ve-mos lo que pasa en las componentes arcoconexas y otras propiedades elemen-tales, terminamos el capitulo viendo cuestiones funtoriales de esta.
En el capıtulo 3 empezamos estudiando homotopıas de manera elemental,definimos la homotopıa de funciones y la homotopıa de espacios topologicosa travez de la anterior, estudiamos una retraccion y vemos que los modulosde homologıa son invariantes homotopicos.
En el capıtulo 4 estudiamos la homologıa con respecto a un subespa-cio, recontruimos el concepto de homologıa ahora para pares de espacios yverificamos sus propiedades elementales, despues de esto estudiamos la suce-sion exacta de homologıa, objeto fundamental en el estudio del calculo de lahomologıa.
En el capıtulo 5 estudiamos el teorema de escision, basicamente buscamosver que podemos dividir un simplejo en simplejos mas pequenos que repre-senten la misma clase de homologıa, de esta manera, el teorema de escisionestablece que ciertos subespacios son despreciables en terminos de homologıade una pareja (X,A), esto es,que podemos omitir este subespacio U de Xdel par (X,A) de manera que la homologıa permanece intacta.
El ultimo capıtulo es de aplicaciones, calculamos la homologıa de lasesferas, demostramos el teorema del punto fijo de Brouwer y el teorema dela Bola peluda.
Por cuestiones de tiempo y espacio, ciertos resultados acerca de la ho-mologıa quedaron fuera del presente trabajo, ejemplo de ellas fueron grupofundamental, la relacion entre π1(X) y H1(X), complejos CW , la sucesion deMayer Vietoris, fundamentales en el calculo de la homologıa de una gran can-tidad de espacios, esto porque se concentro el trabajo en estudiar la homologıade las esferas, estos resultados como muchos otros se pueden encontrar en[4], [3], [9].

8 INDICE GENERAL
Agradecimientos
Deseo agradecer muy en especial a mi familia, pricipalmente a mis padresEvelia Tacho Gomez y Francisco Bernardo Ibarra Dominguez por habermedado la vida y segundo por haberme apoyado en todo y en particular conmis estudios. Por todo el apoyo incondicional que me dieron para seguir conesto y tambien por el entendimiento y paciencia sobre el tiempo que paseen la escuela. A mis dos hermanas, Patricia Marıa Ibarra Tacho y LizetteGuadalupe Ibarra Tacho por el apoyo y confianza mostrado a lo largo de estetiempo, ası mismo agradesco el apoyo mostrado por mis abuelos, primos, tiosy familia en general de la que estoy muy orgulloso de pertenecer.
Agradesco profundamente a mis maestros, a todos los profesores del De-partamento de Matematicas de la Universidad de Sonora por la enorme laborde educacion que me brindaron a lo largo de la carrera, todas esas horas declase donde me fui formando como matematico y que influyeron de granmanera en mis decisiones academicas. Especialmente quiero agradecer a midirector de Tesis Dr. Martın Eduardo Frıas Armenta y a mis sinodales M.C.Carlos Alberto Robles Corbala, M.C. Guillermo Davila Rascon y Dr. RafaelRoberto Ramos Figueroa, por el enorme trabajo de revision de Tesis queestos desarrollaron, por tomarse el tiempo de hacer todas las debidas correc-ciones, crıticas, comentarios ası como el apoyo brindado a lo largo de esta,con las cuales este trabajo no serıa el mismo. Ası Mismo quiero agradeceral Dr. Ramiro Avila Godoy quien fue mi maestro en la preparatoria y queinfluyo enormemente para que estudiara esta carrera.
Muy en especial quiero agradecer a Rosa Ileana Ybarra Cruz por ser mimejor amiga, haber estado conmigo de una u otra forma por todos estosanos y por toda esa confianza que siempre senti de ella, que me hizo pasarpor grandes momentos y siempre ha estado presente, una persona que indis-cutiblemente ha influido mucho en mi vida. Quiero agradecer a mis amigos,companeros de clase y todas esas personas que han estado conmigo a lo largode mi vida y que me han apoyado dentro y fuera de la escuela, en cuestionesacademicas y otras personales por los grandes momentos que hemos pasado.

Capıtulo 1
Preliminares
1.1. Algebraicos
1.1.1. Anillos
Definicion 1.0.1. Sea R un conjunto no vacıo y sean + : R × R → R y· : R× R → R dos operaciones, denotadas como
+(a, b) := a + b
·(a, b) := a · b
Llamadas suma y producto respectivamente, se dice que (R,+, ·) es un anillo
si
1. (R,+) es un grupo abeliano, esto es:
• (a+ b) + c = a+ (b+ c) para todo a, b, c ∈ R.
• Existe un elemento 0 ∈ R tal que a+ 0 = 0 ∀a ∈ R.
• Para cada a ∈ R existe un elemento (−a) ∈ R tal que a+(−a) = 0.
• a+ b = b+ a ∀a, b ∈ R.
2. (R, ·) es un semigrupo, esto es:
• (a · b) · c = a · (b · c) para todo a, b ∈ R
3. se cumplen las leyes distributivas, es decir
9

10 CAPITULO 1. PRELIMINARES
• a · (b+ c) = a · b+ a · c para todo a, b, c ∈ R
• (a + b) · c = a · c+ b · c para todo a, b, c ∈ R
Usualmente se indicara (R,+, ·) simplemente por R, y al producto a · bpor yuxtaposicion, esto es, ab denotara a · b. Al elemento neutro de la sumasiempre lo denotaremos por 0. Cuando manejemos expresiones con sumas yproductos, el producto tiene prioridad sobre la suma, esto es, ab + c denota(ab) + c y no a(b+ c).
A continuacion definiremos ciertas clases particulares de anillos, que recibenun nombre especial por cumplir con axiomas adicionales.
Definicion 1.0.2. Si existe un elemento neutro para el producto, decimosque R es un anillo con unitario, o anillo con 1, y a ese neutro le llamamoselemento unitario o 1 del anillo.
Si · es conmutativa, es decir, a ·b = b ·a para cada par a, b ∈ R, decimosque R es un anillo conmutativo, si (R\{0}, ·) es un grupo diremos que R esun anillo con division, si se cumplen estas ultimas dos, diremos que R es uncampo.
Ejemplo 1.1. Sean (R,+, ·) = (Z,+, ·), R = (Q,+, ·), R = (R,+, ·), o R =(C,+, ·), con las operaciones usuales, entonces R es un anillo, en cualquiercaso, conmutativo con 1, notese que todos excepto Z son campos.
Ejemplo 1.2. Sea (R,+, ·) el conjunto de polinomios con coeficientes com-plejos con las operaciones + y · usuales, este es un anillo conmutativo con1.
Ejemplo 1.3. Sea R el conjunto de matrices cuadradas de nxn con coefi-cientes complejos, con la suma definida componente a componente y la mul-tiplicacion de matrices usual, este es un anillo no conmutativo con 1 paran > 1.
Gran parte de la teorıa que veremos a lo largo del presente trabajo escierta para anillos en general, historicamente la homologıa surgio usandocoeficientes enteros, Z es un anillo conmutativo con 1, propiedades que sonsuficientes para establecer los resultados basicos de la teorıa, usaremos losaxiomas de anillo y estos dos axiomas adicionales para referirnos a un anillo,estas son, conmutatividad y elemento unitario.
Dicho de otra forma, anillo conmutativo con 1 sera llamado sim-
plemente anillo de ahora en adelante.

1.1. ALGEBRAICOS 11
1.1.2. Modulos
Definicion 1.0.3. Sea R un anillo y (M,+) un grupo abeliano. Diremosque M es un R-modulo si existe una funcion · : R×M →M ,denotada por·(a,m) 7→ am que cumple lo siguiente:
1. (a+ b)m = am+ bm para cada a, b ∈ R y para cada m ∈M
2. a(m+ n) = am+ an para cada a ∈ R y para cada m,n ∈M
3. ab(m) = a(bm) para cada a, b ∈ R y para cada m ∈M
4. 1m = m para cada m ∈M
Ejemplo 1.4. Sea V un espacio vectorial sobre F , entonces V es unF -modulo.
Ejemplo 1.5. Sea (G,+) un grupo abeliano, entonces G es un Z-modulo,con la operacion
nx =
0x = 0(n− 1)x+ x si n > 0−((−n)x) si n < 0
Cuando R forma un campo, un R-modulo resulta ser un espacio vectorial,en este sentido el concepto de R-modulo es una generalizacion de el de espaciovectorial.
Definicion 1.0.4. Sean M, N R-modulos, y f : M → N decimos que f esun homomorfismo de R-modulos si
1. f(m1 +m2) = f(m1) + f(m2)
2. f(am) = af(m)
Si f es biyectiva decimos que f es un isomorfismo, y que M y N son iso-morfos, lo cual denotaremos por M ∼= N .
Definicion 1.0.5. Sean M,N R-modulos y f : M → N un homomorfismode R-modulos. Se define el nucleo del homomorfismo f como el conjunto
{m ∈M : f(m) = 0}
El cual lo denotaremos como ker f .
12 CAPITULO 1. PRELIMINARES
Definicion 1.0.6. Sea N ⊂M , decimos que N es submodulo de M si (N,+)es subgrupo de (M,+) y para cada a ∈ R, y cada n ∈ N tenemos an ∈ N .Esto lo denotamos por N ≤M .
Notese que en este caso, N es por sı mismo un R-modulo. De esta forma,como cada subgrupo de un grupo abeliano es normal, podemos formar elgrupo cociente M/N
M/N = {m+N : m ∈M}
donde m + N = {m + n : n ∈ N}. De esto se sigue que m1, m2 ∈ Mpertenecen a la misma clase si m1 −m2 ∈ N , es decir, m1 +N = m2 +N .
En este caso podemos definir un producto en el conjunto M/N , de talforma que M/N,+, · sea un R-modulo con las operaciones en M/N definidasde la siguiente forma
(m1 +N) + (m2 +N) = (m1 +m2) +N si m1, m2 ∈M
a(m+N) = (am) +N si a ∈ R,m ∈M
Se define la proyeccion natural π : M →M/N como π(m) = m+N . Es facilver que este es un homomorfismo sobreyectivo de M a M/N .
1.1.3. Teoremas de isomorfismo para modulos
A continuacion presentamos los teoremas de isomorfismo para R-modulos,cuya prueba es completamente analoga a la de grupos, y se pueden encontraren[6], pagina 170-173 y [12] pagina 135-137,165.
Teorema 1.1 (Primer teorema de isomorfismo). Sean M y N , R-modulos,f : M → N homomorfismo con nucleo K. Entonces K es submodulo de M ,y M/K es isomorfo a la imagen de f , Donde la funcion f : M/K → Im(f)dada por f(m+K) = f(m) es un isomorfismo.
Teorema 1.2 (Segundo teorema de isomorfismo). Sea M un R-modulo,N,K submodulos de M , entonces N ∩K es submodulo de N , y N/(N ∩K)es isomorfo a (N +K)/K.
Teorema 1.3 (Tercer teorema de isomorfismo). SeaM un modulo,K ≤ N ≤M ,entonces N/K es submodulo de M/K, y ademas
(M/K)/(N/K) ∼= M/N

1.1. ALGEBRAICOS 13
Teorema 1.4 (Teorema de la correspondencia). Sea M un modulo, con N unsubmodulo de M y π : M → M/N el homomorfismo canonico, entonces hayuna correspondencia biunıvoca entre los submodulos de M/N y los submodu-los de M que contienen a N . Mas aun, si N ≤ S, la correspondencia esta dadapor F (S) = π(S).
1.1.4. Suma directa y modulos libres
Dada una coleccion de modulos, podemos definir con estos un nuevomodulo, recıprocamente, dado un modulo, podemos preguntarnos si pode-mos representarlo a traves de modulos mas simples.
Dados N,K ⊂M , donde M es un modulo, recordemos que
N +K = {n + k : n ∈ N, k ∈ K}
Definicion 1.4.1. Decimos que M es la suma directa de N y K cuandoN,K ≤M, N +K = M y N ∩K = {0} .
En realidad lo que acabamos de definir es conocida como suma directainterna, notese que cada elemento de M se expresa de manera unica comosuma de elementos de N y K.
La suma se dice interna pues N y K son submodulos de M . Si tomamosdos modulos arbitrarios, necesitamos que ambos sean submodulos de unmodulo M para que tenga sentido hablar de suma directa interna en el sen-tido que acabamos de definir.
Definicion 1.4.2. Sean N y K modulos sobre un anillo R, y M = N ×K,M con las operaciones definidas
(n1, k1) + (n2, k2) = (n1 + n2, k1 + k2)
r(n, k) = (rn, rk)
Es decir, componente a componente , con esto, M = N ×K es un R-modu-lo, llamado modulo producto, o suma directa externa, y la denotaremos porM = N ⊕K.
Notemos que de esta forma, N × {0} ∼= N, {0} ×K ∼= K, y que
M = (N × {0}) + ({0} ×K).

14 CAPITULO 1. PRELIMINARES
Debido a esto, cada suma directa externa viene de una suma directainterna y viceversa.
Podemos definir recursivamente la suma directa de una familia finita{Mk}
nk=1 de modulos , esto es,
n⊕
k=1
Mk = M1 ⊕M2 ⊕ · · · ⊕Mn = (M1 ⊕M2 ⊕ . . .Mn−1) ⊕Mn
Incluso si la familia es infinita podemos definir la suma directa de lasiguiente forma.
Definicion 1.4.3. Sea {Mλ}λ∈Λ, una familia de R-modulos, se define lasuma directa de la familia {Mλ}λ∈λ, denotada como
M =⊕
λ∈Λ
Mλ
como el subconjunto del producto cartesiano∏λ∈Λ
Mλ tal que mλ = 0 salvo
para un conjunto finito de λ ’s. Denotamos los elementos de⊕λ∈Λ
Mλ como
sumas formales finitas de elementos de Mλ para cada λ esto es,
⊕
λ∈Λ
Mλ = {mλ1+mλ2
+ · · ·+mλn : n ∈ N, λk ∈ Λ, mλk∈Mλk
}
Un elemento en M =⊕λ∈Λ
Mλ lo denotaremos como
m =∑
λ∈Λ
mλλ
Donde mλ ∈ Mλ. Las operaciones en⊕λ∈Λ
Mλ se definen de la siguiente
forma:
(∑
λ∈Λ
mλλ
)
+
(∑
λ∈Λ
nλλ
)
=∑
λ∈Λ
(mλ + nλ)λ
r
(∑
λ∈Λ
mλλ
)
=∑
λ∈Λ
(rmλ)λ

1.1. ALGEBRAICOS 15
Hasta este momento tenemos un punto importante, interpretaremos lasuma de elementos en modulos distintos como sumas formales, no se re-alizara otra operacion aunque esta pudiera tener sentido.
Ejemplo 1.6. Sea R = R, Mλ = R, Λ = {1, 2, . . . n} entonces
M =⊕
λ∈Λ
Mλ = Rn
Si Λ es finito, la suma directa de la familia {Mλ}λ∈Λ coincide con la sumadirecta definida recursivamente para familias finitas.
Definicion 1.4.4. Sea M un R-modulo, diremos que M es libre si es iso-morfo como R-modulo a una suma directa de R sobre un conjunto Λ, estoes, los elementos de M son combinaciones lineales de elementos de R.
Cuando hacemos suma directa de la familia {Rλ}λ∈Λ donde Rλ = R, lafamilia {λ}λ∈Λ es una base para M =
⊕λ∈Λ
Rλ en el sentido de algebra lineal,
esto es, un conjunto linealmente independiente sobre R que genera a M .
Los modulos libres son los modulos donde tiene sentido hablar de base, enparticular, todo R-Modulo, sobre un campo R es libre, esto es, todo espaciovectorial tiene una base, lo cual es consecuencia del Lema de Zorn, y lopodemos encontrar en [5], pagina 190.

16 CAPITULO 1. PRELIMINARES
1.2. Topologicos
1.2.1. Espacios topologicos, Definicion y Ejemplos
Ahora definiremos nuestro principal objeto de estudio del presente traba-jo, este es el concepto de espacio topologico. La definicion formal es abstractay completamente conjuntista, por lo que a primera vista oculta el sentidogeometrico de aplicacion de la teorıa, afortunadamente el concepto genera-liza a los espacios euclidianos ,por lo que manejar el concepto de topologıanos acerca a pensar geometricamente en espacios donde la intuicion puederesultar enganosa, como los espacios de funciones en analisis por ejemplo.
De esta forma definimos un espacio topologico de la siguiente manera.
Definicion 1.4.5. Sea X un conjunto no vacıo, y T una familia de subcon-juntos de X, diremos que (X,T ) es un espacio topologico, cuando
1. ∅, X ∈ T .
2. si {Ai}i∈I es una coleccion de elementos de T entonces⋃i∈I
Ai ∈ T .
3. si {Ai}ni=1 es una coleccion de elementos de T entonces
n⋂i=1
Ai ∈ T .
A los elementos de T les llamamos conjuntos abiertos de X o sim-plemente abiertos, al conjunto T le llamamos topologıa en X.
Ejemplo 1.7. Sea X 6= ∅, y T = {∅, X}, entonces (X,T ) es un espaciotopologico, a esta topologıa le llamamos topologıa indiscreta.
Ejemplo 1.8. Sea X 6= ∅ y T = 2X entonces (X,T ) tambien es un espaciotopologico, a esta topologıa le llamamos la topologıa discreta, que esta enun extremo opuesto a la anterior; estos dos ejemplos sirven para ver quesiempre podemos definir al menos dos topologias en cualquier conjunto conmas de un punto.
Definicion 1.4.6. Sea X un conjunto y d : X ×X → R. Se dice que (X, d)es un espacio metrico si
1. d(x, y) = d(y, x) para todo x, y ∈ X
2. d(x, y) ≥ 0 para todo x, y ∈ X, d(x, y) = 0 si y solo si x = y

1.2. TOPOLOGICOS 17
3. d(x, y) ≤ d(x, z) + d(z, y)
Definicion 1.4.7. Sea (X, d) un espacio metrico, x0 ∈ X y r ∈ R, definimosla bola con centro en x0 de radio r, denotada por Br(x0) como el conjunto
Br(x0) = {x ∈ X : d(x, x0) < r}
Ejemplo 1.9. Sea (X, d) un espacio metrico, vemos a este de manera naturalcomo espacio topologico, donde los abiertos son los conjuntos que son unionde bolas abiertas; siempre que se hable de un espacio metrico como espaciotopologico se estara considerando esta topologıa como la natural.
Ejemplo 1.10. Sea X = Rn con la metrica usual, esto es, si x = (x1, x2, . . . , xn)y y = (y1, y2, . . . , yn) entonces
d(x, y) =
√√√√n∑
k=1
(xk − yk)2
Por ser d un caso particular de espacio metrico, Rn con la topologıa inducidapor la metrica es un espacio topologico.
Sea (X,T ) un espacio topologico, A ⊂ X. Siempre es posible darle unatopologıa al conjunto A en terminos de la de X.
Definicion 1.4.8. Sea (X,T ) espacio topologico, se define el conjunto
TA = {U ∩A : U ∈ T }
a TA le llamamos la topologıa relativa de A con respecto a X.
Es facil ver que esta es en efecto una topologıa en A. Esta es la topologıanatural para los subconjuntos de Rn.
Por economıa de notacion, cuando se sobrentienda la topologia de X nosreferiremos a X como espacio topologico en lugar de (X,T ).
1.2.2. Interior y Cerradura
Definicion 1.4.9. Sea (XT ) un espacio topologico, diremos que A ⊂ X esabierto si A ∈ T .Diremos que A es cerrado si X\A ∈ T

18 CAPITULO 1. PRELIMINARES
De esta forma un subconjunto de A puede ser abierto, cerrado, ambas oninguna , todo depende de la topologıa de X y del conjunto A en particular.
Proposicion 1.4.1. Sea (X,T ) espacio topologico y F el conjunto de sub-conjuntos cerrados de X. Entonces
1. ∅, X ∈ F
2. Si {Ai}i∈I estan en F , entonces⋂i∈I
Ai ∈ F
3. Si {Ak}nk=1 estan en F , entonces
n⋃k=1
Ak ∈ F
Demostracion. Se sigue directo de las leyes de D’Morgan.
Definicion 1.4.10. Sea A ⊂ X. Se define el interior de A denotado por A◦
como la union de todos los abiertos contenidos en A, esto es
A◦ = ∪{U ∈ T : U ⊂ A}
Definimos a la cerradura de A, denotada por clA como la interseccion detodos los cerrados que contienen a A, esto es
clA = ∩{U ∈ F : A ⊂ U}
A◦ es abierto por la definicion 1.4.5 y clA es cerrado Por la Proposicion1.4.1 independientemente de como sea A, ademas se pueden dar los casosA◦ = ∅ y clA = X.
1.2.3. Continuidad
Ahora definiremos continuidad de funciones en espacios topologicos, elconcepto mas importante de la topologıa pues las propiedades topologicasson aquellas que se preservan por continuidad.
Definicion 1.4.11. Sean (X,TX), (Y,TY ) espacios topologicos, y f : X →Y , diremos que f es continua, si f−1(U) ∈ TX para cada U ∈ TY .
Proposicion 1.4.2. La composicion de funciones continuas es continua.

1.2. TOPOLOGICOS 19
Demostracion. Sea f : X → Y y g : Y → Z funciones continuas,queremosver que g ◦ f : X → Z es continua.
Sea U ∈ TZ , buscamos demostrar que (g ◦ f)−1(U) ∈ TX .
(g ◦ f)−1(U) = f−1 ◦ g−1(U) = f−1(g−1U)
pero g−1U ∈ TY por continuidad de g. De esta forma f−1(g−1U) ∈ TX porcontinuidad de f .
La continuidad en un espacio topologico es una generalizacion de la con-tinuidad en un espacio metrico, ası mismo, como R es un espacio metrico,
Definicion 1.4.12. Sean (X, dX), (Y, dY ) espacios metricos. Decimos queuna funcion f : X → Y es continua en x0 si dado ǫ > 0 existe δ tal que
dX(x, x0) < δ ⇒ dY (f(x), f(x0)) < ǫ
Una funcion es continua, si lo es en todos los puntos de X.
Esto es, dado ǫ > 0, existe δ tal que si x ∈ Bx0(δ) entonces f(x) ∈ Bf(x0)(ǫ)
Esto ocurre si y solo si f(Bδ(x0)) ⊂ Bǫ(f(x0))Ahora, f(A) ⊂ B si y solo si A ⊂ f−1(B).Por lo que la condicion de continuidad es equivalente a que
Para cada ǫ > 0 existe δ tal que Bδ(x0) ⊂ f−1(Bǫ(f(x0)))
De aquı viene el siguiente teorema.
Teorema 1.5. Sean (X, dX), (Y, dY ) espacios metricos, f : X → Y . f escontinua como funcion entre espacios metricos si y solo si lo es como funcionentre espacios topologicos
Demostracion. (⇒) Sea U abierto en Y , queremos ver que f−1(U) es abiertoen X. Sea x0 ∈ f−1(U) de aquı, f(x0) ∈ U , para Bǫ(f(x0)) ⊂ U existe δ talque Bδ(x0)) ⊂ f−1(Bǫ(f(x0))) ⊂ f−1(U), es decir, Bδ(x0)) ⊂ f−1(U) , por lotanto f−1(U) es abierto.
(⇐) Sea ǫ > 0, x ∈ X, como Bǫ(f(x)) es abierto en Y entonces f−1(Bǫ(f(x)))es abierto en X, y como x ∈ f−1(Bǫ(f(x))) entonces existe δ tal que
Bδ(x) ⊂ f−1(Bǫ(f(x)))
De esta manera el concepto de continuidad ǫ − δ es equivalente a lacontinuidad topologica cuando nos restringimos a los espacios metricos, deaquı que la continuidad topologica resulta ser una generalizacion de la con-tinuidad metrica.

20 CAPITULO 1. PRELIMINARES
1.2.4. Homeomorfismos
Ya que tenemos definida la continuidad, necesitamos saber cuales serannuestras equivalencias en espacios topologicos.
Definicion 1.5.1. Sean (X,TX), (Y,TY ) espacios topologicos, y f : X → Y .Se dice que f es un homeomorfismo si f es continua, biyectiva y coninversa continua. Si existe f un homeomorfismo f entre X y Y , diremos queX y Y son homeomorfos.
Toda propiedad que se preserve bajo funciones continuas es llamadapropiedad topologica, o invariante topologico, esto es, si existe un homeo-morfismo de X a Y , entonces tenemos los puntos de X en correspondenciabiunıvoca con los puntos de Y , y los abiertos de X en correspondencia bi-unıvoca con los abiertos de Y , en pocas palabras, un homeomorfismo solocambia las etiquetas de los objetos, pero mantiene intactas sus topologıas.
Intuitivamente, un homeomorfismo entre dos subespacios de R3 es unaforma de doblar, estirar, encojer, o curvar uno para llegar al otro, sin hacercortes, ni pegar puntos, esto es, como si los espacios fueran de goma, por loque la topologıa en ocasiones es llamada la geometrıa de la bola de goma.
Ejemplo 1.11. Un cırculo es homeomorfo a un cuadrado
Figura 1.1: Circulo y Cuadrado
El homeomorfismo viene dado de la siguiente forma:Sean
X = {(x, y) ∈ R2 : x2 + y2 = 1}
Y = {−1, 1} × [−1, 1] ∪ [−1, 1] × {−1, 1}
X es el circulo de radio 1 centrado en el origen y Y es el cuadrado de vertices(−1,−1), (1,−1), (1, 1), (−1, 1).

1.2. TOPOLOGICOS 21
f : X → Y y f−1 : Y → X estan dados por
f(x, y) =1
m(x, y) f−1(x, y) =
1
r(x, y)
Donde m = max{|x|, |y|} y r =√x2 + y2
Geometricamente marcamos cuatro puntos en la circunferencia y en-derezamos los arcos correspondientes para obtener el cuadrado como lo ilustrala figura 1.1.
Ejemplo 1.12. Una el toro (la superficie de una dona) es homeomorfa auna taza de cafe.
El ejemplo mas popular de la topologıa, los movimientos estan ilustradosen la figura 1.2. El hecho es que podemos deformar al toro de manera conti-nua hasta obtener la esfera, este ejemplo da origen al comentario de que untopologo no distingue entre una dona y una tasa de cafe.
Figura 1.2: La dona y la taza

22 CAPITULO 1. PRELIMINARES
Ejemplo 1.13. Dos bandas pegadas son homeomorfas a un toro menos elinterior de un disco.
El homeomorfismo viene dado en la figura 1.3, lo que hacemos en estecaso es defomar el espacio continuamente hasta obtener el toro menos elinterior de un disco.
Figura 1.3: Ejemplo de Homeomorfismo
Podemos ver, ası tambien, que podemos hacer cortes temporalmente paradoblar encojer, y curvar con la condicion de que al final peguemos los puntosque hayamos separado al principio, esta idea se formaliza con la topologıacociente que podemos encontrar en [11], pagina 136. .
Ejemplo 1.14. El circulo y el pretzel son homeomorfos
Figura 1.4: Circulo y Pretzel

1.2. TOPOLOGICOS 23
Esta idea de doblar los espacios puede parecer muy informal y lo queestamos haciendo es definiendo las cosas de manera formal, pero no se pre-senta dificultad en formalizar estas ideas, pues quedan bien establecidas conel concepto de homotopıa, que veremos en el capıtulo 3.
1.2.5. Conexidad y Arcoconexidad
Sea X un espacio topologico, queremos decir cuando X es de una solapieza. Un concepto topologico para esto es llamado conexidad que veremosmas adelante, el problema es que a simple vista no es intuitivo, pues se daen un sentido negativo. El concepto que vamos a estudiar ahora esta masemparentado a nuestra intuicion, y es la de que un conjunto es de una piezasi las partes de este se pueden unir por curvas, veamos esto formalmente.
Definicion 1.5.2. Una trayectoria en un espacio topologico (X,T ) es unafuncion continua f : [0, 1] → X; si f(0) = x y f(1) = y diremos que f unex con y.
A una trayectoria tambien se le conoce como camino o arco.
Definicion 1.5.3. Un espacio topologico (X,T ) es conexo por trayecto-
rias o arcoconexo si cualesquiera dos puntos en X pueden ser unidos porun arco.
Ya definido el concepto veamos que esta es una propiedad topologica
Teorema 1.6. Sea (X,TX) arcoconexo y f : X → Y continua. Entoncesf(X) es arcoconexo. En particular, si f es suprayectiva, entonces (Y,TY ) esarcoconexo.
Demostracion. Sean a, b ∈ f(X). Ası, existen x, y ∈ X tales que f(x) = a,f(y) = b. Como X es arcoconexo existe γ : [0, 1] → X tal que γ(0) =x, γ(1) = y. entonces f ◦ γ es continua y es una trayectoria que une a con b.
Corolario 1.6.1. Dados dos espacios topologicos homeomorfos X y Y , Xes arcoconexo si y solo si Y es arcoconexo.
Este no es el concepto mas general de que un espacio sea de una solapieza, a continuacion veamos este y cual es su relacion con arcoconexidad.

24 CAPITULO 1. PRELIMINARES
Definicion 1.6.1. Sea (X,T ) un espacio topologico. Diremos que X es dis-
conexo si existen conjuntos abiertos U, V ∈ T tales que
U ∪ V = X U ∩ V = ∅.
Diremos que (X,T ) es conexo si no es disconexo.
Diremos que un subconjunto de un espacio topologico es conexo, si lo escomo espacio topologico con la topologıa relativa.
La definicion de conexo, dada en el sentido negativo, nos dice que unespacio topologico es de una sola pieza en el sentido de que no se puedeseparar por abiertos ajenos.
Ahora, en efecto, la conexidad se preserva por continuidad.
Teorema 1.7. Sea X conexo. f : X → Y continua. Entonces f(X) esconexo.
Demostracion. Sin perdida de generalidad, supongamos que f es suprayec-tiva.
Sean U, V abiertos de Y , con Y = U ∪ V , U ∩ V = ∅, si hacemosU ′ = f−1(U) y V ′ = f−1(V ) entonces U ′, V ′ son abiertos de X tales queU ′ ∪ V ′ = X y U ′ ∩ V ′ = ∅ por lo que uno de ellos es vacıo, digamos V ′ = ∅con lo cual V = ∅ y por lo tanto f(X) es conexo.
Corolario 1.7.1. Sean X, Y homemorfos. X es conexo si y solo si Y lo es.
Veamos algunas equivalencias las cuales las podemos encontrar en [1],pagina 108.
Teorema 1.8. Sea (X,T ) un espacio topologico, los siguientes enunciadosson equivalentes:
1. X es conexo.
2. No existen cerrados ajenos U, V tales que U ∪ V = X, U ∩ V = ∅.
3. No existen conjuntos U, V no vacıos tales que U ∪ V = X con(clU ∩ V ) ∪ (U ∩ clV ) = ∅.
4. No existe una funcion f : X → {0, 1} continua y suprayectiva({0, 1}con la topologıa discreta).

1.2. TOPOLOGICOS 25
5. Los unicos subconjuntos de X abiertos y cerrados a la vez, son ∅ y X.
El concepto que hemos definido anteriormente para decir que un espacioes de una sola pieza es el de arcoconexidad, veamos que la conexidad seobtiene de esta. Mas en concreto tenemos el siguiente teorema.
Teorema 1.9. Si (X,T ) un espacio topologico arcoconexo, entonces X esconexo.
Demostracion. Supongamos que X es arcoconexo, pero no conexo. En estascondiciones existe un subconjunto propio de X, abierto y cerrado, digamosA. Sea a ∈ A y b ∈ X\A, y γ : [0, 1] → X continua, con γ(0) = a y γ(1) = b,luego por continuidad, γ−1(A) es abierto, cerrado y es un subconjunto propiode [0, 1] ya que 1 /∈ γ−1(A), de esto tenemos [0, 1], es disconexo, lo cual esuna contradiccion pues [0, 1] es
El recıproco no es valido como lo muestra el siguiente ejemplo
Ejemplo 1.15. El peine y el piojo.Sea
B = {(x, y) ∈ R2 : x =1
n, 0 ≤ y ≤ 1, Para algun n ∈ N}∪{0 ≤ x ≤ 1, y = 0}
El peine, y sea
A = {(0, 1)}
El piojo.El espacio es conexo, pues el peine es arcoconexo, y cualquier bola que
encierre al piojo, debe intersectar al peine, esto porque la sucesion { 1n}∞n=1
converge decrecientemente a 0.Por el contrario, el espacio no es arcoconexo pues cualquier arco que
comience en el piojo no puede cruzar al peine.
Aunque no todo conexo X es arcoconexo, hay un recıproco parcial al teo-rema 1.9, si suponemos hipotesis adicionales sobre el espacio X, en particulartenemos el siguiente teorema para subconjuntos de Rn.
Teorema 1.10. Todo subespacio conexo y abierto de Rn es arcoconexo.
Demostracion. En [1], pagina 116.

26 CAPITULO 1. PRELIMINARES
Figura 1.5: El peine y el piojo
Aunque un espacio no sea arcoconexo, veamos que podemos verlo comola union de conjuntos arcoconexos, aqui tenemos el concepto
Definicion 1.10.1. Sea X un espacio topologico y sean x, y ∈ X. Decimosque x ∼ y si existe una trayectoria γ que una a x con y.
Proposicion 1.10.1. ∼ es una relacion de equivalencia en X.
Demostracion. Probaremos que ∼ es reflexiva, simetrica y transitiva.Reflexividad. Sea x ∼ y, esto es, existe una trayectoria γ : I → X talque γ(0) = x y γ(1) = y. Sea β : I → X definida por β(t) = γ(1 − t).Tenemos que β es continua, β(0) = y y β(1) = x por lo que y ∼ x.
Simetrıa. Sea x ∈ X y γ : I → X definida por γ(t) = x para todo t ∈ I,obtenemos que γ es continua y γ(0) = γ(1) = x por lo tanto x ∼ x.
Transitividad. Sea x ∼ y y y ∼ z, esto es, existen α, β : I → X talesque α(0) = x, α(1) = y, β(0) = y y β(1) = z, definimos γ : I → X por
γ(t) =
{α(2t) 0 ≤ t ≤ 1/2]
β(2t− 1) 1/2 ≤ t ≤ 1
entonces γ es continua, γ(0) = xyγ(1) = z. Por lo tanto x ∼ z.
Las clases de equivalencia de esta relacion reciben el nombre de compo-nentes arcoconexas de X. Estas seran importantes en el proximo capıtulo

1.2. TOPOLOGICOS 27
pues lo que pase en terminos de homologıa en un espacio X estara deter-minado por lo que pase en las componentes arcoconexas de X, cosa queprecisaremos en el capıtulo 2.

28 CAPITULO 1. PRELIMINARES

Capıtulo 2
Geometrıa Afın y Homologıa
singular
2.1. Geometrıa Afın
2.1.1. Espacio Afın
A lo largo de la tesis estaremos usando conceptos de geometrıa afin, porlo que en este momento vamos a definirlos.
Estos pueden darse en lo abstracto, mas precisamente usando accionesde grupos. En contexto de las acciones de grupo se define un espacio afın dedimension n como un conjunto M donde el grupo aditivo de Rn actua librey transitivamente. Sin embargo, definiremos espacio afın de una manera quepodamos verlo como un subconjunto de Rn, esto para trabajar en un terrenomas familiar y no meternos de lleno en otra terminolgıa. Las propiedades deespacio afın con acciones de grupo las podemos encontrar en [4], pagina 36.
Definicion 2.0.2. Sea M ⊂ Rm, diremos que M es un espacio afın, sidados x, y ∈M la recta que pasa por x y y esta contenida en M , esto es,
tx+ (1 − t)y ∈M Para cada t ∈ R
Ejemplo 2.1. Sea M un subespacio vectorial de Rm entonces M es afin.
Definicion 2.0.3. Sea M ⊂ Rm, decimos que M es un conjunto convexo
si dados x, y ∈M el segmento que une x con y esta contenido en M , esto es,
tx+ (1 − t)y ∈M ∀t ∈ [0, 1]
29

30 CAPITULO 2. GEOMETRIA AFIN Y HOMOLOGIA SINGULAR
Figura 2.1: Convexidad
Podemos ver de la definicion que todo espacio afın es convexo, mas nonecesariamente todo convexo es afın. Es facil ver que la interseccion de espa-cios afines (o convexos) es un espacio afın ( convexa) respectivamente.
En nuestras definiciones de espacio afın y conjunto convexo dimos lacondicion para dos puntos, veamos que en general esto se vale para cualquiernumero de puntos.
Teorema 2.1. Sea M un espacio afın y p0, p1, . . . pr ∈ M , ademas sean
a0, a1, . . . ar ∈ R tales quer∑
i=0
ai = 1. Entoncesr∑
i=0
aipi ∈M
Ademas, el resultado es cierto para conjuntos convexos con la hıpotesisadicional ai ≥ 0 para cada i con 0 ≤ i ≤ r
Demostracion. Por induccion sobre el numero de sumandos.veamos el caso afınSea r = 1 por definicion a0p0 + a1p1 ∈MSupongamos que se vale para r sumandos, sean, p0, p1, . . . , pr ∈M y
a0, a1, . . . ar ∈ R conr∑
i=0
ai = 1, sea ak distinta de 1, de aquı∑i6=k
ai = 1 − ak,
por lo que∑i6=k
ai
1−ak= 1, por hipotesis de induccion tenemos
∑i6=k
ai
1−akpi ∈M
como ak + (1− ak) = 1 tenemos (1− ak)
(∑i6=k
ai
1−akaipi
)+ akpk ∈M pero
(1 − ak)
(∑i6=k
ai
1−akaipi
)+ akpk =
r∑i=0
aipi que es lo que queriamos de-
mostrar.

2.1. GEOMETRIA AFIN 31
Para el caso convexo, si algun ak = 1 entonces todos los demas son igualesa 0 y
∑aipi = pk ∈M por hipotesis, supongamos que ak 6= 1 para algun k y
de esta forma 1 − ak > 0 y podemos hacer lo mismo que en el caso afın.
Las expresiones∑aipi seran llamadas combinaciones lineales afines y
combinaciones lineales convexas, respectivamente, o simplemente combina-ciones afines y combinaciones convexas.
Sea A un subconjunto de M , definimos [A] como la interseccion de todoslos conjuntos convexos que contienen a A. Podemos ver del teorema 2.1 que[A] es el conjunto de combinaciones convexas de elementos de A.
Al conjunto [A] le llamamos la envolvente convexa de A. Cuando losescalares no necesariamente son positivos el conjunto es llamado el conjuntoafın generado por A pues en este caso coincide con la interseccion de todoslos conjuntos afines que contienen a A.
Dado A afın, o convexo, con p ∈ A buscamos representarlo adecuada-mente con un vector de coordenadas, y que esta representacion sea unicaveamos lo que necesitariamos para esto.
2.1.2. Independencia Afın
Definicion 2.1.1. Sea M un conjunto afın con p0, p1, . . . , pr ∈ M , decimosque p0, p1, . . . pr son afinmente independientes si los vectores p1 − p0,p2 − p0, . . . , pr − p0 son linealmente independientes.
De la definicion tenemos que un conjunto afın tiene a lo mas m+1 puntosafinmente independientes, sobre un espacio m dimensional. veamos ahora queesta condicion es lo que necesitamos para la unicidad en las coordenadas.
Teorema 2.2. Sea M espacio afın, con {p0, p1, . . . , pr} ⊂ M , los siguientesson equivalentes
1. p0, p1, . . . , pr son afınmente independientes.
2. Cuando s0, s1, . . . , sr satisfacen la condicionr∑
i=0
sipi = 0 conr∑
i=0
si = 0,
entonces si = 0 con 0 ≤ i ≤ r
3. si x esta en el conjunto afın generado por p0, p1, . . . , pr, entonces x seexpresa de manera unica como combinacion afın de p0, p1, . . . , pr

32 CAPITULO 2. GEOMETRIA AFIN Y HOMOLOGIA SINGULAR
Demostracion. (1) → (2)
Sean s0, s1, . . . , sr conr∑
i=0
sipi = 0 yr∑
i=0
si = 0, de aquı tenemos que
0 =
r∑
i=0
sipi
=r∑
i=0
sipi − 0p0
=r∑
i=0
sipi −
(r∑
i=0
si
)po
=
r∑
i=1
si(pi − p0)
Pero (pi − p0)ri=1 son linealmente independientes. Entonces si = 0 para
toda i
(2) → (3)
Sea x =r∑
i=0
aipi =r∑
i=0
bipi, conr∑
i=0
ai = 1,r∑
i=0
bi = 1, de aquı
r∑
i=0
(ai − bi) = 1 − 1 = 0
entonces x− x = 0 =r∑
i=0
(ai − bi)pi, de (2) tenemos ai − bi = 0 para toda i
entonces ai = bi(3) → (1)
Basta ver que si p0, p1, . . . , pr son afinmente dependientes entonces dadauna representacion podemos contruir otra distinta.
Sean p1−p0, p2−p0, . . . pr−p0 vectores linealmente dependientes, entonces
existen α1, α2, . . . , αr no todos 0, digamos, ak 6= 0, tales quer∑
i=1
αi(pi−p0) = 0
entonces
0 = α1p1 + α2p2 + · · · + αrpr − (α1 + α2 + · · · + αr)p0

2.1. GEOMETRIA AFIN 33
Sea x =r∑
i=0
aipi entonces
x = x+0 = x =
r∑
i=0
aipi +
r∑
i=1
αi(pi −p0) = (a0 − (
r∑
i=1
αi))p0 +
r∑
i=1
(ai +αi)pi
como αk es distinto de 0, entonces x tiene dos representaciones distintas.
Con esto vemos que una condicion necesaria y suficiente para que lascoordenadas sean unicas, es que los puntos sean afinmente independientes.
Definicion 2.2.1. Sean p0, p1, . . . , pr puntos afinmente independientes, enun espacio afın E, El conjunto de todas las combinaciones afines es llamadoel espacio generado por p0, p1, . . . pr, y es denotado por span(p0, p1, . . . , pr).
De la teorema 2.2 vemos que cada p ∈ span(p0, p1, . . . , pr) tiene una ex-presion unica
p = a0p0 + a1p1 + · · ·+ arpr (2.1)
Tal quer∑
i=0
ai = 1.
El vector de coordenadas (a0, a1, . . . , ar) es llamado el vector de coorde-nadas baricentricas de p con respecto a {p0, p1, . . . pr}.
Estas coordenadas son arbitrarias salvo por la condicionr∑
i=0
ai = 1. a0, a1, . . . ar en la ecuacion 2.1 son llamadas las coordenadas bar-
icentricas de p con respecto a {p0, p1, . . . pr}.
Definicion 2.2.2. Sea M un espacio afın y {p0, p1, . . . pr} puntos afınmenteindependientes en M . El punto p ∈M de coordenadas baricentricas ( 1
r+1, 1
r+1, . . . , 1
r+1)
es llamado el baricentro del conjunto {p0, p1, . . . pr}.
Para r = 1 el baricentro de {p0, p1} es el punto medio del segmentoque une p0 con p1, para r = 2 es el punto donde se cruzan las medianas eltriangulo con vertices {p0, p1, p2} y ası extensiones a otras dimensiones.
Un caso muy importante sera precisamente [p0, p1, . . . , pr]. Este es el sub-conjunto con coordenadas baricentricas positivas de span{p0, . . . pr}. Esteconjunto es convexo por el teorema 2.1, por lo que recibira un nombre espe-cial.

34 CAPITULO 2. GEOMETRIA AFIN Y HOMOLOGIA SINGULAR
Definicion 2.2.3. Dados p0, p1, . . . , pr puntos afinmente independientes, elsubconjunto de span(p0, p1, . . . , pr) de todos los puntos con coordenadas bar-icentricas positivas es llamado simplejo geometrico r-dimensional generadopor p0, p1, . . . , pr.
En ocaciones diremos simplemente r-simplejo geometrico. Un 0-simplejoresulta ser un punto, un 1 simplejo resulta ser un segmento, un 2-simplejo re-sulta ser un triangulo, un 3-simplejo resulta ser un tetraedro y ası extensionesa otras dimensiones, ver figura 2.2.
Figura 2.2: Simplejos Geometricos
2.1.3. Transformaciones afines
Sean E,E ′ espacios afines y f : E → E ′. Buscamos definir las propiedadesque debe de cumplir f para conservar la estructura afın de f(E). El conceptoes el siguiente.
Definicion 2.2.4. Dados E,E ′ espacios afines, f : E → E ′, decimos que fes una transformacion afın, si dados p, q ∈ E, y t ∈ R, tenemos que
f(tp+ (1 − t)q) = tf(p) + (1 − t)f(q)
para todo t ∈ R
Si f(p) 6= f(q) , una transformacion afın manda la recta que pasa por py q en la recta que pasa por f(p) y f(q).

2.1. GEOMETRIA AFIN 35
Teorema 2.3. Sean f : E → E ′ una transformacion afın, r ∈ N
p0, p1, p2, . . . , pr ∈ E y a0, a1, . . . , ar ∈ R tales quer∑
i=0
ai = 1, entonces
f
(r∑
i=0
aipi
)=
r∑
i=0
aif(pi)
Demostracion. Por induccion sobre r. Sea r = 1, p0, p1 ∈ E y a0, a1 ∈ R
tales que a0 + a1 = 1, tenemos que a1 = 1 − a0, por lo tanto,
f(a0p0+a1p1) = f(a0p0+(1−a0)p1) = a0f(p0)+(1−a0)f(p0) = a0f(p0)+a1f(p1)
.Supongamos que es valido para cada natural menor que r con r > 1. Sean
a0, a1, . . . , ar ∈ R tales que∑ai = 1. Alguno de los {ai}
ri=0 es distinto de 1,
pues si todos fueran iguales a 1, tendriamos que∑ai = r > 1 lo cual no es
posible. Supongamos que ak 6= 1, entonces∑i6=k
ai = 1 − ak, de aquı que∑i6=k
ai
1−ak= 1.
Por hipotesis de induccion tenemos que
f
(∑
i6=k
ai
1 − akpi
)=∑
i6=k
ai
1 − akf(pi)
Ademas, ak + (1 − ak)=1, de lo cual obtenemos lo siguiente
f
(r∑
i=0
aipi
)= f
(akpk + (1 − ak)
∑
i6=k
(fracai1 − ak) pi
)
= (1 − ak)f
(∑
i6=k
(ai
1 − ak
)pi
)+ akf(pk)
= (1 − ak)
(∑
i6=k
(ai
1 − ak
)f(pi)
)+ akf(pk)
=∑
i6=k
aif(pk) + akf(pk)
=r∑
i=0
aif(pi)

36 CAPITULO 2. GEOMETRIA AFIN Y HOMOLOGIA SINGULAR
Con el teorema 2.3 vemos que una transformacion afın uno a uno mandarectas en rectas, planos en planos, etc; conservando sus coordenadas bar-icentricas. Si la transformacion afın no es uno a uno no podemos aseguraresto, en el sentido de que un plano se puede deformar a una recta o inclusoa un punto. Por por ejemplo si
f(p) = 0 para cada p ∈ E
La imagen de un espacio afın es un espacio afın, pues la condicion sobrela preimagen de dos puntos y el hecho de que f respeta estos coeficientes essuficiente para esto.
Sea f : Rn → Rn una transformacion lineal y E,E ′ ⊂ Rn espacios afines,si fijamos un punto O ∈ E y O′ ∈ E ′ (O ni O′ son necesariamente el origen)podemos construir una transformacion afın f a partir de f tal que f(O) = O′.Ası mismo, dada una transformacion afın f podemos construir una transfor-macion lineal que corresponda a f . La forma de construirla esta dada en elsiguiente teorema.
Teorema 2.4. Sea f : Rm → Rm una transformacion lineal, y seanE,E ′ ⊂ Rm espacios afines, entonces tenemos que la funcion f : E → E ′
definida porf(p) = O′ + f(p−O)
es afın.De manera recıproca, para cada transformacion afın f : E → E ′ tal que
f(O) = O′, tenemos que f esta determinada por la ecuacion
f(p− O) = f(p) − f(O)
Demostracion. Dada f una transformacion lineal, veamos que f es una trans-formacion afın.
f(tp+ (1 − t)q)
= O′ + f(tp + (1 − t)q − O)
= O′ + tf(p) + (1 − t)f(q) − f(O)
= tO′ + (1 − t)O′ + tf(p) + (1 − t)f(q) − tf(O) − (1 − t)f(O)
= t(O′ + f(p) − f(O)) + (1 − t)(O′ + f(q) − f(O))
= t(O′ + f(p−O)) + (1 − t)(O′ + f(q − O))

2.1. GEOMETRIA AFIN 37
Por lo que f : E → E ′ es afın.Para f : E → E ′ transformacion afın, demostraremos ahora que f esta de-
terminada por f(p− O) = f(p) − f(O).veamos que f definida de esta manera es lineal.Sean
S = {p− O : p ∈ E}
S ′ = {p′ − O : p′ ∈ E ′}
Veamos que S, S ′ son subespacios vectoriales de Rn
Para p1, p2 ∈ E tenemos p1 + p2 − O ∈ E pues 1 + 1 − 1 = 1, de estodeducimos que
(p1 + p2 − O) − O ∈ S.Para r ∈ R tenemos rp+O − rO ∈ E pues r + 1 − r = 1. De esta forma
(rp+O − rO) − O = r(p− O) ∈ S
analogamente para S ′.
f : S → S ′
Sean p1−O, p2−O ∈ S y r ∈ R tenemos p1, p2 ∈ E por lo que p1+p2−O ∈ E.Ahora
f((p1 − O) + (p2 − O)) = f(p1 − O + p2) − f(O)
= f(p1) − f(O) + f(p2) − f(O)
= f(p1 − O) + f(p2 − O)
f(r(p− O)) = f(rp+ (1 − r)O) − f(O)
= rf(p) + (1 − r)f(O) − f(O)
= r(f(p) − f(O))
= rf(p−O)
Solo falta ver que f proviene de f .Sea g : E → E ′ dada por
g(p) = O′ + f(p− O)

38 CAPITULO 2. GEOMETRIA AFIN Y HOMOLOGIA SINGULAR
Queremos ver que f = g, de la definicion de f tenemos
g(p) = O′ + (f(p) − f(O))
como f(O) = O′ tenemos que f(p) = g(p) para todo p ∈ E.
De esta forma un transformacion afın es una transformacion lineal seguidade una traslacion.
Sea p0, p1, . . . pn ∈ E puntos afinmente independientes que generan E(notese que E ⊂ Rn, por lo que {p1 − p0, p2 − p0, . . . , pn − p0} es una basepara Rn como espacio vectorial) una transformacion afın esta unicamentedeterminado por el efecto en estos puntos, pues por linealidad, si p ∈ E,entonces existen escalares a0, . . . , an, con
∑ai = 1 y
f(p) = f
(n∑
i=0
aipi
)n∑
i=0
aif(pi)
Recıprocamente si tenemos q0, q1, . . . , qn ∈ E ′ entonces existe un unico trans-formacion afın f tal que f(pi) = qi para toda i.
2.1.4. Simplejos Singulares
Sea R∞ el producto cartesiano de R sobre si mismo sobre los naturales,esto es, el espacio de sucesiones reales. Este resulta ser un espacio vectorial,con las operaciones componente a componente, y un espacio topologico conla topologıa producto; en este espacio consideremos los vectores
e0 = (0, 0, 0, . . . , 0, . . . )
e1 = (1, 0, 0, . . . , 0, . . . )
e2 = (0, 1, 0, . . . , 0, . . . )...
Mas en especıfico, el conjunto {e0, e1, . . . ek, . . . } esta definido de tal formaque ek es la sucesion ek = (δnk)
∞n=1 donde δnk es la delta de Kronecker, esto
es
δnk =
{1 n = k0 n 6= k

2.1. GEOMETRIA AFIN 39
En R∞ Podemos identificar Rn como el subespacio que tiene todas suscomponentes despues de la n-esima iguales a 0, es decir, el subespaciogenerado por {ei}
ni=1.
Definicion 2.4.1. Sea q ≥ 0. Llamaremos q-simplejo geometrico es-
tandar al q-simplejo geometrico generado por {e0, e1, . . . , eq}. Lo denotare-mos por ∆q.
Figura 2.3: Simplejo estandar
Consideramos R∞ para tener a los simplejos de todos los ordenes comosubconjuntos de un mismo espacio.
Definicion 2.4.2. Sea E un espacio afın y p0, p1, . . . pq ∈ E. (p0, p1, . . . , pq)denotara la restriccion a ∆q de la unica transformacion afın f : Rq → E talque f(e0) = p0, f(e1) = p1, . . . , f(eq) = pq De aquı que (e0, e1, . . . , eq) es lafuncion identidad de ∆q en ∆q, que denotaremos de ahora en adelante comoδq.
Definicion 2.4.3. Dado un espacio topologico X, un q-simplejo singular enX es una funcion continua σ : ∆q → X
Con esto un 0-simplejo lo podemos asociar a un punto, un 1-simplejo a unarco, un 2-simplejo a una deformacion de un triangulo, y ası sucesivamenteextensiones a otras dimensiones.
Notese que estamos definiendo un simplejo singular como una funcion yno como la imagen de puntos que toma la funcion. Ademas, la imagen depuntos que toma la funcion no tiene porque verse como un simplejo, ni tieneporque ser homeomorfo a ∆q, ya que puede deformarse, incluso a un punto,de ahı el nombre de simplejo singular.
Ejemplo 2.2. Sea E un espacio afın y p0, p1, . . . pq ∈ E, tenemos que latransformacion afın (p0, p1, . . . pq) resulta ser un q-simplejo singular en unespacio afın E.

40 CAPITULO 2. GEOMETRIA AFIN Y HOMOLOGIA SINGULAR
Definicion 2.4.4. Sea X un espacio topologico fijo. Fq(X) sera el conjuntode q-simplejos singulares de X, esto es
Fq(X) = {σ : ∆q → X : σ es continua}
Notemos que para cada espacio topologico X, Fq(X) es no vacıo puescontiene al menos a todas las funciones constantes de ∆q en X.
Queremos construir un espacio de q-simplejos, que tenga propiedades al-gebraicas interesantes, pero a simple vista no tenemos una operacion naturalentre simplejos, por lo que definimos esta operacion formalmente, asi comoun producto por elementos de un anillo, esto lo haremos como vimos en elcapıtulo 1, ademas lo haremos con escalares sobre un anillo arbitrario, puesla teorıa no se hace mas ni menos complicada en base a esto; para propositosde aplicacion destacan los casos R = Z,R o C.
Definicion 2.4.5. Sea X un espacio topologico y R un anillo conmutativocon 1, Definimos Sq(X;R) como el modulo libre generado por el conjuntoFq(X), esto es, Sq(X;R) es el conjunto de sumas formales finitas de pro-ductos por escalares en R, de q-simplejos singulares.
Hemos la convencion de que denotar Sq(X,R) simplemente como Sq(X)si trabajamos con un anillo fijo R.
Un elemento c ∈ Sq se ve de la forma
c = v1σ1 + v2σ2 + · · ·+ vkσk
donde σ1, . . . , σk son q-simplejos singulares y v1, . . . , vk son elementos de R;esto lo denotaremos por comodidad como
c =∑
σ
vσσ
Los elementos de Sq(X) seran llamados q-cadenas singulares de X.
Por como lo hemos definido, el espacio Sq(X) es mu grande, pues el con-junto de funciones continuas de ∆q a X, por lo general, es muy grande, paraempezar tenemos a todas las funciones constantes, por lo que construiremosun espacio a partir de Sq(X) que sea mas facil de estudiar.

2.1. GEOMETRIA AFIN 41
2.1.5. Operador frontera
Para q > 0 definimos F iq : ∆q−1 → ∆q, para 0 ≤ i ≤ q, como la transfor-
macion afın
(e0, . . . , ei, . . . eq)
donde ei denota que omitimos ei, en otras palabras,
F iq(ej) =
{ej j < iej+1 j ≥ i
Podemos ver que F iq mapea ∆q−1 continua y afınmente sobre la cara de
∆q opuesta al vertice ei, esto lo ilustramos para q = 2 en la figura ??.
Figura 2.4: Caras de δ2
Definicion 2.4.6. Para un q-simplejo singular σ en un espacio X, definimosla i-esima cara de σ como el (q − 1)-simplejo σ ◦ F i
q , y la denotaremos por
σ(i).
Ejemplo 2.3. De la definicion de F iq tenemos que cuando σ = δq, F
iq es la
i-esima cara de δq, esto es, δ(i)q = F i
q .
Ejemplo 2.4. Cuando σ = (p0, p1, . . . , pq) con p0, . . . , pq ∈ X, con X espacioafın, entonces
σ(i) = (p0, . . . , pi, . . . , pq)
Ahora definiremos la frontera de un q-simplejo

42 CAPITULO 2. GEOMETRIA AFIN Y HOMOLOGIA SINGULAR
Figura 2.5: Ejemplos de Fronteras
Definicion 2.4.7. Sea q > 0, σ un q-simplejo singular. La frontera de σ,denotada por ∂(σ), es la (q − 1)-cadena
∂(σ) =
q∑
i=0
(−1)iσ(i)
Si q = 0 definimos la frontera de un 0-simplejo como 0.
Como trabajaremos con distintas q, en ocasiones denotaremos a ∂ como∂q para indicar que ∂q manda un q-simplejo a su frontera. Notese que tenemosdefinida ∂q para toda q ≥ 0.
Podemos ver en la figura 2.5 que ∂(δ2) es la suma de las aristas deltriangulo con signos escogidos para que empiece en e0 y recorra los verticesen sentido creciente hasta volver a e0, sin embargo, ∂(δ2) no es un arco, sinouna suma formal de 1-simplejos, tenemos que tener cuidado, pues esta noes la frontera topologica, sino una funcion de Fq en Sq−1(X), siendo ası denaturaleza distinta.
Ejemplo 2.5. Cuando σ = (p0, p1, . . . , pq), con p0, p1, . . . , pq ∈ E, E espacioafın, tenemos que
∂(σ) =
q∑
i=0
(−1)i(p0, . . . , pi, . . . , pq)
extendemos ∂, a un homomorfismo de modulos Sq(X) → Sq−1(X) porlinealidad, esto es
∂(∑
σ
vσσ) =∑
σ
vσ∂(σ)

2.1. GEOMETRIA AFIN 43
para q = 0 tenemos de nuevo ∂0(c) = 0 para cada 0-cadena c, puestendremos una suma finita de 0’s, esto es, ∂0 es la funcion constante 0 deS0(X) al modulo trivial {0}, o dicho de otra forma, estamos definiendoS−1(X) = {0}.
Antes de continuar veamos un resultado tecnico.
Lema 2.4.1. Sean q, i, j enteros tales que 0 ≤ j < i ≤ q, entonces
F iq ◦ F
jq−1 = F j
q ◦ F i−1q−1 (2.2)
Donde
F jq−1, F
i−1q−1 : ∆q−2 → ∆q−1
F iq , F
jq : ∆q−1 → ∆q
Demostracion.
F iq ◦ F
jq−1 : ∆q−2 → ∆q
F jq ◦ F i−1
q−1 : ∆q−2 → ∆q
Veamoslo por casos
Caso 1 Sea k < j < i < q, de esto se sigue que
F iqF
jq−1(ek) = F i
q(ek) = ek,
como k < j ≤ i− 1 se tiene que
F jqF
i−1q−1(ek) = F j
q (ek) = ek.
Caso 2 Sea k = j < i− 1 luego
F iqF
jq−1(ek) = F i
q(ek+1) = ek+1,
ya que k + 1 < i.
Por otro ladoF j
qFi−1q−1(ek) = F j
q (ek) = ek+1,
ya que j = k

44 CAPITULO 2. GEOMETRIA AFIN Y HOMOLOGIA SINGULAR
Caso 3 Sea k = j = i− 1 luego
F iqF
jq−1(ek) = F i
q(ek+1) = ek+2.
Por otro ladoF j
qFi−1q−1(ek) = F j
q (ek+1) = ek+2,
pues j + 1 = i
Caso 4 Sea j < k = i− 1 luego
F iqF
jq−1(ek) = F i
q(ek+1) = ek+2.
Por otro ladoF j
qFi−1q−1(ek) = F j
q (ek+1) = ek+2.
Caso 5 Sea j < i ≤ k luego
F iqF
jq−1(ek) = F i
q(ek+1) = ek+2.
Por otro ladoF j
qFi−1q−1(ek) = F j
q (ek+1) = ek+2.
con lo cual cubrimos todos los casos y por lo tanto
F iq ◦ F
jq−1(ek) = F j
q ◦ F i−1q−1(ek),
para k = 0, 1, . . . , q − 1.Por linealidad obtenemos la igualdad para cada p ∈ ∆q−2
Para ahorrar notacion hacemos la siguiente convencion: denotaremos lacomposicion de dos funciones f y g como fg, a menos que esto se preste aconfusion, en cuyo caso la denotaremos como habitualmente lo hacemos, estoes, f ◦ g.
Con esto ya podemos probar el siguiente teorema que resultara indispen-sable para definir la homologıa.
Teorema 2.5. Sea X espacio topologico, c ∈ Sq(X), entonces
∂∂(c) = 0 (2.3)

2.1. GEOMETRIA AFIN 45
Demostracion. Es suficiente verificar que ∂q−1∂q(σ) = 0 para σ un q-simplejosingular, de nuevo, por linealidad se extendera la igualdad a todo elementode Sq(X).
∂(∂σ) = ∂
(q∑
i=0
(−1)iσ(i)
)
=
q∑
i=0
(−1)i(∂σ(i)
)
=
q∑
i=0
(−1)i
(q−1∑
j=0
(−1)j[(σ ◦ F i
q) ◦ Fjq−1
])
=
q∑
i=0
q−1∑
j=0
(−1)i+j[(σ ◦ F i
q) ◦ Fjq−1
]
=
q∑
i=0
q−1∑
j=0
(−1)i+j[σ ◦ (F i
q ◦ Fjq−1)
]
Ahora, podemos separar esta suma en dos partes, sumar primero los terminosdonde j < i, y luego los terminos donde i ≤ j, esto para cada sumando con0 ≤ i ≤ q, 0 ≤ j ≤ q − 1. De esta forma tendriamos
∂(∂σ) =
q∑
j<i=1
(−1)i+j[(σ ◦ F i
q) ◦ Fjq−1
]
+
q−1∑
0=i≤j
(−1)i+j[(σ ◦ F i
q) ◦ Fjq−1
]
=
q∑
j<i=1
(−1)i+jσ ◦[F i
q ◦ Fjq−1
]
+
q−1∑
0=i≤j
(−1)i+jσ ◦[F i
q ◦ Fjq−1
]

46 CAPITULO 2. GEOMETRIA AFIN Y HOMOLOGIA SINGULAR
Por el lema 2.4.1 tenemos
∂(∂σ) =
q∑
j<i=1
(−1)i+jσ ◦[F j
q ◦ F i−1q−1
]
+
q−1∑
0=i≤j
(−1)i+jσ ◦[F i
q ◦ Fjq−1
](2.4)
La primera suma, originalmente se realiza sobre el siguiente conjunto depares
{(i, j) : 1 ≤ i ≤ q, 0 ≤ j ≤ q − 1, j < i}
Ahora, si renombramos las variables i′ = j, j′ = i − 1 en la primera sumatenemos que la suma serıa sobre todos los indices donde i′ < j′ + 1 desdej′ + 1 = 1 hasta j′ + 1 = q, esto es, la suma se realizarıa sobre el conjunto depares
{(i′, j′) : 0 ≤ i ≤ q − 1, 0 ≤ j′ ≤ q − 1, i′ ≤ j′}
Que es equivalente a sumar todos los terminos que cumplan i′ ≤ j′, desdei′ = 0 hasta i′ = q − 1
Ahora, cada uno de los sumandos de la primera suma, con el cambio deındices quedarıan de la siguiente forma
(−1)i+jσ ◦(F j
qFi−1q−1
)= (−1)(i′+j′−1)σ ◦
(F i′
q Fj′
q−1
)
Aplicando a la ecuacion 2.4 tenemos que
∂(∂σ) =
q∑
j<i=1
(−1)i+jσ ◦[F j
q ◦ F i−1q−1
]
+
q−1∑
0=i≤j
(−1)i+jσ ◦[F i
q ◦ Fjq−1
]
=
q−1∑
0=i′≤j′
(−1)i‘+j′−1σ ◦[F i′
q ◦ F j′
q−1
]
+
q−1∑
0=i≤j
(−1)i+jσ ◦[F i
q ◦ Fjq−1
]
= 0
Pues cada uno de los sumando de la primera suma se anula con cada uno delos sumando de la segunda suma.

2.1. GEOMETRIA AFIN 47
2.1.6. Ciclos y fronteras
Veamos lo que tenemos hasta ahora, dado un espacio topologico X, paracada q ≥ 0 hemos construido un modulo libre Sq(X). Ademas, hemos cons-truido un homomorfismo de modulos ∂q : Sq(X) → Sq−1(X). De maneraque ∂∂ = 0. Esto podemos verlo de la siguiente forma, tenemos el siguientediagrama
. . .∂
−→Sq+1(X)∂
−→Sq(X)∂
−→Sq−1(X)∂
−→ . . .∂
−→S0(X)∂
−→0
con la condicion ∂q−1∂q = 0 para cada q > 0. Esto implica que
Im ∂q+1 ⊂ ker ∂q
Definicion 2.5.1. Sea c ∈ Sq(X), diremos que c es un q-ciclo si ∂c = 0.Diremos que c es una q-frontera si existe d ∈ Sq+1(X) tal que ∂d = c, doscadenas cuya diferencia es una frontera seran llamadas homologas.
Al conjunto de q-ciclos lo denotaremos como Zq(X;R) mientras que alconjunto de fronteras lo denotaremos por Bq(X;R).
Denotaremos Zq(X;R) y Bq(X;R) simplemente por Zq(X) y Bq(X) sitrabajamos con un anillo R fijo.
Es claro que Bq(X) y Zq(X) son submodulos de Sq(X) pues
Zq(X) = ker ∂q
Bq(X) = Im ∂q+1
Ademas, por la condicion ∂∂ = 0 tenemos que el conjunto de q-fronteras essubmodulo del conjunto de q-ciclos, esto es, Bq(X) ≤ Zq(X).
El termino ciclo esta inspirado en el caso q = 1, paraR = Z, una cadena esun cıclo si representa una curva, o un conjunto de curvas que eventualmentese cierran.
Decimos representan porque no tiene que darse la igualdad, solo el hechode que sean homologas a dichas curvas, pasa algo analogo con q = 2 pero consuperficies cerradas, para q ≥ 3 no podemos verlo dentro de R3.
El termino frontera esta inspirado en el hecho de que un simplejo esfrontera si encierra una region dentro de el, para q = 1 la figura 2.6
muestra un cıclo que no es frontera para X = S1 × S1, el toro.Para q = 2 podemos pensar en fronteras como superficies encerrando
regiones solidas, pero de nuevo no podemos ver que pasa para q ≥ 3 dentrode R3.

48 CAPITULO 2. GEOMETRIA AFIN Y HOMOLOGIA SINGULAR
Figura 2.6: i y j representan cıclos que no son fronteras
Esto de que no podamos verlo no es muy preciso, pues usando cocientespor ejemplo, podemos trabajar con estos objetos pero en general no tenemosuna vision 3-dimensional de Hq(X) para X arbitrario y q ≥ 3.
2.1.7. Homologıa
Definicion 2.5.2 (Homologıa). Sea X un espacio topologico, definimos elq-esimo modulo de homologıa de X sobre R como
Zq(X;R)/Bq(X;R)
Lo denotaremos Hq(X;R). llamaremos homologıa del espacio X a la sucesion{Hq(X;R)}∞q=0.
Seguimos con la convencion de denotar Hq(X;R) por Hq(X) para unanillo fijo R.
Cuando tenemos un espacio topologico X, diremos que calculamos lahomologıa de X si hemos identificado cada modulo Hq(X) con algun moduloconocido.
Ejemplo 2.6. Sea (X,T ) un espacio topologico de un punto, esto es, X ={x} y T = {∅, {x}}.
Calcularemos la homologıa de {x}.Dado q existe un unico q-simplejo singular σq, la funcion constante, es
decir,
σq : ∆q → {x} σq(p) = x ∀p ∈ ∆q
de aquı tenemos que
Sq({x}) = {rσq : r ∈ R} ∼= R Como R-Modulo.

2.1. GEOMETRIA AFIN 49
No solo eso, sino que
∂(σq) =
q∑
i=0
(−1)iσq ◦ Fiq
pero σq ◦ Fiq es un (q − 1)-simplejo, por lo tanto σq ◦ F
iq = σq−1 y la frontera
de σq solo dependera de la paridad de q, esto es,
∂(σq) =
σq−1 q par > 00 q impar0 q = 0
con esto, cuando q > 0 tenemos
Zq(x) = Bq(x) =
{0 q par
Sq(x) q impar
ya con esto Hq(x) = 0 ∀q > 0.Ahora, Z0({x}) = S0({x}) ∼= R, mientras que B0({x}) ∼= 0 pues ∂(rσ1) =
r(σ0 − σ0) = 0, por lo tanto, H0(x) = R/0 ∼= R y el isomorfismo esta dadopor rσ0 → r
Cuando probemos el teorema de invarianza homotopica en el proximocapıtulo, estableceremos esta como la homologıa de muchos espacios conoci-dos, en particular, Rn.
2.1.8. Homologıa y Componentes Arcoconexas
En el capıtulo 1 definimos las componentes arcoconexas de un espaciotopologicoX como las clases de equivalencia de la relacion x ∼ y si existe unatrayectoria que une x con y. Si conocemos la homologıa en cada componentede X podemos calcular la homologıa de todo el espacio pero antes de esoveamos el siguiente resultado.
Lema 2.5.1. Sea X un espacio topologico arcoconexo y c ∈ S0(X) con c =∑i
aixi. Tenemos que c ∈ B0(X) si y solo si∑i
ai = 0
Demostracion. (⇒)Sea c = ∂d, d ∈ S1(X), sea
d = v1d1 + v2d2 + · · ·+ vndn

50 CAPITULO 2. GEOMETRIA AFIN Y HOMOLOGIA SINGULAR
con di 1-simplejos, entonces di es un arco entre dos puntos de X, digamos dex2i−1 a x2i
; con esto ∂(di) = x2i − x2i−1
de esta forma
∂(d) = c = (−v1x1+v1x2)+(−v2x3+v2x4)+(−v3x5+v3x6)+· · ·+(−vnx2n−1+vnx2n)
los puntos xk no tienen porque ser distintos, pero eso no importa, la sumade los coeficientes de c es entonces
(−v1 + v1) + (−v2 + v2) + (−v3 + v3) + · · ·+ (−vn + vn) = 0
(⇐)Sea c ∈ S0(X), con c = v1x1 + · · ·+ vnxn, con
n∑
i=1
vi = 0
, entonces 0 = 0x0 = (∑n
i=1 vi)x0, por lo que
c = c− 0 =∑
vixi −∑
vix0 = ∂(∑
viσxi
)
Ahora veamos como se comporta la homologıa sobre las componentesarcoconexas de X.
Teorema 2.6. Sean {Xi}i∈I la familia de componentes arcoconexas de X.Existe un isomorfismo canonico
Hq(X) ∼=⊕
i∈I
Hq(Xi) para cada q
Demostracion. Sea σ un q-simplejo. Por definicion tenemos σ : ∆q → X.Ahora, ∆q es arcoconexo, pues en particular es convexo. Como la imagencontinua de arcoconexo es arcoconexo, tenemos que σ manda ∆q en una delas componentes deX, entonces σ resulta ser un q-simplejo singular en algunade las componentes arcoconexas de X.
Veamos primero que Sq(X) ∼=⊕i
Sq(Xi).
Por linealidad, se induce un homomorfismo
f : Sq(X) →⊕
i
Sq(Xi)

2.1. GEOMETRIA AFIN 51
Donde mandamos cada σ a operar en su clase, esto es, si c ∈ Sq(X),ordenamos los simplejos de la descomposicion de c por clases de tal formaque
c =∑
i
ci,
Donde los simplejos de la descomposicion de ci operan sobre la compo-nente Xi, para cada i respectivamente.
Probaremos que f es inyectiva. Sea f(c) = 0, entonces c opera de maneranula sobre cada componente, es decir, c =
∑i
ci donde ci es un q-simplejo en
Xi y ademas ci = 0.de esta forma, c =
∑i
0 = 0, con esto, f es inyectiva.
Probaremos ahora que f es suprayectiva. Sea c ∈⊕i
Sq(Xi), entonces
c =∑i∈I
ci con ci ∈ Sq(Xi), todas iguales a 0 salvo un numero finito, entonces
c = f(∑ci), por lo tanto f es sobreyectiva. Notese que la primera suma es
la de la suma directa y la segunda la de la definicion de Sq(X).Con esto f es un isomorfismo de modulos y en efecto tenemos Sq(X) ∼=⊕
i
Sq(Xi).
queremos ver que Hq(X) ∼=⊕i
Hq(Xi) por lo que definiremos un homo-
morfismo ϕ : Hq(X) →⊕i
Hq(Xi)
Si σ : ∆q → Xk es un q-simplejo en X que opera sobre la componenteXk, con k ∈ I, σ ◦ F i
q : ∆q−1 → Xk, es decir, cada una de las caras de σopera sobre la misma componente, por lo que la frontera opera componentea componente.
Si Bq + c ∈ Hq(X), entonces c se descompone como c =∑i∈I
ci y podemos
definir
ϕ
(
Bq(X) +∑
i∈I
ci
)
=∑
i∈I
(Bq(Xi) + ci)
Veamos que esta bien definida, sean a + Bq(X) = b + Bq(X) entoncesa− b = ∂d con d ∈ Sq+1(X), ahora descomponemos a, byc en las cadenas queoperan en cada componente. Lo que tenemos es
a =∑
i
ai, b =∑
i
bi, d =∑
i
di

52 CAPITULO 2. GEOMETRIA AFIN Y HOMOLOGIA SINGULAR
, a− b = ∂d. Como f es inyectiva tenemos que
ai − bi = ∂di para cada i
. De esta forma tenemos que
ai +Bq(Xi) = bi +Bq(Xi)
Pues difieren por una frontera en Xi. con esto ϕ esta bien definida.Probaremos que ϕ es inyectiva. Sea c+Bq(X) ∈ kerϕ, queremos ver que
c = 0.Como ϕ(c + Bq(X)) = 0 tenemos ci + Bq(Xi) = 0. Por lo tanto ci = ∂di
con di ∈ Sq+1(Xi), todos iguales a 0 salvo un numero finito, por lo qued =
∑di ∈ Sq+1(X) y c = ∂d Con esto tenemos que c+Bq = Bq(la clase del
0) y por lo tanto φ es inyectiva.Probaremos que ϕ es suprayectiva. Si tenemos p =
∑(ci + Bq(Xi)), p ∈⊕
i
Hq(Xi), de aquı c =∑ci ∈ Zq(X) y ϕ(c+Bq(X)) = p
con esto ϕ es suprayectiva.De esta manera, hemos probado que ϕ es biyectiva y por lo tanto es un
isomorfismo.
Corolario 2.6.1. H0(X) es un R-modulo libre con tantos generadores comocomponentes arcoconexas de X.
Demostracion. Como H0(X) =⊕i∈I
H0(Xi) es suficiente demostrar que si X
es arcoconexo, entonces H0(X) = R. Sea x0 ∈ X fijo; dado x ∈ X sea σx unarco de x0 a x, entonces ∂(σx) = x− x0.
Por definicion, Z0(X) = S0(X). Dada una 0-cadena c, con c =∑x
vxx
donde x(e0) = x (esto porque los 0-simplejos son funciones constantes).Definimos la funcion ∂# : S0(X) → R como
∂#(∑
vxx) =∑
vx
es decir, la suma de los coeficientes.Por el Lema 2.5.1, ∂# es un homomorfismo de modulos con nucleo B0(X).
Este es suprayectivo pues ∂#(rx) = r.Ahora,Z0(X) = S0(X) pues ∂0c = 0 para cada c ∈ S0(X).Por el primer teorema de isomorfismo tenemos que
H0(X) ∼= R

2.1. GEOMETRIA AFIN 53
Podemos usar el morfismo ∂# para definir otro tipo de homologıa, llamadahomologıa reducida, pero antes de eso veamos un ejemplo.
Usando este teorema podemos ver cual es la homologıa de un espaciotopologico totalmente disconexo.
Ejemplo 2.7. Sea X un espacio totalmente disconexo , entonces la ho-mologıa de X es
Hq(X) =
{0 si q > 0⊕
x∈X
R si q = 0
Basta ver que las componentes arcoconexas de X son los puntos.Sabemos por definicion todo que todo subconjunto conexo de X tiene a
lo mas un punto. Como cada componente arcoconexa de X es arcoconexa,en particular es conexa. De esta forma, las componentes arcoconexas son losconjuntos de un solo punto. Por el teorema 2.6 tenemos lo que buscamos.
Proposicion 2.6.1. Sea X un espacio topologico y c ∈ S1(X), entonces
∂#∂1c = 0
Demostracion. Por el lema 2.5.1 tenemos que ∂#(∂1c)) = 0
Definamos la homologıa reducida, la homologıa que hemos estudiado has-ta ahora sera llamada homologıa completa.
Definicion 2.6.1. Para cada q entero no negativo definimos ∂#q como
∂#q =
{∂q si q > 0∂# si q = 0
Definimos la homologıa relativa de X como
H#q (X) = ker ∂#
q / Im ∂#q+1
La denotamos como H#q (X).
Lo que buscamos es que la homologıa de un espacio trivial, es decir, unpunto, sea trivial. Esto no pasa con la homologıa completa, pero veamos quesi con la reducida, mas aun tenemos lo siguiente.
Teorema 2.7. Sean {Xi}ri=1 las componentes arcoconexas de X, entonces
H#0 (X) es un R-modulo libre con r − 1 generadores.

54 CAPITULO 2. GEOMETRIA AFIN Y HOMOLOGIA SINGULAR
Demostracion. Sean {xi}ri=1 representantes de las componentes, fijemos i0 ∈
1, 2, . . . , r .Sea α ∈ S0(X), tenemos α =
∑x∈X
axx, para que ∂#α = 0 tenemos∑ax =
0.Se sigue de esto que α =
∑x∈X
ax(x− xi0).
Ahora, para cada x ∈ X existe ix ∈ {1, 2, . . . r} tal que x y xix estan enla misma clase.
Sea σx un arco que empieza en x y termina en xix , por definicion de ∂1
tenemos ∂(σx) = xix − x por lo que x = xix − ∂σx. De esta forma, x y xix
son 0-cadenas homologas.Como
α =∑
x∈X
ax(x− xi0)
Tenemos que
α =∑
x∈X
ax(x− xi0) =∑
x∈X
ax(x− xi0) =∑
x∈X
ax(xix − xi0)
reagrupando terminos, en cada uno de los factores (xi − x0) tenemos
α =∑
i6=i0
bi(xi − x0)
Y como α es arbitrario, tenemos que los r−1 elementos (xi − x0) con i 6= i0,generan a H#
0 (X).Para ver que son independientes, supongamos que
∑
i6=i0
bi(xi − xi0) = 0
Donde no todos los bi iguales a 0. De esto se sigue que
∑
i6=i0
bi(xi − xi0) = ∂
n∑
j=1
cjσj =
n∑
j=1
cj∂σj =
n∑
j=1
cj(zj − yj), (2.5)
donde σj es un 1-simplejo que va de yj a zj .Ahora, como cada σj actua en su componente arcoconexa, tenemos que
yj y zj estan en la misma componente, y de la ecuacion 2.5 tenemos queyj = zj = xi para alguna i, esto se debe a que los x′is son representantes de

2.1. GEOMETRIA AFIN 55
la relacion ∼ y por lo tanto no tenemos a dos de ellos en la misma clase. Porlo tanto cj(zj − yj) = 0 para cada j, luego todo el miembro derecho es nulo,y como S0 es libre, con 0-simplejos como generadores, tenemos que bi = 0para cada i de lo que obtenemos la independencia.
Corolario 2.7.1. La homologıa reducida de un punto es trivial, esto es,
H#q ({x}) = 0 para toda q
.
2.1.9. Homomorfismo inducido
Ya obtuvimos a partir de un espacio topologico X, una sucesion de modu-los {Hq(X)}∞q=0. Ahora queremos analizar lo que podemos hacer con dos es-pacios topologicos y su homologıa cuando una funcion continua entre ellos.De esta forma tendremos las propiedades mas importantes de la homologıa,que nos relacionan la topologıa con el algebra.
Sean X, Y espacios topologicos, y f : X → Y una funcion continua; si σes un q-simplejo en X, entonces podemos ver que f ◦ σ es un q-simplejo enY .
De esto podemos extender esta funcion, a un homomorfismo deR-modulos
Sq(f) : Sq(X) → Sq(Y )
de tal forma que
Sq(f)
(∑
σ
vσσ
)
=∑
σ
vσ(f ◦ σ)
Estas propiedades se deducen de la definicion
Proposicion 2.7.1. Sean X, Y, Z espacios topologicos , idX : X → X lafuncion identidad en X y f : X → Y, g : Y → Z funciones continuas.Tenemos que
Sq(idX) = idSq(X)
Sq(gf) = Sq(g)Sq(f) (2.6)
Donde idSq(X) es la funcion identidad en Sq(X).

56 CAPITULO 2. GEOMETRIA AFIN Y HOMOLOGIA SINGULAR
Demostracion. Sq(id)(σ) = id ◦ σ = σy por linealidad Sq(idX) = idSq(X)
para la segunda parte, sea f : X → Y , y g : Y → Z, entonces
Sq(gf)σ = (gf) ◦ σ = g ◦ (fσ) = (Sq(g)) (fσ) = (Sq(g) ◦ Sq(f)) (σ)
y de nuevo, por linealidad tenemos lo que queriamos
Otra propiedad importante es que el operador frontera conmuta con Sq(f)en el siguiente sentido
Lema 2.7.1. Sean X, Y espacios topologicos, tenemos que el siguiente dia-grama es conmutativo
Sq(X)
∂��
Sq(f)// Sq(Y )
∂��
Sq−1(X)Sq−1(f)
// Sq−1(Y )
Donde ∂Sq(f), ∂Sq−1(f) : Sq(X) → Sq−1(Y ) Esto es,
∂Sq(f) = Sq−1(f)∂ (2.7)
Demostracion. Buscamos la igualdad de las funciones, esta se da si
∂Sq(f)(c) = Sq−1(f)∂(c) para todo c ∈ Sq(X).
Probaremos la igualdad para un q-simplejo σ y obtendremos la igualdaden cualquier elemento de Sq(X) por linealidad.
∂(Sq(f)(σ)) = ∂(fσ)
=
q∑
i=0
(−1)i(f ◦ σ) ◦ F iq
=
q∑
i=0
(−1)if ◦ (σ ◦ F iq)
=
q∑
i=0
(−1)iSq−1(f)(σ ◦ F i
q
)
= Sq−1(f)
(q∑
i=0
(−1)iσ ◦ F iq
)
= Sq−1(f)(∂σ)

2.1. GEOMETRIA AFIN 57
La siguiente propiedad con respecto a los q-simplejos sera util mas ade-lante.
Proposicion 2.7.2. Sea σ un q-simplejo en X, entonces
Sq(σ)(δq) = σ
Demostracion. σ : ∆q → X, δq : ∆q → ∆q es la identidad, de aquı queδq ∈ Sq(∆q).
Lo que tenemos que verificar es que σ ◦ δq = σ lo cual es inmediato puesδq es la identidad.
Sea z un q-ciclo en X. Denotamos la clase de homologıa de z por z, estoes, z = x + Bq(X). Podemos definir un homomorfismo Hq(X) → Hq(Y ) dela siguiente forma
Definicion 2.7.1. Sean X, Y espacios topologicos y f : X → Y continua,definimos Hq(f) : Hq(X) → Hq(Y ) como
Hq(f)(z) = Sq(f)(z)
el homomorfismo de modulos Hq(f) sera llamado el homomorfismo in-ducido por f
Teorema 2.8. Sean X, Y, Z espacios topologicos, idX la funcion identidaden X y f : X → Y, g : Y → Z funciones continuas, se cumple que
Hq(idX) = idHq(X) (2.8)
Hq(gf) = Hq(g) ◦Hq(f) (2.9)
Demostracion. Hq(id)(z) = Sq(id)(z) = z
Sean f : X → Y, g : Y → Z tenemos que
Hq(gf)(z) = Sq(gf)(z)
= Sq(g)Sq(f)(z)
= Hq(g)(Sq(f)(z)
)
= Hq(g) ◦Hq(f)(z)

58 CAPITULO 2. GEOMETRIA AFIN Y HOMOLOGIA SINGULAR
Corolario 2.8.1. La homologıa de un espacio es un invariante topologico,esto es, si X, Y son espacios homeomorfos entonces Hq(X) y Hq(Y ) sonR-modulos isomorfos
Demostracion. Sean X, Y homeomorfos, entonces existen funciones contin-uas f : X → Y , g : Y → X tales que
f ◦ g = idY
g ◦ f = idX
por lo tanto existen homomorfismos de modulos
Hq(f) : Hq(X) → Hq(Y )
Hq(g) : Hq(Y ) → Hq(X)
Tales que Hq(f)◦Hq(g) = idHq(Y ), y ademas Hq(g)◦Hq(f) = idHq(X) Porproposicion ?? Hq(f) es un isomorfimo de modulos entre Hq(X) y Hq(Y )
Decimos que Hq es un funtor covariante de la categorıa de los espaciostopologicos a la categorıa de los R-modulos, en el sentido de que se cumpleel teorema 2.8. Tambien se dice que el homomorfismo inducido Hq(f) esfuntorial.
Para ver definicion de categorıa y funtor ver Apendice.
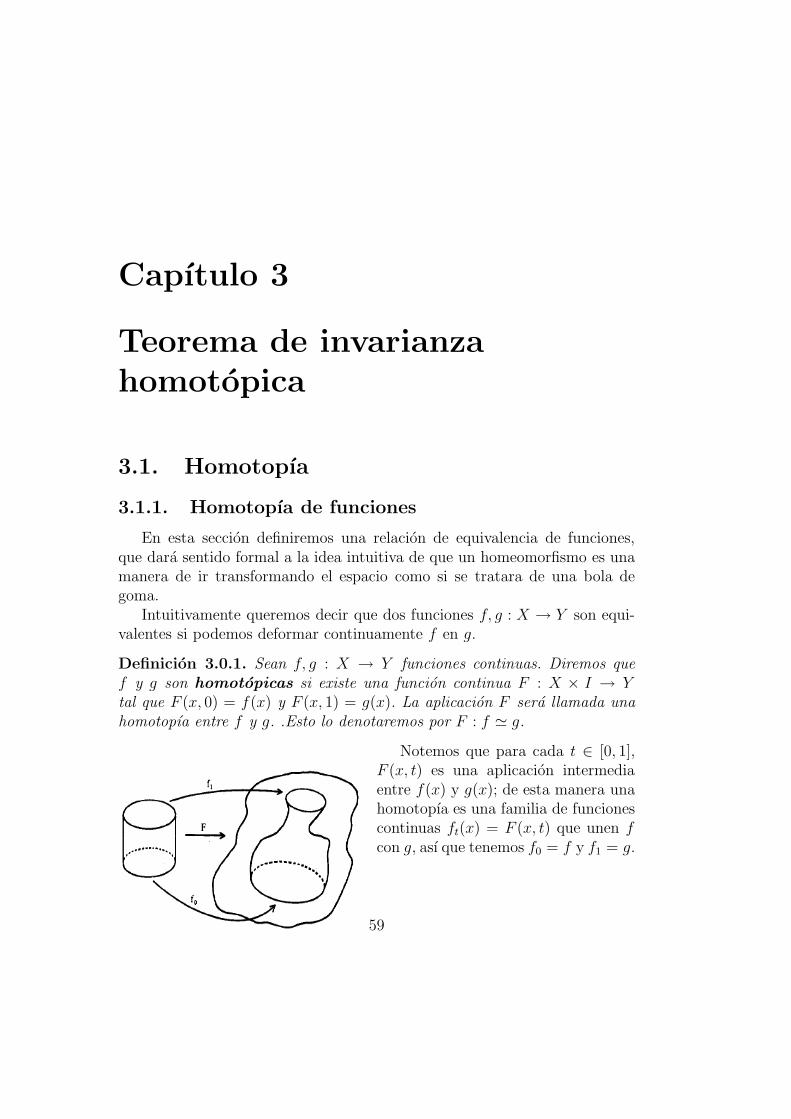
Capıtulo 3
Teorema de invarianza
homotopica
3.1. Homotopıa
3.1.1. Homotopıa de funciones
En esta seccion definiremos una relacion de equivalencia de funciones,que dara sentido formal a la idea intuitiva de que un homeomorfismo es unamanera de ir transformando el espacio como si se tratara de una bola degoma.
Intuitivamente queremos decir que dos funciones f, g : X → Y son equi-valentes si podemos deformar continuamente f en g.
Definicion 3.0.1. Sean f, g : X → Y funciones continuas. Diremos quef y g son homotopicas si existe una funcion continua F : X × I → Ytal que F (x, 0) = f(x) y F (x, 1) = g(x). La aplicacion F sera llamada unahomotopıa entre f y g. .Esto lo denotaremos por F : f ≃ g.
Notemos que para cada t ∈ [0, 1],F (x, t) es una aplicacion intermediaentre f(x) y g(x); de esta manera unahomotopıa es una familia de funcionescontinuas ft(x) = F (x, t) que unen fcon g, ası que tenemos f0 = f y f1 = g.
59

60 CAPITULO 3. TEOREMA DE INVARIANZA HOMOTOPICA
Figura 3.1: Aplicaciones homotopicas y Aplicaciones no homotopicas
En ocaciones queremos que a una homotopıa cumpla con propiedadesadicionales. Un ejemplo d esto es el siguiente. Sea f : I → Y esto es, f esuna curva, entonces f es homotopica a la funcion constante g(x) = f(0) conla homotopıa H : I × I → Y , H(x, t) = f(1 − t)x.
Para evitar estas situaciones definiremos el concepto de homotopıa rela-tiva.
Definicion 3.0.2. Sea A ⊂ (X) y f0, f1 : X → Y . Diremos que f0 y f1
son homotopicas relativas a A si existe una homotopıa H : X × I → Ytal que H(a, t) = f0(a) ∀a ∈ A, ∀t ∈ I. Lo cual denotaremos por f0 ≃ f1
(relA) o f0 ≃relA f1
De esta forma una homotopıa relativa a A es una homotopıa tal que cadavalor de t, deja fijo a cada elemento de A con respecto a su valor en f0.
Ya con esto, si A = {0, 1}, en el ejemplo de la curva, tenemos que f(x) yano necesariamente es homotopica a una aplicacion constante, pues f(1) notiene que permanecer constante a lo largo de t, y en nuestro ejemplo anterioreste no era el caso.

3.1. HOMOTOPIA 61
Figura 3.2: Homotopıa Relativa a {0, 1}
El concepto de homotopıa es un caso particular de el de homotopıa rela-tiva pues si hacemos A = ∅ tenemos que una homotopıa relativa a A resultaser una homotopıa.
Ya tenemos definida nuestra relacion, ahora falta ver que esta es unarelacion de equivalencia.
Proposicion 3.0.1. La relacion ≃relA es una relacion de equivalencia en elconjunto de las funciones continuas de X a Y .
Demostracion.
(reflexividad) Sea H : X× I → Y definida porH(x, t) = f(x), entonces H : f ≃relA f
(simetrıa) Sea F : f0 ≃relA f1, definimos G : X×I → Y comoG(x, t) = F (x, 1−t).Tenemos que G : f1 ≃relA f0
(transitividad) Sean F,G : X × I → Y tales que F : f ≃relA g y G : g ≃relA h.Definimos
H(x, t) =
{F (x, 2t) 0 ≤ t ≤ 1
2
G(x, 2t− 1) 12≤ t ≤ 1
con esto, H : f ≃relA h

62 CAPITULO 3. TEOREMA DE INVARIANZA HOMOTOPICA
3.1.2. Homotopıa de espacios
Ahora definiremos la equivalencia homotopica de espacios, en base a laequivalencia homotopica de funciones.
Definicion 3.0.3. Sean X, Y dos espacios topologicos. Diremos que X es
homotopico a Y si existen funciones continuas f : X → Y , g : Y → Xtales que
fg ≃ id : Y → Y
gf ≃ id : X → X
Cada una de las funciones f, g son llamadas equivalencias homotopicas.
Tambien diremos que X y Y tienen la misma homotopıa o que X eshomotopicamente equivalente a Y si X es homotopico a Y .
De esta forma si X y Y son homeomorfos, entonces son homotopicamenteequivalentes. Veamos que no ocurre el recıproco.
Ejemplo 3.1. Sea X = Dn = {x ∈ Rn : ||x|| ≤ 1}, y Y = 0 ∈ Dn, donde 0denota el vector cero en Rn. Tenemos que X y Y no son homeomorfos puesno tienen la misma cardinalidad por lo que no existen funciones biyectivasentre ellos.
Sea f : Dn → {0} definida como f(x) = 0 y i : Y → X denota lainclusion, esto es,i(0) = 0, entonces fi = idY , y if = 0.
Si hacemos
H(x, t) = tx+ (1 − t)y
tenemos H : if ≃ idX
Los espacios con la misma homotopıa que un punto reciben un nombreespecial.
Definicion 3.0.4. Un espacio homotopico a un punto se llamara espaciocontractible.
Un hecho importante en el ejemplo 3.1 es que teniamos un subconjunto A(en el ejemplo 3.1 A = {0}) de nuestro espacio X (en el ejemplo 3.1 X = Dn)y una de las funciones involucradas en la homotopıa era la inclusion.

3.1. HOMOTOPIA 63
Definicion 3.0.5. Sea A ⊂ X, decimos que A es un retracto de deformacionsi existe una funcion continua r : X → A tal que ir ≃ id : X → X yri = id : A → A donde i : A → X es la inclusion. Si ademas tenemos queir ≃relA id : X → X diremos que A es un retracto de deformacion fuerte. afuncion r sera llamada una retraccion. Tambien diremos que A es un retractode X
Tenemos que tener cuidado con esto porque este concepto puede tener otrosignificado, pero en nuestro caso no tendremos problema pues siempre quehablemos de un retracto este sera un retracto de deformacion o un retractode deformacion fuerte.
Ejemplo 3.2. Sea X = S1 × I el cilindro y A = S1 × {0} ∼= S1 el cırculoinferior, vistos como subconjuntos de R3, esto es,
X = {(x, y, z) : x2 + y2 = 1, 0 ≤ z ≤ 1}
A = {(x, y, z) : x2 + y2 = 1, z = 0}
y hagamos r : X → A, como r(x, y, z) = (x, y, 0), sabemos que i : A→ Xesta dada por i(x, y, 0) = (x, y, 0) por lo que ri = idA, ahora ir(x, y, z) =(x, y, 0) sea H((x, y, z), t) = (x, y, (1 − t)z) es una homotopia relativa a A,de ir a idX.
Intuitivamente una retraccion es una deformacion continua del espacio aun subespacio, volviendo a la idea de ir torciendo un espacio hasta obtenerotro, volviendo a nuestra nocion intuitiva de homeomorfismo.
Una retraccion nos da un caso particular de homotopia de espacios, peromuy importante.
Un hecho importante es que estamos definiendo una nueva categorıa,esta es, la categorıa de los espacios homotopicos, hTop, donde los objetosson los espacios topologicos, los morfismos son las clases de homotopıa defunciones continuas, esto es, [f ] ∈ Hom(A,B) si f : A → B es continua yg ∈ [f ] ⇒ g ≃ f ; la composicion es la composicion usual.
En esta categorıa dos objetos son isomorfos si son espacios homotopicos, ycuando estudiamos propiedades homotopicas, implicitamente lo que estamoshaciendo es estudiar esta categorıa. Para definicion de categorıa ver Apendice.
Lo que estamos haciendo es estudiar otro tipo de equivalencia entre espa-cios topologicos, esta es la equivalencia homotopica, y como espacios homeo-morfos son en particular homotopicos, nuestros invariantes homotopicos serantambien invariantes topologicos.

64 CAPITULO 3. TEOREMA DE INVARIANZA HOMOTOPICA
3.2. El teorema de invarianza homotopica
Ahora mostraremos que los modulos de homologıa son invariantes ho-motopicos, no solo invariantes topologicos, el teorema fuerte que queremosprobar es el siguiente.
Teorema 3.1. Sean X, Y espacios topologicos y f, g : X → Y funciones con-tinuas. Si f y g son homotopicas , entonces para cada q, los homomorfismoinducidos Hq(f) y Hq(g) son iguales en el R-modulo Hq(X).
Este teorema quedara establecido al final del capıtulo despues de queveamos algunos resultados.
Definicion 3.1.1. Sea t ∈ I fijo. Definimos λt : X → X × I como λt(x) =(x, t) para cada x ∈ X
Por definicion tenemos que λt : λ0 ≃ λ1.Para cada q queremos construir un homomorfismo
Pq : Sq(X) → Sq+1(X × I)
tal que
∂q+1Pq + Pq−1∂q = Sq(λ1) − Sq(λ0) (3.1)
Donde cada uno de los morfismos anteriores van de Sq(X) a Sq(X × I).Por la ecuacion 3.1 diremos que Sq(λ0) y Sq(λ1) son homotopicos por
cadenas.El homomorfismo P sera llamado el operador prisma y sera construido
de tal forma satisfaga la siguiente propiedad funtorial:Para cada funcion continua h : Y → X el diagrama
Sq(Y )
Sq(h)
��
P// Sq+1(Y × I)
Sq+1(h×id)
��
Sq(X) P// Sq+1(X × I)
(3.2)
es conmutativo.
Teorema 3.2. El diagrama 3.2 es conmutativo si y solo si para cada q-simplejo singular σ : ∆q → X tenemos
P (σ) = Sq+1(σ × id)P (δq)

3.2. EL TEOREMA DE INVARIANZA HOMOTOPICA 65
Demostracion. (⇒) Sea Y = ∆q y h = σ. Como δq : ∆q → ∆q es la identidad,entonces δq ∈ Sq(∆q).
Siguiendo las flechas del diagrama, empezando en Sq(∆q) abajo y luegoderecha obtenemos PSq(σ)(δq); ahora, si nos vamos derecha y luego abajoobtenemos Sq+1(σ × id)P (δq), como el diagrama es conmutativo estos dosterminos son iguales, pero por proposicion 2.7.2, Sq(σ)(δq) = σ de dondetenemos
P (σ) = Sq+1(σ × id)P (δq)
(⇐) Sea σ : ∆q → Y un q-simplejo, y h : Y → X continua. Nos fijamos enel siguiente diagrama
Sq(∆q)
Sq(σ)
��
P// Sq+1(∆q × I)
Sq+1(σ×id)
��
Sq(Y )
Sq(h)
��
P// Sq+1(Y × I)
Sq+1(h×id)
��
Sq(X) P// Sq+1(X × I)
(3.3)
Sabemos que
P (σ) = Sq+1(σ × id)P (δq)
P (hσ) = Sq+1(hσ × id)P (δq)
Y queremos ver que
P (Sq(h)(σ)) = Sq+1(h× id)P (σ)
Ahora, Sq(h)(σ) = hσ, y hσ × id = (h× id)(σ × id), de lo que tenemos que
P (hσ) = Sq+1(h× id) [Sq+1(σ × id)P (δq)] = Sq+1(h× id)P (σ)
Del teorema anterior, vemos que solo es necesario definir P (δq).Ahora, ∆q × I tiene vertices A0 = (e0, 0), A1 = (e1, 0) . . . , Aq = (eq, 0),
B0 = (e0, 1), B1 = (e1, 1), . . . , Bq = (eq, 1).

66 CAPITULO 3. TEOREMA DE INVARIANZA HOMOTOPICA
Definicion 3.2.1. definimos P (δq) como
P (δq) =
q∑
i=0
(−1)i(A0, A1, . . . , Ai, Bi, . . . Bq)
Ejemplo 3.3. Sea q = 1, P (δ1) = (A0, B0, B1) − (A0, A1, B1)
Como lo ilustra la figura 3.3
Figura 3.3: P (δ1)
Lema 3.2.1.
(F hq × id) ◦ (A0 . . . AkBk . . . Bq−1)
=
{(A0 . . . AkBk . . . Bh . . . Bq) h > k
(A0 . . . Ah . . . Ak+1Bk+1 . . . Bq) h ≤ k
Demostracion. Queremos ver que la composicion de las dos transformacionesafines es el mapeo afın correspondiente, para esto basta ver que las funcionescoinciden en los vertices de ∆q.
En el caso h > k. Veamos primero la accion de (A0 . . . AkBk . . . Bq−1)
e0 7→ (e0, 0)
e1 7→ (e1, 0)...
ek 7→ (ek, 0)
ek+1 7→ (ek, 1)...
eq 7→ (eq−1, 1)

3.2. EL TEOREMA DE INVARIANZA HOMOTOPICA 67
Componiendo con (e0e1 . . . eh . . . eq) × id tenemos
e0 7→ (e0, 0)
e1 7→ (e1, 0)...
ek 7→ (ek, 0)
ek+1 7→ (ek, 1)...
eh 7→ (eh−1, 1)
eh+1 7→ (eh+1, 1)...
eq 7→ (eq, 1)
Que es igual a (A0 . . . AkBk . . . Bh . . . Bq)Para el caso h ≤ k, de manera analoga tenemos que (F h
q ×id)◦(A0 . . . AkBk . . . Bq)actua de la siguiente forma
e0 7→ (e0, 0)
e1 7→ (e1, 0)...
eh 7→ (eh+1, 0)...
ek 7→ (ek+1, 0)
ek+1 7→ (ek+1, 1)...
eq 7→ (eq, 1)
Que es igual a (A0 . . . Ah . . . Ak+1Bk+1 . . . Bq)
Proposicion 3.2.1. ∂Pδq + P∂δq = Sq(λ1)(δq) − Sq(λ0)(δq)
Demostracion. Como λ0(ek) = (ek, 0) yλ1(ek) = (ek, 1), ademas de que
Sq(λk)(δq) = λk con k = 0, 1,

68 CAPITULO 3. TEOREMA DE INVARIANZA HOMOTOPICA
Tenemos que λ1(δq)− λ0(δq) = (B0 . . . Bq)− (A0 . . . Aq); calculado ∂Pδq ten-emos
∂(Pδq) =
q∑
i=0
(−1)i∂(A0 . . . AiBi . . . Bq)
=
q∑
i=0
(−1)i
(q+1∑
k=0
(−1)j(A0 . . . AiBi . . . Bq)Fkq+1
)
=
q∑
i=0
q+1∑
k=0
(−1)i+k(A0 . . . AiBi . . . Bq)Fkq+1
Ahora, separamos esta suma en dos partes, recorriendo los ındices que cumplencon la condicion correspondiente, esto es
=
q∑
j≤i=0
(−1)i+j(A0 . . . Aj . . . AiBi . . . Bq)
+
q∑
i≤j=0
(−1)i+j+1(A0 . . . AiBi . . . Aj . . . Bq)
Nos fijamos en los ındices de ambas sumas en los cuales i = j. Esta resulta seruna suma telescopica ya que (A0 . . . Ai+1Bi+1 . . . Bq) = (A0 . . . AiBi . . . Bq),esto es
q∑
i=0
((A0 . . . AiBi . . . Bq) − (A0 . . . AiBi . . . Bq)
)
= (B0 . . . Bq) − (A0B1 . . . Bq) + (A0B1 . . . Bq)
+ · · ·+ (A0 . . . Aq−1Bq) − (A0 . . . Aq)
= (B0 . . . Bq) − (A0 . . . Aq)
por lo que tenemos
∂Pδq = (B0 . . . Bq) − (A0 . . . Aq)
+
q∑
j<i=1
(−1)i+j(A0 . . . Aj . . . AiBi . . . Bq)
+
q∑
i<j=1
(−1)i+j+1(A0 . . . AiBi . . . Aj . . . Bq)

3.2. EL TEOREMA DE INVARIANZA HOMOTOPICA 69
Para P∂δq, tenemos que
P∂δq = P
(q∑
h=0
(−1)hF hq
)=
q∑
h=0
(−1)hP (F hq )
=
q∑
h=0
(−1)hSq(Fhq × id)Pδq−1
Esto por el teorema 3.2.Ahora, tenemos que
P∂δq =
q∑
h=0
(−1)hSq(Fhq × id)Pδq−1
=
q∑
h=0
(−1)hSq(Fhq × id)
(q−1∑
k=0
(−1)k(A0 . . . AkBk . . . Bq)
)
=
q∑
h=0
(−1)
(q−1∑
k=0
(−1)kSq(Fhq × id)(A0 . . . AkBk . . . Bq−1)
)
=
q∑
h=0
q−1∑
k=0
(−1)h+k(F hq × id) ◦ (A0 . . . AkBk . . . Bq−1)
Separando en dos sumas, por el lema 3.2 tenemos que
P∂δq =∑
k<h
(−1)h+k(A0 . . . AkBk . . . Bh . . . Bq)
+∑
h≤k
(−1)h+k(A0 . . . Ah . . . Ak+1Bk+1 . . . Bq)
Haciendo h = j y k + 1 = i en la segunda suma. Tenemosh ≤ k si y solo sij < i.
Haciendo el cambio de variable obtenemos
P∂δq =∑
k<h
(−1)h+k(A0 . . . AkBk . . . Bh . . . Bq)
+∑
j≤i
(−1)i+j−1(A0 . . . Ah . . . AiBi . . . Bq)

70 CAPITULO 3. TEOREMA DE INVARIANZA HOMOTOPICA
De la identidad para ∂Pδq y esta ultima tenemos que
∂Pδq + P∂δq = Sq(λ1)(δq) − Sq(λ0)(δq)
que es lo querıamos demostrar.
Teorema 3.3. Sea X un espacio topologico, se cumple que
∂P + P∂ = Sq(λ1) − Sq(λ0)
Como homomorfismos de Sq(X) a Sq(X × I)
Demostracion. Basta probar la igualdad para un q-simplejo σ, sabemos que
P∂δq + ∂Pδq = Sq(λ1)(δq) − Sq(λ0)(δq)
.Aplicando Sq(σ × id) a ambos lados de la igualdad tendremos lo que
buscamos.Para P∂ tenemos
Sq(σ × id)P∂δq = PSq−1(σ)(∂δq) = P∂Sq(σ)(δq) = P∂σ
para ∂P tenemos
Sq(σ × id)∂Pδq = ∂Sq+1(σ × id)P (δq) = ∂Pσ
Para Sq(λk) con k = 0, 1, vemos que (σ× id) ◦ λk = λk ◦ σ, de esta formatenemos
Sq(σ × id)(Sq(λk))(δq) = Sq((σ × id) ◦ λk)(δq)
= Sq(λk ◦ σ)(δq)
= Sq(λk)Sq(σ)(δq)
= Sq(λk)(σ)
y de esta manera, aplicando a ambos lados de Sq(σ × id) obtenemos
∂Pσ + P∂σ = Sq(λ1)(σ) − Sq(λ0)(σ)

3.2. EL TEOREMA DE INVARIANZA HOMOTOPICA 71
Con lo que hemos probado hasta el momento estamos listos para probarel teorema principal.
Teorema 3.4. Sean f, g : X → Y funciones homotopicas, entoncesHq(f) = Hq(g) para todo q.
Demostracion. Sea G : f ∼= g, c ∈ Zq(X), tenemos
∂Pc+ P∂c = Sq(λ1)c− Sq(λ0)c = ∂(Pc)
Por lo tanto Sq(λ1) es homotopico por cadenas a Sq(λ0), (esto es, Sq(λ1)(c)es homotopico a Sq(λ0)(c) para cada q-ciclo pues difieren por ∂(Pc)).
Como Sq(λ1)(c) = Sq(λ0(c)) para cada q-ciclo c, entonces
Hq(λ1) = Hq(λ0)
Ahora, G ◦ λ0 = f , mientras que G ◦ λ1 = g, por lo tanto
Hq(f) = Hq(Gλ0) = Hq(G)Hq(λ0) = Hq(G)Hq(λ1) = Hq(Gλ1) = Hq(g)
De esta forma, como ya hemos calculado la homologıa de un punto, estaresulta ser la homologıa de cualquier espacio contractible, en particular Rn.

72 CAPITULO 3. TEOREMA DE INVARIANZA HOMOTOPICA
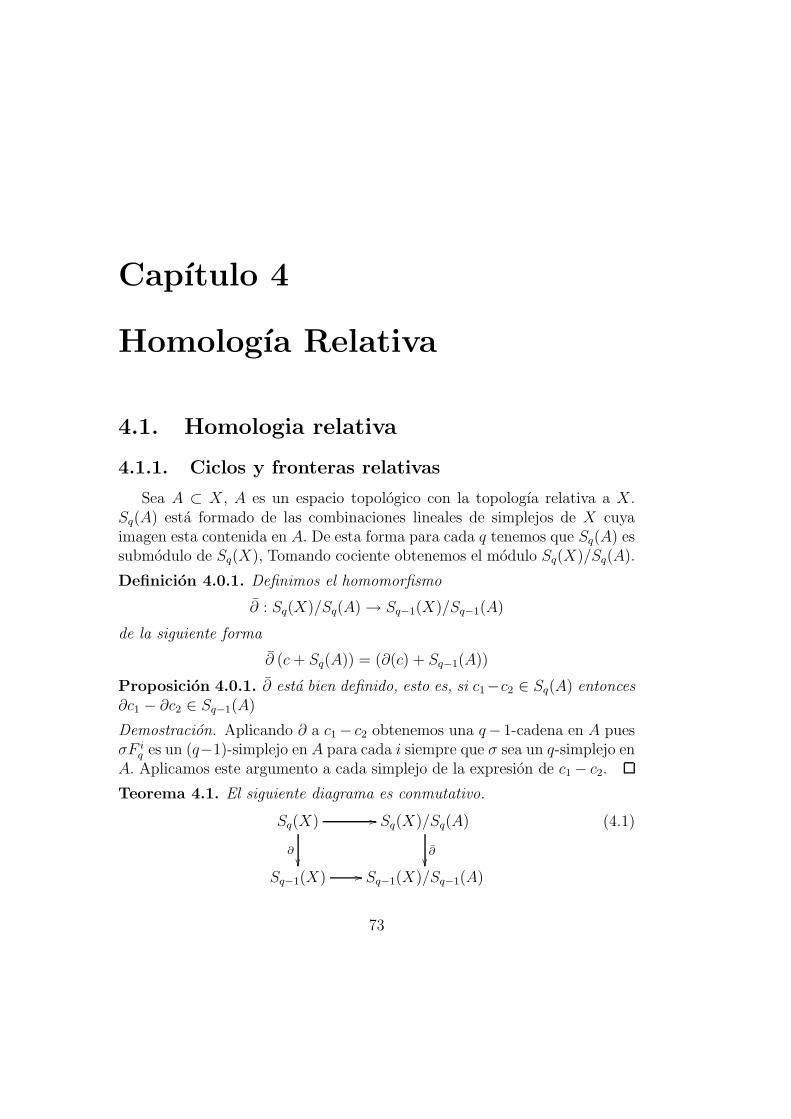
Capıtulo 4
Homologıa Relativa
4.1. Homologia relativa
4.1.1. Ciclos y fronteras relativas
Sea A ⊂ X, A es un espacio topologico con la topologıa relativa a X.Sq(A) esta formado de las combinaciones lineales de simplejos de X cuyaimagen esta contenida en A. De esta forma para cada q tenemos que Sq(A) essubmodulo de Sq(X), Tomando cociente obtenemos el modulo Sq(X)/Sq(A).
Definicion 4.0.1. Definimos el homomorfismo
∂ : Sq(X)/Sq(A) → Sq−1(X)/Sq−1(A)
de la siguiente forma
∂ (c+ Sq(A)) = (∂(c) + Sq−1(A))
Proposicion 4.0.1. ∂ esta bien definido, esto es, si c1−c2 ∈ Sq(A) entonces∂c1 − ∂c2 ∈ Sq−1(A)
Demostracion. Aplicando ∂ a c1 − c2 obtenemos una q− 1-cadena en A puesσF i
q es un (q−1)-simplejo en A para cada i siempre que σ sea un q-simplejo enA. Aplicamos este argumento a cada simplejo de la expresion de c1 − c2.
Teorema 4.1. El siguiente diagrama es conmutativo.
Sq(X)
∂��
// Sq(X)/Sq(A)
∂��
Sq−1(X) // Sq−1(X)/Sq−1(A)
(4.1)
73

74 CAPITULO 4. HOMOLOGIA RELATIVA
Demostracion. Sea c ∈ Sq(X), aplicando la proyeccion en Sq(A) obtenemosc+ Sq(A) y componiendo con ∂ tenemos ∂c + Sq−1(A).
Por otro lado, aplicando primero ∂ tenemos ∂c y aplicando la proyeccionen Sq−1(A) obtenemos ∂c + Sq−1(A).
Por lo tanto se tiene la igualdad y el diagrama conmuta.
Para ∂ se cumple una condicion analoga a la de ∂, la cual vemos en elsiguiente teorema.
Teorema 4.2.
∂∂ = 0
Demostracion.
∂ (∂(c) + Sq−1(A)) = ∂∂(c) + Sq−2(A) = 0 + Sq−2(A) = 0 mod Sq−2(A)
En base a esto, nos fijamos los modulos
1. ker(∂q)
2. Im(∂q+1)
Como ∂∂ = 0 tenemos que Im(∂q+1) ≤ ker(∂q).
Definicion 4.2.1. Definimos el q-esimo modulo de homologıa de X relativoa A sobre R como el modulo
ker(∂q)/ Im(∂q+1)
Y lo denotaremos por Hq(X,A;R)
Analogamente a Hq(X), omitiremos R si el anillo R queda fijo y deno-taremos simplemente como Hq(X,A).
Veamos que podemos definirHq(X,A) directamente de Sq(X). Denotandoπq a la proyeccion de Sq(A) en Sq(X), es decir, πq(c) = c+ Sq(A) para cadac ∈ Sq(X).
Nos fijamos en la imagen inversa de ker(∂q), esta es, π−1q (ker ∂q). La de-
notamos por Zq(X,A). Los elementos de Zq(X,A) seran llamados q-ciclosrelativos de A.

4.1. HOMOLOGIA RELATIVA 75
Teorema 4.3.
Zq(X,A) = {c ∈ Sq(X) : ∂(c) ∈ Sq−1(A)}
Demostracion. ∂(c+Sq(A)) = 0 ⇔ ∂(c)+Sq−1(A) = 0 ⇔ ∂(c) ∈ Sq−1(A)
La figura 4.1 ilustra un 1-ciclo relativo. Esta curva es un ciclo relativopues sus puntos inicial y final estan en A.
Figura 4.1: Ciclo relativo a A
De manera similar definimos Bq(X,A) como π−1q Im(∂q+1).Los elementos
de Bq(X,A) les llamamos q-fronteras relativas de A.
Teorema 4.4.
Bq(X,A) = {c ∈ Sq(X) : ∃cA ∈ Sq(A) tal que c homologo a cA}
, esto es, c ∈ Bq(X,A) si y solo si existe cA ∈ Sq(A) y d ∈ Sq+1(X) tales que
c− cA = ∂d
Demostracion. (⇒) Sea E el conjunto definido en el enunciado del teorema,sic ∈ Bq(X,A), entonces existe d ∈ Sq+1(X) con c + Sq(A) = ∂(d) + Sq(A),esto es, c− ∂(d) ∈ Sq(A), sea cA = c− ∂(d) queremos ver que c es homologoa cA, pero c− cA = ∂(d), de aquı que c ∈ E y por lo tanto Bq(X,A) ⊂ E
(⇐) Sea c ∈ E, de aqui que ∃cA ∈ Sq(A) tal que c− cA = ∂d para alguna(q + 1)-cadena d, de nuevo tenemos c − ∂d = cA por lo tanto c + Sq(A) =∂d + Sq(A) y obtenemos c ∈ Bq(X,A) y por lo tanto E ⊂ Bq(X,A)
De este modo es facil ver que Bq(X,A) ≤ Zq(X,A) y tomando cocienteobtenemos lo que buscamos
Teorema 4.5. Hq(X,A) = Zq(X,A)/Bq(X,A)

76 CAPITULO 4. HOMOLOGIA RELATIVA
Demostracion. Del primer teorema de isomorfismo tenemos que
Zq(X,A)/Sq(A) = (a)
yBq(X,A)/Sq(A) = (b)
.lo que queremos ver que
(Zq(X,A)/Sq(A)) / (Bq(X,A)/Sq(A)) = Zq(X,A)/Bq(X,A)
Lo cual se sigue del tercer teorema de isomorfismo.
El siguient ejemplo muestra una frontera relativa que no es una frontera.Para ver que esta es una frontera relativa usaremos la caracterizacion descritaen el teorema anterior.
Ejemplo 4.1. Sea X el cilindro S1 × I y A el subespacio {1} × S1 como lomuestra la figura 4.2
Figura 4.2: Frontera relativa a A
Sea 0 ≤ t < 1. Definimos los 1-cıclos s, st0 : I → X como
s(t) = (e2πit, 1) para cada t ∈ I
st0(t) = (e2πit, t0) para cada t ∈ I
Podemos ver geometricamente que st0 no es una frontera, pues no encierrauna region plana en el cilindro.

4.1. HOMOLOGIA RELATIVA 77
Veamos que st0 es una 1-frontera relativa. Para esto es suficiente verque st0 es homologa a s pues s ∈ Sq(A). Definimos la 2-cadena d en X dela siguiente forma. tomamos el segmento {(1, t) ∈ S1 × I : 0 ≤ t ≤ 1}Y separamos temporalmente el cilindro. Nos quedara rectangulo como en lafigura 4.3 donde las flechas verticales indican indentificacion mientras quelas horizontales indican la orientacion de los 1-ciclos s,−st0.
Figura 4.3: Cilindro
Llamamos p0, p1, p2, p4 a los vertices del rectangulo ilustrado en la figura.De esta forma, definimos d1 como la aplicacion cociente ( pegar el cuadradode nuevo) composicion la transformacion afın (p1, p2, p3). Para d2 hacemosalgo analogo pero con la composicion afın (p1, p4, p3).
De esta forma, ∂d = s− st0 y por lo tanto, estas son cadenas homologasque es lo que queriamos ver.
4.1.2. Homomorfismo Inducido
Definicion 4.5.1. Sean X, Y espacios topologicos, con A ⊂ X,B ⊂ Y ,diremos que f es una funcion continua entre el par (X,A) y (Y,B) si f :X → Y y f(A) ⊂ B. Esto lo denotaremos por f : (X,A) → (Y,B).
Sea f : (X,A) → (Y,B) y Sq(f) : Sq(X) → Sq(Y ) como f(A) ⊂ Btenemos que Sq(f) manda Sq(A) en Sq(B), esto pues cada simplejo en Acomposicion f es un simplejo en B. Mas aun, tenemos lo siguiente
Proposicion 4.5.1.
Sq(f)(Zq(X,A)) ⊂ Zq(Y,B)
Sq(f)(Bq(X,A)) ⊂ Bq(y, B)

78 CAPITULO 4. HOMOLOGIA RELATIVA
Demostracion. sea c ∈ Zq(X,A), tenemos ∂c ∈ Sq−1(A), queremos ver que
∂Sq(f)(c) ∈ Sq−1(B)
Ahora como∂(Sq(f)(c)) = Sq−1(f)∂c
y Sq−1(A) ⊂ Sq−1(B) tenemos que
Sq−1(∂c) ∈ Sq−1(B)
y como es igual a ∂Sq(f)(c) tenemos que Sq(f)(c) ∈ Zq(X,A).Para c ∈ Bq(X,A) con c− cA = ∂d
Donde cA ∈ Sq(A) y d ∈ Sq+1(X) de aqui tenemos que
Sq(f)(c) − Sq(f)(cA) = Sq(∂d)
donde Sq(f)(cA) ∈ Sq(B) y como
Sq(f)(∂d) = ∂Sq+1(d) ∈ Bq(Y )
tenemos que c ∈ Bq(Y,B).
De esta forma podemos definir un homomorfismo en el cociente Hq(X,A)al cociente Hq(Y,B) denotado por Hq(f), dado de la forma
Hq(f)(c+Bq(X,A)) = Sq(f)(c) +Bq(Y,B)
Lo primero que tenemos que ver es que esta bien definido, pues lo hemosdefinido por representantes, y en efecto tenemos la siguiente proposicion.
Proposicion 4.5.2. Sea c1 − c2 ∈ Bq(X,A) entoncesSq(f)(c1) − Sq(f)(c2) ∈ Bq(Y,B)
Demostracion. Por la proposicion anterior Sq(f)(c1 − c2) ∈ Bq(Y,B) y comoSq(f) es un homomorfismo tenemos lo que buscamos.
Teorema 4.6. Sean X, Y espacios topologicos con A ⊂ X y B ⊂ Y y f :(X,A) → (Y,B) continuua. Entonces el siguiente diagrama es conmutativo
Zq(X,A)
��
Sq(f)// Zq(Y,B)
��
Zq(x,A)/Bq(X,A)Hq(f)
// Zq(Y,B)/Bq(Y,B)
4.1. HOMOLOGIA RELATIVA 79
Demostracion. Sea c ∈ Zq(X,A) pasando al cociente tenemos c + Bq(X,A)y aplicando Hq(f) tenemos Sq(f)(c)+Bq(Y,B), por otro lado, si recorremosde X a Y tenemos Sq(f)(c) y pasando al cociente Sq(f)(c)+Bq(Y,B) que eslo que queriamos.
Y de nuevo, tenemos funtorialidad. Esto es,
Teorema 4.7. Sean X, Y espacios topologicos con A ⊂ X y B ⊂ Y yf : (X,A) → (Y,B) continuua. Entonces
Hq(fg) = Hq(f)Hq(g)
Hq(id) = id
Demostracion. (X,A)g→ (Y,B)
f→ (Z,C)
Sq(fg)(c+Bq(X,A)) = Sq(fg)(c) +Bq(Z,C)
= Sq(f)Sq(g)(c) +Bq(Z,C)
= Hq(f) (Sq(g)(c) +Bq(Y,B))
= Hq(f)Hq(g)(c+Bq(X,A))
Una observacion importante es que, si A = ∅, entonces Sq(A) = 0 porlo que Hq(X, ∅) = Hq(X), de esta forma, la homologıa absoluta es un casoparticular de la homologıa relativa y cualquier discusion acerca de homologıarelativa incluye a la homologıa absoluta como caso particular.
Ejemplo 4.2. Sea j : (X, ∅) → (X,A) la identidad, entonces tenemos unhomomorfismo Hq(j) : Hq(X) → Hq(X,A), si ademas nos fijamos eni : A→ X la inclusion, tenemos un morfismo Hq(i) : Hq(A) → Hq(X), nospreguntamos por Hq(ji) : Hq(A, ∅) → Hq(X,A)
Proposicion 4.7.1. Hq(ji) = 0
Demostracion. Como Zq(A) ⊂ Sq(A) ⊂ Bq(X,A) tenemos que
Hq(ji)(c+Bq(A)) = Sq(j)(Sq(i)(c) +Bq(c)) = Sq(j)Sq(i)(c) +Bq(X,A)
pero c ∈ Sq(A), entonces Sq(ji)(c) ∈ Bq(X,A) de aqui tenemos que
Hq(ji)(c) = 0

80 CAPITULO 4. HOMOLOGIA RELATIVA
Teorema 4.8. Sea f : (X,A) → (Y,B), entonces el siguiente diagrama esconmutativo
Hq(A)
Hq(fi)
��
Hq(i)// Hq(X)
Hq(f)
��
Hq(j)// Hq(X,A)
Hq(f)
��
Hq(B)Hq(i′)
// Hq(Y )Hq(j′)
// Hq(Y,B)
Demostracion. Dado queHq(j)Hq(i) = 0, basta probar que los dos cuadradospequenos son conmutativos.
Sea c+Bq(A) ∈ Hq(A), si aplicamos Hq(fi) y despues Hq(i′) obtenemos
Hq(i′)(Sq(f)Sq(i)(c) +Bq(B)) = Sq(f)(c) +Bq(Y )
y si aplicamos Hq(i) y despues Hq(f) obtenemos
Hq(f)Hq(i)(c+Bq(A)) = Hq(f)(c+Bq(X)) = Sq(f)(c) + Bq(Y )
Por otro lado, sea c+Bq(X), aplicando Hq(f) y despues Hq(j′) tenemos
Hq(j)(Sq(f)(c) +Bq(Y )) = Sq(f)(c) +Bq(Y,B)
y si aplicandos primero Hq(j) y despues Hq(f) obtenemos
Hq(f)(c+Bq(X,A)) = Sq(c) +Bq(Y,B)
.
Teorema 4.9. Sean {Xk}k∈K las componentes arcoconexas de X, si deno-tamos Ak = A ∩Xk entonces
Hq(X,A) =⊕
k∈K
Hq(Xk, Ak)
Demostracion. Sea ik : (Xk, Ak) → (X,A) la inclusion, Definimos
ϕ :⊕
k∈K
Sq(Xk) → Sq(X)
como
ϕ
(∑
k∈K
ck
)
=∑
k∈K
Sq(ik)(ck)

4.2. SUCESION EXACTA 81
De nuevo, como cada simplejo actua por componentes, y como vimos en elcapitulo 2, este es un isomorfismo de modulos. Ahora,
⊕Zq(Xk, Ak)
ϕ→ Zq(X,A)
Es un isomorfismo, ya que ∂ actua por componentes, esto es, si ∂c ∈ Sq−1Ay c =
∑k∈K
ck entonces ∂ck ∈ Sq−1(A) y como ck ∈ Sq−1(X) tenemos que
∂ck ∈ Sq−1(Ak).
De aqui tenemos que ∂ck ∈ Sq−1(Ak) ⇔ ∂
(∑k∈K
Sq(ik)(c)
)∈ Sq−1(A).
De manera similar,⊕
Bq(Xk, Ak)ϕ→ Bq(X,A) es un isomorfismo, esto
es, si c − cA = ∂d, donde c =∑ck, d =
∑dk y cA =
∑cAk
entoncesck − dk = ∂dk. De esta forma ϕ induce un isomorfismo en el cociente, estoes, ϕ′ tal que el siguiente diagrama es conmutativo.
⊕Zq(Xk, Ak)
��
ϕ// Zq(X,A)
��⊕Hq(Xk, Ak)
ϕ′
// Hq(X,A)
esto es,
ϕ′(∑
ck +Bq(Xk, Ak))
=(∑
Sq(ik)ck +Bq(X,A))
=∑
Hq(ik)(ck +Bq(Xk, Ak))
Y por lo tanto ϕ′ es un isomorfismo.
4.2. Sucesion Exacta
Definicion 4.9.1. Sea (Mi, ϕi)i∈Z un complejo de cadenas, esto es, una suce-sion de modulos y homomorfismos
. . . ϕi+2// Mi+1
ϕi+1// Mi
ϕi// Mi−1
ϕi−1// . . .
Decimos que la sucesion (Mi, ϕi) es exacta si
ϕi ◦ ϕi+1 = 0
Y ademas kerϕi = Imϕi+1

82 CAPITULO 4. HOMOLOGIA RELATIVA
Como vimos en el Capıtulo 2, si ϕi ◦ ϕi+1 = 0 entonces Imϕi+1 ⊂ kerϕi.El hecho de que una sucesion sea exacta, es que la otra contencion tambiense cumple, esta es, kerϕi ⊂ Imϕi+1
Ejemplo 4.3. Sea X = x y tomamos la sucesion {Sq(X), ∂#q }, recorde-
mos que la frontera reducida es igual a la frontera salvo en el caso ∂#0
donde es igual a la suma de las componentes; recordemos que H#q (X) =
ker ∂#q /Im∂
#q+1 = 0 para cada q, por lo tanto la sucesion es exacta.
Este ejemplo nos muestra que la homologıa reducida de un espacio topologi-co trivial, es trivial, es decir, es igual a 0 para toda q. De esta forma podemosver que los modulos de homologıa nos dan una idea algebraica de que tanexacta es la sucesion (Sq, ∂) o topologicamente que tan trivial es el espacioX.
El proposito de esta seccion, es contruir un homomorfismo de Hq(X,A)a Hq−1(A) de tal forma que la sucesion
. . . // Hq(A)Hq(i)
// Hq(X)Hq(j)
// Hq(X,A) // Hq−1(A) // . . .
Es exacta. (Definimos Hq(X) = 0 para q < 0).Este homomorfismo sera llamado homomorfismo de enlace, y lo denotare-
mos tambien como ∂.
Definicion 4.9.2. Definimos ∂ : Hq(X,A) → Hq−1(A) de la siguiente forma
∂(c +Bq(X,A)) = (∂c) +Bq−1(A)
Lo primero que tenemos que hacer, es ver que esta bien definido y enefecto tenemos
Proposicion 4.9.1. Si c1 − c2 ∈ Bq(X,A), entonces ∂(c1 − c2) ∈ Bq−1(A)
Demostracion. Como c1, c2 ∈ Zq(X,A) tenemos ∂c1, ∂c2 ∈ Sq−1(A).Ahora, c1 − c2 = ∂d + cA donde d ∈ Sq+1(X) y cA ∈ Sq(A), esto porque
c1 − c2 ∈ Bq(X,A). Aplicando ∂ tenemos
∂(c1 − c2) = ∂∂d + ∂cA = ∂cA
que es lo que queriamos demostrar.

4.2. SUCESION EXACTA 83
De esta manera, ya definido el homomorfismo de enlace ∂, este cumplecon la exactitud de la sucesion de homologıa, mas en concreto tenemos elsiguiente teorema
Teorema 4.10. La sucesion
. . . // Hq(A)Hq(i)
// Hq(X)Hq(j)
// Hq(X,A) ∂// Hq−1(A) // . . .
es exacta
Demostracion. Demostraremos la exactitud para cada caso, primero enHq(X).Como vimos en la seccion anterior, Hq(ji) = 0, solo falta demostrar
kerHq(j) ⊂ ImHq(i).Sea Hq(j)(c+Bq(X)) = 0, entonces c+Bq(X,A) = Bq(X,A) por lo que
c ∈ Bq(X,A), c− cA = ∂d.Como cA = c− ∂d tenemos ∂cA = ∂c − ∂∂d = 0 con lo que cA ∈ Zq(A),
basta ver que Hq(i)(cA + Bq(A)) = c + Bq(X), lo cual es cierto ya quec− cA = ∂d.
Ahora veamos la exactitud en Hq(X,A).
∂Hq(j)(c+Bq(X)) = ∂c +Bq−1(A) = Bq−1(A)
pues ∂c = 0.Veamos que ker ∂ ⊂ ImHq(j) Sea ∂(c +Bq(X,A)) = 0, entonces
∂c ∈ Bq−1(A), de aqui ∂c = ∂cA para algun cA ∈ Sq(A), ahora c−cA ∈ Zq(X).Queremos ver que
Hq(j)(c− cA +Bq(X)) = Hq(j)(c+Bq(X,A))
En efecto, (c− cA) + Bq(X,A) = c+Bq(X,A) ya que
c− (c− cA) = cA ∈ Sq(A)
por lo que c− (c− cA) ∈ Bq(X,A) de lo cual
Hq(j)((c− cA) +Bq(X)) = c+Bq(X,A)
Ahora veamos la exactitud en Hq(A).
Hq(i)∂(c +Bq+1(X,A)) = Hq(i)(∂c +Bq(A)) = ∂c +Bq(X) = Bq(X)

84 CAPITULO 4. HOMOLOGIA RELATIVA
Pues ∂c ∈ Bq(X)Ahora veamos que kerHq(i) ⊂ Im∂, sea c+Bq(A) tal que
Hq(i)(c+Bq(A)) = 0
, de aqui c + Bq(X) = Bq(X) con lo que c = ∂d para d ∈ Sq+1(X) ahora,d ∈ Zq+1(X,A) pues ∂d = c ∈ Sq(A), de cual tenemos que
d+Bq+1(X,A) ∈ Hq+1(X,A)
, ahora,
∂(d +Bq+1(X,A)) = ∂d+Bq(A) = c+Bq(A)
pues c− ∂d = 0
La exactitud de la sucesion de homologıa nos da cierta informacion sobrelos modulos de homologıa, en particular, esta y el teorema de excision queveremos en el proximo capıtulo nos serviran para determinar la homologıade las esferas Sn. Por el momento veamos un ejemplo simple de su utilidad
Proposicion 4.10.1. Si A = {x}, entonces Hq(j) : Hq(X) → Hq(X,A) esun isomorfismo para q > 0.
Demostracion. Para q > 1, Hq(A) = 0, por lo que
0 // Hq(X)Hq(j)
// Hq(X,A) // 0
Es exacta.Como ImHq(i) = 0 = kerHq(j), tenemos que Hq(j) es inyectiva.Por otro lado, como ImHq(j) = ker ∂ = Hq(X,A) tenemos que Hq(j) es
sobre.Para q=1, tenemos que
0 // H1(X)H1(j)
// H1(X,A) // R
Ahora, Como H1(i) = 0 y kerH1(j) = ImHq(i) = 0, tenemos que H1(j) essobre, como B1(X, x) = 0 tenemos queH1(X, x) = Z1(X, x) y ∂ : Z1(X, x) →R es el homomorfismo 0, de esta forma Hq(j) es uno a uno.
De esta forma Hq(j) es biyectiva y por lo tanto es un isomorfismo.

4.2. SUCESION EXACTA 85
Ahora veamos que la sucesion exacta de homologıa es funtorial, en elsentido dado a continuacion
Teorema 4.11. Sea f : (X,A) → (Y,B), entonces el siguiente diagrama esconmutativo
Hq(A)
Hq(fi)��
Hq(i)// Hq(X)
Hq(f)��
Hq(j)// Hq(X,A) ∂
//
Hq(f)��
Hq−1(A)
Hq−1(fi)
��
Hq(B)Hq(i′)
// Hq(Y )Hq(j′)
// Hq(Y,B) ∂// Hq−1(B)
Demostracion. Por el teorema es suficiente ver la conmutatividad de
Hq(X,A) ∂//
Hq(f)��
Hq−1(A)
Hq−1(fi)
��
Hq(Y,B) ∂// Hq−1(B)
Sea c+Bq(X,A) ∈ Hq(X,A), aplicando Hq(f) y luego ∂ tenemos
∂Hq(c+Bq(X,A)) = ∂(Sq(f)c+Bq(Y,B)) = ∂Sq(f)c+Bq−1(Y,B))
Por otro lado, aplicando primero ∂ y luego Hq−1(fi) tenemos
Hq−1(fi)∂(c+Bq(X,A)) = Hq−1(fi)(∂c+Bq−1(X,A)) = Sq−1(f)∂c+Bq − 1(Y,A)
Pero Sq−1(f)∂ = ∂Sq(f) y obtenemos lo que buscabamos.

86 CAPITULO 4. HOMOLOGIA RELATIVA

Capıtulo 5
El Teorema de escision
5.1. Dividiendo simplejos afines
Ahora presentaremos otro de los resultados fundamentales para la ho-mologıa singular, que nos permitira, entre otras cosas, calcular la homologıade las esferas Sn para cada n.
Para probar este resultado, primero tenemos que formalizar un hecho in-tuitivamente obvio, el cual dice que un simplejo se puede dividir en simplejosarbitrariamente pequenos, tenemos en esto una dificultad, pues si X no esun espacio metrico, no sabemos con certeza que quiere decir arbitrariamentepequeno.
En el caso metrico, podriamos pensar en que las divisiones son arbitraria-mente pequenas si para cada punto del espacio x ∈ X y cada radio rx por maspequeno que sea, tenemos que cada division esta completamente contenidaen una de las bolas Brx(x).
Notemos que en este caso, para cualquier eleccion de los radios, tenemosque {Brx(x)}x∈X es una cubierta de X por bolas arbitrariamente pequenas,cuando pasamos a espacios topologicos no necesariamente tenemos metrica,pero podemos pedir que se cumpla la condicion para una cubierta arbitrariadel espacio, lo cual siempre es posible. Formalmente queremos esto.
Definicion 5.0.1. Sea X un espacio topologico y U = {Ui}i∈I una cubiertaabierta de X,diremos que un q-simplejo singular σ en X es pequeno de ordenU si σ manda ∆q en uno de los abiertos Ui.
Buscamos probar que cada clase de homologıa relativa de (X,A) tiene unrepresentante que es combinacion lineal de simplejos pequenos de orden U ,
87

88 CAPITULO 5. EL TEOREMA DE ESCISION
para lo cual construiremos un homomorfismo
Sd : Sq(X) → Sq(X)
llamado operador subdivision.Ilustramos para q = 2 lo que el operador subdivision hara.Sea c ∈ Sq(X), para comparar c y Sd(c) construiremos otro operador
T : Sq(X) → Sq+1(X)
tanto para Sd como para T pondremos subindice q si el contexto fuera causade ambiguedad. Antes de definir Sq y T , consideremos ciertos detalles
Definicion 5.0.2. Sea σ = (p0, p1, . . . , pq) un simplejo singular afın en unespacio afın A y B ∈ A, definimos Bσ como el q + 1-simplejo
Bσ = (B, p0, p1, . . . , pq)
extendemos B a Sq(A) por linealidad, esto es, si c =∑viσi entonces
Bc = B(∑
i
viσi) =∑
i
viBσi
Proposicion 5.0.1.
∂Bc =
{c−B∂c q > 0
c− (∑i
vi)B q = 0
Demostracion. Sea q > 0, es suficiente verificarlo para σ = (p0p1 . . . pq)
∂Bσ = ∂(Bp0p1 . . . pq)
= (Bp0p1 . . . pq) − (Bp0 . . . pq) + · · ·+ (−1)q+1(Bp0 . . . pq)
= σ − B((p0p1 . . . pq) − (p0p1 . . . pq) + · · ·+ (−1)q(p0 . . . pq))
= σ − B(
q∑
i=0
(−1)i(po . . . pi . . . pq))
= σ − B∂σ
para q = 0 sea c ∈ Sq(A), con c =∑i
vixi, para xi ∈ X tenemos que
∂(B, xi) = xi − B, de lo cual concluimos
∂Bc =∑
i
vi∂(B, xi) =∑
i
vixi −∑
i
viB = c−∑
i
viB

5.2. EL OPERADOR SUBDIVISION 89
5.2. El operador Subdivision
Ahora estamos listos para definir Sd y T , lo haremos de tal forma que sitenemos f : X → Y , entonces los diagramas
Sq(X) Sd//
Sq(f)
��
Sq(X)
Sq(f)
��
Sq(Y ) Sd// Sq(Y )
Sq(X) T//
Sq(f)
��
Sq+1(X)
Sq+1(f)
��
Sq(Y ) T// Sq+1(Y )
sean conmutativos.
Proposicion 5.0.2. Sea σ ∈ Sq(X), tenemos que
Sd σ = Sq(σ) Sd δq
Tσ = Sq+1(σ)Tδq
Demostracion. Por la conmutatividad de los diagramas, como δq ∈ Sq(∆q) ySq(σ)(δq) = σ tenemos lo que buscamos.
Las funciones seran definidas recursivamente, esto es
Definicion 5.0.3. Para X = ∆q y δq ∈ Sq(∆q) la identidad, definimos
Sd δq =
{δ0 q = 0
Bq Sd ∂δq q > 0
Tδq =
{0 q = 0
Bq(δq − Sd δq − T∂δq) q > 0
Donde Bq es el baricentro de ∆q, esto es,
Bq =
q∑
i=0
1
q + 1ei
Ejemplo 5.1. Veamos como actua Sd sobre δq para q = 0, 1, 2, 3.Esto lo podemos ver en la figura 5.1
Lema 5.0.1.
∂ Sd = Sd ∂
∂T = id− Sd−T∂

90 CAPITULO 5. EL TEOREMA DE ESCISION
Figura 5.1: Subdivision de un Simplejo
Demostracion. Por induccion sobre q, primero hagamoslo para Sd,para q = 0 tenemos ∂ Sd x = 0 = Sd ∂x, pues todo 0-simplejo tiene
frontera trivial y Sd es un homomorfismo, por lo que Sd(0) = 0.Supongamos que la igualdad es cierta para todo entero menor que q,verifiquemos
la igualdad para δq y luego usemos funtorialidad.
∂ Sd δq = ∂BqSdδq = Sd ∂δq −Bq∂ Sd ∂δq
Esto por la proposicion 5.0.1.pero por hipotesis de induccion,
Bq(∂ Sd ∂δq) = Bq(Sd ∂2δq) = 0
Ahora para T , ∂Tδ0 = ∂0 = 0, por otro lado,
idδ0 − Sd δ0 − T∂δ0 = δ0 − δ0 − 0 = 0
.suponiendo cierta la igualdad para cada entero menor que q, tenemos que
∂Tδq = ∂Bq(δq − Sd δq − T∂δq)
= δq − Sd δq − T∂δq −Bq∂(δq − Sd δq − T∂δq)
= δq − Sd δq − T∂δq −Bq(∂δq − ∂ Sd δq − ∂T∂δq)
Ahora, ∂ Sd δq = Sd ∂δq ,mientras que
∂T∂δq = ∂δq − Sd ∂δq − T∂2δq

5.3. DIAMETRO DE LA SUBDIVISION 91
por hipotesis de induccion. De esta forma tenemos que
∂Tδq = δq − Sd δq − T∂δq − Bq(∂δq − Sd ∂δq − ∂δq + Sd ∂δq + T∂2δq)
= δq − Sd δq − T∂δq − Bq(0)
= δq − Sd δq − T∂δq
Que es la igualdad deseada para δq. Ahora verifiquemos la igualdad paraun simplejo singular σ, y quedara establecida para cualquier q-cadena singu-lar de X.
∂ Sd σ = ∂ SdSq(σ)δq
= ∂Sq(σ) Sd δq
= Sq−1(σ)∂ Sd δq
= Sq−1(σ) Sd ∂δq
= SdSq−1(σ)∂δq
= Sd ∂Sq(σ)δq
= Sd ∂σ
Para T tenemos
∂Tσ = ∂Sq+1(σ)Tδq
= Sq(σ)∂Tδq
= Sq(σ)(δq − Sd δq − T∂δq)
= Sq(σ)δq − Sq(σ) Sd δq − Sq(σ)T∂δq
= σ − SdSq(σ)δq − TSq−1(σ)∂δq
= σ − Sd σ − T∂Sq(σ)δq
= σ − Sd σ − T∂σ
Que es lo que queriamos demostrar
5.3. Diametro de la Subdivision
Ahora veamos que pasa en los espacios afines, sea σ = (po . . . pq) unmapeo afın en el espacio afın A, como ∆q es compacto, tenemos que σ(∆q)es compacto en A.

92 CAPITULO 5. EL TEOREMA DE ESCISION
Definicion 5.0.4. Sea (X, d) un espacio metrico, U ⊂ X subconjunto de X,definimos el diametro de U , denotado por D(U) como
sup{d(x, y) : x, y ∈ U}
Para ahorrar notacion denotamos D(σ(∆q)) como d(σ) y lo llamaremossimplemente como diametro de σ. Sabemos que todo compacto metrico esacotado, por lo tanto d(σ) es finito, mas aun, podemos calcular el valor ded(σ), veamos esto despues del siguiente Lema.
Lema 5.0.2. Sea σ = (p0 . . . p1), x, y ∈ σ(∆q), entonces
||x− y|| ≤ max0≤i≤q
||x− pi||
Demostracion. Ahora, sean x, y ∈ σ(∆q), x =q∑
i=0
vipi, y =q∑
i=0
wipi donde
vi, wi ≥ 0 y∑vi =
∑wi = 1
ahora,
‖x− y‖ =
∥∥∥∥∥
q∑
i=0
vi(pi − y)
∥∥∥∥∥ ≤ vi ‖pi − y‖
sabemos que ‖pk − y‖ ≤ max0≤i≤q
‖pi − y‖ para cada k, de lo cual tenemos que
q∑
k=0
vk ‖pk − y‖ ≤
q∑
k=0
vk(max0≤i≤q
‖pi − y‖) = max0≤i≤q
‖pi − y‖
y con esto
‖x− y| | ≤ max0≤i≤q
‖pi − y‖
Proposicion 5.0.3. d(σ) es el maximo de las longitudes de las aristas delsimplejo σ(∆q)
Demostracion. Sea L = max0≤i,j≤q
‖pi − pj‖ donde σ = (p0 . . . pq), queremos ver
que L = d(σ).Como {‖pi − pj‖ : 0 ≤ i, j ≤ q} es un conjunto finito, existen i0, j0 donde
se alcanza el maximo, esto es, L = ‖pi0 − pj0‖ ≤ d(σ).

5.3. DIAMETRO DE LA SUBDIVISION 93
Ahora, repitiendo el argumento del lema anterior con pi tenemos que
‖pi − y‖ ≤ max0≤j≤q
‖pi − pj‖
para cada i. De lo cual obtenemos
‖x− y‖ ≤ max0≤i≤q
‖pi − y‖ max0≤i,j≤q
‖pi − pj‖ = L
Para todo x, y en σ(∆q), tomando supremo del lado izquierdo obtenemos qued(σ) ≤ L
Lema 5.0.3. Sea σ = (p0 . . . pq), cada simplejo que aparece en la cadenaSd σ tiene diametro menor que
q
q + 1d(σ)
Demostracion. Sea σ = (p0 . . . pq) con x ∈ σ(∆q), x =q∑
i=0
aipi, sabemos que
‖x− pi|‖ ≤ d(σ), ahora
‖x− pi‖ =
∥∥∥∥∥
q∑
j=0
aj(pi − pj)
∥∥∥∥∥ ≤∑
j 6=i
aj ‖pi − pj‖ ≤∑
j 6=i
aj( max0≤i,j≤q
‖pi − pj‖) = (1−ai)d(σ).
En particular, para el baricentro B =q∑
i=0
1q+1
pi tenemos
‖pi − B‖ ≤
(1 −
1
q + 1
)d(σ) =
q
q + 1d(σ)
y como vimos antes, tenemos que
||x−B|| ≤ maxi
||pi − B|| ≤q
q + 1d(σ)
Ahora hagamos induccion sobre q para probar lo que buscamos:Para q = 0 el resultado es cierto, pues d(σ) = 0. Supongamos cierto para
q − 1, comoSd σ = Bq Sd ∂σ
para simplejos afines, tenemos que si τ es un simplejo de la subdivision Sd σ,entonces τ = Bqτ
′ para alguno de los simplejos de la descomposicion de

94 CAPITULO 5. EL TEOREMA DE ESCISION
Sd ∂σ, mas precisamente, τ ′ es uno de los simplejos de la descomposicion deSd ρ para un ρ en la descomposicion de ∂σ.
De esta forma ρ(∆q) ⊂ σ(∆q) por lo que d(ρ) ≤ d(σ)Ahora, por hipotesis de induccion para τ ′ y Sd ρ tenemos que
d(τ ′) ≤q − 1
qd(ρ) ≤
q − 1
qd(σ) ≤
q
q + 1d(σ)
Estimemos la distancia entre los vertices de τ y veamos que ninguno superaesta cota.
Si τ = (r0 . . . rq), entonces r0 = Bq por construccion, de esta forma sii, j 6= 0, ||ri − rj|| ≤
qq+1
d(σ) pues los vertices ri, rj son vertices de
τ ′ = (r1 . . . rq) donde se cumple la desigualdad.De otra forma, si uno de los vertices es Bq, como ri ∈ σ(∆q), por la
proposicion 5.0.3 tenemos que ||Bq − ri|| ≤ ||Bq − pj || para algun j, peroentonces
||Bq − ri|| ≤ ||Bq − pj ||
=
∥∥∥∥∥
q∑
i=0
1
q + 1pi − pj
∥∥∥∥∥
=
∥∥∥∥∥∑
i6=j
1
q + 1(pi − pj)
∥∥∥∥∥
≤∑
6=j
∥∥∥∥1
q + 1(pi − pj)
∥∥∥∥
=1
q + 1
∑
i6=j
||pi − pj||
≤1
q + 1
∑
i6=j
d(σ)
=q
q + 1d(σ)
Que es lo que queriamos demostrar
Para probar lo que queremos, necesitamos un pequeno resultado tecnicopara espacios metricos compactos, este resultado aplicado a ∆q nos dara loque queremos, veamos esto

5.4. EL TEOREMA DE EXCISION 95
Teorema 5.1 (De la cubierta de Lebesgue). Sea (X, d) un espacio metrico,y U = {Ui}i∈I una cubierta abierta de X.Entonces existe ǫ tal que todosubconjunto de X de diametro menor que ǫ esta contenido en uno de losabiertos Ui con Ui ∈ U .
Demostracion. Para cada x ∈ X sea rx ∈ R tal que Brx(x) ⊂ Ui para alguni ∈ I.
De esta forma tenemos que {Brx/2(x)}x∈X es una cubierta abierta de X,por lo que existe una subcubierta finita Brx1
/2(x1),Brx2/2(x2), . . . ,Brxn/2
(xn).Sea ǫ = mın
1≤i≤nrxi/2, de esta forma, si A ⊂ X con D(A) < ǫ y x ∈ A
entoncesBǫ(x) ⊂ Bǫ(xk) ⊂ B rxk
/2(xk)
para algun k con 1 ≤ k ≤ n.pero como Brxk
/2(xk) ⊂ Uα para algun α ∈ I entonces x ∈ Uα y como xes arbitrario, tenemos que A ⊂ Uα.
5.4. El Teorema de Excision
Teorema 5.2. Sea σ un complejo singular en X, U una cubierta abiertade X. Entonces existe un r tal que Sdr(σ) es una combinacion lineal decomplejos singulares pequenos de orden U
Demostracion. Sea U ′ la cubierta abierta de ∆q dada por U ′i = σ−1(Ui).
Como ∆q es un espacio metrico completo, para cada x, existe ǫ tal que Bǫ(x)esta en uno de los abiertos, digamos U ′
ix , esto es, σ(Bǫ(x)) ⊂ Uix
Como lımr→∞
(q
q+1
)= 0, existe r tal que Sdr δq es una combinacion lineal
de simplejos de diametro menor que ǫ.Por funtorialidad tenemos que Sdr σ = Sq(σ) Sdr(δq), con lo que se cumple
lo que queriamos.
Corolario 5.2.1. Sea z ∈ Sq(X), U una cubierta abierta de X. Entoncesexiste un r tal que Sdr(z) es una combinacion lineal de simplejos singularespequenos de orden U
Demostracion. Si z =∑i
σi, aplicamos el teorema anterior a cada uno de los
σi y como Sd es homomorfimos tenemos lo que buscamos.

96 CAPITULO 5. EL TEOREMA DE ESCISION
Hasta este momento, hemos visto que dada una q-cadena z ∈ Sq(X),podemos hacerla tan pequena como queramos, en terminos de que podemosdividirla en pedazos mas pequenos que cualquier recubrimiento abierto delespacio, pero hasta este momento no hemos comparado z con Sd z, el siguienteteorema nos afirma que en efecto, son homologos relativos a A.
Teorema 5.3. Sea z ∈ Zq(X,A), entonces
z − Sd z ∈ Bq(X,A)
Demostracion. Del lema 5.0.1 sabemos que
∂Tz = z − Sd z − T∂z
Esto es,
z − Sd z = ∂Tz + T∂z
Como ∂z ∈ Sq−1(A), tenemos que T∂z ∈ Sq−1(A). Por otro lado, ∂Tz ∈Bq(X,A) pues Bq(X) ⊂ Bq(X,A).
De esta forma tenemos z − Sd z ∈ Bq(X,A)
Ahora podemos enunciar y probar el teorema de escision, intuitivamentenos dice que si tenemos un subespacio U suficientemente pequeno, podemosomitir U en (X,A) de manera que no se afecta la homologıa de (X,A),formalmente definimos una escision de la siguiente forma.
Definicion 5.3.1. Sea X espacio topologico, con U ⊂ A ⊂ X, decimos queU puede ser excindido del par (X,A) si la inclusion
i : (X\U,A\U) → (X,A)
induce un isomorfismo
Hq(i) : Hq(X\U,A\U) → Hq(X,A)
Teorema 5.4 (Teorema de Excision). Si clU ⊂ A◦ entonces U puede serexcidido.

5.4. EL TEOREMA DE EXCISION 97
Demostracion. Demostraremos que Hq(i) : Hq(X\U,A\U) → Hq(X,A) esbiyectiva.
Para ver que Hq(i) es suprayectiva, sea c + Bq(X,A) ∈ Hq(X,A), comoclU ⊂ Ao tenemos que {X\ clU,Ao} es una cubierta abierta de X.
Por el teorema tenemos que existe r tal que Sdr c = z donde z =∑i
σi,
de tal forma que σi es pequeno de orden {X\ clU,Ao}.Ahora, si σi0 no manda ∆q en X−U , como X\ clU ⊂ X\U , tenemos que
σi0(∆q) ⊂ Ao ⊂ A, de esta manera
σi0 ∈ Bq(X,A) y podemos omitirlo de∑i
σi, obteniendo un ciclo homo-
logo.
De esta forma podemos suponer que z =∑i
σi donde σi(∆q) ⊂ X\U para
cada i.Y como σi manda ∆q fuera de U , cada uno de los simplejos de ∂σi
tambien lo hace, agregando el hecho de que ∂σi ∈ Sq−1(A) tenemos quez ∈ Zq(X\U,A\U).
Por lo que
Hq(i)(z +Bq(X\U,A\U)) = c+Bq(X,A)
Y se sigue que Hq(i) es sobre.
Veamos que Hq(i) es uno a uno.Sea z ∈ Zq(X\U,A\U) tal que Hq(i)(z) = 0.Esto es, que z ∈ Bq(X,A) por lo que existen z′ una q-cadena en A y w
una (q + 1)-cadena en X tales que
z = z′ + ∂w
Por el teorema 5.2 existe r tal que Sdr w es combinacion lineal de simplejosde orden {X\ clU,Ao}, por lo que podemos escribir
Sdr w = w1 + w2
Donde los simplejos de w1 mandan ∆q+1 en X\U y los simplejos de w2
mandan ∆q+1 en A.De esta forma tenemos
Sdr z = Sdr z′ + ∂w1 + ∂w2,

98 CAPITULO 5. EL TEOREMA DE ESCISION
de lo cual
Sdr z − ∂w1 = Sdr z′ + ∂w2.
El lado izquierdo es una cadena en (X\U) mientras que el lado derechoes una cadena en A, de lo cual ambas son cadenas en A\U , en particular ellado derecho.
De esto tenemos que Sdr z es homologo a una cadena en A\U , por lo que
Sdr z ∈ Bq(X\U,A\U)
Como la clase de z y Sdr z son las mismas en Hq(X\U,A\U) tenemos quez +Bq(X\U,A\U) = Bq(X\U,A\U) = 0 en Hq(X\U,A\U).
De esta forma Hq(i) es uno a uno.
Corolario 5.4.1. Sea X espacio topologico con A ⊂ X, V ⊂ U ⊂ A, Supon-gamos, ademas que
V puede ser escindido
(X\U,A\U) es un retracto de deformacion de (X\V,A\V )
Entonces U puede ser escindido.
Demostracion. Sean
j : (X\V,A\V ) → (X,A)
i : (X\U,A\U) → (X\V,A\V )
la inclusion de cada subespacio respectivamente, tenemos que la primerainduce un isomorfimo
Hq(j) : Hq(X\V ) → (A\V )
Ademas, existe r : (X\V,A\V ) → (X\U,A\U) una retraccion, esto es,que
ri : (X\U,A\U) → (X\U,A\U) es la identidad
ir : (X\V,A\V ) → (X\V,A\V ) es homotopica a una aplicacion con-stante.

5.4. EL TEOREMA DE EXCISION 99
Si llamamos idU , idV a la funcion indentidad de cada espacio respectivamente,y id las identidades en los modulos de homologıa, por el teorema de invarianzahomotopica, tenemos que
id = Hq(idU) = Hq(ri) = Hq(r)Hq(i)
id = Hq(idV ) = Hq(ir) = Hq(i)Hq(r)
De esta manera Hq(i) y Hq(r) son biyectivas, una inversa de la otra y como
ji : (X\U,A\U) → (X,A)
es la inclusion, y Hq(j) es isomorfimo, tenemos que Hq(ji) es isomorfimo, porlo que U puede ser excindido.
El corolario al teorema de escision es importante, ya que nos dice que nonecesitamos que se den las condiciones del teorema de escision sino con quese den las condiciones al nivel de homotopıa es suficiente para poder escindirel subespacio que buscamos, condicion mucho mas debil que usaremos en elproximo capıtulo.
El teorema de escision es muy importante para calcular la homologıa deciertos espacios, en particular nos servira para calcular la homologıa de lasesferas y plantear algunas aplicaciones importantes.

100 CAPITULO 5. EL TEOREMA DE ESCISION

Capıtulo 6
Aplicaciones
6.1. La homologıa de las Esferas
6.1.1. La esfera y el Disco
Cuando calculamos la homologıa de un espacio topologico, a menos queX tenga una estructura muy simple como la de un punto por ejemplo us-ar la definicion es algoritmicamente imposible, pues tendriamos que identi-ficar Sq(X), Bq(X) y Zq(X), hacer el cociente e identificar con algun moduloconocido. Esto pasa porque Sq(X), Bq(X) y Zq(X) por lo general son muygrandes, esto es, la mayoria de las veces tienen una infinidad no numerablede generadores, pues como recordamos son espacios de funciones.
Una de las grandes ventajas de los modulos de homologıa con respecto aotras estructuras, es que gracias a la teorıa establecida hasta este momento,es relativamente facil calcular la homologıa de muchos espacios.
En particular usaremos el teorema de escision y la sucesion exacta dehomologıa y el teorema de invarianza homotopica para calcular la homologıade las esferas Sn para cada n, lo cual no podrıamos hacer si no tubieramosestas herramientas , por lo que el alto nivel de abstraccion al que hemosllegado hasta ahora rendira fruto.
Primero veamos algunos detalles al respecto.
Sn = {x ∈ Rn : ||x|| = 1} dotado de la topologıa relativa de Rn+1.
Ahora definiremos algunos subespacios de Sn.
Definicion 6.0.1. Definimos el hemisferio norte y el hemisferio sur de Sn
101

102 CAPITULO 6. APLICACIONES
como
E+n = {(x1, . . . , xn+1) ∈ Sn : xn+1 ≥ 0}
E−n = {(x1, . . . , xn+1) ∈ Sn : xn+1 ≤ 0}
Definimos el ecuador de la esfera Sn como E+n ∩ E−
n , esto es,
{(x1, x2, . . . , xn+1) ∈ Sn : xn+1 = 0}
Recordemos que En = {x ∈ Rn : ||x|| ≤ 1}, el disco n-dimensional es unespacio contractible, ademas sabemos que la esfera Sn−1 es la frontera deldisco En , ahora podemos ver que son los otros espacios
Proposicion 6.0.1. Cada uno de los hemisferios E+n y E−
n es homeomorfoal disco En, el ecuador E+
n ∩E−n es homeomorfo a Sn−1.
Demostracion. Como Sea x ∈ E+n con x = (x1, . . . , xn+1), definimos f :
E+n → En como
f(x1, . . . , xn+1) = (x1, x3, . . . , xn)
f es continua pues es continua por componentes ya que las proyecciones soncontinuas.
Sea (x1, . . . , xn) ∈ En, y a =
√1 −
n∑i=0
x2i , de esta forma tenemos que
a2 + x21 + · · ·+ x2
n = 1 −n∑
i=0
x2i +
n∑
i=0
x2i = 1
Por lo que (x1, . . . , xn, a) ∈ Sn.Ademas a ≥ 0, por lo que (x1, . . . , xn, a) ∈ E+
n y por lo tanto f es sobre.Para ver que f es uno a uno, basta ver que si f(x1, . . . , xn+1) = f(y1, . . . , yn+1),
entonces xi = yi para 1 ≤ i ≤ n, y como xn+1 =
√1 −
n∑i=1
x2i tenemos que
xn+1 = yn+1, por lo que f es uno a uno.Como f es continua y biyectiva, E+
n es compacto y En es Hausdorff,tenemos que f es un homeomorfimo. La prueba para E−
n es analoga.Para el ecuador tenemos que si x ∈ E+
n ∩E−n , x = (x1, . . . , xn+1), entonces
xn+1 = 0 yn∑
i=1
x2i = 1, definimos f(x1, . . . , xn+1) = (x1, . . . , xn) y la prueba
de que f es un homeomorfismo es analoga.

6.1. LA HOMOLOGIA DE LAS ESFERAS 103
Con esta proposicion, como cada esfera Sn es homeomorfa al ecuador deSn+1 no distinguiremos entre estos dos, hablaremos del ecuador de Sn comoSn−1, de esta forma ya podemos enunciar el siguiente resultado
Teorema 6.1. Sea n ≥ 1, entonces
i : (E+n , S
n−1) → (Sn, E−n )
es una escision, esto es, (E−n )o puede ser excindido de (Sn, E−
n )
Demostracion. Sea V el subespacio de Sn
V = {x = (x1, . . . , xn+1) ∈ Sn : xn+1 < −1/2}
En la figura 6.1 tenemos una imagen de V cuando q = 2
Figura 6.1: Escision para la esfera S2
Como
clV = {(x : xn+1 ≤ −1/2} ⊂ {x : xn+1 < 0} = (E−n )o
Por el teorema de escision tenemos que V puede ser excindido.Pero (E+
n , Sn−1) es un retracto de deformacion de (X\V,E−
n \V ), por elcorolario 5.4.1 tenemos que (E−
n )o puede ser excindido.
6.1.2. Homologıa de Sn
Teorema 6.2. El homomorfismo de enlace ∂ : Hq(En, Sn−1) → Hq−1(S
n−1)es un isomorfismo para toda q ≥ 2

104 CAPITULO 6. APLICACIONES
Demostracion. Como En es contractible tenemos Hq(En) = 0 para toda
q ≥ 1, de esta forma, como la sucesion
0Hq(j)
// Hq(En, Sn−1)
∂// Hq−1(S
n−1)Hq(i)
// 0
Es exacta, por un lado, ker ∂ = ImHq(j) = 0 por lo que ∂ es uno a uno.Por otro lado, Im ∂ = kerHq(i) = Hq−1(S
n−1) por lo que ∂ es sobre.Deducimos de esto que ∂ es biyectiva y por lo tanto es un isomorfismo.
Esto es suficiente para calcular la homologıa de las esferas
Teorema 6.3. Sea q > 0, entonces
Hq(Sn) =
{R q = n0 q 6= n
Hq(En, Sn−1) =
{R q = n0 q 6= n
Demostracion. Sabemos que el homomorfismo de enlace
∂ : Hq(En, Sn−1) → Hq−1(S
n−1)
es un isomorfismo para toda q ≥ 2.Por otro lado, como E−
n es contractible, tomando un punto x0 ∈ E−n ,
por el cororalio al teorema de escision i′ : Hq(Sn, x0) → Hq(S
n, E−n ) es un
isomorfismo donde i′ : E‘n− → Sn es la inclusion, esto implica que
Hq(j) : Hq(Sn) → Hq(S
n, E−n )
Es un isomorfismo para q ≥ 2 y n ≥ 1.Ademas de que
Hq(i) : Hq(E+n , S
n−1) → (Sn, E−n )
es un isomorfismo por el teorema de escison, por lo que haciendo composicion,tenemos que
∂Hq(i)−1Hq(j) : Hq(S
n) → Hq−1(Sn−1)
Es un isomorfismo para q ≥ 2 y n ≥ 1

6.1. LA HOMOLOGIA DE LAS ESFERAS 105
Como la sucesion
0 → H1(En, Sn−1) → H0(S
n−1) → H0(En) → 0
Es exacta, para n > 1 tenemos la sucesion exacta
0 → H1(En, Sn−1) → R → R → 0
como H0(i) : R → R es sobre, por el primer teorema de isomorfismo tenemosque R = ImH0(i) ∼= R/ kerH0(i) de lo que deducimos que kerH0(i) = {0}y por lo tanto H0(i) es un isomorfismo, entonces es un isomorfismo, de estamanera, ∂ : H1(E
n, Sn−1) → R es el morfismo 0, pues Im ∂ = kerHq(i) = 0y como ∂ es uno a uno tenemos que H1(E
n, Sn−1) = 0.Para n = 1 tenemos que S0 tiene dos componentes arcoconexas, por lo
que H0(S0) = R× R, de esta forma tenemos la sucesion exacta.
0 → H1(E1, S0) → R× R→ R→ 0
donde ∂ : H1(E1, S0) → R×R es uno a uno y Hq(i) : R×R → R es sobre,
por el primer teorema de isomorfismo kerHq(i) ∼= R de lo cual tenemos queIm ∂ = R de nuevo por el primer teorema de isomorfismo H1(E
1, S0) ∼= R.Resumiendo
H1(En, Sn−1) =
{0 n > 1R n = 1
De esta manera tenemos lo que buscamos, iterando n y q, mas en concreto
Hq(Sn) ∼= Hq(E
n, Sn−1)
Para q = n tenemos R = H1(S1) = H2(S
2) . . .Hn(Sn)Para n 6= q con n > 1 tenemos dos casos,Para 1 < n < q tenemos
Hq(Sn) = Hq−1(S
n−1) = · · · = Hq−(n−1)(S1) = 0 pues q-(n-1)¿1
Para 1 < q < n tenemos
Hq(Sn) = Hq−1(S
n−1) = · · · = H1)(Sn−(q−1)) = 0 pues n-(q-1)¿1
Corolario 6.3.1. Sn−1 no es un retracto de deformacion de En
Demostracion. Si ası fuera serıa homotopicos y de esta manera, sus modulosde homologıa serıan isomorfos, lo cual no es el caso.
De esta forma la esfera y el disco no pueden ser homeomorfos, ni siquierahomotopicos, un hecho intuitivamente obvio pero difıcil de probar.

106 CAPITULO 6. APLICACIONES
6.2. El teorema de Brouwer
Ahora deduciremos un teorema de gran importancia para la matematicaen general, probado por Brouwer en 1910.
Teorema 6.4 (Teorema del Punto Fijo de Brouwer). Toda funcion continua
f : En → En
tiene un punto fijo.
Demostracion. Supongamos que f : En → En es continua y no tiene puntosfijos, sea x ∈ D y nos fijamos en el segmento que va de f(x) a x, de estaforma, proyectamos sobre la esfera Sn−1 en la direccion de f(x) a x y a esepunto le llamamos r(x) como lo ilustra la figura 6.2 para n = 1.
Figura 6.2: El Teorema de Brouwer
Es facil ver que r es continua pues puede expresarse en terminos de lascoordenas, siendo producto de composicion de funciones continuas.
Ademas r es una retraccion fuerte de la esfera en el disco, lo cual no esposible pues estos no pueden ser homotopicos.
Cabe senalar que el teorema de punto fijo de Brouwer es fundamentaldentro y fuera de la topologıa y que este no admite una prueba elemental, apesar de lo simple de su enunciado.

6.3. ISOMETRIAS EN LA ESFERA 107
6.3. Isometrıas en la esfera
Una isometrıa en Rn es una funcion f : Rn → Rn que preserva distancias,es facil ver que esto pasa si y solo si preserva el producto interior usual deRn.
Estamos interesados en las isometrıas que mandan en el 0, de manera queno estamos interesados en traslaciones, estas isometrıas mandan la esfera enla esfera y ademas estan completamente determinada por lo que hace en laesfera Sn−1, mas aun son transformaciones lineales y forman un grupo.
Definicion 6.4.1. Definimos el grupo general lineal de (n,R) como el con-junto de todas las matrices invertibles de n × n con coeficientes en R y lodenotaremos por GL(n,R).
Podemos ver que en efecto, GL(n,R) es un grupo con la operacion pro-ducto de matrices.
Definicion 6.4.2. Definimos el grupo Ortogonal (n,R) como el conjunto detodas las matrices cuadradas invertibles de n× n con coeficientes en R talesque su inversa es igual a su transpuesta y lo denotaremos por O(n,R)
Podemos ver que en efecto, O(n,R) es un grupo con la operacion productode matrices y por definicion tenemos O(n,R) ≤ GL(n,R). Como detA =detAT y si A ∈ O(n) entonces AAT = I tenemos que 1 = (detA)2, por loque detA = ±1.
Definimos SO(n,R) ≤ O(n,R) como el subgrupo de matrices de deter-minante 1, es llamado el grupo especial ortogonal.
Estos grupos tienen una interpretacion geometrica muy importante, cadaisometrıa que manda el origen al origen tiene por matrız de representacionuna matrız de O(n,R), mas aun, las matrices de SO(n,R) determinan lasrotaciones mientras que las demas determinan traslaciones.
Estamos interesados en Hq(T ) donde T ∈ O(n,R), veamos que pasa conlas rotaciones
Proposicion 6.4.1. Sea T ∈ SO(n+ 1,R), entonces Hq(T ) es la identidaden Sn.

108 CAPITULO 6. APLICACIONES
Demostracion. Podemos representar una rotacion como producto de rota-ciones elementales, esto es, si definimos Rθ,1,2 como
cos θ − sen θ 0 0 0 . . . 0sen θ cos θ 0 0 0 . . . 0
0 0 1 0 0 . . . 00 0 0 1 0 . . . 0...0 . . . 1
Esta es una rotacion en angulo θ con sobre el plano determinado por e1, e2, sidefinimos Rθ,i,j intercambiando el orden de la base tendremos una matriz deforma muy similar, simplemento permutando los renglones y columnas (1, 2)por los renglones y columnas (i, j).
Toda rotacion se puede ver como producto de este tipo de rotacioneselementales, ası que veamos que Hq(Rθ,i,j) es la identidad.
Sea
F (x, t) = R(1−t)θ,i,j(x)
Esta es una homotopıa que manda Rθ,i,j en la identidad, por lo que delteorema de invarianza homotopica tenemos que Hq(Rθ,i,j) = idHq(X) que eslo que queriamos demostrar.
Para clasificar Hq(f) cuando f es una reflexion veamos un caso particulary con este construiremos cualquier caso
Proposicion 6.4.2. sea f(x0, . . . , xn, xn) = (1x0, . . . , xn) entonces
Hq(f)(x) = −x
en Hq(Sn).
Demostracion. Por induccion sobre n
Veamos el caso n = 0, para un 0-simplejo p0, esto es, σ(x) = p0, tenemosque
Hq(f)(p0) = −p0 = −p0
Por lo tanto Hq(f)(x) = −x que es lo que queriamos .

6.4. CAMPOS VECTORIALES EN LA ESFERA SN 109
Para n ≥ 0, si llamamos ϕ a nuestro isomorfismo usamos la conmutativi-dad del siguiente diagrama
Hn(Sn)ϕ
//
Hn(f)
��
Hn−1(Sn−1)
Hn−1(f)��
Hn(Sn)ϕ
// Hn−1(Sn−1)
Esto es,ϕ(Hn(f)((c))) = ϕ(−c)
Como ϕ es un isomorfismo, esto pasa si y solo si Hq(f)(c) = −c.
Teorema 6.5. Sea g ∈ O(n+ 1,R) entonces
Hn(g)(c) = (det g)(c)
Demostracion. Si g ∈ SO(n+1,R), por proposicion 6.3 tenemos Hq(g)(x) =det g(x). Supongamos que det g = −1, y sea r(x0, . . . , xn) = (−x0, . . . , xn),como det(r) = −1 tenemos que det rg = 1.
Ahora,c = Hq(rg)(c) = Hq(r)Hq(g)(c) = −Hq(g)(c)
Por lo tantoHq(g)(c) = −c
Que es lo que queriamos demostrar.
Corolario 6.5.1. Sea f el mapeo antipodal, esto es, f(x) = −x, entoncesHq(f) es multiplicacion por (−1)det f
Demostracion. f(x) = −Ix, donde I es la matriz identidad.
6.4. Campos vectoriales en la esfera Sn
Otra forma de probar el teorema de punto fijo de Brouwer es a travez deun resultado, conocido coloquialmente como el teorema de la bola peluda.Esto porque, a grandes rasgos el teorema afirma que no podemos peinar unaesfera de manera que no tengamos remolinos.
Mas en concreto, necesitamos ver que entendemos por peinar la esfera.Un campo vectorial en Sn es una funcion continua v : Sn → Rn+1 tal que x

110 CAPITULO 6. APLICACIONES
es perpendicular a v(x) para cada x ∈ Sn, esto tiene sentido pues x y v(x)son vectores en Rn+1. Si anclamos v(x) en el punto x obtenemos una formade peinar la esfera, pues v(x) resulta ser un vector tangente a Sn para cadax ∈ X, decimos que v es no nulo si v(x) 6= 0 para cada x ∈ X.
De esta forma el teorema de la bola peluda se enuncia de esta forma.
Teorema 6.6. Sn tiene un campo vectorial no nulo si y solo si n es impar
Demostracion. Si n es impar , digamos n = 2k + 1 tenemos que v definidode la siguiente forma
v(x0, . . . , x2k+1) = (−x1, x0,−x3, x2, . . . ,−x2k+1), x2k
Es un campo vectorial no nulo.Ahora, para n par supongamos que v cumple la condicion, entonces
w)(x) =x
v(x)
Es una funcion Sn → Sn con x · w(x) = 0 para todo x ∈ Sn como loilustra la figura 6.3.
Figura 6.3: Campos Vectoriales en la Esfera Sn
SeaF (x, t) = x cos(πt) + w(x) sen(πt)
Esta funcion define una homotopıa tal que F (x, 0) = x, F (x, 1/2) = w(x),F (x, 1) = −x
De esta manera, id ≃ w ≃ a, esto es, son funciones homotopicas, dondea es el mapeo antipodal, es decir, a(x) = −x por lo que la identidad es

6.4. CAMPOS VECTORIALES EN LA ESFERA SN 111
homotopica al mapeo antipodal, pero Hq(id) = id, y Hq(a)(x) = −x, estoes, de esta forma el mapeo antipodal no es homotopica a una aplicacionconstante y tenemos una contradiccion

112 CAPITULO 6. APLICACIONES

Apendice. Categorias y
Funtores
Dado un espacio topologico X, en el capıtulo 2 definimos para cada qun modulo Hq(X), y dada una funcion continua f : X → Y definimos unhomomorfismo de modulos
Hq(f) : Hq(X) → Hq(Y )
Tal que Hq de la identidad es la identidad y Hq de una composicion defunciones continuas es la composicion de homomorfismos.
Estos conceptos se pueden generalizar a otras estructuras con el conceptode categorıa
Definicion .6.1. Una categoria C consta de tres partes
Una coleccion ObjC a cuyos elementos llamaremos objetos de C
Para cada par de objetos A,B un conjunto HomC(A,B); los elementosde HomC(A,B) seran llamados morfismos de A en B.
Dados tres objetos A,B,C, una regla de composicion de morfismos,esto es, dados g ∈ HomC(A,B), f ∈ HomC(B,C), existe un morfismo
f ◦ g ∈ HomC(A,C)
Que cumplen las siguientes propiedades
1. Asociatividad. Dados h ∈ HomC(A,B), g ∈ HomC(B,C), f ∈ HomC(C,D)tenemos f ◦ (g ◦ h) = (f ◦ g) ◦ h
113

114 CAPITULO 6. APLICACIONES
2. Elemento neutro. Para cada objeto A, existe un morfismo 1A ∈HomC(A,A) tal que para cada f ∈ HomC(A,B) y para cada g ∈HomC(B,A) tenemos que f ◦ 1A = f,1A ◦ g = g.
Cabe hacer algunas aclaraciones en este momento. Obj(C) no tiene porqueser un conjunto, podrıa serlo pero no necesariamente. Ilustremos esta situacionpara una categorıa.
Sea C = Set la categorıa de todos los conjuntos, podemos ver que Obj(C)no es un conjunto, pues el conjunto de todos los conjuntos no existe, si esteobjeto existiera se nos presentarıa la paradoja de Russell, la cual la podemosver en [5], pagina 13.
Sin embargo si definimos HomC(A,B) como las funciones de A en B y lacomposicion de funciones usual obtenemos una categoria, ası que podemostrabajar con familias aunque estas no sean conjuntos.
El concepto de clase soluciona este problema y existe una axiomatizacionde esto conocida como Bernays − Go o simplemente BG, la cual podemosencontrar en [5], pagina 321.
Para lo que vamos a trabajar en momento no necesitamos mas herramien-ta, solo basta ver a una clase como todo aquello que ponemos a la derechadel simbolo ∈ y que no necesariamente puede ponerse a la izquierda.
Denotamos f : A→ B si f ∈ HomC(A,B) aunque f no tiene porque seruna funcion. Ası mismo f ◦g no tiene porque ser la composicion de funcionesusual.
Para mostrar lo general de la teorıa veamos algunos ejemplos.
Ejemplo .1. La categoria Set.ObjSet es la clase de todos los conjuntos, Hom(A,B) es el conjunto de
funciones de A en B, y la composicion de morfismos es la composicion defunciones usual.
Ejemplo .2. La categoria Top.ObjTop es la clase de todos los espaciones topologicos, Hom(A,B) son
las funciones continuas de A en B y la composicion de morfismos es la com-posicion usual de funciones.
Ejemplo .3. Las categorias Gr y Ab. Los objetos de la primera es la clasede todos los grupos y de la segunda, la clase de todos los grupos abelianos,Hom(A,B) es el conjunto de homomorfismos de grupo de A en B, respecti-vamente con la composicion usual de funciones.

6.4. CAMPOS VECTORIALES EN LA ESFERA SN 115
Ejemplo .4. Las categorias Ring y Rng.Ring es la categoria de anillos con elemento unitario, y Rng es la ca-
tegoria de anillos en general, Hom(A,B) son los homomorfismos de anilloscon la composicion correspondiente.
Ejemplo .5. La categoria Met.Los objetos de esta categoria son los espacios metricos. Uno podria pensar
que los morfismos entre estos objetos son las funciones continuas, pero lanocion de que dos espacios metricos sean iguales es que sean isometricos.
De esta manera, podemos definir Hom(A,B) como las contracciones deA en B con la composicion de funciones usual.
Ejemplo .6. Las categorıas VecF ModR y RMod.Espacios vectoriales sobre un campo fijo F , R-modulos derechos y R-
modulos izquierdos respectivamente. Hom(A,B) es el conjunto de transfor-maciones lineales de A en B, o el conjunto de homomorfismos de modulosrespectivamente.
Ejemplo .7. Af La categorıa de todos los espacios afines. Hom(A,B) sontodos las transformaciones afines con la composicion usual.
Ejemplo .8. La categoria Graf.ObjGraf es la clase de todas las graficas finitas. Un homomorfismo de
graficas es una funcion que manda vertices en vertices y aristas en aristas.Hom(A,B) es el conjunto de homomorfismos de graficas con la composicionusual.
Ejemplo .9. Sea G un grupo, definimos la categorıa G .ObjG = G, si g, h ∈ G definimos Hom(g, h) = {gh−1} y la composicion
de morfismos viene dada por multiplicacion del grupo.Esta es una categoria pues Hom(g, g) = {gg−1} = {e} que resulta ser el
morfismo identidad.
Estas ası como muchas otras estructuras de naturaleza algebraica, analıtica,topologica, o de incluso ninguna de estas son categorias.
Dos elementos son equivalentes de alguna forma si podemos ir del uno alotro con un morfismo biyectivo, esto lo tomamos de esta forma, pues comodefinimos nuestras estructuras, los morfismos buscamos que conserven estaestructura. En abstracto esta es la definicion.

116 CAPITULO 6. APLICACIONES
Definicion .6.2. Sea C una categoria, A,B ∈ ObjC, decimos que A y B sonisomorfos si existen morfismos f ∈ Hom(A,B) y g ∈ Hom(B,A) tales quefg = 1B y gf = 1A.
Ejemplo .10. Sea C = Top, entonces dos objetos isomorfos, resultan ser dosespacios topologicos homeomorfos.
De manera analoga con los morfismos entre objetos, queremos relacionardos categorias de alguna forma, aquı tenemos el concepto.
Definicion .6.3. Sean C y D categorias, un funtor F es un transformacionF : ObjC → ObjD, donde denontando F (A) o FA a la imagen de A ∈ ObjCtenemos que:
Para cada par de objetos A,B ∈ C, existe un transformacion
F : HomC(A,B) → HomD(FA, FB)
tal que a cada morfismo ϕ ∈ HomC(A,B) tenemos un morfismo Fϕ
Hay compatibilidad con las composiciones, es decir, si ϕ : A→ B ψ : B → Centonces tenemos que F (ψϕ) = F (ψ)F (ϕ).
para cada objeto A ∈ C tenemos que F (1A) = 1F (A).
Es importante notar, que aunque estamos usando F para denotar el trans-formacion entre objetos, y cada uno de los transformacion entre morfismos,estos son diferentes entre si, pese a esto, usaremos la misma letra, dandosentido a la funcionalidad de F de acuerdo al contexto.
Ahora, podemos ver que un funtor relaciona las tres partes de una cate-goria, los cuales son, los objetos, los morfismos y la regla de correspondencia,conservando identidades.
En nuestra definicion de funtor el sentido de todas las flechas se conserva,esto es, si ϕ : A → B entonces Fϕ : FA → FB; este tipo de funtores sonllamados funtores covariantes, cuando el sentido de las flechas y el sentidode la composicion se invierten, entonces el funtor recibe en nombre de fun-tor contravariante. En esta tesis todos nuestros funtores seran covariantes,los funtores contravariantes aparecen, por ejemplo, cuando trabajamos concohomologıa.
Ahora si, en terminos de categorıas, podemos establecer el sentido funto-rial de la homologıa.

6.4. CAMPOS VECTORIALES EN LA ESFERA SN 117
Ejemplo .11. para cada q tenemos que Hq es un funtor entre las categoriasTop y RMod. Las propiedades que tenemos que verificar han sido establecidasen la seccion anterior.
Lo importante de las relaciones funtoriales entre categorias, es que de laspropiedades establecidas anteriormente, un funtor manda dos objetos isomor-fos en la primera categoria en dos objetos isomorfos en la segunda. Que laimagen de dos objetos sea isomorfa en la segunda, en general no nos garan-tiza la isomorfia de los objetos en la primera, pero puede establecer ciertaspropiedades en comun entre los objetos, de ahi la importancia de los funtores.
Pareciera que la teorıa se complica por la abstraccion, pero la idea esmas simple, pues por ejemplo, en nuestro caso es mas facil estudiar modulos,grupos abelianos o espacios vectoriales, que estudiar espacios topologicos,por lo que los funtores pueden ser muy importantes, y hasta fundamentalesen el estudio de estructuras aparentemente muy diferentes.

118 CAPITULO 6. APLICACIONES

Bibliografıa
[1] Dugundji James (1966)Topology , Editorial Allyn and Bacon Inc.
[2] Fraleigh John B. (1993)A basic course in Abstract Algebra(Fifh Edition), Ed-
itorial Addison Wesley.
[3] Fulton William(1991)Algebraic Topology, a first course,
[4] Greenberg Marvin (1967)Lectures on Algebraic Topology, Editorial Benjamon
Inc.Editorial Board.
[5] Hernandez Hernandez Fernando (2003)Introduccion a la teorıa de Conjuntos,
Aportaciones Matematicas, Sociedad Matematica Mexicana.
[6] Hungerford Thomas W. (1974)Algebra , Editorial Board.
[7] Kelley John L.(1955)General Topology, Editorial Board.
[8] Lang Serge (2002)Algebra (Third Edition), Editorial Board.
[9] Massey W.S.(1991)A basic course in Algebraic Topology, Editorial Board.
[10] Munkres James R.(1984)Elements of Algebraic Topology, Editorial Persers
Books.
[11] Munkres James Raymond (2000) Topology (Second Edition) , Editorial Pren-
tice Hall Inc.
[12] Nathan Jacobson(1951)Basic Concepts, Lectures in Abstract Algebra, Nos-
trand Company.
[13] Rotman Joseph (2003)Advanced Modern Algebra, Editorial Prentice Hall
119

120 BIBLIOGRAFIA
[14] Simmons G.F. (1963) Introduction to topology and modern analysis, Editorial
Mac Graw Hill.
[15] Wallace Andrew H.(1963)An introduction to Algebraic Topology, Editorial
Pergamon Press.