high-level development of embedded software development of embedded software gunar schirner1,...
TRANSCRIPT

System-Level Development of Embedded Software
Gunar Schirner1, Andreas Gerstlauer2, Rainer Dömer3
1) ECE, Northeastern University, Boston, MA2) University of Texas, Austin3) CECS, University of California, Irvine

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 2
Motivation
• Increasing complexity of Multi-Processor System-on-Chip (MPSoCs)– Feature demands– Production capabilities + Implementation freedom
• Increasing software content– Flexible solution– Addresses complexity
• How to create SW for MPSoC?– Avoid break in ESL flow:
• Synthesize SW from abstract models
Source: simh.trailing-edge.com
?
SW

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 3
Goals
• Generate SW binaries for MPSoCfrom abstract specification– Eliminate tedious, error prone SW coding– Rapid exploration– High-level application developtment– Support wide range of system sizes
CE
...
Processor NExt. IP N1
Core Mem
Processor Bus N
PIC Timer
Processor 1Ext. IP 11
Core Mem
Processor Bus 1
PIC Timer
Ext. IP NM
...
MEM 11
MEM N1
... ...

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 4
System Design Flow Overview
Input Specification• Capture Application in C
(SpecC SLDL)– Computation
• Organize code in behaviors (processes)
– Communicate through point-to-point channels
• Select from feature-rich selection
– Synchronous / Asynchronous– Blocking / Non-Blocking– Synchronization only (e.g.
semaphore, mutex, barrier)
• Architecture decisions:– Processor(s)– HW component(s)– Busses– Mapping– …
100M
Hz

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 5
Outline
• Introduction • System Design Flow Overview• Processor Modeling• Software Generation
– Code Generation– Hardware-dependent Software Synthesis
• Communication Synthesis• Multi-Tasking• Binary Image Creation
• Experimental Results• Conclusions

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 6
System Design Flow Overview
100M
Hz

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 7
Outline
• Introduction • System Design Flow Overview• Processor Modeling• Software Generation
– Code Generation– Hardware-dependent Software Synthesis
• Communication Synthesis• Multi-Tasking• Binary Image Creation
• Experimental Results• Conclusions

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 8
CPU
TaskB2
C1
B1
TaskB3C2
B4
Automatic TLM Generation• System Compiler (SCE)
generates System TLM
Model containscomplete implementation information
– TLM generation, processor modeling described in:• [Doemer et. al, JES 07/2008], [Gerstlauer et. al, TCAD 09/2007],
[Schirner et. al, TODAES 01/2010]
Processor Model: Overview
CoreHALOSCPU
TaskB2
C1
B1
TaskB3C2
RTOS MODEL
HWInt
TimerPIC
SourceStatusMask
ControlLoadValue
INTCINTBINTA
HW1B4
INT
INT
TLM
SysInt
Driv
erD
river
MA
C
INTA INTB INTC
UsrInt1 UsrInt2
MAC
Driver
Sem1Sem2

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 9
Processor Model
• Summary of features:

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 10
Outline
• Introduction • System Design Flow Overview• Processor Modeling• Software Generation
– Code Generation– Hardware-dependent Software Synthesis
• Communication Synthesis• Multi-Tasking• Binary Image Creation
• Experimental Results• Conclusions

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 11
Software SynthesisSecond step: Software Synthesis• Code Generation [Yu et. al, ASPDAC 2004]
– Generate application code– Resolve behavioral hierarchy into flat C code
• Hardware-dependent Software (HdS) Synthesis– Multi-task
Synthesis– Communication Synthesis– Binary Image
Generation
– Generate ISS-basedvirtual platform
Software Synthesis
Code Generation
HdS Generation
SW DB- RTOS- Wrapper- HAL
Cross Compiler and Linker
TLM
C Code Build,Config.
Target Binary
Virtual Platform Exec.Hardware Platform Exec.
CommunucationMulti-tasking
Binary Image
Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 12
Outline
• Introduction • System Design Flow Overview• Processor Modeling• Software Generation
– Code Generation– Hardware-dependent Software Synthesis
• Communication Synthesis• Multi-Tasking• Binary Image Creation
• Experimental Results• Conclusions

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 13
Code GenerationPE2
Bus
driv
er
PE1
B2 C1 B3
B1
S1
RTOS Model
ISR
Bus
driv
er
TaskB2
TaskB3
Task_PE
read()
write()
Code Generation
PE2
Bus
driv
er
PE1
S1
RTOS Model
ISR
Bus
driv
er read()
write()
C Code
Source: H. Yu, R Doemer, D.Gajski 2004
Rules for C code generation• Behaviors and channels are
converted into C struct• Child behaviors and channels
are instantiated as C structmembers inside the parent C struct
• Variables defined inside a behavior or channel are converted into data members of the corresponding C struct
• Ports of behavior or channel are converted into data members of the corresponding C struct
• Functions inside a behavior or channel are converted into global functions
• A static struct instantiation for each PE is added at the end of the output C code to allocate/initialize the data used by SW

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 14
C Code Generation Example
Source: H. Yu, R Doemer, D.Gajski 2004
Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 15
Outline
• Introduction • System Design Flow Overview• Processor Modeling• Software Generation
– Code Generation– Hardware-dependent Software Synthesis
• Communication Synthesis• Multi-Tasking• Binary Image Creation
• Experimental Results• Conclusions
Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 16
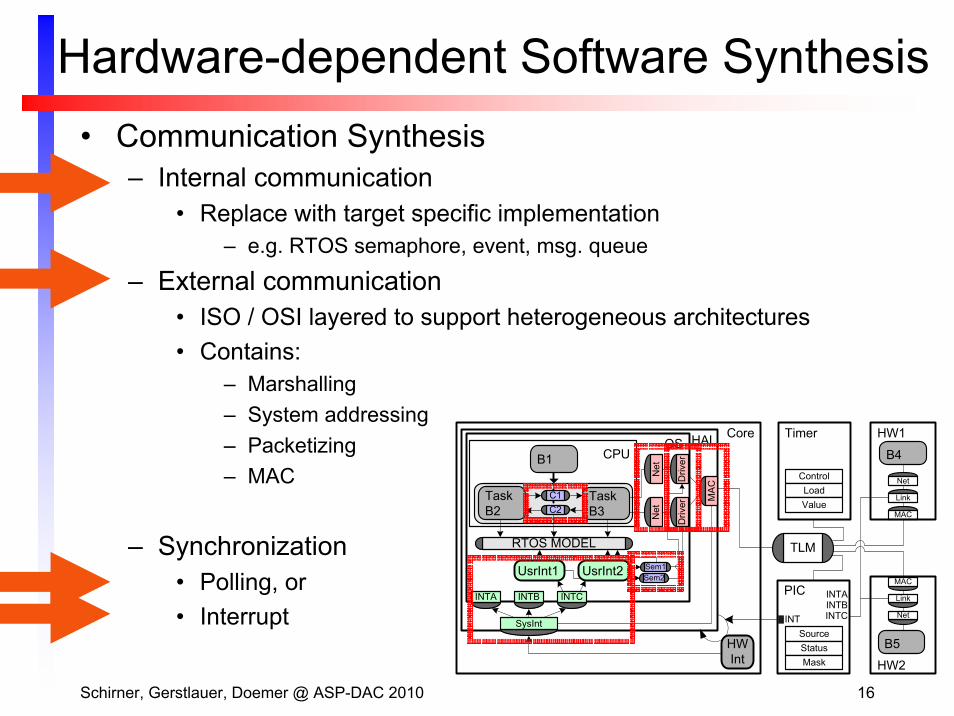
Hardware-dependent Software Synthesis• Communication Synthesis
– Internal communication• Replace with target specific implementation
– e.g. RTOS semaphore, event, msg. queue
– External communication• ISO / OSI layered to support heterogeneous architectures• Contains:
– Marshalling– System addressing– Packetizing– MAC
– Synchronization• Polling, or• Interrupt
CoreHALOSCPU
TaskB2 N
et
C1
B1
TaskB3C2
RTOS MODEL TLM
MA
C
HWInt
Timer
PIC
SourceStatusMask
ControlLoadValue
INT
INTA INTB INTC
UsrInt1
SysInt
Driv
erD
river
INTCINTBINTA
Sem2Sem1UsrInt2
Net
HW1
HW2
B4
B5
Net
MAC
Link
Net
MAC
Link

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 17
• Multi-Task Synthesis– RTOS-based Multi-Tasking
• Based on off the shelf RTOS – e.g. μC/OS-II, eCos, vxWorks
• RTOS Abstraction Layer– Canonical Interface
» limit interdependency RTOS / Synthesis• Generate task management code• Internal communication
Hardware-dependent Software Synthesis

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 18
behavior B2B3(RTOS os) {B2 b2();B3 b3();
void main(void) {
par {b2.main(); b3.main();
}o
};
1
5
10
15
Task_B2 task_b2(os);Task_B3 task_b3(os);
Task_B2 task_b2(os);Task_B3 task_b3(os);
task_b2.init();task_b3.init();
task_b2.init();task_b3.init();
os.par_start();os.par_start();
os.par_end();os.par_end();
• Multi-task Synthesis– Example
struct B2B3{ struct Task_B2 task_b2;
struct Task_B3 task_b3;};void *B2_main(void *arg){ struct Task_B2 *this=(struct Task_B2*)arg;
...pthread_exit(NULL); }
void *B3_main(void *arg){ struct Task_B3 *this=(struct Task_B3*)arg;
...pthread_exit(NULL); }
void *B2B3_main(void *arg){ struct B2B3 *this= (struct B2B3*)arg;
int status; pthread_t *task_b2, *task_b3;
}
taskCreate(task_b2, NULL, B2_main, &this->task_b2);
taskCreate(task_b3, NULL,B3_main, &this->task_b3);
taskCreate(task_b2, NULL, B2_main, &this->task_b2);
taskCreate(task_b3, NULL,B3_main, &this->task_b3);
taskJoin(*task_b2, (void **)&status);taskJoin(*task_b3, (void **)&status);
taskJoin(*task_b2, (void **)&status);taskJoin(*task_b3, (void **)&status);
taskTerminate(NULL);taskTerminate(NULL);
Source: H. Yu, R Doemer, D.Gajski 2004
Hardware-dependent Software Synthesis
Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 19
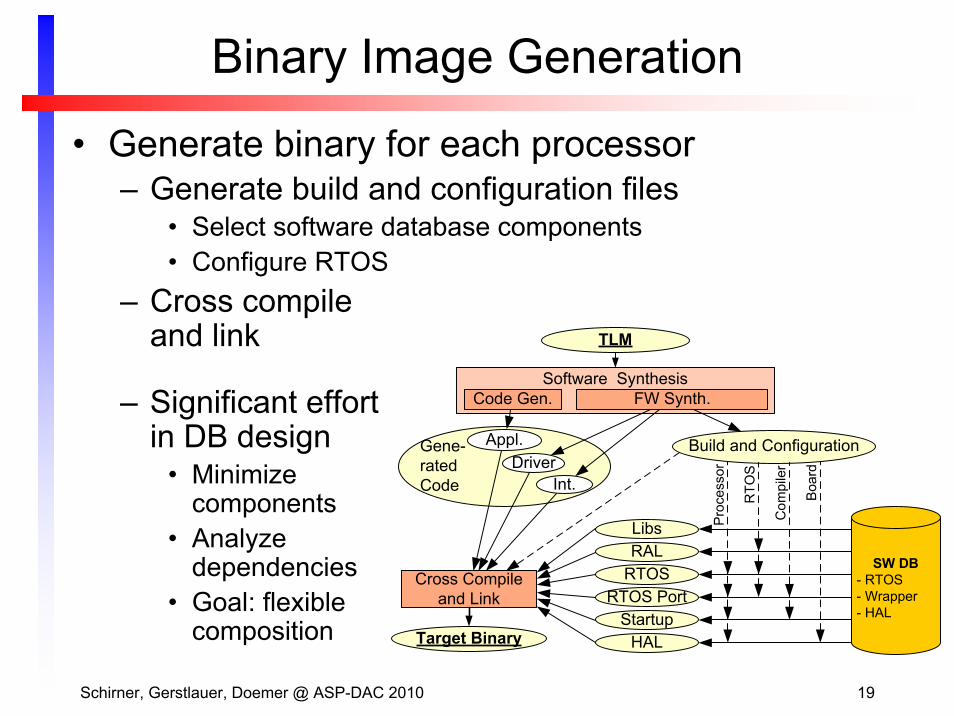
Binary Image Generation
• Generate binary for each processor– Generate build and configuration files
• Select software database components • Configure RTOS
– Cross compileand link
– Significant effortin DB design
• Minimize components
• Analyze dependencies
• Goal: flexible composition
Cross Compileand Link
Software Synthesis
TLM
Gene-ratedCode
Libs
Target Binary
SW DB- RTOS- Wrapper- HAL
Appl.Driver
Int.
Build and Configuration
RALRTOS
RTOS PortStartup
HAL
Pro
cess
or
RTO
S
Com
pile
r
Boa
rd
Code Gen. FW Synth.
Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 20
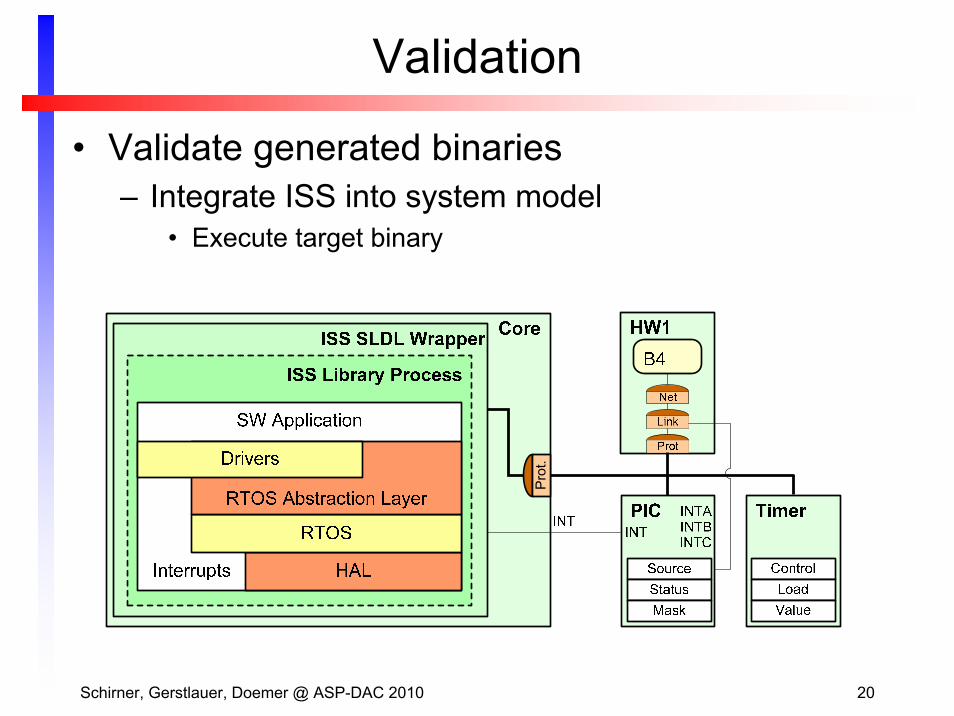
Validation
Prot
.
• Validate generated binaries– Integrate ISS into system model
• Execute target binary

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 21
Outline
• Introduction • System Design Flow Overview• Processor Modeling• Software Generation
– Code Generation– Hardware-dependent Software Synthesis
• Communication Synthesis• Multi-Tasking• Binary Image Creation
• Experimental Results• Conclusions

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 22
Experimental Results
• Automotive Example– ARM7TDMI / 2x CAN / Anti-Lock Brakes, RPM, Fan
• Multimedia Examples– JPEG, MP3 (w/o, w/ HW support)
ARM7TDMI
MP3
JPEG IRQFIQ
AMBA AHB
PIC
Cust. HWCust. HW Cust. HWMP3IN
BMPIN
JPEG Output
Cust. HWLeft
SYNTH
Cust. HWRight
SYNTH
Cust. HW
MADOuput
Cust. HWPCMOUT
DHS
INT0
INT31...
Timer
DHS
DHS

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 23
Experimental Results
0%
25%
50%
75%
100%
Aut
omot
ive
JPE
G
MP
3 S
W
MP
3 H
W
MP
3 H
W +
JPE
G
0 M
50 M
100 M
150 M
200 M
Aut
omot
ive
JPE
G
CPU Utilization CPU Cycles
MP
3 S
W
MP
3 H
W
MP
3 H
W +
JPE
G
0K
5K
10K
15K
Aut
omot
ive
JPE
G
MP
3 S
W
MP
3 H
W
MP
3 H
W +
JPE
G
Appl. HdS
Generated Lines (Appl., HdS)

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 24
Conclusions
• High-Level SW Development – Software Generation
• Code Generation• Hardware-dependent Software
– Communication synthesis– Multi-task synthesis– Binary image creation
– Seamlessly intergraded into ESL Flow• High-level specification, generate low-level implementation
– From abstract model to implementation!• Eliminates tedious and error prone manual SW development• Significant productivity gain• Enables rapid design space exploration
Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 25
Acknowledgements
• SCE Research Team– Thanks for your support of the SCE environment

Schirner, Gerstlauer, Doemer @ ASP-DAC 2010 26
Thank You!