heap base coordinator finding with fault tolerant … · heap base coordinator finding with fault...
TRANSCRIPT

Heap Base Coordinator Finding with Fault Tolerant Method in Distributed Systems
Mehdi EffatParvar 1, AmirMasoud Rahmani2, MohammadReza EffatParvar3, Mehdi Dehghan4 1 ECE Department, Islamic Azad University- Ardabil Branch, Ardabil, Iran
2 ECE Department, Islamic Azad University- Tehran Since and Research Branch, Tehran, Iran 3 ECE Department of Tehran University, Tehran, Iran
4 Computer and IT Eng Department of AmirKabir University of Technology, Tehran, Iran
Abstract Coordinator finding in wireless networks is a very
important problem, and this problem is solved by suitable algorithms. The main goals of coordinator finding are synchronizing the processes at optimal using of the resources. Many different algorithms have been presented for coordinator finding. The most important leader election algorithms are the Bully and Ring algorithms. In this paper we analyze and compare these algorithms with together and we propose new approach with fault tolerant mechanisms base on heap for coordinator finding in wireless environment. Our algorithm's running time and message complexity compare favorably with existing algorithms. Our work involves substantial modifications of an existing algorithm and its proof, and we adapt the existing algorithms to the noisy environment base on fault tolerant mechanisms.
1. Introduction
Election of a leader is a fundamental problem in
distributed computing. It has been the subject of intensive research since its important was first articulated by Gerard Lelann [1]. The practical importance of election in a distributed computing is further emphasized by Garcia Molina’s Bully algorithm [3].
In a pure distributed system, there is no central controlling processor that arbitrates decisions. Without a central authority or coordinator, any processor has to communicate with all processors in the network to make decision. Often during the decision process, not all processors make the same decision. Communication between processors takes time and further more, making the decision takes time. Coordination among processors becomes difficult when consistency is needed among all processors.
Leader election is a technique that can be used to break the symmetry of distributed Systems [5].
Some applications of leader election include finding a spanning tree with the elected leader as root[18], breaking a deadlock , reconstructing a lost token in a token ring network, using leader election in Ad Hoc network [16,17].
Leader election algorithms for static networks have been proposed in [19]. These algorithms work by constructing several spanning trees with a prospective leader at the root of the spanning tree and recursively reducing the number of spanning trees to one. However, these algorithms work only if the topology remains static and hence cannot be used in a mobile setting [8, 9].
Leader election is a useful building block in distributed systems, whether wired or wireless, especially when failures can occur. For example, if a node failure causes the token to be lost in a mutual exclusion algorithm, then the other nodes can elect a new leader to hold a replacement token. Leader election can also be used in group communication protocols, to choose a new coordinator when the group membership changes. The standard definition of the leader election problem for static networks [4] is that:
1. Eventually there is a leader and 2. There should never be more than one leader. In general election algorithm attempt to locate the
process with the highest process number and designate it as coordinator the algorithm differ in the way they do the location. Furthermore we also assume that every process know the process number of every other process. What the processes do not know is which ones are currently up and which ones are currently down. The goal of an election algorithm is to ensure that when an election starts, it concludes whit all processes agreeing on who the new coordinator is to be.
Several leader election algorithms have been
proposed over the years [5-12]. Some of the grand election algorithms that we can mention to them are Bully algorithm, Ring algorithm, Chang and Roberts’ algorithm [13], Peterson’s election algorithm [15], Lelann’s algorithm [1], Franklin’s algorithm [14]. Such leader election algorithms proposed until now require processors to be directly involved in leader election. Information is exchanged between processors by transmitting messages to each other. The processors exchange messages with each other and try to reach an agreement. Once an agreement is reached, a processor will be elected as leader and all other processors will acknowledge the presence of the leader.
The rest of paper organized as follow: in section 2 we describe our modified Bully algorithm, section 3 propose the heap base election, in section 4 we explain the fault tolerant method base on heap tree, section 5 discusses
Mehdi Effat Parvar et al, Int. J. Comp. Tech. Appl., Vol 2 (4), 761-766
IJCTA | JULY-AUGUST 2011 Available [email protected]
761
ISSN:2229-6093

about analytical simulation and section 6 presents the conclusion and future works.
2. Modified Bully Algorithm with Fault
Tolerant Mechanism As it has been mentioned, in Bully algorithm the
number of messages that should be exchanged between processes is very high. In previous section we presented the new approach with sort mechanism and we decreased the number of messages. Bully with the sort mechanism has a little message passing, but it may consume more time in contrast with Bully algorithm to find the leader, we describe another approach to modify Bully. In this algorithm [2] when process P notices that the leader has crashed, it sends an election message to all processes with higher ID number.
Each process that receives election message sends its ID as a respond to process P. If no process responses to process P, it will broadcast one coordinator message to all processes. If some processes response to process P, it will select the process with the highest ID number as coordinator and that will send a new message with
selected ID number to all processes. In this manner all processes know the new leader. This approach is a suitable way to select the leader, but when the process with the highest ID number is sent, its message to process P maybe lost. So we want to present a fault tolerant mechanism to prevent this fault. To do this, when process P selected the highest ID number it sends the selected ID to all processes, now the new leader sends election message to processes with greater ID number to be sure that there is no process with great ID numbers. If a message is received from processes with great ID numbers, it introduces the greatest one as leader. Otherwise it remains the leader again.
In the rest of this paper we compare the number of message passing of these methods with together and also we compare them with Modified Ring algorithm [2].
3. Leader Election with Heap Tree
In this section we will describe other leader election
algorithm. In this method we use the heap tree for selecting the leader. Each node of the tree corresponds to an element of the array that stores the value in the node. The tree is completely filled on all levels except possibly the lowest, which is filled from the left up to a point. An array A that represents a heap is an object with two attributes: length [A], which is the number of elements in the array, and heap-size [A], the number of elements in the heap stored within array A. That is, although A[1 .. length[A]] may contain valid numbers, no element past A[heap-size[A]], where heap-size[A] ≤ length[A], is an element of the heap.
The root of the tree is A[1], and given the index i of a node, the indices of its parent PARENT(i), left child LEFT(i), and right child RIGHT(i) can be computed simply.
On most computers, the LEFT procedure can compute 2i in one instruction by simply shifting the binary representation of i left one bit position. Similarly, the RIGHT procedure can quickly compute 2i +1 by shifting the binary representation of i left one bit position and adding in a 1 as the low-order bit. The PARENT
procedure can compute 2/i by shifting i right one bit
position. There are two kinds of binary heaps: max-heaps and
min-heaps. The values in the nodes satisfy a heap property, the
specifics of which depend on the kind of heap. In a max-heap, the max-heap property is that for every node i other than the root, A[PARENT(i)] ≥ A[i ] , that is, the value of a node is at most the value of its parent. Thus, the largest element in a max-heap is stored at the root, and the sub tree rooted at a node contains values no larger than that contained at the node itself. A min-heap is organized in the opposite way; the min-heap property is that for every node i other than the root, A[PARENT(i)] ≤ A[i ] .
The smallest element in a min-heap is at the root. The MAX-HEAPIFY procedure, which runs in O(log n) time, is the key to maintaining the max-heap property.
(e) (f)
Figure 1: Process 2 notices the coordinator has crashed so sends an election message to processes 3,4,5(a), and receives OK message from processes 3,4 it means that Ok message of process 5 is failed (b), then process 4 is selected as a coordinator (c), and process 4 according to algorithm sends an election message and selects process 5 as a coordinator (d,e,f)
6 1
2
34
5
6 1
2
34
5
OK
6 1
2
34
5
6 1
2
34
5
Coo
rdin
ator
(c) (d)
6 1
2
34
5
6 1
2
34
5Coordinator=4
6 1
2
34
5
6 1
2
34
5
Ele
ctio
n
Elect
ion
(a) (b)
6 1
2
34
5
6 1
2
34
5Election
Election
Ele
ctio
n
6 1
2
34
5
6 1
2
34
5OK
OK
OK
Mehdi Effat Parvar et al, Int. J. Comp. Tech. Appl., Vol 2 (4), 761-766
IJCTA | JULY-AUGUST 2011 Available [email protected]
762
ISSN:2229-6093
Metho
Max Hea
Bully
Ring
The BUILlinear time, input array.
The MMAX, HMAXIMUMallow the hequeue.
After expmethod by usmax heap toalgorithm wealso the nodeabout the oth
In this msave the infodata item stothe data itemheaps using binary trees implement hnodes in thenodes on eacnode in the ielement heapwhen we woperations onthe height of
In new mjoining to eafathers ID anID, node chreconstruct aour root has b
When a pstarts sendinmessage goe
left and righID with togenot necessaryIDs or elect by it reaches
od
ToMem
need nod
ap 4
LD-MAX-HEproduces a M
MAX-HEAP-INHEAP-INCREAM procedures,
eap data struc
plaining the hsing the heap
o explain our e don’t need e doesn’t needher nodes. ethod each noormation abouored in each n
ms stored in itsa linked list lbut in this in
heaps using ae heap from tch level fromith location ofp based on a bwant to recon heaps run i
f the tree and tmethod by heap
ach node, thennd then if its ange its locat
again. When thbeen deleted i
process noticeng the elect es up to delet
ht children of ether to determy for all procemessage in th
s to its father
Table
tal mory for all des
Ord
log
EAP procedurMax-Heap fro
NSERT, HEASE-KEY, which run in
cture to be u
heap we intentree characteralgorithm andany ring for cd to have com
ode that joinsut its parent anode is greates children. Welike structure,nstance it is
arrays. We simtop to bottom
m left to right f the array. Thbinary tree is loonstruct the in time at mothus take O(lop tree, node cn it will be co ID is greaterte with its fahe leader crasin tree. s that the lead
message to ted roots child
the deleted romine the newesses to start she tree. The ein the tree an
e 1: Comparison
der M
Mess
log
2
re, which runom an unord
EAP-EXTRAand HE
n O(log n) tused as a prio
d to describeristics. We used unlike the Rconnect to gr
mplete informa
s to group shand children. r than or equa
e could implem, like we did wactually easiemply number
m, numberingand store the he height of aog n; so it is gtree. The b
st proportionaog n) time. can join to trempare its ID wr than the fat
ather and the shed it means
der has crasheits father.
dren and then
oot compare tw leader. So sending their
elect message nd at this mom
n of the Leader
in sages
MMes
log
2
ns in dered
ACT-EAP-time, ority
e our e the Ring oup; ation
ould The
al to ment with er to r the g the
i th an n-good basic al to
e by with thers tree that
ed, it This
n the
their it is own sent
ment
the the thenmesmetsuitbullmetfathmemn . algo
4.T
whe
Finoco
Election algori
Max sages
Numco
g 1
receiving produplicate m
n it drops by ssage send tothod the leadetable number ly algorithm thod each nodher, left and mory needed In table (1) y
orithms.
Fault ToleThe main proen two nodes
(c)
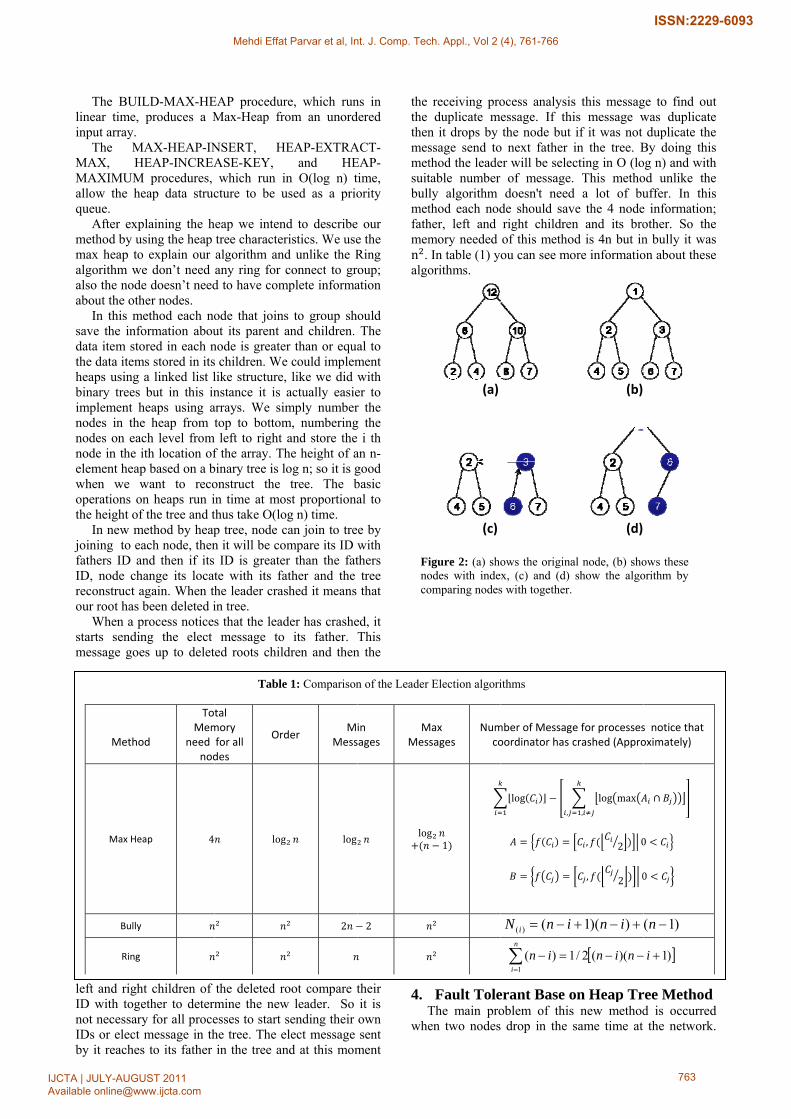
igure 2: (a) shoodes with indeomparing nodes
(a)
ithms
mber of Messagoordinator has
log,
()( inN i
n
i
in1
1)(
ocess analysisessage. If ththe node but
o next father er will be sele
of message.doesn't need
de should savright childrenof this methoou can see mo
erant Base ooblem of thiss drop in the
ows the originax, (c) and (d) s with together.
e for processescrashed (Appro
log max,
, 2 0
, 2 0
))(1 in
nin )((2/1
s this messagis message wif it was not in the tree. Bcting in O (lo. This method a lot of buve the 4 noden and its bro
od is 4n but inore informatio
on Heap Trs new methodsame time at
(d)
al node, (b) shoshow the algo
(b)
s notice that oximately)
0
0
)1( n
i )1
ge to find outwas duplicate
duplicate theBy doing thisog n) and withod unlike theuffer. In thise information;other. So then bully it wason about these
ree Methodd is occurredthe network.
ows these orithm by
t e e s h e s ; e s e
d .
Mehdi Effat Parvar et al, Int. J. Comp. Tech. Appl., Vol 2 (4), 761-766
IJCTA | JULY-AUGUST 2011 Available [email protected]
763
ISSN:2229-6093
This problemnodes speed
When thewhen the fatfinding the cthe propertyconnective.
Figure 3: (a)nodes with indchildren with doing the replanods from topof the tree, (i) to best position
We apply
heap tree; sothe new nodmessage to tit. The root new node inmessage to itree until it re
Briefly wthe root updahold the treprocess.
In this mnode positionthe root was and third nod
The root dthe tree; not nodes know the node in pi/2 it deter
brother, and
(
(e)
(a)
m maybe happand other genese dropped nther and one ocoordinator byy of the tree
) shows the ordex, (c) shows lower index deacement nods k to down doingwhen one newn.
y our methodo of first we cde want to athe root and thtry to build a
n the tree; theits father andeceives by the
we can say thaate its informee as a comp
method after tns number relthe first node
de in the heapdetermines theonly by theirtheir father b
position i noticrmines the nethe others sub
(h)
pens because neral network pnodes have aof its child cry this methodand the tree
riginal node, (the drop crash
etermine as a neknew by their ng this method, (
w node join to th
d in binary trconstruct the badd the tree.he root finds a complete tren the new no
d the Ack mese root. at in any add
mation about thplete tree in
the heap treeleased insteade and its childr. e nodes ID byr ID number.
by the positionces that its fat
ew father betwb tree will upd
(f)
(b)
of power limproblems. a same fatherrashed, we cand; because we will not rem
(b) shows theshed nods, (e) thew root, (f) afteew index, (g) ah) the final stat
he tree, it will g
ree instead ofbinary tree. W It sends a the best placeee so it insertode sends the ssage raise in
or delete prohe tree and it
n others inser
e constructedd of node ID's ren are the sec
y their position So after thatns of them. Wther is not exiween itself andate.
(i)
(g)
(c)
mited
r, or nnot lost
main
se he er all te
go
f the When
join e for t the Ack
n the
ocess t can rtion
d the ; so
cond
ns in t the
When ist in d its
Bin tand
5.A
sectWebetwthem
Ihavcras
W
tolepas
Istep
shomodshowith
T
Alg
Wh
Sthan
Fianpr
Nu
mb
er
of
me
ss
ag
ep
as
sin
g
By doing this the network, d finding the c
SimulationAfter describtion we will c
e will also comween the algom. In Modified B
ve previous pashed coordina
()(2
)()(
nin
inN i
Which has O
erant mechansing will incre
()(2
(2)(
in
inN i
In which 'i ip. The Order
ows the compdified Bully w
ows the messh fault toleran
The complexigorithm is [2]:
(0
nnin
i
hich has Order
So the compln the Ring Alg
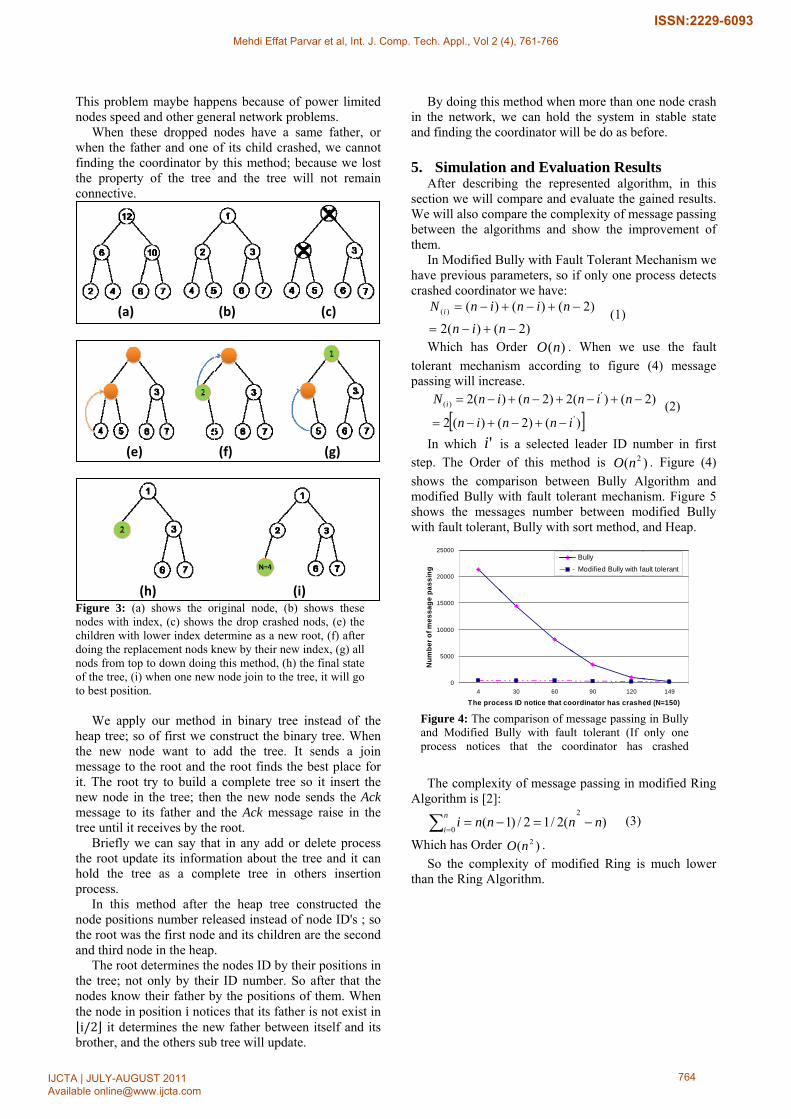
igure 4: The cond Modified Brocess notices
0
5000
10000
15000
20000
25000
4
The proce
Nu
mb
er
of
me
ss
ag
e p
as
sin
g
method whenwe can hold oordinator wi
n and Evalubing the reprecompare and empare the comorithms and
Bully with Fauarameters, so ator we have:
)2
()(
n
nin
Order )(nO .
nism accordinease.
()2(
2)2()
inn
ni
is a selected of this meth
parison betwewith fault tolesages numbernt, Bully with
ity of message
(2/12/)1 n
r )( 2nO .
lexity of modgorithm.
omparison of mBully with faul
that the co
30 60
ess ID notice that co
n more than onthe system in
ill be do as be
uation Resuesented algorevaluate the g
mplexity of meshow the imp
ult Tolerant Mif only one pr
)2 (1)
When we u
ng to figure
)()(2
'
'
i
nin
leader ID nuhod is )( 2nOeen Bully Aerant mechanir between mosort method, a
e passing in m
)2
nn (3)
dified Ring is
message passinglt tolerant (If
oordinator has
90 120
ordinator has crashe
Bully
Modified Bully with fa
ne node crashn stable statefore.
ults rithm, in thisgained results.essage passingprovement of
Mechanism werocess detects
use the fault
(4) message
)2 (2)
umber in first
) . Figure (4)
Algorithm andism. Figure 5odified Bullyand Heap.
modified Ring
s much lower
g in Bully only one
crashed
149
ed (N=150)
ault tolerant
h e
s .
g f
e s
t
e
t )
d 5 y
g
r
Mehdi Effat Parvar et al, Int. J. Comp. Tech. Appl., Vol 2 (4), 761-766
IJCTA | JULY-AUGUST 2011 Available [email protected]
764
ISSN:2229-6093

Figure 5modified Risimulation wprocesses in has been propassing in processes nconcurrently
In the sconsidered 1
In averagwith root, anroot crash inbrothers or o
Figure 6 s
Figure 6: Th(total crash) acrash) in the s
Figure 5: TModified Rconcurrently
Table
Process ID
4
30
60
90
120
149
shows the ing and Hewe assume tthe ring is 10
oducts randomdifferent stanotice that .
simulation of 0 nodes with e 13% of timnd in 21% of n the tree; thaone father and shows 20 time
he comparison oand root crash system
The comparisoning and Heap
y notice that coo
e 2: The number
Number of Message in Heap Tree
23
85
102
113
122
156
comparisonap Tree algthat the num0 and the topomly. The num
atus is showcoordinator
f fault toleran13 times run ies root and antimes two ot
at these nodesone child.
es of run in the
of faults betwe(when root an
n of message paTree when sevordinator has cr
r of message pa
Number of Message inBully with
fault toleran
442
385
341
270
205
150
n between Rgorithms. In mber of exisology of the Rmber of mes
wn when sevr has cras
nt heap tree in each state.nother node cther nodes elss are may be
e network.
een ordinary crand one of its ch
assing in Ring,veral processesrashed.
assing in Modif
n
nt Sent
messages
145
119
89
59
29
1
Ring, our
sting Ring sage veral shed
we
crash se of
two
Trecemecthe the occrecemesdeteselewithrandthessele
6.
EimpalgoAlgimpnewHeamesspentim
Asimalgoselealgoto ia sumesconthe Fintreeselemin
Ielecformdyn
ash hild
, s
fied Bully with
Received messages
133
110
32
51
20
0
Table 2 indieived messagchanism. For coordinator hprocesses w
currence of theeive all the mssages. So, 12ermination oected coordinah greater ID thdom and it ise processes aected and all th
Conclusion
Election Algoportant role inorithms for tgorithms. The proved these w other methoap tree methodssage complent to select leer. Another meth
multaneously orithm reduceect the leadorithm. In thismprove Ring uitable approassage comp
ncurrently notibandwidth a
ally we createe method. In ect the leadenimum order iIn future workction in ad hom. It is also pnamic environ
fault tolerant m
Number of fault
mesp
wit
12
9
57
8
9
0
icates the nue in modifiedexample, if t
has crashed, itwith larger IDe fault in the nmessages, ther2 faults have of the coordiator again senhan itself and is 7. It also rand finally thehe processes r
n and Futu
orithms in din the system this kind of wapproaches ptwo algorithm
od for selectind. In Bully wixity reduces
eader is a littl
hod to improvewith fault tes the numbeer, and we s paper a newAlgorithm. M
ach to leader plexity whice that the co
and message pe the other alg
this method er; and we in compare theks we will useoc and senso
possible to usenments.
mechanism and
ssage to rocess th larger
ID
Rm
fromwith
7
3
35
5
3
0
umber of faud Bully with the 4-th procet will send 145Ds. But, becnetwork, it is refore, it willoccurred. Afteinator by a nds messagesthis number i
receives 7 me main coordreceive its ID.
re Works
istributed sysoperation. T
work are Bupresented in thms and we p
ng the leader tith sort mechasignificantly,
le large becau
e Bully algoritolerant mecher of messag
compare it w method is alModified Ring
election and ihen severaloordinator hapassing will
gorithm that wwe use the shown this
e other algorite these algoritr network as
e the election
Heap Tree met
Received message m process h larger ID
Cm
7
3
35
5
3
0
ult, sent andfault tolerant
ess found that5 messages tocause of theimpossible tol receive 133er the primarymessage the
s to processesis produced at
messages frominator will be.
stem play anThe importantully and Ringhis paper havepresented thethat we call itanism [2], thebut the time
use we need a
thm was usedhanism. Thisge passing to
with Bullyso introduced
g Algorithm isit reduces thel processesas crashed. Sobe improved.
we call it Heapmax heap tomethod has
thms. thms to leader
a distributedalgorithms in
thod.
Coordinator messages
149
149
149
149
149
149
d t t o e o 3 y e s t
m e
n t g e e t e e a
d s o y d s e s o .
p o s
r d n
Mehdi Effat Parvar et al, Int. J. Comp. Tech. Appl., Vol 2 (4), 761-766
IJCTA | JULY-AUGUST 2011 Available [email protected]
765
ISSN:2229-6093

7. References [1] G. LeLann. “Distributed systems - towards a formal approach”, Information Processing Letters, 1977, pp. 155-160. [2] M. EffatParvar, M.R. EffatParvar, A. Bemana, M. Dehghan, “Determining a Central Controlling Processor with Fault Tolerant Method in Distributed System,” In Proc. of ITNG07, IEEE, May 2007. [3] H.Garcia-Molina. “Electronic in Distributed Computing System”. IEEE Transaction Computers, |Vol.C-31,pp. 48-59, Jan. 1982. [4] H. Attiya and J. L. Welch. Distributed Computing: Fundamentals, Simulations and Advanced Topics. London, UK: McGraw-Hill, 1998. [5] G. Fredrickson and N. Lynch, “The impact of synchronous communication on the problem of electing a leader in a ring,” in Proc. 16th Annu. ACM Symp. on Theory of Computing, Washington, D.C., 1984, pp. 493-503. [6] E. Gafni and Y. Afek, “Election and traversal in unidirectional networks,” in Proc. 3rd Annu. ACM Symp. on Principles of Distributed Computing, Vancouver, B.C., Canada, Aug. 1984, pp. 190-198. [7] R. G. Gallager, Choosing a leader in a network, Unpublished memorandum, M.I.T., Cambridge, Mass., 1977. [8] R. G. Gallager, P. M. Humblet, and P. M. Spira, “A distributed algorithm for minimum-weight spanning trees,” ACM Trans. Program. Lang. Syst., vol. 5, no. 1, pp. 66-77, Jan. 1983. [9] P. Humblet, “Selecting a leader in a clique in O(n log n) messages,” in Intern. Memo., Laboratory for Information and Decision Systems, M.I.T., Cambridge, Mass., 1984. [10] E. Korach, S. Moran, and S. Zaks, “Tight lower and upper bounds for some distributed algorithms for a complete network of processors,” in Proc. 3rd Annu. ACM Symp. on Principles of Distributed Computing, Vancouver, B.C., Canada, pp. 199-207, Aug. 1984. [11] I. Lavalléé and G. Roucairol, “A fully distributed (minimal) spanning tree algorithm,” Information Processing Letters, 23, pp. 55-62, Aug. 1986. [12] P. M. B. Vitanyi, “Distributed election in an Archimedean ring of processors,” in Proc. 16th Annu. ACM Symp. on Theory of Computing, Washington, D.C., pp. 542-547, 1984. [13] E. Chang and R. Roberts, “An improved algorithm for decentralized extrema-finding in circular configurations of processes,” Communications of the ACM}, pp. 281-283, 22, 5, 1979. [14] W. R. Franklin, “On an improved algorithm for decentralized extrema finding in circular configurations of processors,” Communication of the ACM, pp. 336-337, 25, 1982. [15] G. L. Peterson, “An O(nlogn) unidirectional algorithm for the circular extrema problem,” ACM Trans. Program. Lang. Syst. 758-762, 4,4 (Oct. 1982). [16] N. Malpani, J. Welch and N. Vaidya, “Leader Election Algorithms for Mobile Ad Hoc Networks,” In Fourth International Workshop on Discrete Algorithms and Methods for Mobile Computing and Communications, Boston, MA, August 2000. [17] P. Basu, N. Khan and T. Little, “A Mobility based metric for clustering in mobile ad hoc networks,” In International Workshop on Wireless Networks and Mobile Computing, Apr. 2001. [18] R. Gallager, P. Humblet and P. Spira, “A Distributed Algorithm for MinimumWeight Spanning Trees,” In ACM Transactions on Programming Languages and Systems, vol.4, no.1, pages 66-77, January 1983. [19] D. Peleg, “Time Optimal Leader Election in General Networks,” In Journal of Parallel and Distributed Computing, vol.8, no.1, pages 96-99, January 1990.
Mehdi Effat Parvar et al, Int. J. Comp. Tech. Appl., Vol 2 (4), 761-766
IJCTA | JULY-AUGUST 2011 Available [email protected]
766
ISSN:2229-6093