hardware-independent software development with autosar · 3 30 september, 2010 hardware-independent...
TRANSCRIPT

Hardware-independent Software Development with AUTOSAR
Dr. Stefan Bunzel – AUTOSAR Spokesperson (Continental)8. Workshop Automotive Software Engineering30 September, 2010, Leipzig
Hardware-independent Software Development with AUTOSAR30 September, 20102
Overview
� Introduction to AUTOSAR
� Overview on AUTOSAR Architecture
� AUTOSAR Development Methodology

Hardware-independent Software Development with AUTOSAR30 September, 20103
OEM f
Exchangeabilitybetween suppliers’solutions
Exchangeabilitybetween vehicle platforms
Exchangeabilitybetween manufacturers’applications
Platform d.nPlatform d.2Platform d.1
Platform e.nPlatform e.2Platform e.1
Platform f.nPlatform f.2Platform f.1
Platform c.nPlatform c.2Platform c.1
Platform a.nPlatform a.2Platform a.1
OEM e
OEM a
Platform b.nPlatform b.2Platform b.1
OEM b
OEM d
OEM c
AUTOSAR Vision
AUTOSAR aims to improve complexity management of integrated E/E architectures through increased reuse and exchangeability of SW modules between OEMs and suppliers.
Supplier A
�Chassis
�Safety
�Body/Comfort
Supplier B
�Chassis
�Safety
�Telematics
Supplier C
�Body/Comfort
�Powertrain
�Telematics
Hardware-independent Software Development with AUTOSAR30 September, 20104
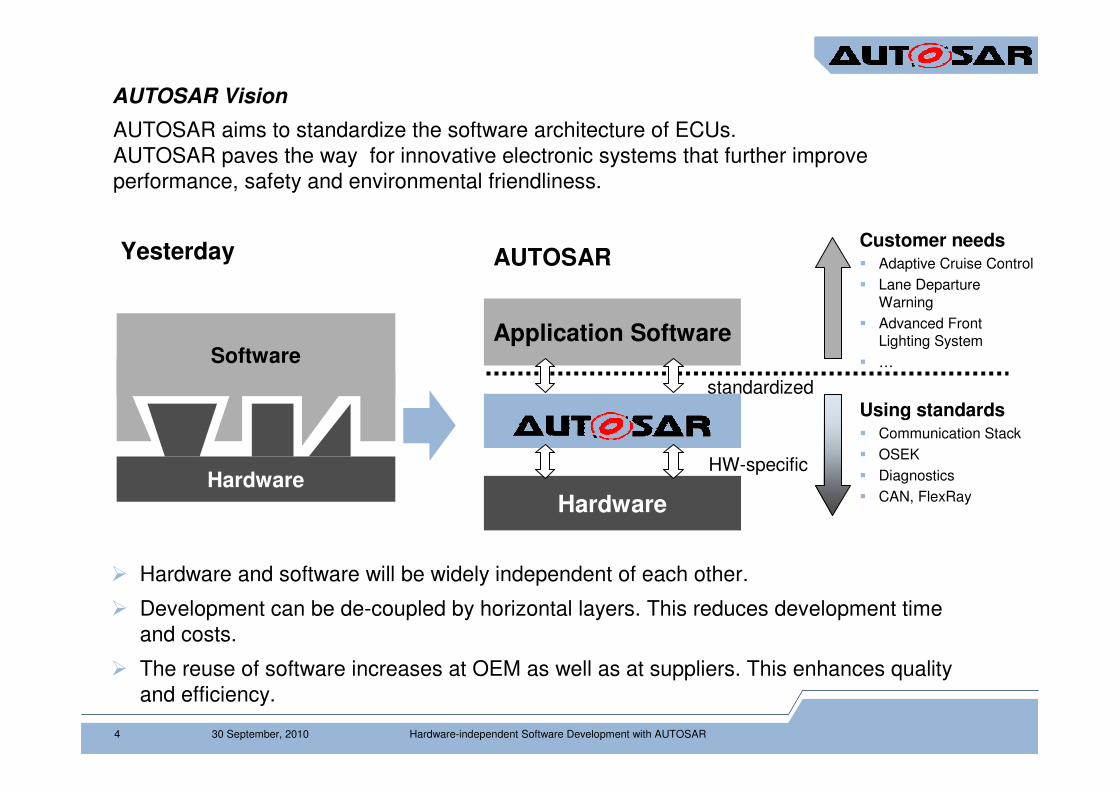
� Hardware and software will be widely independent of each other.
� Development can be de-coupled by horizontal layers. This reduces development time and costs.
� The reuse of software increases at OEM as well as at suppliers. This enhances quality and efficiency.
Yesterday
Application Software
Hardware
standardized
HW-specific
AUTOSARCustomer needs� Adaptive Cruise Control� Lane Departure
Warning� Advanced Front
Lighting System� …
Using standards� Communication Stack� OSEK� Diagnostics� CAN, FlexRay
Hardware
Software
AUTOSAR aims to standardize the software architecture of ECUs.AUTOSAR paves the way for innovative electronic systems that further improve performance, safety and environmental friendliness.
AUTOSAR Vision
Hardware-independent Software Development with AUTOSAR30 September, 20105
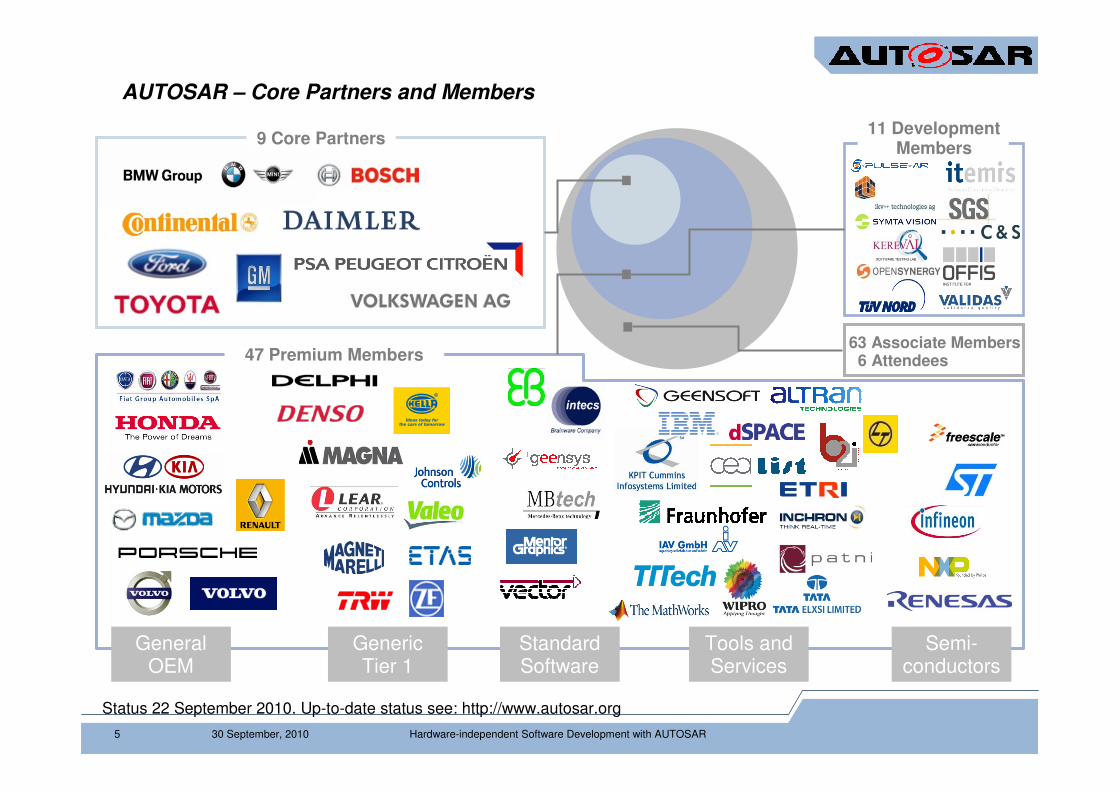
Status 22 September 2010. Up-to-date status see: http://www.autosar.org
AUTOSAR – Core Partners and Members
63 Associate Members6 Attendees
9 Core Partners
GeneralOEM
StandardSoftware
Semi-conductors
Tools andServices
GenericTier 1
11 Development Members
47 Premium Members
Hardware-independent Software Development with AUTOSAR30 September, 20106
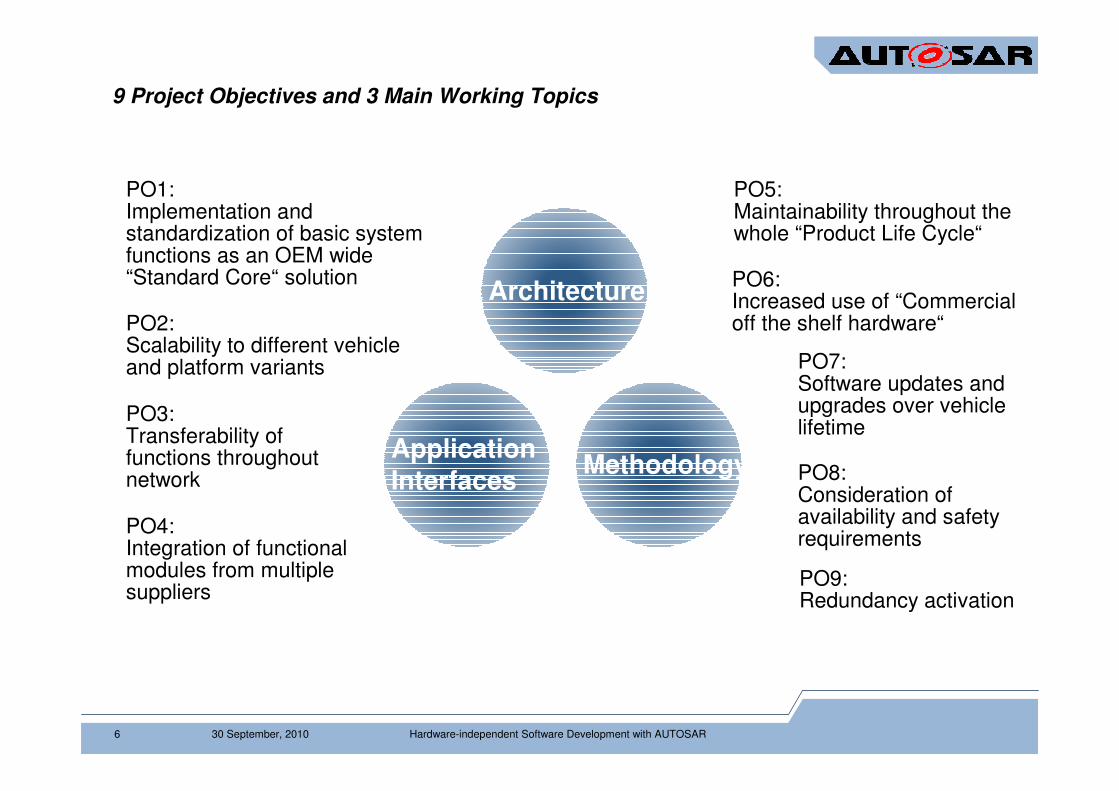
9 Project Objectives and 3 Main Working Topics
ApplicationInterfaces
Methodology
Architecture
PO1: Implementation and standardization of basic system functions as an OEM wide “Standard Core“ solution
PO2: Scalability to different vehicle and platform variants
PO3:Transferability of functions throughout network
PO4:Integration of functional modules from multiple suppliers
PO5:Maintainability throughout the whole “Product Life Cycle“
PO6:Increased use of “Commercial off the shelf hardware“
PO7:Software updates and upgrades over vehicle lifetime
PO8:Consideration of availability and safety requirements
PO9:Redundancy activation
Hardware-independent Software Development with AUTOSAR30 September, 20107
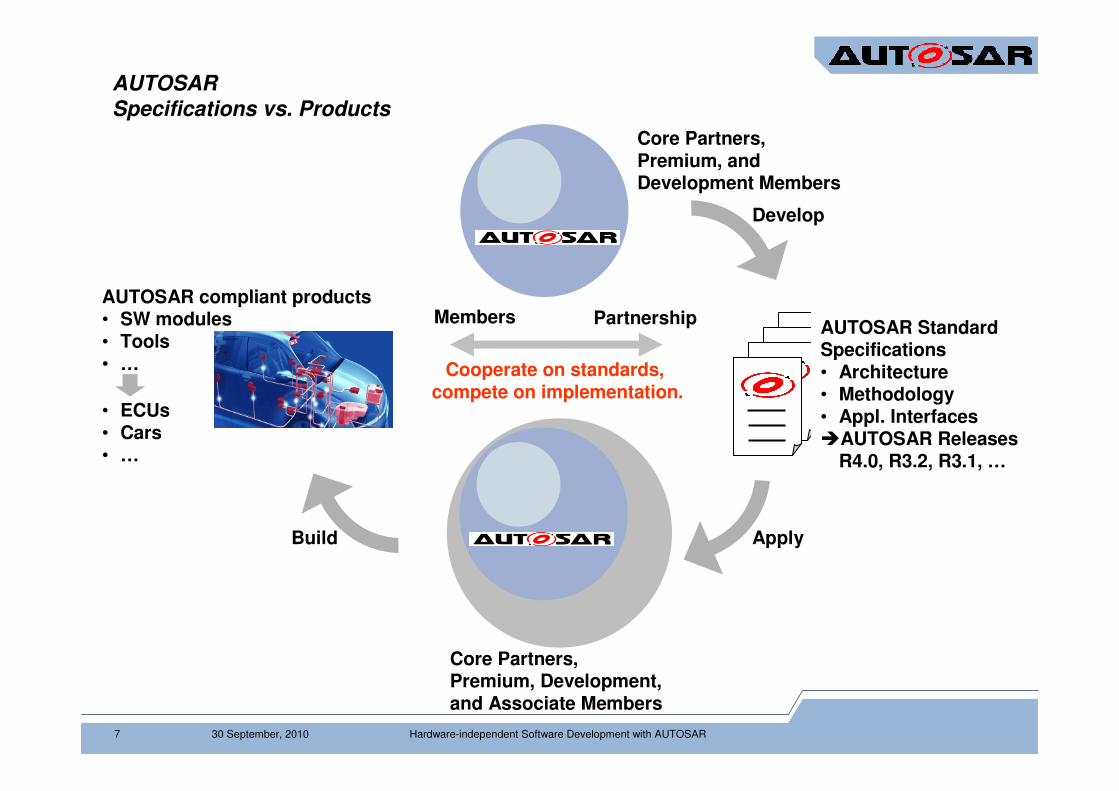
AUTOSAR
Specifications vs. Products
Core Partners, Premium, and Development Members
AUTOSAR StandardSpecifications• Architecture• Methodology• Appl. Interfaces�AUTOSAR Releases
R4.0, R3.2, R3.1, …
Develop
Core Partners, Premium, Development, and Associate Members
Apply
AUTOSAR compliant products • SW modules• Tools• …
Build
• ECUs• Cars• …
Members Partnership
Cooperate on standards, compete on implementation.
Hardware-independent Software Development with AUTOSAR30 September, 20108
Overview
� Introduction to AUTOSAR
� Overview on AUTOSAR Architecture
� AUTOSAR Development Methodology
Hardware-independent Software Development with AUTOSAR30 September, 201010
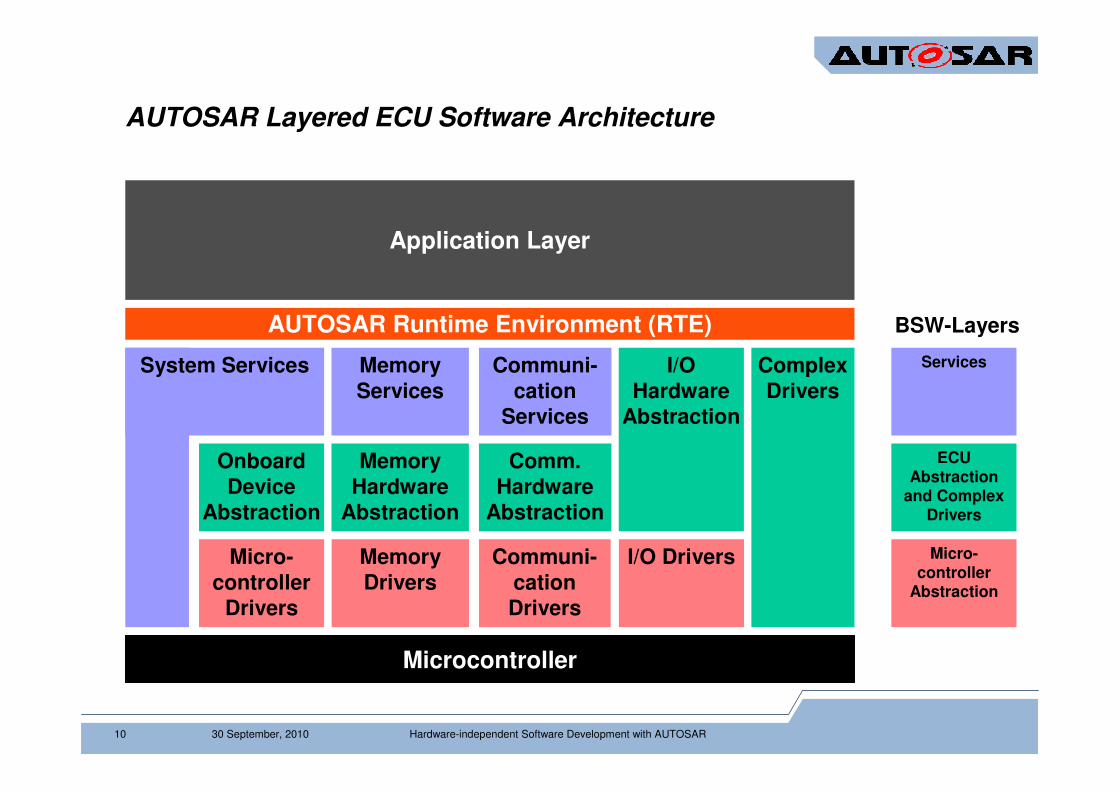
Microcontroller
AUTOSAR Runtime Environment (RTE)
Micro-
controller
Drivers
Memory
Drivers
I/O DriversCommuni-
cation
Drivers
Complex
Drivers
I/O
Hardware
Abstraction
Memory
Hardware
Abstraction
Onboard
Device
Abstraction
Comm.
Hardware
Abstraction
Memory
Services
System Services Communi-
cation
Services
Application Layer
AUTOSAR Layered ECU Software Architecture
Micro-controller
Abstraction
ECU Abstraction
and Complex Drivers
Services
BSW-Layers
Hardware-independent Software Development with AUTOSAR30 September, 201011
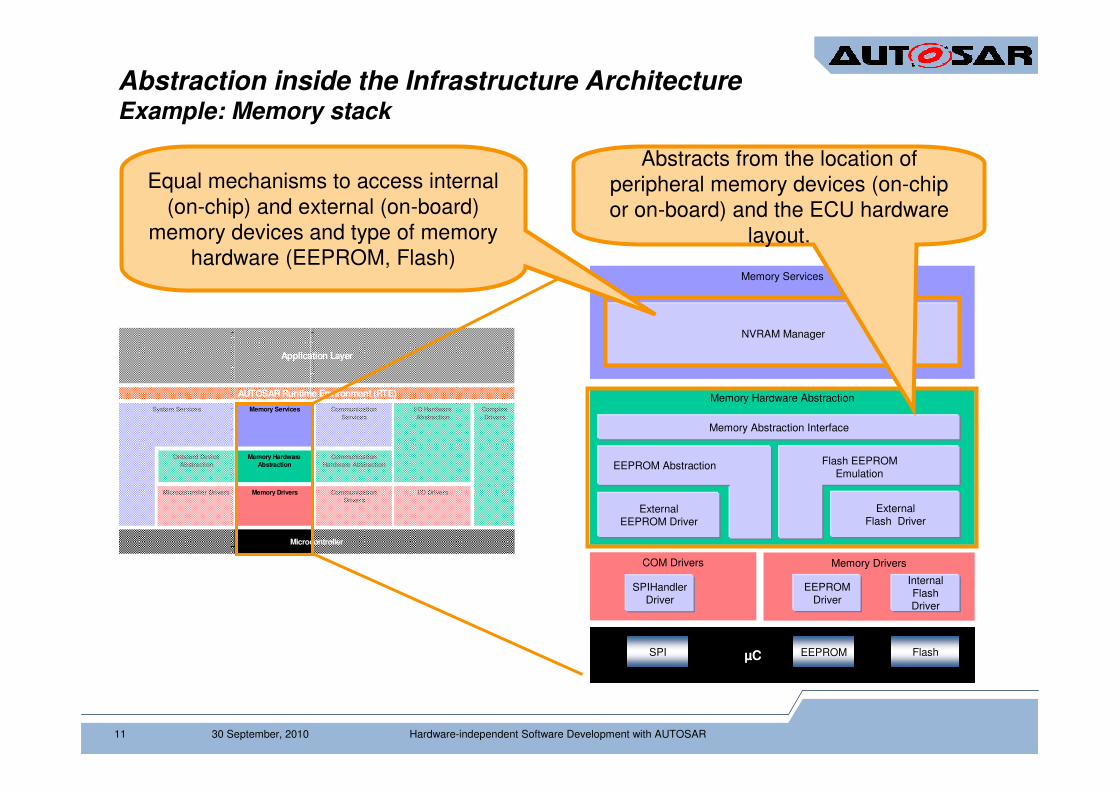
Memory Services
NVRAM Manager
Abstraction inside the Infrastructure ArchitectureExample: Memory stack
Complex
Drivers
Microcontroller
AUTOSAR Runtime Environment (RTE)
Microcontroller Drivers Memory Drivers I/O Drivers
I/O Hardware
Abstraction
Memory Hardware
Abstraction
Memory ServicesSystem Services
Onboard Device
Abstraction
Communication
Drivers
Communication
Hardware Abstraction
Communication
Services
Application Layer
COM Drivers
Memory Hardware Abstraction
µC
Memory Drivers
EEPROM Driver
SPIHandlerDriver
SPI EEPROM Flash
Internal Flash Driver
Memory Abstraction Interface
ExternalEEPROM Driver
EEPROM Abstraction
ExternalFlash Driver
Flash EEPROMEmulation
Equal mechanisms to access internal (on-chip) and external (on-board)
memory devices and type of memory hardware (EEPROM, Flash)
Abstracts from the location of peripheral memory devices (on-chip or on-board) and the ECU hardware
layout.
Hardware-independent Software Development with AUTOSAR30 September, 201012
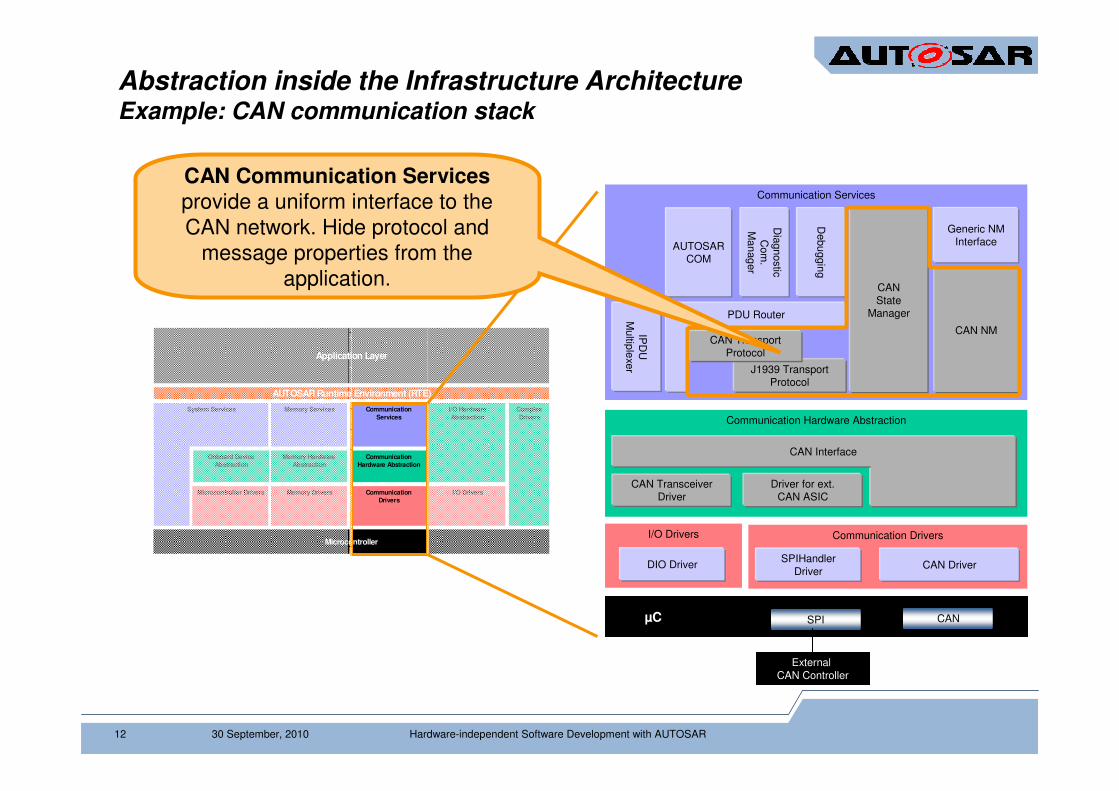
Abstraction inside the Infrastructure ArchitectureExample: CAN communication stack
Complex
Drivers
Microcontroller
AUTOSAR Runtime Environment (RTE)
Microcontroller Drivers Memory Drivers I/O Drivers
I/O Hardware
Abstraction
Memory Hardware
Abstraction
Memory ServicesSystem Services
Onboard Device
Abstraction
Communication
Drivers
Communication
Hardware Abstraction
Communication
Services
Application Layer
I/O Drivers
Communication Services
Communication Drivers
Communication Hardware Abstraction
CAN Driver
Driver for ext.CAN ASIC
SPIHandlerDriver
Diagnostic C
om.
Manager
AUTOSAR COM
CAN NM
µC SPI CAN
External CAN Controller
CAN Transceiver Driver
DIO Driver
Generic NM Interface
CANState
ManagerPDU Router
CAN Interface
Debugging
IPD
U
Multiplexer J1939 Transport
Protocol
CAN Transport Protocol
CAN Communication Services
provide a uniform interface to the CAN network. Hide protocol and
message properties from the application.
Hardware-independent Software Development with AUTOSAR30 September, 201013
Overview
� Introduction to AUTOSAR
� Overview on AUTOSAR Architecture
� AUTOSAR Development Methodology
Hardware-independent Software Development with AUTOSAR30 September, 201014
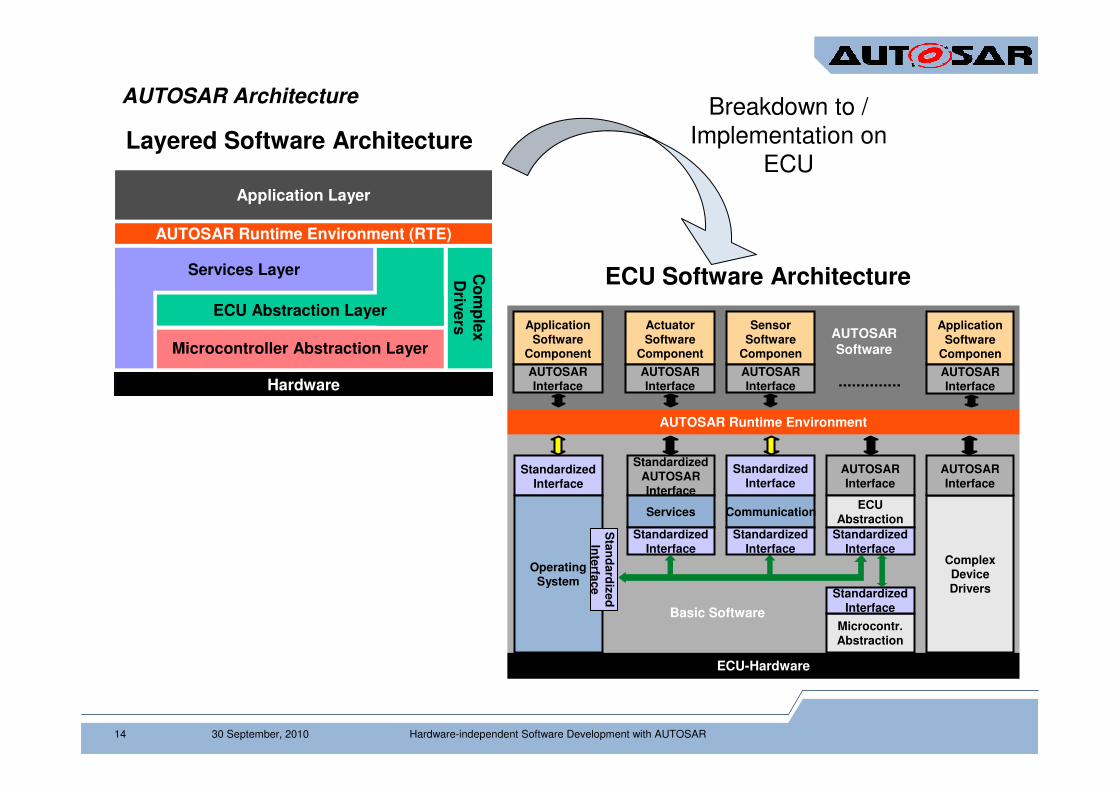
ECU Software Architecture
AUTOSAR Architecture
Co
mp
lex
Driv
ers
Hardware
Microcontroller Abstraction Layer
Services Layer
Application Layer
AUTOSAR Runtime Environment (RTE)
ECU Abstraction Layer
Layered Software Architecture
ECU-Hardware
AUTOSAR Runtime Environment
Application Software
Component
..............
AUTOSAR
Software
Basic Software
AUTOSAR Interface
Complex Device Drivers
Standardized Interface
Operating System
Actuator Software
Component
AUTOSAR Interface
Sensor Software
ComponentAUTOSAR
Interface
Application Software
Component
AUTOSAR Interface
Standardized Interface
Standardized AUTOSAR Interface
AUTOSAR Interface
AUTOSAR Interface
Services
Standardized Interface
Communication
Standardized Interface
ECUAbstraction
Standardized Interface
Microcontr. Abstraction
Standardized Interface
Sta
nd
ard
ize
d
Inte
rface
Breakdown to /Implementation on
ECU
Hardware-independent Software Development with AUTOSAR30 September, 201015
AU
TO
SA
R
SW
C
1
Virtual Functional Bus
...
AU
TO
SA
RS
WC
n
AU
TO
SA
RS
WC
3
AU
TO
SA
RS
WC
2
AU
TO
SA
RS
WC
1
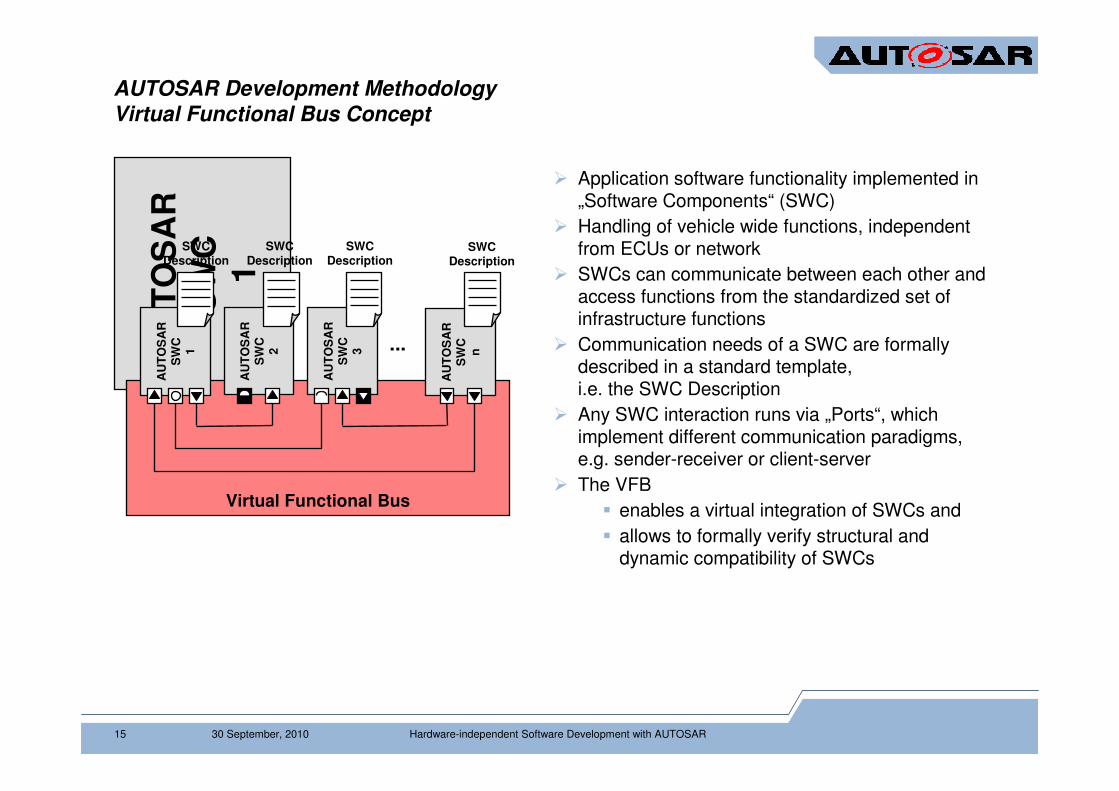
AUTOSAR Development Methodology
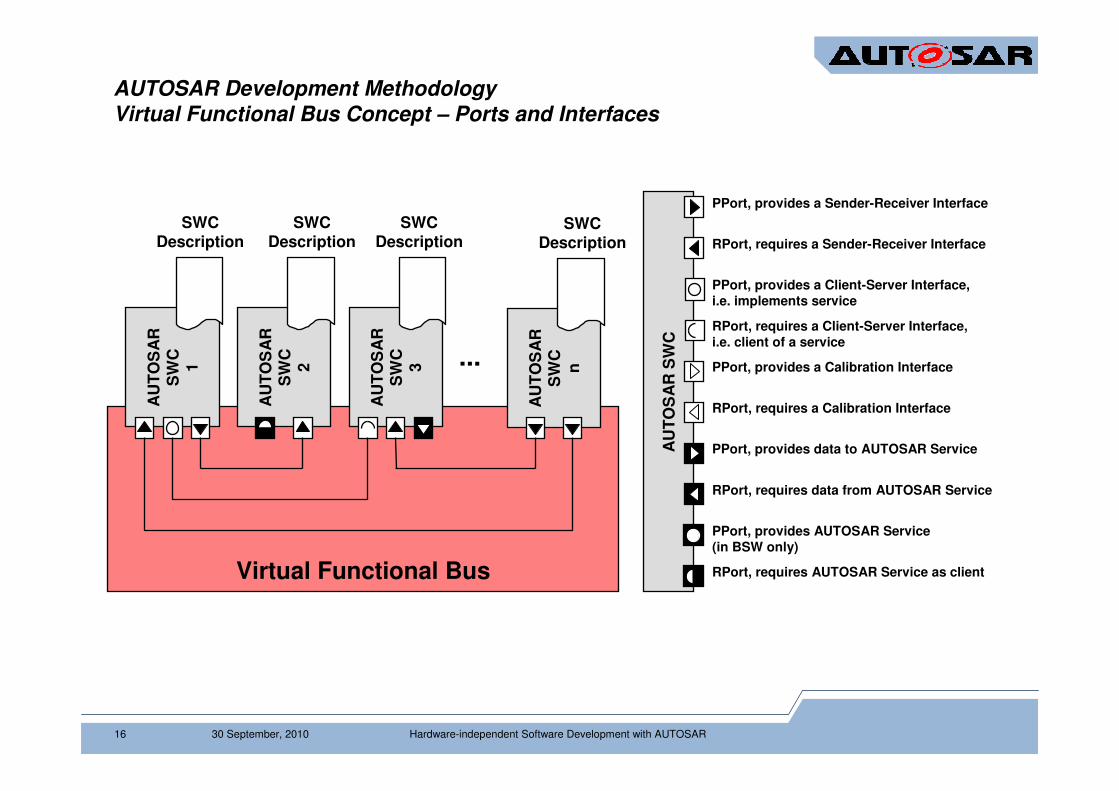
Virtual Functional Bus Concept
� Application software functionality implemented in „Software Components“ (SWC)
� Handling of vehicle wide functions, independent from ECUs or network
� SWCs can communicate between each other and access functions from the standardized set of infrastructure functions
� Communication needs of a SWC are formally described in a standard template, i.e. the SWC Description
� Any SWC interaction runs via „Ports“, which implement different communication paradigms, e.g. sender-receiver or client-server
� The VFB � enables a virtual integration of SWCs and� allows to formally verify structural and
dynamic compatibility of SWCs
SWCDescription
SWCDescription
SWCDescription
SWCDescription
Hardware-independent Software Development with AUTOSAR30 September, 201016
AU
TO
SA
R S
WC
Virtual Functional Bus
...
PPort, provides a Sender-Receiver Interface
RPort, requires a Sender-Receiver Interface
PPort, provides a Client-Server Interface,
i.e. implements service
RPort, requires a Client-Server Interface,
i.e. client of a service
PPort, provides data to AUTOSAR Service
PPort, provides AUTOSAR Service
(in BSW only)A
UT
OS
AR
SW
Cn
SWCDescription
PPort, provides a Calibration Interface
RPort, requires a Calibration Interface
RPort, requires AUTOSAR Service as client
RPort, requires data from AUTOSAR Service
AU
TO
SA
RS
WC
3
SWCDescription
AU
TO
SA
RS
WC
2
SWCDescription
AU
TO
SA
RS
WC
1
SWCDescription
AUTOSAR Development Methodology
Virtual Functional Bus Concept – Ports and Interfaces
Hardware-independent Software Development with AUTOSAR30 September, 201017
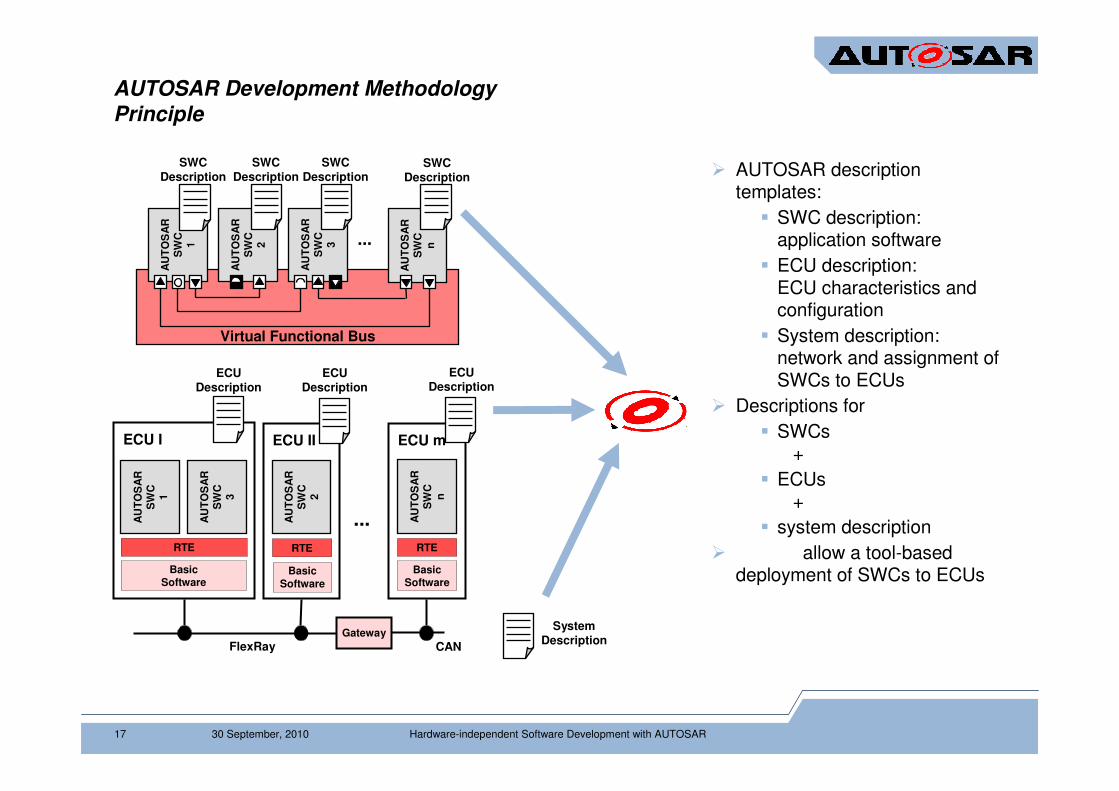
AUTOSAR Development Methodology
Principle
� AUTOSAR description templates:
� SWC description:application software
� ECU description:ECU characteristics and configuration
� System description: network and assignment of SWCs to ECUs
� Descriptions for� SWCs
+� ECUs
+� system description
� allow a tool-based deployment of SWCs to ECUs
Virtual Functional Bus
...
AU
TO
SA
RS
WC
n
AU
TO
SA
RS
WC
3
AU
TO
SA
RS
WC
2
AU
TO
SA
RS
WC
1
SWCDescription
SWCDescription
SWCDescription
SWCDescription
ECU m
...
ECU IIECU I
RTE
Basic Software
RTE
Basic
Software
RTE
Basic Software
AU
TO
SA
RS
WC
1
AU
TO
SA
RS
WC
3
AU
TO
SA
RS
WC
2
AU
TO
SA
RS
WC
n
ECUDescription
ECUDescription
ECUDescription
GatewaySystem
DescriptionCANFlexRay
Hardware-independent Software Development with AUTOSAR30 September, 201018
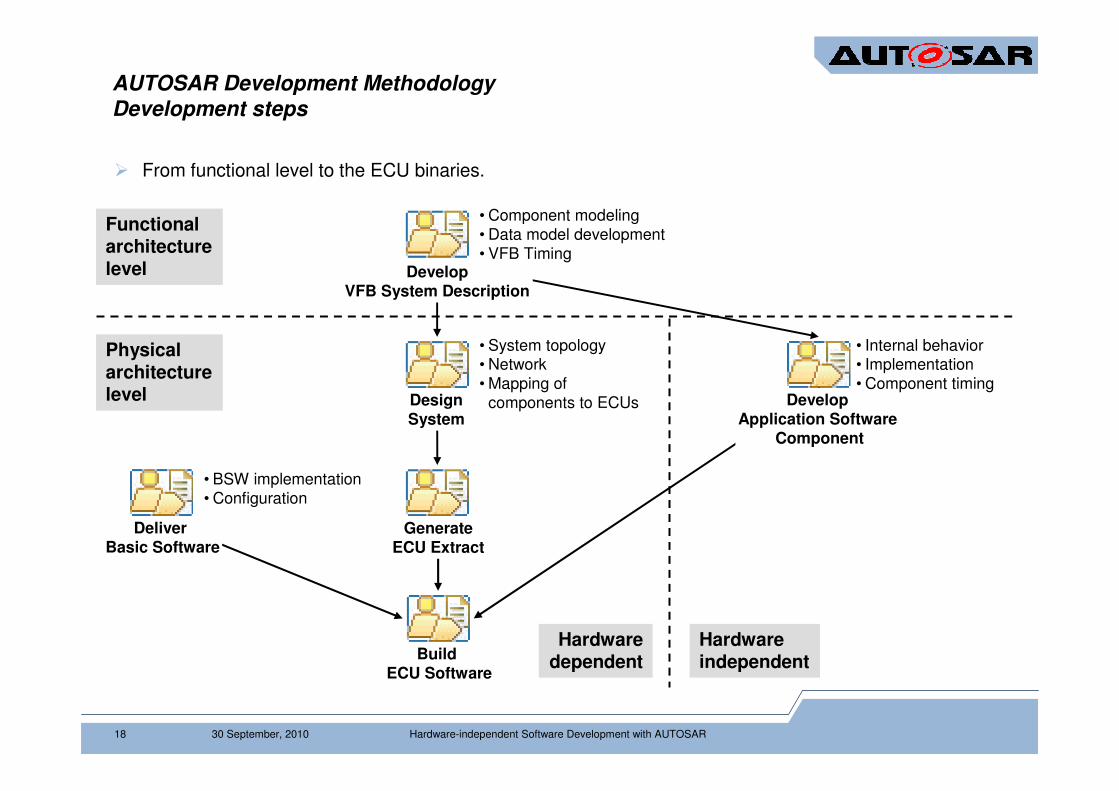
� From functional level to the ECU binaries.
AUTOSAR Development Methodology
Development steps
• Component modeling• Data model development• VFB Timing
• System topology• Network• Mapping of
components to ECUs
DevelopVFB System Description
DesignSystem
Build ECU Software
GenerateECU Extract
Develop Application Software
Component
Deliver Basic Software
• BSW implementation• Configuration
Functionalarchitecturelevel
Physicalarchitecturelevel
• Internal behavior• Implementation• Component timing
Hardwaredependent
Hardwareindependent
Hardware-independent Software Development with AUTOSAR30 September, 201019
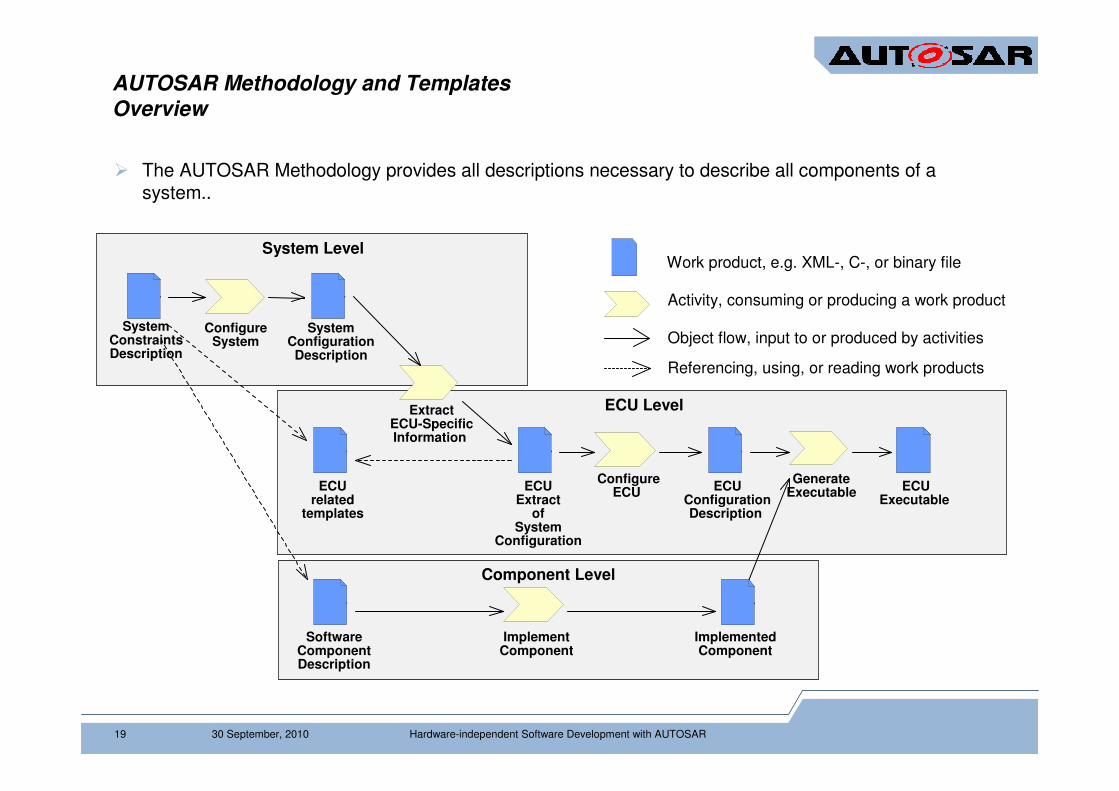
� The AUTOSAR Methodology provides all descriptions necessary to describe all components of a system..
AUTOSAR Methodology and Templates
Overview
ECU Level
Component Level
System Level
ConfigureSystem
.XML .XML
SystemConfigurationDescription
ExtractECU-SpecificInformation
.XML
ECUExtract
ofSystem
Configuration
ConfigureECU
.XML
ECUConfigurationDescription
GenerateExecutable
. exe
ECUExecutable
.XML
SoftwareComponentDescription
.XML
ECUrelated
templates
ImplementedComponent
ImplementComponent
Object flow, input to or produced by activities
Referencing, using, or reading work products
Work product, e.g. XML-, C-, or binary file
Activity, consuming or producing a work product
.XML
SystemConstraintsDescription
Hardware-independent Software Development with AUTOSAR30 September, 201020
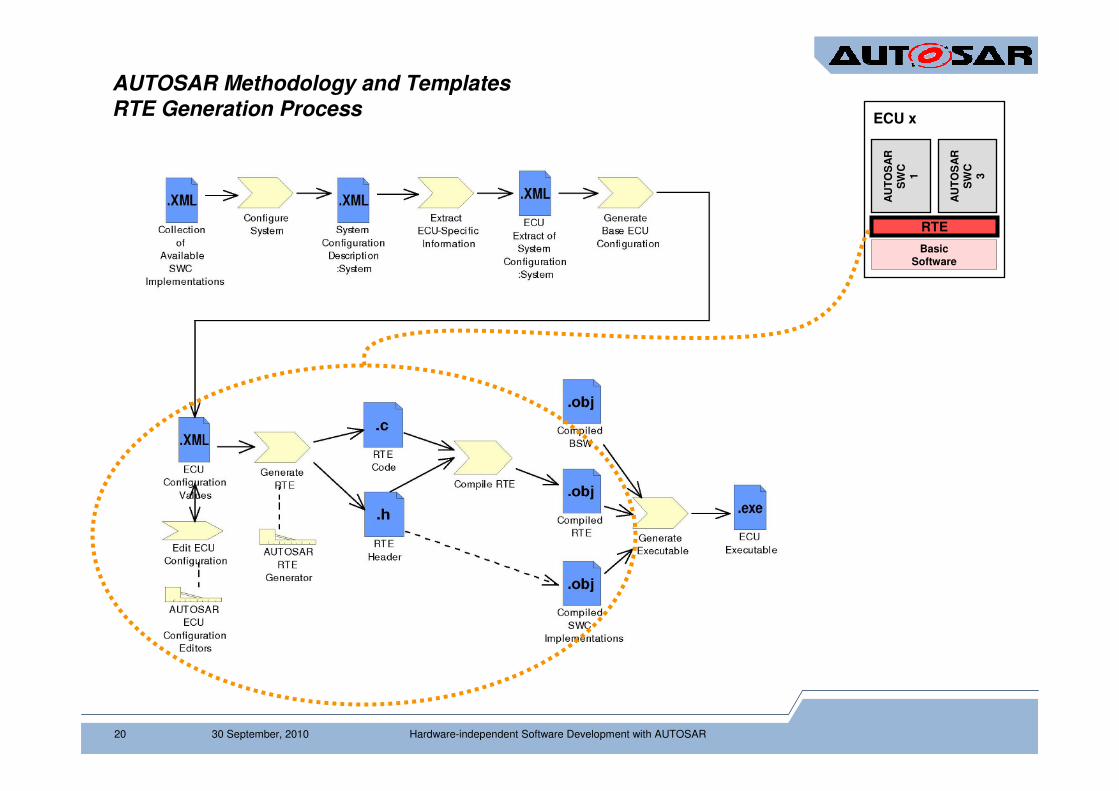
AUTOSAR Methodology and Templates
RTE Generation ProcessECU x
RTE
Basic Software
AU
TO
SA
R
SW
C1
AU
TO
SA
R
SW
C3
Hardware-independent Software Development with AUTOSAR30 September, 201021
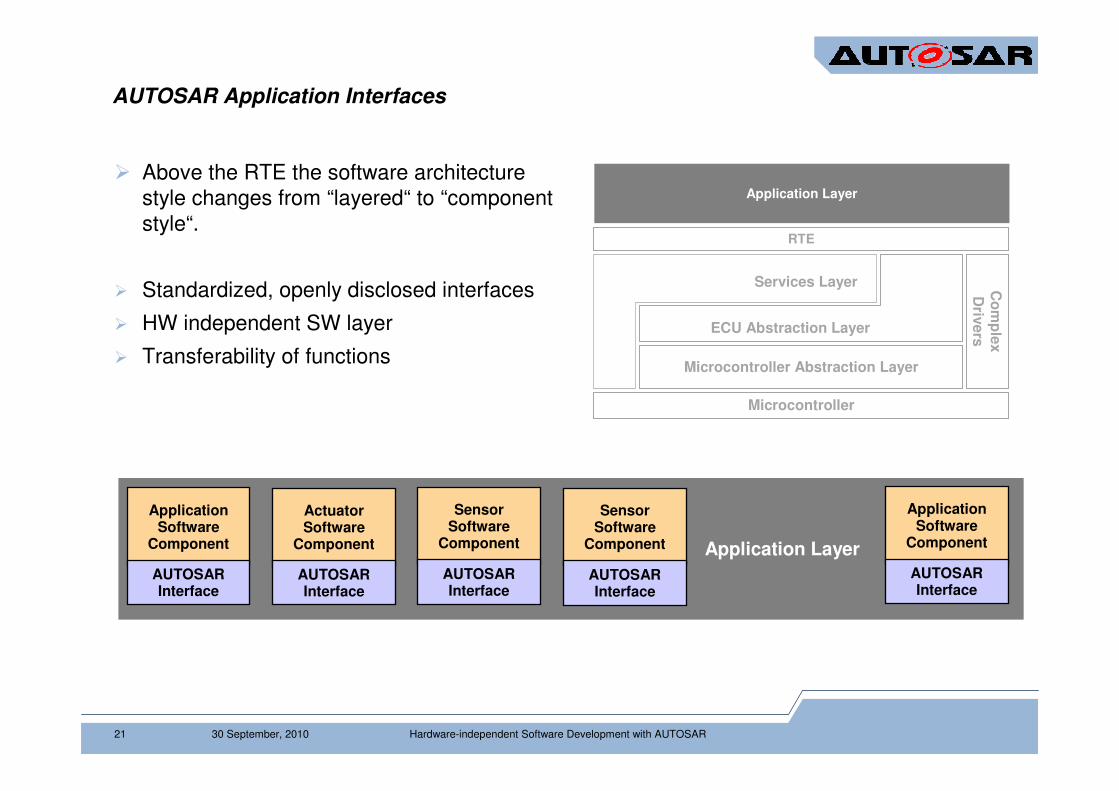
AUTOSAR Application Interfaces
� Above the RTE the software architecture style changes from “layered“ to “component style“.
� Standardized, openly disclosed interfaces
� HW independent SW layer
� Transferability of functions
Application Layer
RTE
Microcontroller
Microcontroller Abstraction Layer
ECU Abstraction Layer
Services Layer
ECU Abstraction Layer
Co
mp
lex
Driv
ers
Application Layer
ActuatorSoftware
Component
SensorSoftware
Component
ApplicationSoftware
Component
AUTOSARInterface
AUTOSARInterface
AUTOSARInterface
ApplicationSoftware
Component
AUTOSARInterface
SensorSoftware
Component
AUTOSARInterface
Hardware-independent Software Development with AUTOSAR30 September, 201022
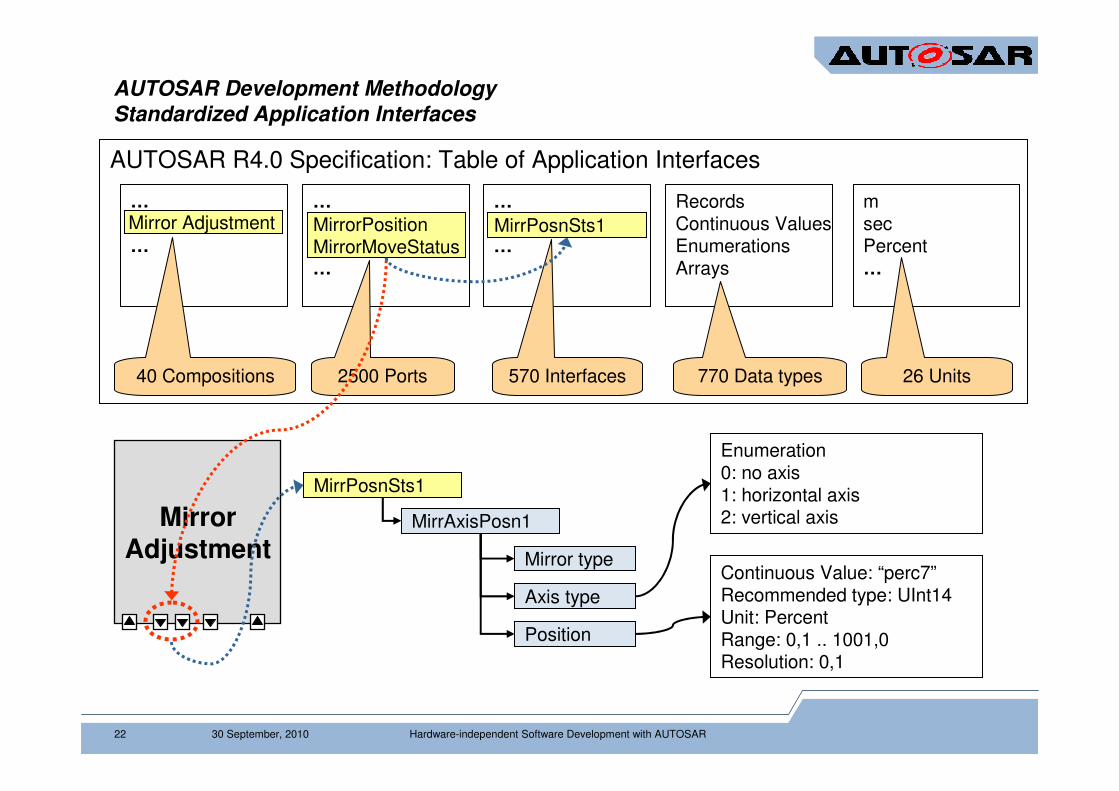
AUTOSAR R4.0 Specification: Table of Application Interfaces
AUTOSAR Development Methodology
Standardized Application Interfaces
…Mirror Adjustment…
40 Compositions
…MirrorPositionMirrorMoveStatus…
2500 Ports
…MirrPosnSts1…
570 Interfaces
RecordsContinuous Values EnumerationsArrays
770 Data types
msecPercent…
26 Units
Mirror Adjustment
Mirror Adjustment
MirrPosnSts1
MirrAxisPosn1
Mirror type
Axis type
Position
Continuous Value: “perc7”Recommended type: UInt14 Unit: PercentRange: 0,1 .. 1001,0Resolution: 0,1
Enumeration0: no axis1: horizontal axis2: vertical axis
MirrorPositionMirrorMoveStatus
MirrPosnSts1
Hardware-independent Software Development with AUTOSAR30 September, 201023
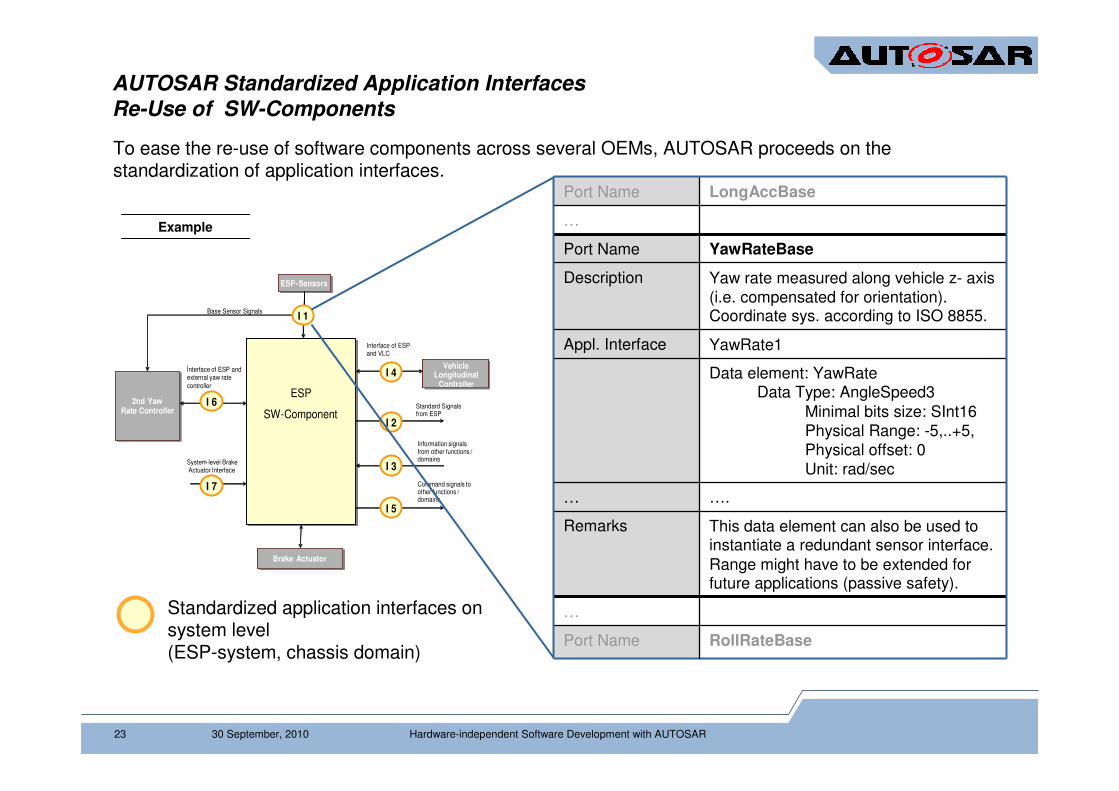
AUTOSAR Standardized Application Interfaces
Re-Use of SW-Components
ESP
SW-Component
ESP
SW-Component2nd Yaw
Rate Controller
2nd YawRate Controller
Brake ActuatorBrake Actuator
Information signalsfrom other functions / domains
ESP-SensorsESP-Sensors
Ínterface of ESP and external yaw rate controller
Standard Signals from ESP
VehicleLongitudinal
Controller
VehicleLongitudinal
Controller
Command signals to other functions / domains
Interface of ESP and VLC
Base Sensor Signals
System-level BrakeActuator Interface
I 1
I 2
I 6
I 7
I 3
I 5
I 4
ESP
SW-Component
ESP
SW-Component2nd Yaw
Rate Controller
2nd YawRate Controller
Brake ActuatorBrake Actuator
Information signalsfrom other functions / domains
ESP-SensorsESP-Sensors
Ínterface of ESP and external yaw rate controller
Standard Signals from ESP
VehicleLongitudinal
Controller
VehicleLongitudinal
Controller
Command signals to other functions / domains
Interface of ESP and VLC
Base Sensor Signals
System-level BrakeActuator Interface
I 1
I 2
I 6
I 7
I 3
I 5
I 4
Standardized application interfaces on system level (ESP-system, chassis domain)
Port Name LongAccBase
…
Port Name YawRateBase
Description Yaw rate measured along vehicle z- axis (i.e. compensated for orientation). Coordinate sys. according to ISO 8855.
Appl. Interface YawRate1
Data element: YawRateData Type: AngleSpeed3
Minimal bits size: SInt16Physical Range: -5,..+5,Physical offset: 0Unit: rad/sec
… ….
Remarks This data element can also be used to instantiate a redundant sensor interface.Range might have to be extended for future applications (passive safety).
…
Port Name RollRateBase
Example
To ease the re-use of software components across several OEMs, AUTOSAR proceeds on the standardization of application interfaces.

Hardware-independent Software Development with AUTOSAR30 September, 201024
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
DIO
check_switch ()
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
get_keyposition()
AUTOSAR Interface
Headlight
set_current (…)
CAN Driver
switch_event(event)
switch_event
(event)
request_light
(type, mode)
request_light(type, mode)
set_light(type, mode)
set_light(type, mode)
PWM
Sta
nd
ard
ize
dIn
terfa
ce
set_dboard(type, mode)
Software Architecture – AUTOSAR Defined Interfaces
Use Case ‘Front Light Management’ mapped to AUTOSAR architecture
Integrator Supplier B OEM Supplier AS
ilic
on
ve
nd
or
AIn
teg
rato
r
Hardware-independent Software Development with AUTOSAR30 September, 201025
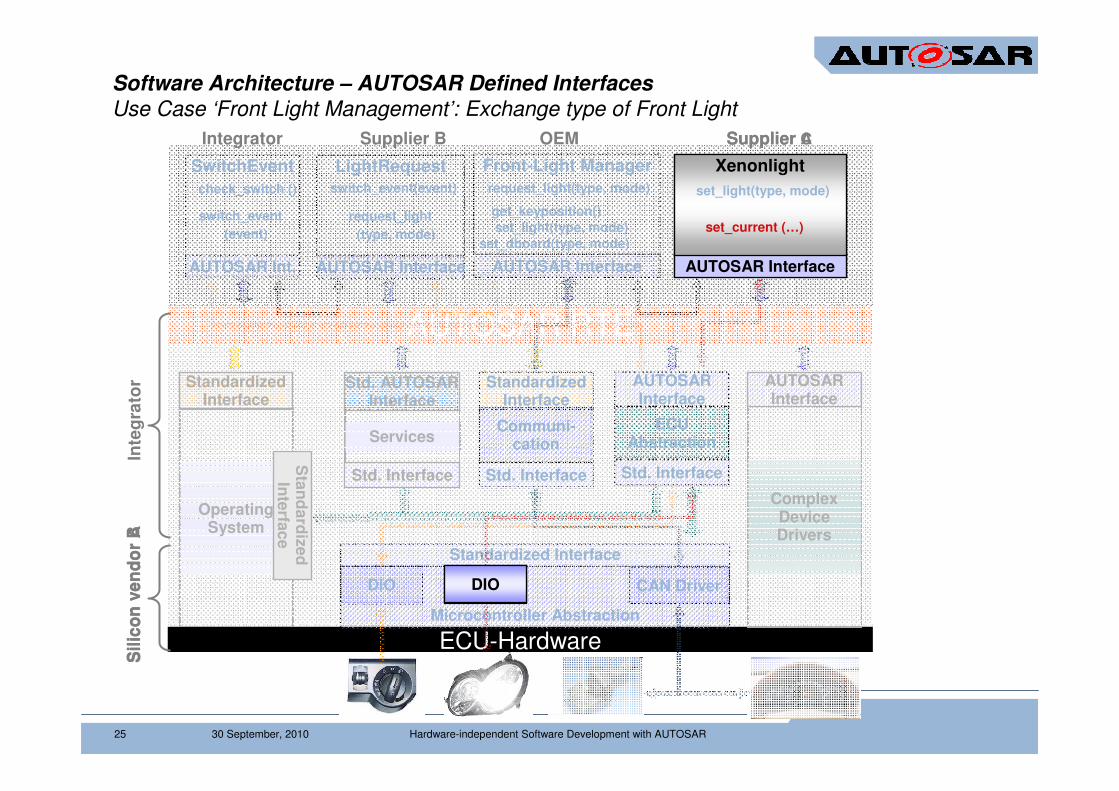
ECU-Hardware
AUTOSAR RTE
AUTOSAR Int.
SwitchEvent
Standardized Interface
Microcontroller Abstraction
Std. AUTOSARInterface
Services
Std. Interface
ECUAbstraction
AUTOSARInterface
Std. Interface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communi-cation
Std. Interface
StandardizedInterface
OperatingSystem
DIO
check_switch ()
AUTOSAR Interface
LightRequest
AUTOSAR Interface
Front-Light Manager
get_keyposition()
AUTOSAR Interface
Headlight
set_current (…)
CAN Driver
switch_event(event)
switch_event
(event)
request_light
(type, mode)
request_light(type, mode)
set_light(type, mode)
set_light(type, mode)
PWM
Sta
nd
ard
ize
dIn
terfa
ce
set_dboard(type, mode)
Software Architecture – AUTOSAR Defined Interfaces
Use Case ‘Front Light Management’: Exchange type of Front Light
DIO
AUTOSAR Interface
Xenonlight
set_light(type, mode)
set_current (…)
Integrator Supplier B OEM Supplier AS
ilic
on
ve
nd
or
AIn
teg
rato
rS
ilic
on
ve
nd
or
BSupplier C
Hardware-independent Software Development with AUTOSAR30 September, 201026
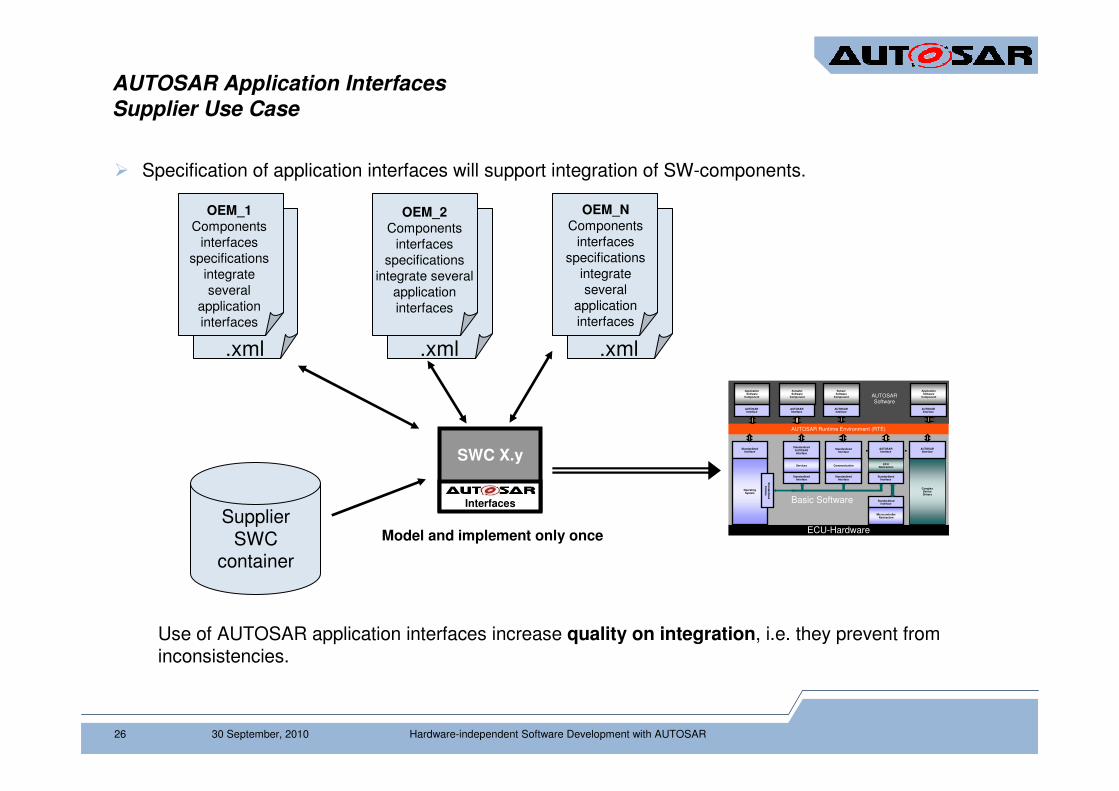
� Specification of application interfaces will support integration of SW-components.
ECU-Hardware
AUTOSAR Runtime Environment (RTE)
ActuatorSoftware
Component
AUTOSARInterface
ApplicationSoftware
Component
SensorSoftware
Component
ApplicationSoftware
Component
..............
AUTOSARSoftware
Basic Software StandardizedInterface
AUTOSARInterface
AUTOSARInterface
AUTOSARInterface
MicrocontrollerAbstraction
StandardizedAUTOSARInterface
Services
StandardizedInterface
ECUAbstraction
AUTOSARInterface
StandardizedInterface
ComplexDeviceDrivers
AUTOSARInterface
StandardizedInterface
Communication
StandardizedInterface
StandardizedInterface
OperatingSystem
Sta
nd
ard
ized
Inte
face
AUTOSAR Application Interfaces
Supplier Use Case
Model and implement only once
Use of AUTOSAR application interfaces increase quality on integration, i.e. they prevent from inconsistencies.
SWC X.y
Interfaces
SupplierSWC
container
OEM_1
Components interfaces
specifications integrate several
application interfaces
.xml .xml
OEM_2
Components interfaces
specifications integrate several
application interfaces
.xml
OEM_N
Components interfaces
specifications integrate several
application interfaces
Hardware-independent Software Development with AUTOSAR30 September, 201027
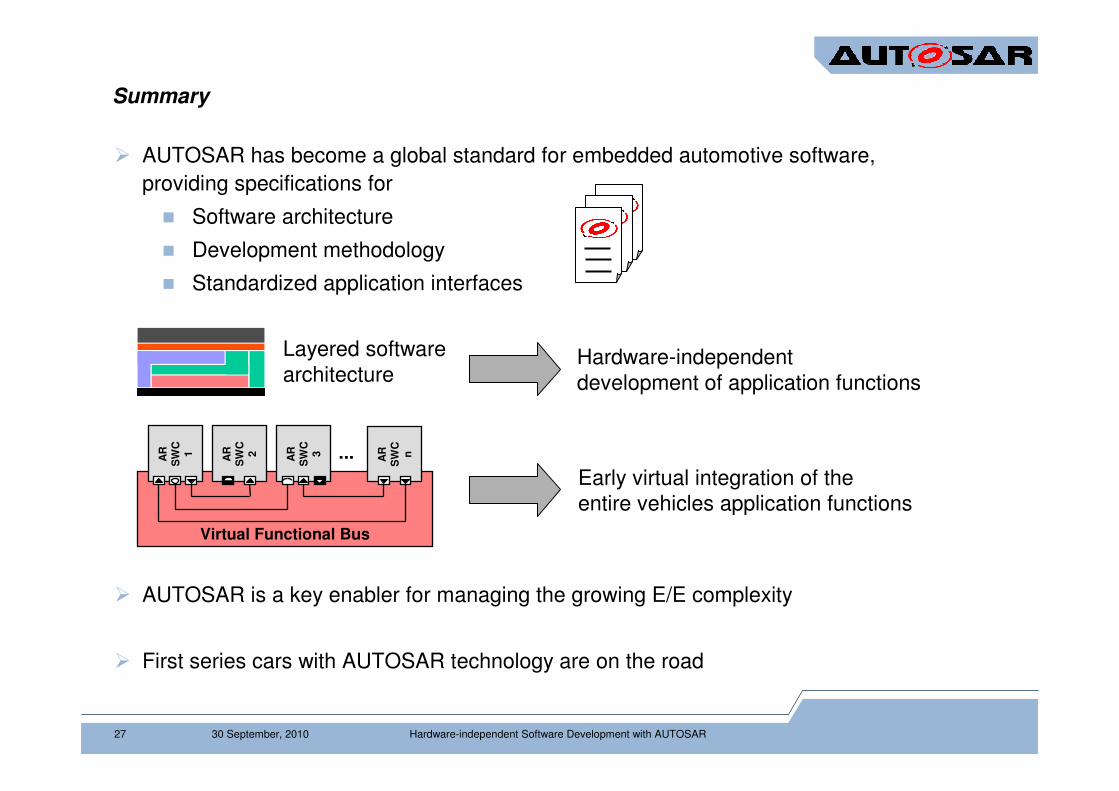
� AUTOSAR has become a global standard for embedded automotive software, providing specifications for
� Software architecture
� Development methodology
� Standardized application interfaces
� AUTOSAR is a key enabler for managing the growing E/E complexity
� First series cars with AUTOSAR technology are on the road
Summary
... AR
SW
CnAR
SW
C3AR
SW
C2AR
SW
C1
Virtual Functional Bus
Early virtual integration of the entire vehicles application functions
Hardware-independent development of application functions
Layered softwarearchitecture
Hardware-independent Software Development with AUTOSAR30 September, 201028
Thank you for your attention!
[email protected] a member and get exploitation rights for the AUTOSAR standard.
Published ReleasesFor information only, see disclaimer.
http://www.autosar.org