groups, representations, and particle...
TRANSCRIPT
Groups, Representations, and Particle Physics
Cayle Castor
Review of Groups
● Consider a set of elements G equipped with a binary operation ( , ). G is a group under this operation if:
0.) G is closed under ( , )1.) ( , ) is associative2.) Identity3.) Inverses

Quickly... examples of Groups
● ℤ under ( + )
● ℤn under ( + )mod(n)
● SU(N) under matrix multiplication
● GL(2,F) under matrix multiplication
-Invertible <--> non-zero determinant
-If determinant = 1 we have SL(2,F) (a subgroup).
In group theory, “multiplication” really means binary operation. It's essentially a mapping.
Consider the group Z3, the integers under addition modulo 3.
(0,1) ---> 1 (1,0) ---> 1 (0,2) ---> 2 (2,0) ---> 2 (1,2) ---> 0 (2,1) ---> 0
There's an easier way to display this information...
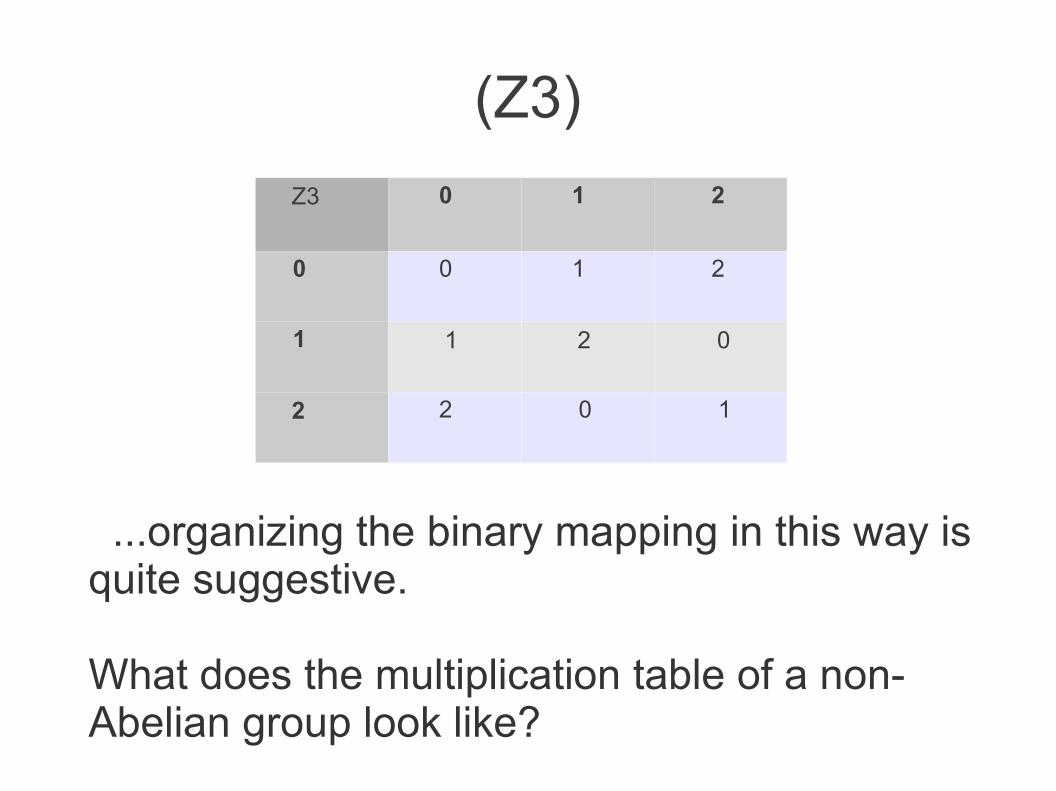
(Z3)
Z3 0 1 2
0 0 1 2
1 1 2 0
2 2 0 1
...organizing the binary mapping in this way is quite suggestive.
What does the multiplication table of a non-Abelian group look like?
Homomorphisms
● A homomorphism Φ: G → G' is a mapping from one group, G, to another G' that preserves the group operation.
Φ(a.b) = Φ(a).Φ(b)
● There is a subtle point about the binary operation on the right hand side of this condition.
Classic examples
● SU(2) and SO(3)
● Φ: G H → G via Φ(g,h) → g. ⊕
-What is the kernel of this operation?
● Is Φ: Z → 2Z via Φ(z)→ 2z a homomorphism?

Representation Theory
● A representation of a group G is a mapping to a set of linear operators on a vector space ...
D: G –> GL(V)
… such that …
1.) D(e) = I (identity)
2.) D(g1g2) = D(g1)D(g2) g1,g2 ∀ ∈ G
This is just a group homomorphism.
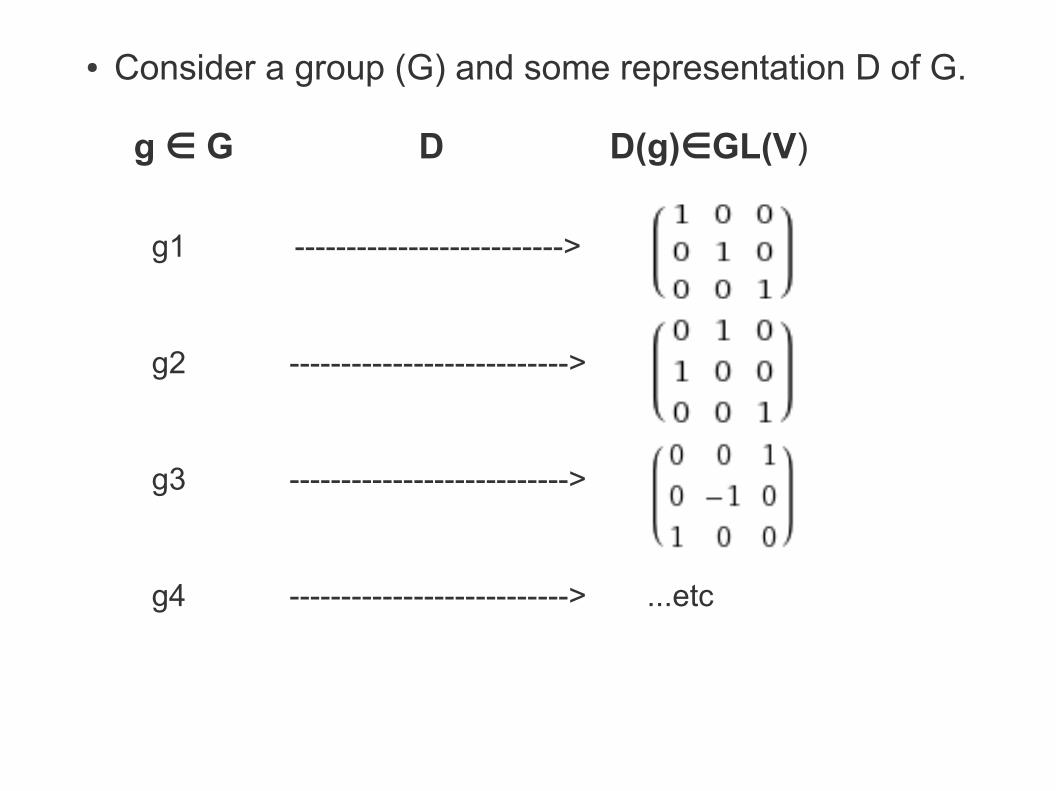
● Consider a group (G) and some representation D of G.
g G ∈ D D(g) GL(V∈ )
g1 -------------------------->
g2 --------------------------->
g3 --------------------------->
g4 ---------------------------> ...etc

Regular Representation
● Take the group elements to form an orthonormal basis for some vector space...
V = { | g > | g G }∈
● The representation, D, is defined as the mapping to matrices which give the proper multiplication rules on the states.
● (Permutation Matrices for finite discrete groups)
Dimension(V) = |G|

Equivalent Representations
● We can always construct a new representation from an old one, by performing a similarity transformation to each element...
SD(g)(S^-1)
● This clearly preserves the multiplication rules of D(g) D, (as well as ∈g G)∈
● D and D' are said to be equivalent representations.
Faithful Representations
● Representations (homomorphisms to matrices) that are to one-to-one.
● Notice that the kernel of a homomorphism is always a normal subgroup of the first group (the domain of the mapping).
● Unfaithful representations “blur” structure by “dividing” out a normal subgroup. This “lumps” elements of G together by an equivalence class induced by the mapping.
● G/ker(D) = {g ker(D) | g G} is isomorphic to the image of G under D, ∈D(G).
ex.)
Z4={0,1,2,3}
Normally, <2>= {0,2,4,6,...}, however a coset must be a subgroup. For the operation of addition modulo four, <2>={0,2}.
Z4/<2> = {z + <2> | z Z∈ 4} = {z+ {0,2} | z Z∈ 4}
...where z+<2> is a left coset multiplication on <2>.
0+<2>= 0+<2> 1+<2>=1+<2>2+<2>=0+<2>3+<2>= (1+2) + <2> = 1 + (2+<2>) = 1+<2>
… we are effectively absorbing “factors” of two into the coset <2>. The only remaining elements are 0+<2> and 1+<2>.
● Therefore Z4/<2> is isomorphic to Z2={0,1}.
● Φ:Z4 → Z2 given by Φ(z)= z + <2> is a homomorphism.
● {0,2} are in an equivalence class, and so are {1,3}. If you “blur your eyes” elements of these sets look equivalent.
Reducible Representations
● A representation is reducible if it has an invariant subspace V' . In other words,
P D(g) P = D(g) P g G∀ ∈
Where P is a projection operator onto the subspace.
● Can we make this intuitive?
● It has something to do with our typographical method containing redundant information.
Example:Parity in Quantum Mechanics
● P^2 = e●
●
●
●
●
● Let's try the regular representation...
Parity e p
e e p
p p e
Result
● Thus there are two irreducible representations.
1.) D(e)=1 D(p)= -1
2.) D(e)=1 D(p)=1 (Trivial Representation)
If D(p) commutes with the Hamiltonian we can simultaneously diagonalize and assign energy eigenstates definite values of p.
Energy Eigenstates that transform as D(p)|E> = 1|E> are said to transform as the trivial representation.
Energy eigenstates that transform as D(p)|E> = -1|E> transform non-trivially.
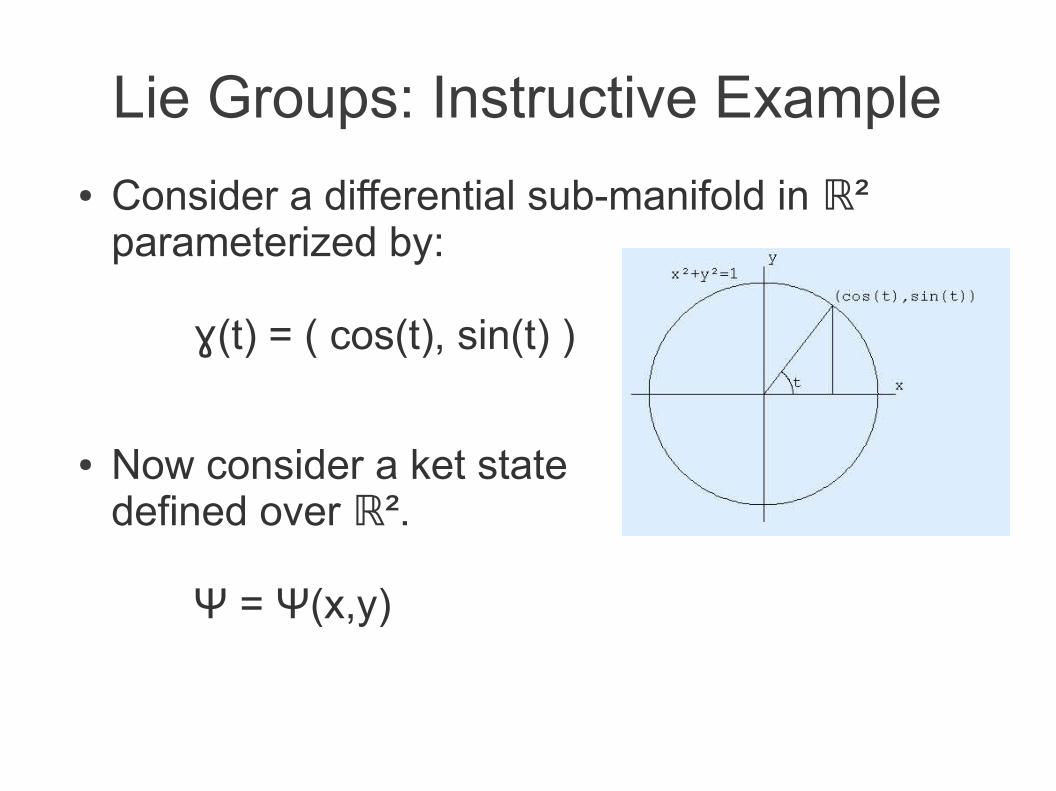
Lie Groups: Instructive Example
● Consider a differential sub-manifold in ℝ² parameterized by:
(t) = ( cos(t), sin(t) )ɣ
● Now consider a ket statedefined over ².ℝ
Ψ = Ψ(x,y)
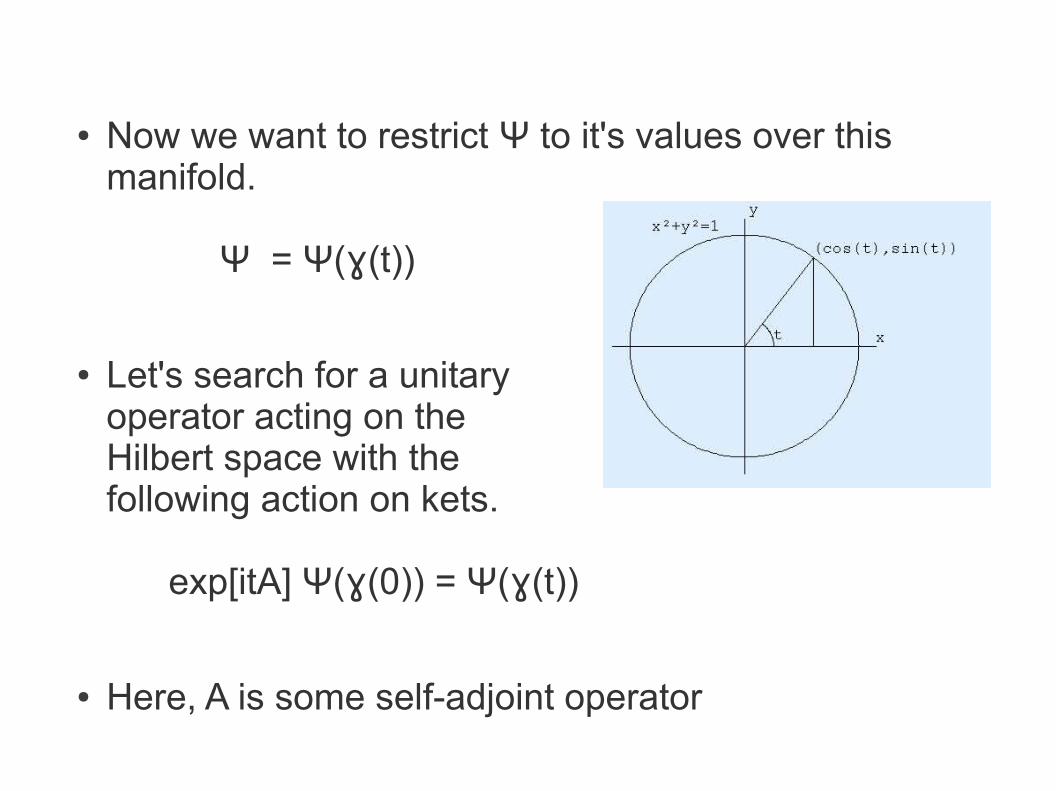
● Now we want to restrict Ψ to it's values over this manifold.
Ψ = Ψ( (t)) ɣ
● Let's search for a unitaryoperator acting on the Hilbert space with the following action on kets.
exp[itA] Ψ( (0)) = Ψ( (t)) ɣ ɣ
● Here, A is some self-adjoint operator
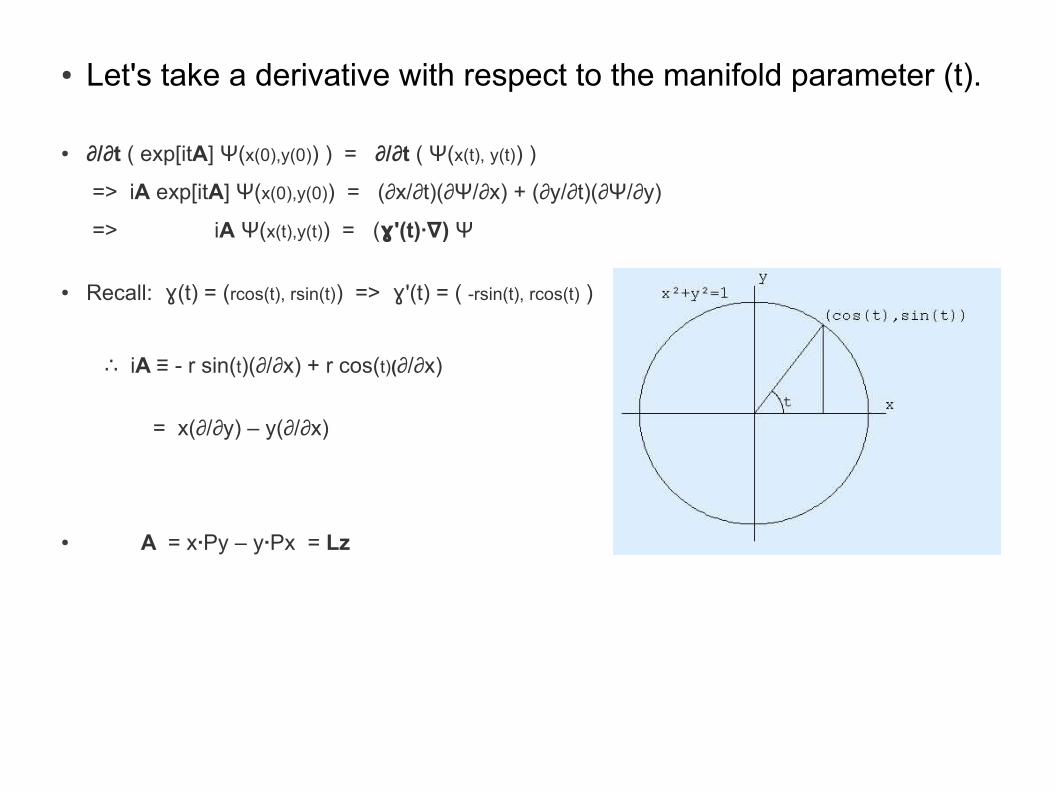
● Let's take a derivative with respect to the manifold parameter (t).
● ∂/∂t ( exp[itA] Ψ(x(0),y(0)) ) = ∂/∂t ( Ψ(x(t), y(t)) )
=> iA exp[itA] Ψ(x(0),y(0)) = (∂x/∂t)(∂Ψ/∂x) + (∂y/∂t)(∂Ψ/∂y)
=> iA Ψ(x(t),y(t)) = ( '(t)· ) ɣ ∇ Ψ
● Recall: (t) = (ɣ rcos(t), rsin(t)) => '(t) = ( ɣ -rsin(t), rcos(t) )
i∴ A ≡ - r sin(t)(∂/∂x) + r cos(t)(∂/∂x)
= x(∂/∂y) – y(∂/∂x)
● A = x·Py – y·Px = Lz
So we see the form of the A operator is fixed by the topology and parameterization of the sub-manifold of the domain of Ψ.
The above example is rather simple, due to Stone's Theorem.
“...one-to-one correspondence between self-adjoint operators on a Hilbert space H and one-parameter families of unitary operators”
ex.) H ↔ {exp(iHt) | t∈ℝ}

● Notice that the set {exp(iHt) | t∈ℝ} forms an Abelian group under multiplication...
-Identity ✓-Inverse ✓- Associativity ✓
-Closure: ✓ exp(iHs)*exp(iHt)=exp(iHt+iHs)=exp(iH(t+s)) where (t+s)∈ . ℝ
● The closure property would fail for some t and s, if ℝ itself were not closed under addition.
● Things are not so simple when the dimension of our manifold is greater than 1. There will be a self adjoint operator associated with each parameter, and they may not commute.
Lie Groups, Lie Algebras
● Abstract: A Lie group is a group which is also a finite dimensional real smooth manifold.
● Practical:
Suppose we find a representation, D, of some Lie group G. This means we have...
{ D(g(t)) GL(n,∈ ℂ )| D is a homomorphism from G and t parameterizes the group elements}
● Abstract:A Lie algebra, A, is a vector space over some field F equipped with a binary operation called a Lie bracket...
[ , ]: AxA → A
… which is Bilinear and Alternating, and satisfies the Jacobi identity. (a.k.a Commutator)
● Practical:A Lie Algebra, A, associated with some Lie group, G, is the set of matrices...
{X GL(n, ∈ ) | ℂ exp(t X) G}∈
(Definitions differ for the Lie Algebra. Some sources refer to the generators, and some sources refer to the vector space V spanned by the generators For our purposes, take X as some linear combination of generators, where the coefficients are elements of a group which can be indexed some manifold parameter.)
● Let's refer back to and expand upon the circle example (to a 3 sphere). Recall that t is the manifold parameter.
● Lie group:
{exp(it abAb) | Ab {L∈ x, Ly, Lz} and ab F}∈
● Lie Algebra:
{axLx + ayLy + azLz | equipped with [ , ] }
● The vector space is three dimensional, spanned by the angular momentum operators.
● {Lx, Ly, Lz} are called the generators of the Lie Algebra.
● Rigorously speaking, the generators are determined by looking for Lie group elements which differ infinitesimally from the identity.
● This Lie group is called SO(3) and the Lie algebra is called so(3).
A few things...
1.) Lie Group is Abelian <=> [Xi,Xj] = 0 X∀ i,j∈A
2.) Lie Group is non-Abelian => [Xi,Xj] = ∑Cijk Xk
-Cijk are called structure constants.
Here, we have assumed a unitary representation of the symmetry group:
U(t,ai) = exp(t ai Xi)
● If the Hamiltonian of a physical system is invariant under some symmetry group G, then all members of a multiplet belonging to an irreducible unitary representation have the same energy (spectrum).
A multiplet is the set of basis vectors spanning the vector space V upon which the representation matrices act.
H Ψn= EnΨn
UaHΨn = (UaHUˉa) UaΨn = EnUaΨn
● H′= UaHUˉa Ψ'n = UaΨn
● Our equation becomes...
H'Ψ'n = EnΨ'n
● However, if U is a symmetry of our physical system, then...
H'=H (notice that this implies [H,U]=0 as we expect)
● Finally, we arrive at....
HΨ'n = EnΨ'n (The transformed states share the same energy)
Gauge Theory?
● Gauge Theory:
“In physics, a gauge theory is a type of field theory in which the Lagrangian is invariant under a continuous group of local transformations.”
~Wikipedia
● Non-Abelian Gauge Theory:
Just introduce non-zero structure constants!
● Cayle, this slide is to remind you to consult your notebook and talk about non-abelian lie groups.
The Standard Model
SU(3) × SU(2) × U(1)