graduaÇÃo de tecnologia em mecatrÔnica … · de pacientes traumatizados, proporcionando ao...
TRANSCRIPT

____________________________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Júlio Julinho Marcondes de Moura”
GRADUAÇÃO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
Andre Gifalli Osvaldo Rodrigo Brás Turte
Órtese dinâmica automatizada para auxilio no tratamento de pacientes com fratura de cotovelo
GARÇA
2016

____________________________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Júlio Julinho Marcondes de Moura”
GRADUAÇÃO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
André Gifalli Osvaldo Rodrigo Brás Turte
Órtese dinâmica automatizada para auxilio no tratamento de pacientes com fratura de cotovelo
Artigo Científico apresentado à Faculdade de Tecnologia de Garça – FATEC, como requisito para conclusão do Curso de Tecnologia em Mecatrônica Industrial, examinado pela seguinte comissão de professores:
Data da avaliação:___/___/___ _____________________________________
Prof. Ms. Ildeberto de Genova Bugatti FATEC-Garça _________________________________________ Prof. FATEC-Garça _________________________________________ Prof. FATEC-Garça
GARÇA
2016

1
Órtese dinâmica automatizada para auxilio no tratamento de pacientes com fratura de cotovelo
Andre Gifalli1 Osvaldo Rodrigo Brás Turte2 Ildeberto de Genova Bugatti3 [email protected] [email protected] bugatti.fatec@ gmail.com
Resumo
O crescimento constante da tecnologia influencia o desenvolvimento de equipamentos
eletrônicos para utilização em diversas áreas, dentre elas, a área da saúde voltada ao bem-
estar do ser humano e qualidade de vida. Através da mecatrônica, que abrange três
tecnologias em conjunto; Mecânica, Eletrônica e a Computação, juntamente com os
conhecimentos adquiridos no curso, decidiu-se pesquisar e desenvolver uma órtese
automatizada que auxilie na fisioterapia e reabilitação de pacientes com fraturas em membros
superiores, possibilitando a reabilitação de articulações, movimentos funcionais e musculares
de pacientes traumatizados, proporcionando ao profissional um controle mais preciso de
velocidade, duração e movimentos de fisioterapia. A construção do protótipo conta com um
motor DC acoplado a órtese, uma órtese em alumínio, com 1 grau de liberdade,
microcontrolador atmega328 programado em linguagem para microcontrolador, podendo ser
controlado remotamente e uma IHM para interface do usuário.
Palavras-chave: Mecatrônica, Reabilitação e Saúde.
Abstract
The steady growth of technology influences the development of electronic equipment
for use in various fields, among them, health geared to the welfare of the human being and
quality of life. Through mechatronics, which covers three technologies together; Mechanics,
electronics and computing, along with the knowledge acquired in the course, we decided to
search for and develop an orthesis automated that assists in physical therapy and rehabilitation
of patients with fractures on upper limbs, allowing the rehabilitation of joints, functional and
muscle movements of traumatized patients, providing professional more precise control of
speed, duration and physiotherapy movements. The construction of the prototype is composed
with a DC motor coupled the orthesis, an orthosis in aluminum, with one degrees of freedom,
microcontroller atmega328 and programming language for microcontroller and an IHM for user
interface.
Keywords: Mechatronics, Rehabilitation and Health.
1 - Aluno do curso de tecnologia em Mecatrônica Industrial – FATEC – Garça
2 - Aluno do curso de tecnologia em Mecatrônica Industrial – FATEC – Garça
3 - Orientador Docente da Faculdade de Tecnologia de Garça

2
1 INTRODUÇÃO
O projeto apresentado neste artigo é resultado de uma pesquisa realizado no
curso de Mecatrônica Industrial da Fatec de Garça, realizada para proporcionar, aos
profissionais da área da saúde, uma órtese dinâmica automatizada para auxílio no
tratamento de pacientes com fratura de cotovelo.
Segundo a Organização Mundial da Saúde (OMS), atualmente, no mundo,
existem mais de um bilhão de pessoas que convivem com alguma forma de deficiência
e, entre estas, 200 milhões vivenciam dificuldades funcionais consideráveis.
A fratura na região do cotovelo pode causar diferentes traumas nos ossos e
articulações, podendo ficar com desvios de sua posição original, aumentando riscos
de incongruência e de artrose (desgaste da cartilagem).
(Gracitelli, 2015) O cotovelo é uma das articulações com maior propensão à rigidez ou à limitação dos movimentos e as principais causas da rigidez do cotovelo são:
Fraturas ou luxações do cotovelo Imobilização prolongada Artrose (degeneração da cartilagem) Artrose secundária (artrite reumatoide)
O projeto se baseia em desenvolver uma órtese, que permite um
aprimoramento da função de um paciente que tenha lesionado, ou com dificuldade de
movimentação, flexão, redução de força, desalinhamento do membro superior;
contribuindo no tratamento e ampliando a capacidade de movimento do mesmo,
podendo também ser utilizada para estabilizar o braço fraturado.
A órtese também tem um papel fundamental na rigidez do cotovelo, pois auxiliam no alongamento de partes moles. As mesmas podem ser estáticas (não permitem movimentos) ou dinâmicas (permite movimento). Diversos estudos médicos demonstram a eficácia do uso das órteses termoplásticas, com um ganho médio de 40° da amplitude de movimento do cotovelo (Gracitelli, 2015).
1.1 Objetivo Geral
Através das tecnologias contempladas no curso de mecatrônica surgiu a ideia
de desenvolver um protótipo, que possa proporcionar ao paciente, recuperação do
movimento do membro superior (braço e antebraço) e agilizar este processo,
automatizando uma órtese dinâmica para utilizar na reabilitação de fraturas do
cotovelo.

3
1.2 Objetivos Específicos
Movimentar a órtese automatizada através de um motor e um controle remoto
infravermelho.
Desenvolver órtese automatizada para recuperar o movimento do paciente.
Ajudar na reabilitação de pessoas com fratura de cotovelo
1.3 Relevância do Projeto
O paciente quando fratura o cotovelo ou sofre alguma luxação perde
parcial/total, temporário ou permanente o movimento do membro dependendo do
caso, devido ao tempo de imobilização. Todavia o acompanhamento com profissionais
da área da saúde é extremamente necessário, no traumatismo e na reabilitação,
durante o tratamento alguns mecanismos como a órtese são utilizados.
“O alongamento é um dos principais métodos utilizados para a recuperação do movimento “ (Segundo Gracitelli, 2015).
Mediante este fato, decidiu-se elaborar um projeto de pesquisa que contribua
com profissionais da área na recuperação deste tipo de lesão através do uso da órtese
automatizada.
2 METODOLOGIA DE DESENVOLVIMENTO
A metodologia utilizada para a elaboração do protótipo é embasada em um
aprofundamento teórico sobre um sistema microcontrolado e controle remoto
infravermelho. Sendo utilizada uma placa de arduíno UNO composta por um
microcontrolador Atmega328 programado com linguagem de microcontrolador.
2.1 Revisões Bibliográficas
Segundo Rosário (2005), a Mecatrônica se constitui na aplicação de complexos
sistemas integrados decorrente das áreas de mecânica, eletroeletrônica, ciência da
computação, e devemos extrair o que é de mais adequado em cada uma das áreas,
que os resultados sejam de tal maneira a simples soma de especialidades, o conceito
de mecatrônica representa a combinação adequada das matérias.

4
2.2 Arduino Uno A placa de desenvolvimento é baseada no microcontrolador ATMEGA328,
fabricado pela ATMEL e foi criado com intuito de facilitar sua utilização. Com isso será
utilizado no projeto a placa, pois se reduzir custos e dimensões do projeto.
O Arduino é uma plataforma de prototipagem de hardware eletrônica, que foi criada em 2005 na cidade de Ivrea, na Itália, com intuito de ensinar Design de Interação, uma disciplina que adota como principal metodologia a prototipação (MOREIRA; PORTELA, SILVA, 2013, p. 121).
2.3 ATMEGA328
Baseado na arquitetura RISC, este é um microcontrolador de 8-bits que dispõe
de 32KB de memória flash, 2KB de memória SRAM e 1KB de memória EEPROM.
Possui 32 registradores de propósito geral, três TIMERS e possibilidade de se utilizar
interrupções internas e externas. Está disponível uma USART, que pode ser
configurada de acordo com as necessidades do usuário. Possui 14 entradas digitais
sendo que, entre essas, 6 podem ser utilizadas como entradas analógicas. Possui um
conversor A/D com resolução de 10 bits e pode funcionar com diversas frequências
de osciladores externos. (MOURA, 2013, p.30)
Os pinos do microcontrolador bem como suas respectivas funções estão
dispostos conforme a Fig. (1).
Fig. (1)
Fonte: http://www.atmel.com/Images/doc8161.pdf
2.4 Tecnologia infravermelha Durante a primeira grande guerra mundial os controles remotos foram utilizados
em navios alemães para colidirem contra barcos aliados. Na segunda grande guerra
mundial o controle remoto era utilizado pela primeira vez para detonar bombas. Com

5
o fim da guerra os cientistas tinham uma tecnologia muito avançada e sem uso,
décadas depois uma tecnologia indispensável no conforto do ser humano.
Conforme Layton, o método infravermelho (IR) consiste em enviar códigos
binários, através de um circuito que gera pulsos curtos e longos, por meio de luz
infravermelha invisível ao olho do ser humano. Um microcontrolador é responsável
por gerar o código e aciona um gerador de frequência que emite esses pulsos. O
equipamento controlado é composto por um receptor IR que capta o pulso enviado e
em conjunto com outro microcontrolador transforma o pulso em código e efetua o
comando.
2.5 Ponte H A ponte H é utilizada para fazer a inversão da rotação do motor, uma ponte H
simples precisa de 4 chaves eletrônicas ou mecânicas posicionadas da seguinte
forma.
O esquema básico de uma ponte H está representado na Fig. (2).
Fig. (2).
Fonte: Patsko (2006).
Segundo Patsko (2006), para que o motor gire basta acionar um par de chaves
na diagonal, 1 e 4 que os polos positivos e negativos serão enviados para o motor.
Para inversão de sentido é preciso desligar as chaves pressionadas e acionar as
outras duas chaves 2 e 3 que o sentido de rotação será invertido.
A ponte H ideal para o motor utilizado no protótipo é com transistor FET, já que
o motor trabalha com uma corrente alta e necessita de uma precisão considerável.

6
Segundo Albuquerque e Seabra (2011), o transistor Fet de potência pertence á
classe dos dispositivos a condução de corrente elétrica, sendo os dispositivos de
potência com maiores velocidades de operação.
3 Síntese e Projeto do Protótipo
Para metodologia do projeto será utilizado os recursos da Mecatrônica, que
trabalha com três áreas em conjunto; Mecânica, Eletrônica e Computação, através de
um protótipo experimental para efetuar testes e análises dos resultados obtidos.
O protótipo em questão é o desenvolvimento de uma órtese dinâmica
automatizada para auxiliar profissionais da área de fisioterapia e terapia ocupacional
na reabilitação da fratura de cotovelo, consiste em uma órtese com estrutura toda em
alumínio, contendo suporte para o braço do paciente feito em tubo pvc, revestido com
material sintético de uso ortopédico para maior conforto e comodidade ao paciente,
um motor DC acoplado a estrutura fará o movimento de flexão e extensão do braço.
RESOLUÇÃO CFM N° 1.956/2010 – Disciplina a prescrição de materiais implantáveis, órteses e próteses e determina arbitragem de especialista quando houver conflito.
Art. 1° Cabe ao médico assistente determinar as características (tipo, matéria-prima, dimensões) das órteses, próteses e materiais especiais implantáveis, bem como o instrumental compatível, necessário e adequado à execução do procedimento (Conselho Federal de Medicina).
Para controlar todo o sistema foi utilizado um microcontrolador programado
para executar o processo de fisioterapia, através do controle remoto infravermelho é
possível comandar acionamento e velocidade do motor contido na órtese, para
movimento nos sentidos horário e anti-horário, proporcionando alongamento e flexão
da articulação atrofiada.
O equipamento conta com uma Interface Homem Maquina (IHM) para
proporcionar controle visual sobre a velocidade e modos de operação automático ou
manual do protótipo.
O projeto tem a vantagem de ter um custo acessível aos profissionais e
pacientes, já que o material da confecção é de baixo custo e eficiente.
Uma órtese não automatizada de termoplástico com regulagem para flexão e
extensão sob media custa em média R$ 800,00 reais segundo o fabricante Ortopedia
americana.

7
O protótipo automatizado custa em média R$ 300,00 reais, ou seja, menos da
metade da órtese de termoplástico. Segue abaixo a tabela referente aos valores de
custo dos materiais utilizados na órtese.
Tabela 1: Custo médio da produção da órtese
Item Preço
Componentes eletrônicos R$180,00
Motor R$ 60,00
Órtese de alumínio R$ 60,00
Fonte: Os autores.
O projeto e as ideias, com o auxílio do software Autodesk Inventor, das peças
protótipo tomaram formas e foram para usinagem.
A órtese projetada está representada na Fig. (3)
Fig. (3) – desenho da órtese no software Inventor
Fonte: Os autores.
Em seguida pesquisas foram feitas para determinar qual o motor ideal para
atender a necessidade do torque e velocidade de movimento necessário no protótipo.
O motor utilizado para atender os parâmetros do protótipo é o micromotor DC
utilizado em várias aplicações na mecatrônica.
A imagem do motor está representada na Fig. (4)

8
Fig. (4) - motor
Fonte: Etonm Motors (2016).
Tabela 2: Especificações Técnicas do motor.
Corrente 60 mA
Tensão Nominal 06 V
Torque 30 Kgf.cm
Velocidade 4 Rpm
Peso 190 g
Fonte: Etonm Motors (2016).
Tabela 3: Especificações técnicas de partida do motor.
Corrente 1 A
Torque 85 kgf.cm
Fonte: Etonm Motors (2016).
O torque necessário para o movimento de flexão e extensão do membro é
referente a massa do indivíduo, com isso decidiu-se utilizar um motor com um torque
de 85 kgf.cm de partida pois a aplicação do motor exige uma partida alta, para atender
pacientes com até 90kg de peso corporal.
A escolha do motor se refere ao peso baixo, que é essencial na aplicação do
equipamento, ao torque de partida alto suficiente para execução do movimento de
flexão e extensão, e a vantagem de não aquecer com sua utilização constante.
3.1 Cálculos do Torque
Para calcular o torque necessário na movimentação do membro utilizamos a
tabela seguinte:

9
Tabela 4: Peso relativo em porcentagem de cada segmento corporal.
Seguimentos Corporais Peso (%)
Cabeça 7.8
Tronco 51
Braço 2.7
Antebraço 1.6
Mão 0.6
Coxa 9.7
Perna 4.5
Pé 1.5
Fonte: Mota (2016).
O movimento será realizado com o apoio da mão e antebraço, que juntos
somam 2.2% do peso total do paciente. Se o paciente tiver 90 Kg de massa o torque
mínimo necessário para movimentar é 2.97 N.m aproximadamente 30kgf.cm.
Fórmulas
Mt = F x D
F = M x A
Onde:
Mt: Torque (N/m)
F: Força (N)
D: Distância (m)
M: Massa (Kg)
A: Aceleração da gravidade (M/s²)
2.2 𝑋 90
100= 1.97 𝐾𝑔
𝐹 = 1.97 𝑋 10

10
𝐹 = 19.7 𝑁
𝐷 = 15𝐶𝑚 = 0.15 𝑚
𝑀𝑡 = 19.7 𝑥 0.15
𝑀𝑡 = 2.97 𝑁𝑚
A imagem da órtese está representada na Fig. (5)
Fig. (5)
Fonte: Os autores
Para acionamento e controle do motor é utilizado uma placa Arduino UNO
contendo um microcontrolador Atmega 328, um display lcd para interface do operador,
com um controle remoto universal variando modos operacionais estabelecidos na
programação do microcontrolador.
O movimento de rotação e inversão do motor é feito através do modulo de
pequena dimensão IBT02 com capacidade de corrente até 30 A, que proporciona a
utilização do circuito diretamente na Órtese proporcionando locomoção do paciente e
fisioterapeuta. O circuito foi desenvolvido com o auxílio do software Proteus e a placa
foi confeccionada através do método de foto transferência. A placa é implantada
diretamente na órtese
O diagrama elétrico está representado na Fig. (6)

11
Fig. (6)
Fonte: Os autores
O circuito utiliza uma bateria de 9 v que alimenta o motor e o circuito de controle
proporcionando a vantagem de ser compacto e leve.
Para confecção da placa foi utilizado um método de fototransferência, que
necessita de uma lâmpada luz negra para revelar a imagem impressa no fotolito para
placa, e em seguida corroída com percloreto de ferro.
A imagem do circuito confeccionado é mostrada na Fig. (7)
Fig. (7) Fonte: Os autores.
12
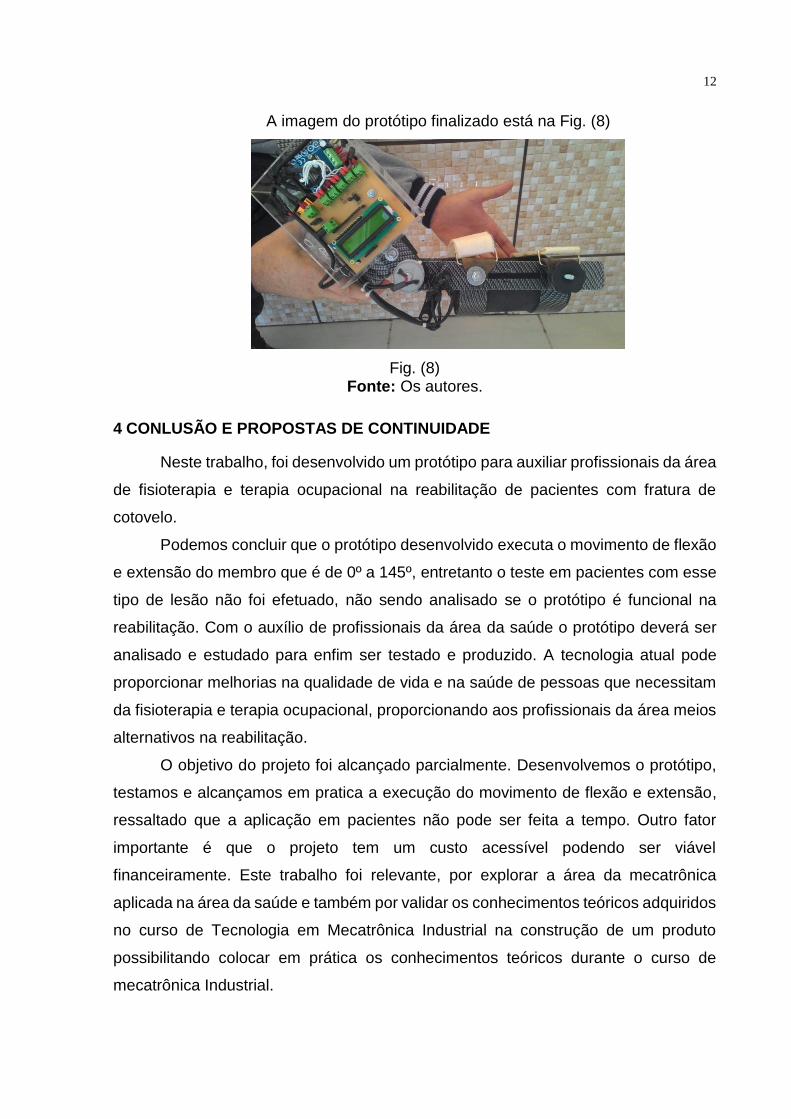
A imagem do protótipo finalizado está na Fig. (8)
Fig. (8) Fonte: Os autores.
4 CONLUSÃO E PROPOSTAS DE CONTINUIDADE
Neste trabalho, foi desenvolvido um protótipo para auxiliar profissionais da área
de fisioterapia e terapia ocupacional na reabilitação de pacientes com fratura de
cotovelo.
Podemos concluir que o protótipo desenvolvido executa o movimento de flexão
e extensão do membro que é de 0º a 145º, entretanto o teste em pacientes com esse
tipo de lesão não foi efetuado, não sendo analisado se o protótipo é funcional na
reabilitação. Com o auxílio de profissionais da área da saúde o protótipo deverá ser
analisado e estudado para enfim ser testado e produzido. A tecnologia atual pode
proporcionar melhorias na qualidade de vida e na saúde de pessoas que necessitam
da fisioterapia e terapia ocupacional, proporcionando aos profissionais da área meios
alternativos na reabilitação.
O objetivo do projeto foi alcançado parcialmente. Desenvolvemos o protótipo,
testamos e alcançamos em pratica a execução do movimento de flexão e extensão,
ressaltado que a aplicação em pacientes não pode ser feita a tempo. Outro fator
importante é que o projeto tem um custo acessível podendo ser viável
financeiramente. Este trabalho foi relevante, por explorar a área da mecatrônica
aplicada na área da saúde e também por validar os conhecimentos teóricos adquiridos
no curso de Tecnologia em Mecatrônica Industrial na construção de um produto
possibilitando colocar em prática os conhecimentos teóricos durante o curso de
mecatrônica Industrial.

13
5 REFERÊNCIAS
GRACITELLI, M. Rigidez do cotovelo - Limitação dos movimentos do cotovelo
disponível em: < http://maurogracitelli.com/blog/limitacao-dos-movimentos-do-
cotovelo-rigidez-do-cotovelo>. Acesso em: 22 mar. 2016. RÔMULO, O. A.; SEABRA. A. C. Utilizando eletrônica com AO, SCR, TRIAC, UJT, PUT, CI555, LDR, LED, IGBT e FET de Potência. 3º Reimpressão. São Paulo. 2011- Editora Érica Ltda.
ALVES, M, V, P. Cinesiologia e Biomecânica Disponível em: <
ttp://pt.slideshare.net/MarcusAlves2/apostila-cinesiologia-e-
biomecnica?from_action=save>. Acesso em: 22 mar. 2016. ROSÁRIO, J. M. Princípios de mecatrônica. 6. ed. Reimpressão. São Paulo: Baraúna, 2011. Relatório mundial sobre a deficiência. Disponível em: <http://www.pessoacomdeficiencia.sp.gov.br/usr/share/documents/relatorio_mundial_completo.pdf>. Acesso em: 24 mar. 2016.
Banzi, M. Primeiros passos com o arduino. São Paulo: Novatec Editora, 2011. Como funcionam os controles remotos. Disponível em: < http://tecnologia.hsw.uol.com.br/controle-remoto.htm>. Acesso em: 4 abr. 2016. Tutorial montagem da ponte H. Disponível em: <http://www.maxwellbohr.com.br/downloads/robotica/mec1000_kdr5000/tutorial_eletronica_-_montagem_de_uma_ponte_h.pdf>. Acesso em: 10 abr. 2016. Ortopedia Americana Disponível em: < http://www.ortopediaamerica.com.br/index.php>. Acesso em: 15 abr. 2016. Etonm Motors Disponível em: < http://pt.etonm.com/>. Acesso em: 25 maio. 2016.