global register allocation via graph coloring comp 412 copyright 2010, keith d. cooper & linda...
TRANSCRIPT
Global Register Allocationvia Graph Coloring
Comp 412
Copyright 2010, Keith D. Cooper & Linda Torczon, all rights reserved.Students enrolled in Comp 412 at Rice University have explicit permission to make copies of these materials for their personal use. Faculty from other educational institutions may use these materials for nonprofit educational purposes, provided this copyright notice is preserved.
COMP 412FALL 2010
This lecture focuses on the Chaitin-Briggs approach, which EaC calls the bottom-up global algorithm.
This lecture focuses on the Chaitin-Briggs approach, which EaC calls the bottom-up global algorithm.
Notes on the Final Exam
• Closed-notes, closed-book exam• Exam available Wednesday.• Three hour time limit
— I aimed for a two-hour exam, but I don’t want you to feel time pressure. You may take one break of up to fifteen minutes apiece.
• You are responsible for the entire course— Exam focuses primarily on material since the midterm— Chapters 5, 6, 7, 8, 9.1, 9.2, 11, 12, & 13— All the lecture notes
• Return the exam to DH 3080 (Penny Anderson’s office) by 5PM on the last day of exams – December 15, 2010
• If you must leave, you can email me a Word file or a PDF document.
Comp 412, Fall 2010 2
Comp 412, Fall 2010 3
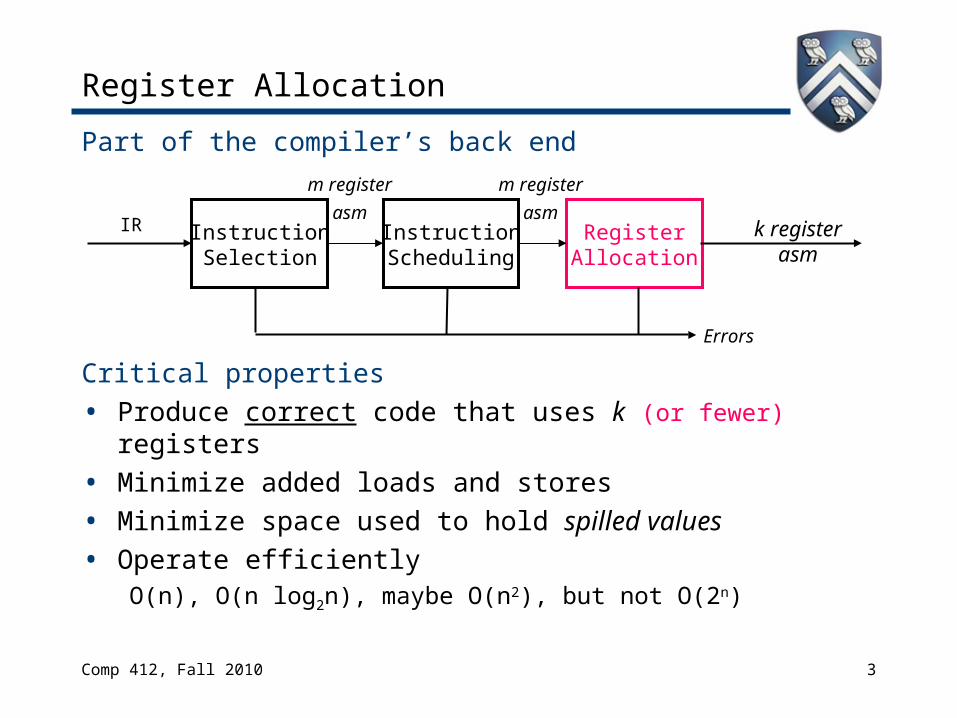
Register Allocation
Part of the compiler’s back end
Critical properties• Produce correct code that uses k (or fewer) registers• Minimize added loads and stores• Minimize space used to hold spilled values• Operate efficiently
O(n), O(n log2n), maybe O(n2), but not O(2n)
RegisterAllocation
Errors
IR InstructionSelection
k register asm
InstructionScheduling
m register
asm
m register
asm

Comp 412, Fall 2010 4
Global Register Allocation
The Big Picture
At each point in the code1 Determine which values will reside in registers2 Select a register for each such valueThe goal is an allocation that “minimizes” running time
Most modern, global allocators use a graph-coloring paradigm
• Build a “conflict graph” or “interference graph”• Find a k-coloring for the graph, or change the code to a
nearby problem that it can k-color
RegisterAllocator
m register code
k register code
Optimal global allocation is NP-Complete, under almost any assumptions.
Optimal global allocation is NP-Complete, under almost any assumptions.
Comp 412, Fall 2010 5
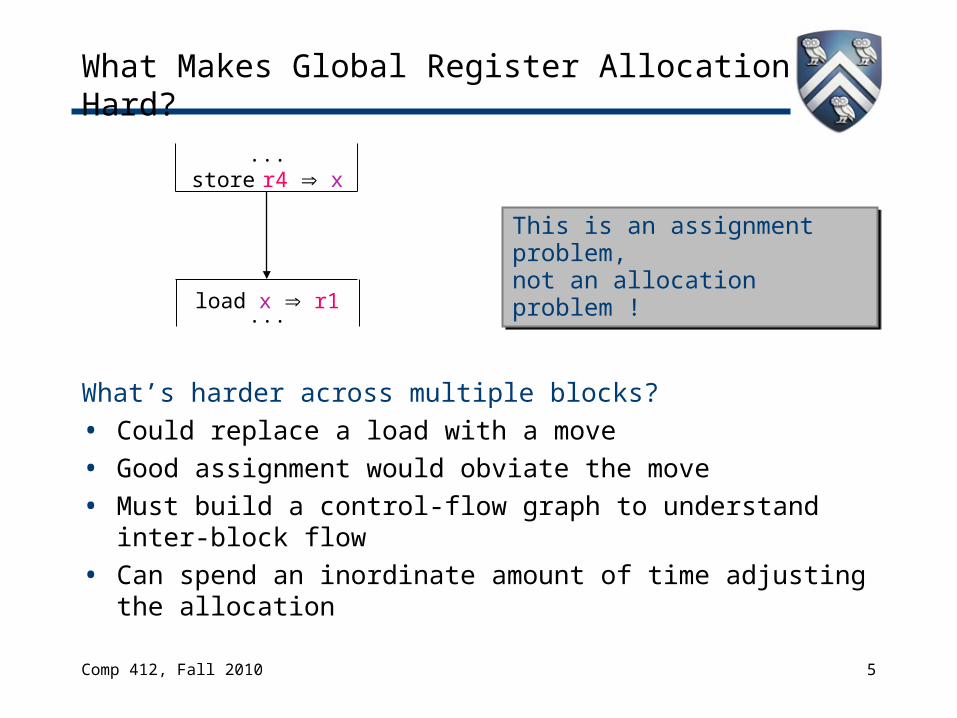
What Makes Global Register Allocation Hard?
What’s harder across multiple blocks?• Could replace a load with a move• Good assignment would obviate the move• Must build a control-flow graph to understand inter-block
flow• Can spend an inordinate amount of time adjusting the
allocation
...store r4 x
load x r1...
This is an assignment problem,not an allocation problem !
This is an assignment problem,not an allocation problem !
Comp 412, Fall 2010 6
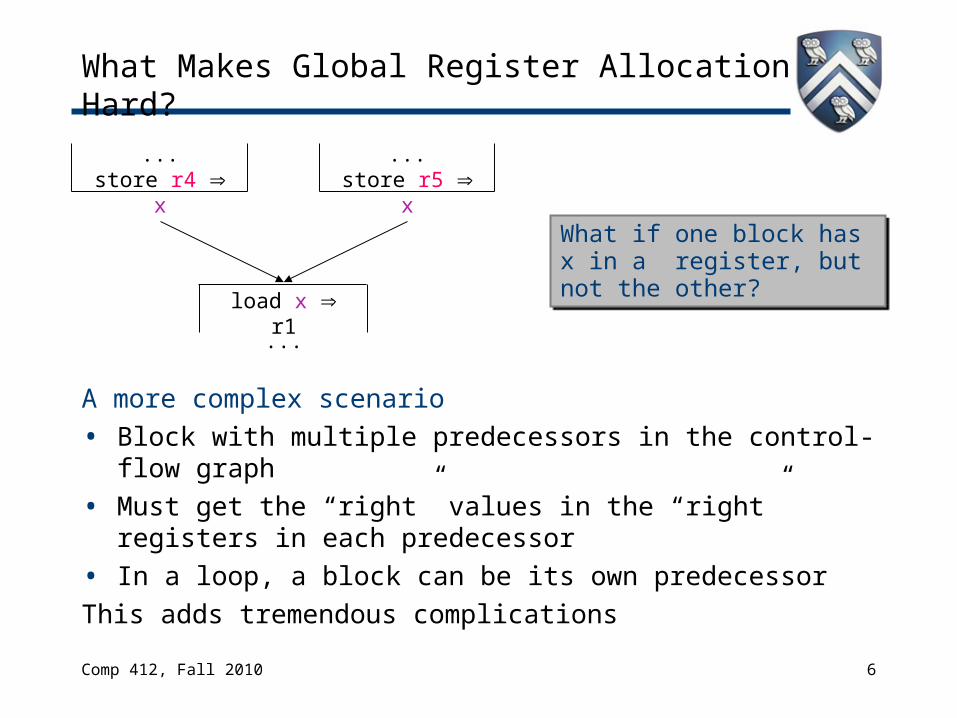
What Makes Global Register Allocation Hard?
A more complex scenario• Block with multiple predecessors in the control-flow
graph• Must get the “right” values in the “right” registers in
each predecessor• In a loop, a block can be its own predecessorThis adds tremendous complications
...store r4 x
load x r1...
...store r5 x
What if one block has x in a register, but not the other?
What if one block has x in a register, but not the other?
Comp 412, Fall 2010 7
Global Register Allocation
Taking a global approach• Abandon the distinction between local & global • Make systematic use of registers or memory• Adopt a general scheme to approximate a good
allocation
Graph coloring paradigm (Lavrov & (later) Chaitin )
1 Build an interference graph GI for the procedure— Computing LIVE is harder than in the local case— GI is not an interval graph
2 (try to) construct a k-coloring— Minimal coloring is NP-Complete— Spill placement becomes a critical issue
3 Map colors onto physical registers

Comp 412, Fall 2010 8
Graph Coloring (A Background Digression)
The problemA graph G is said to be k-colorable iff the nodes can be labeled with integers 1 … k so that no edge in G connects two nodes with the same label
ExamplesExamples
Each color can be mapped to a distinct physical register
2-colorable 3-colorable

Comp 412, Fall 2010 9
Building the Interference Graph
What is an “interference” ? (or conflict)• Two values interfere if there exists an operation where
both are simultaneously live• If x and y interfere, they cannot occupy the same registerTo compute interferences, we must know where values are
“live”
The interference graph, GI = (NI,EI)
• Nodes in GI represent values, or live ranges
• Edges in GI represent individual interferences
— For x, y NI, <x,y> EI iff x and y interfere
• A k-coloring of GI can be mapped into an allocation to k registers

Comp 412, Fall 2010 10
Building the Interference Graph
To build the interference graph
1 Discover live ranges> Construct the SSA form of the procedure> At each ø-function, take the union of the arguments> Rename to reflect these new “live ranges”
2 Compute LIVE sets over live ranges for each block> Use an iterative data-flow solver> Solve equations for LIVE over domain of live range names
3 Iterate over each block, from bottom to top> Track the current LIVE set> At each operation, add appropriate edges & update LIVE
Add an edge from result to each value in LIVE Remove result from LIVE Add each operand to LIVE
Update the LIVE sets
No SSA yet?No SSA yet?

Comp 412, Fall 2010 11
Computing LIVE Sets
A value v is live at p if a path from p to someuse of v along which v is not re-defined
Data-flow problems are expressed as simultaneous equations
LIVEOUT(b) = ssucc(b) LIVEIN(s)
LIVEIN(b) = UEVAR(b) (LIVEOUT(b) VARKILL(b))
LIVEOUT(nf) =
whereUEVAR(b) is the set of names used in block b before being
defined in bVARKILL(b) is the set of names defined in b
Solve the equations using a fixed-point iterative scheme
Solve the equations using a fixed-point iterative scheme
§ 9.2.1 in EaC1e§ 8.6.1 in EaC2e
§ 9.2.1 in EaC1e§ 8.6.1 in EaC2e

Comp 412, Fall 2010 12
Computing LIVE Sets
The compiler can solve these equations with a simple algorithm
The world’s quickest introduction to data-flow analysis !
WorkList { all blocks }while ( WorkList ≠ Ø) remove a block b from WorkList Compute LIVEOUT(b) Compute LIVEIN(b) if LIVEIN(b) changed then add pred (b) to WorkList
WorkList { all blocks }while ( WorkList ≠ Ø) remove a block b from WorkList Compute LIVEOUT(b) Compute LIVEIN(b) if LIVEIN(b) changed then add pred (b) to WorkList
The Worklist Iterative Algorithm
The Worklist Iterative Algorithm
Why does this work? LIVEOUT, LIVEIN 2Names
UEVAR, VARKILL are constants for b
Equations are monotone Finite # of additions to sets will reach a fixed point !
Speed of convergence depends on the order in which blocks are “removed” & their sets recomputed
Why does this work? LIVEOUT, LIVEIN 2Names
UEVAR, VARKILL are constants for b
Equations are monotone Finite # of additions to sets will reach a fixed point !
Speed of convergence depends on the order in which blocks are “removed” & their sets recomputed

Comp 412, Fall 2010 13
Observation on Coloring for Register Allocation
• Suppose you have k registers—look for a k coloring
• Any vertex n that has fewer than k neighbors in the interference graph (n < k) can always be colored !— Pick any color not used by its neighbors — there must be
one
• Ideas behind Chaitin’s algorithm:— Pick any vertex n such that n< k and put it on the stack— Remove that vertex and all edges incident from the
interference graph This may make additional nodes have fewer than k neighbors
— At the end, if some vertex n still has k or more neighbors, then spill the live range associated with n
— Otherwise successively pop vertices off the stack and color them in the lowest color not used by some neighbor
Comp 412, Fall 2010 14
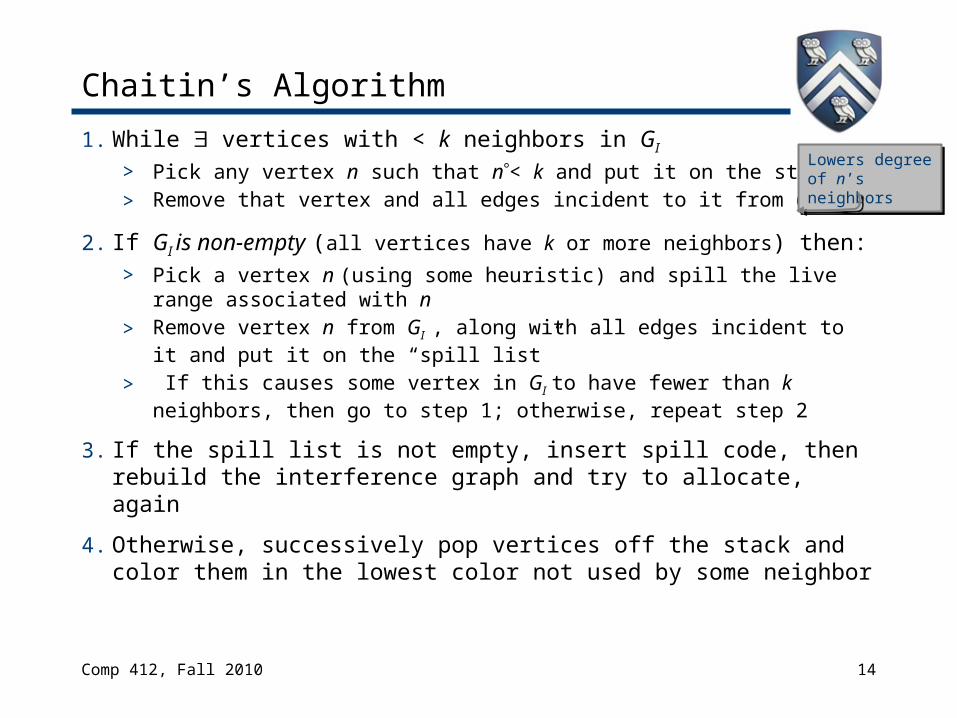
Chaitin’s Algorithm
1. While vertices with < k neighbors in GI
> Pick any vertex n such that n< k and put it on the stack> Remove that vertex and all edges incident to it from GI
2. If GI is non-empty (all vertices have k or more neighbors) then:> Pick a vertex n (using some heuristic) and spill the live
range associated with n> Remove vertex n from GI , along with all edges incident to it
and put it on the “spill list”> If this causes some vertex in GI to have fewer than k
neighbors, then go to step 1; otherwise, repeat step 2
3. If the spill list is not empty, insert spill code, then rebuild the interference graph and try to allocate, again
4. Otherwise, successively pop vertices off the stack and color them in the lowest color not used by some neighbor
Lowers degree of n’s neighbors
Lowers degree of n’s neighbors

Comp 412, Fall 2010 15
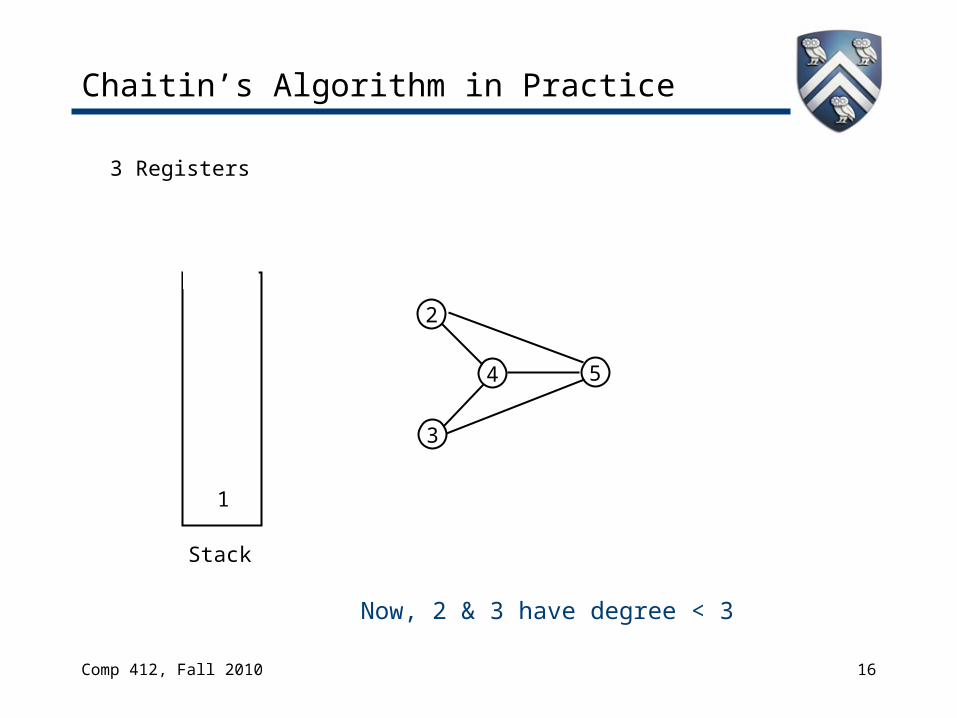
Chaitin’s Algorithm in Practice
2
3
1 4 5
3 Registers
Stack
1 is the only node with degree < 3
Comp 412, Fall 2010 16
Chaitin’s Algorithm in Practice
2
3
4 5
3 Registers
Stack
1
Now, 2 & 3 have degree < 3

Comp 412, Fall 2010 17
Chaitin’s Algorithm in Practice
3
4 5
3 Registers
Stack
1
2
Now all nodes have degree < 3

Comp 412, Fall 2010 18
Chaitin’s Algorithm in Practice
3
5
3 Registers
Stack
1
24

Comp 412, Fall 2010 19
Chaitin’s Algorithm in Practice
3 Registers
Stack
1
243
5
Colors:
1:
2:
3:

Comp 412, Fall 2010 20
Chaitin’s Algorithm in Practice
5
3 Registers
Stack
1
243
Colors:
1:
2:
3:

Comp 412, Fall 2010 21
Chaitin’s Algorithm in Practice
3
5
3 Registers
Stack
1
24
Colors:
1:
2:
3:

Comp 412, Fall 2010 22
Chaitin’s Algorithm in Practice
3
4 5
3 Registers
Stack
1
2
Colors:
1:
2:
3:
Comp 412, Fall 2010 23
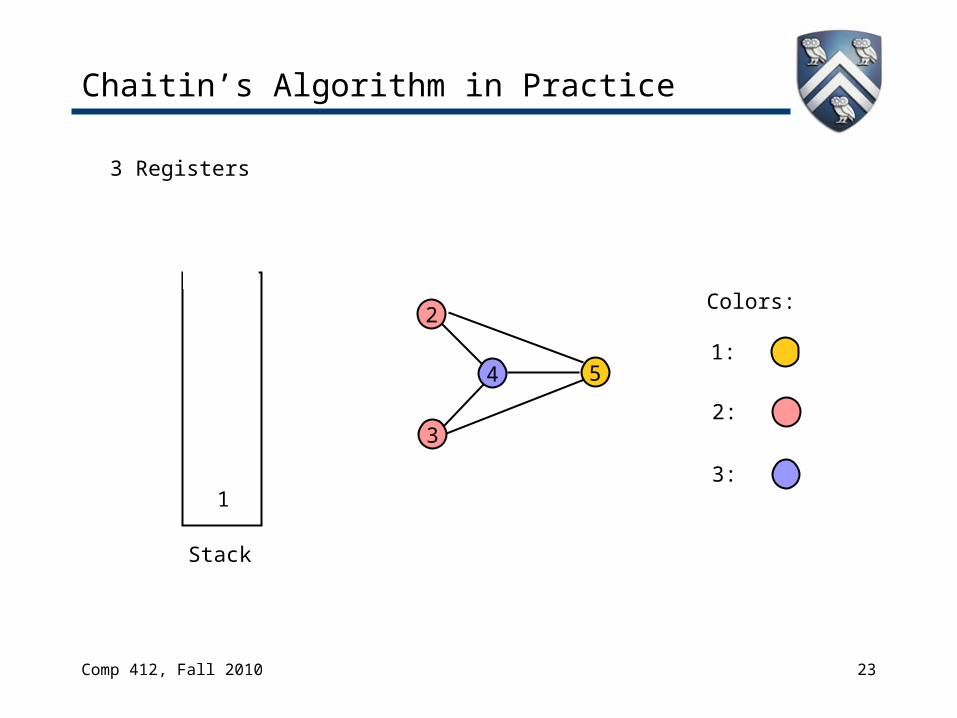
Chaitin’s Algorithm in Practice
2
3
4 5
3 Registers
Stack
1
Colors:
1:
2:
3:
Comp 412, Fall 2010 24
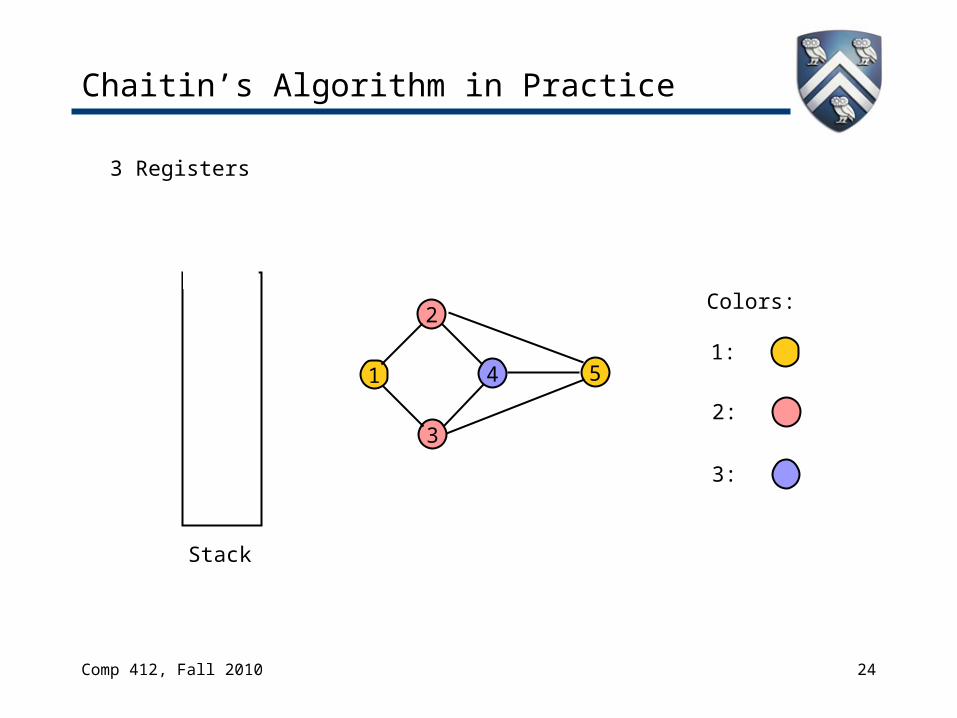
Chaitin’s Algorithm in Practice
2
3
1 4 5
3 Registers
Stack
Colors:
1:
2:
3:
Comp 412, Fall 2010 25
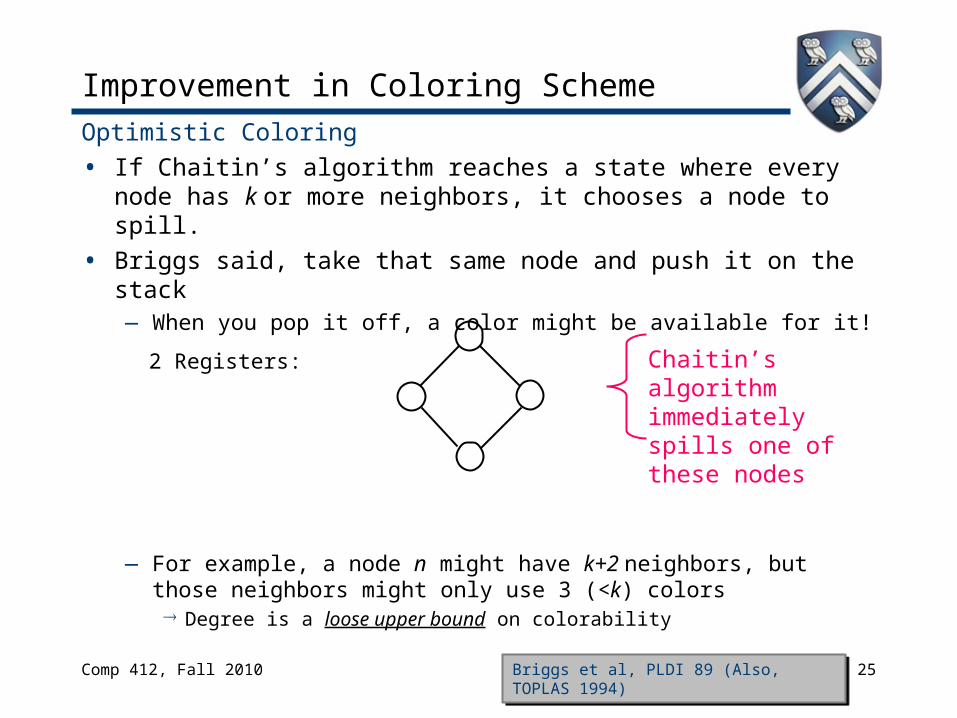
Improvement in Coloring Scheme
Optimistic Coloring • If Chaitin’s algorithm reaches a state where every node
has k or more neighbors, it chooses a node to spill.• Briggs said, take that same node and push it on the
stack — When you pop it off, a color might be available for it!
— For example, a node n might have k+2 neighbors, but those neighbors might only use 3 (<k) colors Degree is a loose upper bound on colorability
2 Registers: Chaitin’s algorithm immediately spills one of these nodes
Briggs et al, PLDI 89 (Also, TOPLAS 1994)Briggs et al, PLDI 89 (Also, TOPLAS 1994)
Comp 412, Fall 2010 26
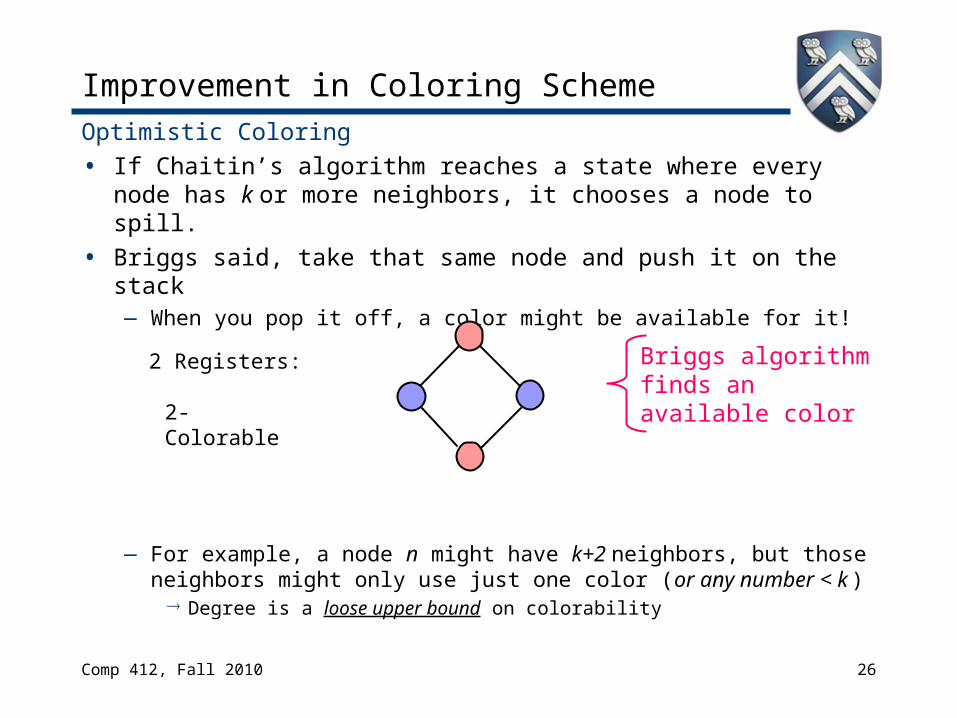
Improvement in Coloring Scheme
Optimistic Coloring• If Chaitin’s algorithm reaches a state where every node
has k or more neighbors, it chooses a node to spill.• Briggs said, take that same node and push it on the
stack — When you pop it off, a color might be available for it!
— For example, a node n might have k+2 neighbors, but those neighbors might only use just one color (or any number < k )
Degree is a loose upper bound on colorability
2 Registers:
2-Colorable
Briggs algorithm finds an available color
Comp 412, Fall 2010 27
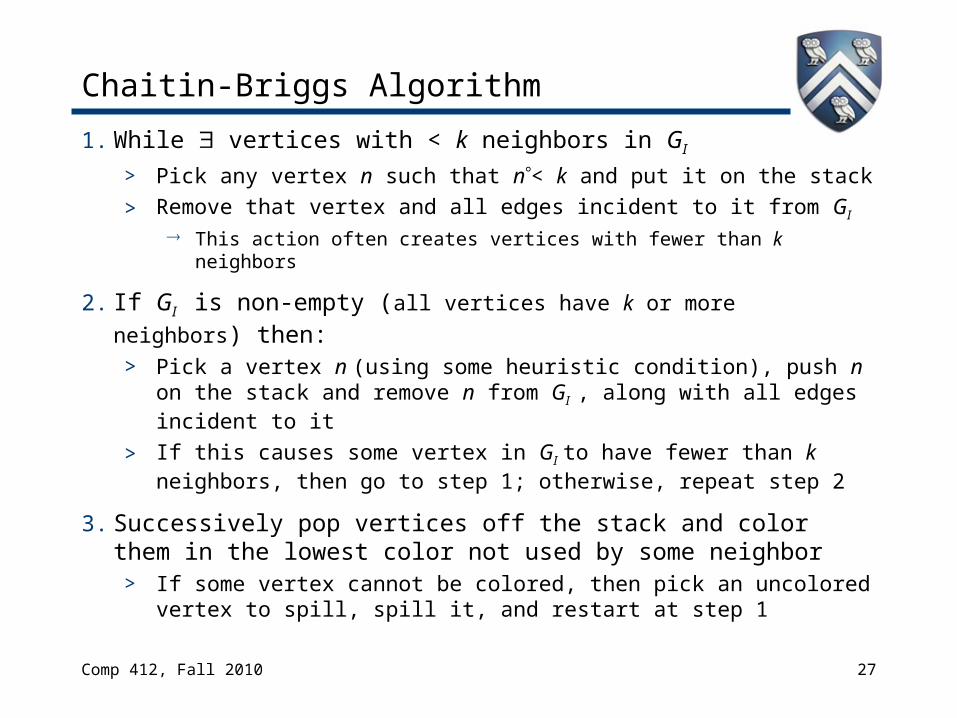
Chaitin-Briggs Algorithm
1. While vertices with < k neighbors in GI
> Pick any vertex n such that n< k and put it on the stack
> Remove that vertex and all edges incident to it from GI
This action often creates vertices with fewer than k neighbors
2. If GI is non-empty (all vertices have k or more neighbors) then:> Pick a vertex n (using some heuristic condition), push n on
the stack and remove n from GI , along with all edges incident to it
> If this causes some vertex in GI to have fewer than k neighbors, then go to step 1; otherwise, repeat step 2
3. Successively pop vertices off the stack and color them in the lowest color not used by some neighbor> If some vertex cannot be colored, then pick an uncolored
vertex to spill, spill it, and restart at step 1

Comp 412, Fall 2010 28
Chaitin-Briggs in Practice
4
2
1
3
2 Registers
Stack
No node has degree < 2•Chaitin would spill a node•Briggs picks the same node & stacks it

Comp 412, Fall 2010 29
Chaitin-Briggs in Practice
4
2
1
3
2 Registers
Stack
Pick a node, say 1

Comp 412, Fall 2010 30
Chaitin-Briggs in Practice
4
2
3
2 Registers
Stack
1
Pick a node, say 1

Comp 412, Fall 2010 31
Chaitin-Briggs in Practice
4
2
3
2 Registers
Stack
1
Now, both 2 & 3 have degree < 2Pick one, say 3
Comp 412, Fall 2010 32
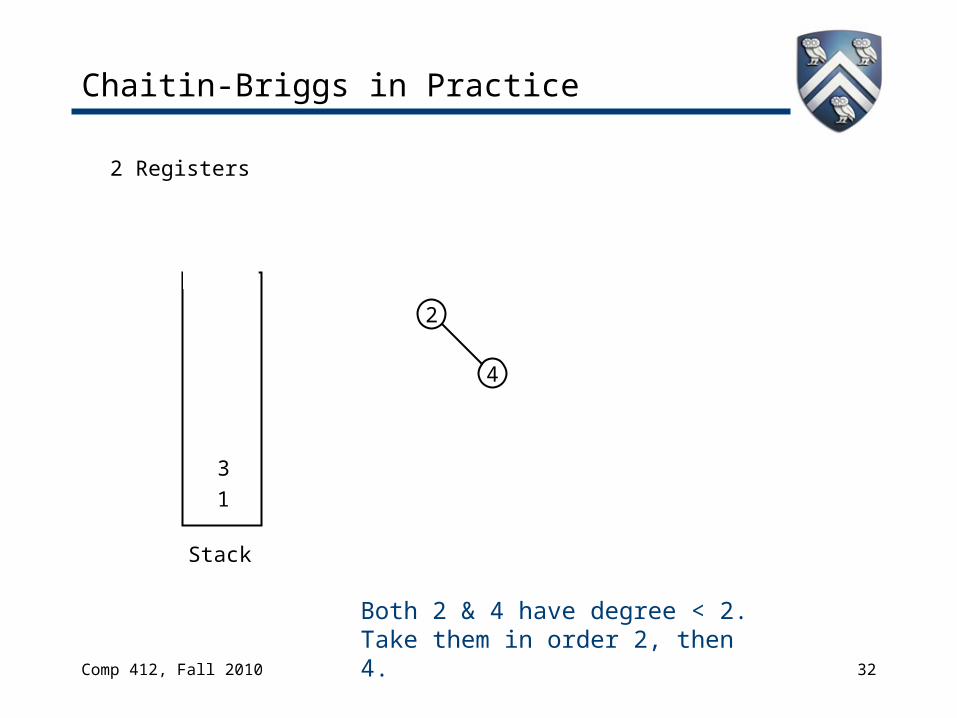
Chaitin-Briggs in Practice
4
2
2 Registers
Stack
1
3
Both 2 & 4 have degree < 2.Take them in order 2, then 4.
Comp 412, Fall 2010 33
Chaitin-Briggs in Practice
4
2 Registers
Stack
1
32

Comp 412, Fall 2010 34
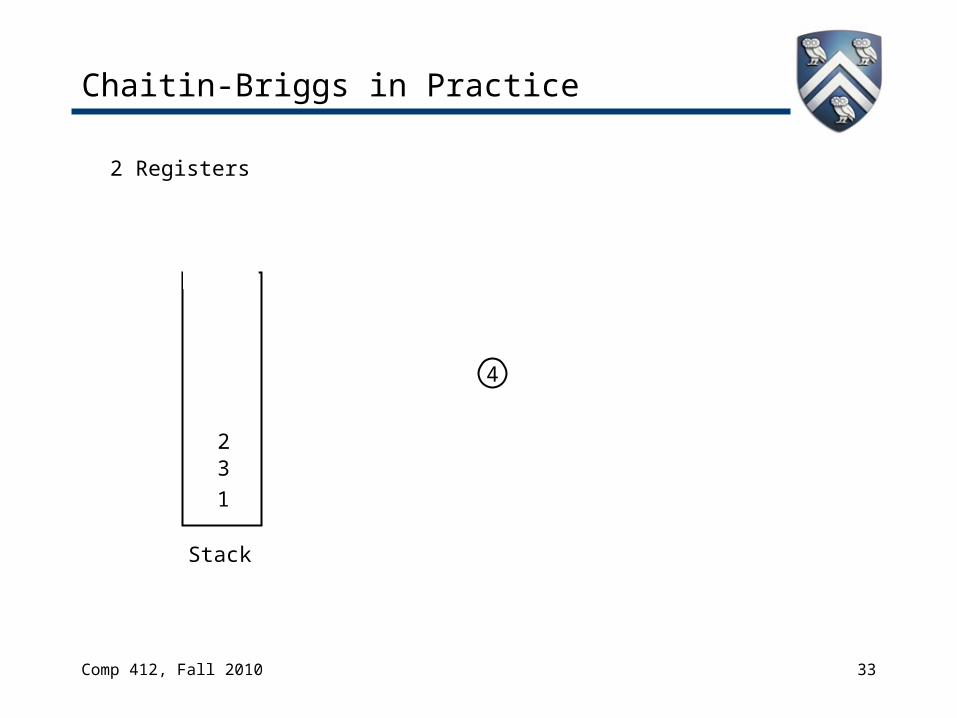
Chaitin-Briggs in Practice
2 Registers
Stack
1
324
Now, rebuild the graph

Comp 412, Fall 2010 35
Chaitin-Briggs in Practice
4
2 Registers
Stack
1
32
Colors:
1:
2:

Comp 412, Fall 2010 36
Chaitin-Briggs in Practice
4
2
2 Registers
Stack
1
3
Colors:
1:
2:
Comp 412, Fall 2010 37
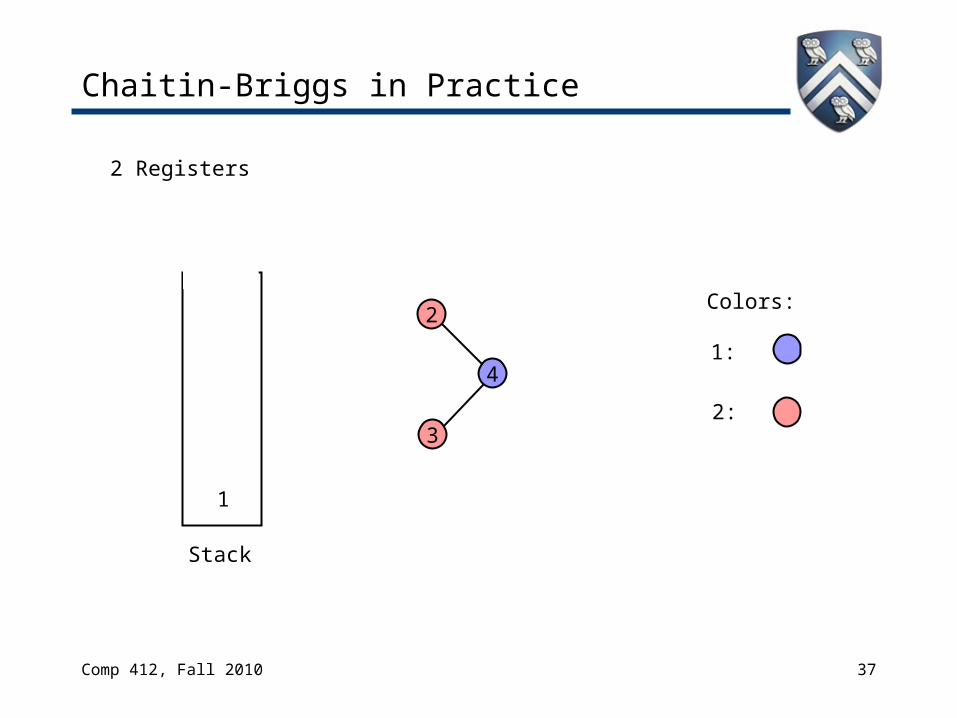
Chaitin-Briggs in Practice
4
2
3
2 Registers
Stack
1
Colors:
1:
2:

Comp 412, Fall 2010 38
Chaitin-Briggs in Practice
4
2
1
3
2 Registers
Stack
Colors:
1:
2:
Comp 412, Fall 2010 39
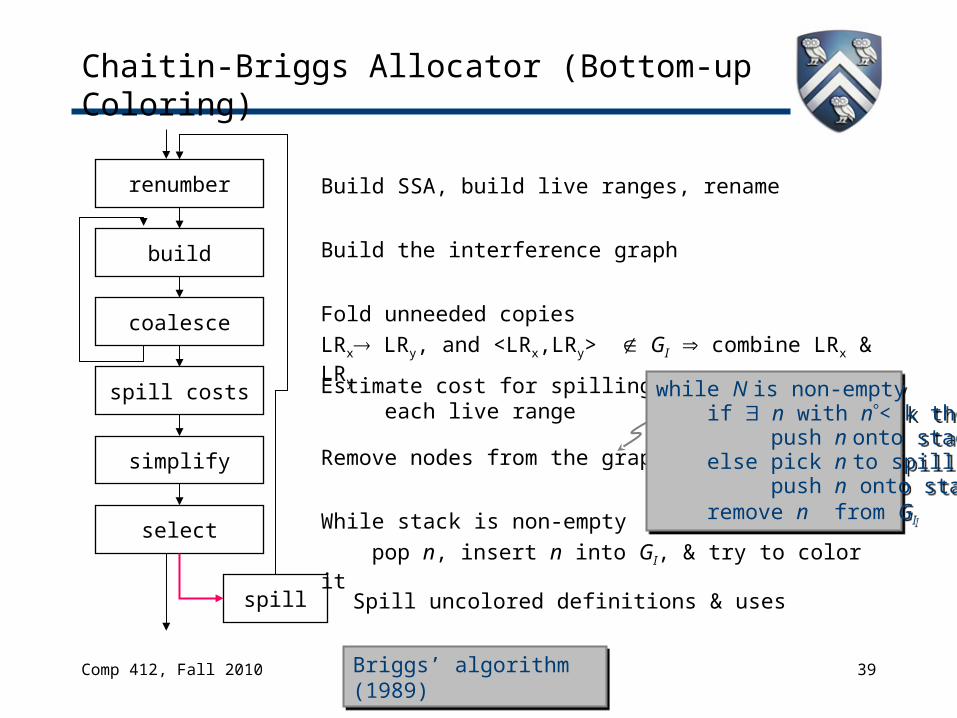
Chaitin-Briggs Allocator (Bottom-up Coloring)
renumber
build
coalesce
spill costs
simplify
select
spill
Build SSA, build live ranges, rename
Build the interference graph
Fold unneeded copies LRx LRy, and <LRx,LRy> GI combine LRx & LRy
Remove nodes from the graph
Spill uncolored definitions & uses
While stack is non-empty pop n, insert n into GI, & try to color it
Estimate cost for spilling each live range
Briggs’ algorithm (1989)Briggs’ algorithm (1989)
while N is non-empty if n with n< k then push n onto stack else pick n to spill push n onto stack remove n from GI
while N is non-empty if n with n< k then push n onto stack else pick n to spill push n onto stack remove n from GI

Comp 412, Fall 2010 40
Chaitin’s Allocator (Bottom-up Coloring)
renumber
build
coalesce
spill costs
simplify
select
spill
Build SSA, build live ranges, rename
Build the interference graph
Fold unneeded copies LRx LRy, and <LRx,LRy> GI combine LRx & LRy
Remove nodes from the graph
Spill uncolored definitions & uses
While stack is non-empty pop n, insert n into GI, & try to color it
Estimate cost for spilling each live range
Chaitin’s algorithm For contrast, Chaitin’s algorithm
(1981)For contrast, Chaitin’s algorithm (1981)
Quick Aside …Quick Aside …
while N is non-empty if n with n< k then push n onto stack else pick n to spill mark n for spill pass remove n from GI
while N is non-empty if n with n< k then push n onto stack else pick n to spill mark n for spill pass remove n from GI
Comp 412, Fall 2010 41
Other Improvements to Chaitin-BriggsSpilling partial live ranges [Bergner PLDI 97]• Bergner introduced interference region spilling• Limits spilling to regions of high demand for registers
Splitting live ranges [Simpson CC 98, Eckhardt ICPLC
05]• Simple idea — break up one or more live ranges• Allocator can use different registers for distinct subranges• Allocator can spill subranges independently (use 1 spill
location)
Iterative coalescing [George & Appel]• Use conservative coalescing because it is “safe”• Simplify the graph until only non-trivial nodes remain• Coalesce & try again • If coalescing does not reveal trivial nodes, then spill

Comp 412, Fall 2010 42
Chaitin-Briggs Allocator (Bottom-up Global)
Strengths & Weaknesses Precise interference graph Strong coalescing mechanism Handles register assignment well Runs fairly quickly
Known to overspill in tight cases Interference graph has no geography Spills a live range everywhere Long blocks devolve into spilling by use counts
Is improvement still possible ?
• Rising spill costs, aggressive transformations, & long blocks
yes, but the returns are getting rather small

Comp 412, Fall 2010 43
What about Top-down Coloring?
The Big Picture• Use high-level priorities to rank live ranges• Allocate registers for them in priority order• Use coloring to assign specific registers to live ranges
The Details• Separate constrained from unconstrained live ranges
> A live range is constrained if it has ≥ k neighbors in GI
• Color constrained live ranges first• Reserve pool of local registers for spilling (or spill &
iterate)• Chow split live ranges before spilling them
> Split into block-sized pieces> Recombine as long as k
Use spill costs as priority function !Use spill costs as priority function !
Unconstrained must receive a color !Unconstrained must receive a color !
Peixotto’s 2007 MS thesis shows that top-down, in general, produces worse results unless we add an (expensive) adaptive feedback loop
Peixotto’s 2007 MS thesis shows that top-down, in general, produces worse results unless we add an (expensive) adaptive feedback loop

Comp 412, Fall 2010 44
What about Top-down Coloring?
The Big Picture• Use high-level priorities to rank live ranges• Allocate registers for them in priority order• Use coloring to assign specific registers to live ranges
More Details• Chow used an imprecise interference graph
— <x,y> GI x,y Live(b) for some block b
— Cannot coalesce live ranges since xy <x,y> GI
• Quicker to build imprecise graph— Chow’s allocator may run faster on small codes, where
demand for registers is also likely to be lower
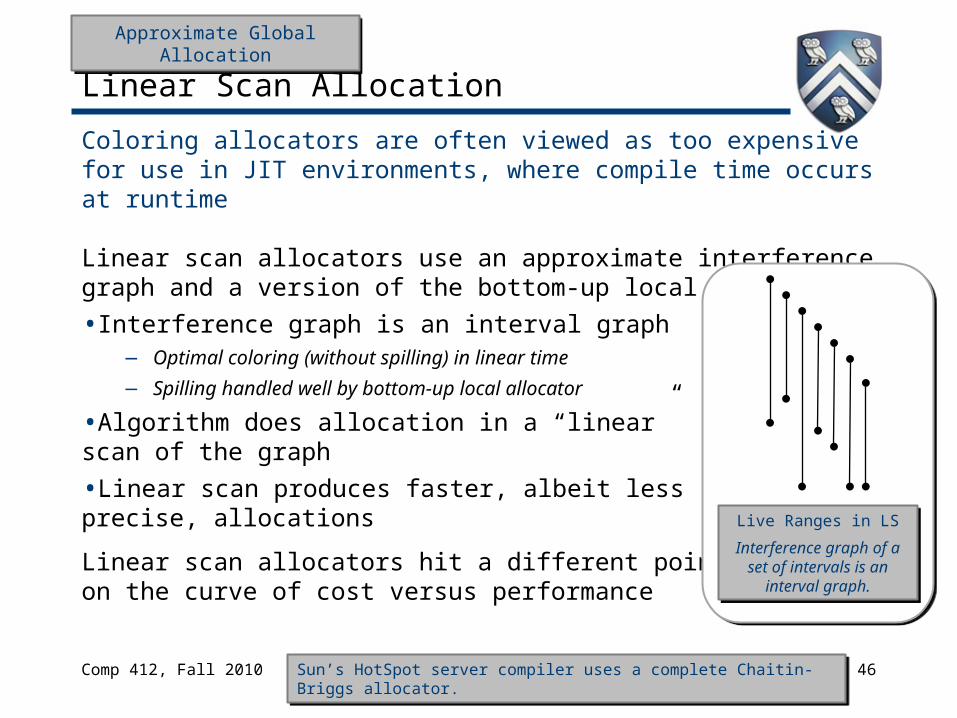
Linear Scan Allocation
Coloring allocators are often viewed as too expensive for use in JIT environments, where compile time occurs at runtime
Linear scan allocators use an approximate interference graph and a version of the bottom-up local algorithm
•Interference graph is an interval graph— Optimal coloring (without spilling) in linear time
— Spilling handled well by bottom-up local allocator
•Algorithm does allocation in a “linear” scan of the graph
•Linear scan produces faster, albeit less precise, allocations
Linear scan allocators hit a different pointon the curve of cost versus performanceComp 412, Fall 2010 46Sun’s HotSpot server compiler uses a complete Chaitin-Briggs
allocator.Sun’s HotSpot server compiler uses a complete Chaitin-Briggs allocator.
Approximate Global Allocation
Approximate Global Allocation
Live Ranges in LS
Interference graph of a set of intervals is an
interval graph.
Live Ranges in LS
Interference graph of a set of intervals is an
interval graph.

Linear Scan Allocation
Building the Interval Graph
• Consider the procedure as a linear list of operations
• A live range for some name is an interval (x,y)— x and y are the indices of two operations in the list, with x < y
— Every operation where name is live falls between x & y, inclusive
Precision of live computation can vary with cost
— Interval graph overestimates interference
The Algorithm
• Use Best’s algorithm — bottom-up local
• Distance to next use is well defined
• Algorithm is fast & produces reasonable allocations
Variations have been proposed that build on this scheme
Comp 412, Fall 2010 47
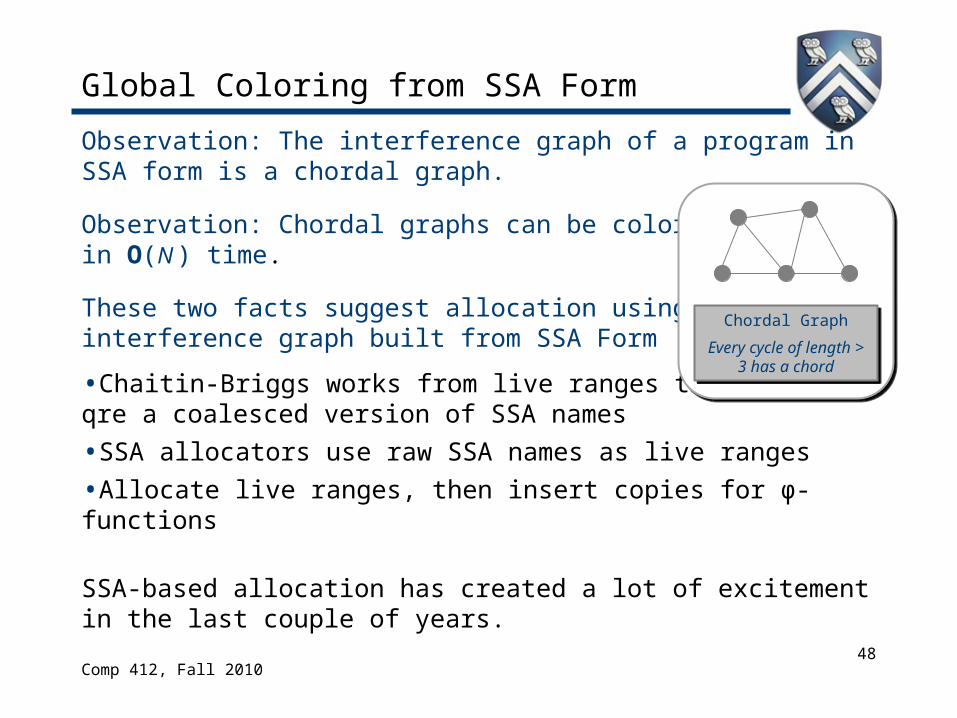
Global Coloring from SSA Form
Observation: The interference graph of a program in SSA form is a chordal graph.
Observation: Chordal graphs can be colored in O(N ) time.
These two facts suggest allocation using an interference graph built from SSA Form
•Chaitin-Briggs works from live ranges thatqre a coalesced version of SSA names
•SSA allocators use raw SSA names as live ranges
•Allocate live ranges, then insert copies for φ-functions
SSA-based allocation has created a lot of excitement in the last couple of years.
Comp 412, Fall 201048
Chordal Graph
Every cycle of length > 3 has a
chord
Chordal Graph
Every cycle of length > 3 has a
chord
Global Coloring from SSA Form
Coloring from SSA Names has its advantages• If graph is k-colorable, it finds the coloring
— (Opinion ) An SSA-based allocator will find more k-colorable graphs than a live-range based allocator because SSA names are shorter and, thus, have fewer interferences.
• Allocator should be faster than a live-range allocator— Cost of live analysis folded into SSA construction, where it
is amortized over other passes— Biggest expense in Chaitin-Briggs is the Build-Coalesce
phase, which SSA allocator avoids, as it destroys the chordal graph
Comp 412, Fall 2010 49

Global Coloring from SSA Form
Coloring from SSA Names has its disadvantages
• Coloring is rarely the problem— Most non-trivial codes spill; on trivial codes, both SSA
allocator and classic Chaitin-Briggs are overkill. (Try linear scan?)
• SSA form provides no obvious help on spilling— Shorter live ranges will produce local spilling (good & bad)
— May increase spills inside loops
• After allocation, code is still in SSA form— Need out-of-SSA translation
— Introduce copies after allocation
— Swap problem may require and extra register
— Must run a post-allocation coalescing phase Algorithms exist that do not use an interference graph They are not as powerful as the Chaitin-Briggs coalescing phase
Comp 412, Fall 2010 50
Loop-carried value cannot spill before the loop, since its name is only live inside the loop and after the loop.
Loop-carried value cannot spill before the loop, since its name is only live inside the loop and after the loop.
Hybrid Approach ?
How can the compiler attain both speed and precision?
Observation: lots of procedures are small & do not spill
Observation: some procedures are hard to allocate
Possible solution:
• Try different algorithms
• First, try linear scan— It is cheap and it may work
• If linear scan fails, try heavyweight allocator of choice— Might be Chaitin-Briggs, SSA, or some other algorithm
— Use expensive allocator only when cheap one spills
This approach would not help with the speed of a complex compilation, but it might compensate on simple compilations
Comp 412, Fall 2010 51
Comp 412, Fall 2010 52
An Even Stronger Global Allocator
Hierarchical Register Allocation (Koblenz & Callahan)
• Analyze control-flow graph to find hierarchy of tiles • Perform allocation on individual tiles, innermost to
outermost• Use summary of tile to allocate surrounding tile
• Insert compensation code at tile boundaries (LRxLRy)
• Anecdotes suggest it is fairly effective
• Target machine is multi-threaded multiprocessor (Tera MTA)
Strengths Decisions are largely local Use specialized methods
on individual tiles Allocator runs in parallel
Strengths Decisions are largely local Use specialized methods
on individual tiles Allocator runs in parallel
Weaknesses Decisions are made on
local information May insert too many
copies
Still, a promising idea
Weaknesses Decisions are made on
local information May insert too many
copies
Still, a promising idea
Eckhardt’s MS (Rice, 2005) shows that K&C produces better allocations than C&B, but is much slower
Eckhardt’s MS (Rice, 2005) shows that K&C produces better allocations than C&B, but is much slower

Comp 412, Fall 2010 53
Regional Approaches to Allocation
Probabilistic Register Allocation (Proebsting & Fischer)• Attempt to generalize from Best’s algorithm (bottom-up,
local )• Generalizes “furthest next use” to a probability• Perform an initial local allocation using estimated
probabilities• Follow this with a global phase
— Compute a merit score for each LR as (benefit from x in a register = probability it stays in a register)
— Allocate registers to LRs in priority order, by merit score, working from inner loops to outer loops
— Use coloring to perform assignment among allocated LRs
• Little direct experience (either anecdotal or experimental) • Combines top-down global with bottom-up local
This idea predated Linear Scan and tried to achieve many of the same benefits.
This idea predated Linear Scan and tried to achieve many of the same benefits.

Comp 412, Fall 2010 54
Regional Approaches to Allocation
Register Allocation via Fusion (Lueh, Adl-Tabatabi, Gross)• Use regional information to drive global allocation• Partition CFGs into regions & build interference graphs• Ensure that each region is k-colorable• Merge regions by fusing them along CFG edges
— Maintain k-colorability by splitting along fused edge— Fuse in priority order computed during the graph partition
• Assign registers using interference graphs
Strengths
• Flexibility
• Fusion operator splits on low-frequency edges
Strengths
• Flexibility
• Fusion operator splits on low-frequency edges
Weaknesses
• Choice of regions is critical • Breaks down many values
are live across region boundaries
Weaknesses
• Choice of regions is critical • Breaks down many values
are live across region boundaries
Comp 412, Fall 2010 55
Extra Slides Start Here
Comp 412, Fall 2010 56
SSA Name Space
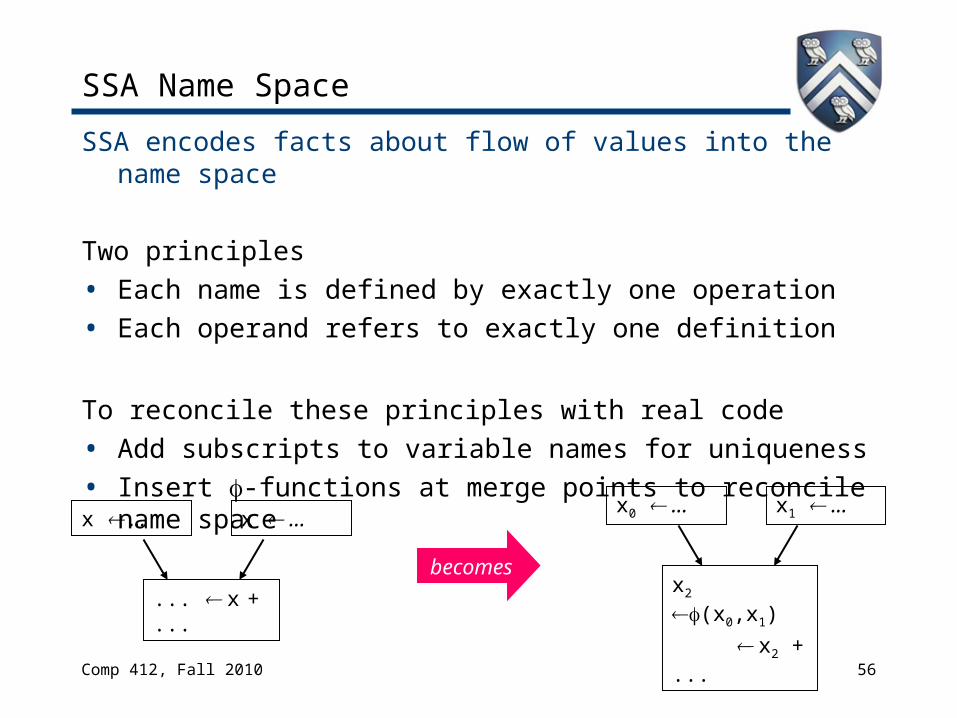
SSA encodes facts about flow of values into the name space
Two principles• Each name is defined by exactly one operation• Each operand refers to exactly one definition
To reconcile these principles with real code• Add subscripts to variable names for uniqueness• Insert -functions at merge points to reconcile name
spacex ... x ...
... x + ...
x0 ... x1 ...
x2 (x0,x1)
x2 + ...
becomes
Comp 412, Fall 2010 57
SSA Name Space
These -functions are unusual constructs …• A -function only occurs at the start of a block • A -function has one argument for each CFG edge
entering the block• A -function returns the argument that corresponds to
the edge along which control flow entered the block— All -functions in the block execute concurrently— Since machines do not support -functions, must translate
back out of SSA form before we produce executable code
• All -functions in a block execute concurrently— All read their argument, all perform assignment in parallel
• Using SSA form leads to simpler or better formulations of many optimizations (alternative to global data-flow analysis )
Comp 412, Fall 2010 58
Building SSA
SSA Form• Each name is defined exactly once• Each use refers to exactly one name
What’s Hard?• Straight-line code is easy• Split points are easy• Merge points are hard
(Sloppy) Construction Algorithm• Insert a -function for each variable at each merge point• Rename all values for uniqueness (using subscripts )
This approach Inserts too many -
functions Inserts -functions in
too many placesThe rest, however, is
optimization & beyond the scope of today’s lecture. (See §9 in EaC)
This approach Inserts too many -
functions Inserts -functions in
too many placesThe rest, however, is
optimization & beyond the scope of today’s lecture. (See §9 in EaC)
BackBack

Slides on Rematerialization
Cannot be taught without Wegman-Zadeck Sparse Simple Constant
Propagation.
Comp 412, Fall 2010 59
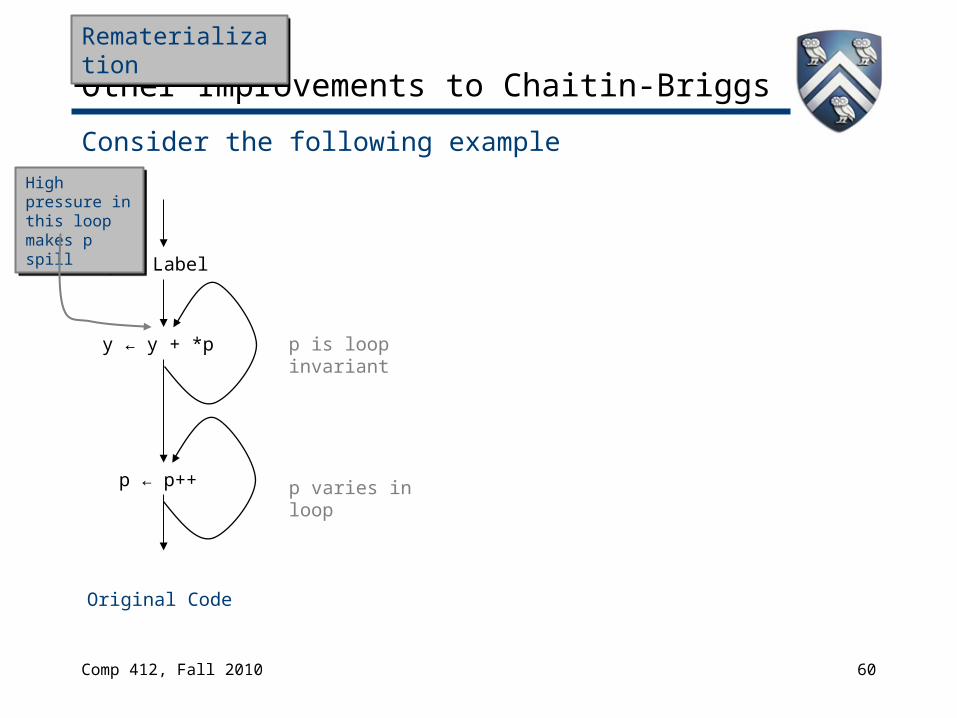
Other Improvements to Chaitin-Briggs
Consider the following example
Comp 412, Fall 2010 60
p varies in loop
p is loop invariant
p ← Label
y ← y + *p
p ← p++
Original Code
High pressure in this loop makes p spill
High pressure in this loop makes p spill
RematerializationRematerialization