full waveform inversion (fwi) with wave-equation · pdf filefull waveform inversion (()fwi)...
TRANSCRIPT

Full Waveform Inversion (FWI) ( )with wave-equation migration
(WEM) and well control(WEM) and well controlGary Margravey gRob FergusonChad Hogang
Banff, 3 Dec. 2010

OutlineOutline
The FWI cycleThe FWI cycleThe fundamental theorem of FWI
Understanding the theoremUnderstanding the theoremWhat kind of migration?Calibrating the migrationCalibrating the migration
A numerical experiment with MarmousiConclusionsConclusions

Initial impressions of FWIInitial impressions of FWI
??

Second impression of FWISecond impression of FWI
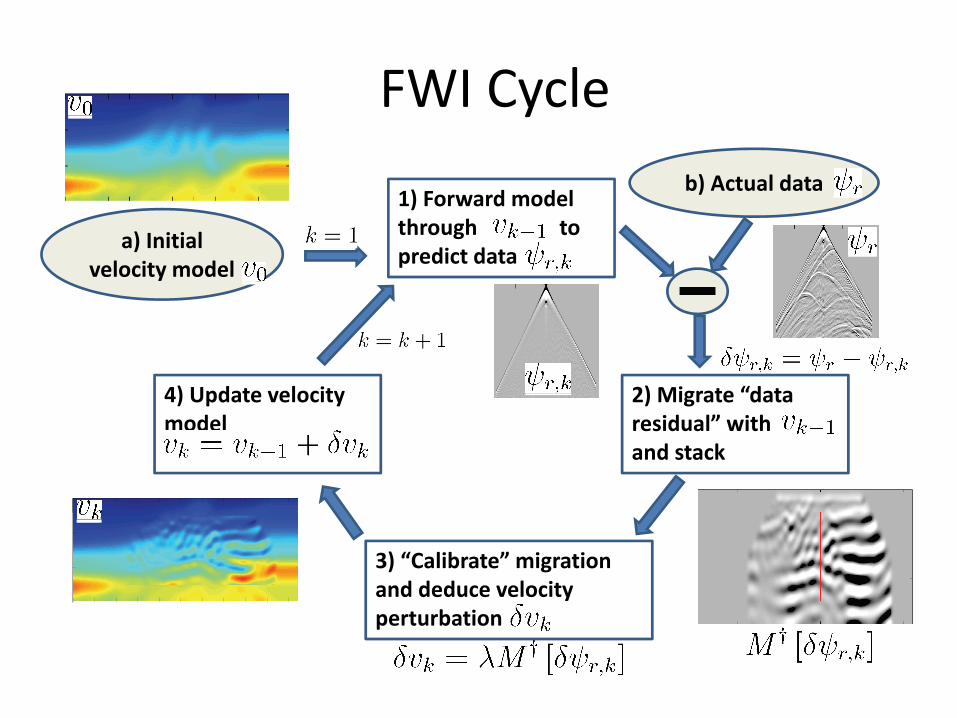
FWI CycleFWI Cycle
1) Forward modelb) Actual data
1) Forward model through to predict data
a) Initial velocity model
2) Migrate “data 4) Update velocity
residual” with and stack
model
3) “Calibrate” migration and deduce velocity perturbationperturbation

Fundamental Theorem of FWIFundamental Theorem of FWITheorem (Tarantola, Lailly): Given real acoustic data and
i t l it d l th li i d l itan approximate velocity model, then a linearized velocity model update, , is given by
A prestack migrationa scalar to be determined (“step length”)
monochromatic, forward propagatedmonochromatic, forward propagated (downward continued), shot model
monochromatic, reverse propagatedmonochromatic, reverse propagated (downward continued), data residual

Understanding the FTFWIUnderstanding the FTFWIInterpretation: A prestack migration of the data residual is
ti l t th d i d d t t th l it d lproportional to the desired update to the velocity model.
This is because the gradient of the data misfit function can be shown to be a type of prestack migration.
A l ti i i diti i t ll dA cross correlation imaging condition arises naturally and there is a frequency squared factor. In the time domain this is a type of reverse –time migration (RTM).
Frequency domain TIme domainFrequency domain TIme domain

Understanding the FTFWIUnderstanding the FTFWIFrequency dependence of :
FTFWI th t th l t i k• FTFWI assumes that the source wavelet is known.• An unknown wavelet is equivalent to a complex-valued (i.e. amplitude and phase), frequency-dependent scalar.
So we write
where the factor has been absorbed into

What kind of migration?What kind of migration?• The direct interpretation of the FTFWI requires a prestackreverse-time migration (RTM) using time-differentiatedreverse time migration (RTM) using time differentiated wavefields.• However, experience suggests that all depth migrations can produce comparable resultscan produce comparable results.•With allowed to be complex and frequency-dependent, there seems no reason that a depth-stepping wave-equation migration (WEM) should not be used.
where is a generalized migration operator and we expect that depends on both the source wavelet and the type of migration.
Calibrating the migrationCalibrating the migration
FTFWI Fi d th l h th tFTFWI: Find the scalar such that
produces the best forward modelled data.
Standard practice finds in a 1D search called a “line search”.

Calibrating the migrationCalibrating the migrationThis paper: Find the scalar such that
Defining the velocity residual
where is the well location at which is known.
Defining the velocity residual
So we will match the migrated data residual to the velocity residual at the well. This is a process very similar to standard impedance inversionimpedance inversion.

Calibrating the migrationCalibrating the migrationOur explicit calibration procedure is:
1. Convolve the migrated stack with a Gaussian smoother2. Determine the best (least squares) scalar to match the
smoothed migrated trace at the well to the residualsmoothed migrated trace at the well to the residual velocity at the well.
3. Determine the best (least squares) constant-phase rotation t t h th l d th d i t d t t thto match the scaled, smoothed, migrated trace to the residual velocity at the well.
4. Apply the amplitude scalar and phase rotation to the entire smoothed stack to estimate .
Many other, more sophisticated calibration methods are possible.

Numerical ExperimentNumerical ExperimentUsing data created from the Marmousi model, we implemented the four steps of FWI as:implemented the four steps of FWI as:
1. Modelling using acoustic finite difference tools in l bMatlab.
2. Migration of data residual using PSPI in Matlab.3. Calibration by matching to data residual to velocity y g y
residual at well using least-squares amplitude and constant-phase rotations.
4 Update using addition4. Update using addition.

Marmousi Modelwith shots (red) receivers (white) and well (black)with shots (red), receivers (white), and well (black)
40 h li d f ff 200040 shots, split spread, far offset 2000 m.

ModellingSpectrum of source wavelet
(5 Hz dominant)Spectrum of modelled
datadata
a) b)

Sample ShotsSample Shots0
Shot 1 Shot 20 Shot 40
1.0
Seco
nds
2.0
S
6000 80004000Meters
8000 100006000Meters
4000 60002000Meters Meters MetersMeters

Initial Velocity ModelGaussian smoother 580m width
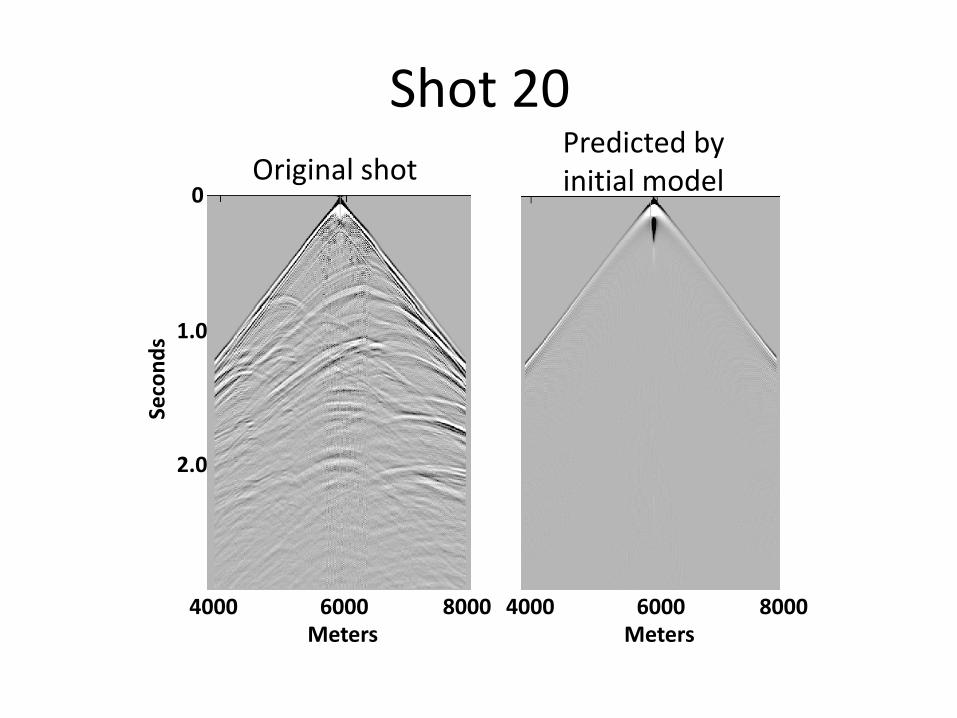
Shot 20Shot 20Original shot
0
Predicted by initial model
1.0
Seco
nds
2.0
S
4000 6000 8000 4000 6000 8000Meters Meters

First Migration (0-5 Hz) with and without modellingn
Migration of full data Migration of data residual
nvol
utio
n g
cond
ition
Deco
nIm
agin
gat
ion
ditio
nro
ss C
orre
lam
agin
g co
ndCr Im

Calibration at the wellFirst iteration 0 5 HzFirst iteration 0-5 Hz.
Migration Before update After update
Extent of well.
Blue is the exact velocity at the well. Red is the migration velocity.

0After 1 Iteration 0-5 Hz
b)
0
1000
met
ers 5000 m/s
4000 m/s
05000 m/s
2000m 3000 m/s
2000 m/s
b)1000
2000met
ers 5000 m/s
4000 m/s
3000 m/s2000 3000 m/s
2000 m/s0
s 5000 m/s
b)1000
2000met
ers
4000 m/s
3000 m/s
2000 4000 6000 8000meters
2000 m/s

Frequency IterationIteration 1, 1-4 Hz Iteration 2, 5-6 Hz Iteration 3, 5-10 Hz
Iteration 5, 10-20 Hz Iteration 11, 25-35 Hz Iteration 22, 55-60 Hz
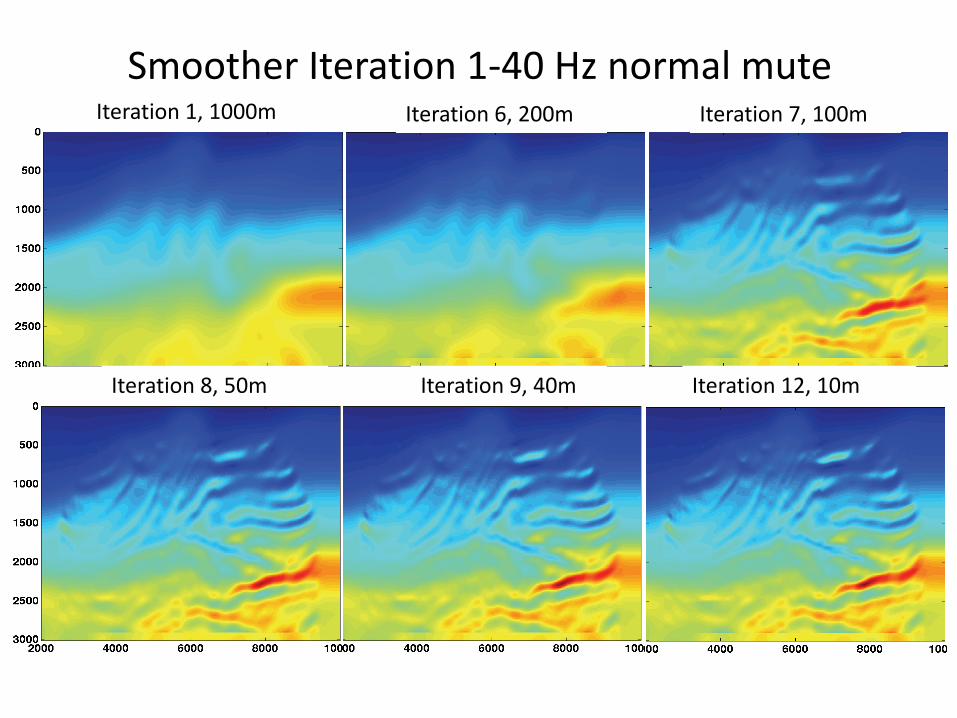
Smoother Iteration 1-40 Hz normal muteIteration 1, 1000m Iteration 6, 200m Iteration 7, 100m
Iteration 8, 50m Iteration 9, 40m Iteration 12, 10m

Data Residual L2 Norms
2 no
rmsid
ual L
2Da
ta re
s
0 5 10 15 20Iteration

Common Image Gather
h3
h1 h2
h3
h1 h2

Smoother Iteration 1-40 Hz wide muteIteration 1, 1000m Iteration 6, 200m Iteration 7, 100m
Iteration 9, 40m Iteration 12, 10mIteration 8, 50m

Smoother Iteration 1-40 Hz harsh muteIteration 1, 1000m Iteration 6, 200m Iteration 7, 100m
Iteration 9, 40m Iteration 12, 10mIteration 8, 50m
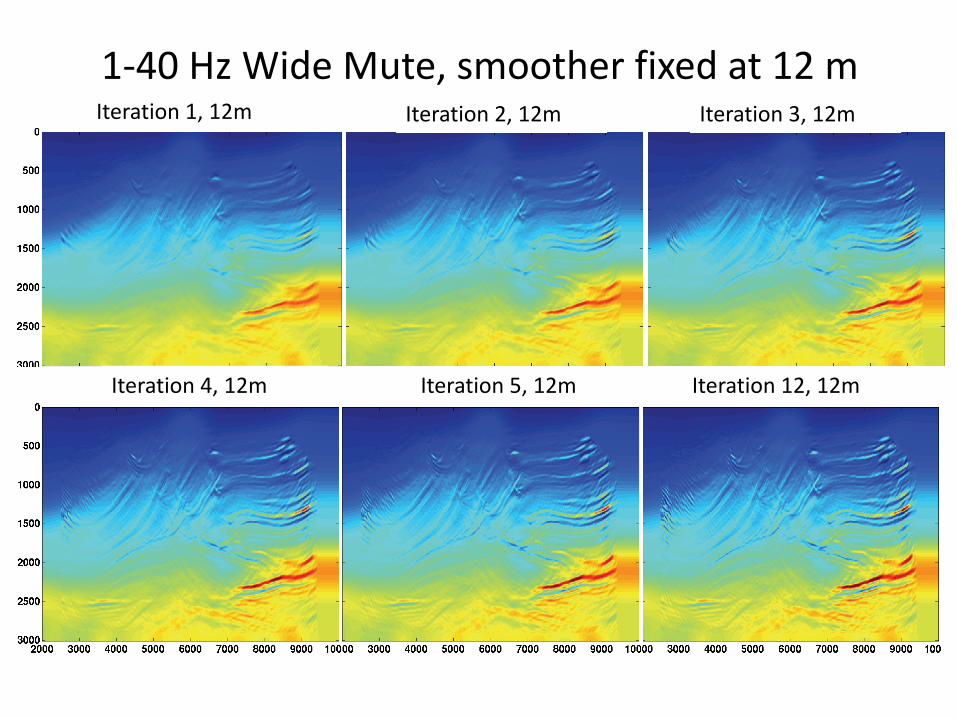
1-40 Hz Wide Mute, smoother fixed at 12 mIteration 1, 12m Iteration 2, 12m Iteration 3, 12m
Iteration 4, 12m Iteration 5, 12m Iteration 12, 12m

Data Residual L2 Norms
2 no
rmsid
ual L
2Da
ta re
s
0 5 10 15 20Iteration

Shot 20Shot 20Original shot
0
Predicted on third iteration
1.0
Seco
nds
2.0
S
4000 6000 8000 4000 6000 8000Meters Meters

Shot 20Shot 20Original shot
0
Predicted by initial model
1.0
Seco
nds
2.0
S
4000 6000 8000 4000 6000 8000Meters Meters
ConclusionsConclusionsThe FTFWI suggests a generalized inversion scheme
with many possible variationswith many possible variations.FWI is an iterative modelling, migration, and
calibration process.pFWI can be done with migration algorithms other
than RTM.Calibration generally involves a wavelet estimation
and scaling, and is reminiscent of impedance inversioninversion.
The process demonstrated here is not claimed to be optimal but is suggestive of many other variantsoptimal, but is suggestive of many other variants.

AcknowledgementsAcknowledgements
W th k i d t f th iWe thank our industry sponsors for their generous support which makes our work possible. We
thank Hussain Hammad for his thesis and discussions.
Calibrating the migrationCalibrating the migration
FTFWI Fi d th l h th tFTFWI: Find the scalar such that
produces the best forward modelled data.
Thi Fi d th l h th tThis paper: Find the scalar such that
where is the well location at which is known.
Calibrating the migrationCalibrating the migrationMatching condition at the well
S b tit ti fSubstituting for
Defining the velocity residual
So we will match the migrated data residual to the velocity residual at the well This is a process very similar to standardresidual at the well. This is a process very similar to standard impedance inversion.

WeirdWeird