formulario tratamiento digital de la señal
DESCRIPTION
Formulario para Tratamiento Digital de la SeñalTRANSCRIPT
DTFT
X(ej!) =+!!
n="!x[n]e"jn! x[n] =
12!
" "
""X(ej!)ej!nd"
+!!
n="!x1[n]x#
2[n] =12!
" "
""X1(ej!)X#
2 (ej!)d"
Im[x[n]] = 0!" X(e"j!) = X#(ej!)
x[#n] = x#[n]!" Im[X(ej!)] = 0
Re[x[n]] = 0!" X(e"j!) = #X#(ej!)
x[#n] = #x#[n]!" Re[X(ej!)] = 0
Funci on Transformadaa1x[n] + a2y[n] a1X(ej!) + a2Y (ej!)(x $ y)[n] X(ej!)Y (ej!)x[n]y[n] 1
2"
# """ X(ej#)Y (ej(!"#))d#
x#[n] X#(e"j!)x[n# no] X(ej!)e"jno!
x[n]ejn!o X(ej(!"!o))n x[n] j d X(ej!)
d!
x[#n] X(e"j!)$[n] 1$[n# no] e"jno!
1$+!
k="! 2!$(" + 2!k)anu[n] (|a| < 1) 1
1"ae!j!
u[n] 11"e!j! +
$!k="! !$(" + 2!k)
(n + 1)anu[n] (|a| < 1) 1(1"ae!j!)2
rn sin !o(n+1)sin !o
u[n] (|r| < 1) 11"2r cos !oe!j!+r2e!j2!
sin !on"n
$k !
%!+2"k
2!o
&
x[n] ='
1 0 % n %M0 otro n
sin(!(M+1)/2)sin(!/2) e"j!M/2
ej!on$!
k="! 2!$(" # "o + 2!k)
F ormula de Poisson+!!
k="!ejk$t =
2!
%
+!!
k="!$
(t# k
2!
%
)
Desigualdad de Schwarz*****
" b
av(#)w#(#)d#
*****
2
%" b
a|v(#)|2d#
" b
a|w(#)|2d#
La igualdad se da si v(#) = K · w(#) con K constante.
Transformada Z unilateral
X(z) =+!!
n=0
x[n]z"n
x[n]&' Xu(z)
x[n + no]&' znoXu(z)# x[0]zno # · · ·# x[no # 1]z
x[n# no]&' z"noXu(z) + x[#1]z"no+1 + · · · + x[#no]
F ormula 1
ej" + 1 = 0
DFT
X [k] =N"1!
n=0
x[n]W knN x[n] =
1N
N"1!
k=0
X [k]W"knN
donde WN = e"j2"/N
N"1!
n=0
x[n]y#[n] =1N
N"1!
k=0
X [k]Y #[k]
Im[x[n]] = 0!" X [#n mod N ] = X#[k]x[#n mod N ] = x#[n]!" Im[X [k]] = 0
Re[x[n]] = 0!" X [#n mod N ] = #X#[k]x[#n mod N ] = #x#[n]!" Re[X [k]] = 0
Funci on Transformadaax[n] + by[n] aX [k] + bY [k]X [n] Nx[#k mod N ]x[(n#m) mod N ] W km
N X [k]W"ln
N x[n] X [(k # l) mod N ]$N"1m=0 x[m]y[(n#m) mod N ] X [k]Y [k]
x[n]y[n] 1N
$N"1l=0 X [l]Y [(k # l) mod N ]
x#[n] X#[#k mod N ]x#[#n mod N ] X#[k]
Transformada Z
X(z) =+!!
n="!x[n]z"n x(n) =
12!j
+
CX(z)zn"1dz
donde C es una curva antihoraria en la regi on de convergencia yque envuelve al origen.
Secuencia Transformada Z ROC
ax[n] + by[n] aX(z) + bY (z) contiene Rx (Ry
x[n# no] z"noX(z) Rx, quiz a ± 0 o)zn
o x[n] X(z/zo) |zo|Rx
nkx[n],#z d
dz
-kX(z) Rx, quiz a ± 0 o)
x#[n] X#(z#) Rx
x[#n] X(1/z) 1/Rx
(x $ y)[n] X(z)Y (z) contiene Rx (Ry
$[n] 1 *zanu[n] 1
1"az!1 |z| > |a|#anu[#n# 1] 1
1"az!1 |z| < |a|$[n# no] z"no *z excepto 0 o)cos(&on)u[n] 1"z!1 cos %o
1"2z!1 cos %o+z!2 |z| > 1sin(&on)u[n] z!1 sin %o
1"2z!1 cos %o+z!2 |z| > 1
Serie Geom etricaN2!
k=N1
%k =%N1 # %N2+1
1# %si N2 > N1 y % += 1
Hoja de f ormulas MPD/SISCOM ver 2.8 c! 2003 INSTITUTO DE INGENIER IA EL ECTRICA
Formulario TDSFormulario
Procesamiento Digital de Senales
MX
n=0
↵n =1� ↵M+1
1� ↵(1)
1X
n=0
↵n =1
1� ↵, |a| < 1 (2)
sen(A ± B) = sen(A) cos(B) ± cos(A) sen(B) (3)
cos(A ± B) = cos(A) cos(B)⌥ sen(A) sen(B) (4)
cos2(A) =1
2(1 + cos(2A)) (5)
sen2(A) =1
2(1� cos(2A)) (6)
sen(A) sen(B) =1
2(cos(A�B)� cos(A + B)) (7)
cos(A) cos(B) =1
2(cos(A�B) + cos(A + B)) (8)
sen(A) cos(B) =1
2(sen(A�B) + sen(A + B)) (9)
sen
✓A
2
◆=
r1
2(1� cos(A)) (10)
cos
✓A
2
◆=
r1
2(1 + cos(A)) (11)
ej! = cos(!) + j sen(!) (12)
cos(!) =ej! + e�j!
2(13)
sen(!) =ej! � e�j!
2j(14)
1
Formulario
Procesamiento Digital de Senales
MX
n=0
↵n =1� ↵M+1
1� ↵(1)
1X
n=0
↵n =1
1� ↵, |a| < 1 (2)
sen(A ± B) = sen(A) cos(B) ± cos(A) sen(B) (3)
cos(A ± B) = cos(A) cos(B)⌥ sen(A) sen(B) (4)
cos2(A) =1
2(1 + cos(2A)) (5)
sen2(A) =1
2(1� cos(2A)) (6)
sen(A) sen(B) =1
2(cos(A�B)� cos(A + B)) (7)
cos(A) cos(B) =1
2(cos(A�B) + cos(A + B)) (8)
sen(A) cos(B) =1
2(sen(A�B) + sen(A + B)) (9)
sen
✓A
2
◆=
r1
2(1� cos(A)) (10)
cos
✓A
2
◆=
r1
2(1 + cos(A)) (11)
ej! = cos(!) + j sen(!) (12)
cos(!) =ej! + e�j!
2(13)
sen(!) =ej! � e�j!
2j(14)
1
Serie de Fourierx(t) funci on peri odica, con per ıodo T
X [k] =1T
! to+T
to
x(t)e!jk 2!T tdt x(t) =
+""
k=!"X [k]ejk 2!
T t
para cualquier to.
1T
! to+T
to
x(t)y#(t)dt =""
k=!"X [k]Y #[k]
Im[x(t)] = 0!" X [#k] = X#[k]
x(#t) = x#(t)!" Im[X [k]] = 0
Re[x(t)] = 0!" X [#k] = #X#[k]
x(#t) = #x#(t)!" Re[X [k]] = 0
Funci on Transformadaax(t) + by(t) aX [k] + bY [k]f(t# !) e!j2!k"/T X [k]ej2!mt/T x(t) X [k #m]1T
# T0 x(t# !)y(!)d! X [k]Y [k]
x(t)y(t) X [k] $ Y [k]$n !
%t!nT
"
&"T sinc(k!/T )
Identidades trigonom etricasej# = cos " + j sin "
cos " = ej"+e!j"
2
sin " = ej"!e!j"
2j
cos " = sin(" + 90$)sin " = cos(" # 90$)sin2 " + cos2 " = 1cos2 " = 1/2(1 + cos 2")cos3 " = 1/4(3 cos" + cos 3")sin2 " = 1/2(1# cos 2")sin3 " = 1/4(3 sin " # sin 3")sin(# ± $) = sin # cos$ ± cos# sin $cos(# ± $) = cos# cos$ % sin# sin$
tan(# ± $) = tan $±tan %1%tan $ tan %
sin # sin $ = 1/2 cos(## $)# 1/2 cos(# + $)cos# cos$ = 1/2 cos(## $) + 1/2 cos(# + $)sin # cos$ = 1/2 sin(## $) + 1/2 sin(# + $)
Algunas funciones utiles
p(x) =1&
2%&2e!
(x!m)2
2#2 Distribuci on de Gauss
Q(k) =1&2%
! "
ke!&2/2d' Cola Gaussiana
sinc t =sin %t
%tSinc
sign t ='
1 t > 0#1 t < 0
Signo
u(t) ='
1 t > 00 t < 0
Escal on
!%
t"
&=
'1 |t| < "
2
0 |t| > "2
Rect angulo
"%
t"
&=
(1# |t|
" |t| < !0 |t| > !
Tri angulo
Transformada de Fourier
X(f) =! "
!"x(t)e!j2!ftdt x(t) =
! "
!"X(f)ej2!ftdf
! "
!"x(t)y#(t)dt =
! "
!"X(f)Y #(f)df
Im[x(t)] = 0!" X(f) = X#(f)
x(#t) = x#(t)!" Im[X(f)] = 0
Re[x(t)] = 0!" X(#f) = #X#(f)
x(#t) = #x#(t)!" Re[X(f)] = 0
Funci on Transformadaax(t) + by(t) aX(f) + bY (f)(x $ y)(t) X(f)Y (f)x(t)y(t) (X $ Y )(f)x#(t) X#(#f)X(t) x(#f)x(t# td) X(f)e!j2!ftd
x(t)ej'ct X(f # fc)x(t) cos((ct + )) X(f!fc)e
j$+X(f+fc)e!j$
2
x(#t) 1|$|X
)f$
*
dnx(t)dtn (j2%f)nX(f)# t!" x(')d' 1
j2!f X(f) + X(0)2 *(f)
tnx(t) (#j2%)!n dnX(f)dfn
*(t# td) e!j2!ftd
ej('ct+() ej(*(f # fc)e!!(at)2 1
ae!!(f/a)2
$"k=!" *(t# kT ) 1
T
$"k=!" *
%f # k
T
&
sign t 1j!f
u(t) 1j2!f + 1
2*(f)!
%t"
&! sinc f!
"%
t"
&! sinc2 f!
Cola Gaussiana
Cuando k > 3 la siguiente es una buena aproximaci on
Q(k) ' 1&2%k
e!k2/2
Hoja de f ormulas MPD/SISCOM ver 2.8 c! 2003 INSTITUTO DE INGENIER IA EL ECTRICA
DTFT
X(ej!) =+!!
n="!x[n]e"jn! x[n] =
12!
" "
""X(ej!)ej!nd"
+!!
n="!x1[n]x#
2[n] =12!
" "
""X1(ej!)X#
2 (ej!)d"
Im[x[n]] = 0!" X(e"j!) = X#(ej!)
x[#n] = x#[n]!" Im[X(ej!)] = 0
Re[x[n]] = 0!" X(e"j!) = #X#(ej!)
x[#n] = #x#[n]!" Re[X(ej!)] = 0
Funci on Transformadaa1x[n] + a2y[n] a1X(ej!) + a2Y (ej!)(x $ y)[n] X(ej!)Y (ej!)x[n]y[n] 1
2"
# """ X(ej#)Y (ej(!"#))d#
x#[n] X#(e"j!)x[n# no] X(ej!)e"jno!
x[n]ejn!o X(ej(!"!o))n x[n] j d X(ej!)
d!
x[#n] X(e"j!)$[n] 1$[n# no] e"jno!
1$+!
k="! 2!$(" + 2!k)anu[n] (|a| < 1) 1
1"ae!j!
u[n] 11"e!j! +
$!k="! !$(" + 2!k)
(n + 1)anu[n] (|a| < 1) 1(1"ae!j!)2
rn sin !o(n+1)sin !o
u[n] (|r| < 1) 11"2r cos !oe!j!+r2e!j2!
sin !on"n
$k !
%!+2"k
2!o
&
x[n] ='
1 0 % n %M0 otro n
sin(!(M+1)/2)sin(!/2) e"j!M/2
ej!on$!
k="! 2!$(" # "o + 2!k)
F ormula de Poisson+!!
k="!ejk$t =
2!
%
+!!
k="!$
(t# k
2!
%
)
Desigualdad de Schwarz*****
" b
av(#)w#(#)d#
*****
2
%" b
a|v(#)|2d#
" b
a|w(#)|2d#
La igualdad se da si v(#) = K · w(#) con K constante.
Transformada Z unilateral
X(z) =+!!
n=0
x[n]z"n
x[n]&' Xu(z)
x[n + no]&' znoXu(z)# x[0]zno # · · ·# x[no # 1]z
x[n# no]&' z"noXu(z) + x[#1]z"no+1 + · · · + x[#no]
F ormula 1
ej" + 1 = 0
DFT
X [k] =N"1!
n=0
x[n]W knN x[n] =
1N
N"1!
k=0
X [k]W"knN
donde WN = e"j2"/N
N"1!
n=0
x[n]y#[n] =1N
N"1!
k=0
X [k]Y #[k]
Im[x[n]] = 0!" X [#n mod N ] = X#[k]x[#n mod N ] = x#[n]!" Im[X [k]] = 0
Re[x[n]] = 0!" X [#n mod N ] = #X#[k]x[#n mod N ] = #x#[n]!" Re[X [k]] = 0
Funci on Transformadaax[n] + by[n] aX [k] + bY [k]X [n] Nx[#k mod N ]x[(n#m) mod N ] W km
N X [k]W"ln
N x[n] X [(k # l) mod N ]$N"1m=0 x[m]y[(n#m) mod N ] X [k]Y [k]
x[n]y[n] 1N
$N"1l=0 X [l]Y [(k # l) mod N ]
x#[n] X#[#k mod N ]x#[#n mod N ] X#[k]
Transformada Z
X(z) =+!!
n="!x[n]z"n x(n) =
12!j
+
CX(z)zn"1dz
donde C es una curva antihoraria en la regi on de convergencia yque envuelve al origen.
Secuencia Transformada Z ROC
ax[n] + by[n] aX(z) + bY (z) contiene Rx (Ry
x[n# no] z"noX(z) Rx, quiz a ± 0 o)zn
o x[n] X(z/zo) |zo|Rx
nkx[n],#z d
dz
-kX(z) Rx, quiz a ± 0 o)
x#[n] X#(z#) Rx
x[#n] X(1/z) 1/Rx
(x $ y)[n] X(z)Y (z) contiene Rx (Ry
$[n] 1 *zanu[n] 1
1"az!1 |z| > |a|#anu[#n# 1] 1
1"az!1 |z| < |a|$[n# no] z"no *z excepto 0 o)cos(&on)u[n] 1"z!1 cos %o
1"2z!1 cos %o+z!2 |z| > 1sin(&on)u[n] z!1 sin %o
1"2z!1 cos %o+z!2 |z| > 1
Serie Geom etricaN2!
k=N1
%k =%N1 # %N2+1
1# %si N2 > N1 y % += 1
Hoja de f ormulas MPD/SISCOM ver 2.8 c! 2003 INSTITUTO DE INGENIER IA EL ECTRICA
Cuadro 1: Transformada z de algunas funciones comunes
Senal x(n) Transformada z, X(z) ROC
�(n) 1 Plano z
u(n)1
1� z�1
|z| > 1
anu(n)1
1� az�1
|z| > |a|
nanu(n)az�1
(1� az�1)2
|z| > |a|
�(an)u(�n� 1)1
1� az�1
|z| < |a|
�n(an)u(�n� 1)az�1
(1� az�1)2
|z| < |a|
cos(!0
n)u(n)1� z�1 cos !
0
1� 2z�1 cos !0
+ z�2
|z| > 1
sen(!0
n)u(n)z�1 sen !
0
1� 2z�1 cos !0
+ z�2
|z| > 1
an cos(!0
n)u(n)1� az�1 cos !
0
1� 2az�1 cos !0
+ a2z�2
|z| > |a|
an sen(!0
n)u(n)az�1 sen !
0
1� 2az�1 cos !0
+ a2z�2
|z| > |a|
2
DTFT
X(ej!) =+!!
n="!x[n]e"jn! x[n] =
12!
" "
""X(ej!)ej!nd"
+!!
n="!x1[n]x#
2[n] =12!
" "
""X1(ej!)X#
2 (ej!)d"
Im[x[n]] = 0!" X(e"j!) = X#(ej!)
x[#n] = x#[n]!" Im[X(ej!)] = 0
Re[x[n]] = 0!" X(e"j!) = #X#(ej!)
x[#n] = #x#[n]!" Re[X(ej!)] = 0
Funci on Transformadaa1x[n] + a2y[n] a1X(ej!) + a2Y (ej!)(x $ y)[n] X(ej!)Y (ej!)x[n]y[n] 1
2"
# """ X(ej#)Y (ej(!"#))d#
x#[n] X#(e"j!)x[n# no] X(ej!)e"jno!
x[n]ejn!o X(ej(!"!o))n x[n] j d X(ej!)
d!
x[#n] X(e"j!)$[n] 1$[n# no] e"jno!
1$+!
k="! 2!$(" + 2!k)anu[n] (|a| < 1) 1
1"ae!j!
u[n] 11"e!j! +
$!k="! !$(" + 2!k)
(n + 1)anu[n] (|a| < 1) 1(1"ae!j!)2
rn sin !o(n+1)sin !o
u[n] (|r| < 1) 11"2r cos !oe!j!+r2e!j2!
sin !on"n
$k !
%!+2"k
2!o
&
x[n] ='
1 0 % n %M0 otro n
sin(!(M+1)/2)sin(!/2) e"j!M/2
ej!on$!
k="! 2!$(" # "o + 2!k)
F ormula de Poisson+!!
k="!ejk$t =
2!
%
+!!
k="!$
(t# k
2!
%
)
Desigualdad de Schwarz*****
" b
av(#)w#(#)d#
*****
2
%" b
a|v(#)|2d#
" b
a|w(#)|2d#
La igualdad se da si v(#) = K · w(#) con K constante.
Transformada Z unilateral
X(z) =+!!
n=0
x[n]z"n
x[n]&' Xu(z)
x[n + no]&' znoXu(z)# x[0]zno # · · ·# x[no # 1]z
x[n# no]&' z"noXu(z) + x[#1]z"no+1 + · · · + x[#no]
F ormula 1
ej" + 1 = 0
DFT
X [k] =N"1!
n=0
x[n]W knN x[n] =
1N
N"1!
k=0
X [k]W"knN
donde WN = e"j2"/N
N"1!
n=0
x[n]y#[n] =1N
N"1!
k=0
X [k]Y #[k]
Im[x[n]] = 0!" X [#n mod N ] = X#[k]x[#n mod N ] = x#[n]!" Im[X [k]] = 0
Re[x[n]] = 0!" X [#n mod N ] = #X#[k]x[#n mod N ] = #x#[n]!" Re[X [k]] = 0
Funci on Transformadaax[n] + by[n] aX [k] + bY [k]X [n] Nx[#k mod N ]x[(n#m) mod N ] W km
N X [k]W"ln
N x[n] X [(k # l) mod N ]$N"1m=0 x[m]y[(n#m) mod N ] X [k]Y [k]
x[n]y[n] 1N
$N"1l=0 X [l]Y [(k # l) mod N ]
x#[n] X#[#k mod N ]x#[#n mod N ] X#[k]
Transformada Z
X(z) =+!!
n="!x[n]z"n x(n) =
12!j
+
CX(z)zn"1dz
donde C es una curva antihoraria en la regi on de convergencia yque envuelve al origen.
Secuencia Transformada Z ROC
ax[n] + by[n] aX(z) + bY (z) contiene Rx (Ry
x[n# no] z"noX(z) Rx, quiz a ± 0 o)zn
o x[n] X(z/zo) |zo|Rx
nkx[n],#z d
dz
-kX(z) Rx, quiz a ± 0 o)
x#[n] X#(z#) Rx
x[#n] X(1/z) 1/Rx
(x $ y)[n] X(z)Y (z) contiene Rx (Ry
$[n] 1 *zanu[n] 1
1"az!1 |z| > |a|#anu[#n# 1] 1
1"az!1 |z| < |a|$[n# no] z"no *z excepto 0 o)cos(&on)u[n] 1"z!1 cos %o
1"2z!1 cos %o+z!2 |z| > 1sin(&on)u[n] z!1 sin %o
1"2z!1 cos %o+z!2 |z| > 1
Serie Geom etricaN2!
k=N1
%k =%N1 # %N2+1
1# %si N2 > N1 y % += 1
Hoja de f ormulas MPD/SISCOM ver 2.8 c! 2003 INSTITUTO DE INGENIER IA EL ECTRICA
1
Cuadro 2: Propiedades de la transformada z
Propiedad Dominio n Dominio z ROC
Notacion x(n) X(z) ROC: r2
< |z| < r1
x1
(n) X1
(z) ROC1
x2
(n) X2
(z) ROC2
Linealidad a1
x1
(n) + a2
x2
(n) a1
X1
(z) + a2
X2
(z) por lo menos ROC1
\ROC2
Desplazamiento en n x(n� k) z�kX(z)como la de X(z) excepto z = 0 sik > 0 y z = 1 si k < 0
Escalado en z anx(n) X(a�1z) |a|r2
< |z| < |a|r1
Reflexion en n x(�n) X(z�1)1
r1
< |z| <1
r2
Conjugacion x(n) X(z) ROC
Parte real Re{x(n)} 1
2
⇥X(z) + X(z)
⇤ Incluye ROC
Parte imaginaria Im{x(n)} 1
2
⇥X(z)�X(z)
⇤ Incluye ROC
Derivacion en z nx(n) �zdX(z)
dzr2
< |z| < r1
Convolucion x1
(n) ⇤ x2
(n) X1
(z)X2
(z) Por lo menos ROC1
\ROC2
Correlacion rx1x2(n) = x
1
(n) ⇤ x2
(�n) Rx1x2 = X
1
(z)X2
(z�1)Por lo menos la interseccion deROC
1
y la de X2
(z�1)
Teorema del valor inicial Si x(n) es causal x(0) = lımz!1
X(z)
Multiplicacion x1
(n)x2
(n)1
2⇡j
I
C
X1
(v)X2
⇣z
v
⌘v�1 dv Por lo menos r
1l
r2l
< |z| < r1u
r2u
Relacion de Parseval1X
n=�1x
1
(n)x2
(n) =1
2⇡j
I
C
X1
(v)X2
✓1
v
◆v�1 dv
3
Cuadro 3: Propiedades de la DFT
Propiedad Dominio temporal Dominio frecuencial
Notacion x(n), y(n) X(k), Y (k)Periodicidad x(n) = x(n + N) X(k) = X(k + N)Linealidad a
1
x1
(n) + a2
x2
(n) a1
X1
(k) + a2
X2
(k)Reflexion temporal x(N � n) X(N � k)Desplazamiento temporal circular x((n� l))
N
X(k) e�j2⇡kl/N
Desplazamiento frecuencial circular x(n)ej2⇡ln/N X((k � l))N
Conjugacion compleja x(n) X(N � k)Convolucion circular x
1
(n) N� x2
(n) X1
(k)X2
(k)Correlacion circular x(n) N� y(�n) X(k)Y (k)Multiplicacion de dos secuencias x
1
(n)x2
(n) 1
N
X1
(k) N�X2
(k)
Teorema de ParsevalN�1X
n=0
x(n)y(n)1
N
N�1X
k=0
X(k)Y (k)
Cuadro 4: Simetrıas en filtros FIR de fase lineal
Simetrıa Simetrica h(n) = h(M � 1� n) Antisimetrica h(n) = �h(M � 1� n)
M par Hr
(0) = 2
M2 �1X
k=0
h(k) Hr
(0) = 0
no apto como filtro paso bajos
M impar Hr
(0) = h
✓M � 1
2
◆+ 2
M�32X
k=0
h(k) Hr
(0) = Hr
(⇡) = 0
no apto como filtro paso bajos o altos
Cuadro 5: Funciones utilizadas como ventanas.
Ventana h(n), 0 n M � 1 Ancho Pico lobulolobular lateral [dB]
Rectangular 1 4⇡/M �13
Bartlett (triangular) 1�2��n� M�1
2
��M � 1
8⇡/M �27
Hamming 0,54� 0,46 cos2⇡n
M � 18⇡/M �32
Hanning1
2
✓1� cos
2⇡n
M � 1
◆8⇡/M �43
4
Cuadro 3: Propiedades de la DFT
Propiedad Dominio temporal Dominio frecuencial
Notacion x(n), y(n) X(k), Y (k)Periodicidad x(n) = x(n + N) X(k) = X(k + N)Linealidad a
1
x1
(n) + a2
x2
(n) a1
X1
(k) + a2
X2
(k)Reflexion temporal x(N � n) X(N � k)Desplazamiento temporal circular x((n� l))
N
X(k) e�j2⇡kl/N
Desplazamiento frecuencial circular x(n)ej2⇡ln/N X((k � l))N
Conjugacion compleja x(n) X(N � k)Convolucion circular x
1
(n) N� x2
(n) X1
(k)X2
(k)Correlacion circular x(n) N� y(�n) X(k)Y (k)Multiplicacion de dos secuencias x
1
(n)x2
(n) 1
N
X1
(k) N�X2
(k)
Teorema de ParsevalN�1X
n=0
x(n)y(n)1
N
N�1X
k=0
X(k)Y (k)
Cuadro 4: Simetrıas en filtros FIR de fase lineal
Simetrıa Simetrica h(n) = h(M � 1� n) Antisimetrica h(n) = �h(M � 1� n)
M par Hr
(0) = 2
M2 �1X
k=0
h(k) Hr
(0) = 0
no apto como filtro paso bajos
M impar Hr
(0) = h
✓M � 1
2
◆+ 2
M�32X
k=0
h(k) Hr
(0) = Hr
(⇡) = 0
no apto como filtro paso bajos o altos
Cuadro 5: Funciones utilizadas como ventanas.
Ventana h(n), 0 n M � 1 Ancho Pico lobulolobular lateral [dB]
Rectangular 1 4⇡/M �13
Bartlett (triangular) 1�2��n� M�1
2
��M � 1
8⇡/M �27
Hamming 0,54� 0,46 cos2⇡n
M � 18⇡/M �32
Hanning1
2
✓1� cos
2⇡n
M � 1
◆8⇡/M �43
4
Diseño por Ventanas.
Tratamiento Digital de Señales GIET Marcelino Martínez Sober
Filtros FIR. ResumenVentanas:
3.27
INGENIERÍA ELECTRÓNICA
3.4.4.- Comparación entre los distintos métodos de diseño.
MÉTODO DE LAS VENTANAS
• Históricamente, fue el primero en aparecer, los otros dos se desarrollaron en la década
de los ’70.
• No fija de manera adecuada las frecuencias críticas !p y !s ya que éstas dependen del
tipo de ventana y de la longitud seleccionada.
MUESTREO EN FRECUENCIA
• Controlamos perfectamente la anchura de la zona de transición, ya que es igual a 2"/N.
• Hay procedimientos rápidos para el cálculo de los coeficientes, bien basándose en la
FFT, bien con las ecuaciones propuestas anteriormente. Especialmente interesante si la
mayor parte de los puntos el módulo de la ganancia son cero o uno.
• Como inconveniente, se tiene un pobre control de la respuesta fuera de esos puntos y el
procedimiento puede convertirse en un esquema de prueba y error.
APROXIMACIÓN DE TCHEBYSHEV
• Permite un control total de las características del filtro en cuanto a frecuencias,
ganancias y longitud.
• No existe una forma fácil de optimizar el diseño respecto a la longitud del filtro,
aunque existen aproximaciones como la de Kaiser:
3.27
INGENIERÍA ELECTRÓNICA
3.4.4.- Comparación entre los distintos métodos de diseño.
MÉTODO DE LAS VENTANAS
• Históricamente, fue el primero en aparecer, los otros dos se desarrollaron en la década
de los ’70.
• No fija de manera adecuada las frecuencias críticas !p y !s ya que éstas dependen del
tipo de ventana y de la longitud seleccionada.
MUESTREO EN FRECUENCIA
• Controlamos perfectamente la anchura de la zona de transición, ya que es igual a 2"/N.
• Hay procedimientos rápidos para el cálculo de los coeficientes, bien basándose en la
FFT, bien con las ecuaciones propuestas anteriormente. Especialmente interesante si la
mayor parte de los puntos el módulo de la ganancia son cero o uno.
• Como inconveniente, se tiene un pobre control de la respuesta fuera de esos puntos y el
procedimiento puede convertirse en un esquema de prueba y error.
APROXIMACIÓN DE TCHEBYSHEV
• Permite un control total de las características del filtro en cuanto a frecuencias,
ganancias y longitud.
• No existe una forma fácil de optimizar el diseño respecto a la longitud del filtro,
aunque existen aproximaciones como la de Kaiser:
Muestreo en Frecuencia:
Aproximación de TChebyshev:
3.27
INGENIERÍA ELECTRÓNICA
3.4.4.- Comparación entre los distintos métodos de diseño.
MÉTODO DE LAS VENTANAS
• Históricamente, fue el primero en aparecer, los otros dos se desarrollaron en la década
de los ’70.
• No fija de manera adecuada las frecuencias críticas !p y !s ya que éstas dependen del
tipo de ventana y de la longitud seleccionada.
MUESTREO EN FRECUENCIA
• Controlamos perfectamente la anchura de la zona de transición, ya que es igual a 2"/N.
• Hay procedimientos rápidos para el cálculo de los coeficientes, bien basándose en la
FFT, bien con las ecuaciones propuestas anteriormente. Especialmente interesante si la
mayor parte de los puntos el módulo de la ganancia son cero o uno.
• Como inconveniente, se tiene un pobre control de la respuesta fuera de esos puntos y el
procedimiento puede convertirse en un esquema de prueba y error.
APROXIMACIÓN DE TCHEBYSHEV
• Permite un control total de las características del filtro en cuanto a frecuencias,
ganancias y longitud.
• No existe una forma fácil de optimizar el diseño respecto a la longitud del filtro,
aunque existen aproximaciones como la de Kaiser:
3.27
INGENIERÍA ELECTRÓNICA
3.4.4.- Comparación entre los distintos métodos de diseño.
MÉTODO DE LAS VENTANAS
• Históricamente, fue el primero en aparecer, los otros dos se desarrollaron en la década
de los ’70.
• No fija de manera adecuada las frecuencias críticas !p y !s ya que éstas dependen del
tipo de ventana y de la longitud seleccionada.
MUESTREO EN FRECUENCIA
• Controlamos perfectamente la anchura de la zona de transición, ya que es igual a 2"/N.
• Hay procedimientos rápidos para el cálculo de los coeficientes, bien basándose en la
FFT, bien con las ecuaciones propuestas anteriormente. Especialmente interesante si la
mayor parte de los puntos el módulo de la ganancia son cero o uno.
• Como inconveniente, se tiene un pobre control de la respuesta fuera de esos puntos y el
procedimiento puede convertirse en un esquema de prueba y error.
APROXIMACIÓN DE TCHEBYSHEV
• Permite un control total de las características del filtro en cuanto a frecuencias,
ganancias y longitud.
• No existe una forma fácil de optimizar el diseño respecto a la longitud del filtro,
aunque existen aproximaciones como la de Kaiser:
Estimación del Orden. Aprox. Kaiser
lunes 5 de marzo de 12
Estimación del Orden Aproximación TchebyshebFiltros Equiripple.
2

Cuadro 7: Caracterısticas de Filtros Paso Bajo Analogicos
Filtro Funcion de Transferencia Caracterısticas
Butterworth(todo-polos)
|H(⌦)|2 =1
1 + (⌦/⌦C
)2N
⌦C
: frecuencia de corte
|H(⌦)| monotona en las bandas de pasoy rechazo.
Chebyshev,Tipo I (todo-polos)
|H(⌦)|2 =1
1 + ✏2T 2
N
⇣⌦
⌦P
⌘
TN
: polinomio de Chebyshev
T0
(x) = 1
T1
(x) = x
TN+1
(x) = 2xTN
(x)� TN�1
(x)
Rizado constante en la banda de paso ycaracterıstica monotona en la banda derechazo.
Chebyshev, Ti-po II (polos yceros)
|H(⌦)|2 =1
1 + ✏2
T
2N
“⌦S⌦P
”
T
2N
“⌦S⌦
”
�
TN
: polinomio de Chebyshev
Rizado constante en la banda de recha-zo y caracterıstica monotona en la ban-da de paso.
Elıpticoo Cauer (polosy ceros)
|H(⌦)|2 =1
1 + ✏2UN
⇣⌦
⌦P
⌘
UN
: funcion elıptica Jacobiana
de orden N
Rizado constante tanto en la banda depaso como en la de rechazo.
Bessel (todo-polos)
H(s) =1
BN
(s)
BN
(s): funciones de Bessel
B0
(s) = 1
B1
(s) = s + 1
BN
(s) = (2N � 1)BN�1
(s) + s2BN�2
(s)
Respuesta de fase lineal en la banda depaso (aunque se destruye en la conver-sion a digital).
6
Cuadro 8: Transformaciones de frecuencia para filtros analogicos.
Tipo de filtro Transformacion Nuevasdeseado frecuencias
de corte
Paso bajo s! ⌦P
⌦0P
s ⌦0P
Paso alto s! ⌦P
⌦0P
s⌦0
P
Paso banda s! ⌦P
s2 + ⌦l
⌦u
s(⌦u
� ⌦l
)⌦
u
, ⌦l
Supresor de banda s! ⌦P
s(⌦u
� ⌦l
)
s2 + ⌦l
⌦u
⌦u
, ⌦l
⌦P : frecuencia de corte del prototipo
⌦l: frecuencia de corte inferior
⌦u: frecuencia de corte superior
Cuadro 9: Transformaciones de frecuencia para filtros digitales.
Tipo de filtro Transformacion Constantes Nuevasdeseado frecuencias
de corte
Paso bajo z�1 ! z�1 � a
1� az�1
a =sen
„!P�!0P
2
«
sen
„!P +!0
P2
« !0P
Paso alto z�1 ! z�1 + a
1 + az�1
a =cos
„!P +!0P
2
«
cos
„!P�!0
P2
« !0P
Paso banda z�1 ! z�2 � a1
z�1 + a2
a2
z�2 � a1
z�1 + 1a
1
= �2↵ K
K+1
!u
, !l
a2
= K�1
K+1
↵ =cos(!u+!l
2 )cos(!u�!l
2 )K = cot !u�!l
2
tan !P2
Supresor z�1 ! z�2 � a1
z�1 + a2
a2
z�2 � a1
z�1 + 1a
1
= �2↵ 1
K+1
!u
, !l
de banda a2
= 1�K
1+K
↵ =cos(!u+!l
2 )cos(!u�!l
2 )K = tan !u�!l
2
tan !P2
!P : frecuencia de corte normalizada del prototipo
!l: frecuencia de corte normalizada inferior
!u: frecuencia de corte normalizada superior
7
Tratamiento Digital de Señales GIET Marcelino Martínez Sober
Filtros Analógicos. Revisión
! "! "# $! "
1,...,1,0,:
/log2
1/1log
/1
1)(
2)12(
2
10
2
210
2
2
%&''(&
(('
%&
(()&(
)
NkeesPolos
NH
Nkjj
ck
cs
N
c
**
+
Filtros de Butterworth
•Respuesta plana en banda pasante y atenuada.
•Solo Polos.
•Respuesta monótona decreciente.
•Polos distribuidos en una circunferencia de radio unidad
10−2
10−1
100
101
102
−200
−150
−100
−50
0
Filtro de Butterworth !c=1
|H(!
)|(d
B)
Frecuencia
N=1N=2N=3N=4N=5
10−2
10−1
100
101
102
0
0.2
0.4
0.6
0.8
1
Filtro de Butterworth !c=1
|H(!
)|
Frecuencia
N=1N=2N=3N=4N=5
lunes 5 de marzo de 12
Estimación Orden Butterworth
Estimación Orden Tchebyshev
Tratamiento Digital de Señales GIET Marcelino Martínez Sober
Filtros Analógicos. Revisión
10−2
10−1
100
101
102
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Filtro de Chebyshev I !c=1
|H(!
)|
Frecuencia
N=1N=2N=3N=4N=5
! " ! " ! "cs
cs
c
scNch
ch
NT
H##
$$%
&''(
)
*
+,
-./
01##2
##
++,
-
.
./
0
323121
455##32
4# 1
1
/
1
1/log
)1(11log
10/1
1)(
1
2
1
2
10
2
2
22
2
2
2
10
22
2 6776677
66
2
1 111 67 241
Filtros de Chebyshev I
8 Son filtros solo polos
8 Presentan rizado constante en la banda pasante
8Presentan una caída monotónica en la banda no pasante.
8Menor orden que Butterworth
TN(x), el polinomio de Tchebyshev que se define como:
! "! "9:
9;<
=3
534
1
1
1coshcosh
1coscos)(
1
1
xxN
xxNxT
N
TN+1(x)=23x3TN(x)-TN-1(x) con T0(x)=1 y T1(x)=x.
>TN(x)>51 ? @x@<1
TN(1)=1 ? N,
Todas las raíces de TN(x) están en xAB-1,+1CTodas las curvas pasan por
! "H
Tc
N
( )# #4 42 3
42
2
2 2 2
1
1 1
1
16 6
lunes 5 de marzo de 12
Tratamiento Digital de Señales GIET Marcelino Martínez Sober
Filtros Analógicos. Revisión
10−2
10−1
100
101
102
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Filtro de Chebyshev I !c=1
|H(!
)|
Frecuencia
N=1N=2N=3N=4N=5
! " ! " ! "cs
cs
c
scNch
ch
NT
H##
$$%
&''(
)
*
+,
-./
01##2
##
++,
-
.
./
0
323121
455##32
4# 1
1
/
1
1/log
)1(11log
10/1
1)(
1
2
1
2
10
2
2
22
2
2
2
10
22
2 6776677
66
2
1 111 67 241
Filtros de Chebyshev I
8 Son filtros solo polos
8 Presentan rizado constante en la banda pasante
8Presentan una caída monotónica en la banda no pasante.
8Menor orden que Butterworth
TN(x), el polinomio de Tchebyshev que se define como:
! "! "9:
9;<
=3
534
1
1
1coshcosh
1coscos)(
1
1
xxN
xxNxT
N
TN+1(x)=23x3TN(x)-TN-1(x) con T0(x)=1 y T1(x)=x.
>TN(x)>51 ? @x@<1
TN(1)=1 ? N,
Todas las raíces de TN(x) están en xAB-1,+1CTodas las curvas pasan por
! "H
Tc
N
( )# #4 42 3
42
2
2 2 2
1
1 1
1
16 6
lunes 5 de marzo de 12
Tratamiento Digital de Señales GIET Marcelino Martínez Sober
Transformaciones en frecuencia en el dominio Z
32
INGENIERÍA ELECTRÓNICA
4.5.- Transformaciones en frecuencia.
Las transformaciones digitales son:
P. Baja ! P. Baja
"’ nueva frecuencia de
corte
P. Baja ! P. Alta
"’ nueva frecuencia de
corte
P. Baja ! P. Banda
"l frecuencia inferior de la
banda
"u frecuencia superior de la
banda
" frecuencia de corte del
filtro pasa-baja
P. Baja ! Elimina Banda
"l frecuencia inferior de la
banda
"u frecuencia superior de la
banda
" frecuencia de corte del
Si aplicamos la transformación Bilineal a las Transformaciones en frecuencia analógicas obtenemos las T. en Frecuencia en el dominio Z.
lunes 5 de marzo de 12
Transf. en frecuencia digitales
3
Tratamiento Digital de Señales GIET Marcelino Martínez Sober
Estructuras en celosía. (lattice)
!!
!
!!
!
!!
!!
+=
+=
=
=
"#"
!+=
!+=
=
=
=
=
!!
=!
!!=
== $$
!!
! +=
!!=
==
Obtenemos los coeficientes de reflexión
Recursión “Descendente”
Calculamos Am(z) y finalmente AM(z)=H(z)
Recursión “Ascendente”
lunes 5 de marzo de 12
Tratamiento Digital de Señales GIET Marcelino Martínez Sober
Estructuras en celosía. (lattice-ladder)
1º consideramos que es una celosía todo-polos y calculamos los coeficientes de reflexión.2º Calculamos los coeficientes de la “escalera”, vm utilizando CM(z)
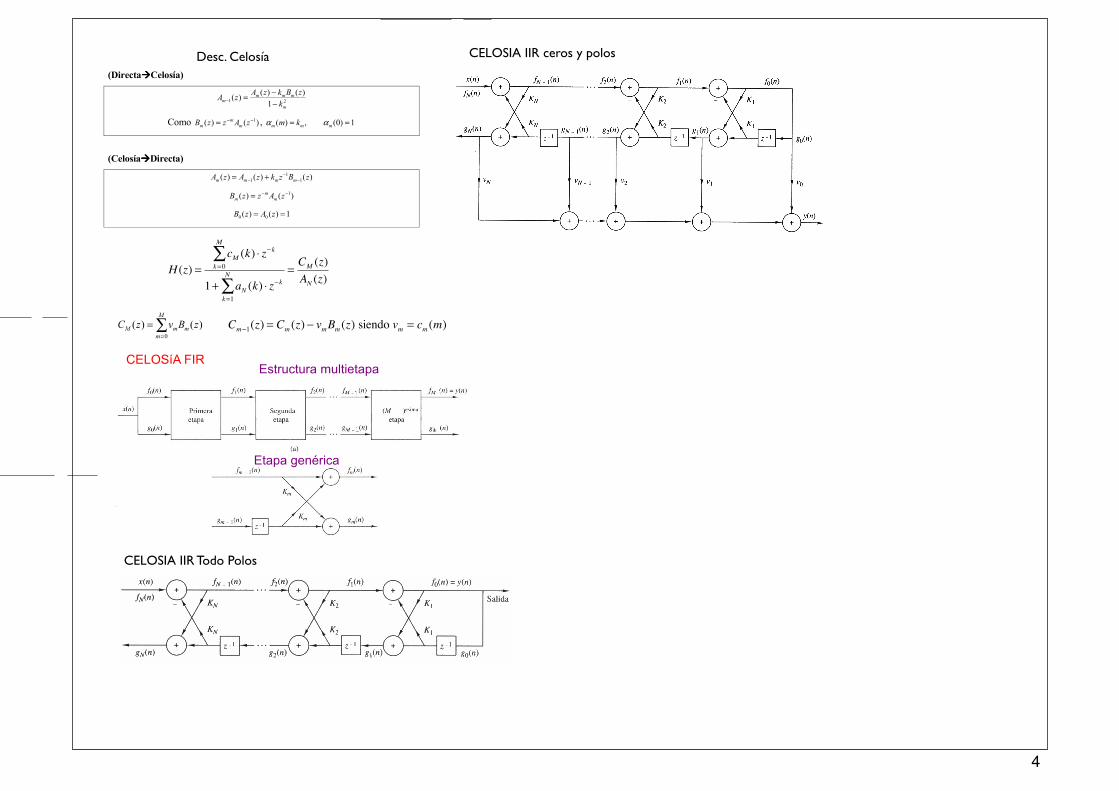
CELOSíA IIR con ceros y polos
H (z) =cM (k) ⋅ z
−k
k=0
M
∑
1+ aN (k) ⋅ z−k
k=1
N
∑=CM (z)AN (z) Cm−1(z) = Cm (z) − vmBm (z) siendo vm = cm (m)
La salida total del sistema se puede obtener como una combinación lineal de las salidas del sistema todo ceros (ver Proakis).
lunes 5 de marzo de 12 Tratamiento Digital de Señales GIET Marcelino Martínez Sober
Estructuras en celosía. (lattice-ladder)
1º consideramos que es una celosía todo-polos y calculamos los coeficientes de reflexión.2º Calculamos los coeficientes de la “escalera”, vm utilizando CM(z)
CELOSíA IIR con ceros y polos
H (z) =cM (k) ⋅ z
−k
k=0
M
∑
1+ aN (k) ⋅ z−k
k=1
N
∑=CM (z)AN (z) Cm−1(z) = Cm (z) − vmBm (z) siendo vm = cm (m)
La salida total del sistema se puede obtener como una combinación lineal de las salidas del sistema todo ceros (ver Proakis).
lunes 5 de marzo de 12
Tratamiento Digital de Señales GIET Marcelino Martínez Sober
Estructuras en celosía. (lattice-ladder)
1º consideramos que es una celosía todo-polos y calculamos los coeficientes de reflexión.2º Calculamos los coeficientes de la “escalera”, vm utilizando CM(z)
CELOSíA IIR con ceros y polos
H (z) =cM (k) ⋅ z
−k
k=0
M
∑
1+ aN (k) ⋅ z−k
k=1
N
∑=CM (z)AN (z) Cm−1(z) = Cm (z) − vmBm (z) siendo vm = cm (m)
La salida total del sistema se puede obtener como una combinación lineal de las salidas del sistema todo ceros (ver Proakis).
lunes 5 de marzo de 12
Desc. Celosía
Tratamiento Digital de Señales GIET Marcelino Martínez Sober
Estructuras en celosía. (lattice)CELOSíA IIR todo polos
H (z) = 1
1+ αN (k)z−k
k=1
N
∑=
1AN (z)
y(n) = − αN (k)y(n − k)k=1
N
∑ + x(n)
si intercambiamos y(n) y x(n)tenemos un sistema FIR y podemos calcular Km.
y(n) = x(n) + αN (k)x(n − k)k=1
N
∑
x(n) = fN (n)fm−1(n) = fm (n) − kmgm−1(n −1)gm (n) = km fm−1(n) + gm−1(n −1)y(n) = f0 (n) = g0 (n)
Ecuaciones de recurrencia
Si |Km|<1 El sistema es ESTABLE
•
•
!<
="+
"=
=
#
=
#
=
=$==
lunes 5 de marzo de 12
Tratamiento Digital de Señales GIET Marcelino Martínez Sober
Estructuras en celosía. (lattice)✓Presentan una gran robustez numérica.✓Modularidad para la implementación.✓Constituyen un método para determinar la estabilidad de un sistema IIR (Schur-Cohn Test)✓Se trata de estructuras no DIRECTAS✓Distinguimos 3 casos: Sistemas MA(FIR), AR(IIR solo polos), ARMA(IIR con ceros y polos)
CELOSíA FIR
Estructura multietapa
Etapa genérica
Definimos el conjunto de filtros:
Dado H (z) = h(k)z−kk=0
M
∑
Am (z) = αm (k)z−k
m ≥ 1αm (0) = 1αm (m) = Km
k=0
m
∑
H (z) = AM (z)
Km= COEFICIENTES DE REFLEXIÓN
¿ C ó m o o b t e n e r l o s coeficientes de reflexión a partir de H(z) ?
f0 (n) = g0 (n) = x(n)fm (n) = fm−1(n) + kmgm−1(n −1)gm (n) = km fm−1(n) + gm−1(n −1)fM (n) = y(n)
Ecuaciones de recurrencia
lunes 5 de marzo de 12
CELOSIA IIR Todo Polos
CELOSIA IIR ceros y polos
4