fénypont a falon - 5
TRANSCRIPT

Fénypont a falon – 5. Legutóbbi írásunkban, a Fénypont a falon című dolgozat - sorozatunk 2. részéhez fűzött Kiegészítés - ben egy az eredeti feladat módosított változatáról írtunk, melyet Hajdu Endre oldott meg, szerkesztő - számító eljárással. Most ezt a feladatot és meg -oldását vesszük át részletesen, mintegy hiánypótlásképpen.
A feladat Ehhez tekintsük az 1. ábrát is!
1. ábra Itt azt látjuk, hogy egy O ponton átmenő, a rajz síkjára merőleges tengely körül ω = konst. szögsebességgel forog az R hosszúságú kar, melyre egy F fényceruzát szerel -tünk, a karra merőleges tengellyel. A fényceruzából kilépő fénysugár az O - tól d tá -volságra lévő, a forgástengellyel párhuzamos síkot egy P pontban találja el. Meghatározandó a P pont helyzete, sebessége és gyorsulása a t idő függvényében.
A megoldás Feladatunkat kétféleképpen is megoldjuk; elnevezzük ezeket I. és II. megoldásnak. Az I. megoldásnál csak számítással, a II. megoldásnál számítással és szerkesztéssel is dolgozunk. Szerkesztés alatt a sebességi és gyorsulási vektorábrák elkészítését értjük. A megoldás során az eredményeket az idő függvényében állítjuk elő, vagyis az 1. áb -rának megfelelően keressük a P( t ) pont helyzetét, annak v( t ) sebességét és a( t ) gyorsulását. Az 1. ábrán az időszámítás kezdetén – tehát a t = 0 időpontban – előálló helyzetet is feltüntettük.
2
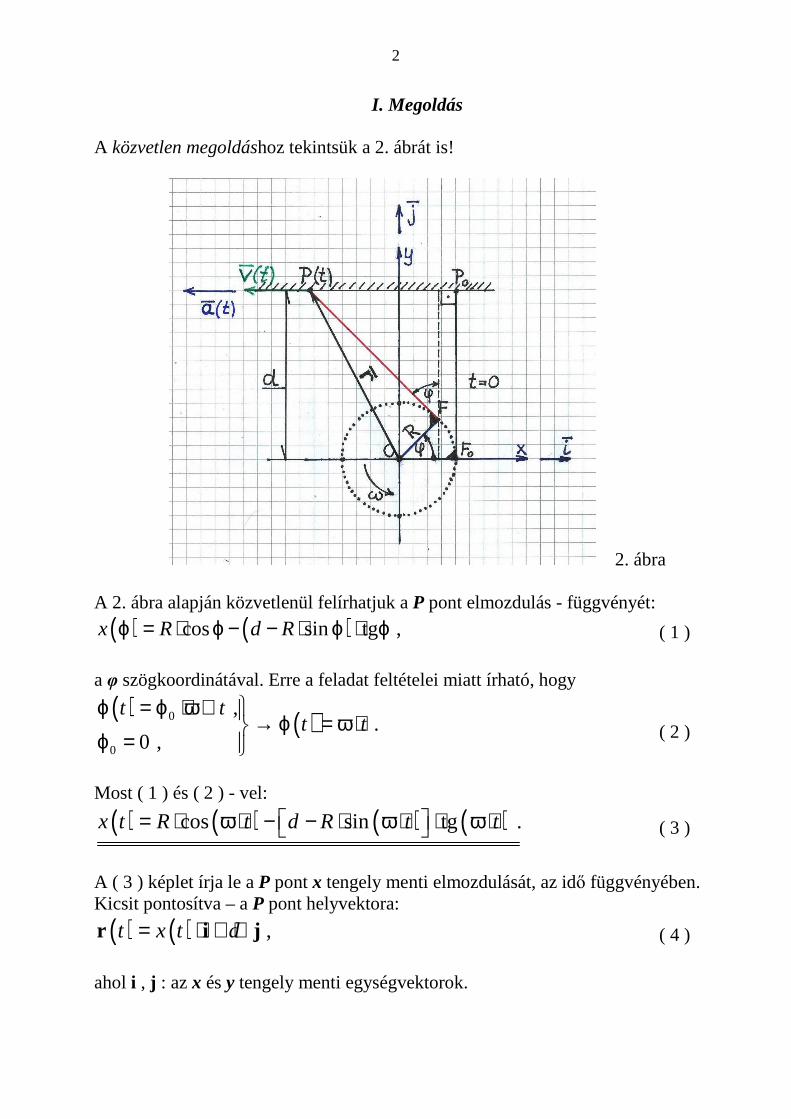
I. Megoldás A közvetlen megoldáshoz tekintsük a 2. ábrát is!
2. ábra A 2. ábra alapján közvetlenül felírhatjuk a P pont elmozdulás - függvényét:
( ) ( )cos sin tg ,x R d Rϕ = ⋅ ϕ − − ⋅ ϕ ⋅ ϕ ( 1 )
a φ szögkoordinátával. Erre a feladat feltételei miatt írható, hogy
( ) ( )0
0
, .
0 ,
t tt t
ϕ = ϕ + ω⋅ → ϕ = ω⋅ϕ =
( 2 )
Most ( 1 ) és ( 2 ) - vel:
( ) ( ) ( ) ( )cos sin tg .x t R t d R t t = ⋅ ω⋅ − − ⋅ ω⋅ ⋅ ω⋅ ( 3 )
A ( 3 ) képlet írja le a P pont x tengely menti elmozdulását, az idő függvényében. Kicsit pontosítva – a P pont helyvektora:
( ) ( ) ,t x t d= ⋅ + ⋅r i j ( 4 )
ahol i , j : az x és y tengely menti egységvektorok.

3
A P pont sebességvektor - függvényét ( 4 ) - ből kapjuk:
( ) ( ) ,d
t x tdt
= = ⋅rv iɺ ( 5 )
ahol az idő szerinti deriválást ponttal is jelöljük. Most a közvetett függvény ismert differenciálási szabálya szerint:
( ) ,dx dx d dx
x tdt d dt d
ϕ= = ⋅ = ⋅ωϕ ϕ
ɺ ( 6 )
majd ( 1 ) - ből:
( ) ( )
( ) 2
2
cos sin tg
1 sin cos tg sin
cos
sin sin sin ,
cos
dx dR d R
d d
R R d R
d RR R
ϕ = ⋅ ϕ − − ⋅ ϕ ⋅ ϕ = ϕ ϕ
= − ⋅ ϕ − − ⋅ ϕ⋅ ϕ + − ⋅ ϕ ⋅ = ϕ
− ⋅ ϕ= − ⋅ ϕ + ⋅ ϕ −ϕ
tehát:
2
sin ;
cos
dx d R
d
− ⋅ ϕ= −ϕ ϕ ( 7 )
most ( 6 ) és ( 7 ) - tel:
( ) ( )( )2
sin ;
cos
d R tx t
t
− ⋅ ϕ= −ω⋅
ϕɺ ( 8 )
majd ( 2 ) és ( 8 ) - cal:
( ) ( )( )2
sin ;
cos
d R tx t
t
− ⋅ ω⋅= −ω⋅
ω⋅ɺ ( 9 )
ezzel a P pont sebesség vektora ( 5 ) és ( 9 ) szerint:
( ) ( )( )2
sin .
cos
d R tt
t
− ⋅ ω⋅= −ω⋅ ⋅
ω⋅v i ( 10 )
A P pont gyorsulásvektor - függvényét ( 10 ) - ből kapjuk:

4
( ) ( ) ( ) .d t
t x tdt
= = ⋅v
a iɺɺ ( 11 )
Most ( 9 ) differenciálásával:
( ) ;dx dx d dx
x tdt d dt d
ϕ= = ⋅ = ⋅ωϕ ϕ
ɺ ɺ ɺɺɺ ( 12 )
majd ( 8 ) - ból, a tört differenciálási szabálya szerint:
( ) ( ) ( )( )( ) ( )
( ) ( )
2
2 2
22
2
4
2
3
2
sin
cos
sin ' cos sin cos '
cos
cos cos sin 2 cos sin
cos
cos sin 2 sin
cos
cos 2 sin si
dx d d R
d d
d R d R
R d R
R d R
R d R
− ⋅ ϕ= −ω⋅ = ϕ ϕ ϕ
− ⋅ ϕ ⋅ ϕ − − ⋅ ϕ ⋅ ϕ= −ω⋅ =
ϕ
− ⋅ ϕ⋅ ϕ − − ⋅ ϕ ⋅ ⋅ ϕ⋅ − ϕ= −ω⋅ =
ϕ⋅ ϕ + − ⋅ ϕ ⋅ ⋅ − ϕ
= ω⋅ =ϕ
⋅ ϕ − ⋅ ϕ⋅ − ⋅= ω⋅
ɺ
( )
( ) ( )
( )
2 2
3 3
2 2 2
3 3
2
3
n cos 2 sin 2 sin
cos cos
1 sin 2 sin 2 sin 1 sin 2 sin
cos cos
2 sin 1 sin ,
cos
R d R
R R d R d
d R
ϕ ⋅ ϕ − ⋅ ⋅ ϕ + ⋅ ⋅ ϕ= ω⋅ =ϕ ϕ
⋅ − ϕ + ⋅ ⋅ ϕ − ⋅ ⋅ ϕ ⋅ + ϕ − ⋅ ⋅ ϕ= ω⋅ = ω⋅ =
ϕ ϕ
⋅ ⋅ ϕ − ⋅ + ϕ= −ω⋅
ϕ tehát:
( )2
3
2 sin 1 sin ;
cos
d Rdx
d
⋅ ⋅ ϕ − ⋅ + ϕ= −ω⋅
ϕ ϕɺ
( 13 )
majd ( 12 ) és ( 13 ) - mal:
( )2
23
2 sin 1 sin ,
cos
d Rx
⋅ ⋅ ϕ − ⋅ + ϕ= −ω ⋅
ϕɺɺ ( 14 )
ezután ( 2 ) és ( 14 ) - gyel a skaláris gyorsulás - függvény:

5
( ) ( ) ( )( )
2
23
2 sin 1 sin .
cos
d t R tx t
t
⋅ ⋅ ω⋅ − ⋅ + ω⋅ = −ω ⋅ω⋅
ɺɺ ( 15 )
Végül ( 11 ) és ( 15 ) - tel a P pont gyorsulásvektora:
( ) ( ) ( )( )
2
23
2 sin 1 sin .
cos
d t R tt
t
⋅ ⋅ ω⋅ − ⋅ + ω⋅ = −ω ⋅ ⋅ω⋅
a i ( 16 )
Számpélda
Adatok – átvéve Hajdu Endrétől – : R = 2 cm, d = 6 cm, ω = π / 6 rad / s, t* = 3 / 2 s. ( A ) Eredmények:
( )( )( ) 2
3,17 cm ;
4,80 cm/s ;
4,25 cm/s .
x t
v t
a t
∗ ≅ −∗ ≅ − ∗ ≅ −
( 17 )
Ezek közül a 2. és a 3. jól egyezik – az előjeltől eltekintve – Hajdu Endre eredménye -ivel; az 1. természetesen nem, mert itt másként vettük fel az alaphelyzetet.
II. Megoldás A közvetett megoldáshoz felfrissítjük a Mechanikában tanultakat. Ehhez segítségül hívjuk az [ 1 ] munkát is. Ebben a tankönyvben viszonylag kevés matematikával, a fizikai szemlélet alapján, egyszerűen, érthetően levezetik az itt is használatba veendő összefüggéseket. A probléma lényege: egy térbeli mozgás legfőbb jellemzőinek leírása egy K nyugvó, és a hozzá képest tetszőlegesen mozgó K’ koordi - náta - rendszerben. Ehhez tekintsük a 3. ábrát is!
3. ábra – forrása: [ 1 ]

6
Felírják, illetve levezetik az alábbi összefüggéseket ~ a P pont térbeli helyvektorára:
,0r = r + r' ( a ) ~ sebességekre:
,0 fv = v + v + v' ( b ) ~ a gyorsulásokra:
( ) ;⋅0a = a + a'+ 2 ω× v'+ω× ω×r' + ω×r'ɺ ( c )
az alkalmazott jelölések:
~ 0r : az 'OO�����
helyvektor;
~r' : az 'O P�����
helyvektor;
~ 0v : a K’ rendszernek a K - ra vonatkoztatott transzlációs sebessége;
~ fv : az O’ ponton átmenő, tetszőleges állású forgástengely körül végzett, ω szög - sebességű forgás sebessége;
~ v' : a K’ - höz képesti mozgás ( relatív ) sebessége;
~ 0a : a K’ rendszernek a K - ra vonatkoztatott transzlációs gyorsulása;
~ a' : a P pont K’ - ben mért ( relatív ) gyorsulása;
~ ⋅ = C2 ω× v' a : a Coriolis - gyorsulás;
~ ( ) = cpω× ω×r' a : a centripetális gyorsulás (v.ö.: [ 2 ]! );
~ ω×r'ɺ : a szöggyorsulásból származó gyorsulás. Megjegyzések: M1. Némi meglepetést okozhat, hogy a magyar nyelvű szakirodalomban kerülik a centripetális gyorsulás elnevezés használatát a relatív mozgás kinematikájában. A [ 3 ] alapvető tankönyvben ennek ellentettjét nevezik meg, centrifugális gyorsu -lásként. M2. Rendszerint úgy járnak el a szerzők, hogy csoportosítják a ( b ) és a ( c ) képletek tagjait, majd e csoportoknak adnak külön nevet, az alábbiak szerint:
~ ( b ) - ből: ( ) ,=0 f sz relv = v + v + v' v + v
tehát:
;sz relv = v + v ( d )

7
vagyis a P pont abszolút sebessége egyenlő a szállító / vezetési és a relatív sebességek vektori összegével; ~ ( c ) - ből:
( )( )( )
=
= ,
⋅
+ + + + ⋅ = C
0
0 sz rel
a = a + a'+ 2 ω× v'+ω× ω×r' + ω×r'
a ω×r' ω× ω×r' a' 2 ω× v' a + a + a
ɺ
ɺ
tehát:
;= Csz rela a + a + a ( e )
vagyis a P pont abszolút gyorsulása egyenlő a szállító / vezetési, a relatív és a Coriolis - gyorsulás vektori összegével. Feladatunk szempontjából több egyszerűsítés is lehetséges, az általános esethez képest. Esetünkben fennáll, hogy
, , , = = =0 0v 0 a 0 ω 0ɺ ( f ) így a maradó képletek az alábbiak: ~ a sebességekre:
,
= ,
' ;
d
dt
= = =
sz rel
sz f
rel
v = v + v
v v ω×r'
r'v v'
( g )
~ a gyorsulásokra:
( ) ,
,
2 ,
' .
d
dt
=
= = ⋅= =
C
C
sz rel
sz
rel
relrel
a a + a + a
a ω× ω×r'
a ω× v
va a'
( h )
A d’ ( ) / dt jelölés azt jelenti, hogy a K’ - re vonatkozó differenciálásról van szó, vagyis amikor K’ egységvektorai rögzítettek. M3. A vsz , asz, tehát az „sz” indexű vektor - jelölések elnevezései a műszaki mechanikában honos „ szállító”, míg az elméleti mechanikában rögzült „vezetési” jelzőkre utalnak. M4. A Coriolis - gyorsulást néha kis c - vel írják, legalábbis indexben – [ 4 ]. M5. A sebességek és a gyorsulások indexeit leginkább alul helyezik el.

8
Ezek után visszatérhetünk feladatunkhoz. A folytatáshoz tekintsük a 4. ábrát is!
4. ábra Itt azt látjuk, hogy külön feltüntettük a nyugvó Oxy, valamint az ω = konst. szögsebességgel forgó O1x1y1 derékszögű koordináta - rendszereket. Megemlítjük, hogy a mozgó rendszert itt nem vesszővel, hanem „1” lábindexszel különböztetjük meg az állótól. A P fénypont helyvektora a mozgó rendszerben, r’ ≡ r 1
P - vel:
1 1 ,P Px y= ⋅ + ⋅P1 1 2r e e ( 18 )
ahol a 4. ábra szerint is:
( )
( ) ( )( )
1
1
,
sin .
cos
P
P
x t R
d R ty t
t
=
− ⋅ ω⋅ = ω⋅
( 19 )
A forgó és az álló egységvektorok közötti összefüggések – 5. ábra:
5. ábra
( ) ( )( ) ( )
cos sin ,
sin cos .
t t
t t
= ω⋅ ⋅ + ω⋅ ⋅
= − ω⋅ ⋅ + ω⋅ ⋅
1
2
e i j
e i j ( 20 )

9
Most ( 18 ) és ( 19 ) - cel:
( ) ( )( )sin
.cos
d R tt R
t
− ⋅ ω⋅= ⋅ + ⋅
ω⋅P1 1 2r e e ( 21 )
Majd a ( g / 4) és ( 21 ) képletekkel a relatív sebesség:
( ) ( )( )
( ) ( ) ( )( ) ( )( )( )
( ) ( ) ( )( )
( )( )
( )
2
2 2
2 2
' sin
cos
cos cos sin sin
cos
cos sin sin sin =
cos cos
sin =
cos
d t d R td
dt dt t
R t t d R t t
t
R t R t d t R d t
t t
d t R
− ⋅ ω⋅= = ⋅ = ω⋅
− ⋅ ω⋅ ⋅ ω⋅ − − ⋅ ω⋅ ⋅ − ω⋅= ⋅ω⋅ =
ω⋅
⋅ ω⋅ + ⋅ ω⋅ − ⋅ ω⋅ − ⋅ ω⋅= − ⋅ω⋅ = − ⋅ω⋅
ω⋅ ω⋅
⋅ ω⋅ −⋅ω⋅
P1
rel 2
2
2 2
2
rv e
e
e e
e( )2
,tω⋅
tehát:
( ) ( )( )2
sin .
cos
d t Rt
t
⋅ ω⋅ −= ω⋅ ⋅
ω⋅rel 2v e ( 22 )
Másképpen:
( ) ( )
( ) ( )( )2
,
sin .
cos
rel
rel
t v t
d t Rv t
t
= ⋅
⋅ ω⋅ − = ω⋅ ω⋅
rel 2v e
( 23 )
Számszerűen, az ( A ) adatokkal és ( 23 ) - mal:
( ) 2,35 cm / s .relv t∗ ≅ ( E 1 / 1 )
Ez jól egyezik Hajdu Endre megfelelő eredményével. Továbbá ( 23 / 1 ) és ( E 1 / 1 ) - gyel:
( ) 2,35 cm / s .t ∗ = ⋅rel 2v e ( E 1 / 2 )
Most a ( g / 2 ) és a ( 21 ) képletekkel a szállító sebesség:

10
( ) 1 1 1 1 ;P P P Pt x y x y = = ⋅ + ⋅ = ⋅ + ⋅ P
sz 1 1 2 1 2v ω×r ω× e e ω×e ω×e ( 24 )
most figyelembe vesszük, hogy a 6. ábra szerint is:
6. ábra így ( 24 ) és ( 25 ) - tel:
( ) ( )1 1 1 1 .P P P Px y y x= ⋅ω⋅ + ⋅ −ω⋅ = ω⋅ − ⋅ + ⋅sz 2 1 1 2v e e e e ( 26 )
( 24 ) első egyenlőségéből közvetlenül kiolvasható, hogy
.⊥ Psz 1v r ( 27 )
Most ( 19 ) és ( 26 ) - tal a szállító sebesség vektora:
( ) ( )( )sin
.cos
d R tt R
t
− ⋅ ω⋅= ω⋅ − ⋅ + ⋅ ω⋅
sz 1 2v e e ( 28 )
E vektor nagysága / abszolút értéke:
( )( )
( )( )
2 2
2 2sz
sin sinv 1 ,
cos cos
d R t d R tR R
t R t
− ⋅ ω⋅ − ⋅ ω⋅= = ω⋅ + = ⋅ω⋅ + ω⋅ ⋅ ω⋅
szv
tehát:
( ) ( )( )
2
sz
sinv 1 .
cos
d R tt R
R t
− ⋅ ω⋅= ⋅ω⋅ + ⋅ ω⋅
( 29 )
Számszerűen, az ( A ) adatokkal és ( 29 ) - cel:
( )szv 3,55 cm / s ,t ∗ ≅ ( E 2 )
egyezésben Hajdu Endre megfelelő eredményével.
,
,
= ω⋅ = ω⋅ = ω⋅ = −ω⋅
1 3 1 2
2 3 2 1
ω×e e ×e e
ω×e e ×e e ( 25 )
11
A t = t* időpontra vonatkozó sebességi pillanatkép szerkesztését az ( E 1 / 2 ), ( 27 ) és ( E 2 ) eredmények szerint lehet elvégezni, ahogyan azt az előző dolgozatban már láttuk Hajdu Endre ábráin, ahol a gyorsulási pillanatkép is megszemlélhető. A relatív gyorsulás kifejezését ( h / 4 ) és ( 22 ) szerint írjuk fel:
( )( )
( )( )
( ) ( ) ( ) ( ) ( )( )
( ) ( )
2 2
22
4
22
sin sin' '
cos cos
cos cos sin 2 cos sin
cos
cos sin 2 sin
d t R d t Rd d d
dt dt t dt t
d t t d t R t t
t
d t d t R
⋅ ω⋅ − ⋅ ω⋅ −= = ω⋅ ⋅ = ω⋅ ⋅ = ω⋅ ω⋅
⋅ ω⋅ ⋅ ω⋅ − ⋅ ω⋅ − ⋅ ⋅ ω⋅ ⋅ − ω⋅ = ω ⋅ ⋅ =ω⋅
⋅ ω⋅ − ⋅ ω⋅ − ⋅ ⋅ − = ω ⋅ ⋅
relrel 2 2
2
2
va e e
e
e( )
( )( ) ( ) ( )
( )( ) ( ) ( )
( )( ) ( )
( )
3
2 22
3
2 2
23
2
23
cos
cos 2 sin 2 sin
cos
1 sin 2 sin 2 sin
cos
1 sin 2 sin ,
cos
t
t
d t d t R t
t
d t d t R t
t
d t R t
t
ω⋅ =ω⋅
⋅ ω⋅ + ⋅ ⋅ ω⋅ − ⋅ ⋅ ω⋅= ω ⋅ ⋅ =
ω⋅
⋅ − ω⋅ + ⋅ ⋅ ω⋅ − ⋅ ⋅ ω⋅ = ω ⋅ ⋅ =ω⋅
⋅ + ω⋅ − ⋅ ⋅ ω⋅ = ω ⋅ ⋅ω⋅
2
2
2
e
e
e
tehát:
( ) ( ) ( )( )
2
23
1 sin 2 sin .
cos
d t R tt
t
⋅ + ω⋅ − ⋅ ⋅ ω⋅ = ω ⋅ ⋅ω⋅rel 2a e ( 30 )
Másképpen:
( ) ( )
( ) ( ) ( )( )
2
23
,
1 sin 2 sin .
cos
rel
rel
t a t
d t R ta t
t
= ⋅
⋅ + ω⋅ − ⋅ ⋅ ω⋅ = ω ⋅ ω⋅
rel 2a e
( 31 )
Számszerűen, az ( A ) adatokkal és ( 31 ) - gyel:
( ) 24,79 cm / s ;rela t∗ ≅ ( E 3 / 1 )
majd ( 31 / 1 ) és ( E 3 / 1 ) - gyel:
( ) 24,79 cm / s .t ∗ = ⋅rel 2a e ( E 3 / 2 )
Az ( E 3 / 1 ) eredmény jól egyezik a Hajdu Endre ábrájáról lemérhető eredménnyel.
12
A Coriolis - gyorsulás kifejezését ( h / 3 ) és ( 23 ) szerint írjuk fel:
( )( ) ( )
( ) ( ) ( )( )
22
2 2 2
sin 2 2 ,
cos
rel rel
rel
v t v t
d t Rv t
t
= ⋅ = ⋅ω⋅ ⋅ = ⋅ω⋅ ⋅ =
⋅ ω⋅ −= ⋅ω⋅ ⋅ − = − ⋅ω ⋅ ⋅
ω⋅
C rel 3 2 3 2
1 1
a ω× v e × e e ×e
e e
tehát:
( ) ( )( )
22
sin2 .
cos
d t Rt
t
⋅ ω⋅ −= − ⋅ω ⋅ ⋅
ω⋅C 1a e ( 32 )
Másképpen:
( ) ( )( )
22
,
sin2 .
cos
c
c
a
d t Ra t
t
= ⋅
⋅ ω⋅ − = − ⋅ω ⋅ ω⋅
C 1a e
( 33 )
Számszerűen, az ( A ) adatokkal és ( 33 / 2 ) - vel:
( ) 22,46 cm / s ;ca t∗ ≅ − ( E 4 / 1 )
ez – az előjeltől eltekintve – jól egyezik Hajdu Endre megfelelő részeredményével. Majd ( 33 / 1 ) és ( E 4 / 1 ) - gyel:
( ) 22,46 cm / s .t ∗ = − ⋅C 1a e ( E 4 / 2 )
A szállító gyorsulás kifejezését ( h / 2 ), ( 18 ) és ( 26 ) alapján írjuk fel:
( ) ( )( ) ( )
( ) ( )
1 1
2 21 1 1 1
2 2 21 1 1 1
,
P P
P P P P
P P P P
y x
y x y x
y x x y
= = = ω⋅ ω⋅ − ⋅ + ⋅ =
= ω ⋅ − ⋅ + ⋅ = ω ⋅ − ⋅ + ⋅ =
= ω ⋅ − ⋅ − ⋅ = −ω ⋅ ⋅ + ⋅ = −ω ⋅
Psz 1 sz 3 1 2
3 1 2 3 1 3 2
P2 1 1 2 1
a ω× ω×r ω× v e × e e
e × e e e ×e e ×e
e e e e r
tehát: 2 .= −ω ⋅ P
sz 1a r ( 34 ) Ezután ( 18 ), ( 19 ) és ( 34 ) - gyel:
( )( )
2 sin ,
cos
d R tR
t
− ⋅ ω⋅= −ω ⋅ ⋅ + ⋅ ω⋅
sz 1 2a e e ( 35 )

13
majd képezve az abszolút értékét:
( )( )
( )( )
2
2 2 2sz
2
2
sina
cos
sin 1 ,
cos
d R tR
t
d R tR
R t
− ⋅ ω⋅= = = ω ⋅ + = ω⋅
− ⋅ ω⋅= ⋅ω ⋅ + ⋅ ω⋅
sz sza a
tehát:
( )( )
2
2sz
sina 1 .
cos
d R tR
R t
− ⋅ ω⋅= ⋅ω ⋅ + ⋅ ω⋅
( 36 )
Számszerűen, az ( A ) adatokkal és ( 36 ) - tal:
2sza 1,86 cm / s ;= ( E / 5 / 1 )
ez jól egyezik Hajdu Endre megfelelő eredményével. Az abszolút sebesség - és gyorsulásvektorok a ( d ) és ( e ) összegzési képletek szerint adódnak. Most elvégezzük ezeket az összegzéseket. Azt várjuk, hogy a ( 10 ) és ( 16 ) eredmények álljanak így is elő. Először: ( d ), ( 22 ) és ( 28 ) - cal:
( )( )
( )( )
( )( )
( )( )
2
2
sin sin
cos cos
sin sin ,
cos cos
d R t d t RR
t t
d R t d t RR
t t
− ⋅ ω⋅ ⋅ ω⋅ −ω⋅ − ⋅ + ⋅ ω⋅ ⋅ = ω⋅ ω⋅
− ⋅ ω⋅ ⋅ ω⋅ − = ω⋅ ⋅ − + ⋅ + ω⋅ ω⋅
1 2 2
1 2
v = e e + e
e e
tehát:
( )( )
( )( )2
sin sin .
cos cos
d R t d t RR
t t
− ⋅ ω⋅ ⋅ ω⋅ − ω⋅ ⋅ − + ⋅ + ω⋅ ω⋅ 1 2v = e e ( 37 )
Most ( 20 ) és ( 37 ) - tel:
( )( ) ( ) ( )
( )( ) ( ) ( )2
sincos sin
cos
sin sin cos ;
cos
d R tt t
t
d t RR t t
t
− ⋅ ω⋅ = − ⋅ ω⋅ ⋅ + ω⋅ ⋅ + ω ω⋅
⋅ ω⋅ − + + ⋅ − ω⋅ ⋅ + ω⋅ ⋅ ω⋅
vi j
i j

14
ezt tovább rendezve:
( )( ) ( ) ( )
( ) ( )
( )( ) ( ) ( )
( ) ( )
2
2
sin sincos sin
cos cos
sin sin sin cos ;
cos cos
d R t d t Rt R t
t t
d R t d t Rt R t
t t
− ⋅ ω⋅ ⋅ ω⋅ − = ⋅ − ⋅ ω⋅ − + ⋅ ω⋅ + ω ω⋅ ω⋅
− ⋅ ω⋅ ⋅ ω⋅ −+ ⋅ − ⋅ ω⋅ + + ⋅ ω⋅ ω⋅ ω⋅
vi
j ( 38 )
az egyszerűbb írásmód kedvéért az egységvektorok szorzóit külön számítjuk ki:
( )( ) ( ) ( )
( ) ( )
( ) ( ) ( )( ) ( )
( )( )
( )( )
( ) ( )( )
( )
2
2
2 2 2
2 2 2
sin sincos sin
cos cos
sin sin sin sin
cos
sin sin cos sin sin 1
cos cos cos c
i
d R t d t Rs t R t
t t
d t Rd R t R t t
t
t t t t td R d R
t t t
− ⋅ ω⋅ ⋅ ω⋅ −= − ⋅ ω⋅ − + ⋅ ω⋅ = ω⋅ ω⋅
⋅ ω⋅ − = − − ⋅ ω⋅ − ⋅ ω⋅ − ⋅ ω⋅ = ω⋅
ω⋅ ω⋅ ω⋅ + ω⋅ ω⋅= − ⋅ + + ⋅ = − ⋅ + ⋅ ω⋅ ω⋅ ω⋅ ( )
( )( )( )
( )( )
( )( )
2
2 2 2 2
os
sin sin sin1 ,
cos cos cos cos
t
t d R t d R td R
t t t t
=ω⋅
ω⋅ − + ⋅ ω⋅ − ⋅ ω⋅= − ⋅ + ⋅ = = −
ω⋅ ω⋅ ω⋅ ω⋅tehát:
( )( )2
sin .
cosi
d R ts
t
− ⋅ ω⋅= −
ω⋅ ( 39 )
Hasonlóképpen:
( )( ) ( ) ( )
( ) ( )
( )( ) ( ) ( ) ( )
( )( ) ( ) ( ) ( )
( )( ) ( )
( )
2
2 2
2 2
sin sinsin cos
cos cos
sin sin sin cos
cos cos
sin sin cos sin
cos
sin cos
cos
j
d R t d t Rs t R t
t t
d R t d t Rt R t
t t
d t R t R t d t R
t
R t R t R
t
− ⋅ ω⋅ ⋅ ω⋅ −= − ⋅ ω⋅ + + ⋅ ω⋅ = ω⋅ ω⋅
− ⋅ ω⋅ ⋅ ω⋅ −= − ⋅ ω⋅ + ⋅ ω⋅ + =
ω⋅ ω⋅
− ⋅ ω⋅ + ⋅ ω⋅ + ⋅ ω⋅ + ⋅ ω⋅ −= =
ω⋅
⋅ ω⋅ + ⋅ ω⋅ −=
ω⋅( ) ( )
( )
( )
2 2sin cos
cos
0 ,cos
R t t R
t
R R
t
⋅ ω⋅ + ω⋅ − = =ω⋅
−= =ω⋅
tehát: 0 .js = ( 40 )

15
Most ( 38 ), ( 39 ) és ( 40 ) - nel:
( ) ( )( )
( )( )
2
2
sin0
cos
sin ,
cos
i j i j
d R ts s v v
t
d R t
t
− ⋅ ω⋅= ω⋅ ⋅ + ⋅ = ⋅ + ⋅ = −ω⋅ ⋅ + ⋅ =
ω⋅
− ⋅ ω⋅= −ω⋅ ⋅
ω⋅
v i j i j i j
i
tehát:
( ) ( )( )2
sin ,
cos
d R tt
t
− ⋅ ω⋅= −ω⋅ ⋅
ω⋅v i ( 41 )
megegyezésben ( 10 ) - zel. ☺ Másodszor: az ( e ), ( 28 ), ( 30 ), ( 32 ) - vel:
( )( )
( ) ( )( )
( )( )
2
2
23
22
sin
cos
1 sin 2 sin
cos
sin 2 ;
cos
d R tR
t
d t R t
t
d t R
t
− ⋅ ω⋅= −ω ⋅ ⋅ + ⋅ + ω⋅
⋅ + ω⋅ − ⋅ ⋅ ω⋅ + ω ⋅ ⋅ −ω⋅
⋅ ω⋅ −− ⋅ω ⋅ ⋅
ω⋅
1 2
2
1
a e e
e
e
( 42 )
csoportosítva:
( )( )
( ) ( )( )
( )( )
( )( )
( )( )
( ) ( )( )
2
2 3 2
2
2 3
1 sin 2 sinsin sin2
cos cos cos
1 sin 2 sinsin sin 2
cos cos cos
d t R td R t d t RR
t t t
d t R td t R d R tR
t t t
⋅ + ω⋅ − ⋅ ⋅ ω⋅ − ⋅ ω⋅ ⋅ ω⋅ − = − ⋅ − ⋅ + ⋅ − ⋅ ⋅ = ω ω⋅ ω⋅ ω⋅
⋅ + ω⋅ − ⋅ ⋅ ω⋅ ⋅ ω⋅ − − ⋅ ω⋅ = ⋅ − − ⋅ + ⋅ − + ω⋅ ω⋅ ω⋅
1 2 2 1
1 2
ae e e e
e e ;
( 43 ) segédjelöléseket bevezetve:
( )( )
( )( )
( ) ( )( )
2
2
3
sin2 ,
cos
1 sin 2 sinsin .
cos cos
d t RA R
t
d t R td R tB
t t
⋅ ω⋅ −= − − ⋅ ω⋅
⋅ + ω⋅ − ⋅ ⋅ ω⋅− ⋅ ω⋅ = − + ω⋅ ω⋅
( 44 )
majd ( 43 ) és ( 44 ) szerint:

16
2 ;A B= ⋅ + ⋅
ω 1 2
ae e ( 45 )
ezután ( 20 ) és ( 45 ) - tel:
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )2
cos sin sin cos
cos sin sin cos ,
A t t B t t
A t B t A t B t
= ⋅ ω⋅ ⋅ + ω⋅ ⋅ + ⋅ − ω⋅ ⋅ + ω⋅ ⋅ = ω = ⋅ ⋅ ω⋅ − ⋅ ω⋅ + ⋅ ⋅ ω⋅ + ⋅ ω⋅
ai j i j
i j
tehát:
( ) ( ) ( ) ( )2cos sin sin cos .A t B t A t B t = ⋅ ⋅ ω⋅ − ⋅ ω⋅ + ⋅ ⋅ ω⋅ + ⋅ ω⋅ ω
ai j ( 46 )
További egyszerűsítő jelölések bevezetésével:
( ) ( )( ) ( )
2 ,
cos sin ,
sin cos .
i j
i
j
S S
S A t B t
S A t B t
= ⋅ + ⋅ ω= ⋅ ω⋅ − ⋅ ω⋅ = ⋅ ω⋅ + ⋅ ω⋅
ai j
( 47 )
Most ( 44 ) és ( 47 / 2 ) - vel: ( ) ( )
( )( ) ( )
( )( )
( ) ( )( ) ( )
( ) ( )( ) ( ) ( )
( ) ( )
2
2
3
2
cos sin
sin2 cos
cos
1 sin 2 sinsinsin
cos cos
sin sincos 2 cos sin
cos cos
1 sin
iS A t B t
d t RR t
t
d t R td R tt
t t
d t R d R tR t t t
t t
d
= ⋅ ω⋅ − ⋅ ω⋅ =
⋅ ω⋅ −= − − ⋅ ⋅ ω⋅ − ω⋅
⋅ + ω⋅ − ⋅ ⋅ ω⋅− ⋅ ω⋅ − − + ⋅ ω⋅ = ω⋅ ω⋅
⋅ ω⋅ − − ⋅ ω⋅= − ⋅ ω⋅ − ⋅ ⋅ ω⋅ + ⋅ ω⋅ −
ω⋅ ω⋅
⋅ +−
( ) ( )( ) ( )
( ) ( )( )
( )( ) ( )
( ) ( )( ) ( )
2
3
2
3
2 sinsin
cos
sin sincos 2 sin
cos cos
1 sin 2 sinsin ;
cos
t R tt
t
d t R d R tR t t
t t
d t R tt
t
ω⋅ − ⋅ ⋅ ω⋅ ⋅ ω⋅ =ω⋅
⋅ ω⋅ − − ⋅ ω⋅= − ⋅ ω⋅ − ⋅ + ⋅ ω⋅ −
ω⋅ ω⋅
⋅ + ω⋅ − ⋅ ⋅ ω⋅ − ⋅ ω⋅ω⋅
folytatva az átalakításokat:

17
( ) ( ) ( ) ( )( )
( ) ( )( ) ( )
( ) ( ) ( ) ( )( )
( ) ( )( ) ( )
2 2
2
3
2 2
2
3
cos 2 sin 2 sin sin
cos
1 sin 2 sinsin
cos
cos sin 2 2 sin sin
cos
1 sin 2 sinsin
cos
sin
i
R t d t R d t R tS
t
d t R tt
t
R t t R d t d t
t
d t R tt
t
R d
− ⋅ ω⋅ − ⋅ ⋅ ω⋅ + ⋅ + ⋅ ω⋅ − ⋅ ω⋅= −
ω⋅
⋅ + ω⋅ − ⋅ ⋅ ω⋅ − ⋅ ω⋅ =ω⋅
− ⋅ ω⋅ + ω⋅ + ⋅ − ⋅ ⋅ ω⋅ + ⋅ ω⋅ = −ω⋅
⋅ + ω⋅ − ⋅ ⋅ ω⋅ − ⋅ ω⋅ =ω⋅
− ⋅=
( )( )
( ) ( ) ( )( )
( ) ( ) ( ) ( ) ( ){ }( )
( ) ( ) ( ) ( ) ( ) ( )( )
( )
2 2
3
2 2 2
3
2 2 3 2
3
2
1 sin sin 2 sin
cos cos
sin cos 1 sin sin 2 sin
cos
cos sin cos sin sin 2 sin
cos
1 sin 2 s
d t t R tt
t t
R d t t d t t R t
t
R t d t t d t d t R t
t
R t
⋅ + ω⋅ ⋅ ω⋅ − ⋅ ⋅ ω⋅ω⋅ − =ω⋅ ω⋅
− ⋅ ω⋅ ⋅ ω⋅ − ⋅ + ω⋅ ⋅ ω⋅ − ⋅ ⋅ ω⋅ = =ω⋅
⋅ ω⋅ − ⋅ ω⋅ ⋅ ω⋅ − ⋅ ω⋅ − ⋅ ω⋅ + ⋅ ⋅ ω⋅= =
ω⋅
⋅ − ω⋅ + ⋅=
( ) ( ) ( ) ( )( )
( ) ( )( )
2 2 2
3
2
3
in sin cos 1 sin
cos
1 sin 2 sin ,
cos
t d t t t
t
R t d t
t
ω⋅ − ⋅ ω⋅ ⋅ ω⋅ + + ω⋅ =ω⋅
⋅ + ω⋅ − ⋅ ⋅ ω⋅ =ω⋅
tehát:
( ) ( )( )
2
3
1 sin 2 sin .
cosi
R t d tS
t
⋅ + ω⋅ − ⋅ ⋅ ω⋅ =ω⋅ ( 48 )
Hasonlóképpen ( 44 ) és ( 47 / 3 ) - mal:
( ) ( )( )
( ) ( )
( )( )
( ) ( )( ) ( )
2
2
3
sin cos
sin2 sin
cos
1 sin 2 sinsincos ;
cos cos
jS A t B t
d t RR t
t
d t R td R tt
t t
= ⋅ ω⋅ + ⋅ ω⋅ =
⋅ ω⋅ −= − − ⋅ ⋅ ω⋅ + ω⋅
⋅ + ω⋅ − ⋅ ⋅ ω⋅− ⋅ ω⋅ + − + ⋅ ω⋅ ω⋅ ω⋅
folytatva az átalakításokat:

18
( ) ( )( ) ( )
( ) ( ) ( )( )
( ) ( ) ( )( ) ( )
( ) ( )( )
( )( )
2
2
2
2
2
2
2
sinsin 2 sin
cos
1 sin 2 sinsin
cos
sinsin sin 2 sin
cos
1 sin 2 sin
cos
sin2 si
cos
j
d t RS R t t
t
d t R td R t
t
d t RR t R t d t
t
d t R t
t
d t Rd
t
⋅ ω⋅ −= − ⋅ ω⋅ − ⋅ ⋅ ω⋅ −
ω⋅
⋅ + ω⋅ − ⋅ ⋅ ω⋅ − − ⋅ ω⋅ + = ω⋅
⋅ ω⋅ −= − ⋅ ω⋅ + ⋅ ω⋅ − − ⋅ ⋅ ω⋅ +
ω⋅
⋅ + ω⋅ − ⋅ ⋅ ω⋅ + =ω⋅
⋅ ω⋅ −= − − ⋅ ⋅
ω⋅( ) ( ) ( )
( )( ) ( ) ( ) ( ) ( )
( )( ) ( ) ( ) ( ) ( )
( )( ) ( )
2
2
2 2 2
2
2 2 2
2
2 2
2
1 sin 2 sinn
cos
cos 2 sin 2 sin sin 2 sin
cos
cos 2 sin 1 sin 2 sin 2 sin
cos
cos 1 sin
cos
d t R tt
t
d t d t R t d d t R t
t
d t t t R t R t
t
d t t
⋅ + ω⋅ − ⋅ ⋅ ω⋅ ω⋅ + =ω⋅
− ⋅ ω⋅ − ⋅ ⋅ ω⋅ + ⋅ ⋅ ω⋅ + + ⋅ ω⋅ − ⋅ ⋅ ω⋅= =
ω⋅
⋅ − ω⋅ − ⋅ ω⋅ + + ω⋅ + ⋅ ⋅ ω⋅ − ⋅ ⋅ ω⋅ = =ω⋅
⋅ − ω⋅ + − ω⋅ =ω⋅( ) 0 ,
t=
tehát:
0 .jS = ( 49 )
Most ( 47 / 1 ), ( 48 ) és ( 49 ) - cel:
( ) ( )( )
2
2 3
1 sin 2 sin0 ,
cosi j
R t d tS S
t
⋅ + ω⋅ − ⋅ ⋅ ω⋅ = ⋅ + ⋅ = ⋅ + ⋅ω ω⋅a
i j i j
innen:
( ) ( ) ( )( )
2
23
2 sin 1 sin ,
cos
d t R tt
t
⋅ ⋅ ω⋅ − ⋅ + ω⋅ = −ω ⋅ ⋅ω⋅
a i ( 50 )
egyezésben ( 16 ) - tal. ☺ Ezzel jelen dolgozatunkat befejeztük, mivel mostanra már az előző dolgozat mind -egyik – korábban esetleg nem eléggé megvilágított – részletére fény derülhetett. Emlékeztetünk arra a sajátos körülményre, hogy ~ a fénypontnak nincs tömege, valamint ~ a fény terjedési sebessége sokkal nagyobb az itteni sebességeknél.

19
Javasoljuk, hogy az Olvasó önállóan végezze el a már többször emlegetett sebesség - és gyorsulásábrák, azaz pillanatképek szerkesztését, a bemutatottak alapján! Itt „puskázni” is lehet – 7. ábra, melyet Hajdu Endrének köszönünk meg.
7. ábra Jó munkát! Irodalom: [ 1 ] – Nagy Károly: Elméleti mechanika Tankönyvkiadó, Budapest, 1985., 65. ~ 67. o. [ 2 ] – L. G. Lojcjanszkij ~ A. I. Lurje: Kursz teoreticseszkoj mehaniki,
Tom I.: Sztatika i kinematika 8. kiadás, Nauka, Moszkva, 1982., 277. o. [ 3 ] – Budó Ágoston: Mechanika 5. kiadás, Tankönyvkiadó, Budapest, 1972, 71. o. [ 4 ] – Szerk.: M. Csizmadia Béla ~ Nándori Ernő: Mechanika mérnököknek Mozgástan Nemzeti Tankönyvkiadó, Budapest, 1997. Összeállította: Galgóczi Gyula mérnöktanár Sződliget, 2014. január 3.