fischertechnick robo tx -...
TRANSCRIPT

Fischertechnick Robo TX
Programación y armado para Fischer RoboTX
Autor Ariel Godoy
Versión 1.2 Fecha 16/07/2013
Ubicación Plan Ceibal – Laboratorios Digitales

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Índice
Introducción.................................................................................................................... 4
Instalación de Flowol4....................................................................................................4
Instalación en XO 1.0 y 1.5.........................................................................................4
Desinstalación en XO 1.0 y 1.5...................................................................................4
Interfaz de Flowol...........................................................................................................6
Barra de Herramientas de Edición..............................................................................6
Barra de Herramientas de Diseño...............................................................................7
Barra de Estado........................................................................................................12
Barra de Control de Ejecución..................................................................................12
Barra de Zoom..........................................................................................................12
Área de Programación..............................................................................................12
Como instalar Robopro:................................................................................................13
Interfaz de RoboPro......................................................................................................16
Barra de menú..........................................................................................................16
Barra de bloques de programación...........................................................................16
Opciones de archivo.................................................................................................19
Eliminar un elemento...............................................................................................19
Controles de ejecución.............................................................................................19
Configuración de la interfaz......................................................................................19
Control de debugging...............................................................................................19
Control de zoom.......................................................................................................19
Área de programación..............................................................................................19
Ejemplos de entrenamiento..........................................................................................20
Luz parpadeante.......................................................................................................21
Listado de piezas..................................................................................................21
Programación.......................................................................................................21
Luz parpadeante con pulsador.................................................................................22
Lista de piezas......................................................................................................22
Programación.......................................................................................................22
Ventilador con botón................................................................................................23
Listado de piezas..................................................................................................23
Programación.......................................................................................................24
MAN.LAB.Flowol4_Fischertechnik Página 2 de 25
Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Ventilador con botón 2.0..........................................................................................24
Problematica.........................................................................................................24
Programación.......................................................................................................25
Control de cambios.......................................................................................................26
Modificaciones..........................................................................................................26
Revisiones................................................................................................................ 26
MAN.LAB.Flowol4_Fischertechnik Página 3 de 25
Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Introducción
El objetivo de este manual es presentar el software que utilizaremos para controlar alkit RoboTX de FischerTechnik. Dicho software es Flowol4, explicaremos sufuncionamiento y luego reafirmaremos los conceptos mediante el uso de algunosejemplos prácticos.
Instalación de Flowol4
Instalación en XO 1.0 y 1.5
Para poder instalar Flowol4 en la XO 1.0 y 1.5 es necesario:
• Estar en el entorno Sugar.
• Abrir la actividad terminal
• Ingresar los siguientes comandos:
wget http://centroceibal:[email protected]/centroceibal/Flowol4.xo
sugar-install-bundle Flowol4.xo
rm Flowol4.xo
• Abrir la actividad Flowol4 en la vista principal
Desinstalación en XO 1.0 y 1.5
Para poder desinstalar Flowol4 en la XO 1.0 y 1.5 es necesario:
• Estar en el entorno Sugar.
• Abrir la actividad terminal
• Ingresar los siguientes comandos:
rm –rf /home/olpc/Activities/Flowol4.activity
MAN.LAB.Flowol4_Fischertechnik Página 4 de 25

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Importante:
Es necesario tener el Controlador encendido y conectado a la máquina para que aliniciar Flowol, éste reconozca el controlador. Al iniciar el programa, se debeseleccionar la opción de “Fischertechnik Robo TX Interface”. Si esta opción no aparece,se debe presionar el botón “Connect to an Interface” para después seleccionar“Fishchertechnik Robo TX Interface”.
MAN.LAB.Flowol4_Fischertechnik Página 5 de 25

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Interfaz de Flowol
Barra de Herramientas de Edición
En esta barra se encuentran los accesos para crear, abrir o guardar un archivo, comotambién para cortar, copiar, pegar, eliminar, deshacer y rehacer (en ese orden), sobrelos elementos de programación.
MAN.LAB.Flowol4_Fischertechnik Página 6 de 25
Barra de Herramientas de Edición
Barra de Herramientas de Diseño
Barra de Control de Ejecucción
Barra de Estado
Barra de Zoom
Área de Programación
Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
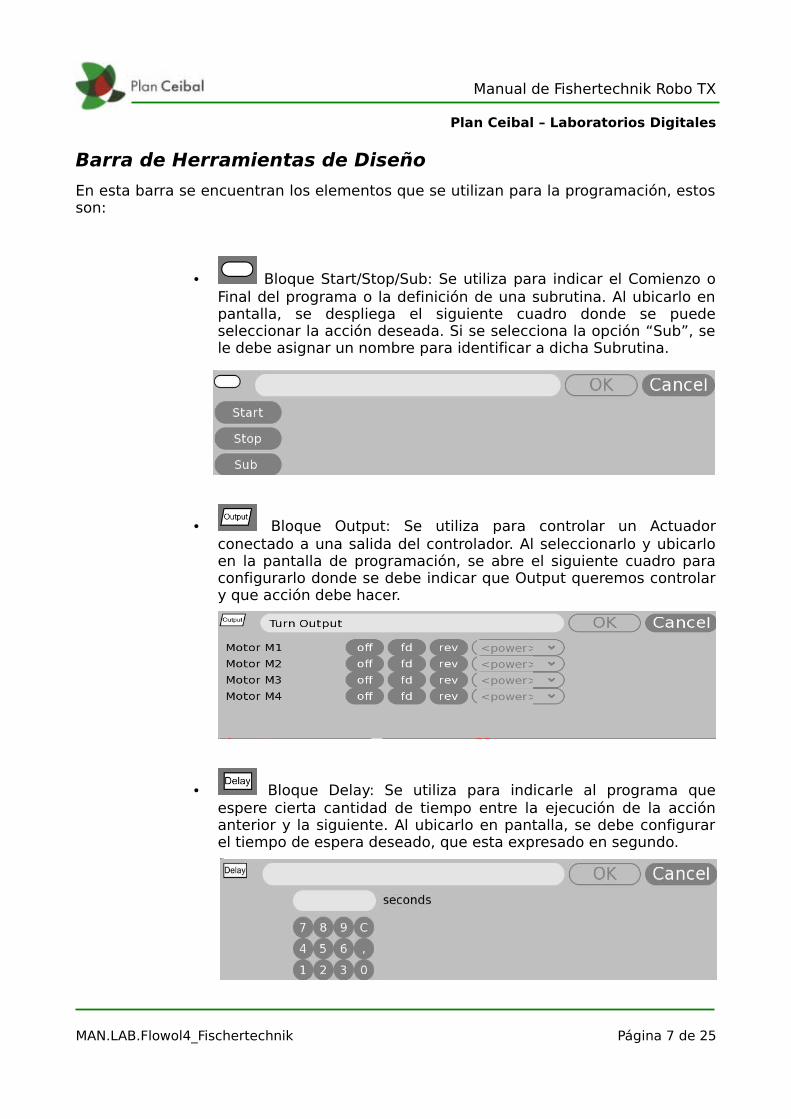
Barra de Herramientas de Diseño
En esta barra se encuentran los elementos que se utilizan para la programación, estosson:
• Bloque Start/Stop/Sub: Se utiliza para indicar el Comienzo oFinal del programa o la definición de una subrutina. Al ubicarlo enpantalla, se despliega el siguiente cuadro donde se puedeseleccionar la acción deseada. Si se selecciona la opción “Sub”, sele debe asignar un nombre para identificar a dicha Subrutina.
• Bloque Output: Se utiliza para controlar un Actuadorconectado a una salida del controlador. Al seleccionarlo y ubicarloen la pantalla de programación, se abre el siguiente cuadro paraconfigurarlo donde se debe indicar que Output queremos controlary que acción debe hacer.
• Bloque Delay: Se utiliza para indicarle al programa queespere cierta cantidad de tiempo entre la ejecución de la acciónanterior y la siguiente. Al ubicarlo en pantalla, se debe configurarel tiempo de espera deseado, que esta expresado en segundo.
MAN.LAB.Flowol4_Fischertechnik Página 7 de 25

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
• Bloque Let: Éste bloque aparece en la barra cuando seactivan las variables (presionando el botón XY de la barra deEstado) y se utiliza para manejar las variables, ya sea paraasignarle un valor, o modificar el valor ya existente. Cuando seubica en pantalla, se abre el siguiente cuadro para configurar laoperación que se desee realizar.
• Bloque de Subrutinas: Se utiliza para llamar una subrutinaya definida mediante el bloque Start/Stop/Sub y asignarle lacantidad de veces que se desea repetir. Cuando se completan lasrepeticiones deseadas de la subrutina, continúa el procedimientoque llamo a dicha subrutina. Para que aparezca este bloque en labarra se debe haber definido por lo menos una subrutina. Alcolocar el bloque en pantalla, se abre el siguente cuadro para suconfiguración.
MAN.LAB.Flowol4_Fischertechnik Página 8 de 25

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
• Bloque Decisión: Éste bloque se utiliza para expresar unapregunta con respuesta de si (YES) o no (NO). Si la respuesta es Si(YES) entonces se elige un camino y si la respuesta es no (NO), seelige otro. Los bloques de decisión se usan para chequear el estadode un Sensor, o el valor de una variable. Los caminos para ambasrespuestas deben estar definidos para todo bloque de decisión. Alser ubicado en pantalla se despliega el siguiente cuadro donde sepodrá configurar la pregunta deseada.
• Texto: La herramienta de texto se utiliza para agregar unaetiqueta en el diagrama de flujo (programa).
• Seleccionar: Se utiliza para seleccionar los elementos deldiagrama de flujo (uno o varios). Al seleccionar un elemento, sevuelve a abrir el cuadro de configuración lo que permitirá editar elelemento seleccionado. También se podrán mover los elementosseleccionado (cuando un bloque se mueve, también se moveránlas líneas conectadas a él).
• Flujo: La herramienta de flujo se utiliza para conectarbloques entre ellos y así definir el flujo del programa. Todos losbloques, excepto el de Stop, necesitan una línea que salga de ellos(el de decisión, necesitará 2, una para Si y otra para No) paraindicar como sigue el procedimiento. Para agregar una línea, seselecciona la flecha y se clickea primero en el bloque de origen yluego en el bloque de destino de la misma.
MAN.LAB.Flowol4_Fischertechnik Página 9 de 25

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Barra de Estado
La Barra de Estado muestra el estado de todas las Inputs, Outputs yvariables (para poder ver estas últimas se debe accionar el botónXY que se encuentra arriba de la barra). Permite cambiar el nombrede cualquiera de estos elementos chequear su estado.
Barra de Control de Ejecución
En esta barra se encuentras las opciones de control de ejecución del programa:Iniciarlo, Detenerlo, Ajustar la Velocidad de Flujo, Pausarlo y Ejecutarlo Paso a Paso.
Barra de Zoom
Ajusta el tamaño de los elementos en el área de programación.
Área de Programación
Es el área donde se colocaran los elementos para realizar la programación.
MAN.LAB.Flowol4_Fischertechnik Página 10 de 25

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Como instalar Robopro:
RoboPro es el software que utilizaremos desde Windows para trabajar con el kit ROBOLT.
Dentro de la carpeta RoboPro buscamos el archivo Setup y le damos doble click.
Se nos abrirá una ventana donde haremos click en Siguiente, dando lugar al acuerdode licencia, en el cual haremos click en Si para que se active el botón siguiente, el cualpresionaremos.
MAN.LAB.Flowol4_Fischertechnik Página 11 de 25

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
La próxima ventana es la de información de usuario, podemos dejarla en blanco ypresionar siguiente, abriéndose la ventana de selección de tipo de instalación,comprobamos que esté seleccionada la instalación express y presionamos siguiente.
MAN.LAB.Flowol4_Fischertechnik Página 12 de 25

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Se nos abrirá la ventana de Directorio de instalación, el cual podemos cambiar en Rutasi así lo deseamos, elegimos que usuarios de nuestro equipo utilizaran RoboPro (si elequipo no tiene más que un usuario creado en el sistema esto es indiferente) ypresionamos siguiente, con lo cual se nos abrirá la última ventana en la cual alpresionar Finalizar se procederá a realizar la instalación.
Luego de un momento se nos mostrará el siguiente mensaje:
Con lo cual damos por finalizada la instalación de RoboPro.
MAN.LAB.Flowol4_Fischertechnik Página 13 de 25

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Interfaz de RoboPro
Barra de menú
Aquí se encuentran los elementos de menú con los que podemos controlar diferentesaspectos de manejo del programa.
Barra de bloques de programación
Aqui se encuentran los bloques que colocaremos en el area de programación, con loscuales describiremos el comportamiento de nuestro programa, estos variandependiendo del nivel de complejidad seleccionado en el menu. En el modoprincipiantes (que es el que utilizaremos en este manual) los bloques mas importantesson:
• Bloque de inicio: Se utiliza para indicar el comienzo del programa
• Bloque de fin: Se utiliza para indicar el findel programa
MAN.LAB.Flowol4_Fischertechnik Página 14 de 25
Barra de bloques de
programación
Opciones de archivo
Barra de bloques de
programaciónÁrea de
programación
Controles de ejecución
Configuración de la interfaz
Control de debugging
Control de zoom
Eliminar un elemento
Barra de menú

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
• Bloque de bifurcación digital: se utiliza para consultar sobre elestado de un sensor que mida valores digitales (0 o 1) y en base al resultadopoder decidir el flujo de nuestro programa. Al darle click derecho se abre elsiguiente cuadro de configuración:
En el mismo podemos seleccionar en que entrada del controlador estaconectado el sensor, que tipo de sensor es (esto es para que cambie eldibujo en el bloque) y si queremos dejar las conexiones del bloque comoestán (1/0) o invertirlas (0/1) con lo que invertimos la lógica del flujo.
• Bloque de bifurcación analógica: se utiliza para consultar sobre el valorde un sensor que mida valores analógicos (rangos de valores, por lo tantoevalua con operadores <,>,<>,=,<=,>=) y en base al resultado poder decidirel flujo de nuestro programa. Al darle click derecho se abre el siguiente cuadrode configuración.
MAN.LAB.Flowol4_Fischertechnik Página 15 de 25

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
En el mismo podemos seleccionar en que entrada del controlador estaconectado el sensor, que tipo de sensor es (esto es para que cambie eldibujo en el bloque) y si queremos dejar las conexiones del bloque comoestán (S/N) o invertirlas (N/S) con lo que invertimos la lógica del flujo.
• Bloque de espera: pone el programa en pausa durante el tiempoespecificado. Al hacer click derecho sobre el se abre el siguiente cuadro deconfiguración:
Donde podemos definir la unidad de tiempo y cuál será la duración de la espera(la cual acepta valores decimales).
• Bloque de salida de motor: este bloque indica acciones que se
corresponden a las acciones de actuadores (motor XS, motor codificador,lampara incandescente y lampara con lente). Al hacer click derecho sobre el seabre el siguiente cuadro de configuración:
MAN.LAB.Flowol4_Fischertechnik Página 16 de 25

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Aquí podemos seleccionar en que entrada de controlador esta conectado elactuador, la potencia en la que se encenderá (entre 1 y 8), el sentido de lacorriente y la imágen del actuador que esta conectado.
• Bloques de texto: sirven para colocar comentarios en el código.
Opciones de archivo
Aquí tenemos las opciones de crear un archivo nuevo, abrir unocreado anteriormente o guardar el actual.
Eliminar un elemento
Una vez seleccionada esta herramienta podemos eliminar cualquierelemento del área de programación con hacer un click encima.
Controles de ejecución
Aquí tenemos los controles para inciar la ejecución del programa, detenerla odescargar el mismo a la interfaz RoboTX.
Configuración de la interfaz
Aquí podemos seleccionar el tipo de puerto en el que conectaremos el controlador, eltipo de controlador y además podemos acceder a la ventana de prueba de conexiones,la cual podemos utilizar para testear si las conexiones de actuadores y sensores ennuestro robot fueron realizadas correctamente.
Control de debugging
Aquí podemos controlar la ejecución de nuestro programa en modo debugging(depuración), iniciar la ejecución, pausarla y ejecutar paso a paso.
MAN.LAB.Flowol4_Fischertechnik Página 17 de 25

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Control de zoom
Aquí podemos decidir aumentar o reducir el tamaño de los elementos en el área deprogramación.
Área de programación
Aquí crearemos nuestro programa uniendo los distintos bloques presentadosanteriormente.
MAN.LAB.Flowol4_Fischertechnik Página 18 de 25

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Ejemplos de entrenamiento
Nota: Para todos los casos, utilizaremos el controlador, la batería y cables armados de15cm.
MAN.LAB.Flowol4_Fischertechnik Página 19 de 25
Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
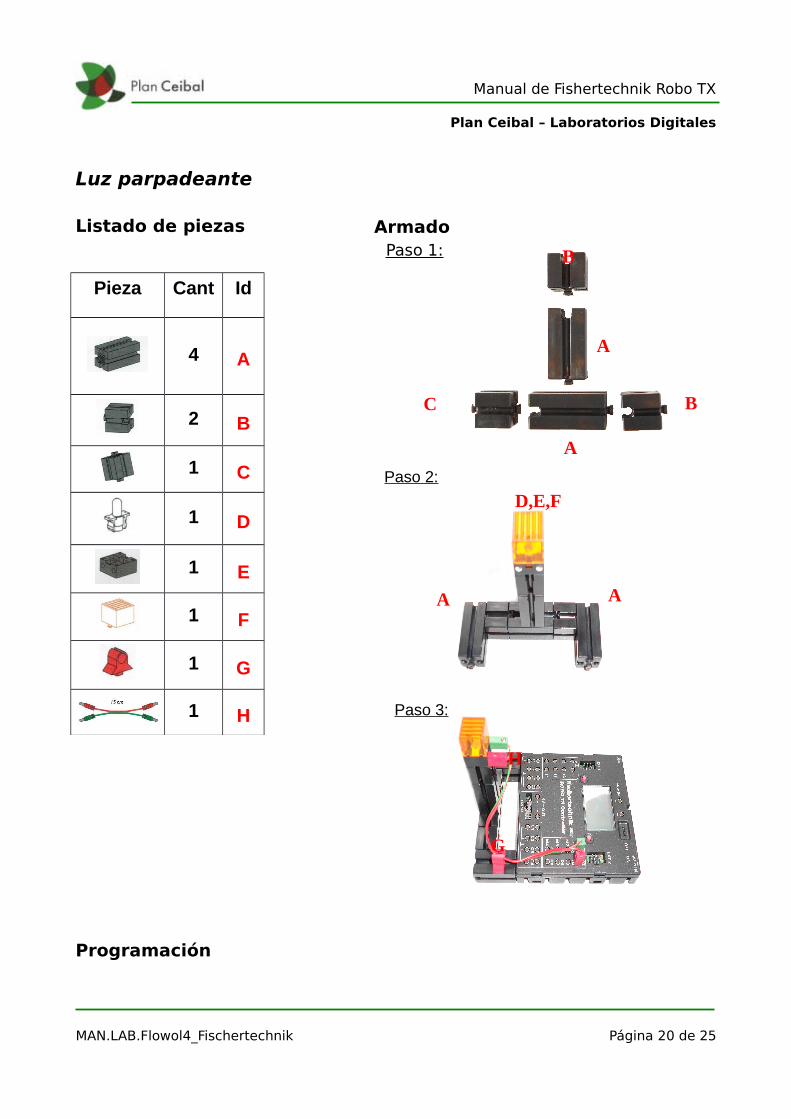
Luz parpadeante
Listado de piezas
Pieza Cant Id
4 A
2 B
1 C
1 D
1 E
1 F
1 G
1 H
Programación
MAN.LAB.Flowol4_Fischertechnik Página 20 de 25
H
B
A
B
A A
D,E,F
A
C
Paso 1:
Paso 3:
Armado
Paso 2:
G

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Se desea programar una luz parpadeante, para ello encendemos la luz al comenzar elprograma, luego pasamos a un bloque de espera de 0,5 segundos para despuésapagar la luz y esperar nuevamente 0,5 segundos para repetir el procedimiento porsiempre.
Luz parpadeante con pulsador
Al modelo anterior le agregamos las piezas listadas a continuación:
Lista de piezas
Pieza Cant Id
1 A
1 B
MAN.LAB.Flowol4_Fischertechnik Página 21 de 25
B
A

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Programación
Se desea programar la luz parpadeante pero que la secuencia se ejecute mientras se estapresionando el pulsador. Para ello, a la programación anterior, le agregamos un bloque dedecisión y preguntamos si el pulsador está presionado. En caso de ser afirmativo, realizamos lasecuencia y volvemos a preguntar, en caso de ser negativo, simplemente volvemos a preguntar.
Ventilador con botón
En este modelo partimos del anterior, sustituyendo la lámpara por el motor XS (A)creando un ventilador con las piezas B y C
Listado de piezas
Pieza Cant Id
1 A
1 B
1 C
MAN.LAB.Flowol4_Fischertechnik Página 22 de 25
A
BC

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Programación
Se desea programar un ventilador que, alpresionarse el pulsador, se encienda y alvolver a presionarlo, se apague. Para ellodefinimos una variable x que, si elventilador está apagado, tiene valor '0' y siesta encendido, tiene valor '1'. Por eso,luego del bloque de decisión para saber sise presiono el pulsador, preguntamos elestado de la variable x. Si su valor es '1'(elventilador está encendido), le asignamos elvalor '0' a x y apagamos el ventilador, si suvalor es '0'(el ventilador esta apagado), leasignamos el valor '1' a x y encendemos elventilador. En ambos casos, volvemos apreguntar si se presiono el pulsador pararepetir las secuencias.
Aquí tenemos una programación alternativa, sin utilizar la variable (y en robopro)donde una vez que el motor se encendió sabemos que la próxima pregunta sobre elestado del interruptor será para apagarlo.
MAN.LAB.Flowol4_Fischertechnik Página 23 de 25

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Ventilador con botón 2.0
Problematica
Con la programación anterior, se presenta el problema de que, si se mantienepresionado el botón, el ventilador se prende y se apaga continuamente. Parasolucionar dicho problema, comprobamos el cambio de “presionado” a “nopresionado” antes de encender o apagar el motor.
Programación
Agregando un bloque de decisión que espere a que el pulsador no este presionadopara seguir con el flujo del programa, entre el bloque de decisión del pulsador y elbloque de decisión de la variable x existentes en la programación anterior, se lograsolucionar la problemática planteada.
De la misma forma, al consultarnuevamente por el estado delpulsador pero con la lógicainversa solucionamos elproblema anterior, en este casosin usar las variables.
MAN.LAB.Flowol4_Fischertechnik Página 24 de 25

Manual de Fishertechnik Robo TX
Plan Ceibal – Laboratorios Digitales
Control de cambios
Modificaciones
Fecha Versión Modificaciones realizadas
Revisiones
Realizado por:
Ariel Godoy Revisado por:
Aprobado por:
Fecha: 16/07/2013 Fecha: Fecha:
Firma: Firma: Firma:
MAN.LAB.Flowol4_Fischertechnik Página 25 de 25