first-order extensions of classical modal logicfitelson.org/few/pacuit_slides.pdf · first-order...
TRANSCRIPT
First-Order Extensions ofClassical Modal Logic
Eric Pacuit
University of Maryland, College ParkTilburg Institute for Logic and Philosophy of Science
ai.stanford.edu/~epacuit
June 2, 2012
Eric Pacuit: First-Order Extensions of Classical Modal Logic 1/62

Horacio’s Neighborhood
Horacio Arlo-Costa (2002). First Order Extensions of Classical Systems of ModalLogic: The role of the Barcan Schemas. Studia Logica, 71:1, pgs. 87 - 118.
Horacio Arlo-Costa (2005). Non-Adjunctive Inference and Classical Modalities.Journal of Philosophical Logic, 34:5, pgs. 581 - 605.
Horacio Arlo-Costa and EP (2006). First-Order Classical Modal Logic. HoracioArlo-Costa and Eric Pacuit, Studia Logica, Volume 84:2, pgs. 171 - 210.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 2/62

Plan
1. Background
• Neighborhood Semantics for Propositional Modal Logic
• First-Order Modal Logic
• The Barcan Formula
2. Neighborhood Models for First-Order Modal Logic
H. Arlo-Costa and E. Pacuit. First-Order Classical Modal Logic. Studia Logica,84, pgs. 171 - 210 (2006).
4. General Frames for First-Order Modal Logic
R. Goldblatt and E. Mares. A General Semantics for Quantified Modal Logic.AiML, 2006.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 3/62
Plan
1. Background
• Neighborhood Semantics for Propositional Modal Logic
• First-Order Modal Logic
• The Barcan Formula
2. Neighborhood Models for First-Order Modal Logic
H. Arlo-Costa and E. Pacuit. First-Order Classical Modal Logic. Studia Logica,84, pgs. 171 - 210 (2006).
4. General Frames for First-Order Modal Logic
R. Goldblatt and E. Mares. A General Semantics for Quantified Modal Logic.AiML, 2006.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 3/62

Brief History
w |= �ϕ if the truth set of ϕ is a neighborhood of w
neighborhood in some topology.J. McKinsey and A. Tarski. The Algebra of Topology. 1944.
contains all the immediate neighbors in some graphS. Kripke. A Semantic Analysis of Modal Logic. 1963.
an element of some distinguished collection of setsD. Scott. Advice on Modal Logic. 1970.
R. Montague. Pragmatics. 1968.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 4/62

Brief History
w |= �ϕ if the truth set of ϕ is a neighborhood of w
What does it mean to be a neighborhood?
neighborhood in some topology.J. McKinsey and A. Tarski. The Algebra of Topology. 1944.
contains all the immediate neighbors in some graphS. Kripke. A Semantic Analysis of Modal Logic. 1963.
an element of some distinguished collection of setsD. Scott. Advice on Modal Logic. 1970.
R. Montague. Pragmatics. 1968.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 4/62
Brief History
w |= �ϕ if the truth set of ϕ is a neighborhood of w
neighborhood in some topology.J. McKinsey and A. Tarski. The Algebra of Topology. 1944.
contains all the immediate neighbors in some graphS. Kripke. A Semantic Analysis of Modal Logic. 1963.
an element of some distinguished collection of setsD. Scott. Advice on Modal Logic. 1970.
R. Montague. Pragmatics. 1968.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 4/62

Brief History
w |= �ϕ if the truth set of ϕ is a neighborhood of w
neighborhood in some topology.J. McKinsey and A. Tarski. The Algebra of Topology. 1944.
contains all the immediate neighbors in some graphS. Kripke. A Semantic Analysis of Modal Logic. 1963.
an element of some distinguished collection of setsD. Scott. Advice on Modal Logic. 1970.
R. Montague. Pragmatics. 1968.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 4/62

Brief History
w |= �ϕ if the truth set of ϕ is a neighborhood of w
neighborhood in some topology.J. McKinsey and A. Tarski. The Algebra of Topology. 1944.
contains all the immediate neighbors in some graphS. Kripke. A Semantic Analysis of Modal Logic. 1963.
an element of some distinguished collection of setsD. Scott. Advice on Modal Logic. 1970.
R. Montague. Pragmatics. 1968.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 4/62

Brief History
Classical Modal Logic
To see the necessity of the more general approach, wecould consider probability operators, conditional necessity,or, to invoke an especially perspicuous example of DanaScott, the present progressive tense....Thus N mightreceive the awkward reading ‘it is being the case that’, inthe sense in which ‘it is being the case that Jones leaves’is synonymous with ‘Jones is leaving’. (Montague, 1970)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 5/62

Brief History
PC Propositional Calculus
E �ϕ↔ ¬♦¬ϕM �(ϕ ∧ ψ)→ (�ϕ ∧�ψ)
C (�ϕ ∧�ψ)→ �(ϕ ∧ ψ)
N �>K �(ϕ→ ψ)→ (�ϕ→ �ψ)
REϕ↔ ψ
�ϕ↔ �ψ
Necϕ
�ϕ
MPϕ ϕ→ ψ
ψ
Eric Pacuit: First-Order Extensions of Classical Modal Logic 6/62

Brief History
PC Propositional Calculus
E �ϕ↔ ¬♦¬ϕM �(ϕ ∧ ψ)→ (�ϕ ∧�ψ)
C (�ϕ ∧�ψ)→ �(ϕ ∧ ψ)
N �>K �(ϕ→ ψ)→ (�ϕ→ �ψ)
REϕ↔ ψ
�ϕ↔ �ψ
Necϕ
�ϕ
MPϕ ϕ→ ψ
ψ
A modal logic L is classical if itcontains all instances of E and isclosed under RE .
Eric Pacuit: First-Order Extensions of Classical Modal Logic 6/62

Brief History
PC Propositional Calculus
E �ϕ↔ ¬♦¬ϕM �(ϕ ∧ ψ)→ (�ϕ ∧�ψ)
C (�ϕ ∧�ψ)→ �(ϕ ∧ ψ)
N �>K �(ϕ→ ψ)→ (�ϕ→ �ψ)
REϕ↔ ψ
�ϕ↔ �ψ
Necϕ
�ϕ
MPϕ ϕ→ ψ
ψ
A modal logic L is classical if itcontains all instances of E and isclosed under RE .
E is the smallest classical modallogic.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 6/62
Brief History
PC Propositional Calculus
E �ϕ↔ ¬♦¬ϕM �(ϕ ∧ ψ)→ (�ϕ ∧�ψ)
C (�ϕ ∧�ψ)→ �(ϕ ∧ ψ)
N �>K �(ϕ→ ψ)→ (�ϕ→ �ψ)
REϕ↔ ψ
�ϕ↔ �ψ
Necϕ
�ϕ
MPϕ ϕ→ ψ
ψ
E is the smallest classical modallogic.
In E, M is equivalent to
(Mon)ϕ→ ψ
�ϕ→ �ψ
Eric Pacuit: First-Order Extensions of Classical Modal Logic 6/62

Brief History
PC Propositional Calculus
E �ϕ↔ ¬♦¬ϕ
Monϕ→ ψ
�ϕ→ �ψC (�ϕ ∧�ψ)→ �(ϕ ∧ ψ)
N �>K �(ϕ→ ψ)→ (�ϕ→ �ψ)
REϕ↔ ψ
�ϕ↔ �ψ
Necϕ
�ϕ
MPϕ ϕ→ ψ
ψ
E is the smallest classical modallogic.
EM is the logic E + Mon
Eric Pacuit: First-Order Extensions of Classical Modal Logic 6/62

Brief History
PC 6. Propositional Calculus
E �ϕ↔ ¬♦¬ϕ
Monϕ→ ψ
�ϕ→ �ψC (�ϕ ∧�ψ)→ �(ϕ ∧ ψ)
N �>K �(ϕ→ ψ)→ (�ϕ→ �ψ)
REϕ↔ ψ
�ϕ↔ �ψ
Necϕ
�ϕ
MPϕ ϕ→ ψ
ψ
E is the smallest classical modallogic.
EM is the logic E + Mon
EC is the logic E + C
Eric Pacuit: First-Order Extensions of Classical Modal Logic 6/62

Brief History
PC Propositional Calculus
E �ϕ↔ ¬♦¬ϕ
Monϕ→ ψ
�ϕ→ �ψC (�ϕ ∧�ψ)→ �(ϕ ∧ ψ)
N �>K �(ϕ→ ψ)→ (�ϕ→ �ψ)
REϕ↔ ψ
�ϕ↔ �ψ
Necϕ
�ϕ
MPϕ ϕ→ ψ
ψ
E is the smallest classical modallogic.
EM is the logic E + Mon
EC is the logic E + C
EMC is the smallest regularmodal logic
Eric Pacuit: First-Order Extensions of Classical Modal Logic 6/62

Brief History
PC Propositional Calculus
E �ϕ↔ ¬♦¬ϕ
Monϕ→ ψ
�ϕ→ �ψC (�ϕ ∧�ψ)→ �(ϕ ∧ ψ)
N �>K �(ϕ→ ψ)→ (�ϕ→ �ψ)
REϕ↔ ψ
�ϕ↔ �ψ
Necϕ
�ϕ
MPϕ ϕ→ ψ
ψ
E is the smallest classical modallogic.
EM is the logic E + Mon
EC is the logic E + C
EMC is the smallest regularmodal logic
A logic is normal if it contains allinstances of E , C and is closedunder Mon and Nec
Eric Pacuit: First-Order Extensions of Classical Modal Logic 6/62

Brief History
PC Propositional Calculus
E �ϕ↔ ¬♦¬ϕ
Monϕ→ ψ
�ϕ→ �ψC (�ϕ ∧�ψ)→ �(ϕ ∧ ψ)
N �>K �(ϕ→ ψ)→ (�ϕ→ �ψ)
REϕ↔ ψ
�ϕ↔ �ψ
Necϕ
�ϕ
MPϕ ϕ→ ψ
ψ
E is the smallest classical modallogic.
EM is the logic E + Mon
EC is the logic E + C
EMC is the smallest regularmodal logic
K is the smallest normal modallogic
Eric Pacuit: First-Order Extensions of Classical Modal Logic 6/62

Brief History
PC Propositional Calculus
E �ϕ↔ ¬♦¬ϕ
Monϕ→ ψ
�ϕ→ �ψC (�ϕ ∧�ψ)→ �(ϕ ∧ ψ)
N �>K �(ϕ→ ψ)→ (�ϕ→ �ψ)
REϕ↔ ψ
�ϕ↔ �ψ
Necϕ
�ϕ
MPϕ ϕ→ ψ
ψ
E is the smallest classical modallogic.
EM is the logic E + Mon
EC is the logic E + C
EMC is the smallest regularmodal logic
K = EMCN
Eric Pacuit: First-Order Extensions of Classical Modal Logic 6/62

Brief History
PC Propositional Calculus
E �ϕ↔ ¬♦¬ϕ
Monϕ→ ψ
�ϕ→ �ψC (�ϕ ∧�ψ)→ �(ϕ ∧ ψ)
N �>K �(ϕ→ ψ)→ (�ϕ→ �ψ)
REϕ↔ ψ
�ϕ↔ �ψ
Necϕ
�ϕ
MPϕ ϕ→ ψ
ψ
E is the smallest classical modallogic.
EM is the logic E + Mon
EC is the logic E + C
EMC is the smallest regularmodal logic
K = PC (+E ) + K + Nec + MP
Eric Pacuit: First-Order Extensions of Classical Modal Logic 6/62

Brief History
R. Goldblatt. Mathematical Modal Logic: A View of its Evolution. Handbookof the History of Logic, 2005.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 7/62

Motivating Examples
Logics of High Probability
�ϕ means “ϕ is assigned ‘high’ probability”, where high meansabove some threshold r ∈ (12 , 1].
Claim: Mon is a valid rule of inference.
Claim: C is not valid.
H. Kyburg and C.M. Teng. The Logic of Risky Knowledge. Proceedings ofWoLLIC (2002).
A. Herzig. Modal Probability, Belief, and Actions. Fundamenta Informaticae(2003).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 8/62

Motivating Examples
Logics of High Probability
�ϕ means “ϕ is assigned ‘high’ probability”, where high meansabove some threshold r ∈ (12 , 1].
Claim: Mon is a valid rule of inference.
Claim: C is not valid.
H. Kyburg and C.M. Teng. The Logic of Risky Knowledge. Proceedings ofWoLLIC (2002).
A. Herzig. Modal Probability, Belief, and Actions. Fundamenta Informaticae(2003).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 8/62

Motivating Examples
Logics of High Probability
�ϕ means “ϕ is assigned ‘high’ probability”, where high meansabove some threshold r ∈ (12 , 1].
Claim: Mon is a valid rule of inference.
Claim: C is not valid.
H. Kyburg and C.M. Teng. The Logic of Risky Knowledge. Proceedings ofWoLLIC (2002).
A. Herzig. Modal Probability, Belief, and Actions. Fundamenta Informaticae(2003).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 8/62

Motivating Examples
Logics of High Probability
�ϕ means “ϕ is assigned ‘high’ probability”, where high meansabove some threshold r ∈ (12 , 1].
Claim: Mon is a valid rule of inference.
Claim: C is not valid.
H. Kyburg and C.M. Teng. The Logic of Risky Knowledge. Proceedings ofWoLLIC (2002).
A. Herzig. Modal Probability, Belief, and Actions. Fundamenta Informaticae(2003).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 8/62

Motivating Examples
Neighborhood Frames
Let W be a non-empty set of states.
Any map N : W → ℘(℘(W )) is called a neighborhood function
A pair 〈W ,N〉 is a called a neighborhood frame if W a non-emptyset and N is a neighborhood function.
A neighborhood model is a tuple 〈W ,N,V 〉 where V : At→ ℘(W )is a valuation function and 〈W ,N〉 is a neighborhood frame.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 9/62
Motivating Examples
Truth in a Model
I M,w |= p iff w ∈ V (p)
I M,w |= ¬ϕ iff M,w 6|= ϕ
I M,w |= ϕ ∧ ψ iff M,w |= ϕ and M,w |= ψ
I M,w |= �ϕ iff (ϕ)M ∈ N(w)
I M,w |= ♦ϕ iff W − (ϕ)M 6∈ N(w)
where (ϕ)M = {w | M,w |= ϕ}.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 10/62

Motivating Examples
Truth in a Model
I M,w |= p iff w ∈ V (p)
I M,w |= ¬ϕ iff M,w 6|= ϕ
I M,w |= ϕ ∧ ψ iff M,w |= ϕ and M,w |= ψ
I M,w |= �ϕ iff (ϕ)M ∈ N(w)
I M,w |= ♦ϕ iff W − (ϕ)M 6∈ N(w)
where (ϕ)M = {w | M,w |= ϕ}.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 10/62

Motivating Examples
Validities
(Dual) �ϕ↔ ¬♦¬ϕ is valid in all neighborhood models.
(Re) If ϕ↔ ψ is valid then �ϕ↔ �ψ is valid.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 11/62

Motivating Examples
Horacio’s Possibility
M,w |= �ϕ iff (ϕ)M ∈ N(w)
M,w |= ♦ϕ iff W − (ϕ)M 6∈ N(w)
M,w |= �ϕ iff there is an X ∈ N(w) such that for all v ∈W ,v ∈ X iff M, v |= ϕ
I M,w |= 〈 〉ϕ iff ∃X ∈ N(w) such that ∃v ∈ X , M, v |= ϕ
I M,w |= [ ]ϕ iff ∀X ∈ N(w) such that ∀v ∈ X , M, v |= ϕ
I M,w |= 〈 ]ϕ iff ∃X ∈ N(w) such that ∀v ∈ X , M, v |= ϕ
I M,w |= [ 〉ϕ iff ∀X ∈ N(w) such that ∃v ∈ X , M, v |= ϕ
Eric Pacuit: First-Order Extensions of Classical Modal Logic 12/62

Motivating Examples
Horacio’s Possibility
M,w |= �ϕ iff (ϕ)M ∈ N(w)
M,w |= ♦ϕ iff W − (ϕ)M 6∈ N(w)
M,w |= �ϕ iff there is an X ∈ N(w) such that for all v ∈W ,v ∈ X iff M, v |= ϕ
I M,w |= 〈 〉ϕ iff ∃X ∈ N(w) such that ∃v ∈ X , M, v |= ϕ
I M,w |= [ ]ϕ iff ∀X ∈ N(w) such that ∀v ∈ X , M, v |= ϕ
I M,w |= 〈 ]ϕ iff ∃X ∈ N(w) such that ∀v ∈ X , M, v |= ϕ
I M,w |= [ 〉ϕ iff ∀X ∈ N(w) such that ∃v ∈ X , M, v |= ϕ
Eric Pacuit: First-Order Extensions of Classical Modal Logic 12/62
Motivating Examples
Horacio’s Possibility
M,w |= �ϕ iff (ϕ)M ∈ N(w)
M,w |= ♦ϕ iff W − (ϕ)M 6∈ N(w)
M,w |= �ϕ iff there is an X ∈ N(w) such that for all v ∈W ,v ∈ X iff M, v |= ϕ
I M,w |= 〈 〉ϕ iff ∃X ∈ N(w) such that ∃v ∈ X , M, v |= ϕ
I M,w |= [ ]ϕ iff ∀X ∈ N(w) such that ∀v ∈ X , M, v |= ϕ
I M,w |= 〈 ]ϕ iff ∃X ∈ N(w) such that ∀v ∈ X , M, v |= ϕ
I M,w |= [ 〉ϕ iff ∀X ∈ N(w) such that ∃v ∈ X , M, v |= ϕ
Eric Pacuit: First-Order Extensions of Classical Modal Logic 12/62

Motivating Examples
Horacio’s Possibility
M,w |= �ϕ iff (ϕ)M ∈ N(w)
M,w |= ♦ϕ iff W − (ϕ)M 6∈ N(w)
M,w |= �ϕ iff there is an X ∈ N(w) such that for all v ∈W ,v ∈ X iff M, v |= ϕ
I M,w |= 〈 〉ϕ iff ∃X ∈ N(w) such that ∃v ∈ X , M, v |= ϕ
I M,w |= [ ]ϕ iff ∀X ∈ N(w) such that ∀v ∈ X , M, v |= ϕ
I M,w |= 〈 ]ϕ iff ∃X ∈ N(w) such that ∀v ∈ X , M, v |= ϕ
I M,w |= [ 〉ϕ iff ∀X ∈ N(w) such that ∃v ∈ X , M, v |= ϕ
Eric Pacuit: First-Order Extensions of Classical Modal Logic 12/62

Motivating Examples
Horacio’s Possibility
M,w |= �ϕ iff (ϕ)M ∈ N(w)
M,w |= ♦ϕ iff W − (ϕ)M 6∈ N(w)
M,w |= �ϕ iff there is an X ∈ N(w) such that for all v ∈W ,v ∈ X iff M, v |= ϕ
I M,w |= 〈 〉ϕ iff ∃X ∈ N(w) such that ∃v ∈ X , M, v |= ϕ
I M,w |= [ ]ϕ iff ∀X ∈ N(w) such that ∀v ∈ X , M, v |= ϕ
I M,w |= 〈 ]ϕ iff ∃X ∈ N(w) such that ∀v ∈ X , M, v |= ϕ
I M,w |= [ 〉ϕ iff ∀X ∈ N(w) such that ∃v ∈ X , M, v |= ϕ
Eric Pacuit: First-Order Extensions of Classical Modal Logic 12/62

Motivating Examples
Other Examples, I
Reasoning about abilities
M. Brown. On the Logic of Ability. Journal of Philosophical Logic, 17, p. 1 -26 (1988).
Reasoning about games
R. Parikh. The Logic of Games and its Applications. Annals of Discrete Mathe-matics (1985).
Reasoning about coalitions
M. Pauly. Logic for Social Software. Ph.D. Thesis, ILLC (2001).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 13/62
Motivating Examples
Other Examples, II
Epistemic Logic: the logical omniscience problem.
M. Vardi. On Epistemic Logic and Logical Omniscience. TARK (1986).
Reasoning about evidence and beliefs (and how they change overtime)
J. van Benthem and EP. Dynamics of Evidence-Based Beliefs. Studia Logica,2011.
J. van Benthem, D. Fernandez-Duque, EP. Evidence Logic: A New Look andNeighborhood Structures. Advances in Modal Logic, 2012.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 14/62
Motivating Examples
Other Examples, II
Epistemic Logic: the logical omniscience problem.
M. Vardi. On Epistemic Logic and Logical Omniscience. TARK (1986).
Reasoning about evidence and beliefs (and how they change overtime)
J. van Benthem and EP. Dynamics of Evidence-Based Beliefs. Studia Logica,2011.
J. van Benthem, D. Fernandez-Duque, EP. Evidence Logic: A New Look andNeighborhood Structures. Advances in Modal Logic, 2012.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 14/62

Motivating Examples
Other Examples, III
Program logics: modeling concurrent programs
D. Peleg. Concurrent Dynamic Logic. J. ACM (1987).
The Logic of deduction
P. Naumov. On modal logic of deductive closure. APAL (2005).
Deontic logics...
Eric Pacuit: First-Order Extensions of Classical Modal Logic 15/62
Motivating Examples
Constraints on neighborhood frames
I Monotonic or Supplemented: If X ∈ N(w) and X ⊆ Y ,then Y ∈ N(w)
I Closed under finite intersections: If X ∈ N(w) andY ∈ N(w), then X ∩ Y ∈ N(w)
I Contains the unit: W ∈ N(w)
I Augmented: Supplemented plus for each w ∈W ,⋂N(w) ∈ N(w)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 16/62

Motivating Examples
Constraints on neighborhood frames
I Monotonic or Supplemented: If X ∈ N(w) and X ⊆ Y ,then Y ∈ N(w)
I Closed under finite intersections: If X ∈ N(w) andY ∈ N(w), then X ∩ Y ∈ N(w)
I Contains the unit: W ∈ N(w)
I Augmented: Supplemented plus for each w ∈W ,⋂N(w) ∈ N(w)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 16/62

Motivating Examples
Constraints on neighborhood frames
I Monotonic or Supplemented: If X ∈ N(w) and X ⊆ Y ,then Y ∈ N(w)
I Closed under finite intersections: If X ∈ N(w) andY ∈ N(w), then X ∩ Y ∈ N(w)
I Contains the unit: W ∈ N(w)
I Augmented: Supplemented plus for each w ∈W ,⋂N(w) ∈ N(w)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 16/62

Motivating Examples
Constraints on neighborhood frames
I Monotonic or Supplemented: If X ∈ N(w) and X ⊆ Y ,then Y ∈ N(w)
I Closed under finite intersections: If X ∈ N(w) andY ∈ N(w), then X ∩ Y ∈ N(w)
I Contains the unit: W ∈ N(w)
I Augmented: Supplemented plus for each w ∈W ,⋂N(w) ∈ N(w)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 16/62

Motivating Examples
Coherent Neighborhoods
A neighborhood of w is “perfectly coherent” provided⋂N(w) 6= ∅,
how should we measure the “level of coherence”when N(w) is not closed under conjunction?
Horacio Arlo-Costa (2005). Non-Adjunctive Inference and Classical Modalities.Journal of Philosophical Logic, 34:5, pgs. 581 - 605.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 17/62

Motivating Examples
Coherent Neighborhoods
A neighborhood of w is “perfectly coherent” provided⋂N(w) 6= ∅, how should we measure the “level of coherence”
when N(w) is not closed under conjunction?
Horacio Arlo-Costa (2005). Non-Adjunctive Inference and Classical Modalities.Journal of Philosophical Logic, 34:5, pgs. 581 - 605.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 17/62

Motivating Examples
From Kripke Frames to Neighborhood Frames
Let R ⊆W ×W , define a map R→ : W → ℘W :
for each w ∈W , let R→(w) = {v | wRv}
Eric Pacuit: First-Order Extensions of Classical Modal Logic 18/62

Motivating Examples
From Kripke Frames to Neighborhood Frames
Let R ⊆W ×W , define a map R→ : W → ℘W :
for each w ∈W , let R→(w) = {v | wRv}
DefinitionGiven a relation R on a set W and a state w ∈W . A set X ⊆Wis R-necessary at w if R→(w) ⊆ X .
Eric Pacuit: First-Order Extensions of Classical Modal Logic 18/62

Motivating Examples
From Kripke Frames to Neighborhood Frames
Let R ⊆W ×W , define a map R→ : W → ℘W :
for each w ∈W , let R→(w) = {v | wRv}
Let NRw be the set of sets that are R-necessary at w :
NRw = {X | R→(w) ⊆ X}
Eric Pacuit: First-Order Extensions of Classical Modal Logic 18/62

Motivating Examples
From Kripke Frames to Neighborhood Frames
Let R ⊆W ×W , define a map R→ : W → ℘W :
for each w ∈W , let R→(w) = {v | wRv}
Let NRw be the set of sets that are R-necessary at w :
NRw = {X | R→(w) ⊆ X}
LemmaLet R be a relation on W . Then for each w ∈W , NR
w isaugmented.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 18/62

Motivating Examples
From Neighborhood Frames to Kripke Frames
Theorem
I Let 〈W ,R〉 be a relational frame. Then there is an equivalentaugmented neighborhood frame.
I Let 〈W ,N〉 be an augmented neighborhood frame. Thenthere is an equivalent relational frame.
Theorem
I Let 〈W ,R〉 be a relational frame. Then there is an equivalentaugmented neighborhood frame.
I Let 〈W ,N〉 be an augmented neighborhood frame. Thenthere is an equivalent relational frame.
for all X ⊆W , X ∈ N(w) iff X ∈ NRw .
Theorem
X Let 〈W ,R〉 be a relational frame. Then there is an equivalentaugmented neighborhood frame.
I Let 〈W ,N〉 be an augmented neighborhood frame. Thenthere is an equivalent relational frame.
Proof.For each w ∈W , let N(w) = NR
w .
Theorem
I Let 〈W ,R〉 be a relational frame. Then there is an equivalentaugmented neighborhood frame.
X Let 〈W ,N〉 be an augmented neighborhood frame. Thenthere is an equivalent relational frame.
Proof.For each w , v ∈W , wRNv iff v ∈ ∩N(w).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 19/62

Motivating Examples
From Neighborhood Frames to Kripke Frames
Theorem
I Let 〈W ,R〉 be a relational frame. Then there is an equivalentaugmented neighborhood frame.
I Let 〈W ,N〉 be an augmented neighborhood frame. Thenthere is an equivalent relational frame.
for all X ⊆W , X ∈ N(w) iff X ∈ NRw .
Theorem
X Let 〈W ,R〉 be a relational frame. Then there is an equivalentaugmented neighborhood frame.
I Let 〈W ,N〉 be an augmented neighborhood frame. Thenthere is an equivalent relational frame.
Proof.For each w ∈W , let N(w) = NR
w .
Theorem
I Let 〈W ,R〉 be a relational frame. Then there is an equivalentaugmented neighborhood frame.
X Let 〈W ,N〉 be an augmented neighborhood frame. Thenthere is an equivalent relational frame.
Proof.For each w , v ∈W , wRNv iff v ∈ ∩N(w).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 19/62

Motivating Examples
From Neighborhood Frames to Kripke Frames
Theorem
I Let 〈W ,R〉 be a relational frame. Then there is an equivalentaugmented neighborhood frame.
I Let 〈W ,N〉 be an augmented neighborhood frame. Thenthere is an equivalent relational frame.
for all X ⊆W , X ∈ N(w) iff X ∈ NRw .
Theorem
X Let 〈W ,R〉 be a relational frame. Then there is an equivalentaugmented neighborhood frame.
I Let 〈W ,N〉 be an augmented neighborhood frame. Thenthere is an equivalent relational frame.
Proof.For each w ∈W , let N(w) = NR
w .
Theorem
I Let 〈W ,R〉 be a relational frame. Then there is an equivalentaugmented neighborhood frame.
X Let 〈W ,N〉 be an augmented neighborhood frame. Thenthere is an equivalent relational frame.
Proof.For each w , v ∈W , wRNv iff v ∈ ∩N(w).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 19/62

Motivating Examples
From Neighborhood Frames to Kripke Frames
Theorem
I Let 〈W ,R〉 be a relational frame. Then there is an equivalentaugmented neighborhood frame.
I Let 〈W ,N〉 be an augmented neighborhood frame. Thenthere is an equivalent relational frame.
for all X ⊆W , X ∈ N(w) iff X ∈ NRw .
Theorem
X Let 〈W ,R〉 be a relational frame. Then there is an equivalentaugmented neighborhood frame.
I Let 〈W ,N〉 be an augmented neighborhood frame. Thenthere is an equivalent relational frame.
Proof.For each w ∈W , let N(w) = NR
w .
Theorem
I Let 〈W ,R〉 be a relational frame. Then there is an equivalentaugmented neighborhood frame.
X Let 〈W ,N〉 be an augmented neighborhood frame. Thenthere is an equivalent relational frame.
Proof.For each w , v ∈W , wRNv iff v ∈ ∩N(w).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 19/62

Motivating Examples
Definability Results
1. F |= �(ϕ ∧ ψ)→ �ϕ ∧�ψ iff F is closed under supersets(monotonic frames).
2. F |= �ϕ ∧�ψ → �(ϕ ∧�ψ) iff F is closed under finiteintersections.
3. F |= �> iff F contains the unit
4. F |= EMCN iff F is a filter
5. F |= �ϕ→ ϕ iff for each w ∈W , w ∈ ∩N(w)
6. And so on...
Eric Pacuit: First-Order Extensions of Classical Modal Logic 20/62

Motivating Examples
Definability Results
1. F |= �(ϕ ∧ ψ)→ �ϕ ∧�ψ iff F is closed under supersets(monotonic frames).
2. F |= �ϕ ∧�ψ → �(ϕ ∧�ψ) iff F is closed under finiteintersections.
3. F |= �> iff F contains the unit
4. F |= EMCN iff F is a filter
5. F |= �ϕ→ ϕ iff for each w ∈W , w ∈ ∩N(w)
6. And so on...
Eric Pacuit: First-Order Extensions of Classical Modal Logic 20/62

Motivating Examples
Definability Results
1. F |= �(ϕ ∧ ψ)→ �ϕ ∧�ψ iff F is closed under supersets(monotonic frames).
2. F |= �ϕ ∧�ψ → �(ϕ ∧�ψ) iff F is closed under finiteintersections.
3. F |= �> iff F contains the unit
4. F |= EMCN iff F is a filter
5. F |= �ϕ→ ϕ iff for each w ∈W , w ∈ ∩N(w)
6. And so on...
Eric Pacuit: First-Order Extensions of Classical Modal Logic 20/62

Motivating Examples
Completeness Results
I E is sound and strongly complete with respect to the class ofall neighborhood frames
I EM is sound and strongly complete with respect to the classof all monotonic neighborhood frames
I EC is sound and strongly complete with respect to the classof all neighborhood frames that are closed under finiteintersections
I EN is sound and strongly complete with respect to the classof all neighborhood frames that contain the unit
I K is sound and strongly complete with respect to the class ofall neighborhood frames that are filters
I K is sound and strongly complete with respect to the class ofall augmented neighborhood frames
Eric Pacuit: First-Order Extensions of Classical Modal Logic 21/62

Motivating Examples
Completeness Results
I E is sound and strongly complete with respect to the class ofall neighborhood frames
I EM is sound and strongly complete with respect to the classof all monotonic neighborhood frames
I EC is sound and strongly complete with respect to the classof all neighborhood frames that are closed under finiteintersections
I EN is sound and strongly complete with respect to the classof all neighborhood frames that contain the unit
I K is sound and strongly complete with respect to the class ofall neighborhood frames that are filters
I K is sound and strongly complete with respect to the class ofall augmented neighborhood frames
Eric Pacuit: First-Order Extensions of Classical Modal Logic 21/62

Motivating Examples
Completeness Results
I E is sound and strongly complete with respect to the class ofall neighborhood frames
I EM is sound and strongly complete with respect to the classof all monotonic neighborhood frames
I EC is sound and strongly complete with respect to the classof all neighborhood frames that are closed under finiteintersections
I EN is sound and strongly complete with respect to the classof all neighborhood frames that contain the unit
I K is sound and strongly complete with respect to the class ofall neighborhood frames that are filters
I K is sound and strongly complete with respect to the class ofall augmented neighborhood frames
Eric Pacuit: First-Order Extensions of Classical Modal Logic 21/62

Motivating Examples
Some Results
I For each Kripke model 〈W ,R,V 〉, there is an pointwiseequivalent augmented neighborhood model 〈W ,N,V 〉.
I Bimodal normal modal logics can simulate non-normal modallogics (Kracht and Wolter 1999)
I There are logics which are complete with respect to a class ofneighborhood frames but not complete with respect torelational frames (D. Gabbay 1975, M. Gerson 1975, M.Gerson 1976).
I There are logics incomplete with respect to neighborhoodframes (M. Gerson, 1975; T. Litak, 2005).
I Model theory of classical modal logics: Bisimulation, vanBenthem Characterization Theorem, Interpolation, etc. (H.Hansen, C. Kupke and EP, 2010)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 22/62

Motivating Examples
Some Results
I For each Kripke model 〈W ,R,V 〉, there is an pointwiseequivalent augmented neighborhood model 〈W ,N,V 〉.
I Bimodal normal modal logics can simulate non-normal modallogics (Kracht and Wolter 1999)
I There are logics which are complete with respect to a class ofneighborhood frames but not complete with respect torelational frames (D. Gabbay 1975, M. Gerson 1975, M.Gerson 1976).
I There are logics incomplete with respect to neighborhoodframes (M. Gerson, 1975; T. Litak, 2005).
I Model theory of classical modal logics: Bisimulation, vanBenthem Characterization Theorem, Interpolation, etc. (H.Hansen, C. Kupke and EP, 2010)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 22/62

Motivating Examples
Some Results
I For each Kripke model 〈W ,R,V 〉, there is an pointwiseequivalent augmented neighborhood model 〈W ,N,V 〉.
I Bimodal normal modal logics can simulate non-normal modallogics (Kracht and Wolter 1999)
I There are logics which are complete with respect to a class ofneighborhood frames but not complete with respect torelational frames (D. Gabbay 1975, M. Gerson 1975, M.Gerson 1976).
I There are logics incomplete with respect to neighborhoodframes (M. Gerson, 1975; T. Litak, 2005).
I Model theory of classical modal logics: Bisimulation, vanBenthem Characterization Theorem, Interpolation, etc. (H.Hansen, C. Kupke and EP, 2010)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 22/62

Motivating Examples
Some Results
I For each Kripke model 〈W ,R,V 〉, there is an pointwiseequivalent augmented neighborhood model 〈W ,N,V 〉.
I Bimodal normal modal logics can simulate non-normal modallogics (Kracht and Wolter 1999)
I There are logics which are complete with respect to a class ofneighborhood frames but not complete with respect torelational frames (D. Gabbay 1975, M. Gerson 1975, M.Gerson 1976).
I There are logics incomplete with respect to neighborhoodframes (M. Gerson, 1975; T. Litak, 2005).
I Model theory of classical modal logics: Bisimulation, vanBenthem Characterization Theorem, Interpolation, etc. (H.Hansen, C. Kupke and EP, 2010)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 22/62

Motivating Examples
Some Results
I For each Kripke model 〈W ,R,V 〉, there is an pointwiseequivalent augmented neighborhood model 〈W ,N,V 〉.
I Bimodal normal modal logics can simulate non-normal modallogics (Kracht and Wolter 1999)
I There are logics which are complete with respect to a class ofneighborhood frames but not complete with respect torelational frames (D. Gabbay 1975, M. Gerson 1975, M.Gerson 1976).
I There are logics incomplete with respect to neighborhoodframes (M. Gerson, 1975; T. Litak, 2005).
I Model theory of classical modal logics: Bisimulation, vanBenthem Characterization Theorem, Interpolation, etc. (H.Hansen, C. Kupke and EP, 2010)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 22/62

First-Order Classical Modal Logic
First-order extensions
Eric Pacuit: First-Order Extensions of Classical Modal Logic 23/62
First-Order Classical Modal Logic
First-Order Modal Language: L1
Extend the propositional modal language L with the usualfirst-order machinery (constants, terms, predicate symbols,quantifiers).
A := P(t1, . . . , tn) | ¬A | A ∧ A | �A | ∀xA
(note that equality is not in the language!)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 24/62

First-Order Classical Modal Logic
First-Order Modal Language: L1
Extend the propositional modal language L with the usualfirst-order machinery (constants, terms, predicate symbols,quantifiers).
A := P(t1, . . . , tn) | ¬A | A ∧ A | �A | ∀xA
(note that equality is not in the language!)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 24/62

First-Order Classical Modal Logic
State-of-the-art
T. Brauner and S. Ghilardi. First-order Modal Logic. Handbook of Modal Logic,pgs. 549 - 620 (2007).
D.Gabbay, V. Shehtman and D. Skvortsov. Quantification in Nonclassical Logic.Elsevier, 2009.
http://lpcs.math.msu.su/~shehtman/n.ps
M. Fitting and R. Mendelsohn. First-Order Modal Logic. Kluwer AcademicPublishers (1998).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 25/62
First-Order Classical Modal Logic
First-order Modal Logic
A constant domain Kripke frame is a tuple 〈W ,R,D〉 where Wand D are sets, and R ⊆W ×W .
A constant domain Kripke model adds a valuation function V ,where for each n-ary relation symbol P and w ∈W ,V (P,w) ⊆ Dn.
A substitution is any function σ : V → D (V the set of variables).
A substitution σ′ is said to be an x-variant of σ if σ(y) = σ′(y)for all variable y except possibly x , this will be denoted by σ ∼x σ
′.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 26/62

First-Order Classical Modal Logic
First-order Modal Logic
A constant domain Kripke frame is a tuple 〈W ,R,D〉 where Wand D are sets, and R ⊆W ×W .
A constant domain Kripke model adds a valuation function V ,where for each n-ary relation symbol P and w ∈W ,V (P,w) ⊆ Dn.
Suppose that σ is a substitution.
1. M,w |=σ P(x1, . . . , xn) iff 〈σ(x1), . . . , σ(xn)〉 ∈ V (P,w)
2. M,w |=σ �A iff R(w) ⊆ (A)M,σ
3. M,w |=σ ∀xA iff for each x-variant σ′, M,w |=σ′ A
Eric Pacuit: First-Order Extensions of Classical Modal Logic 26/62

First-Order Classical Modal Logic
First-order Modal Logic
A constant domain Neighborhood frame is a tuple 〈W ,N,D〉where W and D are sets, and N : W → ℘(℘(W )).
A constant domain Neighborhood model adds a valuationfunction V , where for each n-ary relation symbol P and w ∈W ,V (P,w) ⊆ Dn.
Suppose that σ is a substitution.
1. M,w |=σ P(x1, . . . , xn) iff 〈σ(x1), . . . , σ(xn)〉 ∈ V (P,w)
2. M,w |=σ �A iff (A)M,σ ∈ N(w)
3. M,w |=σ ∀xA iff for each x-variant σ′, M,w |=σ′ A
Eric Pacuit: First-Order Extensions of Classical Modal Logic 26/62

First-Order Classical Modal Logic
First-order Modal Logic
Let S be any (classical) propositional modal logic, by FOL + S wemean the set of formulas closed under the following rules andaxioms:
(S) All instances of axioms and rules from S.
(∀) ∀xA→ Axt (where t is free for x in A)
(Gen)A→ B
A→ ∀xB, where x is not free in A.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 27/62

First-Order Classical Modal Logic
Barcan Schemas
I Barcan formula (BF ): ∀x�A(x)→ �∀xA(x)
I converse Barcan formula (CBF ): �∀xA(x)→ ∀x�A(x)
Observation 1: CBF is provable in FOL + EM
Observation 2: BF and CBF both valid on relational frameswith constant domains
Observation 3: BF is valid in a varying domain relational frameiff the frame is anti-monotonic; CBF is valid in a varying domainrelational frame iff the frame is monotonic.
See (Fitting and Mendelsohn, 1998) for an extended discussion
Eric Pacuit: First-Order Extensions of Classical Modal Logic 28/62

First-Order Classical Modal Logic
Barcan Schemas
I Barcan formula (BF ): ∀x�A(x)→ �∀xA(x)
I converse Barcan formula (CBF ): �∀xA(x)→ ∀x�A(x)
Observation 1: CBF is provable in FOL + EM
Observation 2: BF and CBF both valid on relational frameswith constant domains
Observation 3: BF is valid in a varying domain relational frameiff the frame is anti-monotonic; CBF is valid in a varying domainrelational frame iff the frame is monotonic.
See (Fitting and Mendelsohn, 1998) for an extended discussion
Eric Pacuit: First-Order Extensions of Classical Modal Logic 28/62

First-Order Classical Modal Logic
Constant Domains without the Barcan Formula
The system EMN and seems to play a central role incharacterizing monadic operators of high probability (See Kyburgand Teng 2002, Arlo-Costa 2004).
Of course, BF should fail in this case, given that it instantiatescases of what is usually known as the ‘lottery paradox’:
For each individual x , it is highly probably that x will loose thelottery; however it is not necessarily highly probably that eachindividual will loose the lottery.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 29/62

First-Order Classical Modal Logic
Constant Domains without the Barcan Formula
The system EMN and seems to play a central role incharacterizing monadic operators of high probability (See Kyburgand Teng 2002, Arlo-Costa 2004).
Of course, BF should fail in this case, given that it instantiatescases of what is usually known as the ‘lottery paradox’:
For each individual x , it is highly probably that x will loose thelottery; however it is not necessarily highly probably that eachindividual will loose the lottery.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 29/62

First-Order Classical Modal Logic
Converse Barcan Formulas and Neighborhood Frames
A frame F is consistent iff for each w ∈W , N(w) 6= ∅
A first-order neighborhood frame F = 〈W ,N,D〉 is nontrivial iff|D| > 1
Lemma Let F be a consistent constant domain neighborhoodframe. The converse Barcan formula is valid on F iff either F istrivial or F is supplemented.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 30/62

First-Order Classical Modal Logic
W
X
X ∈ N(w)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 31/62

First-Order Classical Modal Logic
W
X
Y
Y 6∈ N(w)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 32/62

First-Order Classical Modal Logic
W
Y
X
F = ∅
∀v 6∈ Y , I (F , v) = ∅
Eric Pacuit: First-Order Extensions of Classical Modal Logic 33/62

First-Order Classical Modal Logic
W
X
Y
F = ∅
F = D
∀v ∈ X , I (F , v) = D = {a, b}
Eric Pacuit: First-Order Extensions of Classical Modal Logic 34/62

First-Order Classical Modal Logic
W
Y
X
F = ∅
F = DF = {a}
∀v ∈ Y − X , I (F , v) = D = {a}
Eric Pacuit: First-Order Extensions of Classical Modal Logic 35/62

First-Order Classical Modal Logic
W
Y
X
F = ∅
F = DF = {a}
(F [a])M = Y 6∈ N(w) hence w 6|= ∀x�F (x)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 36/62

First-Order Classical Modal Logic
W
Y
X
F = ∅
F = DF = {a}
(∀xF (x))M = (F [a])M ∩ (F [b])M = X ∈ N(w)
hence w |= �∀xF (x)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 37/62

First-Order Classical Modal Logic
Barcan Formulas and Neighborhood Frames
We say that a frame closed under ≤ κ intersections if for eachstate w and each collection of sets {Xi | i ∈ I} where |I | ≤ κ,∩i∈IXi ∈ N(w).
Lemma Let F be a consistent constant domain neighborhoodframe. The Barcan formula is valid on F iff either
1. F is trivial or
2. if D is finite, then F is closed under finite intersections and ifD is infinite and of cardinality κ, then F is closed under ≤ κintersections.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 38/62
First-Order Classical Modal Logic
Completeness Theorems
Theorem FOL + E is sound and strongly complete with respect tothe class of all frames.
Theorem FOL + EC is sound and strongly complete with respectto the class of frames that are closed under intersections.
Theorem FOL + EM is sound and strongly complete with respectto the class of supplemented frames.
Theorem FOL + E + CBF is sound and strongly complete withrespect to the class of frames that are either non-trivial andsupplemented or trivial and not supplemented.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 39/62
First-Order Classical Modal Logic
Completeness Theorems
Theorem FOL + E is sound and strongly complete with respect tothe class of all frames.
Theorem FOL + EC is sound and strongly complete with respectto the class of frames that are closed under intersections.
Theorem FOL + EM is sound and strongly complete with respectto the class of supplemented frames.
Theorem FOL + E + CBF is sound and strongly complete withrespect to the class of frames that are either non-trivial andsupplemented or trivial and not supplemented.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 39/62

First-Order Classical Modal Logic
Completeness Theorems
Theorem FOL + E is sound and strongly complete with respect tothe class of all frames.
Theorem FOL + EC is sound and strongly complete with respectto the class of frames that are closed under intersections.
Theorem FOL + EM is sound and strongly complete with respectto the class of supplemented frames.
Theorem FOL + E + CBF is sound and strongly complete withrespect to the class of frames that are either non-trivial andsupplemented or trivial and not supplemented.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 39/62

First-Order Classical Modal Logic
Completeness Theorems
Theorem FOL + E is sound and strongly complete with respect tothe class of all frames.
Theorem FOL + EC is sound and strongly complete with respectto the class of frames that are closed under intersections.
Theorem FOL + EM is sound and strongly complete with respectto the class of supplemented frames.
Theorem FOL + E + CBF is sound and strongly complete withrespect to the class of frames that are either non-trivial andsupplemented or trivial and not supplemented.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 39/62

First-Order Classical Modal Logic
FOL + K and FOL + K + BF
Theorem FOL + K is sound and strongly complete with respectto the class of filters.
Observation The augmentation of the smallest canonical modelfor FOL + K is not a canonical model for FOL + K. In fact, theclosure under infinite intersection of the minimal canonical modelfor FOL + K is not a canonical model for FOL + K.
Lemma The augmentation of the smallest canonical model forFOL + K + BF is a canonical for FOL + K + BF .
Theorem FOL + K + BF is sound and strongly complete withrespect to the class of augmented first-order neighborhood frames.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 40/62

First-Order Classical Modal Logic
FOL + K and FOL + K + BF
Theorem FOL + K is sound and strongly complete with respectto the class of filters.
Observation The augmentation of the smallest canonical modelfor FOL + K is not a canonical model for FOL + K. In fact, theclosure under infinite intersection of the minimal canonical modelfor FOL + K is not a canonical model for FOL + K.
Lemma The augmentation of the smallest canonical model forFOL + K + BF is a canonical for FOL + K + BF .
Theorem FOL + K + BF is sound and strongly complete withrespect to the class of augmented first-order neighborhood frames.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 40/62

First-Order Classical Modal Logic
FOL + K and FOL + K + BF
Theorem FOL + K is sound and strongly complete with respectto the class of filters.
Observation The augmentation of the smallest canonical modelfor FOL + K is not a canonical model for FOL + K. In fact, theclosure under infinite intersection of the minimal canonical modelfor FOL + K is not a canonical model for FOL + K.
Lemma The augmentation of the smallest canonical model forFOL + K + BF is a canonical for FOL + K + BF .
Theorem FOL + K + BF is sound and strongly complete withrespect to the class of augmented first-order neighborhood frames.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 40/62

General Frames for First-Order Modal Logics
Is the addition of quantifiers straightforward?
1. S4M is complete for the class of all frames that are reflexive,transitive and final (every world can see an ‘end-point’).However FOL + S4M is incomplete for Kripke models basedon S4M-frames. (see Hughes and Cresswell, pg. 283).
2. S4.2 is S4 with ♦�ϕ→ �♦ϕ. This logics is complete for theclass of frames that are reflexive, transitive and convergent.However, FOL + S4M + BF is incomplete for the class ofconstant domain models based on reflexive, transitive andconvergent frames. (see Hughes and Cresswell, pg. 271)
3. The quantified extension of GL is not recursivelyaxiomatizable (Cresswell, 1997).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 41/62

General Frames for First-Order Modal Logics
Is the addition of quantifiers straightforward?
1. S4M is complete for the class of all frames that are reflexive,transitive and final (every world can see an ‘end-point’).However FOL + S4M is incomplete for Kripke models basedon S4M-frames. (see Hughes and Cresswell, pg. 283).
2. S4.2 is S4 with ♦�ϕ→ �♦ϕ. This logics is complete for theclass of frames that are reflexive, transitive and convergent.However, FOL + S4M + BF is incomplete for the class ofconstant domain models based on reflexive, transitive andconvergent frames. (see Hughes and Cresswell, pg. 271)
3. The quantified extension of GL is not recursivelyaxiomatizable (Cresswell, 1997).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 41/62

General Frames for First-Order Modal Logics
Is the addition of quantifiers straightforward?
1. S4M is complete for the class of all frames that are reflexive,transitive and final (every world can see an ‘end-point’).However FOL + S4M is incomplete for Kripke models basedon S4M-frames. (see Hughes and Cresswell, pg. 283).
2. S4.2 is S4 with ♦�ϕ→ �♦ϕ. This logics is complete for theclass of frames that are reflexive, transitive and convergent.However, FOL + S4M + BF is incomplete for the class ofconstant domain models based on reflexive, transitive andconvergent frames. (see Hughes and Cresswell, pg. 271)
3. The quantified extension of GL is not recursivelyaxiomatizable (Cresswell, 1997).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 41/62

General Frames for First-Order Modal Logics
Is the addition of quantifiers straightforward?
1. S4M is complete for the class of all frames that are reflexive,transitive and final (every world can see an ‘end-point’).However FOL + S4M is incomplete for Kripke models basedon S4M-frames. (see Hughes and Cresswell, pg. 283).
2. S4.2 is S4 with ♦�ϕ→ �♦ϕ. This logics is complete for theclass of frames that are reflexive, transitive and convergent.However, FOL + S4M + BF is incomplete for the class ofconstant domain models based on reflexive, transitive andconvergent frames. (see Hughes and Cresswell, pg. 271)
3. The quantified extension of GL is not recursivelyaxiomatizable (Cresswell, 1997).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 41/62

General Frames for First-Order Modal Logics
What is going on?
Horacio Arlo-Costa and EP (2006). First-Order Classical Modal Logic. HoracioArlo-Costa and Eric Pacuit, Studia Logica, Volume 84:2, pgs. 171 - 210.
R. Goldblatt and E. Mares. A General Semantics for Quantified Modal Logic.AiML, 2006.
R. Goldblatt. Quantifiers, Propositions and Identity: Admissible Semantics forQuantified Modal and Substructural Logics. Lecture Notes in Logic No. 38,Cambridge University Press and the Association for Symbolic Logic, 2011.
Skip
Eric Pacuit: First-Order Extensions of Classical Modal Logic 42/62

General Frames for First-Order Modal Logics
What is going on?
Horacio Arlo-Costa and EP (2006). First-Order Classical Modal Logic. HoracioArlo-Costa and Eric Pacuit, Studia Logica, Volume 84:2, pgs. 171 - 210.
R. Goldblatt and E. Mares. A General Semantics for Quantified Modal Logic.AiML, 2006.
R. Goldblatt. Quantifiers, Propositions and Identity: Admissible Semantics forQuantified Modal and Substructural Logics. Lecture Notes in Logic No. 38,Cambridge University Press and the Association for Symbolic Logic, 2011.
Skip
Eric Pacuit: First-Order Extensions of Classical Modal Logic 42/62

General Frames for First-Order Modal Logics
Background: Incompleteness
There are (consistent) modal logics that are incomplete
A general model is a structure 〈W ,R,V ,A〉 where A is a suitableboolean algebra with an operator of propositions.
All modal logics are sound and strongly complete with respect togeneral frames.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 43/62

General Frames for First-Order Modal Logics
Theorem (Goldblatt and Mares) For any canonical propositionalmodal logic S, its quantified extension QS is complete over a classof general frames for which the underlying propositional frame arejust the S-frames.
I New perspective on the Barcan formula: it corresponds toTarskian models
I There is a trade-off between having the underlying Kripkeframe validate the propositional logic in question and having aTarskian-reading of the quantifier.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 44/62
General Frames for First-Order Modal Logics
Theorem (Goldblatt and Mares) For any canonical propositionalmodal logic S, its quantified extension QS is complete over a classof general frames for which the underlying propositional frame arejust the S-frames.
I New perspective on the Barcan formula: it corresponds toTarskian models
I There is a trade-off between having the underlying Kripkeframe validate the propositional logic in question and having aTarskian-reading of the quantifier.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 44/62

General Frames for First-Order Modal Logics
Central Idea
Algebraic reading of the universal quantifier: ∀xϕ is true at aworld w iff there is some proposition X such that X entails everyinstantiation of ϕ and X obtains at w .
M,w |=σ ∀xA iff there is a proposition X such that w ∈ X andX ⊆ (A)Mσ(x |d) for all d ∈ D.
vs.
M,w |=σ ∀xA iff for all d ∈ D, M,w |=σ(x |d) A
Eric Pacuit: First-Order Extensions of Classical Modal Logic 45/62
General Frames for First-Order Modal Logics
Central Idea
Algebraic reading of the universal quantifier: ∀xϕ is true at aworld w iff there is some proposition X such that X entails everyinstantiation of ϕ and X obtains at w .
M,w |=σ ∀xA iff there is a proposition X such that w ∈ X andX ⊆ (A)Mσ(x |d) for all d ∈ D.
vs.
M,w |=σ ∀xA iff for all d ∈ D, M,w |=σ(x |d) A
Eric Pacuit: First-Order Extensions of Classical Modal Logic 45/62
General Frames for First-Order Modal Logics
General Frames
Let 〈W ,R〉 be a frame.
[R] : ℘W → ℘W where[R](X ) = {w ∈W | for all v ∈W , wRv implies v ∈ X}So (�α)M = [R](α)M
X ⇒ Y = (W − X ) ∪ YSo (α→ β)M = (α)M ⇒ (β)M.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 46/62

General Frames for First-Order Modal Logics
Halmos Functions
ϕ : DV → ℘WLet ϕ and ψ be two such functions, we can lift [R] and ⇒ tooperations of functions: Eg., if ϕ : DV → ℘W and f ∈ DV .([R]ϕ)(f ) = [R](ϕ(f ))
Fix a set Prop ⊆ ℘W . This defines for each S ⊆ ℘W ,
uS =⋃{X ∈ Prop | X ⊆
⋂S}
Eric Pacuit: First-Order Extensions of Classical Modal Logic 47/62

General Frames for First-Order Modal Logics
Halmos Functions
ϕ : DV → ℘WLet ϕ and ψ be two such functions, we can lift [R] and ⇒ tooperations of functions: Eg., if ϕ : DV → ℘W and f ∈ DV .([R]ϕ)(f ) = [R](ϕ(f ))
Fix a set Prop ⊆ ℘W . This defines for each S ⊆ ℘W ,
uS =⋃{X ∈ Prop | X ⊆
⋂S}
Eric Pacuit: First-Order Extensions of Classical Modal Logic 47/62

General Frames for First-Order Modal Logics
General Frames for First-Order Modal Logic
Suppose Prop ⊆ ℘W and let ϕ : DV → Prop,(∀xϕ)f = ud∈Dϕ(f [x |d ])
〈W ,R,V ,Prop,PropFun〉 where
I Prop contains ∅ and is closed under ⇒ and [R]
I Contains the function ϕ∅(f ) = ∅ for all f ∈ DV
I PropFun is closed under ⇒, [R] and ∀x .
I Assume (P)M : DV → ℘W is an element of PropFun for eachatomic predicate P.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 48/62

General Frames for First-Order Modal Logics
General Frames for First-Order Modal Logic
Suppose Prop ⊆ ℘W and let ϕ : DV → Prop,(∀xϕ)f = ud∈Dϕ(f [x |d ])
〈W ,R,V ,Prop,PropFun〉 where
I Prop contains ∅ and is closed under ⇒ and [R]
I Contains the function ϕ∅(f ) = ∅ for all f ∈ DV
I PropFun is closed under ⇒, [R] and ∀x .
I Assume (P)M : DV → ℘W is an element of PropFun for eachatomic predicate P.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 48/62

General Frames for First-Order Modal Logics
General Completeness
Theorem For any propositional modal logic S, the quantified logicQS is complete for the class of (all validating) quantified generalframes.
Note that the canonical model construction has as worldsmaximally consistent sets that need not be ∀-complete.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 49/62

General Frames for First-Order Modal Logics
Key ResultsTheorem (Goldblatt and Mares) If S is a canonical propositionallogic, then QS is characterized by the class of all QS-frames whoseunderlying propositional frames validate S.
Logics containing the Barcan formula have two characterizingcanonical general frames: one that is Tarskian and one that is not.
1. If S is canonical, then the second canonical model will havean underlying propositional frame that validates S (eg., S4.2),but may not be Tarskian.
2. On the other hand, The Tarskian canonical model may nothave an underlying propositional frame that is a frame for S(again S4.2 is an example).
R. Goldblatt. Quantifiers, Propositions and Identity: Admissible Semantics forQuantified Modal and Substructural Logics. Lecture Notes in Logic No. 38,Cambridge University Press and the Association for Symbolic Logic, 2011.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 50/62

General Frames for First-Order Modal Logics
Key ResultsTheorem (Goldblatt and Mares) If S is a canonical propositionallogic, then QS is characterized by the class of all QS-frames whoseunderlying propositional frames validate S.
Logics containing the Barcan formula have two characterizingcanonical general frames: one that is Tarskian and one that is not.
1. If S is canonical, then the second canonical model will havean underlying propositional frame that validates S (eg., S4.2),but may not be Tarskian.
2. On the other hand, The Tarskian canonical model may nothave an underlying propositional frame that is a frame for S(again S4.2 is an example).
R. Goldblatt. Quantifiers, Propositions and Identity: Admissible Semantics forQuantified Modal and Substructural Logics. Lecture Notes in Logic No. 38,Cambridge University Press and the Association for Symbolic Logic, 2011.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 50/62

General Frames for First-Order Modal Logics
Key ResultsTheorem (Goldblatt and Mares) If S is a canonical propositionallogic, then QS is characterized by the class of all QS-frames whoseunderlying propositional frames validate S.
Logics containing the Barcan formula have two characterizingcanonical general frames: one that is Tarskian and one that is not.
1. If S is canonical, then the second canonical model will havean underlying propositional frame that validates S (eg., S4.2),but may not be Tarskian.
2. On the other hand, The Tarskian canonical model may nothave an underlying propositional frame that is a frame for S(again S4.2 is an example).
R. Goldblatt. Quantifiers, Propositions and Identity: Admissible Semantics forQuantified Modal and Substructural Logics. Lecture Notes in Logic No. 38,Cambridge University Press and the Association for Symbolic Logic, 2011.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 50/62

General Frames for First-Order Modal Logics
Conclusions
I Characterize other “modality-quantifier interactions” in termsof properties on neighborhoods (eg. ∃x�ϕ(x)→ �∃xϕ(x))
I Equality, existence predicate, free systems, etc.
I Extensions with higher-order quantification Explain
G. Boella, D. Gabbay, V. Genovese, L. van der Torre. Higher-Order CoalitionLogic. Proceedings of ECAI, 2010.
I Different perspectives on the first-order modal language.
H. Sturm and F. Wolter. First-order Expressivity for S5-models: Modal vs.two-sorted Languages. Journal of Philosophical Logic (2000).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 51/62

General Frames for First-Order Modal Logics
Conclusions
I Characterize other “modality-quantifier interactions” in termsof properties on neighborhoods (eg. ∃x�ϕ(x)→ �∃xϕ(x))
I Equality, existence predicate, free systems, etc.
I Extensions with higher-order quantification Explain
G. Boella, D. Gabbay, V. Genovese, L. van der Torre. Higher-Order CoalitionLogic. Proceedings of ECAI, 2010.
I Different perspectives on the first-order modal language.
H. Sturm and F. Wolter. First-order Expressivity for S5-models: Modal vs.two-sorted Languages. Journal of Philosophical Logic (2000).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 51/62

General Frames for First-Order Modal Logics
Conclusions
I Characterize other “modality-quantifier interactions” in termsof properties on neighborhoods (eg. ∃x�ϕ(x)→ �∃xϕ(x))
I Equality, existence predicate, free systems, etc.
I Extensions with higher-order quantification Explain
G. Boella, D. Gabbay, V. Genovese, L. van der Torre. Higher-Order CoalitionLogic. Proceedings of ECAI, 2010.
I Different perspectives on the first-order modal language.
H. Sturm and F. Wolter. First-order Expressivity for S5-models: Modal vs.two-sorted Languages. Journal of Philosophical Logic (2000).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 51/62

General Frames for First-Order Modal Logics
Conclusions
I Characterize other “modality-quantifier interactions” in termsof properties on neighborhoods (eg. ∃x�ϕ(x)→ �∃xϕ(x))
I Equality, existence predicate, free systems, etc.
I Extensions with higher-order quantification Explain
G. Boella, D. Gabbay, V. Genovese, L. van der Torre. Higher-Order CoalitionLogic. Proceedings of ECAI, 2010.
I Different perspectives on the first-order modal language.
H. Sturm and F. Wolter. First-order Expressivity for S5-models: Modal vs.two-sorted Languages. Journal of Philosophical Logic (2000).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 51/62

General Frames for First-Order Modal Logics
Thank you.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 52/62

General Frames for First-Order Modal Logics
Extensions: Higher-Order Coalition Logic
G. Boella, D. Gabbay, V. Genovese, L. van der Torre. Higher-Order CoalitionLogic. 2010.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 53/62

General Frames for First-Order Modal Logics
Strategy Logics
I Coalitional Logic: Reasoning about (local) group power.
[C ]ϕ: coalition C has a joint action to bring about ϕ.
M. Pauly. A Modal Logic for Coalition Powers in Games. Journal of Logic andComputation 12 (2002).
I Alternating-time Temporal Logic: Reasoning about (local andglobal) group power:
〈〈A〉〉�ϕ: The coalition A has a joint action to ensure that ϕwill remain true.
R. Alur, T. Henzinger and O. Kupferman. Alternating-time Temproal Logic.Jouranl of the ACM (2002).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 54/62

General Frames for First-Order Modal Logics
Strategy Logics
I Coalitional Logic: Reasoning about (local) group power.
[C ]ϕ: coalition C has a joint action to bring about ϕ.
M. Pauly. A Modal Logic for Coalition Powers in Games. Journal of Logic andComputation 12 (2002).
I Alternating-time Temporal Logic: Reasoning about (local andglobal) group power:
〈〈A〉〉�ϕ: The coalition A has a joint action to ensure that ϕwill remain true.
R. Alur, T. Henzinger and O. Kupferman. Alternating-time Temproal Logic.Jouranl of the ACM (2002).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 54/62
General Frames for First-Order Modal Logics
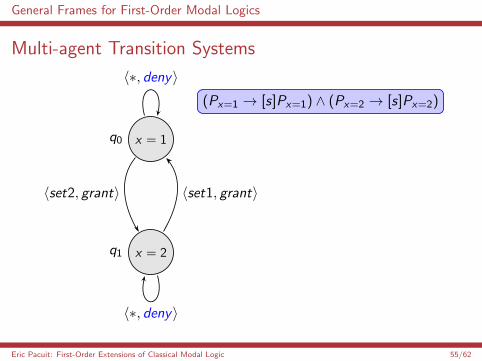
Multi-agent Transition Systems
x = 1q0
x = 2q1
〈set2, grant〉 〈set1, grant〉
〈∗, deny〉
〈∗, deny〉
(Px=1 → [s]Px=1) ∧ (Px=2 → [s]Px=2)
Eric Pacuit: First-Order Extensions of Classical Modal Logic 55/62

General Frames for First-Order Modal Logics
Multi-agent Transition Systems
x = 1q0
x = 2q1
〈set2, grant〉 〈set1, grant〉
〈∗, deny〉
〈∗, deny〉
Px=1 → ¬[s]Px=2
Eric Pacuit: First-Order Extensions of Classical Modal Logic 55/62

General Frames for First-Order Modal Logics
Multi-agent Transition Systems
x = 1q0
x = 2q1
〈set2, grant〉 〈set1, grant〉
〈∗, deny〉
〈∗, deny〉
Px=1 → [s, c]Px=2
Eric Pacuit: First-Order Extensions of Classical Modal Logic 55/62

General Frames for First-Order Modal Logics
Coalition Logic: ϕ := p | ¬ϕ | ϕ ∧ ϕ | [C ]ϕ
M,w |= [C ]ϕ iff (ϕ)M ∈ N(w ,C ): “Coalition C has a jointstrategy to force the outcome to satisfy ϕ”.
Higher-Order Coalition Logic: ϕ :=F (x1, . . . , xn) | Xx | ¬ϕ | ϕ ∧ ϕ | ∀Xϕ | ∀xϕ | [{x}ϕ]ϕ | 〈{x}ϕ〉ϕ
I F (x1, . . . , xn) is a first-order atomic formula
I x is a first-order variable
I X is a set variable
I {x}ψ is a group operator representing the set of all d suchthat ψ[d/x ] holds
Eric Pacuit: First-Order Extensions of Classical Modal Logic 56/62

General Frames for First-Order Modal Logics
Coalition Logic: ϕ := p | ¬ϕ | ϕ ∧ ϕ | [C ]ϕ
M,w |= [C ]ϕ iff (ϕ)M ∈ N(w ,C ): “Coalition C has a jointstrategy to force the outcome to satisfy ϕ”.
Higher-Order Coalition Logic: ϕ :=F (x1, . . . , xn) | Xx | ¬ϕ | ϕ ∧ ϕ | ∀Xϕ | ∀xϕ | [{x}ϕ]ϕ | 〈{x}ϕ〉ϕ
I F (x1, . . . , xn) is a first-order atomic formula
I x is a first-order variable
I X is a set variable
I {x}ψ is a group operator representing the set of all d suchthat ψ[d/x ] holds
Eric Pacuit: First-Order Extensions of Classical Modal Logic 56/62

General Frames for First-Order Modal Logics
Coalition Logic: ϕ := p | ¬ϕ | ϕ ∧ ϕ | [C ]ϕ
M,w |= [C ]ϕ iff (ϕ)M ∈ N(w ,C ): “Coalition C has a jointstrategy to force the outcome to satisfy ϕ”.
Higher-Order Coalition Logic: ϕ :=F (x1, . . . , xn) | Xx | ¬ϕ | ϕ ∧ ϕ | ∀Xϕ | ∀xϕ | [{x}ϕ]ϕ | 〈{x}ϕ〉ϕ
I F (x1, . . . , xn) is a first-order atomic formula
I x is a first-order variable
I X is a set variable
I {x}ψ is a group operator representing the set of all d suchthat ψ[d/x ] holds
Eric Pacuit: First-Order Extensions of Classical Modal Logic 56/62

General Frames for First-Order Modal Logics
Coalition Logic: ϕ := p | ¬ϕ | ϕ ∧ ϕ | [C ]ϕ
M,w |= [C ]ϕ iff (ϕ)M ∈ N(w ,C ): “Coalition C has a jointstrategy to force the outcome to satisfy ϕ”.
Higher-Order Coalition Logic: ϕ :=F (x1, . . . , xn) | Xx | ¬ϕ | ϕ ∧ ϕ | ∀Xϕ | ∀xϕ | [{x}ϕ]ϕ | 〈{x}ϕ〉ϕ
I F (x1, . . . , xn) is a first-order atomic formula
I x is a first-order variable
I X is a set variable
I {x}ψ is a group operator representing the set of all d suchthat ψ[d/x ] holds
Eric Pacuit: First-Order Extensions of Classical Modal Logic 56/62

General Frames for First-Order Modal Logics
HCL: Expressivity
What does the added expressive power give you?
I Relationships between coalitions:∀x(super user(x)→ user(x))
I General quantification over coalitions:∀X (∀x(Xx → user(x))→ [{y}Xy ]ϕ)
Every coalition such that all of its members are users canachieve ϕ.
I Complex relationships between coalitions and agents:[{x}ϕ(x)]ψ → [{y}∃x(ϕ(x) ∧ collaborates(y , x))]ψ
If the coalition represented by ϕ can achieve ψ then so canany group that collaborates with at least one member of ϕ(x).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 57/62

General Frames for First-Order Modal Logics
HCL: Expressivity
What does the added expressive power give you?
I Relationships between coalitions:∀x(super user(x)→ user(x))
I General quantification over coalitions:∀X (∀x(Xx → user(x))→ [{y}Xy ]ϕ)
Every coalition such that all of its members are users canachieve ϕ.
I Complex relationships between coalitions and agents:[{x}ϕ(x)]ψ → [{y}∃x(ϕ(x) ∧ collaborates(y , x))]ψ
If the coalition represented by ϕ can achieve ψ then so canany group that collaborates with at least one member of ϕ(x).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 57/62

General Frames for First-Order Modal Logics
HCL: Expressivity
What does the added expressive power give you?
I Relationships between coalitions:∀x(super user(x)→ user(x))
I General quantification over coalitions:∀X (∀x(Xx → user(x))→ [{y}Xy ]ϕ)
Every coalition such that all of its members are users canachieve ϕ.
I Complex relationships between coalitions and agents:[{x}ϕ(x)]ψ → [{y}∃x(ϕ(x) ∧ collaborates(y , x))]ψ
If the coalition represented by ϕ can achieve ψ then so canany group that collaborates with at least one member of ϕ(x).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 57/62

General Frames for First-Order Modal Logics
HCL: Expressivity
What does the added expressive power give you?
I Relationships between coalitions:∀x(super user(x)→ user(x))
I General quantification over coalitions:∀X (∀x(Xx → user(x))→ [{y}Xy ]ϕ)
Every coalition such that all of its members are users canachieve ϕ.
I Complex relationships between coalitions and agents:[{x}ϕ(x)]ψ → [{y}∃x(ϕ(x) ∧ collaborates(y , x))]ψ
If the coalition represented by ϕ can achieve ψ then so canany group that collaborates with at least one member of ϕ(x).
Eric Pacuit: First-Order Extensions of Classical Modal Logic 57/62
General Frames for First-Order Modal Logics
HCL: Barcan/Converse Barcan Formulas
Converse Barcan: [{x}ϕ(x)]∀yψ(y)→ ∀y [{x}ϕ(x)]ϕ(y)
Barcan: ∀y [{x}ϕ(x)]ϕ(y)→ [{x}ϕ(x)]∀yψ(y)
[{x}x = Eric]∀y(CMU(y)→ happy(y))→∀y [{x}x = Eric](CMU(y)→ happy(y))
If I can do something to make everyone happy at CMU implies foreach person at CMU, I can do something to make them happy.
∀y [{x}x = Eric](CMU(y)→ happy(y))6→[{x}x = Eric]∀y(CMU(y)→ happy(y))
For each person at CMU, I can make them happy does not implythat I can do something to make everyone at CMU happy.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 58/62

General Frames for First-Order Modal Logics
HCL: Barcan/Converse Barcan Formulas
Converse Barcan: [{x}ϕ(x)]∀yψ(y)→ ∀y [{x}ϕ(x)]ϕ(y)
Barcan: ∀y [{x}ϕ(x)]ϕ(y)→ [{x}ϕ(x)]∀yψ(y)
[{x}x = Eric]∀y(CMU(y)→ happy(y))→∀y [{x}x = Eric](CMU(y)→ happy(y))
If I can do something to make everyone happy at CMU implies foreach person at CMU, I can do something to make them happy.
∀y [{x}x = Eric](CMU(y)→ happy(y))6→[{x}x = Eric]∀y(CMU(y)→ happy(y))
For each person at CMU, I can make them happy does not implythat I can do something to make everyone at CMU happy.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 58/62
General Frames for First-Order Modal Logics
HCL: Barcan/Converse Barcan Formulas
Converse Barcan: [{x}ϕ(x)]∀yψ(y)→ ∀y [{x}ϕ(x)]ϕ(y)
Barcan: ∀y [{x}ϕ(x)]ϕ(y)→ [{x}ϕ(x)]∀yψ(y)
[{x}x = Eric]∀y(CMU(y)→ happy(y))→∀y [{x}x = Eric](CMU(y)→ happy(y))
If I can do something to make everyone happy at CMU implies foreach person at CMU, I can do something to make them happy.
∀y [{x}x = Eric](CMU(y)→ happy(y))6→[{x}x = Eric]∀y(CMU(y)→ happy(y))
For each person at CMU, I can make them happy does not implythat I can do something to make everyone at CMU happy.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 58/62

General Frames for First-Order Modal Logics
HCL: Barcan/Converse Barcan Formulas
Converse Barcan: [{x}ϕ(x)]∀yψ(y)→ ∀y [{x}ϕ(x)]ϕ(y)
Barcan: ∀y [{x}ϕ(x)]ϕ(y)→ [{x}ϕ(x)]∀yψ(y)
[{x}x = Eric]∀y(CMU(y)→ happy(y))→∀y [{x}x = Eric](CMU(y)→ happy(y))
If I can do something to make everyone happy at CMU implies foreach person at CMU, I can do something to make them happy.
∀y [{x}x = Eric](CMU(y)→ happy(y))6→[{x}x = Eric]∀y(CMU(y)→ happy(y))
For each person at CMU, I can make them happy does not implythat I can do something to make everyone at CMU happy.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 58/62

General Frames for First-Order Modal Logics
HCL: Barcan/Converse Barcan Formulas
Converse Barcan: [{x}ϕ(x)]∀yψ(y)→ ∀y [{x}ϕ(x)]ϕ(y)
Barcan: ∀y [{x}ϕ(x)]ϕ(y)→ [{x}ϕ(x)]∀yψ(y)
[{x}x = Eric]∀y(CMU(y)→ happy(y))→∀y [{x}x = Eric](CMU(y)→ happy(y))
If I can do something to make everyone happy at CMU implies foreach person at CMU, I can do something to make them happy.
∀y [{x}x = Eric](CMU(y)→ happy(y))6→[{x}x = Eric]∀y(CMU(y)→ happy(y))
For each person at CMU, I can make them happy does not implythat I can do something to make everyone at CMU happy.
Eric Pacuit: First-Order Extensions of Classical Modal Logic 58/62

General Frames for First-Order Modal Logics
Higher-Order Coalition Logic
Sound and complete axiomatization combines ideas from coalitionlogic, first-order extensions of non-normal modal logics andHenkin-style completeness for second-order logic.
Back
Eric Pacuit: First-Order Extensions of Classical Modal Logic 59/62