finite-time output feedback stabilization and control for a quadrotor
TRANSCRIPT
Kybernetika
Chuanlin Zhang; Shihua Li; Shihong DingFinite-time output feedback stabilization and control for a quadrotor mini-aircraft
Kybernetika, Vol. 48 (2012), No. 2, 206--222
Persistent URL: http://dml.cz/dmlcz/142809
Terms of use:© Institute of Information Theory and Automation AS CR, 2012
Institute of Mathematics of the Academy of Sciences of the Czech Republic provides access to digitizeddocuments strictly for personal use. Each copy of any part of this document must contain theseTerms of use.
This paper has been digitized, optimized for electronic delivery and stampedwith digital signature within the project DML-CZ: The Czech Digital MathematicsLibrary http://project.dml.cz

KYB ERNET IK A — VO LUME 4 8 ( 2 0 1 2 ) , NUMBER 2 , PAGES 2 0 6 – 2 2 2
FINITE-TIME OUTPUT FEEDBACK STABILIZATIONAND CONTROL FOR A QUADROTOR MINI-AIRCRAFT
Chuanlin Zhang, Shihua Li and Shihong Ding
This paper focuses on the finite-time output feedback control problem for a quad-rotor mini-aircraft system. First, a finite-time state feedback controller is designed by utilizing the finite-time control theory. Then, considering the case that the velocity states are not measurable,a finite-time stable observer is developed to estimate the unmeasurable states. Thus a finite-time output feedback controller is obtained and the stability analysis is provided to ensurethe finite-time stability of the closed loop system. The proposed control method improves theconvergence and disturbance rejection properties with respect to the asymptotically controlresults. Simulation results show the effectiveness of the proposed method.
Keywords: quadrotor mini-aircraft, finite-time stability, finite-time observer, output feed-back
Classification: 93E12, 62A10
1. INTRODUCTION
The autonomous mini-aerial vehicles are drawing an increasing interest in recent yearsdue to the growing numbers of civil and military applications of UAVs (unmanned aerialvehicles). Helicopter is one of the most important machines of the UAVs for its versatilityand manoeuver ability to perform many types of tasks. One trend of such aircraft isthe development of small flying machines capable of performing hover as well as forwardflight. A mini-aircraft which has four rotors is an interesting alternative to the classicalhelicopter because this novel rotorcraft is mechanically simpler than a regular helicoptersince it does not require a swashplate. The autonomous quadrotor aircrafts have beeninvestigated for a variety of applications both as individual vehicles and in multiplevehicle teams, including surveillance, search, rescue and mobile sensor networks.
The quad-rotor mini-aircraft is an under-actuated dynamic rotorcraft with four inputforces and six output coordinates. Various effective control methods have been developedto meet the increasing demands on the UAV performance for the quadrotors, such asfeedback linearization method [6, 25] backstepping control technique [8, 21], slidingmode control [3, 9] and backstepping integrated with sliding mode control [7]. From theoptimization control aspect, optimal control is drawing an increasing attention becauseit is often required for the quadrotor UAVs to carry out a hovering motion maneuver inminimum-time or in minimum-energy [1, 2, 18].

FTC for quad-rotor mini-aircraft 207
Different from classical time-optimal control approaches, Continuous and nonsmoothcontrol via state or dynamic output feedback can provide a finite-time convergence ratefor the equilibrium of the system, but these closed-loop systems are of interest not onlybecause of faster convergence rates around the equilibria, but also because they canperform better disturbance rejection abilities [4, 5]. Therefore, there are more and moreattentions focusing on the continuous (nonsmooth) control and many important resultshave been achieved.
For the second-order integrator systems, [4] proposes a homogeneous state feedbackcontrol method which is very inspiring for the following works by the nonlinear commu-nity, then [15] studies the problem of output feedback finite-time stabilization and givesa class of nonsmooth finite-time observers. For the high order systems, [28] presents andesign procedure which is called adding a power integrator technique to solve a class ofnth-order lower-triangular systems. [14] proposes a finite-time feedback control law fora class of STLC systems. For the nth-order finite-time observer problem, [24, 26, 29]handle the problem of the finite-time homogeneous observer and give significant resultsfor finite-time output feedback control. And recently for the nth-order upper-triangularsystems, the global asymptotical and finite-time stabilization problems have been ad-dressed by integrating the adding a power integrator design technique with a series ofnested saturation techniques in [10, 11] respectively.
When revisiting the actual systems such as the spacecraft attitude, [20] proposes aglobal set stabilization method using finite-time control technique. And for the rigidrobot manipulators, [12, 16] use different control strategy to handle the finite-time con-trol problem. [13] proposes a global finite-time output feedback control law to stabilizea PVTOL aircraft. When we consider the finite-time control problem for the quad-rotorUAVs, compared to the numerous interesting results achieved for the system that aimto achieve the asymptotical convergence rate research in the past several decades, thereare fewer results on the finite-time stabilization for these intensively used systems. [3, 9]deal with the finite-time control problem by applying a super twisting algorithm [19, 27]and the authors have demonstrated the effectiveness of proposed methods with respectto the stabilization, tracking and disturbance rejection. Hence the research into thefinite-time control for these highly used aircraft systems will lead to some theoreticaland practical significance. In this paper, we use another nonsmooth control approachnewly developed in [11] to propose an alternative strategy to finite-time stabilize andcontrol the quadrotor mini-aircraft system.
Considering the mini-rotor aircraft which has four rotors, the authors first design ahomogeneous finite-time controller to track and control the altitude and yaw angularmovements, then extend the roll and pitch state feedback control result to finite-timestable case by employing the approach proposed in [11]. Considering the case when thetranslational velocities are not available from measurement due to weight consideration,cost limit or other design requirement, etc., a finite-time observer is constructed toestimate the translational velocities. Finally a finite-time output feedback controller isobtained by replacing the unmeasured velocity states with the observed ones. A rigorousstability analysis is provided to ensure the effectiveness of the proposed method.
This paper is organized as follows. Some preliminaries are presented in Section 2.Section 3 describes the system model and gives the control objective. In Section 4, the

208 C. L. ZHANG, S. H. LI AND S.H. DING
finite-time state feedback control law is proposed. Section 5 solves the finite-time outputfeedback control problem. Numerical simulations in Section 6 show the performance ofclosed loop system under the proposed controller. A conclusion and reference list endthe paper.
2. PRELIMINARIES
Definition 2.1. (Bhat and Bernstein [5]) Consider a system
x = f(x), f(0) = 0, x ∈ Rn, (1)
where f : U0 → Rn is continuous with respect to x on an open neighborhood U0 of theorigin x = 0. The zero solution of system (1) is finite-time convergent if there are an openneighborhood U of the origin and a function T : U\{0} → (0,∞), such that ∀x0 ∈ Uevery solution x(t, 0, x0) of system (1) with x0 as the initial condition is defined andx(t, 0, x0) ∈ U\{0} for t ∈ [0, T (x0)), and limt→T (x0) x(t, 0, x0) = 0. The zero solutionof this system is finite-time stable if it is Lyapunov stable and finite-time convergent.When U = Rn, then the zero solution is said to be globally finite-time stable.
Lemma 2.2. (Bhat and Bernstein [4]) Consider the following double integrator system
x1 = x2
x2 = u.(2)
There exists a homogeneous controller
u = −k1sigα1(x1)− k2sig
α2(x2), (3)
where sigα(x) = sign(x)|x|α, k1, k2 > 0 are proper constants, 0 < α2 < 1 andα1 = α2
2−α2. Then the equilibrium of this system will be globally finite-time stable.
Lemma 2.3. (Hong et al. [15]) For the double integrator system (2), there exists afinite-time observer
˙x1 = x2 + k1sigσ1(x1 − x1)
˙x2 = u+ k2sigσ2(x1 − x1),
(4)
where k1, k2 > 0, σ2 ∈ (0, 1), σ2 = 2σ1 − 1. Then the output feedback control lawdescribed as follows
u = −k1sigα1(x1)− k2sig
α2(x2), (5)
will globally finite-time stabilize system (2).
Next, consider the following system
xi = xi+1, i = 1, 2, . . . , n− 1xn = u.
(6)

FTC for quad-rotor mini-aircraft 209
Lemma 2.4. (Ding et al. [11]) For system (6), if we construct the controller as thefollowing form
u = un(Xn(t)) = −βnσrn+1ε (x1/rn
n − u1/rn
n−1 (Xn−1)), (7)
whereu0 = 0, Xi = (x1, x2, . . . , xi),ui(Xi(t)) = −βiσri+1
ε (x1/ri
i − u1/ri
i−1 (Xi−1)), i = 1, 2, . . . , n− 1,
σε(x) ={εsign(x), for |x| > εx, for |x| ≤ ε
(8)
with ri := (i − 1)τ + 1, i = 1, 2, . . . , n + 1 are fractions of two odd numbers with aconstant − 1
n < τ < 0. Then there exist appropriate gains β′is such that controller (7)globally finite-time stabilizes system (6) for any small constant ε > 0.
3. SYSTEM MODEL DESCRIPTION AND PROBLEM FORMULATION
A dynamic model of a quad-rotor mini-aircraft is expressed as follows [8]
mξ = u
− sin θcos θ sinφcos θ cosφ
+
00−mg
Jη = −C(η, η)η + τ,
(9)
where (ξT , ξT , ηT , ηT ) = (x, y, z, x, y, z, ψ, θ, φ, ψ, θ, φ) the states of system, x and y thecoordinates in the horizontal plane, z the vertical position, ψ the yaw angle, θ the pitchangle, φ the roll angle, u the throttle control input, τ the generalized moments, andC(η, η) the Coriolis term. Here a change of the input variables is used as follows
τ = Jτ + C(η, η)η, (10)
where τ = [τψ τθ τφ]T , then (9) can be rewritten as:
mx = −u sin θ (11)my = u cos θ sinφ (12)mz = u cos θ cosφ−mg (13)ψ = τψ (14)
θ = τθ (15)φ = τφ, (16)
where the control input u is the throttle input, and τψ, τθ, τφ are the new angularmoment inputs (yaw, pitch and roll moments).
The control objective in this paper is to design the throttle input u and the angularmoment inputs τψ, τθ, τφ to control the states to a desired value.

210 C. L. ZHANG, S. H. LI AND S.H. DING
4. FINITE-TIME STATE FEEDBACK CONTROLLER DESIGN
In this section, a local finite-time state feedback control scheme is designed for thequad-rotor mini-aircraft system.
Assumption 4.1. Assume the pitch and roll angles θ and φ are both bounded in(−π/2, π/2).
Theorem 4.2. Suppose the quad-rotor mini-aircraft system (11) – (16) satisfy Assump-tion 4.1, it will be finite-time stabilized by the following controller
u = 1cosφ cos θ (−kz1sig
α1(z − zd)− kz2sigα2(z) +mg)
τψ = −kψ1sigα1(ψ)− kψ2sig
α2(ψ)
τθ = β4cos2 θg σ1+4γ
ε (( −gθcos2 θ )
11+3γ + β
11+3γ
3 σε((−g tan θ)1
1+2γ
+β1
1+2γ
2 σε(x1
1+γ + β1
1+γ
1 σε(x))))− 2 tan θθ2
τφ = −β4cos2 φg σ1+4γ
ε (( gφcos2 φ )
11+3γ + β
11+3γ
3 σε((g tanφ)1
1+2γ
+β1
1+2γ
2 σε(y1
1+γ + β1
1+γ
1 σε(y))))− 2 tanφφ2,
(17)
where kz1, kψ1, kz2, kψ2 > 0 are positive constants, 0 < α2 < 1, 0 < α2 < 1 andα1 = α2
2−α2, α1 = α2
2−α2, zd is the desired altitude, βi, i = 1, 2, 3, 4 and γ, ε are proper
gains defined as in Lemma 2.4.
P r o o f . For the subsystem (13), with Assumption 4.1 in mind, we notice cos θ cosφ 6= 0,then let
u =1
cos θ cosφ(u∗ +mg), (18)
then the subsystem (13) will reduce to
z =1mu∗. (19)
By using Lemma 2.2, the homogeneous controller
u∗ = −kz1sigα1(z − zd)− kz2sigα2(z), (20)
where kz1, kz2, α1, α2 are defined in Theorem 4.2, will drive z to a desired altitude zd ina finite-time T1. Similarly for the subsystem (14), the controller
τψ = −kψ1sigα1(ψ)− kψ2sig
α2(ψ), (21)
where the parameters are defined similar with that in (20), will stabilize the state ψ tozero in a finite time T2.
Substituting the control law (20), (21) into system (11) – (16), the system will reduceto
mx = −(u∗ +mg) tan θcosφ
my = (u∗ +mg) tanφmz = −kz1sigα1(z − zd)− kz2sig
α2(z)ψ = −kψ1sig
α1(ψ)− kψ2sigα2(ψ)
θ = τθφ = τφ.
(22)

FTC for quad-rotor mini-aircraft 211
With Lemma 2.2 in mind, after the time t = max{T1, T2}, one can have ψ = 0, z = zd.So the control inputs u∗, τψ are equal to 0. Then the subsystem (11), (12), (15), (16)will reduce to
x = −g tan θcosφ
y = g tanφθ = τθφ = τφ.
(23)
In order to handle the right nonlinear items for (23), here feedback linearization method[17] is applied, first we consider (y − φ) subsystem
y = g tanφφ = τφ.
(24)
The fourth derivative of y with respect to time can be easily obtained as follows
y(4) = 2gsinφcos3 φ
φ2 +g
cos2 φτφ. (25)
Let τφ = cos2 φg (v − 2g sinφ
cos3 φ φ2) = cos2 φ
g v − 2 tanφφ2, then we have
y(4) = v. (26)
Applying Lemma 2.4, it is easily to obtain the controller for (26) as follows
v = −β4σ1+4γε ((y(3))
11+3γ + β
11+3γ
3 σε((y(2))1
1+2γ + β1
1+2γ
2 σε(y1
1+γ + β1
1+γ
1 σε(y)))). (27)
Then for y − φ subsystem (24), we have the following controller
τφ = −β4cos2 φg σ1+4γ
ε (( gφcos2 φ )
11+3γ + β
11+3γ
3 σε((g tanφ)1
1+2γ
+β1
1+2γ
2 σε(y1
1+γ + β1
1+γ
1 σε(y))))− 2 tanφφ2(28)
with proper gains βi, γ and ε which are defined in Lemma 2.4. The controller (28)guarantees the convergence of the equilibrium of the closed loop subsystem (24) −− (28)within a finite time interval T3, that is for any t > T3, we have φ = 0 and y = 0. Then(x− θ) subsystem reduces to
x = −g tan θθ = τθ.
(29)
With a similar procedure, the fourth derivative of x is as follows
x(4) = −2g sin θcos3 θ θ
2 − gcos2 θ τθ, (30)
with τθ = − cos2 θg (v + 2g sin θ
cos3 θ θ2) = − cos2 θ
g v − 2 tan θθ2 in mind, we have x(4) = v.Similarly by Lemma 2.4, we have the following control law for subsystem (29)
τφ = β4cos2 θg σ1+4γ
ε (( −gθcos2 θ )
11+3γ + β
11+3γ
3 σε((−g tan θ)1
1+2γ
+β1
1+2γ
2 σε(x1
1+γ + β1
1+γ
1 σε(x))))− 2 tan θθ2.(31)
The above controller (31) guarantees the convergence for the states (θ, x) to zero withina finite time instant. This completes the proof. �

212 C. L. ZHANG, S. H. LI AND S.H. DING
Remark 4.3. Letting α1 = α1 = α2 = α2 = 1, the controller (20) and (21) reduce tothe PD controller proposed in [8].
Remark 4.4. In the normal case, gains are usually chosen sufficiently large to guaranteethe system a better disturbance rejection ability. However the gains cannot be selectedarbitrarily large when considering the control energy and the practical system’s stabilityaspect. But in the finite-time control strategy, the fractional power items such as γ in(28), (31) can be regulated to achieve a better disturbance rejection ability while thecontrol energy is bounded in a design level. So the finite-time control strategy leadsto a better disturbance rejection ability with conventional asymptotic stability controlmethod.
5. FINITE-TIME OUTPUT FEEDBACK CONTROLLER DESIGN
Considering the case when the translational velocities are not available from measure-ment, next a finite-time observer will be developed to estimate the translational veloc-ities. Then naturally an output feedback finite-time controller based on the estimatedstates from observer can be obtained. However, it should be pointed out that the famousseparation principle for the linear control system is usually not available for the non-linear control system, which means that a rigorous proof should be given to guaranteethe stability of the whole system including the state feedback control subsystem and theobservation subsystem. The key point is to prove that during the procedure when thestates of observer finite-time converge to the translational velocities, the states of closedloop system under the output feedback finite-time controller will not escape to infinity.
Define the whole states
[x, x, y, y, z, z, ψ, ψ, θ, θ, φ, φ] = [x1, x2, . . . , x12] = xT , (32)
then rewrite the mini-rotorcraft system as
x1 = x2
x2 = − um sinx9
x3 = x4
x4 = um cosx9 sinx11
x5 = x6
x6 = um cosx9 cosx11 −mg
x7 = x8
x8 = τψx9 = x10
x10 = τθx11 = x12
x12 = τφ.
(33)
Provided that ψ, θ, φ are measurable and the angular velocities (ψ, θ, φ) can be obtainedfrom three gyros. For the translational velocities, a finite-time stable observer will beconstructed to estimate the velocities (x, y, z). The finite-time observer developed hereis based on homogeneous method, as inspired by [15].

FTC for quad-rotor mini-aircraft 213
Theorem 5.1. Under the following observer
˙x1 = x2 + l1sigδ1(x1 − x1)
˙x2 = − um sinx9 + l2sig
δ2(x1 − x1)˙x3 = x4 + l3sig
δ1(x3 − x3)˙x4 = u
m cosx9 sinx11 + l4sigδ2(x3 − x3)
˙x5 = x6 + l5sigδ1(x5 − x5)
˙x6 = um cosx9 cosx11 −mg + l6sig
δ2(x5 − x5),
(34)
where li, i = 1, 2, . . . , 6 are positive gains to be determined later, and δ1 ∈ (1/2, 1), δ2 =2δ1 − 1, the estimated states x2, x4, x6 can converge to the states x2, x4, x6 of system(33) in a finite time.
P r o o f . Define the error ei = xi − xi, then the dynamics of observation error is givenby
e1 = e2 − l1sigδ1(e1)
e2 = −l2sigδ2(e1)e3 = e4 − l3sig
δ1(e3)e4 = −l4sigδ2(e3)e5 = e6 − l5sig
δ1(e5)e6 = −l6sigδ2(e5).
(35)
The above equations can be considered as three independent subsystems and each oneis in the form
e1 = e2 − l1sigδ1(e1)
e2 = −l2sigδ2(e1).(36)
So using Lemma 2.3, one obtain that error system (35) is finite-time stable, i. e., thereexists a time instant T4, for t > T4, such that
x2 = x2, x4 = x4, x6 = x6. (37)
The theorem is thus proved. �
In what follows, by replacing the unmeasurable states x2, x4, x6 in (33) with theestimated states x2, x4, x6 generated from the finite-time observer (34), the main resultof this section is obtained.
Theorem 5.2. The quad-rotor min-aircraft system (11) – (16) can be finite-time stabi-lized by the following output feedback controller
u = 1cos x9 cos x11
(−kz1sigα1(x5 − zd)− kz2sigα2(x6) +mg)
τψ = −kψ1sigα1(x7)− kψ2sig
α2(x8)
τθ = β4cos2 x9g σ1+4γ
ε (( −gx10cos2 x9
)1
1+3γ + β1
1+3γ
3 σε((−g tanx9)1
1+2γ
+β1
1+2γ
2 σε(x1
1+γ
2 + β1
1+γ
1 σε(x1))))− 2 tanx9x210
τφ = −β4cos2 x11
g σ1+4γε (( gx12
cos2 x11)
11+3γ + β
11+3γ
3 σε((g tanx11)1
1+2γ
+β1
1+2γ
2 σε(x1
1+γ
4 + β1
1+γ
1 σε(x3))))− 2 tanx11x212.
(38)

214 C. L. ZHANG, S. H. LI AND S.H. DING
P r o o f . Note that for t > T4, with (37) in mind, then the finite-time output feedbackcontrol law (38) reduces to the state feedback control law (17). What follows is to provethe states xi will be bounded at any finite-time interval T .
Substituting (38) into (33), yields
x1 = x2
x2 = −−kz1sigα1 (x5−zd)−kz2sig
α2 (x6)+mgm
tan x9cos x11
x3 = x4
x4 = −kz1sigα1 (x5−zd)−kz2sig
α2 (x6)+mgm tanx11
x5 = x6
x6 = −kz1m sigα1(x5 − zd)− kz2
m sigα2(x6)x7 = x8
x8 = −kψ1sigα1(x7)− kψ2sig
α2(x8)x9 = x10
x10 = β4cos2 x9g σ1+4γ
ε (( −gx10cos2 x9
)1
1+3γ + β1
1+3γ
3 σε((−g tanx9)1
1+2γ
+β1
1+2γ
2 σε(x1
1+γ
2 + β1
1+γ
1 σε(x1))))− 2 tanx9x210
x11 = x12
x12 = −β4cos2 x11
g σ1+4γε (( gx12
cos2 x11)
11+3γ + β
11+3γ
3 σε((g tanx11)1
1+2γ
+β1
1+2γ
2 σε(x1
1+γ
4 + β1
1+γ
1 σε(x3))))− 2 tanx11x212.
(39)
Denoting the right hand side of (39) as F(x1, x2, x2, . . . , x12), so system (39) can bewritten as
dxdt
= F(·) = [F1(·), F2(·), . . . , F12(·)]T . (40)
First, since x2, x4 converge to x2, x4 within a finite-time T4, from the saturationproperty of (28), (31), it is easy to conclude that x9, x10, x11, x12 is bounded at anyfinite-time interval [0, T ]. Associate with Assumption 4.1, then there exist two positiveconstants c1, c2 such that
tan x9cos x11
≤ c1tanx9 tanx11 ≤ c2.
(41)
Note that for 0 < α1, α1, α2, α2 < 1, one has
sigα1(x5 − zd) ≤ 1 + |x5 − zd| ≤ 1 + |zd|+ |x5|sigα2(x6) ≤ 1 + |x6|sigα1(x7) ≤ 1 + |x7|sigα2(x8) ≤ 1 + |x8|.
(42)
With (41) and (42) in mind, there exists proper positive constants ci, i = 3, 4, . . . , 11such that
||F2(·)|| ≤ c3(|x5|+ |x6|) + c4||F4(·)|| ≤ c5(|x5|+ |x6|) + c6||F6(·)|| ≤ c7(|x5|+ |x6|) + c8||F8(·)|| ≤ c9(|x7|+ |x8|) + c10||F10(·)|| ≤ c11||F12(·)|| ≤ c11.
(43)

FTC for quad-rotor mini-aircraft 215
Construct a Lyapunov function for system (39) as the following form
V (X) =12
12∑i=1
x2i , (44)
then the derivative of V is
V (X) =n∑i=1
xiFi(·)
≤6∑i=1
x2i−1x2i + (|x5|+ |x6|)(c3x2 + c5x4 + c7x6)
+(c4x2 + c6x4 + c8x6) + c11(x10 + x12).
(45)
Applying the inequality xy ≤ 12 (x2 + y2), x, y ∈ R to the terms in (45), one can have
6∑i=1
x2i−1x2i ≤12
12∑i=1
x2i (46)
(c4x2 +c6x4 +c8x6)+c11(x10 +x12) ≤12(c24 +c26 +c28 +2c211)+
12(x2
2 +x24 +x2
6 +x210 +x2
12)
(47)(|x5|+ |x6|)(c3x2 + c5x4 + c7x6) ≤ 1
2c3(2x22 + x2
5 + x26) + 1
2c5(2x24 + x2
6 + x25)
+ 12c7(x
25 + 2x2
6 + x26)
≤ C1(x22 + x2
4 + x25 + x2
6 + x26),
(48)
where C1 = max{c3, c5, c7}. Note that in the finite-time observer (34), x6 is alwaysbounded for any finite time t. Then following (46), (47) and (48), one can have
V (X) ≤ 12
12∑i=1
x2i + C1(x2
2 + x24 + x2
5 + x26 + x2
6) + 12 (c24 + c26 + c28 + 2c211)
+ 12 (x2
2 + x24 + x2
6 + x210 + x2
12)
≤ C2( 12
12∑i=1
x2i ) + C3
= C2V (X) + C3,
(49)
where C2 = max{2, 2C1 + 2}, C3 = 12 (c24 + c26 + c28 + 2c211) + C1x
26. Define the initial
value of V (X) as V0, from (49), one can obtain
V (X) ≤(V0 +
C3
C2
)eC2t − C3
C2. (50)
It can be easily concluded from (50) that V (X) will not escape to infinity for any finitetime t, which implies that the states x1, . . . , x12 will not escape to infinity in the timeinterval [0, T4]. Then when t > T4, the output feedback controller (38) reduces tothe state feedback controller (17), with Theorem 4.2 in mind, the closed-loop system(33), (34) and (38) is finite-time stable. �

216 C. L. ZHANG, S. H. LI AND S.H. DING
6. NUMERICAL SIMULATION RESULTS
In what follows, Matlab is used to simulate the performance of the proposed finite-time controller. The control objective is to drive the mini-rotor craft to an altitudeof 20(m), i. e., the state of the system model is expected to be driven to the position(x, y, z) = (0, 0, 20)(m) while (ψ, θ, φ) = (0, 0, 0)(rad). Here the parameters for thecontrol law (17) are selected as m = 2(kg), γ = −2/13, kz1 = 1, kψ1 = 1/2, kz2 =1, kψ2 = 1/2, α1 = α1 = 1/5, α2 = α2 = 1/3, β1 = 1, β2 = 3, β3 = 10, β4 = 30, ε = 0.2.The initial states for conducting the simulation are
(x(0), y(0), z(0)) = (10,−10, 0)(m),(x(0), y(0), z(0)) = (0.5, 0.5, 0.5)(m/s),(ψ(0), θ(0), φ(0)) = (0.5, 0.5, 0.5)(rad),(ψ(0), θ(0), φ(0)) = (0.5, 0.5, 0.5)(rad/s).
(1)
The initial values for observer (34) are selected as ( ˙x(0), ˙y(0), ˙z(0)) = (0, 0, 0)(rad/s)and the parameters are δ1 = 3/5, δ2 = 1/5, li = 0.5, i = 1, 2, . . . , 6.
Figure 1 shows the response curves under the finite-time state feedback controller(17). Figure 2 shows the time response of the control input signals. Figure 3 shows theperformance of finite-time observer (34) which performs a fast convergence rate. Figure 4shows the response curves under the finite-time output feedback controller (38).
In what follows, The results in this paper will be compared with the previous con-troller in [8] for controlling the four-rotor mini-aircraft. That controller is given asfollows
u = 1cos θ cosφ (−az1z − az2(z − zd) +mg),
τψ = −aψ1ψ − aψ2(ψ − ψd),τφ = −b1σφ1(φ+ σφ2(φ+ φ+ σφ3(φ+ 2φ+ y
g + σφ4(φ+ 3φ+ 3 yg + yg )))),
τθ = −b2σθ1(θ + σθ2(θ + θ + σθ3(θ + 2θ − xg + σθ4(θ + 3θ − 3 xg −
xg )))).
(2)
To have a fair comparison, proper gains are carefully chosen for the controller (2) sothat the control signal amplitudes of both controllers are in the same level.
Here two disturbances d1(t) = 0.3 sin(t), d2(t) = 16 sin(2t) are added to subsystems(14), (15), (16). The corresponding model now is
ψ = τψ + d1(t)θ = τθ + d2(t)φ = τφ + d2(t).
(3)
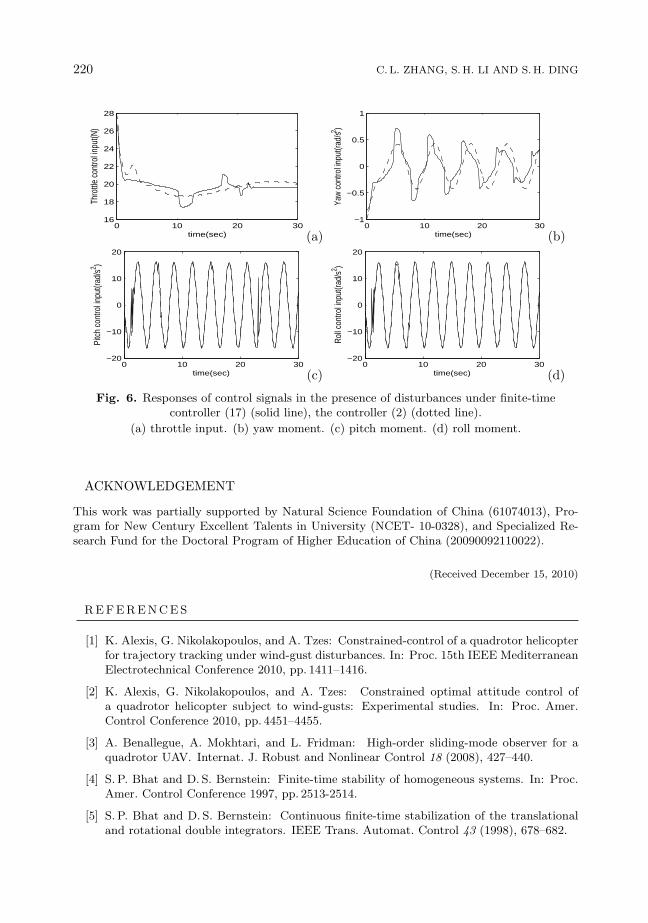
By spending time on regulating the control parameters for these two controllers tomake the performances of their closed loop systems as good as possible. Here theparameters in (2) are selected as az1 = 0.1, az2 = 0.2, aψ1 = 1, aψ2 = 1, b1 = b2 =20, φi = θi = 1, i = 1, 2, 3, 4 and the initial values are selected the same as (1). Figure 5shows the state responses under these two different controllers. It can be observed thatthe finite-time controller can produce a faster convergence rate and a better disturbancerejection ability. From Figure 6, one can see the control input amplitudes of bothcontroller are almost in the same level.

FTC for quad-rotor mini-aircraft 217
0 10 20 30−10
−5
0
5
10
15
20
25
time(sec)
Post
ion(
m)
xyz
(a)0 10 20 30
−0.2
0
0.2
0.4
0.6
0.8
time(sec)
Yaw
angl
e(ra
d)
(b)
0 10 20 30−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
time(sec)
Pitc
h an
gle(
rad)
(c)0 10 20 30
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
time(sec)
Roll a
ngle
(rad)
(d)
Fig. 1. Responses of states under finite-time state controller (17).
(a) position. (b) yaw angle. (c) pitch angle. (d) roll angle.
0 10 20 3016
18
20
22
24
26
28
time(sec)
Thro
ttle
cont
rol in
put(N
)
(a)0 10 20 30
−1
−0.5
0
0.5
1
time(sec)
Yaw
cont
rol in
put(r
ad/s2 )
(b)
0 10 20 30−20
−15
−10
−5
0
5
10
time(sec)
Pitc
h co
ntro
l inpu
t(rad
/s2 )
(c)0 10 20 30
−20
−15
−10
−5
0
5
10
time(sec)
Roll c
ontro
l inpu
t(rad
/s2 )
(d)
Fig. 2. Responses of control signals under finite-time state controller (17).
(a) throttle input. (b) yaw moment. (c) pitch moment. (d) roll moment.

218 C. L. ZHANG, S. H. LI AND S.H. DING
0 10 20 30−4
−3
−2
−1
0
1
2
time(sec)
x v
eloc
ity(m
/s)
(a)0 10 20 30
−2
−1
0
1
2
3
4
5
time(sec)
y ve
locit
y(m
/s)
(b)
0 10 20 30−1
−0.5
0
0.5
1
1.5
2
2.5
time(sec)
z v
eloc
ity(m
/s)
(c)
Fig. 3. State responses of finite-time observer (34). (a) x. (b) y. (c) z.
(Solid lines denote the velocities and dotted lines denote their estimates.)
0 10 20 30−10
−5
0
5
10
15
20
25
time(sec)
Posit
ion(
m) x
yz
(a)0 10 20 30
−0.5
0
0.5
1
time(sec)
Yaw
angl
e(ra
d)
(b)
0 10 20 30−0.2
0
0.2
0.4
0.6
time(sec)
Pitc
h an
gle(
rad)
(c)0 10 20 30
−0.2
0
0.2
0.4
0.6
time(sec)
Roll a
ngle
(rad)
(d)
Fig. 4.State responses under the finite-time output feedback controller (38).
(a) position. (b) yaw angle. (c) pitch angle. (d) roll angle.

FTC for quad-rotor mini-aircraft 219
0 10 20 30−10
−5
0
5
10
15
time(sec)
post
ion(
m)
(a)0 10 20 30
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
time(sec)
Yaw
angl
e(ra
d)
(b)
0 10 20 30−0.4
−0.2
0
0.2
0.4
0.6
time(sec)
Pitc
h an
gle(
rad)
(c)0 10 20 30
−0.4
−0.2
0
0.2
0.4
0.6
time(sec)
Roll a
ngle
(rad)
(d)
25 26 27 28 29 30−0.02
−0.01
0
0.01
0.02
time(sec)
Pitc
h an
gle(
rad)
(e)25 26 27 28 29 30
−0.02
−0.01
0
0.01
0.02
time(sec)
Rol
l ang
le(ra
d)
(f)
Fig. 5. State responses in the presence of disturbances under finite-time controller (17) (solidline) and the controller (2) (dotted line).
(a) position. (b) yaw angle. (c) pitch angle. (d) roll angle. (e) an enlarged diagram of (c). (f)
an enlarged diagram of (d).
7. CONCLUSION
In this paper, considering the case that the velocity states are not measurable, the finite-time output feedback control problem for the quad-rotor mini-aircraft system has beenaddressed. First, under some assumptions, a finite-time state feedback controller hasbeen designed by employing the finite-time control techniques. Then, a finite-time stableobserver has been developed to estimate the unmeasurable states. Finally a finite-timeoutput feedback controller has been obtained. A stability analysis has been providedto ensure the finite-time stability of the closed loop system. This control method hasa better robustness against disturbances and performs a faster convergence rate thanthe conventional control method. Simulation results have shown the effectiveness of theproposed control method.
220 C. L. ZHANG, S. H. LI AND S.H. DING
0 10 20 3016
18
20
22
24
26
28
time(sec)
Thro
ttle
cont
rol in
put(N
)
(a)0 10 20 30
−1
−0.5
0
0.5
1
time(sec)
Yaw
con
trol i
nput
(rad/
s2 )
(b)
0 10 20 30−20
−10
0
10
20
time(sec)
Pitc
h co
ntro
l inpu
t(rad
/s2 )
(c)0 10 20 30
−20
−10
0
10
20
time(sec)
Roll c
ontro
l inpu
t(rad
/s2 )
(d)
Fig. 6. Responses of control signals in the presence of disturbances under finite-timecontroller (17) (solid line), the controller (2) (dotted line).
(a) throttle input. (b) yaw moment. (c) pitch moment. (d) roll moment.
ACKNOWLEDGEMENT
This work was partially supported by Natural Science Foundation of China (61074013), Pro-gram for New Century Excellent Talents in University (NCET- 10-0328), and Specialized Re-search Fund for the Doctoral Program of Higher Education of China (20090092110022).
(Received December 15, 2010)
R E FER E NCE S
[1] K. Alexis, G. Nikolakopoulos, and A. Tzes: Constrained-control of a quadrotor helicopterfor trajectory tracking under wind-gust disturbances. In: Proc. 15th IEEE MediterraneanElectrotechnical Conference 2010, pp. 1411–1416.
[2] K. Alexis, G. Nikolakopoulos, and A. Tzes: Constrained optimal attitude control ofa quadrotor helicopter subject to wind-gusts: Experimental studies. In: Proc. Amer.Control Conference 2010, pp. 4451–4455.
[3] A. Benallegue, A. Mokhtari, and L. Fridman: High-order sliding-mode observer for aquadrotor UAV. Internat. J. Robust and Nonlinear Control 18 (2008), 427–440.
[4] S. P. Bhat and D. S. Bernstein: Finite-time stability of homogeneous systems. In: Proc.Amer. Control Conference 1997, pp. 2513-2514.
[5] S. P. Bhat and D. S. Bernstein: Continuous finite-time stabilization of the translationaland rotational double integrators. IEEE Trans. Automat. Control 43 (1998), 678–682.
FTC for quad-rotor mini-aircraft 221
[6] S. Bouabdallah, E. Murrieri, and R. Siegwart: Design and control of an indoor microquadrotor. In: Proc. IEEE International Conference on Robotics and Automation 2004,pp. 4393–4398.
[7] S. Bouabdallah and R. Siegwart: Backstepping and sliding-mode techniques applied toan indoor micro quadrotors. In: Proc. IEEE International Conference on Robotics andAutomation 2005, pp. 2247–2252.
[8] P. Castillo, A. Dzul, and R. Lozano: Real-time stabilization and tracking of a four-rotormini-aircraft. IEEE Trans. Control Systems Technol. 12 (2004), 510–516.
[9] L. Derafa, L. Fridman, A. Benallegue, and A. Ouldali: Super twisting control algorithmfor the four rotors helicopter attitude tracking problem. In: Proc. 11th InternationalWorkshop on Variable Structure Systems 2010, pp. 62–67.
[10] S. H. Ding, C. J. Qian, and S. H. Li: Global stabilization of a class of feedforward systemswith lower-order nonlinearities. IEEE Trans. Automat. Control 55 (2010), 691–696.
[11] S. H. Ding, C. J. Qian, and S.H. Li: Global stabilization of a class of upper-triangular sys-tems with unbounded or uncontrollable linearizations. Internat. J. Robust and NonlinearControl 21 (2010), 271–294.
[12] Y. Feng, X. H. Yu, and Z. H. Man: Non-singular terminal sliding mode control of rigidmanipulators. Automatica 38 (2002), 2159–2167.
[13] M. T. Frye, S. H. Ding, C. J. Qian, and S. H. Li: Global Finite-time stabilization of aPVTOL aircraft by output feedback. In: Proc. 48th IEEE Conference on Decision andControl 2009, pp. 2831–2836.
[14] Y. G. Hong: Finite-time stablization and stabilizability of a class of controllable systems.Systems Control Lett. 46 (2002), 231–236.
[15] Y. G. Hong, J. Huang, and Y. S. Xu: On an output feedback finite-time stabilizationproblem. IEEE Trans. Automat. Control 46 (2001), 305–309.
[16] Y. G. Hong, Y. S. Xu, and J. Huang: Finite time control for robot manipulators. SystemsControl Lett. 46 (2002), 243–253.
[17] A. Isidori: Nonlinear Control systems: An Introduction, Lecture Notes in Control andInformation Sciences. Springer, Berlin 1985.
[18] L. C. Lai, C. C. Yang, and C. J. Wu: Time-optimal control of a hovering quad-rotorhelicopter. J. Intell. and Robotic Systems 45 (2006), 115–135.
[19] A. Levant: Sliding order and sliding accuracy in sliding mode control. Internat. J. ofControl 58 (1993), 1247–1263.
[20] S. H. Li, S. H. Ding, and Q. Li: Global set stabilization of the spacecraft attitude usingfinite-time control technique. Internat. J. Control 82 (2009), 822–836.
[21] T. Madani and A. Benallegue: Control of a quadrotor mini-helicopter via full statebackstepping technique. In: Proc. 45th IEEE Conference on Decision and Control 2006.
[22] T. Madani and A. Benallegue: Backstepping control with exact 2-sliding mode estimationfor a quadrotor unmanned aerial vehicle. In: Proc. International Conference on IntelligentRobots and Systems (2007), 141–146.
[23] T. Madani and A. Benallegue: Sliding mode observer and backstepping control for aquadrotor unmanned aerial vehicles. In: Proc. Amer. Control Confer. 2007, pp. 5887–5892.
222 C. L. ZHANG, S. H. LI AND S.H. DING
[24] T. Menard, E. Moulay, and W. Perruquetti: A global High-gain Finite-time Observer.IEEE Trans. Automat. Control 55 (2010), 1500–1506.
[25] V. Mistler, A. Benallegue, and N. K. M. Sirdi: Exact Linearization and NoninteractingControl of a 4 Rotors Helicopter via Dynamic Feedback. In: Proc. 2001 IEEE Interna-tional Workshop on Robot and Human Interactive Communication 2001.
[26] W. Perruquetti, T. Floquet, and E. Moulay: Finite time observers and secure communi-cation. IEEE Trans. Automat. Control 53 (2008), 356–360.
[27] A. Polyakov and A. Poznyak: Reaching time estimation for “super-twisting” second ordersliding mode controller via Lyapunov function designing. IEEE Tran. Automat. Control54 (2009), 1951–1955.
[28] C. J. Qian and W. Lin: A continuous feedback approach to global strong stabilization ofnonlinear systems. IEEE Trans. Automat. Control 46 (2001), 1061–1079.
[29] Y. J. Shen and X.H. Xia: Semi-global finite-time observers for nonlinear systems. Auto-matica 44 (2008), 3152–3156.
[30] A. R. Teel: A nonlinear small gain theorem for the analysis of control systems withsaturation. IEEE Trans. Automat. Control 41 (1996), 1256–1270.
Chuanlin Zhang, School of Automation, Southeast University, Nanjing, 210096. China.
e-mail: [email protected]
Shihua Li, (corresponding author), School of Automation, Southeast University, Nanjing, 210096.
China.
e-mail: [email protected]
Shihong Ding, College of Electrical and Information Engineering, Jiangsu University, Zhen-
jiang. China.
e-mail: [email protected]