fartygsstabilitet 5c1010 - home page of the mechanics ...hanno/fartygsstabilitet, 5c1010.pdf ·...
TRANSCRIPT

Fartygsstabilitet
5C1010
Robin Larsson, [email protected] Lindberg, [email protected]
Benedikt Wallden, [email protected]
Handledare: Gunnar Maxe
Maj 2007

Sammanfattning
Som projektuppgift i kursen 5C1010 Fordjupningsarbete i Mekanik, KTH-2007, har genomfortsen undersokning angaende skrovformens betydelse for ett fartygs stabilitet. Med stabilitet avsesbatens formaga att aterga till uppratt lage efter det att den tvingats till en krangning av en yttrepaverkan.
Ett lampligt matt pa stabilitet ar fartygets GZ-kurva, dar GZ ar det vinkelrata avstandetmellan tva krafter som verkar for att aterfora fartygskroppen till jamviktslage. De bada kraftersom asyftas ar tyngdkraften och lyftkraften, som bada verkar i lodrat riktning, men till varandramotriktat, vilket leder till att ett ratande moment uppkommer.
I denna undersokning har det ratande momentets havarm som funktion av krangningsvinkeln(GZ-kurvor) bestamts for olika skrovformer varvid en bedomning av skrovformens betydelse forstabiliteten har kunnat genomforas. De skrovformer som undersoks ar triangular form, rektang-elform samt cirkular form. En analys av resultatet visar att det ar triangulart tvarsnitt medtrubbig oppningsvinkel som uppvisar bast stabilitetsegenskaper vid sma krangningsvinklar. Vidstorre krangningsvinklar ar det halvcirkulara tvarsnittet att foredra.
For att forenkla berakningarna har fartygsskroven modellerats som tunna skivor, vilket ledertill att den del av skivorna som ligger under vattenlinjen, motsvarar undervattenkroppens volymoch centroiden for den del av skivan som ligger under vattenlinjen motsvarar lyftkraftens angrepps-punkt.
Utover de analytiska losningarna har aven ett MATLAB-program skrivits, avsett att bestamaen godtycklig skrovforms GZ-kurva. Slutligen har aven en experimentell undersokning genomfortsi syfte att forsoka verifiera den analytiskt beraknade GZ-kurvan for ett fall av det rektangularatvarsnittet.
1

Abstract
The significance of hull shapes for the stability of ships has, as a project for the course 5C1010Fordjupningsarbete i Mekanik, been examined. The stability properties examined refers to theships ability to return to an upright position after it has been forced to list (lean at an angle inthe direction of roll).
A measurement of the quality of the ships ability to stabilise itself is the GZ-curve, where GZis the right angled distance between the two forces that work on the ships hull. These forces arethe buoyancy and the force of gravity on the ship. These two forces are vertical but in oppositedirection to one another, thus creating a moment.
In this examination, the righting arm as function of the angle of list (GZ-curves) has beendetermined for three different hull shapes, a triangular, rectangular and half circular cross sections.An analysis of the results shows that the best hull shape for small angles of list is an obtusetriangular cross section whereas the half circular cross section is preferable for greater angles oflist.
The ship hull has been modelled as infinitesimally thin slices in order to simplify the calculations,which means that the part of the slices below the water line corresponds to the displacement andthe centroid of that part of the slice corresponds to the centre of buoyancy.
A MATLAB-program to numerically calculate the GZ-curve for arbitrary hull shapes has beenwritten. The results has also been experimentally examined with a test rig using a rectangularshaped hull.
2

Innehall
1 Inledning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42 Teori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1 Halvcirkel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Triangel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.3 Rektangel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Numerisk analys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.1 Del 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2 Del 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4 Experimentell undersokning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115 Resultat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.1 Analys 1, Samma deplacement, samma djupgaende och samma KG . . . . 135.2 Analys 2, Samma bredd i vattenlinjen och djupgaende . . . . . . . . . . . . 145.3 Analys 3, triangulart tvarsnitt . . . . . . . . . . . . . . . . . . . . . . . . . 155.4 Numerisk analys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165.5 Analys 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165.6 Analys 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175.7 Analys 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185.8 Experimentell undersokning . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6 Diskussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196.1 Analytiska resultat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196.2 Numerisk analys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196.3 Experimentell undersokning . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3

1 Inledning
En undersokning har gjorts avseende skrovformens inverkan pa ett fartygs stabilitet i lugnt vatten.Stabiliteten for ett fartyg ar ett matt pa dess formaga att aterfora fartygskroppen till uppratt lageefter det att ett palagt yttre krangande moment har upphort att verka.
Ett fartyg i stilla vatten paverkas av tva yttre krafter, dels tyngdkraften, som har sin an-greppspunkt i tyngdpunkten G, och dels lyftkraften som angriper i deplacementstyngdpunkten,vilken ar belagen i undervattenkroppens centroid. Da fartyget befinner sig i uppratt lage och ijamvikt, verkar dessa bada krafter langs skrovets centrumlinje samt ar, till beloppet lika stora ochmotriktade.
Om fartyget utsatts for en yttre kraft pa ett sadant satt att det kranger, forflyttas deplace-mentstyngdpunkten i den riktning krangningen sker, till foljd av att undervattenkroppens formforandras. I en sadan situation verkar inte langre tyngdkraften och lyftkraften langs samma lod-linje, varvid ett ratande moment i form av ett kraftpar uppstar.
I den undersokning som gjorts har det ratande momentets havarm, GZ beraknats som funktionav krangningsvinkeln och presenterats i s.k. GZ-kurvor [1]. Berakningar har genomforts for treenkla geometriska former av fartygsskrov och dessa har med hjalp av den grafiska presentationensedan bedomts med avseende pa stabilitet.
2 Teori
p
B GG
Figur 1: Ett fartyg som krangts. Trycket p integreras over skrovet till lyftkraften B.
Ett fartygs skrov kan i langsled delas upp i ett antal skivor. Om man later antalet skivor gamot oandligheten, gar tjockleken pa dessa mot noll. Berakningar av tvarskeppsstabiliteten for enenskild skiva kan da utforas genom geometriska berakningar i tva dimensioner.
Deplacement (per langdenhet) S0 fas som den area av skivan som befinner sig under vattenytan.Enligt Arkimedes princip ar S0 konstant. Darfor galler att det for en given krangningsvinkel α finnsen unik losning for formen pa den del av skivan som befinner sig under vattenytan. Problemet kanfor givna parametrar modelleras som ett problem med endast en frihetsgrad α.
Vattenlinjens lage som funktion av α kan bestammas med tva olika metoder.
• Arean under vattenlinjen, S, tecknas som funktion av vattenlinjens hojd och krangningsvinkelnα. Faktumet att arean under vattenlinjen skall vara oforandrad S = S0 utnyttjas for att skrivauttrycket for vattenytans hojd som funktion av krangningsvinkeln.
• Vid en viss krangningsvinkel α och hojd pa vattenlinjen kommer det till ursprungsarean S0
laggas till en area δS+ och dras ifran en area δS−. Sedan utnyttjas att
S0 + δS+ − δS− = S0 ⇒ δS+ = δS− (1)
4

Eftersom jamvikt rader i den kropp som utgor deplacementet, maste den av kringliggande tryckp, utovande lyftkraften B (se figur 1 och ekv. 2), angripa i deplacementtyngdpunkten i en riktningmotsatt tyngdkraftens.
B =∫
S
−pnds (2)
Da berakningarna genomfors i tva dimensioner pa infinitesimalt tunna skivor, saknar dessa massaoch darmed tyngdpunkt. I tva dimensioner motsvaras deplacementtyngdpunkten av centroiden tillden del av den infinitesimalt tunna skivan som befinner sig under vattenlinjen. Centroiden kanberaknas geometriskt [2]. Skivorna kan sagas paverkas av tva krafter. Dessa krafter verkar i enriktning parallell med dess yta. GZ ar det vinkelrata avstandet mellan de tva parallella krafternaB och den pa baten verkande tyngdkraften.
2.1 Halvcirkel
Detta tvarsnitt visar sig vara det enklaste fallet att berakna GZ-kurvan for. Deplacementet perlangdenhet beraknas enligt ekvation (3). Se aven figur 2.
S0 =r2 · (2 · arccosR− sin (2 · arccosR))
2(3)
r =
√2S0
2 · arccosR− sin (2 · arccosR)(4)
Ur figur 2 kan GZ bestammas till
Figur 2: Halvcirkulart tvarsnitt, deplacementsberakning och havarmen GZ
GZ = (r −KG) · sinα (5)
Den maximala krangningsvinkeln till
αmax = arcsinR (6)
innan vatten kommer upp pa vaderdack.
2.2 Triangel
Bestamning av lyftkraftens angreppspunkt i sidled. Ett initialt deplacement per langdenhet, S0,antags, och strackan b = d+ e bestams med sinussatsen (se fig. 3) till
b =a sin θsinφ
(7)
5

a c
ed
θ/2
VL
αγ φ
Figur 3: Triangulart tvarsnitt, lyftkraftsberakning
som tillsammans med areasatsen ger
S0 =a2 sin γ sin θ
2 · sinφ(8)
Los ut a ur ekv (8)
a =
√2 · S0 sinφsin γ sin θ
(9)
Med strackorna d och e ur figur 3, kan triangelns centroid, och tillika lyftkraftens angreppspunktBx beraknas
d = a cos γ (10)
e =a sin θsinφ
− a cos γ (11)
Bx =e− d
3=
13
(a sin θsinφ
− 2 · a cos γ)
(12)
Hjalpvinklarna γ och φ kan uttryckas i designparametern θ och krangningsvinkel α, vilket ledertill
Bx =a
3
(sin θ
cos(α+ θ/2)+ 2 · sin(α− θ/2)
)(13)
som ger GZ
GZ = Bx −KG sinα (14)
2.3 Rektangel
For rektangulart tvarsnitt har hela GZ kurvan beraknats. Tre fall har identifierats
Fall 1
Analysen delas upp i tva delar, hojden h1 pa den triangulara delen av undervattenskroppen bestamsenligt
h1 = b0 tanα (15)
och givet att deplacementet forblir S0 bestams h2 enligt
S0 = b0h2 +bh1
2⇒ (16)
⇒ h2 =S0
b0− b0 tanα
2(17)
6

s1
s2
s3
h2
h1
h0
b0/2
b0
b0/3
h1/3
GZ1
GZ2
α
Figur 4: Rektangulart tvarsnitt, bestamning av GZ. Fall 1
GZ1 beraknas till
s3 = (KG− h2) tanα (18)
s2 =h1 tanα
3(19)
s1 =b02− b0
3+ s2 − s3 (20)
GZ1 = s1 cosα =[b06
+h1 tanα
3− (KG− h2) tanα
]cosα (21)
For den rektangulara delen beraknas GZ2 till
GZ2 =(KG− h2
2
)sinα (22)
Centroiderna for triangeln och rektangeln viktas med respektive area. Rektangelns momentarmGZ2 ger ett moment i motsatt riktning och ger darfor ett negativt bidrag i det lage som figur 4visar.
A1 =h1b0
2(23)
A2 = h2b0 (24)
GZ =A1GZ1 −A2GZ2
S0= (25)
=h1b0
2
[b06
+h1 tanα
3− (KG− h2) tanα
]cosα− h2b0
[KG− h2
2
]sinα (26)
Fall 2
Forst definieras med hjalp av geometri och areaformeln for trianglar
S0 =h1b1
2⇒ (27)
⇒ h1 = b1 tanα (28)
7

h1
s1
s2
s3
b1
h0b0
h1/3 b1/3
GZ
α
Figur 5: Rektangulart tvarsnitt, bestamning av GZ. Fall 2
vilket leder till att
b1 =
√2S0
tanα(29)
Strackan s1 bestams
s3 = KG tanα (30)
s2 =h1 tanα
3(31)
s1 =(b02− b1
3+ s2 − s3
)=(b02− b1
3+h1 tanα
3−KG tanα
)(32)
(33)
Med detta bestams GZ till
GZ = s1 cosα =[b02− b1
3+h1 tanα
3−KG tanα
]cosα (34)
Fall 3
Analysen delas upp i tva delar, forst for den del av undervattenskroppen som utgor en rektangel
b2 =h0
tanα(35)
S0 = h0b1 +h0b2
2⇒ b1 =
S0
h0− h0
2 tanα(36)
8

b1
b2
h0
h0/2
h0/3
b1/2
b2/3
GZ1
GZ2
Figur 6: Rektangulart tvarsnitt, bestamning av GZ. Fall 3
A1 = h0b1 (37)
s3 =b12− h0 tanα
2(38)
s2 = KG tanα (39)
s1 =b02− s2 − s3 (40)
GZ1 = s1 cosα (41)
och for triangeln
A2 =h0b2
2(42)
s4 =b23− h0 tanα
3(43)
s5 =b02− b1− s4 − s2 (44)
GZ2 = s5 cosα (45)
vilket ger, viktat med areorna, GZ
GZ =A1s1 cosα+A2s5 cosα
S0(46)
9

3 Numerisk analys
Ett program for losning av generella skrovformer har konstruerats. Skrovets form anges som ettantal rektangulart utformade omraden. Alla med samma hojd men variabel bredd. Programmetantar symmetri varfor endast halva skrovet specificeras. Programmet ar uppdelat i tva delar. En(del 1) som raknar ut hur skrovet ligger i forhallande till vattenlinjen vid en viss vinkel och en (del2) som beraknar deplacementtyngdpunktens vinkelrata projektion pa vattenlinjen.
3.1 Del 1
ξ
α δS+
δS-
Figur 7: Del 1
Ekv. 1 utnyttjas for att via en iterativ process rakna ut ξ (se figur 7). Genom att, for en givenvinkel α, valja ett varde pa ξ fas
S − S0 = δS+ − δS− (47)
Programmet gor sedan “smarta” gissningar for ξ tills
S − S0 < Sfel (48)
Dar Sfel ar nagon given noggrannhet.
3.2 Del 2
A
BC
Figur 8: Del 2
Omradets moment med avseende pa skiljelinjen mellan B och C (se figur 8) beraknas for varderaett av omradena A,B och C. Det kan alltsa sagas att om r ar ett omrades tyngdpunkt projiceratvinkelrat pa denna skiljelinje fas det totala momentet som
mArA +mB rB +mC rC (49)
10

Avstandet till deplacementets tyngdpunkt fas som
mArA +mB rB +mC rCmA +mB +mC
(50)
For att fa avstandet mellan deplacementet och fartygets tyngdpunkt adderas det vinkelrata av-standet mellan skiljelinjen och G
mA (rA + rG) +mB (rB + rG) +mC (rC + rG)mA +mB +mC
=mArA +mB rB +mC rC
mA +mB +mC+ rG (51)
4 Experimentell undersokning
For att forsoka verifiera berakningarna har en experimentell undersokning genomforts. En testriggfor bestamning av GZ som funktion av krangningsvinkel har byggts (se figur 9 och 10). En konstantkraft, i experimentet anvands en tyngd med samma massa som batskrovet, angriper i en flyttbarpunkt. Eftersom den palagda kraften ar konstant och lika stor som ladans tyngd, kan batskrovetmodelleras ha dubbla tyngden. For att jamvikt ska rada maste lyftkraftens angreppspunkt liggapa halva avstandet mellan G och den palagda kraftens angreppspunkt, vilket ger vardet pa GZ.Den palagda kraftens angreppspunkt flyttas och krangningsvinkeln mats (se figur 11).
α
Figur 9: Testrigg for att bestamma GZ som funktion av krangningsvinkel
11

Figur 10: Testrigg
Figur 11: Matning av krangningsvinkel
12

5 Resultat
5.1 Analys 1, Samma deplacement, samma djupgaende och samma KG
Analys 1 utgar fran ett initialt deplacement per langdenhet S0 = 3, djupgaende V L = 1/3r ≈0.98413, dar r ar halvcirkelns radie och KG = V L/2.
Figur 12: Tvarsnitt for analys 1
0 20 40 60 80
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6 HalvcirkelRektangelTriangel
Figur 13: Samma deplacement och samma djupgaende for de tre skrovformerna
Ur analysen kan utlasas (se figur 13), att triangular skrovform uppvisar goda stabilitetsegen-skaper vid laga krangningsvinklar, men att skrovsidorna snabbt maste vara langa. Under dessaforhallanden ar rektangulart tvarsnitt samst ur stabilitetssynpunkt.
13
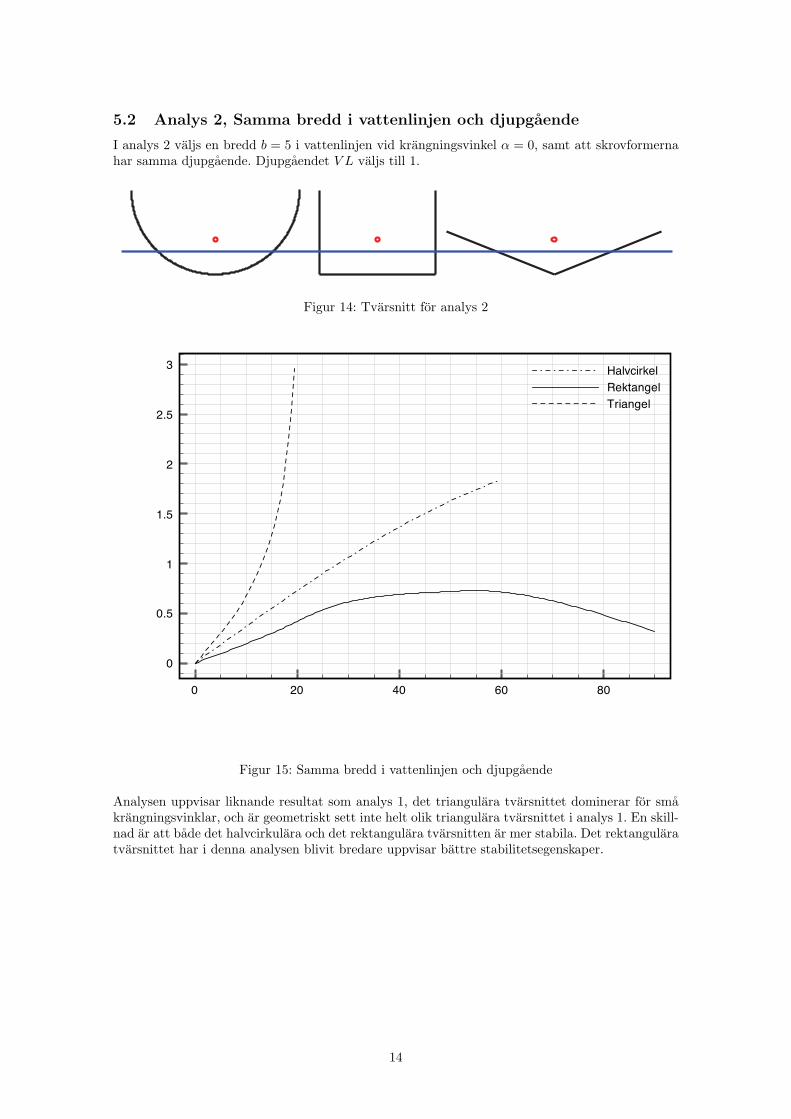
5.2 Analys 2, Samma bredd i vattenlinjen och djupgaende
I analys 2 valjs en bredd b = 5 i vattenlinjen vid krangningsvinkel α = 0, samt att skrovformernahar samma djupgaende. Djupgaendet V L valjs till 1.
Figur 14: Tvarsnitt for analys 2
0 20 40 60 80
0
0.5
1
1.5
2
2.5
3 HalvcirkelRektangelTriangel
Figur 15: Samma bredd i vattenlinjen och djupgaende
Analysen uppvisar liknande resultat som analys 1, det triangulara tvarsnittet dominerar for smakrangningsvinklar, och ar geometriskt sett inte helt olik triangulara tvarsnittet i analys 1. En skill-nad ar att bade det halvcirkulara och det rektangulara tvarsnitten ar mer stabila. Det rektangularatvarsnittet har i denna analysen blivit bredare uppvisar battre stabilitetsegenskaper.
14

5.3 Analys 3, triangulart tvarsnitt
I analysen jamfors tre olika oppningsvinklar i ett triangulart tvarsnitt. Alla tre har samma depla-cement och KG. Det som skiljer dem at ar att ju spetsigare vinkel desto hogre V L.
Figur 16: Tvarsnitt for analys 3
0 20 40 60 80-0.2
0
0.2
0.4
0.6
0.8
1 120 grader90 grader45 grader
Figur 17: GZ for skrov med triangulart tvarsnitt med olika oppningsvinklar
Tvarsnitt med spetsig oppningsvinkel visar sig mer instabila for sma krangningsvinklar men kankrangas langre innan vatten nar vaderdack.
15
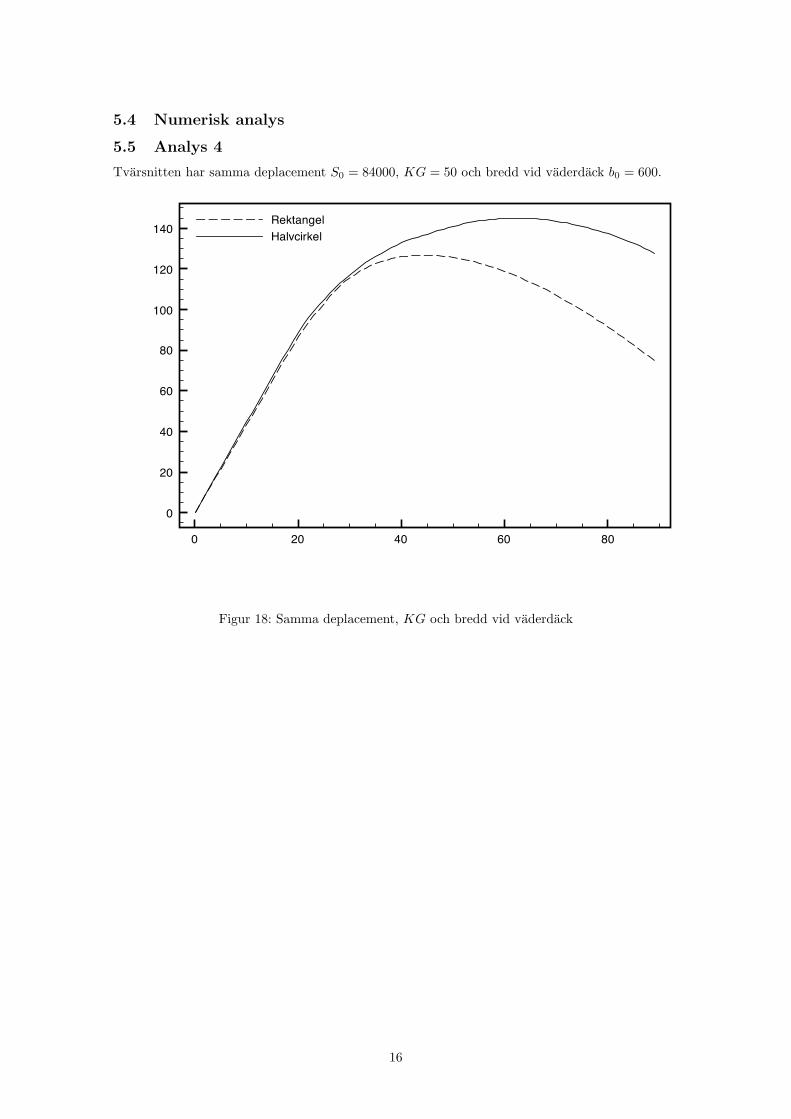
5.4 Numerisk analys
5.5 Analys 4
Tvarsnitten har samma deplacement S0 = 84000, KG = 50 och bredd vid vaderdack b0 = 600.
0 20 40 60 80
0
20
40
60
80
100
120
140RektangelHalvcirkel
Figur 18: Samma deplacement, KG och bredd vid vaderdack
16

5.6 Analys 5
I denna analys har tvarsnitten samma KG = 100, V L = 150 och bredd vid vaderdack b0 = 600samt rektangelns hojd samma som halvcirkulara tvarsnittets radie.
0 20 40 60 80
0
20
40
60
80
100
120
RektangelHalvcirkel
Figur 19: Samma KG, V L och hojd over V L
Analys 4 och 5 visar att det halvcirkulara tvarsnittet ger battre stabilitet for alla krangningsvinklarmellan 0◦ och 90◦.
17

5.7 Analys 6
En analys for en mer realistiskt smabats tvarsnitt. KG ar markerad som en cirkel i figur 20.
Figur 20: Tvarsnittet for analys 6
0 20 40 60 80Krängningsvinkel [°]
0
1
2
3
4
5
GZ
[m]
Figur 21: GZ som funktion av krangningsvinkel for analys 6
18

5.8 Experimentell undersokning
Ett antal matningar i experimentella undersokningen resulterar i en kurva som ligger nagot un-der den analytiska losningen. Modellen for batskrovet som undersoktes saknade vaderdack darforavbrots matningarna precis innan modellen tog in vatten, vilket for de parametrar modellen varbyggd enligt, sker vid 22◦.
0 20 40 60 80
0
0.01
0.02
0.03
0.04
AnalytiskExperimentell
Figur 22: Jamforelse mellan analytiskt resultat och experimentellt framtagna data
6 Diskussion
6.1 Analytiska resultat
Analytiska resultat for det halvcirkulara och triangulara tvarsnittet saknar berakningar for vaderdack.For det rektangulara tvarsnittet har tre fall beraknats, men det finns ett ytterligare fall som kanintraffa om vattenlinjen ligger hogre an halva skrovsidan.
6.2 Numerisk analys
Eftersom analytisk losning endast ar fullstandigt framtagen for det rektangulara tvarsnittet harMATLAB-programmet bara kunnat kontrollerats mot sadana fall, samt for halvcirkulart tvarsnittupp till vaderdack. Det har dock visat brister for det triangulara tvarsnittet. Mot bakgrund avdetta kan den numeriska analysen inte anses vara totalt palitlig.
6.3 Experimentell undersokning
Resultatet ligger nagot under den analytiska losningen, mojlig orsak till detta kan vara friktion itrissor.
19

Litteraturforteckning
[1] Forsvarsmakten (2005), Larobok i Fartygsstabilitet. Stockholm, Forsvarsmakten.
[2] Rade och Westergren (1988, 2004), Mathematics Handbook for Science and Engineering, Beta.Lund, Studentlitteratur.
20