failure tolerancetschwarz/coen 317/failure.pdf · • chandy and lamport: distributed snapshot ......
TRANSCRIPT

Failure ToleranceDistributed Systems
Santa Clara University

Distributed Checkpointing

Distributed Checkpointing• Capture the global state of a distributed system • Chandy and Lamport: Distributed snapshot
• Reflects a consistent, global state • If process P has received a message from Q • Then global state should show that process Q
sent a message to process P

Distributed Checkpointing• Global state presented by a cut
• Consistent cuts: • Messages shown received are shown sent • Messages shown sent are either
• received or • in transit

Distributed Checkpointing

Distributed Checkpointing• Represent distributed system as a system of
processes connected by unidirectional point-to-point
communication
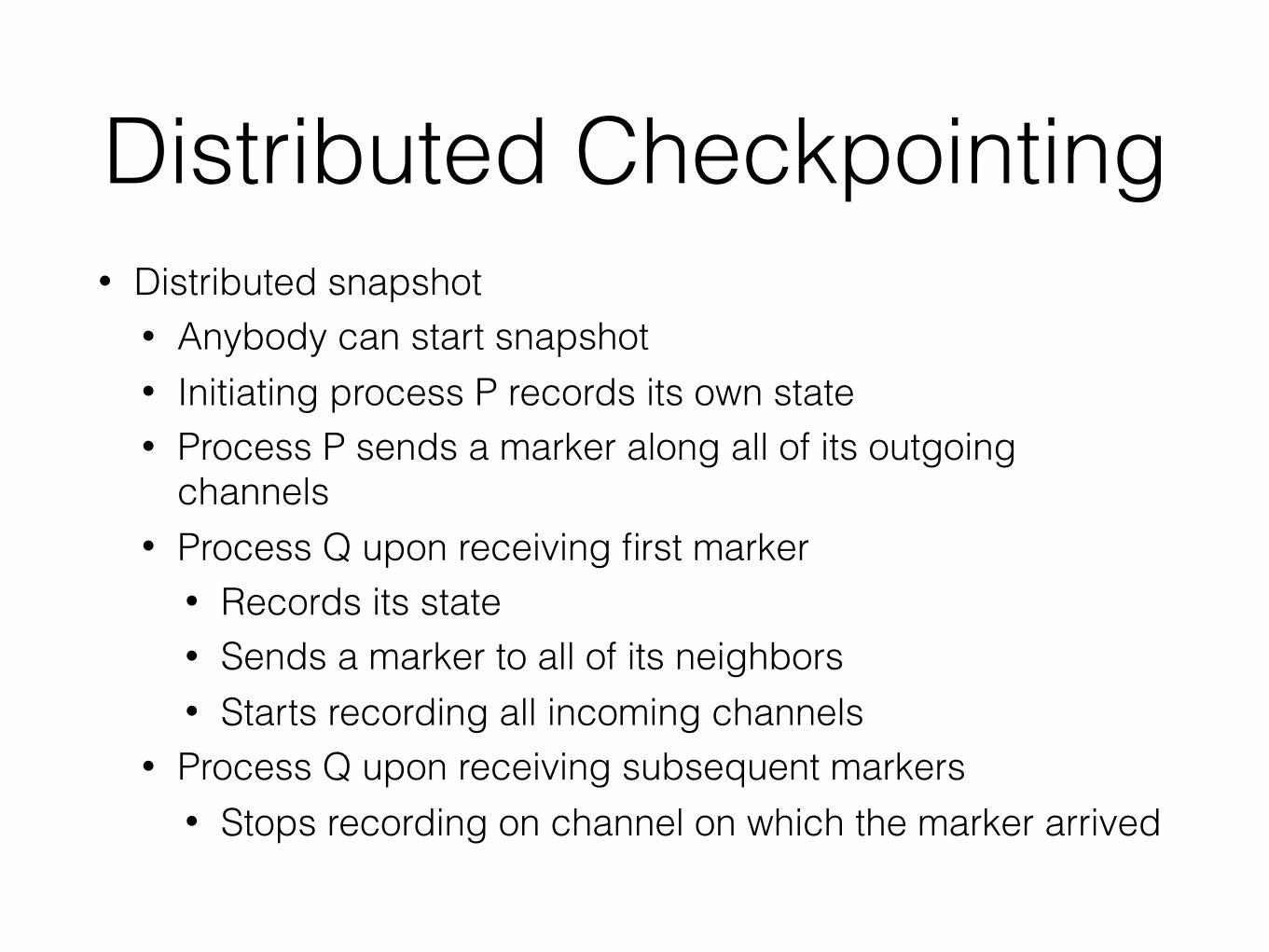
Distributed Checkpointing• Distributed snapshot
• Anybody can start snapshot • Initiating process P records its own state • Process P sends a marker along all of its outgoing
channels • Process Q upon receiving first marker
• Records its state • Sends a marker to all of its neighbors • Starts recording all incoming channels
• Process Q upon receiving subsequent markers • Stops recording on channel on which the marker arrived

Distributed Checkpointing• Process Q upon receiving last marker
• Send • own state • messages on channels monitored
• to the initiating state

Distributed Checkpointing

Distributed Checkpointing• Termination Detection:
• Use snapshot protocol • If Q receives a marker for the first time
• Sending process becomes its predecessors • If Q is done with the snapshot, sends a DONE
message to predecessor • This still allows for messages in transit

Distributed Checkpointing• Termination detection:
• Need snapshot where all channels are empty • Q returns DONE only if
• All of Q’s successors have returned a DONE message
• Q has not received any message between the point it recorded its state and the point it had received the marker along each of its incoming channel
• In all other cases, Q sends a CONTINUE message

Distributed Checkpointing• Termination detection
• When initiating process receives only DONE messages • No regular messages are in transit • Thus, computation is terminated

Failure Types• Dependability consists of
• Availability • System is ready to be used
• Reliability • System can run continually without failure
• Safety • In a failure condition, nothing catastrophic
happens • Maintainability
• How easy can a failed system be repaired

Failure Types• Dependability:
• System that breaks down for a millisecond every hour • Availability > 99.9999 % • Reliability is low
• System breaks down only for two weeks every July • Availability ~ 96% • Reliability is high

Failure Types• Failure: system cannot meet its promises • Error: part of the system state that may lead to a
failure • Fault: cause of an error

Failure Types• Transient faults
• occur once and the disappear • If the operation is repeated, fault goes away • Example:
• Bird flies through the beam of a microwave transmitter • and possibly gets roasted

Failure Types• Intermittent fault
• Fault occurs • Goes away • Fault returns

Failure Types• Permanent fault
• Fault appears • Continues to exist until the faulty component is
repaired
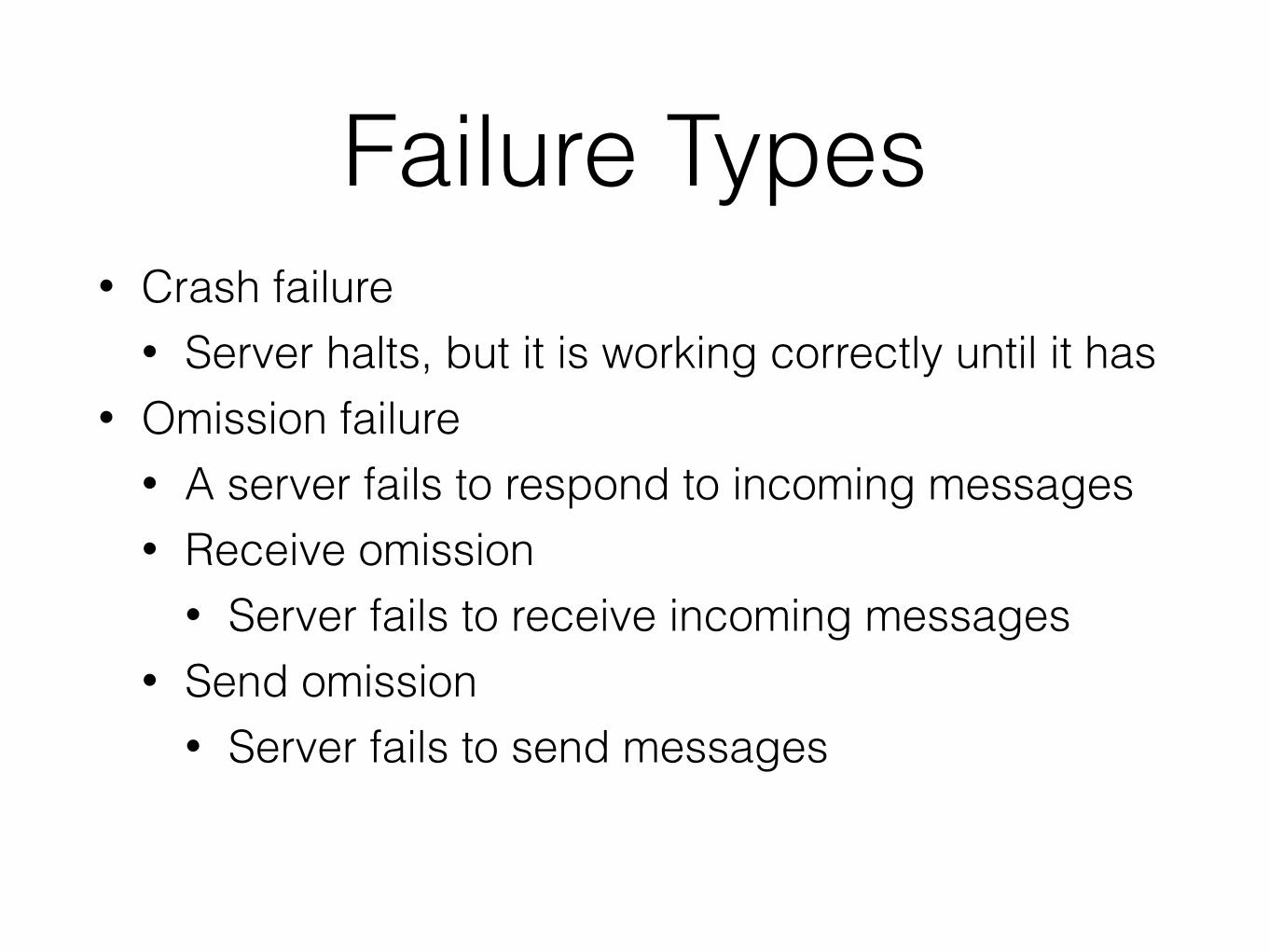
Failure Types• Crash failure
• Server halts, but it is working correctly until it has • Omission failure
• A server fails to respond to incoming messages • Receive omission
• Server fails to receive incoming messages • Send omission
• Server fails to send messages

Failure Types• Timing failure
• A server’s response lies outside the specified time interval • Response failure
• A server’s response is incorrect • Value failure
• The value of the response is wrong • State transition failure
• The server deviates from the correct flow of control • Arbitrary / Byzantine failure
• A server may produce arbitrary responses at arbitrary times

Failure Types• Fail-stop failure
• Fail stop server stops producing output • Others can detect this state
• Fail-silent failure • Fail silent server stops producing output • Others cannot distinguish this from a server that is
slow • Fail-safe failure:
• Server acts arbitrarily • But other servers can recognize its output as false

Failure Masking• Failure masking by redundancy
• Erasure correcting codes • Replication

Failure MaskingTriple Modular Redundancy

Process Resilience• Organize processes into groups
• Groups can be • dynamic • run membership protocols • hierarchical

Process Resilience
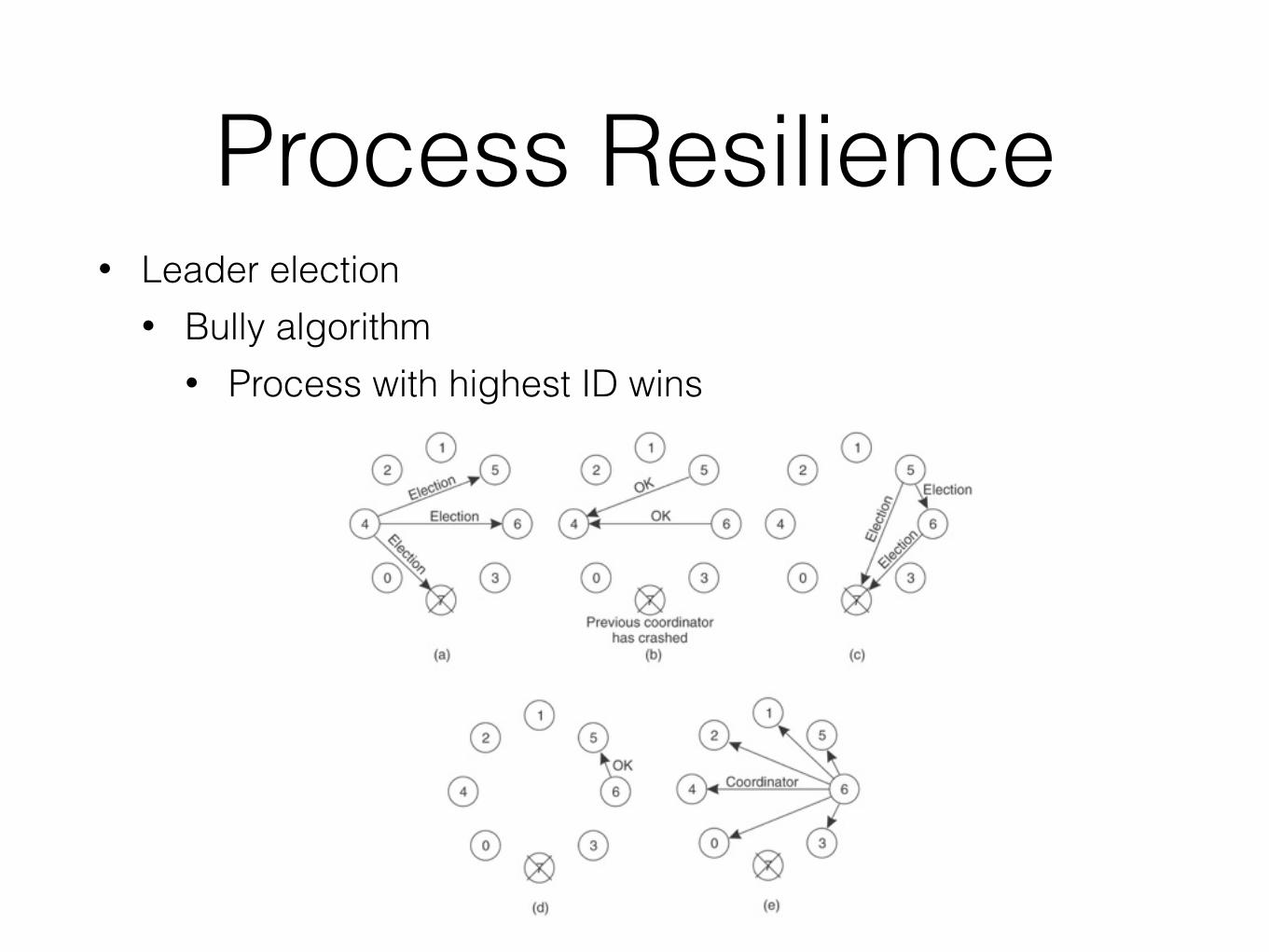
Process Resilience• Leader election
• Bully algorithm • Process with highest ID wins

Process Resilience• Leader Election using a ring

Process Resilience• Agreement in Faulty Systems

Process Resilience• Byzantine general problem
• In the presence of byzantine failure • Can only decide on a single value is >2/3 of
the participants are not faulty

Process Resilience• Byzantine General Problem;
• Lamport algorithm • Each process has to share a value with all
others • But processes can lie and can misrepresent
their value • Goal: All processes accept values from the
non-faulty processes

Process Resilience• Lamport algorithm (1982)
• Each process sends its value to all other processes
• Values are gathered into vectors • Each process sends these vectors to everybody
else • Every process accepts values with a majority

Process Resilience

Process Resilience

Reliable Group Communication
• Problem: • How to get messages to the members of a
process group • Reliable multicasting
• Without process failures: • Problem assumes that there is a join and
leave protocol for processes • Often: members receive messages in exactly
the same order

Reliable Group Communication
Simple solution if all receivers are known and assumed to not fail

Reliable Group Communication
• Tradeoffs: • Explicit retransmission requests or
retransmissions when acks are missing • Use multicast or point-to-point transmission for
retransmissions • Use piggy-backing in order save network
bandwidth

Reliable Group Communication
• Scalability in Reliable Multicasting • Simple scheme cannot support large numbers • Optimization:
• Get rid of acks • Only send retransmission requests • Difficult to get messages out of history buffer.
• Use cumulative acks

Reliable Group Communication
• Scalability in reliable multicasting • Feedback suppression • Implemented in Scalable Reliable Multicasting
(SRM) by Floyd (97) • Never ack receipt of messages • Whenever a process sends a retransmission
request (NACK), it multicasts to everyone • Servers that receive this multicast suppress
their own NACK message

Reliable Group Communication

Reliable Group Communication
• Feedback suppression scales reasonably well • Problems:
• Receivers need to schedule feedback messages accurately • Otherwise, too many will send out their NACK
anyway • Feedback still interrupts processes that received the
message • Could form a separate multicast process for those
that have not received • But that is difficult to do over a wide area network

Reliable Group Communication
• Hierarchical Feedback Control

Reliable Group Communication
• Atomic multicast (in the presence of failures) • Make a distinction between receiving and
delivering a message

Reliable Group Communication
• Each message is associated with a group view • The processes on the delivery list
• Changes in group membership • Announced by a group view change message
• Problem: • Message based on old group view needs to be
delivered before the group view change message is delivered

Reliable Group Communication
• Virtual Synchronicity • Reliable multicast where multicast message to a
group view G is delivered to all non-faulty processes in G

Reliable Group Communication

Reliable Group Communication
• Gives several possibilities for ordering • Unordered multicasts • Fifo ordered multicasts • Causally-ordered multicasts • Totally-ordered multicasts

Reliable Group Communication
• Virtually synchronous reliable multicasting with totally-ordered delivery of messages is called
• Atomic multicasting

Reliable Group Communication
• ISIS: Implementing atomic multicast • Build on TCP as a reliable point-to-point
communication • Assumes that messages sent out by a sender
arrive in that order (TCP property) • Multicasting message with group view
• Same as sending individual messages to all members in the group

Reliable Group Communication
• Processes keep messages until they know that every other process has received m • In that case m is stable • ONLY STABLE MESSAGES ARE DELIVERED
• This is also true for view-change messages • Forwarding of messages guarantees that a
message delivered to one non-faulty process is received by everyone in the group
• Can require any process to send message to all members of the group

Reliable Group Communication

Reliable Group Communication
• Processing a group change • Process receives group change message
• Forwards any unstable message for the old group to all processes in the new group and marks them as stable • ISIS / TCP assumes that these messages are
never lost • All messages to the old group received by one
process are therefore guaranteed to be received by all non-faulty process in the old group

Reliable Group Communication
• When process P no longer has unstable messages: • Multicasts a flush message to the new group • When P receives flush messages from all
members of the new group, it installs the new view

Reliable Group Communication

Reliable Group Communication
• When process Q receives message sent to the old group • If Q still believes itself to be in the old group:
• Delivers message (unless it has already received it and considers it a duplicate)
• If Q has received view change message • Forwards any unstable message • Then sends flush message to the new group

Reliable Group Communication
• Need more protocol in order to deal with failure during a view change
• Details in Birman’s book or the papers on ISIS

Checkpointing• Revocery
• Forward recovery • Bring system to a new, failure free state
• Backward recovery • Bring system back to an old, failure free state
and start over

Checkpointing• Distributed snapshot to establish recovery line

Checkpointing• Domino effect
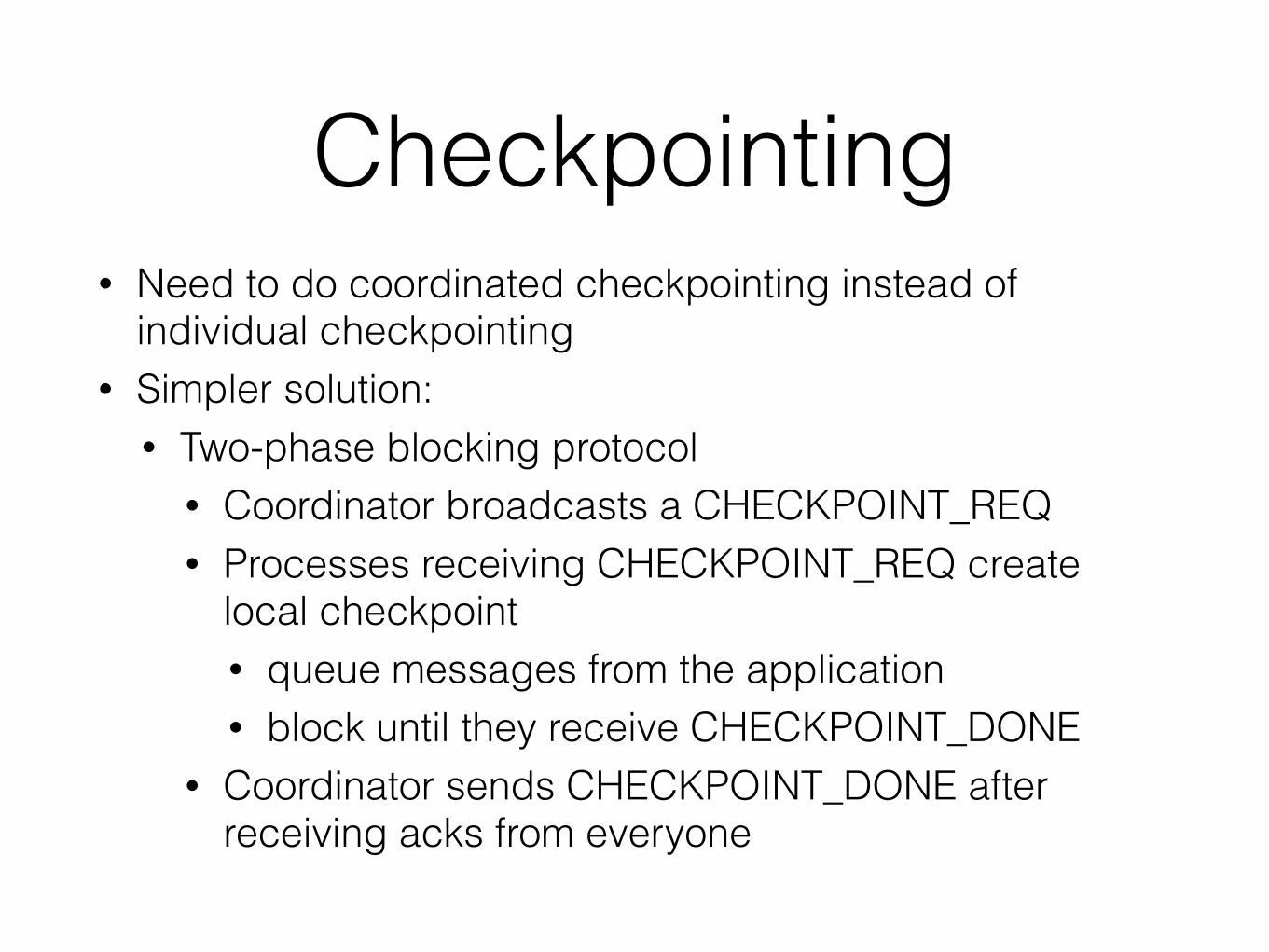
Checkpointing• Need to do coordinated checkpointing instead of
individual checkpointing • Simpler solution:
• Two-phase blocking protocol • Coordinator broadcasts a CHECKPOINT_REQ • Processes receiving CHECKPOINT_REQ create
local checkpoint • queue messages from the application • block until they receive CHECKPOINT_DONE
• Coordinator sends CHECKPOINT_DONE after receiving acks from everyone

Checkpointing• Techniques used to reduce checkpoints
• Message logging • Can lead to orphans
Checkpointing• Pessimistic logging protocols
• Ensure that for each non-stable message there is at most one process depending on it
• Optimistic logging protocols • Any orphan process depending on some
message is rolled back until it now longer depend on the message