faculty of mechanical and power engineering frequency...
TRANSCRIPT

© D
r in
Ŝ. J
AN
USZ
LIC
HO
TA
CO
NT
RO
L SY
STEM
S Fre
quency
resp
onse
meth
ods
Faculty of Mechanical and Power Engineering
Wro
cław
2007

CO
NT
ENS
•F
req
uen
cyre
spo
nse
so
fsy
stem
s, n
eed
an
dm
eth
od
•T
yp
es
–B
od
e p
lot
–�
yq
uis
tp
lot
–�
ich
ols
plo
t (c
ha
rt)
–B
lack
plo
t
•F
req
uen
cyre
spo
nse
so
fb
asi
ctr
an
sfer
fu
nct
ion
s
•F
req
uen
cy r
esp
on
ses
-su
mm
ary
•R
ela
tio
n b
etw
een
step
an
d f
req
uen
cyre
spo
nse
•�
on
-min
imu
m p
ha
sesy
stem
s
•R
eal
freq
uen
cy r
esp
on
ses
for
elec
tric
al,
th
erm
al
an
dm
ech
an
ica
l sy
stem
s

Fre
quency
plo
t?W
hat
is
this
?
Fre
qu
ency
resp
on
seo
fa
syst
em i
sd
efin
ed
as t
he
stea
dy
–st
ate
resp
on
se o
f th
e sy
stem
to
a si
nu
soid
al i
np
ut

Why
do
we
nee
d
freq
uen
cy r
espo
nse
plo
ts?

Why
we
need f
requency
resp
onse
plo
ts?
Fre
qu
ency
res
po
nse
can
ex
actl
y i
den
tify
syst
em
(id
enti
fyd
yn
am
ic p
rop
erti
es o
f a
syst
em
)
It i
s u
sed
in
co
ntr
oll
er t
un
ing
–co
ntr
ol
syst
em
mu
st h
ave
go
od
per
form
ance
e.g
. S
usp
ensi
on
in
a
car
mu
st r
edu
ce u
nd
esir
ed n
ois
e an
d r
oad
dis
turb
ance
s.
Dis
turb
ance
s ar
e ch
ang
ing
dir
ecti
on
of
a ro
bo
t m
ov
em
en
t.
Fre
qu
ency
resp
on
sesh
ow
sh
ow
incr
easi
ng
in
pu
t fr
equ
ency
infl
uen
ces
ou
tpu
tsi
gn
al–
the
des
ign
of
a
syst
em
in
th
e fr
equ
ency
do
mai
n p
rov
ides
th
e d
esig
ner
wit
h c
on
tro
l o
f th
e b
and
wid
th o
f a
syst
em
.
Ex
amp
le–
bu
idin
gan
do
uts
ide
tem
per
atu
rech
ang
e.
In t
hat
way
des
ign
er c
anse
lect
ban
dw
idth
and
per
form
ace
of
a co
ntr
ol
syst
em
.
Itsh
ow
sre
son
an
tfr
equ
ency
.
Itis
use
din
sta
bil
ity
anal
ysi
s.

Why
we
need f
requency
resp
onse
plo
ts?
Dis
adv
anta
ge:
in
dir
ect
lin
k b
etw
een
th
e fr
equ
ency
and
th
e ti
me
do
mai
n

HO
W
to o
bta
in f
requ
ency
res
ponse
?

System
u(t)
t
y(t)
t
Input
Output
u(t
)=si
n (ω ωωω
t)y
(t)=
A(ω ωωω
)sin
(ω ωωωt+ϕ ϕϕϕ
(ω ωωω))
ω-
ang
ula
r fr
equ
ency
inra
dia
ns
per
sec
on
d, ϕ
-p
has
ean
gle
, A
-am
pli
tud
e
FR
EQ
UEN
CY
RESP
ON
SEH
ow t
o ob
tain
fre
quency
resp
onse
?

xt
At
()
sin
()
=1
ω
yt
At
()
sin
()
=+
2ω
φ
FR
EQ
UEN
CY
RESP
ON
SE
How
toob
tain
fre
quency
resp
onse
?In
pu
t si
gn
alh
asam
pli
tud
eA
1an
d f
req
uen
cyω
Ou
tpu
t si
gn
al h
as a
mp
litu
de
A2
and
ph
ase-
shif
tϕ
.
Syst
em
Ou
tpu
t si
gn
al
Plo
t
Inp
ut
sign
al
Mu
ltip
lex
er
Inp
ut
sign
al
Inp
ut
sign
al
Ou
tpu
t
sign
al
T
A2
A1
τ

22
fTπ
ωπ
==
Rel
atio
nb
etw
een
ang
ula
r fr
equ
ency
ω,
freq
uen
cyf
and
tim
eco
nst
ant
T
FR
EQ
UEN
CY
RESP
ON
SE
How
toob
tain
fre
quency
resp
onse
?
ph
ase-
shif
tϕ
2 Tπτϕ=
Inp
ut
sign
al
1 r
ad/s
Ou
tpu
t
sign
al
T
A2
A1
τ
Sy
mb
ols
an
d u
nit
s–
ang
ula
rfr
equ
ency
ωra
d/s
, fr
equ
ency
f,H
z=1
/s,
tim
e co
nst
ant
T, s,
ph
ase-
shif
t
ϕ,
rad
1 r
ad/s
= 2π
rad
/ 6
.28
s

Geometrical description

FR
EQ
UEN
CY
RESP
ON
SE
How
toob
tain
fre
quency
resp
onse
?W
hat
can
we
do
wit
h n
um
ber
sA
1, A
2, ω
, ϕ
?
Mag
nit
ud
e
2
1()
()
AM
A
ωω
=
sho
ws
ho
wou
tpu
tam
pli
tud
eA
2is
ch
ang
ing
, w
hen
fre
qu
ency
in
crea
ses.
Ph
ase-
shif
tϕ
(ω)
sho
ws
ho
wou
tpu
tsi
gn
alis
del
ayed
ver
sus
inp
ut
sig
nal
.
Th
e au
die
nce
isth
ink
ing
...

FR
EQ
UEN
CY
RESP
ON
SE
Bod
e p
lot
Bo
de
plo
t, 1
92
7, sh
ow
in
tw
o d
iffe
ren
tfi
gu
res
rela
tio
nb
etw
een
ph
ase-
shitϕ
and
freq
uen
cyω
as f
ar
as m
agn
itu
de
M a
nd
fre
qu
ency
ϕ=
ϕ(ω
),
M=
M (ω
)
Mag
nit
ud
eM
ver
sus
freq
uen
cyω
, d
B (
dec
ibel
)
20
lo
g M
(ω)
Matlab command
»bode([1],[1 1])
Ph
ase-
shif
tϕ
(ω),
An
gu
lar
freq
uen
cyin
log
arit
hm
ic s
cale
ω,
rad/s
(lo
gar
itm
ic s
cal
e p
ort
rayal
s b
road
er b
and
wid
th t
hen l
inea
r sc
ale)

FR
EQ
UEN
CY
RESP
ON
SE
Bod
eplo
t
0.0
1-4
0
0.1
-20
0.3
2-1
0
0.5
-6
0.7
-3
10
1.4
3
26
3.1
61
0
10
20
10
04
0
10
00
60
20
lo
g M
(ω),
dB
M(ω
)
Dec
ibel
-w
hat
is
it??
On
e te
nth
of
the
bel
...

FR
EQ
UEN
CY
RESP
ON
SE
Bod
eplo
t
1 d
ecad
e1
dec
ade
Bo
de
plo
t is
kn
ow
ns
as l
og
arit
mic
char
acte
rist
ic o
fa
mag
nit
ud
ean
dp
has
e

FR
EQ
UEN
CY
RESP
ON
SE
Bod
eplo
t
Ou
tpu
t si
gn
al a
mp
litu
de
dec
reas
es
as a
fu
nct
ion
of
a fr
equ
ency
ω=
10
rad
/s,
-20
dB
,
Ph
ase-
shif
tin
crea
ses
as a
fun
ctio
n o
fa
freq
uen
cy
ϕ=
84
°
Act
ual
rati
oo
fin
pu
tsi
gn
alan
do
utp
ut
sig
nal
am
pli
tud
eatω
=1
0 r
ad/s
is
20
lo
g M
(ω)=
-20
dB
Lo
g M
(ω)
= -
1
M(ω
) =
10
-1

FR
EQ
UEN
CY
RESP
ON
SE
Bod
eplo
t
Act
ual
lyat
ω=
10
rad
/s
We
ob
serv
eM
(ω)
= 1
0-1
.
system
1/(s+1)

FR
EQ
UEN
CY
RESP
ON
SE
Nyq
uis
t plo
t
�y
qu
ist
plo
t –
freq
uen
cyω
isp
aram
eter
. W
e ca
n p
lot
rela
tio
n((
M(ω
), ϕ
(ω)
)
in p
ola
rco
ord
inat
es
ϕ(ω
)
M(ω
)
ω=
0
ω<
0
ω>
0
ω=∞
On
e p
oin
t o
n N
yq
uis
t cu
rve
is o
ne
mea
sure
men
t o
f
inp
ut
and
ou
tpu
t si
gn
al
Matlab command
»nyquist([1],[1 1])

A2=
0.7
5A
1=
1
τ=0
.7 s
M(ω
)=0
.75
FR
EQ
UEN
CY
RESP
ON
SE
Nyq
uis
tplo
t
20
.70
.76
.28
πϕ=
=
T=
6.2
8 s
Rad
= 4
0°
M(ω
)=0
.75
40
°
In F
ig.
ther
e ar
ev
alu
es
�y
qu
ist
plo
t is
cal
led
am
pli
tud
e-p
has
e
char
acte
rist
ic

Matlab command
»nichols([1],[1 1])
FR
EQ
UEN
CY
RESP
ON
SE
Nic
hol
s plo
t�
ich
ols
plo
tis
rela
tio
nb
etw
een
mag
nit
ud
eM
in
dB
and
ph
ase-
shif
tin
deg
rees

FR
EQ
UEN
CY
RESP
ON
SE
Nic
hol
splo
t (c
har
t)N
ich
ols
ch
art
allo
ws
to e
stim
ate
ga
in a
nd
ph
ase
ma
rgin
, m
agn
itu
de
of
clo
sed
-lo
op
co
ntr
ol
syst
em
dis
tan
ce
fro
m1
an
dre
son
an
tm
ag
nit
ud
e(l
oo
kat
aB
od
ep
lot)
on
th
eb
ase
of
op
en-l
oo
pco
ntr
ol
syst
em
fre
qu
ency
res
po
nse
.
Gri
do
fli
nes
wit
h c
on
stan
t
ma
gn
itu
de
M (ω
)an
d
ph
ase
ϕ(ω
)
for
clo
sed
-lo
op
con
tro
lsy
stem
tran
sfer
fu
nct
ion
.

FR
EQ
UEN
CY
RESP
ON
SE
Nic
hol
splo
t (c
har
t)
Mag
nit
ud
e m
arg
in6
dB
ph
ase
mar
gin
30
°.

FR
EQ
UEN
CY
RESP
ON
SE
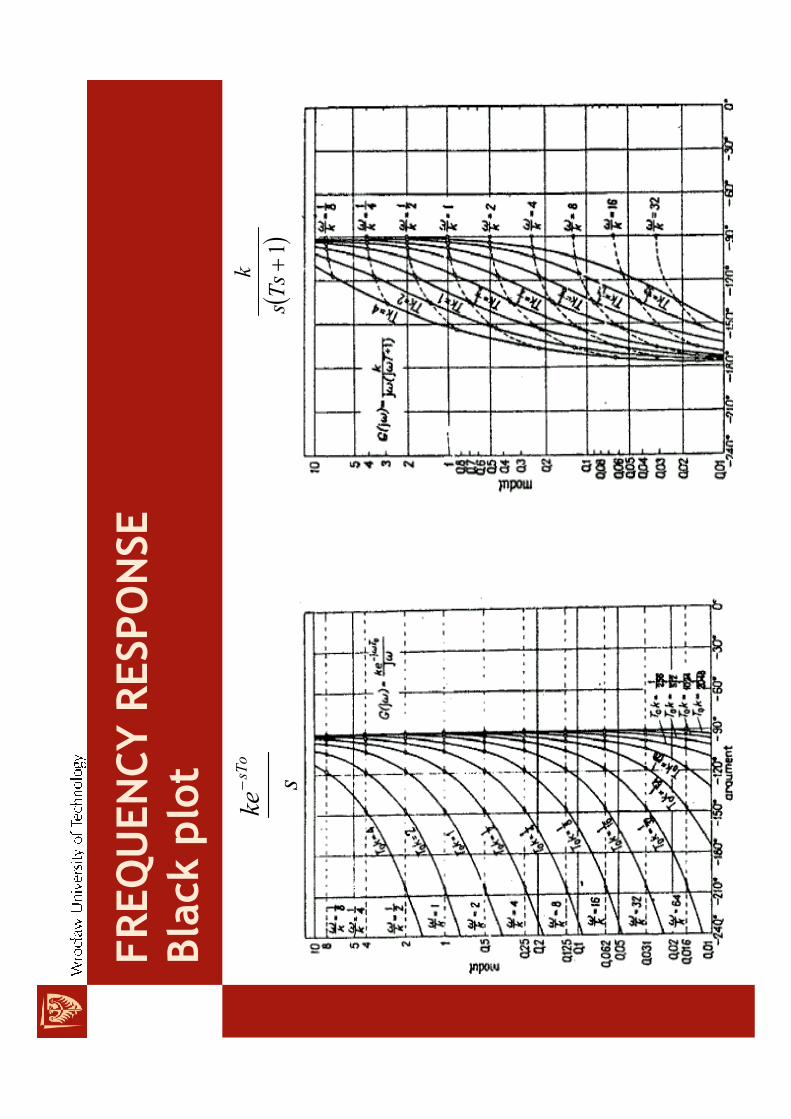
Bla
ck p
lot
1+
−
Tse
sTo
()n
Ts
1
1 +
M(ω
)
ϕ(ω
)
M(ω
)
ϕ(ω
)
Bla
ck p
lot
is g
rap
hic
al r
epre
sen
tati
on
of
a fu
nct
ion
M(ϕ
(ω))
in
cart
esia
nco
ord
inat
esy
stem
.
s
kesT
o−
()
1+
Ts
s
k
FR
EQ
UEN
CY
RESP
ON
SE
Bla
ckplo
t

FR
EQ
UEN
CY
RESP
ON
SE P
LOT
SSu
mm
ary
Th
ree
var
iab
lesω
, M
, ϕ
. O
ne
of
them
isp
aram
eter
, an
oth
ertw
o a
rear
eu
sed
infu
nct
ion
.
�y
qu
ist
plo
t(
|G (ω
) |, ϕ
(ω)
) =
((
M(ω
), ϕ
(ω)
)
(plo
t in
circ
ula
r(p
ola
r) c
oo
rdin
ate
syst
em
)
Bo
de
plo
tϕ
= ϕ
(ω)
ora
z M
=M
(ω
)
�ic
ho
ls p
lot
M (ϕ
(ω))
, d
B
Bla
ck p
lot
M(ϕ
(ω))
(car
tesi
anco
ord
inat
esy
stem
)

Mathematical models

FR
EQ
UEN
CY
RESP
ON
SE
Mat
hem
atic
al m
odels
u(
)(0
)j
tt
=u
eω
Lin
ear
syst
ems
are
des
crib
edb
y l
inea
rD
E
Let
us
inv
esti
gat
etr
ansf
orm
atio
ns
of
the
equat
ion
wh
enin
pu
tsi
gn
alis
a si
ne
wav
e.
Ou
tput
sign
alw
ill
be
sin
e w
ave
too
, bu
t an
gle
wil
l b
e sh
ifte
d.
()
y(
)(0
)(0
)j
tj
tj
t=
ye
ye
eω
ϕω
ϕ+
=
..
()
(1)
()
(1)
11
01
10
...
...
nn
mm
nm
my
ay
ay
ay
bu
bu
bu
bu
−−
−−
++
++
=+
++
+
Th
at’s
wh
yw
eca
nuse
dif
fere
nti
alop
erat
or
acti
ng
on D
E1
1
11
01
10
11
(0)
...
(0)
...
nn
mm
jj
tj
t
nm
mn
nm
m
dd
dd
dd
ye
ea
aa
ue
bb
bb
dt
dt
dt
dt
dt
dt
ϕω
ω−
−
−−
−−
++
++
=+
++
+
Usi
ng
Lap
lace
tra
nsf
orm
()
()
()
()
()
()
()
()
1
11
0
1
11
0
(0)
...
(0)
...
nn
jj
t
n
mm
jt
mm
ye
ej
aj
aj
a
ue
bj
bj
bj
b
ϕω
ω
ωω
ω
ωω
ω
−
−
−
−
++
++
=+
++
+

FR
EQ
UEN
CY
RESP
ON
SEM
athem
atic
al m
odels
We
obta
intr
ansf
er f
un
ctio
nG
()
()
()
()
()
()
()
()
()
1
11
0
1
11
0
...
(0)
(0)
(0)G
...
mm
mm
j
nn
n
bj
bj
bj
by
eu
uj
ja
ja
ja
ϕω
ωω
ωω
ωω
−
−
−
−
++
++
==
++
++
()
()
()
()
()
()
()
1
11
0
1
11
0
...
(0)
Gu
(0)
...
mm
mm
j
nn
n
bj
bj
bj
by
je
ja
ja
ja
ϕω
ωω
ωω
ωω
−
−−
−
++
++
==
++
++

()
()
()
()
()
()
()
1
11
0
1
11
0
...
G...
mm
mm
j
nn
n
bj
bj
bj
bj
Me
ja
ja
ja
ϕω
ωω
ωω
ωω
−
−−
−
++
++
==
++
++
FR
EQ
UEN
CY
RESP
ON
SEM
athem
atic
al m
odels
j G Im(s)
0ReG(s)
Fig
. O
ne
po
int
of
Fo
uri
er t
ran
sfer
fun
ctio
no
n G
auss
pla
ne
M ϕ

sz
jz
ω−
=−
FR
EQ
UEN
CY
RESP
ON
SEM
athem
atic
al m
odels
j G Im(s)
0ReG(s)
Fig
. O
ne
po
int
of
Fo
uri
er t
ran
sfer
fun
ctio
no
n G
auss
pla
ne
z –
zero
of
Fou
rier
tra
nsf
er f
un
ctio
n
Wh
at m
ean
s n
ota
tio
n
on
Gau
ss p
lan
e ?
z
jω
ϕ
j G Im(s)
0ReG(s)
z
jω ϕ
sz
jz
ω−
=−
sz
jz
ω+
=+
sz
jz
ω+
=+
[,
]zω
geo
met
rica
l

Fou
rier
tra
nsf
er f
un
ctio
n(
)(
)(
)s
j
Yj
Gs
Uj
ω
ω ω=
=
[]
0
()
()
()
stL
ft
Fs
ft
edt
∞−
==∫
Pie
rre-
Sim
on
de
Lap
lace
Jean
Bap
tist
eJo
sep
h F
ouri
er
0
()
()
jt
Fj
ft
edt
ωω
∞−
=∫
FR
EQ
UEN
CY
RESP
ON
SEM
athem
atic
al m
odels
()
()
()
()
()
()
()
1
11
0
1
11
0
...
G...
mm
mm
nn
n
bj
bj
bj
bj
ja
ja
ja
ωω
ωω
ωω
ω
−
−−
−
++
++
=+
++
+
()
1
11
0
1
11
0
...
G..
.
mm
mm
nn
n
bs
bs
bs
bs
sa
sa
sa
−−
−−
++
++
=+
++
+

FR
EQ
UEN
CY
RESP
ON
SEM
athem
atic
al m
odels
In c
ase
of
real
fun
ctio
ns
()
()
Gj
ϕω
ω=∠
()
u(
)(0
)cos
t=
ut
ω(
)y(
)(0
)cos
t=
yt
ωϕ
+
amp
litu
de
rati
ois
den
ote
das
()
()
Gu(
)
yj
jjω
ωω
=
Ph
ase-
shif
tis
den
ote
das

Gj
PjQ
()
()
()
ωω
ω=
+
22
()
()
()
MP
Qω
ωω
=+
φω
ω ω(
)(
)
()
=
arc
tgQ P
cos
sin
φφ
φ+
=j
ej
Gj
Me
j(
)(
)(
)ω
ωφ
ω=
MA A
=2 1
()
()
ω ω
In c
ase
of
po
lar
coo
rdin
ate
syst
em w
e ca
nuse
rela
tion
Itis
resu
ltof
Eu
ler
form
ula
and m
agn
itud
eM
def
init
ion
FR
EQ
UEN
CY
RESP
ON
SEM
athem
atic
al m
odels
–N
yquis
tplo
t
Po
int
on
pla
ne
has
two
coord
inat
esP
(ω)
and
Q(ω
)
P
Q
Pyth
agore
anth
eore
m (i
n a
rig
ht-
angle
d t
rian
gle
th
e ar
ea o
f th
e sq
uar
e
wh
ose
sid
e is
hyp
ote
use
cis
eq
ual
to
th
e su
m o
f th
e ar
eas
of
the
squ
ares
of
the
oth
er
two
sid
esa
and
b)
On
e po
int
of
a cu
rve
Gca
nb
e re
pre
sen
ted
by
com
ple
x n
um
ber

P
QP
=R
e G
(jω
)
Q=
Im G
(jω
)
FR
EQ
UEN
CY
RESP
ON
SEM
athem
atic
al m
odels
–Nyq
uis
t plo
t
Sym
bo
lsu
sed
to r
epre
sent
mag
nit
ud
e an
dp
has
ean
gle
()
()
()
()
()
arg
MG
j
Gj
Gj
ωω
ϕω
ωω
= =∠
=
Gj
Me
j(
)(
)(
)ω
ωφ
ω=
()
()
()
Gj
Gj
Gj
ωω
ω=
∠

FR
EQ
UEN
CY
RESP
ON
SEM
athem
atic
al m
odels
–Nyq
uis
t plo
t
P
QP
=R
e G
(jω
)
Q=
Im G
(jω
)
Sym
met
ry o
f a
Nyqu
ist
curv
e is
res
ult
of
com
ple
x n
um
ber
s pro
per
ties
()
()
Gj
Gj
ωω
−=

FR
EQ
UEN
CY
RESP
ON
SE
Exa
mple
1 –
Nyq
uis
t plo
tF
ind
a fr
equen
cyre
spo
nse
of
firs
tord
er D
E
dy
yu
dt+
=
Inpu
tsi
gn
alh
asfo
rm a
nd
an
gu
lar
freq
uen
cy
()
cos
ut
tω
=ω
=1
0 r
ad/s
, y(0
)=0
So
luti
on
Non
-ho
mo
gen
ous
DE
is
tran
sform
edb
y L
apla
ce t
ransf
orm
1(
)1
Gs
s=
+U
sing
giv
enan
gula
rfr
equ
ency
()(
)1
11
10
11
0(
)1
10
11
10
11
09
99
9
jG
sj
PjQ
jj
jj
ω−
==
==
+=
++
++
−−
We
obta
inm
agn
itu
de
and
ph
ase-
shif
t
22
()
()
()
0.1
0M
PQ
ωω
ω=
+=
(Ch
eck
ou
tth
ere
sult
inB
od
ep
lot)
()
()
1.4
784
()
oQ
arc
tgra
dP
ωφω
ω
=
=−
=−

Gs
k
Ts
()=
+1
Pk
T=
+2
21
ωQ
kT
T=
−
+ωω
22
1
Mk
T=
+2
21
ωφ
ω=
−a
rctg
T(
)
FR
EQ
UEN
CY
RESP
ON
SE
Exa
mple
2 –
Nyq
uis
tplo
tC
anw
e h
ave
a g
raph
ical
port
rayal
of
a fi
rst
ord
er D
E?
So
luti
on
)(
)(
1)
(1
ωω
ωω
jQP
jT
kj
G+
=+
=
Tra
nsf
er f
un
ctio
n
Fou
rier
tra
nsf
er f
un
ctio
n

FR
EQ
UEN
CY
RESP
ON
SE
Mat
hem
atic
al m
odels
–Bod
eplo
tB
od
e p
lot
are
ad
dit
ive
inca
seof
seri
esco
nnec
tion
.
()
11
2(
)...
()
()
()
()
12
1(
)(
)(
)..
.(
)(
)...
()
nn
jj
jj
nn
Gj
Me
Me
Me
MM
eφ
ωφ
ωφ
ωφ
ωφ
ωω
ωω
ωω
ω+
+=
=E
qu
ival
ent
tran
sfer
fun
ctio
nof
n f
un
ctio
ns
Lo
gar
ith
m o
f G
()
12
()
20
log
()
20
log
()
log
()
...
log
()
nL
MM
MM
ωω
ωω
ω=
=+
++
Matlab command
» bode([1], [1 1])
Matlab command
» bode([1], [1 2 1])
1(
)1
Gs
s=
+(
)()
1(
)1
1G
ss
s=
++
An
gle
s su
m
Lo
gar
ith
m o
f m
agn
itu
de
sum
-20
dB
90
o1
80
o
-40
dB

Bo
de
plo
t fo
r m
agn
itud
e
)(
log
20
)(
ωω
ML
=In
our
case
1lo
g20
log
20
)(
22
1+
−=
ωω
Tk
L
Bec
ause
12
21
11
01
20
log
120
log(
)1
for
TT
Tfo
rT
ωω
ωω
<<
+=
>>
1
11
20
log
1(
)2
0lo
g2
0lo
g(
)1
kfo
rT
Lk
Tfo
rT
ωω
ωω
<<
=
−>>
FR
EQ
UEN
CY
RESP
ON
SE
Exa
mple
2 -
conti
nued
Th
us

FR
EQ
UEN
CY
RESP
ON
SE
Exa
mple
2 -
conti
nued
ω=1/T
Break frequency
or
corner frequency
1 d
ecad
e1
dec
ade
1 d
ecad
e =
rang
e of
freq
uen
cies
fro
m
ω1
to ω
2, w
her
e
ω2=
10
ω1
Th
e sl
op
e of
a as
ym
pto
tic
lin
e
for
this
fir
st-o
rder
tra
nsf
er
fun
ctio
n i
s –
20
dB
/dec
ad
e.

FR
EQ
UEN
CY
RESP
ON
SE
Exa
mple
3F
ind
mag
nit
ude
M a
nd
ph
ase-
shif
tfo
r o
utp
ut
sig
nal
y(t
) if
DE
is
2
22
22
dy
dy
du
yu
dt
dt
dt
++
=+
And
in
pu
t si
gnal
is
()
2co
s3
ut
t=
y(0
)=1
, d
y(0
)/d
t=
2
So
luti
on
We
fin
dF
ouri
er t
ran
sfer
fu
nct
ion
22
22
32
()
22
22
96
2
sj
jG
ss
sj
j
ωω
ω+
++
==
=+
+−
++
−+
+A
nd
inv
esti
gat
epo
int
atknow
nan
gu
lar
freq
uen
cy
23
43
3(3
)7
68
5
jj
Gj
j
+−
==
−+
Mag
nit
ud
ean
dph
ase-
shif
tis
eq
ual
22
(3)
()
()
0.3
9M
PQ
ωω
=+
=33
(3)
83
4
oa
rctg
φ−
=
=−

Basic transfer functions
frequency responses

FR
EQ
UEN
CY
RESP
ON
SE B
ASI
C T
RA
NSF
ER
F.
Gai
n
Transfer
function
Transfer
function

FR
EQ
UEN
CY
RESP
ON
SE B
ASI
C T
RA
NSF
ER
F.
Inte
gral
jω=j Im(s)
0σ=Re(s)
s=σ+ jω
Pole
lo
cus
Fig
. N
yq
uis
t plo
tF
ig. P
ole
lo
ci o
f a
tran
sfer
fu
nct
ion
2
1(
)i
Gs
Ts
=S
erie
sco
nn
ecti
on
of
two
inte
gra
ltr
ansf
er f
un
ctio
ns
Do
ub
lep
ole
in
ori
gin
σ=
0(s
=0
)

FR
EQ
UEN
CY
RESP
ON
SE B
ASI
C T
RA
NSF
ER
F.
Gai
n a
nd inte
gral
Wh
ere
isp
ole
? T
he
audie
nce
isth
inkin
g...

FR
EQ
UEN
CY
RESP
ON
SE B
ASI
C T
RA
NSF
ER
F.
Real
inte
gral
()
()
1
kG
jT
jT
jω
ωω
=+
ReG(s)
Im G(s)
()
kG
jT
jω
ω=
()2
()
1
kG
jT
jT
jω
ωω
=+
()3
()
1
kG
jT
jT
jω
ωω
=+
()4
()
1
kG
jT
jT
jω
ωω
=+

FR
EQ
UEN
CY
RESP
ON
SE B
ASI
C T
RA
NSF
ER
F.
Gai
n,
inte
gral
, fi
rst
order
k
ReG(s)
Im G(s)
()
11
()
1
i
kj
TG
sj
Tω ω
+
=
+
1(
)1
i
Gs
kj
Tω
=+
()2
11
()
1
i
kj
TG
sj
Tω ω
+
=
+

FR
EQ
UEN
CY
RESP
ON
SE B
ASI
C T
RA
NSF
ER
F.
Dif
fere
nti
al T
F
jω=j ImG(s)
0σ=ReG(s)

FR
EQ
UEN
CY
RESP
ON
SE B
ASI
C T
RA
NSF
ER
F.
Gai
n a
nd d
iffe
renti
alT
F

FR
EQ
UEN
CY
RESP
ON
SE B
ASI
C T
RA
NSF
ER
F.
Dif
fere
nti
alre
alT
F
()
()
1
Tj
Gj
Tj
ωω
ω=
+(
)G
jT
jω
ω=
()2
()
1
Tj
Gj
Tj
ωω
ω=
+
()3
()
1
kG
jT
jT
jω
ωω
=+
()4
()
1
kG
jT
jT
jω
ωω
=+

FR
EQ
UEN
CY
RESP
ON
SE B
ASI
C T
RA
NSF
ER
F.
Gai
n a
nd d
iffe
renti
al r
eal
TF
kReG(s)
Im G(s)
1(
)1
dT
jG
sk
Tj
ω ω+
=+
()2
1(
)1
dT
jG
sk
Tj
ω ω
+=
+
()3
1(
)1
dT
jG
sk
Tj
ω ω
+=
+
Mo
vin
gd
iffe
renti
altr
ansf
er f
un
ctio
nk
un
its
we
get
Nyq
uis
t plo
t

FR
EQ
UEN
CY
RESP
ON
SE B
ASI
C T
RA
NSF
ER
F.
Dela
y
Gs
eT
s(
)=
−0
Eule
r fo
rmu
la e
xp
ansi
on
Sho
ws
that
geo
met
rica
lly
itis
circ
le
j Im G(s)
0ReG(s)
Fig
.N
yq
uis
t plo
t o
f th
e d
elay
1-1

FR
EQ
UEN
CY
RESP
ON
SE B
ASI
C T
RA
NSF
ER
F.
Dela
y an
d f
irst
ord
er
Arc
him
edes
cu
rve
00
()
11
Ts
Tj
kk
Gs
ee
Ts
Tj
ω
ω−
−=
=+
+
()
Gs
se
o
s=
+−
3
1()
Gs
se
o
s=
+−
2
1

SU
MM
AR
Y :
step
an
dfr
equ
ency
res
po
nse
s

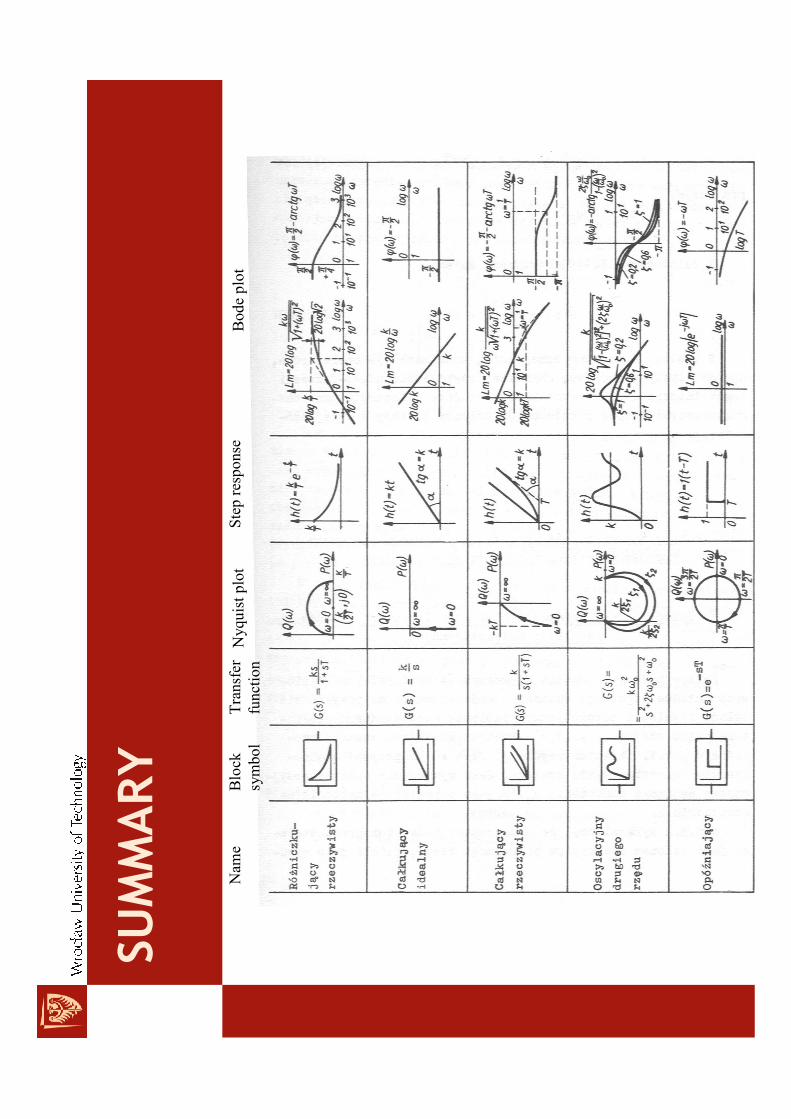
SUM
MA
RY
Nyq
uis
t p
lot
Bo
de
plo
tS
tep
res
po
nse
Tra
nsf
er
fun
ctio
n
Nam
eB
lock
sym
bo
l
SUM
MA
RY
Nyq
uis
t p
lot
Bo
de
plo
tS
tep
res
po
nse
Tra
nsf
er
fun
ctio
n
Nam
eB
lock
sym
bo
l

Fre
qu
ency
and
step
res
po
nse
rela
tio
n

FR
EQ
UEN
CY
AN
D S
TEP R
ESPO
NSE
RELA
TIO
NH
owto
obta
infr
equency
resp
onse
from
step r
esp
onse
?
Imp
uls
res
po
nse
g(t
) an
dst
ep r
esp
on
seh
(t)
()
()
dh
tg
td
t=
Init
ial
con
dit
ion
s ar
e ze
ro h
(0)=
0
00
()
()
()
jt
jt
dh
tG
jg
te
dt
ed
td
t
ωω
ω∞
∞−
−=
=∫
∫
11
1
1
21
22
21
1 1
0 0
...
kk
kk
kk
htg
t hh
tgt
t
hh
tgt
t
βα
βα
βα
− −
−=
=− −
==
− −=
=−
Ser
ies
coef
fici
ents
11
11
kk
kkt
tj
tn
nj
t
kk
kk
tt
ee
dt
jωω
ββ
ω−
−
−−
==
≈=
−∑
∑∫ (
)1
1
kk
nj
tj
tk
k
je
eω
ωβ ω
−−
−
=
=−
∑
We
are
app
rox
imat
ing
step
res
po
nse
by
#li
nes
()
()
()
()
()
()
11
11
sin
sin
cos
cos
nn
kk
kk
kk
kk
tt
jt
tβ
βω
ωω
ωω
ω−
−=
=
=−
+−
∑∑
(Usi
ng
Eu
ler
form
ula
)
()
()
PjQ
ωω
=+

FR
EQ
UEN
CY
AN
D S
TEP R
ESPO
NSE
RELA
TIO
NH
owto
obta
in m
athem
atic
al m
odelf
rom
fre
quency
resp
onse
?
Let
us
assu
me
that
we
hav
ed
ata
fro
mex
per
imen
t. D
ata
are
in B
od
e p
lot.
We
are
loo
kin
g f
or
a m
od
el
()
1
11
0
1
11
0
...
G..
.
mm
mm
nn
n
bs
bs
bs
bs
sa
sa
sa
−−
−−
++
++
=+
++
+
Co
effi
cien
tsa
, b
fix
ed. W
e ch
oo
seq
ual
ity c
rite
rio
ne.
g.
...a
nd
use
op
tim
izat
ion
met
ho
ds.
Matlab command
» bode([5 0.5], [0.01 0.2 0.1 0.2])
()
()
()
mo
del
u
1
,n
ii
ii
i
Qa
bG
jG
jω
ω=
=−
∑

No
n-m
inim
um
ph
ase
syst
ems

Def
. A
sys
tem
is c
all
eda
min
imu
mp
ha
sesy
stem
if a
ll i
ts p
ole
s a
nd
zer
os
are
in
th
e le
ft h
alf
pla
ne.
Min
imu
m p
has
e sy
stem
s ar
e ea
syto
con
tro
l.
Def
.S
yste
ms
tha
t a
ren
ot
min
imu
mp
ha
se a
re c
all
ed n
on
min
imu
m p
ha
se.
At
leas
t o
ne
zero
or
po
le l
ies
on
RH
P (
rig
ht-
han
d p
lan
e).
Th
e p
rop
erty
of
no
n-m
inim
um
ph
ase
imp
ose
s se
ver
e li
mit
atio
ns
tow
hat
can
be
ach
iev
edb
y
con
tro
l.
Wh
atca
nw
e sa
yab
ou
tst
ep r
esp
on
seo
fa
such
syst
em
? T
he
aud
ien
ceis
thin
kin
g...
NO
N-M
INIM
UM
PH
ASE
SY
STEM
S
()
0
G(
)s
sts
ht
ed
t
∞−
=∫
On
e ze
ro i
s o
n R
HP
, so
s =
s1
> 0
. T
hu
s fo
r s
= s
1 ()
1
1
G0
s
s=
Ste
p r
esp
on
seo
fsu
chsy
stem
co
nta
ins
po
siti
ve
and
neg
ativ
ev
alu
es.

NO
N-M
INIM
UM
PH
ASE
SY
STEM
SExa
mple
1 –
syst
em
ste
p r
esp
onse
jω=j Im G(s)
0σ=ReG(s)
Pole
lo
ci
Fig
.P
ole
and
zer
o o
f G
(s)
1-1
Fig
. P
roce
ssst
ep r
espo
nse
Fig
. S
imu
link
dia
gra
m
Zer
o l
oci
0 -1+1

NO
N-M
INIM
UM
PH
ASE
SY
STEM
SExa
mple
2 –
syst
em
ste
pre
spon
se
Fig
.P
roce
ssst
ep r
espo
nse
Fig
.S
imu
link
dia
gra
m
Ou
tput
sign
alte
nd
sat
the
beg
innin
gto
th
e o
ppo
site
sid
eth
anin
pu
tsi
gn
al. T
hat
’sw
hy
syst
em i
sm
ore
dif
ficu
ltto
contr
ol
than
min
imu
m-p
has
esy
stem
.
0
-0.2+1

NO
N-M
INIM
UM
PH
ASE
SY
STEM
SO
rigi
nof
a nam
eP
has
e-sh
ift
inn
on
-min
imu
m p
has
esy
stem
is
less
th
anin
min
imu
mp
has
esy
stem
.
Zer
os,
wh
ich
lie
on
op
po
site
sid
es o
f an
ax
is o
fsy
mm
etry
, d
oes
n’t
cau
se p
has
e-sh
ift.
An
dw
e h
ave
alte
rnat
ive
def
init
ion
of
no
n-m
inim
um
ph
ase
syst
em
G2,
wh
ich
has
zer
os
in R
HP
G1
has
sym
met
rica
l ze
ros
in L
HP
()
()
21
GG
ϕω
ϕω
>(
)(
)1
2G
Gj
jω
ω=
j Im G(s)
0ReG(s)
Po
le
1-1
Zer
o
Zer
o o
f
G1
Zer
o o
f
G2
Po
le f
or
bo
th
tran
fer
fun
ctio
ns
j Im G(s)
0ReG(s)
1-1
Po
le f
or
bo
th
tran
fer
fun
ctio
ns
ϕG
1
ϕG
2
Phas
e-s
hif
tϕ
G1
is
less
than 9
0°,
ϕG
2is
gre
ater
th
an 9
0°

Matlab command
» bode([1 1], [1 2])
Matlab command
» bode([1 -1], [1 2])
NO
N-M
INIM
UM
PH
ASE
SY
STEM
SO
rigi
n o
fa
nam
e
()
1
1G
2
ss
s
+=
+()
2
1G
2
ss
s
−=
+
()
()
21
GG
jj
ωω
=
()
()
21
GG
ϕω
ϕω
>

NO
N-M
INIM
UM
PH
ASE
SY
STEM
SO
rigi
n o
fa
nam
e
Fo
r m
inim
um
ph
ase
syst
em
s th
e p
has
e cu
rve
is g
iven
by
th
e g
ain
cu
rve
and
vic
ev
ersa
.A
n
app
rox
imat
e re
lati
on
is
()
()
log
2lo
g
dG
jG
jd
ωπ
ωω
∠≈
A s
lop
e o
fo
ne
for
the
gai
n c
urv
e co
rres
po
nd
sto
90
deg
. p
has
e.T
he
exac
t re
lati
on
s ar
e ca
lled
Bo
des
rel
atio
ns.
No
n-m
inim
um
ph
ase
syst
em
can
be
con
ver
ted
inm
inim
um
-ph
ase
syst
em
by
seri
esco
nn
ecti
on
wit
hsy
stem
des
crib
edb
y t
ran
sfer
fu
nct
ion
()
()(
)(
)(
)()
()
12
12
...
G..
.
n n
ss
ss
ss
ss
ss
ss
s
±±
±=
mm
m
()
Gj
kω
=
Mag
nit
ud
eo
fth
atsy
stem
is
con
stan
t an
d z
ero
s/p
ole
s ar
e sy
mm
etri
cal
on
LH
P a
nd
RH
P (
jω-
axis
)

NO
N-M
INIM
UM
PH
ASE
SY
STEM
S
No
n-m
inim
um
ph
ase
cau
ses
-ze
ro o
rp
ole
in
RH
P
-n
egat
ive
gai
n
-d
elay

OBIE
KT
Y N
IEM
INIM
ALN
OFA
ZOW
EPrz
ykła
d –
sam
olot
X-2
9
()
26
G6
ss
s−=
−

NO
N-M
INIM
UM
PH
ASE
SY
STEM
SA
irpla
ne

NO
N-M
INIM
UM
PH
ASE
SY
STEM
SExa
mple
–ai
rpla
ne
X-2
9T
he
tran
sfer
fun
ctio
n f
rom
ele
vo
nto
hei
gh
to
f an
air
pla
ne
wit
h e
lev
on
s in
th
e re
ar a
re a
lway
s n
on
-
min
imu
m p
has
e.T
he
Wri
gh
t b
roth
ers
avo
ided
th
isb
yan
ele
vo
n i
nfr
on
t. M
od
ern
fig
hte
r p
lan
es h
ave
can
ard
s in
th
efr
on
tan
d e
ven
jet
th
rust
ers
toav
oid
th
ep
rob
lem
. X
-29
is a
n e
xp
erim
enta
l ai
rcra
ft.
In o
ne
op
erat
ing
co
nd
itio
n t
he
syst
em
is
app
rox
imat
ely
des
crib
edb
yth
etr
ansf
erfu
nct
ion
()
26
G6
ss
s−=
−O
ne
po
lean
do
ne
zero
in t
he
rig
ht
hal
f p
lan
e.T
his
pla
ne
is d
iffi
cult
toco
ntr
ol
wel
l.

NO
N-M
INIM
UM
PH
ASE
SY
STEM
SExa
mple
–ai
rpla
ne
X-2
9
Fig
.B
od
e p
lot
of
X-2
9 a
irp
lan
eF
ig.N
yq
uis
t p
lot
of
X-2
9 a
irp
lan
e
()
()(
)2
22
626
26
15
62
0G
63
63
6
jj
jj
jj
ωω
ωω
ωω
ωω
ω+
−−
−−
−=
==
−−
−−
−
Ho
wto
mea
sure
freq
uen
cyre
spo
nse
of
a ai
rpla
ne?
Wh
yF
ou
rier
tra
nsf
er f
un
ctio
nis
for
cert
ain
co
nd
itio
ns?
Th
eau
die
nce
isth
ink
ing
...

NO
N-M
INIM
UM
PH
ASE
SY
STEM
SExa
mple
–busi
ness
jet
resp
onse
Nyq
uis
t p
lot
Bo
de
plo
tS
tep
res
po
nse
Tra
nsf
er
fun
ctio
n
Nam
eB
lock
sym
bo
l

NO
N-M
INIM
UM
PH
ASE
SY
STEM
SExa
mple
–busi
ness
jet
resp
onse

NO
N-M
INIM
UM
PH
ASE
SY
STEM
SH
elico
pte
r
Lo
ok
bac
kin
pre
vio
us
lect
ure
.

NO
N-M
INIM
ALP
HA
SE S
YST
EM
SExa
mple
–w
ater
leve
lin
dru
m
Lev
el d
yn
amic
s in
bo
iler
s is
no
n-m
inim
um
ph
ase
bec
ause
of
the
shri
nk
an
d s
wel
l
ph
eno
men
a.T
he
tran
sfer
fun
ctio
n f
rom
tub
e op
enin
gto
pow
er i
sfo
r a
hy
dro
ele
ctri
c
po
wer
syst
em.
()
0 0
()
12
G(
)1
PP
ssT
sA
sA
sT
−=
=+

NO
N-M
INIM
ALP
HA
SE S
YST
EM
SExa
mple
–Bic
ycle
con
trol
θ θθθα ααα
β βββx
y
ab
v
y
z
Fig
No
tati
on
, U
pv
iew
Fig
.N
ota
tio
n,
fro
nt
vie
w
()
0
0
2
()
G(
)
vs
am
lvs
as
mg
ls
bJ
sJ
θ β
+=
=−
m –
mas
s(b
icycl
e+cycl
ist=
syst
em
)
a –
dis
tance
rear
wh
eel
–ce
nte
ro
fgra
vit
y
b -
dis
tan
ce f
ront
wh
eel
–ce
nte
r o
f gra
vit
y
l –
dis
tance
bet
ween
OX
axis
and
cen
ter
of
gra
vit
y
J –
syst
em
iner
tia
ver
sus
OX
axis
v0-
init
ial
vel
oci
ty
Frontwheel steering

NO
N-M
INIM
ALP
HA
SE S
YST
EM
SExa
mple
–Bic
ycle
con
trol
Typ
ical
par
am
eter
sfo
r b
ike
m=
80
kg
a= 0
.3 m
l= 1
.2 m
b=
0.7
J=1
20
kg
m3
v0=
5 m
/s
()
2
()
16
.6G
1.7
()
7.8
ss
ss
s
θ β+
==
−
Frontwheel steering is non-m
inimumphase because of the right half planepole

NO
N-M
INIM
ALP
HA
SE S
YST
EM
SExa
mple
–Bic
ycle
con
trol
Bic
ycl
e co
ntr
ol
isn
’tea
sy..
.

Frequencyplots
ofelectricalsystems

FR
EQ
UEN
CY
PLO
TS
Meas
ure
ments
–os
cillos
cope
Devicefor observingofelectricalsygnalas a function of a tim
e

CH
AR
AK
TER
YST
YK
I C
ZĘST
OT
LIW
OŚC
IOW
EPom
iary
-os
cylo
skop
Yel
low
colo
r–
yel
low
plo
t
Blu
eco
lor
–b
lue
plo
t
Au
to-s
cale
Ch
ann
el 1
, ca
nse
rve
e.g.
fo
r
ob
serv
ing o
fin
pu
tsi
gn
alto
a
syst
em
Ver
tica
l p
osi
tio
n o
fa
yel
low
plo
t
Sca
leo
fa
yel
low
plo
t, y
-co
ord
ian
te(o
ro
rdin
ate)
Mat
hem
atic
al o
per
atio
ns
on
in
pu
t si
gn
als
e.g
. su
m
Ch
ann
el1
,ca
n s
erv
ee.
g.
fo
r
ob
serv
ing o
f o
utp
ut
sign
alfr
om
a
syst
em
Ver
tica
lp
osi
tio
no
fa
blu
ep
lot
Ex
tern
altr
igg
erfo
r
sign
al l
og
gin
g
Ch
ann
el
men
u

FR
EQ
UEN
CY
PLO
TS
Meas
ure
ments
–sp
ect
rum
anal
yzer
Cat
ho
d r
ay o
scil
losc
op
e
All
ow
s si
gn
al
vo
ltag
esto
be
vie
wed
as t
wo
-dim
ensi
on
al
gra
ph
plo
tted
as
a
fun
ctio
n o
f ti
me
3rd
ord
er s
yst
em
Sp
ectr
um
an
alyzer

Rea
l p
art
mea
sure
men
tIm
agin
ary p
art
mea
sure
men
t
Fre
qu
ency
of
anin
pu
tsi
gn
al,
Hz
Sh
ape
of
a w
ave
Inp
ut
sign
alO
utp
ut
sign
al
Inp
ut
sign
alto
pro
cess
Fre
qu
ency
scal
e1
0 k
Hz,
10
00
Hz,
10
0 H
z, 1
0 H
z
Sta
teb
ias
of
anam
pli
tud
e
Osc
illa
tio
n d
amp
ing
+
-gro
un
d
Ou
tpu
tsi
gn
alfr
om
a p
roce
ss
ente
rs
Sca
le
Po
wer
On
Am
pli
tud
e
En
ter
the
sign
al
Osc
illo
sco
pe
wo
rk c
on
dit
ion
s
1 c
han
nel
, 2
ch
ann
els,
su
m
Tim
e sc
ale
Ver
tica
l sh
ift
Ho
rizo
nta
l sh
ift
Imag
eq
ual
ity
Sh
arp
Bri
gh
t et
c.
Tri
gg
ersi
gn
al
Cu
rren
t fr
equ
ency

Real frequency responsesfor
therm
al systems

Mil
l
CH
P p
lant
80
0 M
W, S
chw
arz
e P
um
pe
Mo
tor
Venti
lato
r
Flu
e g
ases
Air
and
co
al p
ulv
er
FR
EQ
UEN
CY
PLO
TS
Therm
al s
yste
ms
Rafa
ko
burn
ers
Kanał
recyrk
ula
cji
spal
in
Mai
n b
urn
ers
Ad
dit
ional
bu
rner
s

FR
EQ
UEN
CY
PLO
TS
Obie
kty
ciepln
eE
xam
ple
. In
flu
ence
of
fuel
on
fre
shst
eam
An
gu
lar
vel
oci
tyo
fv
enti
lato
ris
chan
ged
.

Real frequency responsesfor
mechanical systems

FR
EQ
UEN
CY
PLO
TS
Exa
mple
–ca
rIn
pu
t–
stee
rin
g w
hee
l
Ou
tpu
t –
dir
ecti
on
T
hro
ttle
Lo
ok
ou
t o
n t
raff
ic r
egu
lati
on
s. N
ext
tim
e th
e p
oli
ce w
ill
sto
p y
ou
, ju
st s
ay t
hat
yo
u a
re d
raw
ing
Bo
de
plo
t...

FR
EQ
UEN
CY
PLO
TS
Exa
mple
–ca
r

FR
EQ
UEN
CY
PLO
TS
Exa
mple
–ca
r

Thank you for
your attention