facolta di ingegneria` corso di laurea in...
TRANSCRIPT
UNIVERSITA DEGLI STUDI DI ROMA
TOR VERGATA
FACOLTA DI INGEGNERIA
CORSO DI LAUREA IN INGEGNERIA
DELL’AUTOMAZIONE
A.A. 2006/2007
Tesi di Laurea
CONTROLLO NON LINEARE DELL’ATTUATORE F DEL
FRASCATI TOKAMAK UPGRADE
RELATORE CANDIDATO
Luca Zaccarian Francesco Mecocci
CORRELATORI
Vincenzo VitaleLuigi Pangione

Ai miei nonni Alba, Galliano, Ernesta e RiccardoAlla mia famiglia Paola, Franco e Andrea
Alla mia fidanzata Giulia

Indice
Ringraziamenti 1
Introduzione 2
1 Fusione termonucleare e FTU 5
1.1 La fusione termonucleare . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Tokamak . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3 Frascati Tokamak Upgrade . . . . . . . . . . . . . . . . . . . . . . . . 13
1.3.1 Sistema di controllo di FTU . . . . . . . . . . . . . . . . . . . 16
2 Instabilita e modello del sistema di controllo della posizione orizzon-
tale del plasma di FTU 21
2.1 Analisi degli esperimenti reali e dell’instabilita . . . . . . . . . . . . . 21
2.2 Modello dell’anello di controllo della posizione orizzontale . . . . . . . 26
2.2.1 Miglioramento del modello simulativo . . . . . . . . . . . . . . 29
2.2.2 Funzionamento ideale dell’anello di controllo . . . . . . . . . . 32
2.2.3 Analisi di stabilita dell’anello di controllo lineare . . . . . . . . 33
3 Soluzione per la stabilizzazione della posizione orizzontale del plasma
di FTU 36
3.1 Compensazione anti-windup . . . . . . . . . . . . . . . . . . . . . . . 37
INDICE I

INDICE
3.2 Applicazione della compensazione anti-windup al sistema di controllo
di FTU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2.1 Progetto di un compensatore anti-windup di base . . . . . . . 40
3.2.2 Progetto di un compensatore anti-windup generale . . . . . . 47
3.3 Disattivazione del compensatore anti-windup nel regime di stabilita . 48
4 Implementazione della soluzione progettata 56
4.1 Discretizzazione del compensatore anti-windup . . . . . . . . . . . . . 57
4.2 Implemementazione in linguaggio C del compensatore anti-windup. . 60
4.3 Integrazione del compensatore nel sistema di controllo . . . . . . . . . 63
5 Risultati simulativi 66
5.1 Risultati simulativi su uno sparo instabile . . . . . . . . . . . . . . . 66
5.2 Risultati simulativi su uno sparo stabile . . . . . . . . . . . . . . . . . 72
6 Conclusioni e sviluppi futuri 77
6.1 Conclusioni sui risultati ottenuti . . . . . . . . . . . . . . . . . . . . . 77
6.2 Sviluppi ulteriori della legge di controllo . . . . . . . . . . . . . . . . 79
Appendice - Codice sorgente C sviluppato 81
Bibliografia 88
INDICE II

Ringraziamenti
Ringrazio la mia famiglia, Franco, Paola, Andrea per avermi permesso di intrapren-
dere e sostenere gli studi universitari e per avermi sempre sostenuto durante essi e
durante questa Tesi.
Ringrazio il Professor Luca Zaccarian per avermi dato l’opportunita di svolgere questa
Tesi, e per avermi costantemente guidato durante il suo svolgimento.
Ringrazio tutti i componenti del gruppo CODAS di FTU, Franco, Maurizio, Luca,
Canzio, e in particolare Luigi ed Enzo per avermi accolto nel Centro Ricerche Frascati
dell’ENEA e seguito da vicino durante il lavoro di Tesi.
Ringrazio i compagni laureandi Liberato, Luca, Gianluca per l’aiuto sempre pronto e
la compagnia immancabile.
Ringrazio tutti i compagni del corso di studi per il sostegno e l’accompagnamento
durante durante gli studi nell’Ateneo.
Ringrazio la mia fidanzata Giulia che con il suo amore mi ha sempre accompagnato e
con me ha condiviso ogni momento di questo lavoro.
Introduzione 1
Introduzione
La Tesi si inserisce nel contesto della ricerca scientifica sulla fusione termonucleare
controllata. La ricerca scientifica in questo campo e impegnata nel dimostrare la rea-
lizzabilita di un reattore a fusione termonucleare. Un reattore a fusione termonucleare
e, nei progetti dei ricercatori, una centrale elettrica che viene alimentata dalla stessa
fonte di energia che alimenta il Sole e tutte le altre stelle.
Piu in particolare la Tesi si inserisce all’interno della collaborazione di ricerca,
iniziata nel 2002 con il lavoro [2], tra l’Universita degli studi di Roma Tor Vergata
(UNITV) e l’Ente per le Nuove tecnologie, l’Energia e l’Ambiente (ENEA) riguardan-
te l’esperimento Frascati Tokamak Upgrade (FTU) che si trova al Centro Ricerche
ENEA di Frascati. I protagonisti di questa collaborazione sono il Prof. Zaccarian
del Dipartimento di Ingegneria Informatica Sistemi e Produzione di UNITV relatore
della Tesi, il gruppo Sistema di Controllo e Acquisizione Dati (CODAS) di FTU di cui
fanno parte l’Ing. Vincenzo Vitale e l’Ing. Luigi Pangione correlatori della presente
Tesi, ed i Tesisti di UNITV che sviluppano, nelle loro Tesi, i temi di interesse comune
ai due gruppi e si succedono nel lavoro di ricerca.
Il tema affrontato nella presente Tesi e lo studio dei fenomeni di instabilita presenti
nel sistema di controllo di FTU e lo studio di una soluzione a questi fenomeni. Essa
e il proseguimento del lavoro di tre precedenti Tesi ([3], [4], [5]) che si sono occupate
di modellizzare il sistema di controllo della posizione orizzontale del plasma di FTU.
Introduzione 2

Introduzione
Partendo dal modello simulativo del sistema di controllo e dalla convinzione che la
causa dei fenomeni di instabilita fosse da attribuire alla non linearita di uno degli at-
tuatori responsabili del controllo della posizione orizzontale del plasma, nella presente
Tesi si e studiato una soluzione per compensare la non linearita presente nel sistema
e riprodotta dal modello. I risultati di questo studio hanno avuto riscontro a livello
simulativo sullo stesso modello del sistema di controllo ereditato dalle precedenti Tesi.
Il sistema di compensazione della non linearita e stato quindi tradotto in linguaggio
C, pronto per un futuro ed eventuale inserimento nel codice del sistema di controllo
dell’esperimento reale.
Il lavoro e stato svolto presso il Centro Ricerche dell’ENEA a Frascati sotto stret-
ta collaborazione con tutti i membri di FTU CODAS, ed in particolare con l’Ing.
Vincenzo Vitale e l’Ing. Luigi Pangione e sotto la guida del Prof. Luca Zaccarian.
Nel Capitolo 1 della Tesi vengono discussi i principi fisici della fusione termonu-
cleare. Viene fornita una definizione di plasma termonucleare, vengono illustrate le
reazioni termonucleari di fusione di interesse sperimentale ed evidenziate le condizioni
necessarie al loro innesco. Nello stesso Capitolo vengono discussi i principi fisici di
funzionamento del confinamento magnetico del plasma termonucleare negli impianti
sperimentali Tokamak, e concentrata l’attenzione sul particolare impianto FTU. Di
quest’ultimo viene analizzato il sistema di controllo della posizione del plasma.
Nel Capitolo 2 viene esposto il motivo reale che ha motivato lo sviluppo della Tesi,
ovvero l’instabilita dalla quale e afflitto l’anello di controllo della posizione orizzontale
del plasma di FTU, analizzando i segnali sperimentali ottenuti dall’archivio ENEA.
La causa dell’instabilita viene individuata nella non linearita del convertitore AL-F,
uno degli attuatori dell’anello di controllo. Viene quindi mostrato il modello simu-
lativo dell’anello di controllo suddetto dal quale prende le mosse questa Tesi per la
Introduzione 3
Introduzione
progettazione di una soluzione all’instabilita. Il modello simulativo e stato migliorato
nella presente Tesi e e basandosi sui risultati ottenuti e stato progettata l’estensione
della legge di controllo di FTU descritta nel Capitolo successivo.
Il Capitolo 3 tratta il tema centrale della Tesi: la progettazione di un compensa-
tore, basato sullo schema di compensazione anti-windup, per correggere e stabilizzare
la dinamica del sistema di controllo di FTU qualora l’attuatore AL-F faccia ingresso
nel regime di instabilita. La soluzione definitiva proposta nel Capitolo 3 estende lo
schema standard del compensatore anti-windup grazie all’inserimento nello stesso del
modello simulativo del convertitore AL-F e di un blocco funzionale aggiuntivo per la
disattivazione dell’azione del compensatore nel regime di stabilita. Le due estensioni
sono motivate rispettivamente dalla mancata disponibilita in tempo reale del segnale
di uscita di AL-F e dalle differenze tra lo scenario standard in cui e stata sviluppata la
tecnica di compensazione anti-windup e quello reale del sistema di controllo di FTU.
Il Capitolo 4 tratta la discretizzazione e l’implementazione in linguaggio C del com-
pensatore progettato nel precedente Capitolo. Alla descrizione di queste operazioni
segue l’esposizione delle modifiche da attuare al codice C con il quale e implementata
l’attuale legge di controllo di FTU al fine di estenderla con il compensatore proposto
in questa Tesi.
Il Capitolo 5 e completamente dedicato all’esposizione dei risultati simulativi ot-
tenuti con l’applicazione delle soluzioni di compensazione progettate ed esposte nei
Capitoli 3 e 4.
Nel Capitolo 6 vengono tratte le conclusioni dell’attivita svolta nella Tesi e an-
ticipati i futuri sviluppi che seguiranno e si appoggerrano ai risultati qui ottenuti
nel contesto dell’impianto sperimentale FTU e piu in generale nello scenario della
sperimentazione della fusione termonucleare controllata sugli impianti Tokamak.
Introduzione 4

Capitolo 1
Fusione termonucleare e FTU
Vengono in questo capitolo discussi i principi fisici della fusionetermonucleare e di funzionamento degli impianti Tokamak. Vienepoi focalizzata l’attenzione sul l’impianto FTU, e sul suo sistemadi controllo. Questo capitolo, benche di natura introduttiva, e ilfrutto di attenti studi e ricerche su documentazioni quali [6] e [7] edi un confronto diretto con il personale responsabile dell’impiantosperimentale FTU.
1.1 La fusione termonucleare
La fonte di energia primaria che alimenta il nostro pianeta e il Sole. Il Sole, come
le altre stelle, e un enorme ammasso di gas, principalmente composto da idrogeno
H 73% ed elio He 25%. L’enorme quantita di materia (1.989 · 1030 kg) non collassa
gravitazionalmente su se stessa grazie all’innescarsi di una reazione esoenergetica: la
fusione termonucleare. I gas che compongono il Sole sono caratterizzati da elevate
densita e temperature. In queste condizioni gli elettroni che orbitano attorno ai nu-
clei hanno energia sufficiente per allontanarsi dalla loro orbita. Ioni positivi (nuclei
atomici formati da protoni e neutroni, privati degli elettroni) ed elettroni liberi non
piu associati in atomi formano un gas complessivamente elettricamente neutro, detto
plasma termonucleare, considerato il quarto stato della materia.
5

Cap. 1 Fusione termonucleare e FTU 1.1 La fusione termonucleare
La fusione nucleare e un processo che ha come reagenti i nuclei di atomi con un dato
numero atomico, e come prodotti energia e nuclei di atomi con un numero atomico
maggiore. Nel Sole e nelle altre stelle avvengono una varieta di reazioni termonucleari.
L’interesse per quanto riguarda la realizzazione di fusione termonucleare controllata
sulla Terra, al fine di sfruttare l’energia prodotta, ricade su una serie di reazioni che
hanno brevi tempi di innesco e basse energie di soglia. Le reazioni oggetto di studio
sono1:
D + D → 3He + n + 3.268 MeV
D + D → T + H + 4.032 MeV
D + T → 4He + n + 17.571 MeV
In ognuna di queste reazioni la massa complessiva dei prodotti e in difetto rispetto
alla massa dei reagenti. Tale difetto di massa si trasforma in energia per il principio
di conservazione della massa e dell’energia e per il principio di equivalenza tra le
stesse. L’energia generata si manifesta sotto forma di energia cinetica delle particelle
prodotte.
Le condizioni necessarie alla creazione del plasma e l’innesco della reazione di
fusione sono:
• Elevata densita del plasma
• Elevata temperatura del plasma
• Lungo tempo di confinamento del plasma
1D indica il deuterio 2H, isotopo dell’idrogeno 1
H, il cui nucleo e composto da un protone e unneutrone; T indica il trizio 3
H, altro isotopo dell’idrogeno, il cui nucleo e composto da un protone edue neutroni; n indica il neutrone; in ogni reazione gli l’atomi sono sprovvisti degli elettroni.
6

Cap. 1 Fusione termonucleare e FTU 1.1 La fusione termonucleare
Affinche due nuclei fondano, essi devono trovarsi a distanze equivalenti a quelle
del nucleo (10−15 m), di modo che l’interazione nucleare forte predomini sulla repul-
sione elettromagnetica Coulombiana. Questa condizione viene assicurata nelle stelle
dall’alta densita e temperatura del loro plasma. Essendo impossibile riprodurre sulla
Terra le condizioni di densita delle stelle, la temperatura necessaria per l’innesco della
reazione dovra essere superiore a quella delle stelle2. Un altro ostacolo tecnico e la
necessita di confinare in maniera stabile e sicura il plasma. Il metodo di confinamento
del plasma che ad oggi ha avuto piu successo e il confinamento magnetico. Essendo il
plasma la miscela di due gas ionizzati, ioni elettricamente positivi ed elettroni elettri-
camente negativi, esso e sensibile all’influsso di campi magnetici esterni. L’impianto
a confinamento magnetico che ad oggi ha avuto il maggior successo e il Tokamak. Lo
studio centrale di questa tesi si occupa di proporre una soluzione per ottimizzare il
metodo di confinamento magnetico del plasma della macchina Tokamak FTU.
L’obiettivo principale della ricerca scientifica, in questo settore, e quello di di-
mostrare la realizzabilita di un reattore a fusione termonucleare controllata. Nelle
previsioni dei ricercatori il reattore, probabilmente progettato sulla base del modello
Tokamak, verra alimentato con D e T, sara capace di creare e confinare a lungo il
plasma, di modo da poter innescare la reazione di fusione, dalla quale ottenere energia.
Negli esperimenti attuali e stato dimostrato come esista attivita di fusione all’in-
terno del plasma termonucleare generato. La prova consiste nei neutroni, prodotti
dalle reazioni di fusione, che sfuggono ai campi magnetici di confinamento e vengono
rilevati da apparecchiature esterne. Tuttavia negli esperimenti attuali la reazione in-
nescatasi non puo essere mantenuta a lungo, proprio per problemi legati al controllo
2Densita di particelle elementari: 1032m
−3 nel nucleo del Sole, 1020m
−3 nei plasmi termonuclearisperimentali, 1025
m−3 gas a temperatura ambiente e pressione 1 atm; temperature: 106
K coronasolare, 107
K nucleo solare, 108K plasma termonucleare sperimentale.
7

Cap. 1 Fusione termonucleare e FTU 1.2 Tokamak
del plasma. Nel futuro reattore le reazioni di fusione dovranno raggiungere il cosı
detto stadio di ignizione ossia di autosostentamento. Per far questo sara necessario
acquisire la capacita di confinare il plasma per tempi molto lunghi.
Figura 1.1: La geometria toroidale.
1.2 Tokamak
Tokamak e l’acronimo del nome russo Toroidal’naya Kamera v Magnitnykh Katush-
kakh che sta per camera toroidale a bobine magnetiche. E un impianto costituito
da una camera toroidale all’interno della quale viene creato e confinato il plasma per
mezzo di campi magnetici. La geometria toroidale viene illustrata in figura 1.1:
I campi magnetici responsabili della creazione del plasma e del suo confinamento
sono generati da avvolgimenti elettrici disposti all’esterno della camera. Lo stesso
plasma essendo ionizzato e contenuto all’interno di una camera toroidale, costituisce
un circuito elettrico a spira. Nella seguente tabella sono riportati i circuiti elettrici
presenti in un impianto Tokamak, le correnti che vi circolano e il campo magnetico
che ognuna di esse genera. Gli stessi vengono illustrati nella figura 1.2.
Prima dell’esperimento viene creato il vuoto all’interno della camera, ripulendola
il piu possibile dalle impurita e dai residui degli esperimenti precedenti. Poi all’inizio
dell’esperimento viene immesso all’interno della camera una miscela di gas preioniz-
8

Cap. 1 Fusione termonucleare e FTU 1.2 Tokamak
Figura 1.2: A sinistra gli avvolgimenti elettrici del Tokamak con le correnti che liattraversano piu il plasma. A destra i campi magnetici prodotti dalle relative correnti.
Corrente Campo
Alimentazione campo toroidale Itor~Bt
Alimentazione campo poloidale (Trasformatore) IT~Bind
Spira di plasma IP~Bp
Alimentazioni campi poloidali per la posizione del plasma IV , IH~Bv , ~Bh
Tabella 1.1: Avvolgimenti elettrici, correnti elettriche e campi magnetici del Tokamak.
zata (D e T, oppure unicamente D) in modo da poter reagire all’influsso dei campi
magnetici esterni.
Il campo magnetico toroidale ~Bt e responsabile dell’azione principale di confina-
mento. Lungo l’alimentazione dello stesso viene fatta scorrere una corrente costante
nel tempo che genera il campo magnetico ~Bt interno alla camera, costante nel tempo
in direzione torodiale (vedi figura 1.2). Il campo ~Bt e il campo magnetico piu intenso
tra quelli che agiscono sull’impianto. La sua intensita e dell’ordine dell’unita di T (il
campo magnetico terrestre e dell’ordine dei 10−5 T) 3. Esso vincola gli atomi ionizzati
all’interno della camera a muoversi solo in direzione toroidale, deflettendo, grazie alla
3T sta per Tesla, unita di misura dell’intensita di campo magnetico.
9

Cap. 1 Fusione termonucleare e FTU 1.2 Tokamak
Figura 1.3: Confinamento del plasma mediante il campo magnetico toroidale ~Bt. Laparticella carica H segue una traiettoria elicoidale attorno alle linee di campo di ~Bt.
forza di Lorentz, ~FL = q · ~v × ~Bt, le componenti delle velocita delle particelle paralle-
le al piano poloidale, che altrimenti provocherebbero una deriva delle stesse verso le
pareti della camera.
Il raggio di curvatura di una particella di massa m e carica q attorno alla linea di
campo di ~Bt, detto raggio di Larmor,
rL =m · v
q ·Bt
e inversamente proporzionale all’intensita del campo ~Bt ed e per questo che il campo
viene mantenuto ad alti regimi.
Il trasformatore centrale e responsabile della creazione della corrente di plasma
IP . Parte del riscaldamento necessario a trasformare il gas in plasma viene ottenuto
per effetto Joule, inducendo nella camera la corrente elettrica IP4. La corrente viene
indotta dall’avvolgimento centrale che costituisce il primario di un trasformatore, di
4I Tokamak prevedono inoltre sistemi di surriscaldamento addizionali per far raggiungere al pla-sma temperature di fusione. Gli impianti di surriscaldamento addizionali possono essere impianti ainiezione di onde elettromagnetiche (come quelli presenti in FTU), oppure ad immissione di particelleneutre con alta energia cinetica.
10

Cap. 1 Fusione termonucleare e FTU 1.2 Tokamak
Figura 1.4: Risultante della somma dei campi magnetici toroidale ~Bt e poloidale ~Bp.Il campo magnetico risultante ha linee di campo elicoidali.
cui il gas ionizzato (e, una volta creatosi, il plasma) fa da secondario. Attraverso
l’avvolgimento del trasformatore centrale viene fatta scorrere una corrente IT che
cresce costantemente nel tempo. La corrente IT genera un campo magnetico variabile
~Bind (vedi figura 1.2) le cui linee di campo, parallele e concentriche ai piani poloidali,
avvolgono la camera. Secondo la legge dell’induzione elettromagnetica di Faraday-
Neumann-Lenz,
−∆Φind
∆t= f.e.m. = R · IP
la variazione costante del flusso magnetico del campo ~Bind, generato dal trasformatore
centrale e concatenato con il secondario, induce una forza elettromotrice, e quindi una
corrente IP costante, nello stesso secondario. Avendo il gas ionizzato una resistenza
R non nulla, viene dissipata potenza termica pari a R · I2P che surriscalda il gas. Il
plasma e anch’esso conduttore elettrico e, una volta creatosi, continua a rispondere
all’azione di confinamento del campo ~Bt e di induzione del campo ~Bind. Inoltre IP
costante nel tempo genera a sua volta un campo magnetico costante nel tempo, detto
campo magnetico poloidale ~Bp, le cui linee di campo sono concentriche alla spira di
11

Cap. 1 Fusione termonucleare e FTU 1.2 Tokamak
Figura 1.5: Azione di contenimento del campo ~Bv sulla posizione orizzontale delplasma.
plasma e al piano poloidale (vedi figura 1.2). La risultante tra i campi ~Bp e ~Bt e un
campo elicoidale illustrato in figura 1.4.
Oltre all’azione del campo magnetico di confinamento toroidale, per mantenere in
equilibrio il plasma in una precisa posizione nella camera, c’e la necessita di usare
campi magnetici ulteriori ~Bt e ~Bv. Il tema centrale della tesi verte sul mantenimento
dell’equilibrio orizzontale del plasma per mezzo del campo magnetico verticale ~Bv
nell’esperimento FTU.
Responsabili del posizionamento del plasma all’interno della camera sono i campi
poloidali verticale ~Bv ed orizzontale ~Bh. Lungo l’avvolgimento che alimenta ~Bv viene
fatta scorrere una corrente costante la quale genera il campo magnetico costante nel
tempo ~Bv. Le linee di campo di ~Bv sono parallele al piano poloidale e, all’interno di
esso, hanno direzione verticale. Il plasma subisce, a causa di ~Bv, una forza di Lorentz
in direzione orizzontale (vedi figura 1.5).
Per l’avvolgimento H vale l’opposto. Esso genera ~Bh orizzontale il quale agisce
con una forza in direzione verticale sul plasma.
12

Cap. 1 Fusione termonucleare e FTU 1.3 Frascati Tokamak Upgrade
1.3 Frascati Tokamak Upgrade
Presso Frascati risiede l’impianto sperimentale Frascati Tokamak Upgrade. FTU, e
un tokamak compatto ad alto campo che mira a produrre plasmi aventi alta densita,
alta temperatura e lunghi tempi di confinamento dell’energia per studiare regimi di
interesse reattoristico [6]. Vengono riportate delle immagini dell’impianto in figura
1.6. Nella tabella 1.2 vengono riportate le principali caratteristiche di FTU.
Parametro FTU ValoreR, Raggio maggiore 0.935 mr, Raggio minore 0.31 mIP , Massima corrente di plasma 1.6 MABt, Intensita campo magnetico toroidale 8 TDurata flat-top campo toroidale 1.5 sEnergia assorbita dal campo toroidale 160 MJEnergia assorbita dal campo poloidale 200 MJ
Tabella 1.2: Caratteristiche principali di FTU.
Figura 1.6: Foto dell’impianto FTU. A sinistra la camera da vuoto interna primache venisse circondata dagli avvolgimenti elettrici. A destra l’impianto dall’esterno,le apparecchiature esterne visibili sono i sistemi di surriscaldamento addizionale adonde elettromagnetiche.
13

Cap. 1 Fusione termonucleare e FTU 1.3 Frascati Tokamak Upgrade
Figura 1.7: Avvolgimenti elettrici dell’impianto FTU. A sinistra gli avvolgimenti T,V, F, H che generano i campi poloidali. A destra in giallo evidenziato un elementodell’alimentazione del campo toroidale.
Le elevate potenze assorbite in tempi brevi dall’impianto FTU necessitano di un’a-
limentazione autonoma rispetto alla rete Enel. L’intenso campo toroidale di FTU vie-
ne alimentato dal generatore MFG1 (Motor Flywheel Generator). MFG1 e un gruppo
motore-volano-generatore. Il motore alimentato dalla rete Enel, mette in moto prima
dell’esperimento un pesante volano che accumula energia meccanica, la quale viene
assorbita dal generatore durante l’esperimento per generare corrente alternata. La
corrente alternata viene convertita in continua da dei ponti raddrizzatori a diodi per
poi essere utilizzata per alimentare il campo toroidale.
Un secondo generatore, MFG3, e dedicato all’alimentazione dei campi poloidali.
L’energia elettrica generata da MFG3 viene poi convertita da alternata in continua
dagli impianti di conversione a tiristori AL-T, AL-V, AL-F.
• AL-T alimenta il trasformatore centrale o avvolgimento T (Transformer) con la
corrente IT , che induce la corrente di plasma.
14

Cap. 1 Fusione termonucleare e FTU 1.3 Frascati Tokamak Upgrade
Figura 1.8: Schema generale del sistema di controllo di FTU
• AL-V alimenta l’avvolgimento V (Vertical) con la corrente IV , che genera il cam-
po magnetico poloidale verticale ~Bv, responsabile dell’equilibrio della posizione
orizzontale del plasma.
• AL-F alimenta l’avvolgimento F (Feedback) con la corrente IF , che genera il cam-
po magnetico poloidale verticale ~Bf , parallelo a ~Bv. L’avvolgimento F agisce in
feedback sulla posizione orizzontale del plasma, aggiungendo il suo contributo a
quello dell’avvolgimento V al fine di mantenere l’equilibrio della posizione oriz-
zontale del plasma in caso di variazioni ambientali impreviste. Ha una dinamica
piu veloce di AL-V poiche esso deve agire in feedback.
Gli avvolgimenti V e F agiscono entrambi sulla posizione orizzontale, ma men-
tre l’azione di V e preprogrammata all’inizio dell’esperimento e fornisce la maggior
parte dell’energia necessaria all’equilibrio orizzontale, la corrente che circola nell’av-
volgimento F viene stabilita dinamicamente dal sistema di controllo in funzione della
posizione istantanea del plasma, al fine di mantenere l’equilibrio desiderato. Il tema
centrale della tesi si verte sull’estensione della legge di controllo che nell’esperimento
FTU si occupa di mantenere l’equilibro della posizione orizzontale del plasma.
15

Cap. 1 Fusione termonucleare e FTU 1.3 Frascati Tokamak Upgrade
Il compito di controllare posizione verticale del plasma, meno critico rispetto a
quella orizzontale, viene svolto dall’avvolgimento H che genera il campo ~Bh orizzontale
il quale a sua volta agisce sull’equilibrio verticale del plasma. L’azione di H e in
feedback come quella di F. Data la minima quantita di gas presente nella camera la
potenza richiesta da H e ridotta e questo viene alimentato direttamente dalla rete
Enel.
1.3.1 Sistema di controllo di FTU
Lo schema generale del sistema di controllo e riportato in figura 1.8.
Le azioni degli avvolgimenti che generano campi poloidali sono in feedback, fatta
eccezione per V. L’azione dell’avvolgimento che genera campo toroidale e in feedfo-
ward (ovvero e preprogrammata). Benche sia inserito nell’anello di controreazione,
l’azione dell’avvolgimento V e solo in feedfoward poiche nel controllore il guadagno
della componente in feedback e sempre impostato a zero durante gli esperimenti. La
possibilita di impostare un guadagno diverso da zero e stata mantenuta per poter
assicurare in futuro la possibilita di agire in feedback anche con V.
Il controllore applica un legge di controllo proporzionale-integrativa-derivativa
(PID). Il controllore PID e implementato su un PC dedicato al controllo in feed-
Figura 1.9: Anello di controllo dell’avvolgimento T. LP ed MTP sono rispettivamentel’induttanza della spira di plasma e la mutua induttanza tra l’avvolgimento T e ilplasma.
16

Cap. 1 Fusione termonucleare e FTU 1.3 Frascati Tokamak Upgrade
Figura 1.10: Anello di controllo dell’avvolgimento F. MPF e la mutua induttanza trail plasma e l’avvolgimento F.
back degli avvolgimenti magnetici. Questo computer ospita Linux-RTAI un sistema
operativo real-time che assicura che la legge di controllo, implementata in linguaggio
C, venga eseguita ad ogni passo di campionamento (0.5 ms). Nello schema generale
del sistema di controllo di FTU si utilizza di solito un unico blocco PID. Infatti per
ogni avvolgimento la legge di controllo rimane sempre di tipo PID. Tuttavia la leg-
ge di controllo viene applicata con guadagni (proporzionale, integrativo e derivativo)
differenti a seconda dell’anello di controllo specifico.
Gli anelli di controllo separati sono riportati nelle figure 1.9, 1.10, 1.11.
Nell’anello di controllo dell’avvolgimento T sono presenti due preprogrammati,
uno per la corrente IT ed uno per la corrente di plasma IP . In condizioni ideali la cor-
rente IT preprogrammata indurrebbe una corrente di plasma IP identica a quella del
preprogrammato e conseguentemente si avrebbero i segnali ∆IP e IT,correzione sempre
nulli. A seguito invece di variazioni ambientali impreviste, il controllore PID genera
un segnale IT,correzione non nullo che porta a zero l’errore ∆IP tra la corrente IP reale
ed il suo preprogrammato.
L’anello di controllo dell’avvolgimento F ha come segnali di ingresso i preprogram-
mati della posizione radiale del plasma e il preprogrammato della corrente IF . Un
sistema di misure magnetiche (Magnetic Measurement System, MMS) fornisce la va-
17

Cap. 1 Fusione termonucleare e FTU 1.3 Frascati Tokamak Upgrade
Figura 1.11: Anello di controllo dell’avvolgimento V. MPV e la mutua induttanza trail plasma e l’avvolgimento V.
riabile di errore sul posizionamento orizzontale del plasma nella camera rispetto ai
raggi preprogrammati (come spiegato piu approfonditamente nel successivo sottopa-
ragrafo). In condizioni ideali, la corrente IF preprogrammata posizionerebbe il plasma
nella posizione attesa, e in quel caso la variabile di errore ∆Ψ sarebbe nulla. Il con-
trollore PID reagisce ad errori di posizionamento correggendo il valore della corrente
IF,richiesta all’avvolgimento F e quindi correggendo la posizione orizzontale del plasma.
Lo schema dell’anello di controllo dell’avvolgimento H e identico al precedente.
A cambiare sono i segnali di ingresso, e la misura dell’errore di posizionamento (in
questo caso verticale) fornita dal MMS, oltre che i guadagni del controllore PID.
L’anello di controllo dell’avvolgimento V ha anch’esso lo stesso schema dei due
precedenti. Tuttavia i guadagni del controllore PID di questo anello di control-
lo sono identicamente nulli. Per tanto la corrente IV,richiesta coincide con il suo
preprogrammato, poiche il contributo del controllore e nullo.
Per conoscere la posizione orizzontale del plasma si effettuano delle misure di flus-
so magnetico. Alla corrente di plasma IP e associato il campo magnetico concentrico
~Bp. Il flusso magnetico calcolato su una stessa linea di campo e sempre uguale. Viene
quindi misurato il flusso magnetico in corrispondenza dei raggi orizzontali prepro-
grammati interno ed esterno (vedi figura 1.12). Se la differenza di flusso magnetico
18

Cap. 1 Fusione termonucleare e FTU 1.3 Frascati Tokamak Upgrade
Figura 1.12: Valutazione della posizione orizzontale del plasma attraverso la misuradel flusso magnetico ∆Ψ in corrispondenza dei raggi preprogrammati.
∆Ψ e zero, la misura e stata fatta sulla stessa linea di campo.
Per ottenere un’informazione assoluta sulla posizione del plasma all’interno della
camera, viene fatto in modo (attraverso l’azione dell’avvolgimento V) che la superficie
piu esterna della colonna di plasma venga a coincidere con il raggio interno prepro-
grammato. Cosı facendo ∆Ψ e nullo solo se l’ultima superficie di plasma si trova in
corrispondenza al raggio esterno preprogrammato. L’avvolgimento F e incaricato di
stabilizzare la variabile di errore ∆Ψ sul posizionamento orizzontale. Conoscendo ad
ogni passo di campionamento ∆Ψ, viene calcolata la corrente ∆IF che occorre per
riportare il plasma nella posizione corretta attraverso l’equazione5:
∆IF = −∆Ψ
MPF
Il segnale ∆IF viene processato dal controllore PID che calcola il valore IF di cor-
rezione. Questo segnale viene sommato al preprogrammato di corrente F calcolando
l’effettiva corrente da applicare all’avvolgimento F. Questa richiesta viene fatta ad
5MPF e la mutua induttanza tra la spira di plasma percorsa da IP e l’avvolgimento F percorso
da IF .
19

Cap. 1 Fusione termonucleare e FTU 1.3 Frascati Tokamak Upgrade
AL-F che eroga l’effettiva corrente sull’avvolgimento F. La possibilita di disporre del-
l’attuatore F che in base ad un controllo automatico corregge eventuali variazioni
ambientali aiuta nella maggior parte dei casi a mantenere l’equilibrio. Accade altresı
che in alcuni regimi AL-F abbia dei comportamenti non lineari che non vengono ge-
stiti in maniera ottimale dal PID e che portano ad instabilita. Scopo di questa tesi e
compensare i comportamenti non lineari di AL-F estendendo il controllo automatico
gia presente.
20

Capitolo 2
Instabilita e modello del sistema di
controllo della posizione orizzontale
del plasma di FTU
In questo Capitolo viene esposto il problema dell’instabilita dellaposizione del plasma di FTU per cui e stato proposta una solu-zione nel Capitolo 3. Dopo aver quindi mostrato l’andamento deisegnali in due esperimenti, uno stabile e l’altro instabile, viene mo-strato il modello simulativo dal quale prende le mosse il lavoro cen-trale di questa tesi. Il modello simulativo e stato migliorato nellapresente Tesi e e basandosi sui risultati ottenuti e stato progettataun’estensione della legge di controllo di FTU.
2.1 Analisi degli esperimenti reali e dell’instabilita
In FTU l’esperimento vero e proprio, con presenza di plasma nella camera, dura circa
1.6 secondi. In questo arco di tempo viene assorbita una potenza pari a 410 MVA.
Per la natura impulsiva dell’esperimento questo viene anche detto sparo.
Il periodo di tempo in cui il sistema di controllo aziona gli avvolgimenti elettrici e
di circa 2 secondi e varia a seconda dell’avvolgimento che si considera.
Lo sparo numero 28000 ha avuto un esito positivo. Questo lo si desume, per
21

Cap. 2 Instabilita e modello del sistema di controllo della posizione orizzontale del plasma
di FTU 2.1 Analisi degli esperimenti reali e dell’instabilita
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−1000
0
1000
2000
3000
4000
5000
6000
7000
tempo [s]
corr
ente
[A]
Sparo numero 28000
preprogrammato IF
IF erogata
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
tempo [s]
Flu
sso
mag
netic
o [W
b]
Sparo numero 28000
Delta Psi
Figura 2.1: Sparo stabile 28000: a sinistra la corrente IF e suo preprogrammato, adestra l’errore di posizionamento ∆Ψ.
quanto riguarda la posizione orizzontale del plasma, osservando l’andamento di ∆Ψ
nel tempo in figura 2.1.
Dopo un breve e contenuto transitorio iniziale, conclusosi a 0.4 s, la variabile ∆Ψ
si maniene nell’intorno di zero. Le oscillazioni ad alta frequenza che si riscontrano
sono rumore sovrapposto alla misura sperimentale. In questo esperimento il sistema
di controllo, ed in particolare l’anello di controllo dell’avvolgimento F, hanno portato
a zero con successo l’errore di posizionamento orizzontale del plasma.
In figura 2.1 si vede come la corrente IF segua in maniera stabile la forma d’onda
del preprogrammato (componente feedfoward del segnale), anche se con una differenza
di circa 1000 A che deriva dal segnale di feedback. Questa differenza non e sintomo
negativo, perche quello che viene stabilizzato dal sistema di controllo e l’errore sul
posizionamento del plasma e non l’ampiezza del segnale di correzione della corrente
IF . In figura 2.2 si vede invece come il preprogrammato della corrente IV sia seguito
del tutto fedelmente dall’andamento della corrente effettivamente erogata per l’assenza
di un segnale di correzione a feedback.
22

Cap. 2 Instabilita e modello del sistema di controllo della posizione orizzontale del plasma
di FTU 2.1 Analisi degli esperimenti reali e dell’instabilita
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2x 10
4
tempo [s]
corr
ente
[A]
Sparo numero 28000
preprogrammato IT
IT erogata
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−8
−7
−6
−5
−4
−3
−2
−1
0
1x 10
5
tempo [s]co
rren
te [A
]
Sparo numero 28000
preprogrammato IP
IP erogata
Figura 2.2: Sparo stabile 28000: A sinistra la corrente erogata IT del trasformatorecentrale, a destra la corrente erogata di plasma IP e i loro preprogrammati. Si notacome la corrente di plasma IP , essendo indotta dalla corrente IT , sia proporzionale a− d
dt[IT ].
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−1000
0
1000
2000
3000
4000
5000
6000
tempo [s]
corr
ente
[A]
Sparo numero 28000
preprogrammato IV
IV erogata
−3 −2 −1 0 1 2 3 4 50
0.5
1
1.5
2
2.5
3x 10
4
tempo [s]
corr
ente
[A]
Sparo numero 28000
preprogrammato corrente campo toroidalecorrente campo toroidale erogata
Figura 2.3: Sparo stabile 28000: A destra la corrente erogata IV e a sinistra la correnteerogata Itor che alimenta il campo toroidale ~Bt e i loro preprogrammati. Il campomagnetico toroidale ~Bt non agisce sensibilmente sull’equilibrio orizzontale del plasmanella camera.
23

Cap. 2 Instabilita e modello del sistema di controllo della posizione orizzontale del plasma
di FTU 2.1 Analisi degli esperimenti reali e dell’instabilita
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
tempo [s]
Flu
sso
mag
netic
o [W
b]
Sparo numero 20838
Delta Psi
0.2 0.4 0.6 0.8 1 1.2 1.4 1.61.16
1.17
1.18
1.19
1.2
1.21
1.22
1.23
1.24
tempo [s]
Pos
izio
ne [m
]
Sparo numero 20838
preprogrammato raggio esternoraggio esterno reale
Figura 2.4: Sparo instabile 20838: a sinistra errore di posizionamento ∆Ψ, a destraraggio esterno del plasma e il suo preprogrammato.
La quasi totalita degli esperimenti in cui l’ampiezza della corrente IF ha superato
i 1200 A hanno avuto esito positivo come il 28000.
Per completezza vengono riportati nelle figure 2.2 e 2.3 le correnti IT , IP , IV , Itor.
L’esperimento numero 20838 e stato soggetto ad instabilita. Questo lo si puo de-
sumere dall’andamento di ∆Ψ, e del raggio esterno (vedi figura 2.4). Si nota come
nella parte centrale dell’esperimento l’andamento di ∆Ψ sia caratterizzato da un’am-
pia oscillazione distinguibile dal rumore per la sua frequenza molto piu bassa e dalla
sua maggiore ampiezza. Si vede come il segnale del raggio esterno saturi in corrispon-
denza del valore 1.235 m. In questa posizione sono posti dei limiter, che impediscono
al plasma di entrare in contatto con la parete vera e propria della camera. Durante il
regime di instabilita il plasma sta continuamente urtando i limiter con il rischio reale
di danneggiare la macchina.
In questo esperimento con riferimento alla figura 2.5, le richieste preprogrammate
per le correnti IF ed IV sono minori rispetto allo sparo 28000. Se la corrente IV ,
rispondendo solo al suo preprogrammato, insegue correttamente il suo riferimento,
24

Cap. 2 Instabilita e modello del sistema di controllo della posizione orizzontale del plasma
di FTU 2.1 Analisi degli esperimenti reali e dell’instabilita
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−2000
−1500
−1000
−500
0
500
1000
1500
2000
2500
tempo [s]
corr
ente
[A]
Sparo numero 20838
preprogrammato IF
IF erogata
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−1000
0
1000
2000
3000
4000
5000
tempo [s]
corr
ente
[A]
Sparo numero 20838
preprogrammato IV
IV erogata
Figura 2.5: Sparo instabile 20838: a sinistra corrente IF e il suo preprogrammato, adestra corrente IV e il suo preprogrammato.
la corrente IF invece essendo in feedback sulla posizione orizzontale e soggetta ad
oscillazione.
L’instabilita si presenta spesso negli spari in cui l’ampiezza della corrente IF oscilla
intorno al valore 1200 A oppure e al di sotto di questa soglia. Il tipo di instabilita
che si riscontra e sintomo di una non linearita del sistema in quanto le dinamiche
associate ad alti e bassi regimi di AL-F sono discordi. Il tema centrale della Tesi,
sviluppato nel Capitolo 3, e stato l’estensione della legge di controllo di FTU al fine
di compensare tali non linearita.
Si e gia spiegato come gli avvolgimenti V ed F compiano la stessa azione di con-
tenimento del plasma. Pertanto, dato un certo riferimento per la corrente di plasma,
sara necessaria un’azione di contenimento adeguata che potra essere suddivisa nelle
azioni congiunte degli avvolgimenti V ed F. Ragionando sui preprogrammati delle
due correnti ed analizzando la dinamica degli esperimenti, si nota che a parita di
corrente di plasma, quando l’azione di contenimento e svolta in maniera prevalente
dall’avvolgimento V e l’avvolgimento F lavora a bassi regimi, si verifica spesso in-
25

Cap. 2 Instabilita e modello del sistema di controllo della posizione orizzontale del plasma
di FTU 2.2 Modello dell’anello di controllo della posizione orizzontale
stabilita nell’esperimento reale, come nello sparo 20838. Quando viceversa l’azione
dell’avvolgimento F e piu marcata il comportamento del sistema e stabile, come nello
sparo 28000. Cio porta a pensare che l’instabilita non risieda in cause attribuibili al
comportamento del plasma, ma al comportamento non lineare del convertitore AL-F.
Di fatto il convertitore AL-F, come spiegato in [4], e caratterizzato da una dinamica
non lineare, causa molto probabile dell’instabilita. La non linearita si presenta qualora
l’ampiezza di corrente IF attraversi la soglia dei 1200 A. La corrente erogata da AL-F
e la differenza tra le correnti che scorrono nei due ponti a tiristori da cui e composto.
Per richieste in ampiezza minori di 1200 A scorre corrente in entrambi i ponti, mentre
quando si supera questa richiesta viene disattivato uno dei ponti e tutta la corrente
viene erogata da un unico ponte.
2.2 Modello dell’anello di controllo della posizione
orizzontale
Per proporre una soluzione all’instabilita e stato necessario ricavare un modello simu-
lativo dell’anello di controllo della posizione orizzontale del plasma di FTU. Questo
lavoro e stato svolto nelle tesi [3], [4], [5] e proseguito nella presente Tesi migliorando
i risultati ottenuti precedentemente. In [3] e stato modellizzato il controllore PID
Figura 2.6: Modello simulativo del convertitore AL-F.
26

Cap. 2 Instabilita e modello del sistema di controllo della posizione orizzontale del plasma
di FTU 2.2 Modello dell’anello di controllo della posizione orizzontale
Figura 2.7: Modello simulativo di base del reale ed attuale anello di controllo dellaposizione orizzontale del plasma di FTU.
dell’esperimento reale. Inoltre e stata iniziata la modellizzazione di AL-F, portata
a termine in [4] (figura 2.6). In [5] e stato modellizzato l’anello di controllo della
posizione orizzontale del plasma di FTU (vedi figura 2.7). Nella presente Tesi e stato
migliorata l’accuratezza di quest’ultimo e la sua capacita di riprodurre il compor-
tamento reale di FTU. Questo modello migliorato e il punto di partenza sul quale
viene elaborata nel Capitolo 3 della Tesi la soluzione all’instabilita. Esso simula il
comportamento reale dell’anello di controllo partendo dai preprogrammati degli espe-
rimenti reali delle correnti IF , IV , IP . I preprogrammati delle correnti vengono pesati
con delle costanti moltiplicative che rappresentano le rispettive capacita di interven-
to sull’equilibrio del plasma. Esso contiene i modelli simulativi del controllore PID,
del convertitore AL-F, e della risposta del plasma all’azione delle correnti suddet-
te. Quest’ultimo ha in ingresso la corrente IF erogata da AL-F, il contributo fornito
dall’avvolgimento V, e dalla corrente di plasma IP ed ha come uscita la variabile di
errore sul posizionamento orizzontale ∆Ψ. L’azione congiunta di IF ed IV opera il
contenimento della corrente di plasma IP , al fine di mantenere in equilibrio il plasma
e minimizzare ∆Ψ. Esso e rappresentato da un sistema lineare del primo ordine che
descrive con grande approssimazione la caratteristica ingresso-uscita tra i segnali di
controllo ed il segnale ∆Ψ.
27

Cap. 2 Instabilita e modello del sistema di controllo della posizione orizzontale del plasma
di FTU 2.2 Modello dell’anello di controllo della posizione orizzontale
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−1000
0
1000
2000
3000
4000
5000
6000
7000
tempo [s]
corr
ente
[A]
Sparo numero 28000
Corrente IF,erogata
Corrente IF,erogata
simulata con modello originale
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−1
−0.5
0
0.5
1
1.5x 10
4
tempo [s]co
rren
te [A
]
Sparo numero 28000
Corrente IF,erogata
Corrente IF,erogata
simulata con modello originale
Figura 2.8: Simulazione sparo stabile 28000: a sinistra la corrente IF reale e simulatanel modello migliorato nella Tesi di fig. 2.7, a destra i risultati simulativi sullo stessosparo con il precedente modello.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
tempo [s]
fluss
o m
agne
tico
[Wb]
Sparo numero 28000
Delta Psi realeDelta Psi simulata con modello originale
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
tempo [s]
fluss
o m
agne
tico
[Wb]
Sparo numero 28000
Delta Psi realeDelta Psi simulata con modello originale
Figura 2.9: Simulazione sparo stabile 28000: a sinistra l’errore ∆Ψ reale e simulatonel modello migliorato nella Tesi di fig. 2.7, a destra i risultati simulativi sullo stessosparo con il precedente modello.
28

Cap. 2 Instabilita e modello del sistema di controllo della posizione orizzontale del plasma
di FTU 2.2 Modello dell’anello di controllo della posizione orizzontale
2.2.1 Miglioramento del modello simulativo
In questa Tesi si e intervenuto nel modello simulativo preesistente correggendo la
funzione di trasferimento della risposta del plasma all’azione degli avvolgimenti elet-
trici coinvolti nell’equilibrio della posizione orizzontale. La funzione di trasferimento
precedente P (s) e la nuova P (s) sono mostrate di seguito:
P (s) =k · s
τ · s + 1=−6.875 · 10−7 · s
0.008 · s + 1⇒ P (s) =
k · s
τ · s + 1=−3.4375 · 10−7 · s
0.008 · s + 1
Inoltre sono stati corretti le costanti proporzionali che pesano il contributo dei
preprogrammati delle correnti IF , IV , IP nel modello simulativo. Le suddette costanti
sono state trovate mediante l’equazione:
gP · IP,prep + gV · IV,prep + gF · IF,prep = 0
dove si intendono con gP , gV , gF i pesi delle rispettive correnti e con IP,prep, IV,prep,
IF,prep i valori di regime dei preprogrammati delle correnti. Di fatto questa equazione
viene utilizzata negli esperimenti reali per stabilire i valori dei preprogrammati delle
correnti suddette ed ottenere l’equilibrio della posizione orizzontale del plasma. Nel
modello simulativo si e scelto di impostare gF = 1. Conoscendo rispettivamente per
gli avvolgimenti V ed F la quantita di flusso magnetico prodotto per KA, ovvero
272 G/KA e 63 G/KA, e stato possibile ottenere gV come il rapporto tra queste
due quantita. Infine e stato ottenuto il valore del peso gP della corrente di plasma IP
sull’equilibrio della posizione orizzontale del plasma di FTU invertendo la precendente
equazione.
Vengono confrontati nelle figure 2.8 e 2.9 i risultati ottenuti dal modello simulativo
precedente e da quello migliorato in questa Tesi sullo sparo stabile 28000. Le simula-
zioni precedenti presentato un’evidente discordanza con le misure reali nel transitorio
29

Cap. 2 Instabilita e modello del sistema di controllo della posizione orizzontale del plasma
di FTU 2.2 Modello dell’anello di controllo della posizione orizzontale
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−2000
−1500
−1000
−500
0
500
1000
1500
2000
2500
3000
tempo [s]
corr
ente
[A]
Sparo numero 20838
Corrente IF,erogata
Corrente IF,erogata
simulata con modello originale
Preprgrammato corrente IF
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−2000
−1500
−1000
−500
0
500
1000
1500
2000
2500
tempo [s]
corr
ente
[A]
Sparo numero 20838
Corrente IF,erogata
Corrente IF,erogata
simulata con modello originale
Preprgrammato corrente IF
Figura 2.10: Simulazione sparo instabile 20838: a sinistra corrente IF reale e simulatanel modello di figura 2.7 senza perturbazione dell’equilibrio, a destra stessa simulazio-ne con inserimento del disturbo delle radiofrequenze. Solo nel secondo caso la correnteIF simulata entra in oscillazione essendo all’interno del regime di non linearita dell’at-tuatore. La causa del comportamento ambivalente e da attribuire alle non linearitaintrodotte da AL-F.
iniziale per quanto riguarda la corrente IF,erogata e l’errore di posizionamento ∆Ψ. Nel
modello simulativo attuale e stato migliorato il comportamento nel regime transitorio.
La corrente IF,erogata non presenta piu l’inesatto transitorio precedente e l’errore ∆Ψ
riproduce in maniera piu fedele il segnale reale, anche per quanto riguarda l’ordine di
grandezza del segnale. In ogni caso cio che dimostra la bonta del modello e il fatto
che esauriti i transitori iniziali il modello del sistema di controllo, benche semplificato,
riproduca correttamente il comportamento del sistema reale.
Il risultato fondamentale ottenuto mediante il modello simulativo e la riproduzione
dell’instabilia a cui e soggetto il sistema di controllo di FTU. Nello sparo instabile
20838 all’istante 0.45 s vengono attivati i sistemi di irraggiamento a radiofrequenze
per il riscaldamento addizionale del plasma. Di conseguenza l’equilibrio della posizio-
ne del plasma viene perturbato da questo fenomeno assimilabile, dal punto di vista
dell’anello di controllo in esame, ad un distrubo esterno che si va a sommare all’azio-
30

Cap. 2 Instabilita e modello del sistema di controllo della posizione orizzontale del plasma
di FTU 2.2 Modello dell’anello di controllo della posizione orizzontale
Figura 2.11: Modello simulativo lineare dell’anello di controllo della posizione oriz-zontale del plasma di FTU. E stata eliminata la non linearita di AL-F e sostituitacon un ritardo di un passo di campionamento. Esso simula il funzionamento idealedell’anello di controllo.
ne di controllo degli avvolgimenti elettrici. A seguito di cio la corrente in feedback
IF,erogata si e spostata sul un valore diverso da quello del preprogrammato nel ten-
tativo di mantenere comunque l’equilibrio. In questo modo pero IF,erogata e entrata
nel regime di non linearita del convertitore AL-F e conseguentemente si e innescata
l’instabilita (vedi figura 2.10).
Nel modello simulativo che prevede come ingressi solo i preprogrammati delle
correnti IP , IV , IF dopo un transitorio iniziale la corrente IF,erogata si assesta sul pre-
programmato (vedi figura 2.10 a sinistra). In figura 2.10 a sinistra viene ripetuta
la simulazione dopo aver inserito un disturbo che riproduce lo stesso fenomeno di
perturbazione dell’equilibrio della posizione orizzontale del plasma, ovvero una varia-
zione della corrente IF,erogata a seguito della quale essa transita all’interno del regime
critico. A seguito di questo il modello simulativo allo stesso modo dell’esperimento
reale entra in oscillazione. L’instabilita viene quindi riprodotta dal modello anche se
con forme d’onda differenti da quelle della realta. Ottenere le medesime forme d’onda
per esperimenti instabili significherebbe disporre di un modello perfetto del sistema in
esame. D’altra parte se il regime di instabilita viene riprodotto in simulazione questo
indica che il modello ha colto la causa scatenante l’instabilita reale.
31

Cap. 2 Instabilita e modello del sistema di controllo della posizione orizzontale del plasma
di FTU 2.2 Modello dell’anello di controllo della posizione orizzontale
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−2000
−1500
−1000
−500
0
500
1000
1500
2000
2500
tempo [s]
corr
ente
[A]
Sparo numero 20838
Preprogrammato IF
Corrente IF,erogata
Corrente IF,erogata
modello lineare
Figura 2.12: Simulazione sparo 20838: La corrente IF,erogata simulata nel modello infig. 2.11, il suo preprogrammato e la corrente reale. Eliminando in simulazione la nonlinearita di AL-F anche l’instabilita viene meno. La rampa di corrente IF,erogata chesi nota in simulazione e dovuta alla rampa del preprogrammato della stessa.
2.2.2 Funzionamento ideale dell’anello di controllo
Nello schema di controllo in figura 2.7 l’unico componente non lineare e il modello
del convertitore AL-F. Pertanto nelle simulazioni esso e sicuramente la causa dell’in-
stabilita e del comportamento ambivalente che il modello simulativo ha a seconda del
valore della corrente IF . Infatti uguagliando la corrente erogata con quella richiesta
(condizione ideale) si e proceduto alla verifica di come venga meno l’instabilita negli
spari instabili. Per fare questo in figura 2.11 si e sostituito al blocco AL-F con un
ritardo di un passo di campionamento del sistema di controllo pari a 0.5 ms per non
incorrere in un loop algebrico. Come si vede in figura 2.12 eliminando le non linearita
introdotte dall’attuatore AL-F, ed uguagliando in via del tutto teorica la richiesta e
l’erogazione della corrente IF , la stessa corrente non entra piu in oscillazione sebbene
in questa simulazione sia presente il disturbo delle radiofrequenze sull’equilibrio della
posizione orizzontale del plasma che fa entrare la corrente IF nel regime critico.
La soluzione proposta in questa Tesi per oviare all’instabilita dell’anello di con-
32

Cap. 2 Instabilita e modello del sistema di controllo della posizione orizzontale del plasma
di FTU 2.2 Modello dell’anello di controllo della posizione orizzontale
trollo della posizione orizzontale del plasma di FTU viene esposta nel Capitolo 3.
Essa si basa sulla compensazione della non linearita di AL-F al fine di riprodurre il
comportamento ideale del modello in figura 2.11.
2.2.3 Analisi di stabilita dell’anello di controllo lineare
Viene di seguito mostrata l’analisi di stabilita che e stata eseguita sul modello lineare
dell’anello di controllo (vedi figura 2.11) il cui comportamento ideale e stato discusso
nel sottopragrafo 2.2.2. L’analisi di stabilita e stata effettuata a tempo continuo
mediante i diagrammi di Bode. Per effettuare l’analisi le funzioni di trasferimento
a tempo discreto del controllore PID e del ritardo unitario sono state convertite a
tempo continuo.
Il controllore PID e implementato su un computer che esegue la legge di controllo
ogni Ts = 0.5 ms. Per tanto la sua funzione di trasferimento e a tempo discreto. Dallo
stesso codice C della legge di controllo si ricava:
yc(n) = kd · yd(n) + ki · yi(n) + kp · uc(n)
yd(n) =uc(n)− uc(n− 1)
Ts + τ+
τ · yd(n− 1)
Ts + τ
yi(n) =1
2· Ts · (uc(n) + uc(n− 1)) + yi(n− 1)
dove yc e uc sono l’uscita e l’ingresso del controllore PID, kp, ki, kd sono i guadagni
proporzionale, integrativo e derivativo, e yd yi sono i contributi dei rami derivativo e
integrativo all’uscita complessiva yc, e τ una costante pari a 0.004 s. Si ricava quindi
la funzione di trasferimento tra yc e uc:
Yc(z) =
(
Kp + Ki ·Ts
s·z + 1
z − 1+ Kd ·
z − 1
(τ + Ts) · z − 1
)
· U(z)
I guadagni kp, ki, kd del controllore PID non sono costanti nel tempo e il loro
andamento viene riportato in figura 2.13. Questa scelta e motivata dal fatto che negli
33

Cap. 2 Instabilita e modello del sistema di controllo della posizione orizzontale del plasma
di FTU 2.2 Modello dell’anello di controllo della posizione orizzontale
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.05
0.1
0.15
0.2
tempo [s]
Sparo numero 28000
K
d,IF
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
10
20
30
tempo [s]
K
i,IF
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
2
4
6x 10
−4
tempo [s]
K
p,IF
Figura 2.13: Guadagni del controllore PID dell’avvolgimento F dello sparo 28000.
istanti immediatamente successivi al tempo zero il plasma non si e ancora formato,
mentre si e del tutto esaurito nella fase finale e quindi il sistema di controllo non
dovrebbe agire pienamente in questi due periodi.
Per l’analisi di stabilita sono stati utilizzati i valori di flat-top del controllore PID.
La funzione di trasferimento a tempo discreto del controllore e quella del ritardo
unitario sono state poi convertite a tempo continuo mediante il metodo di Tustin
discusso nel Capitolo 4. Ottenuta la funzione di traferimento a tempo continuo della
catena aperta dell’anello di controllo e stata analizzata la stabilita del sistema tramite
i diagrammi di Bode. Come si vede in figura 2.14 si ha che i diagramma dei moduli
della risposta in frequesta della catena aperta e sempre al di sotto del valore 0 dB
per tanto il sistema e asintoticamente stabile. Questo risultato e in accordo con
l’esito delle simulazioni del modello lineare che non sono soggette ad oscillazione (vedi
figura 2.12). E da sottolineare come invece l’introduzione del modello non lineare del
convertore AL-F ingeneri instabilita nel sistema a bassi regimi di corrente (vedi figura
2.10).
34

Cap. 2 Instabilita e modello del sistema di controllo della posizione orizzontale del plasma
di FTU 2.2 Modello dell’anello di controllo della posizione orizzontale
−10
−9.5
−9
−8.5
−8
−7.5
−7
−6.5
−6
−5.5
−5
Mag
nitu
de (
dB)
10−4
10−3
10−2
10−1
100
101
102
103
104
105
106
−180
−90
0
90
180
270
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
Figura 2.14: Diagrammi di Bode della funzione di traferimento in catena apertadel modello simulativo lineare dell’anello di controllo della posizione orizzontale delplasma di FTU rappresentato in figura 2.11.
L’analisi di stabilita e stata necessaria sopratutto per il motivo che la soluzione
progettata per oviare all’instabilita dell’anello di controllo di FTU ed esposta nel Ca-
pitolo 3 si pone come obiettivo quello di recuperare la prestazione ideale del sistema,
ovvero quella in cui le richieste di corrente fatte al convertitore AL-F vengono sod-
disfatte istantaneamente. Il modello simulativo di figura 2.11 simula, a meno di un
passo di campionamento tra corrente IF richiesta ed erogata, questo comportamento
ideale. Sebbene sia chiaro come in questo modello ideale sia assente la dinamica non
lineare del modello di AL-F andava comunque dimostrata la sua stabilita prima di
procedere all’applicazione della tecnica di compensazione anti-windup su cui si basa
il progetto di estensione della legge di controllo di FTU, lavoro centrale della Tesi.
35

Capitolo 3
Soluzione per la stabilizzazione
della posizione orizzontale del
plasma di FTU
Questo Capitolo espone la soluzione adottata per oviare all’insta-bilita dell’anello di controllo della posizione orizzontale del plasmadi FTU. Si tratta del tema centrale della tesi, che si basa sullaprecedente modellazione dell’anello di controllo (Capitolo 2) e cheviene seguita dall’implementazione in codice della stessa soluzione(Capitolo 4).
L’instabilita della quale e affetto il sistema di controllo di FTU si presenta solo
a bassi regimi di funzionamento di AL-F, mentre scompare ad alti regimi. Questo
doppio comportamento e causato dalla non linearita di AL-F, che la legge di controllo
attuale non e capace di gestire. D’altra parte la maggior parte degli esperimenti non
sono soggetti ad instabilita, a testimonianza di una corretta gestione in questi casi
dell’equilibrio orizzontale del plasma da parte del controllore PID.
Si ha quindi necessita di una legge di controllo che:
• Non si sostituisca a quella presente ma la estenda, permettendo la corretta
gestione dei fenomeni di non linearita.
• Compensi le non linearita dell’attuatore AL-F eliminando le instabilita.
36

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.1 Compensazione anti-windup
• Sia attivo solo nel regime di instabilita e non alteri il funzionamento dell’attuale
legge di controllo nel regime di stabilita.
3.1 Compensazione anti-windup
La scelta di una soluzione atta a soddisfare le specifiche elencate sopra e ricaduta
sulla strategia di compensazione anti-windup (vedi [1]). Lo spirito con cui nasce, e
le esigenze a cui risponde la soluzione anti-windup sono esattamente le richieste del
problema in esame. Lo scenario standard (vedi figura 3.1) in cui e stato sviluppato la
politica di compensazione anti-windup e il seguente:
• Il processo da controllare e caratterizzato da una dinamica lineare e da una
funzione di trasferimento P (s).
• E presente una saturazione per il segnale di controllo u del processo P (s) che
rende il sistema complessivo non lineare.
• Per inseguire con yL il riferimento r e stato precedentemente progettato il con-
trollore lineare C(s), senza tener conto della non linearita del sistema. C(s)
rende stabile asintoticamente, ad ogni regime, il sistema lineare in cui non e
presente la saturazione.
Figura 3.1: Scenario simulativo in cui e stata sviluppata la tecnica di compensazionestandard anti-windup.
37
Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.1 Compensazione anti-windup
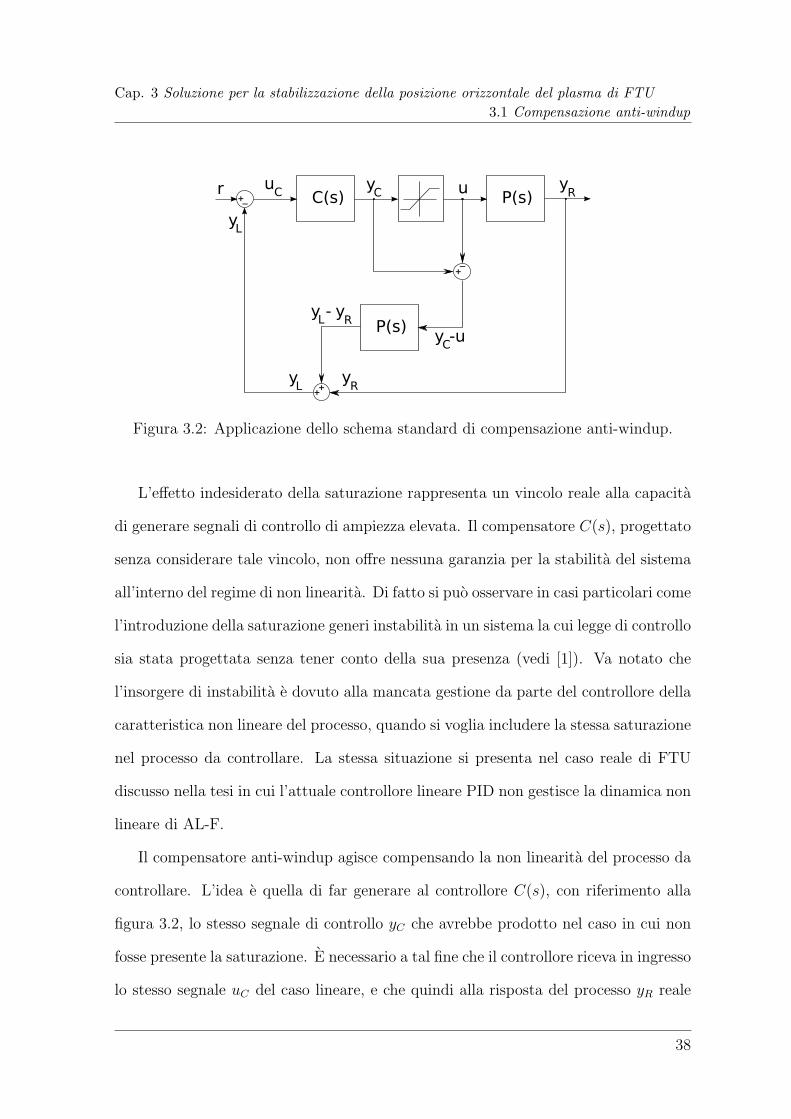
Figura 3.2: Applicazione dello schema standard di compensazione anti-windup.
L’effetto indesiderato della saturazione rappresenta un vincolo reale alla capacita
di generare segnali di controllo di ampiezza elevata. Il compensatore C(s), progettato
senza considerare tale vincolo, non offre nessuna garanzia per la stabilita del sistema
all’interno del regime di non linearita. Di fatto si puo osservare in casi particolari come
l’introduzione della saturazione generi instabilita in un sistema la cui legge di controllo
sia stata progettata senza tener conto della sua presenza (vedi [1]). Va notato che
l’insorgere di instabilita e dovuto alla mancata gestione da parte del controllore della
caratteristica non lineare del processo, quando si voglia includere la stessa saturazione
nel processo da controllare. La stessa situazione si presenta nel caso reale di FTU
discusso nella tesi in cui l’attuale controllore lineare PID non gestisce la dinamica non
lineare di AL-F.
Il compensatore anti-windup agisce compensando la non linearita del processo da
controllare. L’idea e quella di far generare al controllore C(s), con riferimento alla
figura 3.2, lo stesso segnale di controllo yC che avrebbe prodotto nel caso in cui non
fosse presente la saturazione. E necessario a tal fine che il controllore riceva in ingresso
lo stesso segnale uC del caso lineare, e che quindi alla risposta del processo yR reale
38

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.2 Applicazione della compensazione anti-windup al sistema di controllo di FTU
venga aggiunta la differenza tra la risposta yL del sistema lineare e quella del sistema
reale yR. Questo scarto tra la risposta dinamica dei due sistemi viene calcolato dal
compensatore anti-windup a partire dai segnali yC e u.
All’interno del compensatore anti-windup e presente una copia replicata del pro-
cesso da controllare. Questa riceve in ingresso la differenza tra il segnale di controllo
yC prodotto dal controllore lineare e il segnale di controllo u effettivamente applicato
al processo P (s), e genera lo scarto yL − yR tra le risposte dinamiche lineare e reale
che viene poi sommato all’uscita yR del sistema reale. Si puo dimostrare (vedi [1])
che con la soluzione anti-windup il controllore C(s) genera in ogni istante lo stesso
segnale di controllo del caso lineare, e ancora piu importante che se C(s) stabilizza-
va il sistema a ciclo chiuso lineare non saturato e se P (s) e asintoticamente stabile
allora l’introduzione del compensatore anti-windup nella forma descritta mantiene la
stabilita del sistema ad ogni regime di funzionamento.
3.2 Applicazione della compensazione anti-windup
al sistema di controllo di FTU
Nell’ipotesi che la risposta del plasma di FTU all’azione delle correnti IF , IV ed IP
sia sufficientemente lineare, si puo riconoscere nell’anello di controllo della posizione
orizzontale (figura 2.7) lo scenario in cui e possibile applicare la soluzione di compen-
sazione anti-windup. L’effetto indesiderato nell’anello di controllo e la non linearita
del convertitore AL-F. Dal punto di vista logico e schematico l’intero blocco funzio-
nale AL-F rappresenta l’effetto indesiderato, poiche i suoi segnali di ingresso e uscita
sono rispettivamente le correnti IF,richiesta ed IF,erogata. D’altra parte dal punto di vi-
sta pratico il convertitore AL-F e l’attuatore che, a partire da una richiesta numerica
proveniente dal sistema di controllo, fornisce la potenza necessaria per produrre la
39

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.2 Applicazione della compensazione anti-windup al sistema di controllo di FTU
corrente reale IF . La presenza di AL-F e quindi imprescindibile, ma la sua caratteri-
stica ingresso-uscita, discontinua e non lineare, e la causa dell’instabilita del sistema.
Invece garanzie sulla linearita della risposta del plasma sono date oltre che dagli ar-
gomenti esposti precedentemente, anche dal fatto che nella maggior parte degli spari
il controllore lineare PID offre un segnale di controllo stabilizzante per il plasma.
Figura 3.3: Inserimento nello schema di controllo della posizione orizzontale delplasma di FTU del compensatore anti-windup di base.
3.2.1 Progetto di un compensatore anti-windup di base
Viene di seguito esposto il progetto di estensione del sistema di controllo di FTU per
mezzo dell’inserimento nell’anello della posizione orizzontale del plasma del compen-
satore anti-windup di base. Con riferimento alla figura 3.3 il compensatore riceve
come ingressi i due segnali IF,desiderata e IF,reale che sono ingresso e uscita del compo-
nente non lineare AL-F. Il compensatore anti-windup produce in uscita il segnale di
40

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.2 Applicazione della compensazione anti-windup al sistema di controllo di FTU
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−2500
−2000
−1500
−1000
−500
0
500
tempo [s]
corr
ente
[A]
Sparo numero 20838
Correzione IF,erogata
modello lineare
Correzione IF,erogata
modello con compensatore anti−windup di base
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−4
−3
−2
−1
0
1
2
3
4
5x 10
−8
tempo [s]
corr
ente
[A]
Sparo numero 20838
Errore correzione IF,erogata
modello lineare − compensatore anti−windup di base
Figura 3.4: Simulazione sparo instabile 20838: a sinistra il segnale di correzione dellacorrente IF prodotto dal controllore PID nel modello lineare in fig. 2.11 e in quellonon lineare compensato in fig. 3.7, a destra l’errore tra i due segnali. L’azione delcompensatore permesso al controllore PID di generare il segnale di controllo idealeche viene prodotto nel modello lineare.
.
correzione ∆Ψdesiderato−∆Ψreale, che viene sommato al segnale di errore reale ∆Ψreale.
Al controllore PID viene quindi fornito un segnale di errore differente da quello reale,
perche corretto dal contributo del compensatore introdotto, ma che corrisponde al
caso ideale in cui AL-F sia logicamente trasparente, ovvero in cui IF,desiderata e IF,reale
coincidano. Per quanto mostrato nel sottoparagrafo 2.2.2 in questa situazione le si-
mulazioni prevedono che il controllore PID, a partire dal segnale di errore ∆Ψdesideato,
generera un segnale di controllo che stabilizza il plasma anche per gli spari instabili.
All’interno del compensatore, come nello schema generale, calcolato il segnale di
differenza tra IF,desiderata e IF,reale, esso viene usato come ingresso per una replica del
processo plasma da controllare (blocco funzionale Modello PLASMA) la quale produce
lo scarto tra la risposta dinamica desiderata e reale. Gioca un ruolo fondamentale
in questo frangente la linearita del modello della risposta orizzontale del plasma. E
grazie a questa proprieta che, a partire dalla differenza degli ingressi di corrente reale
41

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.2 Applicazione della compensazione anti-windup al sistema di controllo di FTU
e desiderata, la risposta del modello coincide nella differenza tra le singole risposte
del plasma ad una corrente desiderata e alla corrente effettivamente erogata.
Una dissomiglianza tra lo scenario standard in cui e stata sviluppata la politica
di compensazione anti-windup e l’anello di controllo in esame e la seguente: nello
schema di controllo proposto in figura 3.3 il preprogrammato della corrente IF non
viene processato dal controllore, come viene fatto per il riferimento del sistema nello
schema standard della soluzione anti-windup, ma sommato direttamente al segnale
di correzione. Il motivo e che il segnale ∆Ψ rappresenta esso stesso il segnale di
errore che si vuole minimizzare. I veri riferimenti che vengono inseguiti nell’anello di
controllo della posizione del plasma di FTU non sono i preprogrammati delle correnti
degli avvolgimenti elettrici, ma sono i preprogrammati dei raggi del plasma. Al fine di
minimizzare l’errore di posizionamento ∆Ψ rispetto ai raggi preprogrammati il sistema
di controllo applica agli avvolgimenti le correnti opportune che sono in generale somma
di un segnale preprogrammato e di un segnale di correzione.
Inoltre i preprogrammati delle correnti IV e IP non danno contributo all’ingresso
del compensatore anti-windup, il quale si occupa solo di compensare le non linearita
di AL-F.
Esiste un ostacolo tecnico all’estensione della legge di controllo nella maniera ap-
pena proposta e rappresentata in figura 3.3. Durante l’esperimento non e possibile
disporre in tempo reale del segnale della corrente IF effettivamente erogata. Per
questo motivo sarebbe impossibile valutare la differenza tra IF,desiderata e IF,reale. In
questo frangente si rivela particolarmente utile l’accurata modellizzazione fatta del
convertitore AL-F in [4]. A causa di questo ostacolo nel progetto del compensatore
e stato incluso il modello di AL-F (blocco funzionale Modello AL-F ), come rappre-
sentato nello schema di figura 3.5, in modo tale da avere nell’esperimento una stima
42

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.2 Applicazione della compensazione anti-windup al sistema di controllo di FTU
Figura 3.5: Estensione del compensatore anti-windup con il modello internodell’attuatore AL-F rappresentato dal blocco funzionale Modello AL-F.
in tempo reale della corrente IF erogata. Ottenuta la stima della corrente erogata si
puo calcolare il segnale di ingresso per il modello del plasma interno al compensatore,
e ottenere l’uscita dello stesso.
Nel modello dello schema di controllo di figura 3.5 esiste un loop algebrico. Loop
algebrici si verificano quando un segnale dipende da se stesso istantaneamente. Alle
volte e possibile risolvere un loop algebrico quando esso maschera un’equazione impli-
cita tra un segnale di ingresso e uno di uscita. Il loop algebrico viene evidenziato in
figura 3.6. Il loop si verifica in quanto i blocchi PID e Modello PLASMA contengono
dei guadagni istantanei tra ingresso e uscita.
Il loop algebrico non viene risolto on-line durante la simulazione dall’ambiente
simulativo adottato Simulink. Al fine di risolvere il problema e stato introdotto un
ritardo pari ad un passo di campionamento del sistema di controllo reale. L’introdu-
43

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.2 Applicazione della compensazione anti-windup al sistema di controllo di FTU
Figura 3.6: Evidenziazione del loop algebrico presente nello schema di controllo in cuie stato inserito il compensatore anti-windup esteso dal modello interno di AL-F.
zione di un ritardo, comporta l’introduzione di una dinamica ulteriore nel sistema, e
tale dinamica puo essere stabile o instabile. La scelta della posizione in cui introdurre
il ritardo e stata ragionata al fine di non introdurre instabilita nel sistema. Come
si vede in figura 3.7 viene ritardato di un passo di campionamento il segnale della
corrente IF,desiderata prima che a questa venga sottratta la stima della IF,reale. In que-
sto modo viene fatta la differenza di due segnali entrambi ritardati (uno dal ritardo
appena introdotto e discusso, l’altro dal modello dell’AL-F).
Nelle figure 3.4 e 3.8 viene mostrato il comportamento della soluzione anti-windup
di base appena esposta in figura 3.7 e raffrontato con il funzionamento ideale dell’anello
di controllo discusso nel paragrafo 2.2.2. Si nota da subito in figura 3.4 che, seppur per
un errore ridotto, i segnali prodotti dal controllore PID nei due casi non coincidono
perfettamente, in disaccordo con il caso standard del compensatore anti-windup. I
44

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.2 Applicazione della compensazione anti-windup al sistema di controllo di FTU
Figura 3.7: Schema di controllo con inserimento del compensatore anti-windup estesodal modello interno di AL-F e privo di loop algebrici.
motivi dell’esistenza di questo errore sono:
• Il modello lineare ed ideale dell’anello di controllo (figura 2.11) non e stato
ottenuto solamente eliminando l’effetto indesiderato, ossia il blocco funzionale
AL-F, dallo schema simulativo, a differenza da quanto previsto dalla teoria
standard della soluzione anti-windup. E stato infati inserito al posto del blocco
AL-F un ritardo di un passo di campionamento per evitare un loop algebrico.
Questo inserimento ha prodotto una dinamica aggiuntiva nel sistema.
• Nel compensatore anti-windup progettato e stato inserito un ritardo di un passo
di campionamento per evitare sempre un loop algebrico irrisolvibile.
• La natura del blocco funzionale AL-F e fondamentalmente dissimile da quella
45

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.2 Applicazione della compensazione anti-windup al sistema di controllo di FTU
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
tempo [s]
fluss
o m
agne
tico
[Wb]
Sparo numero 20838
Delta Psi modello lineareDelta Psi modello con compensatore anti−windup di base
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−1500
−1000
−500
0
500
1000
1500
2000
tempo [s]
corr
ente
[A]
Sparo numero 20838
Corrente IF,erogata
modello lineare
Corrente IF,erogata
modello con compensatore anti−windup di base
Figura 3.8: Simulazione sparo instabile 20838: a sinistra l’errore ∆Ψ del modellolineare (fig. 2.11) e in quello non lineare compensato (fig. 3.7), a destra la corrente IF
in uscita da AL-F di entrambi i modelli. L’azione del compensatore ha stabilizzato ilmodello del sistema. Vengono infatti riprodotte le forme d’onda stabili dei segnali diuscita del modello lineare.
di una saturazione. Il blocco AL-F contiene all’interno oltre a componenti non
lineari come saturazioni anche componeneti dinamici che introducono ritardi.
Per questi motivi sussiste un errore tra le uscite del controllore nei due modelli, che
si ripercuote anche nei segnali IF e ∆Ψ in figura 3.8. Tuttavia l’ampiezza dell’errore
sul segnale IF,correzione, peraltro appena giustificato, e di ben undici ordini di grandezza
inferiore all’ampiezza dei segnali di corrente, quindi del tutto trascurabile. Cio che
ha maggior valore e osservare che il compensatore anti-windup proposto stabilizza in
simulazione il sistema nello sparo instabile 20838 (vedi figura 3.8), che nella realta e
nel modello non compensato (figura 2.7) ha avuto esito instabile (vedi figura 2.10).
Infatti sia il segnale di errore ∆Ψ, sia l’uscita in corrente IF di AL-F simulati in
presenza del compensatore di base, inseguono le stesse forme d’onda delle simulazioni
del modello lineare.
46

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.2 Applicazione della compensazione anti-windup al sistema di controllo di FTU
Figura 3.9: Progetto di un compensatore anti-windup generale per l’anello di controllodella posizione orizzontale del plasma di FTU.
3.2.2 Progetto di un compensatore anti-windup generale
Nella sua forma piu completa il compensatore anti-windup (vedi [1]), prevede due
segnali di uscita v1 e v2. Il segnale v2 e l’uscita presente nel compensatore di base
precedentemente esposto. Il segnale v1 e invece una combinazione lineare tra il segnale
v2 e il segnale di ingresso della replica del processo. Il segnale v1 si va a sommare alla
stessa IF,desiderato. Quindi, con riferimento alla figura 3.9 si ha:
v1 = K · (∆Ψdesiderato −∆Ψreale) + L · (IF,desiderato − IF,reale)
v2 = ∆Ψdesiderato −∆Ψreale
L’inserimento del segnale v1 e fondamentalmente volto al miglioramento delle pre-
stazioni del sistema e risulta necessario qualora il processo da controllare non sia
47

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.3 Disattivazione del compensatore anti-windup nel regime di stabilita
asintoticamente stabile. Nel caso il fenomeno indesiderato sia una saturazione, esi-
stono condizioni sufficienti a stabilire che K e L mantengano stabile il sistema a
ciclo chiuso (vedi [1]). In ogni caso assegnare valori troppo elevati per K ed L, si-
gnifica reinserire nel sistema nell’anello di controllo segnali proporzionali agli errori
∆Ψdesiderato−∆Ψreale e IF,desiderato−IF,reale con il conseguente rischio di destabilizzare
il sistema. L’introduzione del segnale v1 con varie e successive scelte di K e L non
ha portato in simulazione ad apprezzabili miglioramenti delle prestazioni del sistema.
Inoltre date la criticita del processo e la sua complessita e sconsigliabile intervenire
direttamente sul segnale di controllo del convertitore AL-F (sommando alla corrente
IF,desiderato il segnale v1) dato che i risultati ottenuti per via teorica si basano su un
modello comunque semplificato.
Figura 3.10: Grafico dell’andamento della funzione α(IF,richiesta) in funzione dellacorrente IF,richiesta.
3.3 Disattivazione del compensatore anti-windup
nel regime di stabilita
Nella maggior parte degli esperimenti viene mantenuto l’equilibrio della posizione
orizzontale del plasma. Molto spesso in questi casi la corrente IF e in modulo al di
sopra dei 1200 A e non si verifica il comportamento non lineare di AL-F. Quindi in
questi esperimenti l’apporto del compensatore antiwindup non e necessario. D’altra
48

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.3 Disattivazione del compensatore anti-windup nel regime di stabilita
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−400
−200
0
200
400
600
800
tempo [s]
corr
ente
[A]
Sparo numero 28000
Ingresso compensatore anti−windup di base
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−400
−300
−200
−100
0
100
200
300
400
500
tempo [s]
corr
ente
[A]
Sparo numero 28000
Ingresso compensatore (modello con compensatore con funzione alpha)Ingresso smorzato compensatore (modello con compensatore con funzione alpha)
Figura 3.11: Simulazione sparo stabile 28000: a sinistra l’ingresso del compensatoreIF,desiderato−IF,reale del modello con compensatore di base (fig. 3.7). A destra i segnalidel modello con compensatore con funzione α(IF,richiesta) (fig. 3.15): in blu lo stessoIF,desiderato − IF,reale, e sovrapposto ad esso in rosso α · (IF,desiderato − IF,reale) effettivoingresso del compensatore.
parte il contributo all’anello di controllo di FTU del compensatore proposto, anche
nel regime di stabilita di AL-F, e sempre non nullo a differenza del caso standard del
compensatore antiwindup (vedi figura 3.11).
Nel caso standard l’effetto indesiderato e una saturazione la quale, entro i regimi
di saturazione, restituisce istantaneamente in uscita l’ingresso immutato. All’interno
dei regimi di saturazione l’ingresso del compensatore e identicamente nullo, in quanto
e la differenza tra ingresso e uscita della saturazione che in questo caso risulta traspa-
rente, e per linearita e nulla anche l’uscita dello stesso. Nel caso in esame l’ingresso al
compensatore non e mai nullo poiche la caratteristica ingresso-uscita dell’effetto in-
desiderato, in questo caso la non linearita di AL-F, non e l’identita in alcun regime di
funzionamento. Essa e infatti caratterizzata sia da non linearita come saturazioni in-
terne ad AL-F, sia da dinamiche interne dovute ai componenti reali da cui e composto
il convertitore. Esiste quindi la necessita di estendere ulteriormente il compensatore
49

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.3 Disattivazione del compensatore anti-windup nel regime di stabilita
Figura 3.12: Estensione del compensatore anti-windup con il blocco funzionale α chericeve in gresso la corrente IF,desiderata e la cui uscita moltiplica l’ingresso della replicadel processo Modello PLASMA.
affinche non agisca negli alti regimi di funzionamento di AL-F.
Nel caso standard, il compensatore anti-windup entrando nel regime di linearita
genera un segnale di uscita nullo poiche il suo ingresso e nullo. Questo e garantito
dalla stabilita asintotica del compensatore stesso. Per annullare nel caso in esame il
contributo del compensatore nel regime di stabilita si e deciso di smorzare anche in
questo caso l’ingresso dello stesso invece che intervenire direttamente sulla sua uscita.
Per effettuare questo smorzamento e stata introdotta una funzione α(IF,richiesta) che
estende il compensatore anti-windup. La funzione α(IF,richiesta) dipende dall’ampiezza
della corrente IF,richiesta richiesta al converitore AL-F. Il valore di α e unitario a bassi
50

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.3 Disattivazione del compensatore anti-windup nel regime di stabilita
Figura 3.13: Evidenziazione del loop algebrico presente nello schema di controllo incui e stato inserito il compensatore anti-windup con funzione α(IF,richiesta).
regimi di ampiezza di IF fino ad un valore IF,min; da IF,min decresce a rampa fino ad
annullarsi in IF,max; rimane nullo per valori maggiori di IF,max (vedi figura 3.10).
Il valore di uscita del blocco α che implementa l’omonima funzione viene moltipli-
cato per l’ingresso della copia del processo smorzandolo nel regime di stabilita (vedi
figura 3.11).
In questo schema e presente ancora una volta un loop algebrico non risolvibile. Il
loop e causato dallo stesso inserimento del blocco che valuta la funzione α(IF,richiesta).
Essendo un blocco istantaneo, causa il loop evidenziato in figura 3.13.
Per oviare a questo inconveniente e stato scelto di valutare la funzione α(IF,richiesta)
sulla base del segnale della corrente IF richiesta ritardata di un campione. Questo ac-
51

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.3 Disattivazione del compensatore anti-windup nel regime di stabilita
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.60
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
tempo [s]
Sparo numero 28000
Funzione alpha
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−1000
0
1000
2000
3000
4000
5000
6000
tempo [s]
corr
ente
[A]
Sparo numero 28000
Corrente IF,erogata
modello originale senza compensatore
Corrente IF,erogata
modello con compensatore con funzione alpha
Figura 3.14: Simulazione sparo stabile 28000: A sinistra l’andamento del segnale diattivazione del compensatore α(IF,richiesta) nel tempo, a destra la corrente IF,erogata
simulata nello stesso modello con compensatore con funzione α(IF,richiesta) (figura3.15). Si vede che l’intervento del compensatore avviene solo nel regime transitorio incui avviene l’attraversamento da parte della corrente IF del regime critico.
corgimento, il cui schema complessivo e in figura 3.15, non genera dinamiche instabili
anche perche il segnale di ingresso del blocco α e lo stesso segnale che viene sottratto
alla stima di IF erogata.
In figura 3.14 a destra viene riportato il raffronto tra la corrente IF in uscita da
AL-F del modello non compensato (figura 2.7) e quella del modello con inserimento del
compensatore anti-windup esteso dalla funzione α(IF,richiesta) (figura 3.15) per lo sparo
stabile 28000, in cui l’apporto del compensatore antiwindup non e necessario. Si vede
che l’intervento del compensatore (vedi figura 3.14 a sinistra) avviene solo nel regime
transitorio in cui avviene l’attraversamento da parte della corrente IF del regime
critico. Questa fatto e auspicabile in quanto nella fase iniziale degli esperimenti reali si
presenta spesso un’oscillazione transitoria della posizione orizzontale del plasma (vedi
figura 2.1) e quindi sara di aiuto alla stabilizzazione dell’errore ∆Ψ il contributo del
compensatore in questa fase. Per quanto riguarda invece in generale tutta l’evoluzione
52

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.3 Disattivazione del compensatore anti-windup nel regime di stabilita
Figura 3.15: Schema di controllo con inserimento del compensatore anti-windup estesodal modello interno di AL-F, dalla funzione α(IF,richiesta) e privo di loop algebrici. Ilcompensatore rappresentato in figura e la soluzione definitiva proposta in questa tesiper l’estensione della legge di controllo attuale di FTU.
dell’esperimento e stato necessario operare lo smorzamento di tale contributo mediante
l’inserimento della funzione α(IF,richiesta) per rispondere alla specifica di trasparenza
del compensatore nel regime di stabilita.
Lo schema di figura 3.15 riporta la soluzione definitiva elaborata in questa tesi per
oviare all’instabilita del sistema di controllo della posizione orizzontale del plasma di
FTU. Si puo dire che la soluzione elaborata rispetti le specifiche elencata all’inizio del
presente Capitolo:
• Di fatto non elimina alcuna componente preesistente del sistema di controllo di
53

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.3 Disattivazione del compensatore anti-windup nel regime di stabilita
FTU ma ne estende solo la legge di controllo al fine di gestire anche le dinamiche
non lineari di AL-F.
• Compensa grazie all’applicazione della soluzione anti-windup le non linearita di
AL-F e riproduce in simulazione il funzionamento lineare ed ideale dell’anello
di controllo per gli spari soggetti ad instabilita.
• Il compensatore introdotto e trasparente e non da alcun contributo ulteriore al
controllo del plasma durante gli spari stabili grazie all’estensione del compensa-
tore anti-windup apportata dalla funzione α(IF,richiesta).
Per la funzione α(IF,richiesta) e sono stati scelti per IF,min e IF,max rispettivamente
valori pari a 1500 A e 2000 A per quanto riguarda le simulazioni. Questa scelta e do-
vuta al fatto che l’insorgere dell’instabilita nel modello simulativo si presenta quando
IF in modulo e compresa tra 0 A e 1200 A. Anche nella realta il convertitore AL-F si
comporta in maniera non lineare, e quindi causa l’instabilita della posizione orizzonta-
le del plasma, qualora la richiesta di corrente che gli viene fatta abbia modulo minore
o uguale a 1200 A. Pertanto anche nell’esperimento reale sara opportuno scegliere per
IF,min e IF,max valori simili a quelli scelti in simulazione in modo da attivare il com-
pensatore progettato solo quando AL-F ha un comportamento non lineare. Dei valori
accettabili potrebbero essere quindi IF,min = 1500 A e IF,max = 2000 A. Il lavoro di
miglioramento del modello simulativo svolto nella Tesi e stato importante in questo
senso. Infatti in [5] la soglia di instabilita del modello simulativo era diversa da quella
reale. Esiste un parametro Iw all’interno del modello simulativo del convertitore AL-F
sviluppato in [4] che rappresenta la corrente di circolazione che scorre nei ponti del
convertitore (viene impostato costante al valore medio della corrente di circolazione
nel tempo). Variando il valore di questo parametro si riesce a spostare la soglia del
54

Cap. 3 Soluzione per la stabilizzazione della posizione orizzontale del plasma di FTU
3.3 Disattivazione del compensatore anti-windup nel regime di stabilita
regime di instabilita del modello. Nella presente Tesi questo valore e stato riportato al
valore di 1200 A, come originariamente scelto in [4], permettendo nel contempo sia di
far coincidere la soglia del regime di instabilita tra modello simulativo e esperimenti
reali, sia di ottenere delle simulazioni piu accurate e affidabili degli esperimenti di
FTU.
55

Capitolo 4
Implementazione della soluzione
progettata
Vengono descritte in questo Capitolo la discretizzazione e la tradu-zione in linguaggio C del compensatore anti-windup progettato nelCapitolo 3. Vengono poi mostrate le modifiche necessarie da effet-tuare sul codice attuale del sistema di controllo di FTU per inserireil compensatore anti-windup nell’anello di controllo della posizioneorizzontale del plasma.
Il sistema di controllo del plasma dell’esperimento FTU e implementato su un
personal computer che ospita Linux RTAI, un sistema operativo real-time ed open
source. Durante l’attivita sperimentale viene eseguita su questo computer in tempo
reale (ossia ciclicamente ad ogni passo di capionamento TS = 0.5 ms) un’applicazione
che, a partire dalle misure magnetiche che pervengono dall’impianto, applica la legge
di controllo stabilendo, tra l’altro, le correnti richieste ad ogni avvolgimento elettrico.
L’applicazione responsabile della legge di controllo e stata implementata in linguaggio
C e poi compilata sullo stesso personal computer. Ogni estensione o semplice modifica
della legge di controllo si traduce in un’estensione o modifica del codice sorgente con
il quale e codificata la legge di controllo.
Si e reso necessario quindi tradurre in linguaggio C il compensatore progettato nel
Capitolo 3 per questi motivi:
56

Cap. 4 Implementazione della soluzione progettata
4.1 Discretizzazione del compensatore anti-windup
• Testare in simulazione la bonta della traduzione da modello simulativo a codice
C dell’estensione proposta per la legge di controllo ancora prima di applicarla
realmente all’esperimento FTU.
• Disporre alla conclusione del lavoro di un codice gia pronto ad essere inserito
all’interno di quello preesistente.
4.1 Discretizzazione del compensatore anti-windup
Essendo il computer una macchina discreta c’e stata la necessita di discretizzare i
componenti del compensatore caratterizzati da una dinamica a tempo continuo prima
di implementarli nel calcolatore. In particolare, con riferimento alla figura 3.15, il
compensatore progettato contiene due blocchi funzionali con dinamica a tempo con-
tinuo, ossia Modello AL-F e Modello PLASMA. Quindi ancora prima di tradurre in
linguaggio C il compensatore si e proceduto all’approssimazione a tempo discreto dei
due componenti. La discretizzazione e stata svolta in due modi differenti:
• Approssimazione di Eulero o delle differenze all’indietro o dei parallelogrammi.
• Approssimazione di Tustin o dei trapezi.
Entrambe sono delle approssimazioni del calcolo dell’integrale definito utili per la
risoluzione approssimata delle equazioni differenziali che caratterizzano le dinamiche
a tempo continuo. Il metodo di Eulero, rappresentata in figura 4.1 a sinistra, si
basa sull’approssimazione in parallelogrammi dell’area dell’integrale. Esso permette
di stabilire una corrispondenza tra le funzioni di traferimento a tempo continuo e
tempo discreto. Di seguito viene mostrata la corrispondenza tra le variabili complesse
del dominio di Laplace e del dominio Z, rispettivamente per le funzioni di traferimento
a tempo continuo e discreto.
57

Cap. 4 Implementazione della soluzione progettata
4.1 Discretizzazione del compensatore anti-windup
Figura 4.1: Metodi di approssimazione dell’integrale: a sinistra il metodo di Eulero,a destra quello di Tustin
y(t) = u(t) ⇒
kTS∫
(k−1)TS
y(t) dt =
kTS∫
(k−1)TS
u(t) dt ⇒
yk − yk−1 ≈ TS · uk ⇒ yk ≈ TS · uk + yk−1
Y (z)
U(z)=
z · TS
z − 1≈
Y (s)
U(s)=
1
s
s =z − 1
z · TS
Viene di seguito mostrata la discretizzazione del blocco funzionale Modello PLA-
SMA del compensatore anti-windup progettato. La funzione di trasferimento del
blocco funzionale viene discretizzata secondo l’approssimazione di Eulero e viene poi
da essa ricavata una rappresentazione nello spazio di stato (nel dominio del tempo
discreto) della stessa, utile per l’implementazione effettiva in linguaggio C.
58

Cap. 4 Implementazione della soluzione progettata
4.1 Discretizzazione del compensatore anti-windup
P (s) =k · s
τ · s + 1=−3.4375 · 10−7 · s
0.008 · s + 1
P (z) = P (s)|s= z−1
Ts·z
=k · (z − 1)
(TS + τ) · z − τ= C (zI − A)−1
B + D
P (z) =k
TS + τ·
z − 1
z − A, A =
τ
TS + τ
P (z) =k
TS + τ·
(
1 +A− 1
z − A
)
=k · (A− 1)
TS + τ· (z − A)−1 +
k
TS + τ
= −k · TS
(TS + τ)2 ·
(
z −τ
TS + τ
)
−1
+k
TS + τ
A =τ
TS + τ= 0.941 B = 1.0
C = −k · TS
(TS + τ)2 = 2.379 · 10−6 D =k
TS + τ= −4.044 · 10−5
xk+1 = Axk + B uk
yk = C xk + D uk
Nella rappresentazione nello spazio di stato ricavata per il blocco funzionale Mo-
dello PLASMA xk, yk, yk sono rispettivamente lo stato interno l’ingresso e l’uscita
al tempo k · Ts dello stesso blocco. E stato quindi discretizzato il blocco funzionale
Modello AL-F in maniera analoga a quanto fatto per il precedente. Il blocco ritardo
unitario 1z
non ha necessitato di una discretizzazione in quanto a tempo discreto gia
di per se.
59

Cap. 4 Implementazione della soluzione progettata
4.2 Implemementazione in linguaggio C del compensatore anti-windup.
Il metodo di approsimazione di Tustin viene rappresentato in figura 4.1 a destra.
Esso si basa sulla piu accurata approsimazione mediante trapezi dell’integrale. Di se-
guito viene riportata la conversione secondo l’approsimazione di Tustin della funzione
di trasferimento del blocco Modello PLASMA.
yk − yk−1 ≈ TS ·xk−1 + xk
2⇒ s =
2
TS
·z − 1
z + 1
P (s) =k · s
τ · s + 1⇒ P (z) =
2 k · (z − 1)
(TS + 2τ) · z + TS − 2τ
In figura 4.2 a destra si puo vedere come tra il due metodi di approssimazione
non ci sia molta differenza per quanto riguarda la simulazione della corrente IF,erogata.
L’errore tra i segnali simulati ottenuti con compensatore discretizzato nei due rispet-
tivi metodi e quello simulato con compensatore sviluppato in ambiente Simulink e
paragonabile sia per ordine di grandezza che per forma d’onda. Pertanto non essen-
doci rilevanti differenze di comportamento del modello simulativo tra i due metodi la
scelta e ricaduta sull’approssimazione di Eulero.
4.2 Implemementazione in linguaggio C del com-
pensatore anti-windup.
Discretizzati i blocchi funzionali si e proceduto all’implementazione in linguaggio C
degli stessi. Il codice delle funzioni C sviluppate e riportato in Appendice.
Per poter testare in simulazione ogni singolo blocco funzionale sono state imple-
mentate una distinta funzione C per ognuno di essi. Simulink, l’ambiente simulativo
utilizzato, permette lo sviluppo di blocchi funzionali, detti S-function, il cui funziona-
60

Cap. 4 Implementazione della soluzione progettata
4.2 Implemementazione in linguaggio C del compensatore anti-windup.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−40
−20
0
20
40
60
80
100
tempo [s]
corr
ente
[A]
Sparo numero 20838
Errore IF,erogata
con compensatore Simulink e discretizzato secondo Eulero
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−40
−20
0
20
40
60
80
tempo [s]
corr
ente
[A]
Sparo numero 20838
Errore IF,erogata
con compensatore Simulink e discretizzato secondo Tustin
Figura 4.2: Simulazione sparo instabile 20838. Confronto tra le uscite in correntedel sistema per i modelli con compensatore sviluppato in Simulink, e discretizzatosecondo Eulero e secondo Tustin.
mento sia definito in linguaggio C. Quindi, con riferimento alla figura 3.15, sono state
sviluppate quattro S-function che hanno tradotto i blocchi: Modello AL-F, Modello
PLASMA, la funzione α(IF,richiesta), ritardo unitario 1z. A parte il parametro α, gli
altri tre blocchi funzionali sono caratterizzati da dinamica interna (ossia non sono
blocchi istantanei). La dinamica interna ai blocchi richiede che le funzioni C che li
descrivono posseggano delle variabili interne che siano in grado di mantenere il loro
valore durante le successive chiamate della funzione ad ogni passo di campionamento.
Queste variabili dovranno memorizzare il valore dello stato del blocco funzionale. Il
linguaggio C mette a disposizione le variabili static che assolvono tale compito.
La soluzione ideale sarebbe stata testare in simulazione lo stesso codice del com-
pensatore che dovra essere inserito nella legge di controllo attuale. Le funzioni che
andranno inserite nel sistema di controllo utilizzano variabili static previste dal codice
C standard. Purtroppo l’ambiente Simulink prevede, per un corretto e sincronizzato
funzionamento della dinamica interna delle S-function, la definizione di variabili di
stato riservate. Il loro funzionamento e del tutto simile a quello che si ottiene defi-
61

Cap. 4 Implementazione della soluzione progettata
4.2 Implemementazione in linguaggio C del compensatore anti-windup.
nendo variabili di tipo static. Utilizzando le variabili di stato static all’interno delle
S-function, Simulink sebbene gestisca correttamente la loro memorizzazione, simula
come blocchi istantanei i blocchi che le contengono.
Nonostante cio il codice della simulazione e quello pronto per l’inserimento nella
legge di controllo differiscono solo per la differente definizione delle variabili di stato.
La corrispondenza tra i due codici e stata provata a ciclo aperto, dove la gestione
istantanea che Simulink fa delle S-function che utilizzano variabili static non influisce
sul risultato delle simulazioni. Il risultato ottenuto e stato il perfetto sovrapporsi delle
forme d’onda di uscita dei compensatori sottoposti allo stesso ingresso.
Sviluppate le singole funzioni esse sono state accorpate all’interno di una singola
funzione C, che le richiama singolarmente e che svolge il funzionamento complessivo
del compensatore anti-windup.
La struttura della suddetta funzione C che sintetizza l’intero compensatore anti-
windup, chiamata Compensatore(), e illustrata nello pseudo-codice seguente. All’in-
terno del corpo della funzione vi sono i richiami alle sotto-funzioni che implementano
a loro volta i sotto-blocchi funzionali del compensatore.
correzione ∆Ψ = Compensatore(IF,richiesta){ stima IF,erogata ← modello ALF (IF,richiesta)
IF,richiesta ritardata ← delay(IF,richiesta)valore α ← α(IF,richiesta ritardata)ingresso plasma ← valore α · (IF,richiesta ritardata− stima IF,erogata)return ← modello PLASMA (ingresso plasma)
}
62

Cap. 4 Implementazione della soluzione progettata
4.3 Integrazione del compensatore nel sistema di controllo
4.3 Integrazione del compensatore nel sistema di
controllo
L’applicazione che implementa l’attuale legge di controllo di FTU si chiama main ed
il suo codice sorgente e contenuto all’interno del file vme main.c. Essa viene eseguita
in real-time e rimane permanentemente in esecuzione sul computer che la ospita.
L’applicazione contiene nella sua sezione centrale uno switch case che ad ogni passo
di campionamento viene ripetuto facendo entrare l’applicazione ad ogni passo in un
particolare stato. Lo stato dell’applicazione main evolve cronologicamente secondo la
successione descritta in tabella 4.1
Stato TempoSTATE WAIT fino a prima dell’inizio del countdown.STATE A −2.0 s → −1.5 s
STATE B −1.5 s → −1.4 s
STATE C −1.4 s → −1.0 s
STATE D −1.0 s → −0.1 s
STATE E −0.01 s → −0.001 s
STATE F −0.001 s → +3.0 s
STATE EXIT da +3.0 s fino al segnale di fine sequenza.
Tabella 4.1: Successione degli stati in cui entra l’applicazione main che esegue la leggedi controllo durante uno sparo di FTU.
Durante lo stato STATE WAIT il sistema rimane in attesa, non scorre alcuna
corrente lungo gli avvolgimenti elettrici attorno alla camera da vuoto di FTU, e la
legge di controllo non viene eseguita. Quando viene dato inizio al countdown pri-
ma dello sparo vengono effettuati in modo distributo su tutti l’impianto una serie di
controlli di sicurezza che in caso di esito negativo possono far abortire lo sparo. Su-
perati i controlli di sicurezza l’applicazione esce dallo STATE WAIT . Tra gli stati
STATE A e STATE E il sistema di controllo comincia ad azionare l’avvolgimento
63

Cap. 4 Implementazione della soluzione progettata
4.3 Integrazione del compensatore nel sistema di controllo
elettrico che alimenta il campo toroidale, e il trasformatore centrale, ma la legge di
controllo eseguita all’interno di questi stati non aggiunge alcun segnale di correzione
ai preprogrammati poiche i guadagni del controllore PID sono ancora nulli. Nello
STATE F vi e l’esecuzione dello sparo: vengono azionati tutti gli avvolgimenti elet-
trici e vengono impostati i guadagni del controllore PID ai valori prefissati attivando
l’anello di controllo in controreazione. In questo stato verra inserita la funzione che
implementa il compensatore anti-windup progettato in questa tesi. Di fatto solo in
questo stato l’anello di controllo della posizione orizzontale e attivo, viene richiesta
una corrente IF diversa da zero e si necessita dell’inserimento dell’azione di correzione
del compensatore anti-windup.
Nello STATE F viene eseguita nell’applicazione main la funzione mod3 fb() il
cui sorgente e contenuto nel file vme mod3 fb.c. Questa funzione si occupa di appli-
care la legge di controllo in controreazione per gli avvolgimenti poloidali F, V, H, T.
Per ognuno di questi avvolgimenti viene applicata la legge di controllo proporzionale-
integrativa-derivativa con i guadagni per il controllore PID specifici per ogni avvolgi-
mento. La legge di controllo PID e implementata dalla funzione pid backw() contenuta
nel file vme lib fb.c. In particolare per quanto riguarda l’avvolgimento F, la funzione
pid backw() prende in ingresso il valore istantaneo di ∆Ψ dei guadagni proporzionale,
integrativo e derivativo e restituisce il valore del segnale IF,correzione. La chiamata
della funzione Compensatore() andando a correggere il segnale ∆Ψ verra inserita
quindi immediatamente prima della chiamata di pid backw() all’interno del corpo
della funzione mod3 fb(). In figura 4.3 viene esemplificato l’intervento che dovra es-
sere apportato al codice attuale, oltre all’inclusione dei file contenenti le definizioni
delle funzioni che compongono il compensatore anti-windup progettato.
64

Cap. 4 Implementazione della soluzione progettata
4.3 Integrazione del compensatore nel sistema di controllo
Figura 4.3: Estensione del codice dell’attuale legge di controllo di FTU. In nero ilcodice attuale e in rosso le modifiche da apportare per l’inserimento del compensatoreanti-windup.
65

Capitolo 5
Risultati simulativi
Questo Capitolo e completamente dedicato all’esposizione deirisultati simulativi ottenuti con l’applicazione delle soluzioni dicompensazione progettate ed esposte nei Capitoli 3 e 4.
5.1 Risultati simulativi su uno sparo instabile
Lo sparo 21700 e stato fortemente soggetto ad instabilita. Questo lo si puo desumere
chiaramente osservando l’andamento della corrente IF erogata in figura 5.1 a sinistra
e l’errore sul posizionamento orizzontale ∆Ψ a destra. Il preprogrammato di corrente
non viene seguito dalla corrente IF a causa dell’azione del controllore PID il quale
genera un segnale di correzione oscillante. Questo perche la dinamica non lineare di
AL-F, che si manifesta quando l’ampiezza di IF e minore di 1200 A come in questo
caso, non viene gestita correttamente dal controllore PID.
In figura 5.2 vengono riportati i risultati ottenuti dal modello simulativo di base
di figura 2.7. L’instabilita dei segnali viene riprodotta anche se con differenti forme
d’onda dal modello simulativo di base. E importante notare come nel modello simu-
lativo entrino in oscillazione i segnali in corrispondenza della permanenza da parte di
IF dell’intervallo -1200 A, 1200A.
In figura 5.3 vengono riportati i risultati ottenuti con il modello in cui e stato ap-
66

Cap. 5 Risultati simulativi 5.1 Risultati simulativi su uno sparo instabile
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−2000
−1500
−1000
−500
0
500
1000
1500
2000
2500
3000
tempo [s]
corr
ente
[A]
Sparo numero 21700
preprogrammato IF
IF erogata
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−0.06
−0.05
−0.04
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
tempo [s]
Flu
sso
mag
netic
o [W
b]
Sparo numero 21700
Delta Psi
Figura 5.1: Sparo instabile 21700 misure reali: corrente IF,erogata e preprogrammatoa sinistra, errore sul posizionamento orizzontale ∆Ψ.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−2000
−1500
−1000
−500
0
500
1000
1500
2000
2500
3000
tempo [s]
corr
ente
[A]
Sparo numero 21700
Preprgrammato corrente IF
Corrente IF,erogata
Corrente IF,erogata
simulata con modello originale
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
tempo [s]
fluss
o m
agne
tico
[Wb]
Sparo numero 21700
Delta Psi realeDelta Psi simulata con modello originale
Figura 5.2: Simulazione sparo instabile 21700: Confronto tra i segnali IF e ∆Ψ realie simulati dal modello simulativo di base di figura 2.7.
67

Cap. 5 Risultati simulativi 5.1 Risultati simulativi su uno sparo instabile
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−1500
−1000
−500
0
500
1000
1500
2000
tempo [s]
corr
ente
[A]
Sparo numero 21700
Corrente IF,erogata
modello lineare
Corrente IF,erogata
modello con compensatore con funzione alpha
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
tempo [s]
fluss
o m
agne
tico
[Wb]
Sparo numero 21700
Delta Psi modello lineareDelta Psi modello con compensatore con funzione alpha
Figura 5.3: Simulazione sparo instabile 21700: Confronto tra i segnali IF e ∆Ψ simu-lati nel modello lineare e in quello con compensatore anti-windup esteso dalla funzioneα(IF,richiesta).
plicato il compensatore anti-windup esteso con funzione α(IF,richiesta) di figura 3.15.
L’andamento dei segnali IF e ∆Ψ viene confrontato con quello ideale ottenuto median-
te il modello lineare di figura 2.11 in cui l’instabilita non si presenta essendo assente
la non linearita di AL-F. L’azione del compensatore ha stabilizzato il modello. La
sovraelongazione iniziale per la quale i segnali del modello non lineare compensato
si discostano da quelli del modello lineare e giustificata dal fatto che il compensato-
re adottato non e un compensatore anti-windup standard ma e stato ampliato dalla
funzione α(IF,richiesta). La funzione α(IF,richiesta) (figura 3.10) e stata impostata in
questa simulazione scegliendo IF,min e IF,max rispettivamente pari a 1500 A e 2000 A
(figura 5.4 a sinistra). La scelta e coerente con l’insorgere dell’instabilita nel modello
che si presenta quando IF e in modulo minore a 1200 A. Anche nella realta l’esperi-
mento e soggetto ad instabilita qualora la corrente IF abbia modulo minore o uguale
a 1200 A. Pertanto anche nella realta sara opportuno scegliere dei valori simili per
IF,min e IF,max a quelli scelti in simulazione in modo da intervenire con l’azione di
compensazione correttamente.
68

Cap. 5 Risultati simulativi 5.1 Risultati simulativi su uno sparo instabile
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−2000
−1500
−1000
−500
0
500
1000
1500
2000
tempo [s]
corr
ente
[A]
Sparo numero 21700
Corrente IF,richiesta
modello anti−windup esteso con funzione alpha
IF min
IF max
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.60
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
tempo [s]
Sparo numero 21700
Funzione alpha
Figura 5.4: Simulazione sparo instabile 21700: Corrente IF,richiesta e funzioneα(IF,richiesta) simulate nel modello compensato.
In figura 5.4 a destra viene mostrato l’andamento della funzione α(IF,richiesta) nel
tempo durante la simulazione dello sparo instabile 21700. Si vede essendo la corrente
la corrente IF,richiesta compresa tra -1200 A e 1200 A durante tutta la simulazione
il valore assunto dalla funzione α(IF,richiesta) e pari a uno costantemente, in quanto
AL-F sta lavorando sempre nel regime di non linearita nel nel quale si necessita l’in-
tervento costante del compensatore. La funzione α(IF,richiesta) funge letteralmente da
interruttore per il compensatore anti-windup. Tuttavia la maniera con cui viene atti-
vato e disattivato il funzionamento del compensatore anti-windup e stata progettata
in modo da non introdurre comportamenti discontinui. Infatti come si vede (per lo
sparo stabile) in figura 5.10 il passaggio da attivazione e disattivazione dell’azione del
compensatore anti-windup e graduale nel tempo.
Nella figura 5.5 si vedono l’ingresso e l’uscita del compensatore anti-windup. A si-
nistra vediamo l’ingresso prima e dopo la moltiplicazione con la funzione α(IF,richiesta).
Si vede come, a seguito della moltiplicazione per α che rimane costantemente a valore
unitario, l’ingresso del compensatore non venga smorzato in questo sparo poiche il
69

Cap. 5 Risultati simulativi 5.1 Risultati simulativi su uno sparo instabile
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−800
−600
−400
−200
0
200
400
600
800
1000
1200
tempo [s]
corr
ente
[A]
Sparo numero 21700
Ingresso compensatore (modello con compensatore con funzione alpha)Ingresso smorzato compensatore (modello con compensatore con funzione alpha)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−0.015
−0.01
−0.005
0
0.005
0.01
0.015
0.02
0.025
tempo [s]
fluss
o m
agne
tico
[Wb]
Sparo numero 21700
Uscita compensatore con funzione alpha
Figura 5.5: Simulazione sparo instabile 21700: Segnali di ingresso e di uscita delcompensatore anti-windup.
modello di AL-F si comporta costantemente in maniera non lineare ed e quindi ne-
cessaria l’azione di compensazione per tutta la durata della simulazione. Nella stessa
figura 5.5 a destra si vede l’uscita del compensatore. Nonostante questo segnale di cor-
rezione abbia un ampiezza ridotta e sia nullo per buona parte dell’esperimento, esso e
capace di correggere in maniera efficace l’azione del controllore PID. Dopo i transitori
iniziali, in cui vi e contributo del compensatore poiche la corrente IF partendo da zero
si trova all’interno del regime critico, e dopo la parte centrale dell’esperimento in cui il
compensatore e quasi del tutto disattivato poiche a regime la corrente richiesta ugua-
glia quella erogata da AL-F, si vede come al tempo 1.5 s l’uscita del compensatore
reagisca immediatamente alla nuova variazione della corrente IF , sempre all’interno
del regime critico, evitando le ampie oscillazione di corrente che si presentano nel
sistema non compensato.
Tutte le simulazioni sono state eseguite a passo di integrazione variabile (adatto
a simulare precisamente le dinamiche tempo-continue), e per quanto riguarda i mo-
delli contenenti blocchi funzionali discretizzati, essi isolatamente sono stati simulati
con passo di integrazione costante e pari a quello reale del sistema di controllo di
70

Cap. 5 Risultati simulativi 5.1 Risultati simulativi su uno sparo instabile
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−50
−40
−30
−20
−10
0
10
20
30
40
50
tempo [s]
corr
ente
[A]
Sparo numero 21700
Errore IF,erogata
con compensatore Simulink e discretizzato secondo Eulero
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−6
−4
−2
0
2
4
6x 10
−4
tempo [s]
fluss
o m
agne
tico
[Wb]
Sparo numero 21700
Errore Delta Psi compensatore Simulink e in linguaggio C
Figura 5.6: Simulazione sparo instabile 21700: Errore tra i segnali IF e ∆Ψ delle simu-lazioni con compensatore Simulink e con compensatore discretizzato ed implementatoin linguaggio C.
FTU (0.5 ms), mentre il resto del modello a tempo-continuo evolveva parallelamente
con un passo di integrazione variabile. Anche nell’esperimento reale la situazione e
analoga in quanto il processo reale ovvero il plasma evolve a tempo continuo mentre
la legge di controllo implementata su un computer ha una dinamica tempo-discreta.
Per tanto le simulazioni che meglio possono prevedere l’impatto della compensazione
anti-windup introdotta nella legge di controllo attuale di FTU sono proprio quelle
con il compensatore discretizzato e tradotto in linguaggio C che vengono di seguito
commentate.
In figura 5.6 si vede l’errore tra i segnali IF,erogata e ∆Ψ simulati nei modelli con
compensatore progettato in ambiente Simulink e quello discretizzato e tradotto in lin-
guaggio C. La diversa dinamica del compensatore anti-windup discretizzato rispetto
a quella che caratterizza il compensatore Simulink ha fatto in modo che le correnti
IF,erogata e i segnali di errore magnetico di posizione ∆Ψ simulati nei differenti mo-
delli abbiano avuto un evoluzione non identica. D’altra parte come si vede l’errore
commesso dal modello con compensatore tradotto in linguaggio C rispetto a quello
71

Cap. 5 Risultati simulativi 5.2 Risultati simulativi su uno sparo stabile
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−2000
−1500
−1000
−500
0
500
1000
1500
2000
tempo [s]
corr
ente
[A]
Sparo numero 21700
Corrente IF richiesta modello con funzione alpha in codice C
IF min
IF max
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
tempo [s]
fluss
o m
agne
tico
[Wb]
Sparo numero 21700
Delta Psi compensatore in linguaggio C
Figura 5.7: Simulazione sparo instabile 21700: A sinistra corrente IF,richiesta simulatanel modello con compensatore discretizzato ed implementato in linguaggio C, a destraerrore ∆Ψ della stessa simulazione.
originale e sia per la corrente IF,erogata che per l’errore ∆Ψ di due ordini di grandezza
inferiore agli stessi segnali.
In figura 5.7 vengono mostrati i segnali IF,richiesta e ∆Ψ per i modelli con com-
pensatore tradotto in linguaggio C. Come si poteva capire anche dall’entita ridotta
dell’errore di questi segnali rispetto agli stessi simulati nel modello con compensatore
Simulink, il comportamento del sistema non e variato sensibilimente a seguito della
discretizzazione del compensatore.
5.2 Risultati simulativi su uno sparo stabile
Se in uno sparo instabile il compito del compensatore anti-windup e quello di sta-
bilizzare il funzionamento del sistema ed in particolare di guidare correttamente il
controllore PID, in uno sparo stabile il compito del compensatore e quello di risultare
trasparente alla attuale legge di controllo e intervenire quanto meno possibile nella
determinazione delle correnti richieste agli attuatori. Lo sparo 20301 ha avuto esi-
sto positivo. Infatti come si nota in di figura 5.8 l’errore di posizionamento ∆Ψ e
72

Cap. 5 Risultati simulativi 5.2 Risultati simulativi su uno sparo stabile
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−1000
0
1000
2000
3000
4000
5000
6000
7000
tempo [s]
corr
ente
[A]
Sparo numero 20301
Preprgrammato corrente IF
Corrente IF,erogata
Corrente IF,erogata
simulata con modello originale
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
tempo [s]
fluss
o m
agne
tico
[Wb]
Sparo numero 20301
Delta Psi realeDelta Psi simulata con modello originale
Figura 5.8: Simulazione sparo stabile 20301: Confronto tra i segnali IF e ∆Ψ reali esimulati dal modello simulativo di base di figura 2.7.
stato minimizzato e la corrente IF non ha avuto andamenti oscillatori grazie al fatto
di aver lavorato ad alti regimi nei quali il convertitore AL-F non ha comportamenti
discontinui.
Il modello simulativo di base senza compensatore anti-windup di figura 2.7 ripro-
duce il comportamento del sistema reale a meno di un offset sul valore di regime della
corrente IF,erogata come si puo vedere in figura 5.8. I risultati del modello di base
sono confrontati in figura 5.9 con quelli ottenuti con il modello simulativo di figura
3.15 in cui e stato applicato il compensatore compensatore anti-windup esteso con la
funzione α(IF,richiesta). I segnali IF,erogata e ∆Ψ non vengono alterati dall’inserimento
del compensatore che dimostra quindi di aver con successo eliminato il suo contributo
nell’anello di controllo grazie all’azione della funzione α(IF,richiesta).
In figura 5.10 a sinistra si vede come di fatto in questo esperimento la corrente
IF,richiesta sia, a parte nel transitorio iniziale, sempre al di sopra dei valori IF,min
e IF,max che caratterizzano la dipendenza della funzione α(IF,richiesta) dalla stessa
corrente. Ne consegue che negli stessi tratti in cui IF,richiesta a al di sopra dei regimi
critici il valore assunto dalla funzione α(IF,richiesta) sia corrispondentemente nullo come
73
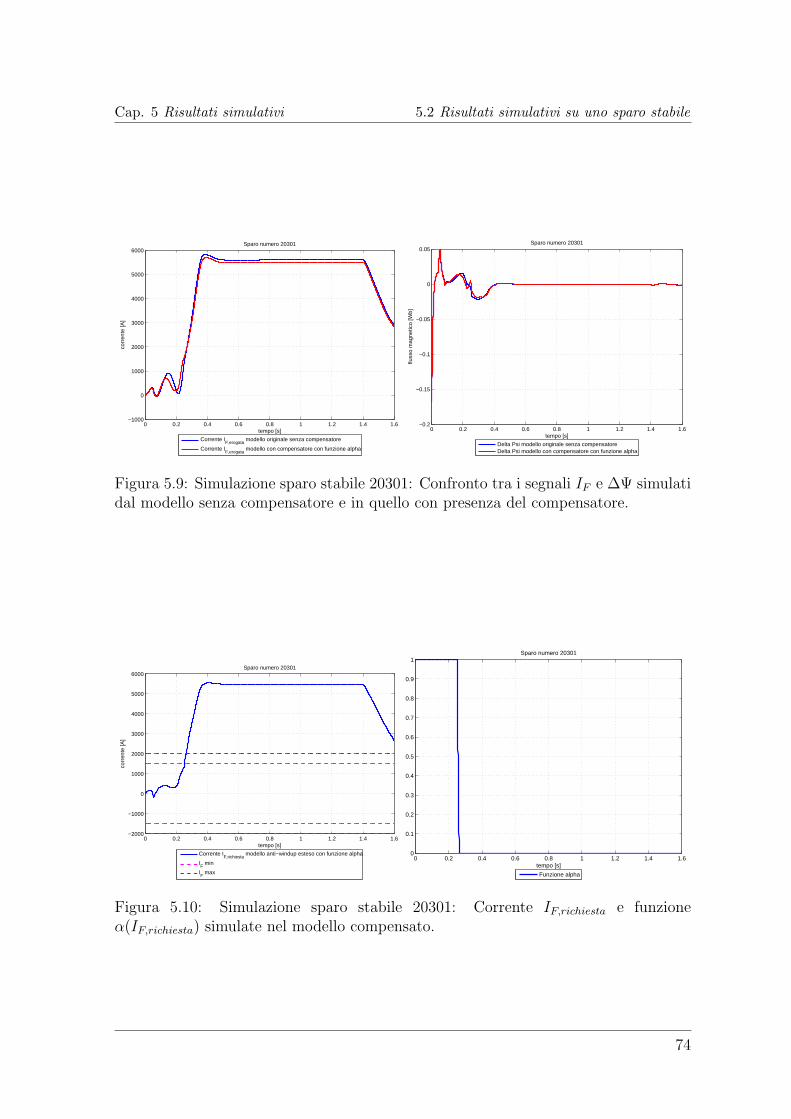
Cap. 5 Risultati simulativi 5.2 Risultati simulativi su uno sparo stabile
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−1000
0
1000
2000
3000
4000
5000
6000
tempo [s]
corr
ente
[A]
Sparo numero 20301
Corrente IF,erogata
modello originale senza compensatore
Corrente IF,erogata
modello con compensatore con funzione alpha
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−0.2
−0.15
−0.1
−0.05
0
0.05
tempo [s]
fluss
o m
agne
tico
[Wb]
Sparo numero 20301
Delta Psi modello originale senza compensatoreDelta Psi modello con compensatore con funzione alpha
Figura 5.9: Simulazione sparo stabile 20301: Confronto tra i segnali IF e ∆Ψ simulatidal modello senza compensatore e in quello con presenza del compensatore.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−2000
−1000
0
1000
2000
3000
4000
5000
6000
tempo [s]
corr
ente
[A]
Sparo numero 20301
Corrente IF,richiesta
modello anti−windup esteso con funzione alpha
IF min
IF max
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.60
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
tempo [s]
Sparo numero 20301
Funzione alpha
Figura 5.10: Simulazione sparo stabile 20301: Corrente IF,richiesta e funzioneα(IF,richiesta) simulate nel modello compensato.
74

Cap. 5 Risultati simulativi 5.2 Risultati simulativi su uno sparo stabile
si vede in figura 5.10 a destra. Essendo nullo α(IF,richiesta) per la maggior parte
dell’esperimento anche l’uscita del compensatore anti-windup e nulla. Si e quindi
avuto riscontro nelle simulazioni di come il compensatore anti-windup esteso dalla
funzione α(IF,richiesta) e progettato nel capitolo 3 adempia al compito di rendersi
trasparente nel regime di stabilita dell’esperimento.
In figura 5.11 si vedono gli errori tra i segnali IF,erogata e ∆Ψ dei modelli di base
e con compensatore tradotto in linguaggio C. Anche nella simulazione dello sparo
stabile 20301, l’errore commesso dal modello con compensatore tradotto in linguaggio
C rispetto a quello originale e sia per la corrente IF,erogata che per l’errore ∆Ψ di due
ordini di grandezza inferiore agli stessi segnali.
In figura 5.12 vengono mostrati i segnali IF,richiesta e α(IF,richiesta) per il modello
con compensatore tradotto in linguaggio C. Anche in questa simulazione data l’am-
piezza ridotta dell’errore di questi segnali rispetto agli stessi simulati nel modello con
compensatore Simulink, il comportamento del sistema non e variato sensibilimente a
seguito della discretizzazione del compensatore.
75

Cap. 5 Risultati simulativi 5.2 Risultati simulativi su uno sparo stabile
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−10
0
10
20
30
40
50
60
tempo [s]
corr
ente
[A]
Sparo numero 20301
Errore IF,erogata
con compensatore Simulink e discretizzato secondo Eulero
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−5
−4
−3
−2
−1
0
1
2
3
4
5x 10
−4
tempo [s]
fluss
o m
agne
tico
[Wb]
Sparo numero 20301
Delta Psi compensatore Simulink
Figura 5.11: Simulazione sparo stabile 20301: Errore tra i segnali IF e ∆Ψ delle simu-lazioni con compensatore Simulink e con compensatore discretizzato ed implementatoin linguaggio C.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−2000
−1000
0
1000
2000
3000
4000
5000
6000
tempo [s]
corr
ente
[A]
Sparo numero 20301
Corrente IF richiesta modello con funzione alpha in codice C
IF min
IF max
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−0.2
−0.15
−0.1
−0.05
0
0.05
tempo [s]
fluss
o m
agne
tico
[Wb]
Sparo numero 20301
Delta Psi compensatore in linguaggio C
Figura 5.12: Simulazione sparo stabile 20301: A sinistra corrente IF,richiesta simulatanel modello con compensatore discretizzato ed implementato in linguaggio C, a destraerrore ∆Ψ della stessa simulazione.
76

Capitolo 6
Conclusioni e sviluppi futuri
Questo Capitolo conclusivo e dedicato alle conclusioni sul lavorosvolto nella Tesi, ed alle prospettive di sperimentazione su FTUdell’estensione della legge di controllo progettata. Inoltre viene fattoun accenno ad uno futuro ulteriore sviluppo del sistema di controllodella posizione del plasma di FTU per il quale sono propedeutici irisuktati ottenuti in questa Tesi.
6.1 Conclusioni sui risultati ottenuti
La Tesi ha portato a compimento il cammino intrapreso dalle precedenti Tesi ([3],
[4], [5]) per il proponimento di una soluzione volta alla stabilizzazione dell’anello di
controllo della posizione orizzontale del plasma di Frascati Tokamak Upgrade.
Il lavoro di Tesi e stato inoltre un ulteriore, positivo e fruttuoso momento di incon-
tro tra l’Universita degli studi di Roma Tor Vergata (UNITV) e l’Ente per le Nuove
tecnologie, l’Energia e l’Ambiente (ENEA) per la loro collaborazione e lo sviluppo di
soluzioni a problematiche di comune interesse.
Il ciclo conclusosi con la Tesi, e in generale tutti i lavori svolti in collaborazione tra
UNITV ed ENEA, stanno incentivando una maggiore attenzione per i temi legati alla
fusione termonucleare controllata da parte della comunita controllistica. I risultati
degli studi sui principi di funzionamento del confinamento magnetico negli impianti
77

Cap. 6 Conclusioni e sviluppi futuri 6.1 Conclusioni sui risultati ottenuti
Tokamak, in particolare per quanto riguarda il controllo della posizione del plasma, de-
scritti nel Capitolo 1 testimoniano la volonta di proporre da parte di UNITV strategie
di controllo automatico sempre piu consapevoli della complessa natura dei fenomeni
di fusione termonucleare.
La Tesi ha contribuito alla proposta nell’ambito della fusione termonucleare con-
trollata di tecniche di controllo avanzate come la compensazione anti-windup. In
particolare la Tesi ha proposto nel contesto dell’impianto sperimentale FTU un siste-
ma di compensazione della non-linearita di uno degli attuatori tramite un’estensione
della legge di controllo attuale ispirata alla tecnica di compensazione anti-windup.
La soluzione di compensazione anti-windup progettata nel Capitolo 3 si dimostra
in simulazione poco invasiva all’interno dell’attuale sistema di controllo della posi-
zione del plasma di FTU, ma efficace ad eliminarne l’instabilita che si verifica. Essa
infatti a partire da un unico segnale gia presente in tempo reale nell’attuale legge
di controllo, ovvero la corrente richiesta all’avvolgimento F, interviene nell’anello di
controllo introducendo un unico segnale di correzione che va a correggere l’ingresso
dell’attuale controllore del processo. Il compensatore proposto nella Tesi (vedi figu-
ra 3.15) estende inoltre lo schema standard anti-windup, tramite la presenza al suo
interno del modello dell’attuatore AL-F e del blocco funzionale α.
La dinamica del covertitore AL-F che introduce la non-linearita indesiderata e
causa l’instabilita del sistema viene riprodotta all’interno del compensatore per ot-
tenere una stima della corrente effettivamente erogata dal convertitore, non essendo
dispondibile in tempo reale questa misura.
Il blocco funzionale α disattiva il compensatore nel regime di stabilita, garantendo
ad esso di non intervenire quando la corrente richiesta all’attuatore AL-F e ad alti
regimi e lo stesso attuatore non presenta un comportamento non-lineare.
78

Cap. 6 Conclusioni e sviluppi futuri 6.2 Sviluppi ulteriori della legge di controllo
L’implementazione in linguaggio C del compensatore anti-windup (vedi Capitolo
4) ha permesso di sperimentare anzitempo la bonta della traduzione in codice della
soluzione proposta per la stabilizzazione della posizione del plasma di FTU. Inoltre
i risultati simulativi illustrati nel Capitolo 5 hanno dimostrato che a seguito dell’in-
serimento del compensatore tradotto in C la dinamica del sistema a bassi regimi di
funzionamento dell’avvolgimento elettrico F viene sempre stabilizzata. Quest’ultimo
test simulativo con il compensatore tradotto in C e stato cruciale in quanto rappresen-
ta piu verosimilmente le reazioni che il sistema reale FTU avra a seguito dell’estensione
proposta nella Tesi per la legge di controllo della posizione del plasma.
Al momento della stesura del testo della Tesi il gruppo CODAS di FTU (gruppo
Sistema di Controllo e Acquisizione Dati) si sta dimostrando interessato all’inseri-
mento del compensatore anti-windup progettato nella Tesi nella legge di controllo
attuale. Nella fase di start-up dell’impianto della prossima campagna sperimentale
alcuni esperimenti verranno dedicati all’applicazione e al test sul campo della nuova
legge di controllo per la posizione del plasma. Per dimostrare la capacita del com-
pensatore proposto di stabilizzare il sistema a bassi regimi di funzionamento di AL-F
e viceversa di non intervenire negli alti regimi di funzionamento di AL-F, verrano
dedicati al test uno sparo con preprogrammato di corrente IF a bassi regimi ed uno
ad alti regimi.
6.2 Sviluppi ulteriori della legge di controllo
Un ulteriore motivo di interesse da parte dell’ENEA per il lavoro della presente Te-
si risiede nella sua propedeuticita rispetto all’applicazione di un’ulteriore estensione
della legge di controllo della posizione del plasma di FTU. Infatti, come spiegato nella
Tesi, la posizione orizzontale del plasma viene regolata da due avvolgimenti elettrici
79

Cap. 6 Conclusioni e sviluppi futuri 6.2 Sviluppi ulteriori della legge di controllo
che producono entrambi un campo magnetico verticale: l’avvolgimento V e l’avvol-
gimento F. Uno sviluppo futuro potrebbe vertere sull’implementazione di una legge
di controllo automatica che dinamicamente ripartisce il compito del mantenimento
dell’equilibrio del plasma nella posizione orizzontale preprogrammata tra i due avvol-
gimenti ridondanti V ed F. Al momento della stesura del testo di questa Tesi e gia
iniziato lo studio di questa nuova applicazione. La possibilita di utilizzare in maniera
dinamica le azioni degli avvolgimenti V ed F, e l’utilizzo congiunto dell’avvolgimento
H che regola la posizione orizzontale del plasma, permettera inoltre di estendere ulte-
riormente la legge di controllo aggiungendo la possibilta di preprogrammare a monte
dell’esperimento l’elongazione1 del plasma, ovvero la forma del plasma nella camera,
oltre alla sua posizione orizzontale e verticale come previsto attualmente.
1L’elongazione del plasma e il rapporto tra il diametro orizzontale e quello verticale della sezionepoloidale del plasma.
80

Appendice
Codice sorgente C sviluppato
Viene riportato di seguito il codice sorgente sviluppato che traducein linguaggio C il compensatore anti-windup proposto per l’esten-sione della legge di controllo di FTU di cui nei Capitoli 3 e 4 sonostati descritti il progetto la discretizzazione.
Compensatore anti-windup
/*
* compensatore_antiwindup_alf()
*
* Questa procedura C implementa il compensatore anti-windup progettato
* per la stabilizzazione della posizione orizzontale del plasma di FTU
* in corrispondenza ai bassi regimi di funzionamento di AL-F.
*
* Gli argomenti della procedura sono nell’ordine:
* - Ts : periodo di campionamento
* - corrente_IF_richiesta : corrente richiesta ad AL-F (somma del
* preprogrammato e della corrente di correzione calcolata dal PID)
* - corrente_IF_erogata : corrente F erogata effettivamente da AL-F
* - lower_bound : ampiezza in Ampere della corrente F entro la quale
* il compensatore anti-windup e’ completamente attivo
* - higher_bound : ampiezza in Ampere della corrente F oltre la
* quale il compensatore anti-windup e’ completamente disattivo
* - correzione_delta_psi : segnale uscita del compensatore, segnale
* di correzione di Delta PSI. Il segnale va aggiunto al segnale di
* ingresso del controllore PID dell’anello di controllo F
* - accensione_antiwindup : Valore che moltiplica l’uscita del
* compensatore anti-windup. Va impostato ad 1.0 per un corretto
* funzionamento del comepnsatore. Va impostato a 0.0 per
* disattivare per tutto lo sparo il compensatore
*
81

Appendice Codice sorgente C sviluppato
* La procedura ha delle sue variabili interne di tipo static che
* fungono da stato interno del modello. La procedura va chiamata ad
* ogni passo di campionamento (nello STATE_F) per un corretto
* funzionameto della stessa.
*/
void compensatore_antiwindup_alf(float Ts, float corrente_IF_richiesta,
float corrente_IF_erogata, float lower_bound, float higher_bound,
float *correzione_delta_psi, float accensione_antiwindup)
{
/* Stato interno del modello simulativo
della risposta della posizione orizzontale
del plasma di FTU */
static float x = 0.0;
/* Variabili di ingresso e di uscita del modello del plasma */
float u;
float y;
/* Parametri della funzione di trasferimento del modello del
plasma (K costante di tempo e K guadagno) */
float Tau = 0.008;
float K = -6.8750e-07;
/* Matrici discrete del modello della risposta del plasma */
float A, B, C, D;
/* Coefficienti della funzione alpha che disattiva
automaticamente il compensatore nel regime di stabilita’ */
float alpha;1float alpha2;
/* Argomento e valore restiuito dalla funzione alpha */
float modulo;
float valore_alpha;
/* Valutazione delle matrici discrete del modello del plasma */
A=Tau/(Tau+Ts);
B=1.0
C=-K*Ts/((Ts+Tau)*(Ts+Tau));
D=K/(Ts+Tau);
/* Controllo di correttezza dei valori limite della
funzione alpha */
if (lower_bound>=higher_bound ||
82

Appendice Codice sorgente C sviluppato
lower_bound<0.0 || higher_bound<0.0 )
{
lower_bound=1500.0;
higher_bound=2000.0;
}
/* Valutazione dei coefficienti della funzione alpha */
alpha1=1.0/(lower_bound-higher_bound);
alpha2=-higher_bound/(lower_bound-higher_bound);
/* Valutazione dell’argomento e del valore restiuito
dalla funzione alpha */
if (corrente_IF_richiesta < 0.0)
modulo=-corrente_IF_richiesta;
else
modulo=corrente_IF_richiesta;
if (modulo < lower_bound)
valore_alpha = 1.0;
else if (modulo > higher_bound)
valore_alpha = 0.0;
else
valore_alpha = alpha1*modulo + alpha2;
/* Valutazione della variabile di ingresso del modello
del plasma */
u=valore_alpha*(corrente_IF_richiesta-corrente_IF_erogata);
/* Valutazione della variabile di uscita del modello del plasma */
y = C*x + D*u;
/* Aggiornamento dello stato interno del modello del plasma */
x = A*x + B*u;
/* Scrittura del valore di uscita del compensatore anti-windup
sulla variabile di uscita */
*correzione_delta_psi=y*accensione_antiwindup;
}
Modello di AL-F
/*
* modello_alf()
*
83

Appendice Codice sorgente C sviluppato
* Questa procedura C implementa il modello del converitore AL-F di FTU.
* La procedura a partire dalla richiesta fatta dal sistema di controllo
* all’avvolgimento F stima la corrente effettivamente erogata dal
* convertitore AL-F.
*
* Gli argomenti della procedura sono nell’ordine:
* - Ts : periodo di campionamento
* - corrente_IF_richiesta : corrente richiesta ad AL-F (somma del
* preprogrammato e della corrente di correzione calcolata dal PID)
* - corrente_IF_erogata : puntatore alla variabile di uscita che
* conterra’ la stima della corrente F erogata da AL-F
*
* La procedura ha delle sue variabili interne di tipo static che fungono
* da stato interno del modello. La procedura va chiamata ad ogni passo
* di campionamento (nello STATE_F) per un corretto funzionameto della
* stessa.
*/
void modello_alf(float Ts, float corrente_IF_richiesta,
float *corrente_IF_erogata)
{
/* Variabili di stato del PID interno di AL-F */
static float StatoIntegratoreDiscreto=0.0;
static float StatoRitardoDiscreto=0.0;
/* Variabili di stato dei circuiti elettrici (ponti) di AL-F */
static float I1=1050.0;
static float I2=1050.0;
/* Guadagni del PID interno di AL-F e saturazione dello stesso */
float PHSCKp = 1.5;
float PHSCKd = 0.5;
float PHSCKi = 25.0;
float SaturazionePID=12500.0;
/* Parametri elettrici costanti di AL-F */
float GainI2=1.8;
float GainI1=1.8;
float Iw=1200.0;
float SaturazioneV1=5000.0;
float SaturazioneV2=5000.0;
float L=0.009;
float R1=0.0001;
float R2=R1;
float Vtir=1.8;
84

Appendice Codice sorgente C sviluppato
float Imin=50.0;
float Imax=8000.0;
float Lmax=0.02;
float Lmin=0.00004
float R=0.008;
/* Segnali interni al PID interno di AL-F */
float ingressoPIDdiscreto;
float UscitaIntegratore;
float UscitaRitardoDiscreto;
float UscitaDerivataDiscreta;
float uscitaPIDdiscreto;
/* Segnali elettrici di AL-F */
float V1,V2;
float L1,L2;
float dI1_dt;
float dI2_dt;
/* Elaborazione PID interno di AL-F */
/* Ingresso PID (errore tra la corrente richiesta e la corrente
erogata) */
ingressoPIDdiscreto=(corrente_IF_richiesta)-(I1-I2);
/* Integratore (valore di uscita, aggiornamento dello stato interno,
saturazione stato interno) */
UscitaIntegratore=PHSCKi*StatoIntegratoreDiscreto;
StatoIntegratoreDiscreto=
StatoIntegratoreDiscreto+(Ts)*PHSCKp*ingressoPIDdiscreto;
if (StatoIntegratoreDiscreto>SaturazionePID)
StatoIntegratoreDiscreto=SaturazionePID;
else if (StatoIntegratoreDiscreto<-SaturazionePID)
StatoIntegratoreDiscreto=-SaturazionePID;
/* Derivata (valore di uscita, aggiornamento dello stato interno) */
UscitaRitardoDiscreto=StatoRitardoDiscreto;
StatoRitardoDiscreto=PHSCKp*ingressoPIDdiscreto;
UscitaDerivataDiscreta=
PHSCKd*(PHSCKp*ingressoPIDdiscreto-UscitaRitardoDiscreto);
/* Uscita PID (calcolo uscita, saturazione uscita) */
uscitaPIDdiscreto=
PHSCKp*ingressoPIDdiscreto+UscitaIntegratore+UscitaDerivataDiscreta;
85

Appendice Codice sorgente C sviluppato
if (uscitaPIDdiscreto>SaturazionePID)
uscitaPIDdiscreto=SaturazionePID;
else if (uscitaPIDdiscreto<-SaturazionePID)
uscitaPIDdiscreto=-SaturazionePID;
/* Dinamica dei circuiti elettrici (ponti) di AL-F */
/* Calcolo delle correnti che verranno applicate sui ponti di AL-F */
V1=uscitaPIDdiscreto+Iw-GainI2*I2;
V2=-uscitaPIDdiscreto+Iw-GainI1*I1;
/* Saturazione delle richiesta di corrente */
if (V1 > SaturazioneV1)
V1 = SaturazioneV1;
else if (V1 < -SaturazioneV1)
V1 = -SaturazioneV1;
if (V2 > SaturazioneV2)
V2 = SaturazioneV2;
else if (V2 < -SaturazioneV2)
V2 = -SaturazioneV2;
/* Calcolo delle induttanze dei ponti di AL-F e loro saturazione */
L1=Lmax+(Lmin-Lmax)/(Imax-Imin)*(I1-Imin);
if (L1<Lmin) L1=Lmin;
if (L1>Lmax) L1=Lmax;
L2=Lmax+(Lmin-Lmax)/(Imax-Imin)*(I2-Imin);
if (L2<Lmin) L2=Lmin;
if (L2>Lmax) L2=Lmax;
/* Risoluzione dei circuiti elettrici di AL-F. Calcolo delle
derivate delle correnti sui ponti di AL-F */
if ( L*L1+L*L2+L1*L2<1e-6 ) {
dI1_dt=-8.0*Vtir*L2+(L*(V1+V2-I1*R1-I2*R2)+
L2*(V1-I1*R+I2*R+I2*R2-I1*R1-I2*R2))/1e-5;
dI2_dt=-8.0*Vtir*L1+(L*(V1+V2+I1*R1-I2*R2)+
L1*(V2-I1*R1-I2*R2+I1*R-I2*R+I1*R1))/1e-5; }
else {
dI1_dt=-8.0*Vtir*L2+(L*(V1+V2-I1*R1-I2*R2)+
L2*(V1-I1*R+I2*R+I2*R2-I1*R1-I2*R2))/(L*L1+L*L2+L1*L2);
dI2_dt=-8.0*Vtir*L1+(L*(V1+V2+I1*R1-I2*R2)+
L1*(V2-I1*R1-I2*R2+I1*R-I2*R+I1*R1))/(L*L1+L*L2+L1*L2);
}
/* Azione dei tiristori di raddrizzamento della corrente sui ponti
86

Appendice Codice sorgente C sviluppato
di AL-F */
if (!(I1>=0.0 || dI1_dt>=0.0))
dI1_dt=0.0;
if (!(I2>=0.0 || dI2_dt>=0.0))
dI2_dt=0.0;
/* Chiusura della procedura */
/* Scrittura del valore della stima effettuata della corrente F
erogata sulla variabile di uscita */
*corrente_IF_erogata=(I1-I2);
/* Aggiornamento delle variabili di stato elettriche
(correnti nei due ponti di AL-F) */
I1=I1+Ts*dI1_dt;
I2=I2+Ts*dI2_dt;
}
Ritardo unitario
/*
* ritardo_unitario()
*
* Questa procedura C implementa un ritardo unitario che ritarda il
* valore in ingresso di un passo di campionamento. Il suo valore
* iniziale di uscita e’ zero.
*
* Gli argomenti della procedura sono nell’ordine:
* - u : ingresso del ritardo unitario, segnale da ritardare
* - y : puntatore alla variabile di uscita in cui viene scritto
* il valore di u ritardato di un passo di campionamento
*/
void ritardo_unitario(float u, float *y)
{
/* variabile di stato del ritardo */
static float x = 0.0;
/* Scrittura del valore di uscita del ritardo unitario sulla
variabile di uscita*/
*y = x;
/* Aggiornamento dello stato del ritardo unitario */
x = u;
}
87

Bibliografia
[1] Luca Zaccarian, Andrew Teel, “Common framework for anti-windup, bumpless
transfer and reliable designs”, Automatica, 2002
[2] Luigi Pangione, “Sistema operativo open source Linux-RTAI: impiego in un siste-
ma real-time per esperimenti di fusione nucleare”, Tesi di Laurea Universita di
Roma Tor Vergata, 2003
[3] Stefano Cerino, “Modellazione e validazione simulativa di fenomeni di instabilita
nel sistema di controllo del Frascati Tokamak Upgrade”, Tesi di Laurea Universita
di Roma Tor Vergata, 2005
[4] Riccardo Vitelli, “Modellazione dell’alimentatore AL-F del Frascati Tokamak
Upgrade”, Tesi di Laurea Universita di Roma Tor Vergata, 2005
[5] Domenico Cascone, “Studio del sistema di controllo della posizione orizzontale del
plasma di FTU in ambiente Matlab/Simulink”, Tesi di Laurea Universita di Roma
Tor Vergata, 2006
[6] Roberto Andreani, “The Frascati Tokamak Upgrade Project”, Energia Nucleare,
1985
[7] John Wesson, “The Science of JET”, Marzo 2000
88