excitacion ge pgei-5294
TRANSCRIPT

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
GE Sistemas Industriales
PGEI-5294revisión 5
Control de campo de excitatriz sin escobillaESP1
MANUAL DE INSTRUCCIONES(Rige para las versiones ESP1 2.0 y 2.1)
Protección de laSecuencia de
Excitación
Estas instrucciones no pretenden cubrir todos los detalles o variaciones del equipo, como tampoco cubrirtodas las posibles contingencias que pueden encontrarse con respecto a las tareas de instalación,operación o mantenimiento. Si se requiere mayor información o si surgen problemas particulares que nohayan sido cubiertos ampliamente para los propósitos del comprador, el asunto deberá ser referido a laoficina de General Electric Canada Inc. más cercana.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
ÍNDICE
1. DESCRIPCIÓ N GENERAL Y CARACTERÍSTICAS
Convertidor de potencia estática
Funciones de regulación digital
Control de arranque y funcionamiento
Funciones de protección del rotor
Interfaz del usuario
Interfaz de sistema remoto
Opciones de cubierta e instalación
Asistencia del programa
2. ESPECIFICACIONES
2.1 Potencia de entrada2.2 Potencia de salida2.3 Entradas de transformador de instrumentos2.4 Entradas digitales2.5 Entrada de sensor de velocidad2.6 Entrada de potencia reactiva remota (opcional)2.7 Interfaz de receptor de sistema Rotector2.8 Salida en derivación de medidor2.9 Salidas de contactos digitales2.10 Salida de señal de velocidad2.11 Salidas Watt/VAr2.12 Conexión remota de la OIU (Unidad de Interfaz del Operador)
3. REQUISITOS DE INTERCONEXIÓ N
4. INSTRUCCIONES DE INSTALACIÓ N
4.1 Advertencia4.2 Ubicación e instalación
5. ARRANQUE Y DETECCIÓ N Y SOLUCIÓ N DE FALLAS
5.1 Proceso de arranque del control de excitatriz sin escobilla5.2 Guía para detección y solución de fallas

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
5.3 Operación de alimentaciónde campo5.4 Disparos del motor relacionados con el “Dispositivo Slipguard”5.5 Requerimientos de FASE CT/PT para operación básica (corriente)5.6 Requerimientos mínimos para plena operación (control VAr)5.7 Sección reservada5.8 Diagrama de tiempo de la excitatriz sin escobilla “APLICACIÓ N DE TIEMPO”5.9 Diagrama de tiempo de la excitatriz sin escobilla “APLICACIÓ N DE VELOCIDAD”5.10 Detección y solución de fallas del sistema Rotector II5.11 Detección y solución de fallas de la OIU y el módulo PLC
ANEXO A – DETALLES DE CARACTERÍSTICAS
A1.1 Convertidor de potencia estáticaA1.2 Funciones de regulación digitalA1.3 Control de encendido y funcionamientoA1.4 Funciones de protección del rotorA1.5 Interfaz del operadorA1.6 Interfaz de sistema remoto
ANEXO B – ASISTENCIA DEL PROGRAMA
ANEXO C – CONFIGURACIÓ N DE PARÁMETROS DE LA SUBRUTINA SYSSU
ANEXO D – MENSAJES DE LA OIU
ANEXO E – SIGLAS Y ABREVIATURAS
ANEXO F – CONTRASEÑAS
ANEXO G – ACCESO A LA INFORMACIÓ N DEL PLC
ANEXO H – INTERCONEXIONES TÍPICAS Y DIMENSIONES DE LOS EQUIPOS
ANEXO J – LISTA DE REPUESTOS

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
1. DESCRIPCIÓ N GENERAL Y CARACTERÍSTICAS
Aprobado por CSA y CUL; designación CE en proceso.Este control de excitatriz sin escobilla consiste en una alimentación de campo DC estática ajustable parauna excitatriz de motor sin escobilla, completo con características de detección amplias, protección del rotory los cálculos necesarios de tiempo y enclavamiento (interlock). El control utiliza componentessemiconductores clasificados de manera conservadora, un PLC Fanuc Serie 90-30 de General Electric,sensores confiables, conceptos de diseño comprobados e incorpora las características que se enumeran acontinuación. El control y las funciones de regulación son implementados en el software del PLC,respaldados por una RAM de batería y por una EPROM flash.
Convertidor de potencia estática
• Convertidor tiristor, 1 fase, (1-20 Amps.)• Transformador de aislamiento – 2.5 kVA 120/240VAC, 1 fase, 50/60 Hz (suministrado con cable e instalado
por separado)• (Opción) 3.0 kVA, 240, 380, 480 ó 575 VAC transformador primario• Fusibles HRC de entrada
Funciones de regulación digital
• Regulador de corriente de campo proporcional e integral (seguimiento seleccionable o rastreoautomático)
• Verificación de referencia de corriente de campo de excitatriz mínima o máxima• Valor de ajuste no volátil e incremento• Regulador VAr/PF proporcional e integral (seguimiento seleccionable o rastreo automático)• Función de respuesta de carga de impacto (seleccionable)• Control de valor de ajuste en unidades de ingeniería• Sistema de retroalimentación VAr redundante (con el uso de arranques CT y PT)
Control de arranque y funcionamiento
• Activado por el Interlock del arranque (52a)• Aplicación de campo por sensor de velocidad del motor (si ha sido conectado) y contador de alta
velocidad del PLC• Aplicación de campo por temporizador (opción de selección de campo)• Forzamiento de la corriente de campo en el tiempo de sincronización• Interlock de embrague y carga• Control del arranque de voltaje reducido (opción)
Funciones de protección del rotor
• Función de protección de desenganche de sincronización “Slipguard”digital• Secuencia incompleta• Subexcitación o sobreexcitación (independiente de la retroalimentación del regulador)• Protección contra atascamiento mediante el uso de un sensor de velocidad del motor (si ha sido
conectada)• Protección y detección térmica para barra amortiguadora y cara del polo (si ha sido conectada)*• Indicación de falla de conexión a tierra del motor y alarma o disparo *

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
• Indicación de temperatura del motor y alarma o disparo *• Relé (listo) de autoprotección de disparo reforzado para el arranque del motor• Bloqueo del arranque para sobretemperatura del devanado de encendido• Monitoreo del diodo de excitatriz sin escobilla (opción)
* = El motor debe tener conectado un sistema de telemetría Rotector II.
Interfaz del usuario
• Amperímetro analógico integral de campo• Interfaz digital del operador (pantalla electrofluorescente y tablero sensible al tacto)
- Despliegue de la condición del control y la secuencia de la excitatriz- Selección del valor de ajuste y el modo local o remoto- Comparación y condición del transductor PF- Ajuste de modo local y referencia- Despliegue digital de variables clave (por ejemplo, corriente de campo, VAr, PF, kW,
RPM, temperaturas, etc.)- Reinicialización manual del control- Registro de eventos (no volátil) con estampado de fecha y hora (opción de
impresión)- Acceso que puede bloquearse para el ajuste de parámetros- Configuración de fecha y hora- Funciones de la impresora de registro
Interfaz remota del sistema
• 4-20 mA referencia VAr remota disponible• 4-20 mA señal de velocidad remota disponible• Genius (opción), Modbus RTU RS485, Ethernet o GE SNP
Opciones de cubierta e instalación
• Panel abierto 23”alto x 22” ancho x 10” diámetro para instalación en pared• (Opción) Cubículo FREE STANDING NEMA1 (IEC-IP21) 90” alto x 30” ancho x 24” diámetro• (Opción) Cubículo FREE STANDING NEMA1 (IEC-IP55) 90” alto x 30” ancho x 24” diámetro
Asistencia del programa
• Utilidad sencilla de carga de configuración y programa (basada en computador personal)• Cable en serie y convertidor de interfaz (RS232/485) para computador personal
Los detalles sobre estas características se incluyen en los anexos o en documentos separados.
2. ESPECIFICACIONES
2.1 Potencia de entrada:

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Máximo de 2.5 kVA a 120 voltios AC rms., 50 ó 60 Hz, monofase, línea a línea. La fuente de potenciadebe ser capaz de alimentar el empuje para el transformador de aislamiento de 2.5 kVA. El kVA realextraído se relaciona con la corriente de campo de la excitatriz, y el valor nominal de 2.5 kVA sólo serequerirá a 16 amperios de corriente DC de campo de la excitatriz. Tolerancia de voltaje: ± 20%. Paraotros voltajes de alimentación se tiene a la disposición un transformador de 3 kVA para 220-240, 380,480 y 575 VAC.
2.2 Potencia de salida:
Nominal de 1.0 a 16 amperios DC (ó 20 amperios con un transformador más grande) a un voltaje máximode campo caliente de 125 voltios DC. El valor máximo de la corriente de salida es fijado por las constantesdel programa y es protegido por la detección de subcorriente y sobrecorriente, la cual es independiente delos reguladores y su retroalimentación.
Se suministra un control de corriente de campo de excitatriz que es proporcional e integral y que da comoresultado una regulación superior de ± 1% sobre el rango de temperatura del ambiente especificada. Sesuministra una compensación para una variación transitoria del voltaje de entrada de ± 20% y un cambiodel 25% en la impedancia de campo debido a los efectos de calentamiento.
2.3 Entradas del transformador de instrumentos:
El control requiere de entradas CT y PT tanto para la protección de pérdida de sincronización como para elcontrol de potencia reactiva. Las cargas de CT por fase son 0.30 VA en CT de 5 amperios, y las cargas dePT por fase son 0.15 VA a 120V. Se suministran bloques terminales de enlaces deslizantes y se hanadaptado enlaces cortocircuitantes a los bloques terminales CT.
2.4 Entradas digitales:
Las entradas digitales del PLC deben ser del tipo de contacto o estática libres de voltaje. El voltaje nominalsuministrado por el PLC hacia estos contactos es de 120VAC, con fusibles de 5 amperios.
2.5 Entrada del sensor de velocidad:
El sensor de velocidad normalmente es suministrado con el motor y se adapta a los requerimientos decontrol. Debe ser un sensor del tipo de alta frecuencia y velocidad cero, con capacidades de accionamientopara líneas largas y una carga de 400 ohmios. Se recomienda el modelo Airpax H1605-005 ó H1625-025(peligroso).
2.6 Entrada de potencia reactiva remota (opcional):
La referencia de potencia reactiva puede suministrarse de manera remota mediante un lazo de 4-20mA, ouna variedad de enlaces en serie. Se suministran cuantro entradas digitales para activar la fuente remota yseleccionar el modo de operación (corriente de campo de excitatriz, VAr o PF).
2.7 Interfaz de receptor del sistema Rotector:
Se suministran 120 VAC desde el control hasta el receptor Rotector II que se encuentra instalado en elmotor. La interfaz de datos es una conexión doble estándar RS485, capaz de cubrir distancias de hasta1200m. Para alcanzar las distancias máximas, utilice un cable de propósito específico de baja capacitancia

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
como el Belden 9505. Todos los conductores no designados deberían utilizarse para la conexión a tierra dela señal.
2.8 Salida en derivación de medidor:
Se suministra una derivación de medidor DC, con una clasificación de 20A-100mV, en el circuito de salidadel control de la excitatriz, para la conexión de un medidor externo en caso de que sea necesario. Éstadebería ser utilizada con un medidor de 20A, 100mV ó 10A, 50mV dependiendo de los requerimientos decampo de la excitatriz.
2.9 Salidas de contacto digital:
Todas las salidas digitales son contactos de relé sin voltaje. Los del relé EXC READY tienen unaclasificación IEC A600/P600:
AC Make 60A @ 7200VAAC Carry 10A hasta 600VAC Break 6A @ 720VADC Carry 5A @ 600VDC Break/Make 138VA hasta 600V
Otros contactos han sido clasificados de la siguiente manera:
5-30VDC @ 4A resistivo5-250VAC @ 4A resistivoCarga mínima 10 mA
2.10 Salida de señal de velocidad:
Una salida de 4-20 mA ha sido suministrada para indicación de velocidad remota. El voltaje máximopermitido es de 20V.
2.11 Salidas Watt/VAr
Las señales (-)1-0-1 mA del transductor Watt/VAr pueden ser utilizadas para mediciones. Es necesariocuidar que no se dañe la calidad o el rango de estas señales ya que las mismas son utilizadas por elcontrol. Las conexiones deberían ser cortas (< 3m) y deben hacerse con buenos cables blindados yretorcidos. No deben utilizarse cargas que superen los 1000 ohmios. Las señales deben ser tratadas comode bajo nivel y son susceptibles al ruido. Para distancias mayores de 3m debería utilizarse un convertidorde señal aislante.
2.12 Conexión remota de la OIU (Unidad de Interfaz del Operador):
La OIU puede ser instalada de manera remota cuando se utilice la versión de panel abierto. En este caso,utilice el cable de 3m que se suministra con la OIU. El cable debe ser tratado como un cable de señal debajo nivel.
3. REQUISITOS DE INTERCONEXIÓ N:
(Refiérase al diagrama básico de conexión típica que ha sido incluido en el Anexo H).

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Las conexiones de entrada y salida y sus designaciones pueden observarse en el Diagrama Básico deInterconexiones. Cada contrato tendrá su propio diagrama básico de interconexiones y el mismoprevalecerá sobre el diagrama del Anexo. Las capacidades de dimensiones del cable de bloque terminal semuestran en el diagrama de contorno.
Con el fin de obtener el servicio más confiable, debería utilizarse el tipo de cable (por ejemplo, retorcidoblindado, etc.) que se muestra en el diagrama básico. Muchas de las conexiones a la unidad se hacenhacia el bloque terminal del control ubicado en la parte superior de la unidad.
Refiérase al diagrama básico de conexiones típicas para los siguientes comentarios. Los bloquesterminales se encuentran numerados sobre la base del nivel de señal de cableado. Los bloques 3TBnn sonpara señales de nivel 3 (alto nivel, ruido) como es el caso de los circuitos de potencia o relés. Los bloques1TBnn se utilizan para señales de nivel 1 (bajo nivel, susceptible) como son los circuitos analógicos. Unabuena práctica de cableado consiste en no mezclar el cableado de niveles diferentes.
• Fuente de potencia. Se conecta con FU1, FU2. Se encuentran disponibles varias configuracionesde alimentación de potencia. Se muestra la versión por omisión de 120VAC, aunque se describenotras versiones en el Anexo A 1.1. La alimentación debe ser capaz de suministrar el empuje a untransformador de 2.5 kVA en la versión de 120V y 3.0 kVA para otras versiones.
• Tierra de seguridad. La unidad debe estar conectada a una tierra de seguridad con un conductoradecuado. La tierra de seguridad debe cumplir con las regulaciones locales. No pueden utilizarselos pernos de montaje para que suministren la conexión a tierra de seguridad.
• Transformador de aislamiento. Se conecta a los bloques terminales H1....X2 a través de unconector de 90° a un lado del control ESP1. Se suministra con el control de la excitatriz e incluyeun cable de 3 m. Cuando el equipo se instala en una cubierta secundaria, ya sea de GE o de otroproveedor, el transformador es del tipo abierto. Cuando el control de la excitatriz usa su propiacubierta integral (pantalla superior e inferior), el transformador será suministrado con una cubiertaNEMA1 para ser instalado en la pared o en el piso.
• Entradas digitales de 120VAC. Todas las entradas discretas tienen aplicado un voltaje de 120 AC.Deben ser contactos de relé sin voltaje o dispositivos estáticos clasificados para este voltaje.Conectadas a 3TB06 a 3TB20.
o La entrada 1 (%/1) es para un contacto auxiliar de la Línea del motor (52a o M) ointerruptor de Funcionamiento (42 a)
o La entrada 2 se reserva para el interruptor de encendido o para el arranque de voltajereducido (6 a) y no se usa para arranques sencillos “a través de la línea”.
o La entrada 3 es para reinicialización automática. GE recomienda que no se use estepuente hasta que el equipo haya sido completamente probado y se encuentre enfuncionamiento. Hasta ese momento, debe utilizarse la reinicialización manual en elequipo.
o La entrada 4 es para un puente de acceso y sólo se utilizará si deben cambiarse losparámetros. Véase el Anexo C.
o La entrada 5 se reserva para la selección del control remoto de valor de ajuste. Véase A1.6.
o La entrada 6 se reserva para seleccionar el modo de corriente de una operación remotade valor de ajuste. Véase A 1.6.
o La entrada 7 se reserva para seleccionar el modo VAr de una operación remota de valorde ajuste. Véase A 1.6.
o La entrada 8 se reserva para el modo PF. Véase A 1.6.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
o Las entradas 9, 11, 12 son adicionales para funciones programadas especiales.o Todas las demás entradas son utilizadas por contactos internos.
• Potencia del dispositivo Rotector. Conectado a 3TB01-03. Ofrece la mejor configuración sin ruido,en vez de suministrar la potencia para el dispositivo Rotector desde una fuente no confiable.
• Las entradas PT (transformador potencial) se conectan a bloques terminales PT especiales conenlaces deslizantes. Varias conexiones PT son permisivos además de “open delta” estándar quese muestra. Consulte al representante de GE acerca de otras configuraciones. Una fase PTcorrecta es esencial. Véase la Sección 5. Véase la Sección 2.3 para cargas.
• Las entradas CT (transformador de corriente) están conectadas a bloques terminales especialesCT con enlaces cortocircuitados. Una fase CT correcta es esencial. Véase la Sección 5. Véase laSección 2.3 para cargas.
• Salida DC (DC + & DC-). Esta es la salida del campo de excitatriz sin escobilla. Debe utilizarse uncable grande para mantener la caída de voltaje en el cableado por debajo de 10 voltios.
• Salidas en derivación de medidor (SH + & SH -). Estos puntos se conectan con un amperímetronominal externo en derivación. GE suministrará el medidor suelto para que sea instalado en lacompuerta de la unidad del cliente. Si la unidad es suministrada por GE, el medidor será instaladopor GE. Los dibujos para los orificios del medidor se encuentran en el anexo.
• Bloqueo de no arranque “NO START BLOCK”. 3TB21, 22. Véase el punto 5.1. Un contacto de reléde salida se cierra para indicar que el control ESP1 ha ordenado un bloqueo de no arranque. Estaorden debe ser utilizada en el DCS de la planta para evitar el arranque del motor.
• Relé EXC READY. 3TB33-40. Véanse los puntos 5.1 y 5.11. Únicamente para propósitosilustrativos se muestra el relé conectado a un circuito de encendido típico. El relé debe conectarsede manera que el arranque se dispare si se desenergiza el relé. De esta forma, el motor no puedeser encendido hasta que se energice el relé.
• Relé NO ALARM. 3TB23, 24. Indica que no existen alarmas (sin disparo).• Relé MTR SYNC-OK TO LOAD. 3TB25, 26. Se cierra el contacto para indicar que el proceso de
sincronización se ha completado y que puede aplicarse carga al motor.• Salidas opcionales. 3TB27-32. Son salidas de relé opcionales para contratos específicos. Consulte
el diagrama básico de interconexiones para el contrato específico de estas salidas.• Opción de potencia externa. 3TB05, 04. No debe utilizarse sin la autorización de GE. Se usa como
opción específica de potencia externa de menos de 3 amperios.• Sensor de velocidad. 1TB15-18. El cable que va hacia el sensor en el motor debería ser un cable
conductor 3 blindado, del tipo retorcido y con clasificación de buena señal. La capacitancia deberíaser de 50 pF por pie o menos. Se aplicarán las regulaciones para cableado de nivel 1.
• Referencia remota. 1TB7-10. Esta referencia aparece configurada para 4-20 mA, pero puedeconfigurarse para otros niveles de entrada. Véase el Anexo A 1.6 para la descripción de funciones.
• Enlace de datos en serie del dispositivo Rotector. 1TB01-06. Observe la información del cableadoque aparece en el diagrama. Es una línea de señal RS485; deben seguirse buenas prácticas parael cableado de las señales de datos.
• Unidad de Interfaz del Operador (OIU). Se suministra suelta con un cable de 3 m cuando el controlESP1 es instalado en la unidad del cliente. Las perforaciones del panel y los datos de contornoaparecen en el Anexo H.
• Salidas de medidor WATT y VAr. 1TB23-26. Son señales de muy bajo nivel utilizadasinternamente para propósitos de control y protección. Si se usan de forma externa, el cableadodebe ser corto, debe tenderse con cuidado y las cargas deberán respetar la información descritaen el diagrama.
• Señal de velocidad. 1TB11-14. Es una señal de 4-20 mA que puede convertirse en una señal de1-5V si se conecta la carga interna (conectar 11 a 12). El valor máximo será 20VDC.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
• Puerto Modbus. Es un conector D-subminiatura hembra en serie de 25 pines. Hay dos puertos enel mismo cable, cuyo otro extremo termina en la parte frontal del módulo IC693CMM311.Asegúrese de utilizar el puerto 2 del cable “T” para la conexión Modbus. El conector de cable quese muestra en el diagrama es fabricado en el sitio para el cable del cliente. Las conexiones que semuestran son para una interfaz RS485 media doble de 2 cables, que es el estándar para Modbus.El puerto no se encuentra aislado ópticamente, por lo que la señal de conexión a tierra provienedel ESP1. No es una buena práctica unir las señales de tierra de varios equipos dentro de laRS485.
• Salida 24VDC. 1TB21-22. No debe ser utilizada sin la autorización de GE. Se usa como opciónespecífica de potencia externa de menos de 150 mA.
Contorno(Refiérase al diagrama de contorno del subpanel). Cuando se suministra una unidad adicional, eso seráreflejado en el diagrama de contorno específico del contrato.
Componentes remotos instaladosRefiérase al anexo donde aparecen los contornos y las perforaciones si se suministra cualquiercomponente remoto instalado.
4. INSTRUCCIONES DE INSTALACIÓ N:
4.1 Cuidado:
Esta unidad ha sido sometida en la fábrica a todas las pruebas y calibraciones que se requieren para elmotor para el cual se ha suministrado. Sin embargo, debido a algunos factores como la reactancia delsistema de potencia o las diferencias en las cargas del motor, deberán realizarse algunos ajustes en el áreahasta obtener el sistema final. Los ajustes deberán realizarse únicamente cuando el motor se encuentreapagado y cuando la potencia hacia el estator del motor haya sido asegurada. Los ajustes deben serllevados a cabo por personas que conozcan los efectos que comportan tales ajustes sobre el motor y elsistema de potencia. Los cambios de temporizadores y otros elementos de control deberían ser hechossolamente por personal calificado, siguiendo cuidadosamente las instrucciones aquí suministradas.
4.2 Ubicación e instalación:
La versión de la unidad que puede ser instalada en la pared debe colocarse en un sitio limpio, seco y QUENO REPRESENTE NINGÚN PELIGRO, con una temperatura que oscile entre 0 y 40° C. Lasclasificaciones de las unidades rigen para altitudes de 0 a 1.000 metros sobre el nivel del mar. Se requiereuna corrección de clasificación para altitudes mayores.
Si el control se encuentra dentro de una cubierta o unidad secundaria, deberá regirse por los códigos paracubiertas NEMA/IEC designados en el manual del equipo para las condiciones ambientales permitidas.
Las cubiertas ventiladas o a prueba de goteo contarán con una o más cubiertas removibles, las cualespueden retirarse y perforarse para la ubicación de los conectores de las terminaciones de los cables.
CUIDADO CUIDADO CUIDADOLa modificación del programa o el hardware de este sistema sin la autorización por escrito deGE puede influir sobre la garantía de todo el sistema, incluídas las máquinas.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
5. ARRANQUE Y DETECCIÓ N Y SOLUCIÓ N DE FALLAS
5.1 PROCESO DE ARRANQUE DEL CONTROL DE LA EXCITATRIZ SIN ESCOBILLA
Existen varios pasos lógicos y en secuencia que deben seguirse a la hora de arrancar este tipo de control.
Verifique las conexiones de acuerdo con el diagrama básico
Verifique mediante pruebas de continuidad cada conexión desde y hacia el control de excitatriz sin escobillaESP1 y compare los datos con el diagrama básico que ha sido suministrado para esa instalaciónespecífica.
Verifique la potencia de entrada
Desconecte la entrada de potencia en la unidad (abra los fusibles FU1 y FU2) y verifique que la fuente depotencia a la unidad sea del voltaje adecuado. Extraiga FU3 y FU4 y energice el control para asegurar quela fuente tiene la capacidad requerida para el impulso del transformador, y que la caída de voltaje de lafuente es menor de 5% durante el impulso. Vuelva a colocar FU3 y FU4 y revise que la alimentación depotencia al PLC indique una secuencia adecuada de captación de potencia. El diodo PWR deberíaencenderse tan pronto como se aplique potencia. El diodo OK titilará con regularidad durante algunossegundos mientras el PLC realiza una verificación automática y una prueba de configuración. El diodo OKpermanecerá encendido cuando finalice la prueba. Seguidamente, deberá iluminarse el diodo RUN. Eldiodo BATT no debería estar iluminado. Si se iluminara, sería una indicación de baja batería o ausencia dela misma. El control podrá funcionar con una batería baja o cuando ya no tenga batería, pero los niveles delos valores de ajuste para la corriente de campo de la excitatriz o los VAr de la máquina deberánconfigurarse de nuevo cuando se reponga la potencia AC. Véase la descripción de la subrutina SYSSUpara un método para evitar la pérdida de los valores de ajuste en ausencia de batería.
Pruebe los circuitos de disparo del interruptor
Pruebe que el control puede ser reinicializado por la tecla de función de la OIU (la OIU mostrará la palabra“READY” cuando haya sido reinicializada). El relé EXC READY debería energizarse. Mantenga el arranqueen la posición de prueba y verifique que cuando se desenergice el relé EXC READY se dispareinmediatamente el arranque. El relé EXC READY se desenergizará si se retira la potencia de control. Ahoraverifique que el arranque no se cierre cuando se desenergice el relé EXC READY.
El BLOQUEO DE NO ARRANQUE (Q3) debería estar conectado al DCS para evitar el encendido del motorcuando este contacto se encuentre abierto. Si se enciende el motor con este contacto abierto se produciráun disparo por medio del relé EXC READY.
Igualmente, verifique que el interlock del arranque (52 a) hacia las entradas del control indique en la luz delmódulo de entrada digital cuándo el arranque esté cerrado (haga esto con el motor desconectado o elarranque en la posición de “prueba”).
Verifique las fases CT y PT
Este es un paso sumamente importante. Con el uso de un medidor adecuado, verifique que las señales PTprovengan de las fases correctas y que la rotación de fase sea positiva (Es decir, el pico positivo de L1-L2inmediatamente precede al pico positivo de L2-L3, el cual precede a su vez inmediatamente al pico positivode L3-L1).

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Asimismo, revise, mediante una prueba de inyección adecuada, que las señales CT provengan de las fasescorrectas y que la polaridad sea adecuada. Si no se realizan las pruebas de este circuito puede perdersemucho tiempo más adelante en el proceso. Si usted no está seguro de las conexiones correctas, contrateun servicio que tenga la instrumentación correcta para realizar el trabajo y garantizar los resultados.
Revise los ajustes de los parámetros
Utilice la OIU (véanse las instrucciones de operación de la OIU) para revisar todos los ajustes ycompararlos con los valores de configuración del sistema de control (SYSSU) de la excitatriz sin escobillaESP1 que se encuentran en el PGEI principal de este equipo. Si existe duda acerca de cuántos aspectosdeben corresponder a la SYSSU, o sobre los ajustes en el control, consulte a la fábrica o a surepresentante de GE. Asimismo, verifique que el reloj de la OIU indique la hora correcta. Esto será útilpara revisiones posteriores del registro de eventos.
Haga una prueba de la corriente del campo de la excitatriz sin escobilla
Coloque el control de la excitatriz sin escobilla ESP1 en la condición READY, con el arranque abierto, ypresione la tecla TEST en la OIU (no el paso de prueba). Deberá iniciarse una corriente de campo deexcitatriz máxima que durará aproximadamente 5 segundos. La prueba no deberá repetirse hasta tanto notranscurra un minuto. Esta es una buena prueba para verificar la operación de los ajustes de subcorriente ysobrecorriente del amperímetro de corriente de campo de la excitatriz. Estos también se indican en elmódulo de entrada digital del PLC (véase la cubierta frontal del módulo). Una buena práctica consiste enhacer un registro de la respuesta del regulador de corriente bajo estas condiciones, para referencia futura.Conecte un grabador al punto de primera entrada analógica del PLC y repita la prueba (véase la cubiertafrontal del módulo). La corriente debería aumentar hasta el valor máximo permitido, permanecer constantedurante unos segundos y regresar al valor cero. La respuesta que usted registre quizás no represente larespuesta de “señal menor”, pero es válida como referencia para comparaciones futuras bajo las mismascondiciones.
La respuesta del regulador es fijada por los parámetros en la subrutina SYSSU y se establece en la fábrica.No deberían realizarse cambios. Sin embargo, si llegara a requerirse algún cambio, éste debe ser realizadopor personas capacitadas. En caso de dudas, puede consultar a la fábrica o a su representante de GE.
CORRIENTE
5 SEG.
Cuando se trata de grandes cambios decorriente, la tasa de aumento es limitadapor el voltaje maximo disponible, y la tasade caida por la constante de tiempo delcircuito.
TIEMPO

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Arranque de prueba – verifique el disparo
Cuando el motor y el arranque (incluídos los relés de protección del estator) estén listos para ser puestosen funcionamiento, desconecte temporalmente la salida ENABLE FIELD SUPPLY del PLC (%Q2). Si setiene conectado un sensor de velocidad, desconecte también su cable blanco (señal) temporalmente.
Arranque el motor. El control debería disparar el arranque e indicar una falla en la OIU. Si se haconfigurado una aplicación de encendido y campo detectada por velocidad, la falla debería indicar undisparo por atascamiento (STALL TRIP). Vuelva a conectar el cable de señal de sensor de velocidad.
Si se ha configurado una aplicación de campo de temporizador, la falla debería indicar un disparo deldispositivo Slipguard (SLIPGUARD TRIP).
Para los controles configurados por velocidad, puede intentarse un segundo arranque después detranscurrido un período específico para el enfriamiento, con el propósito de verificar el disparo deldispositivo Slipguard (SLIPGUARD TRIP).

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
5.2 Guía de detección y solución de problemas:
PROBLEMA POSIBLE CAUSA ACCIÓ NAtascamiento detectado Verifique el sensor de velocidad
Verifique el ajuste de la curva deprotección contra atascamientoReduzca la carga del motordurante el arranque
Disparo de secuencia incompleta Revise el ajuste del temporizadorINCSReduzca la carga del motordurante el arranque
Falla de alimentación de campo Revise los fusiblesVerifique la entrada de activaciónCambie el módulo o la tarjeta
1. El motor alcanza laaceleración, pero se disparaantes de llegar a la velocidad desincronización; no se aplicacampo de la excitatriz.
Disparo del dispositivo Slipguardpor baja velocidad
Repare el Interlock del arranque(52 a)
2. El motor se acelera, alcanza lavelocidad de sincronización y sedispara
Disparo del dispositivo Slipguard(factor de potencia)
Revise CT/PT según el diagramabásicoVerifique el nivel de campo de laexcitatrizProblema de la excitatriz sinescobillaTemporizador de activación deldispositivo Slipguard graduadomuy corto (Véase el Manual delusuario – pantallas deconfiguración #22)
Sensor de velocidad dañado Cambie el sensor de velocidad3. La corriente de campo seactiva a baja velocidad Ajuste inadecuado de
temporizador de aplicación decampo o aceleración demasiadoprolongada
Ajuste los valores deltemporizador o verifique el tiempode arranque
Corriente de campo de laexcitatriz demasiado baja
Aumente la fijación mínima de lacorriente de campo
4. Disparo del dispositivoSlipguard cuando el motor estácargado Problema con la excitatriz sin
escobilla del motorLa carga ha sido aplicadademasiado rápido
Detecte y corrija la falla de laexcitatrizReduzca la tasa de aplicación dela carga
Corriente de campo demasiadobaja
Revise los valores de límite yajuste de incremento
5. Disparo del dispositivoSlipguard – intento prolongado desincronización Problema con la excitatriz sin
escobilla del motorDetecte y corrija la falla de laexcitatriz
Si el transformador de aislamiento falla, éste debería ser reemplazado por una unidad idéntica. Comosolución temporal, puede ser reemplazado por una unidad de 4-5 kVA 120/240V a 240V. Conecte el voltajeprimario de 120/240V al igual que con el transformador original y use el voltaje secundario de 240V en lugar

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
del voltaje secundario original del transformador de 155V. Siga un procedimiento similar al de otros voltajesprimarios específicos de su contrato.
5.3 Operación de la alimentación de campo:
Para probar que la alimentación de campo, la retroalimentación de corriente y el medidor de corriente estánfuncionando adecuadamente, presione la tecla TEST en la OIU. De esta manera se activará la alimentaciónde campo y debería producirse una corriente de campo de la excitatriz durante aproximadamente 5segundos.
Un método alterno de prueba consiste en cortocircuitar los terminales 1TB9-10 del módulo de potencia. NOdeje el campo energizado durante más de 5 segundos en la condición de reposo sin un período de 1minuto de enfriamiento.
5.4 Disparos del motor relacionados con el dispositivo Slipguard:
5.4.1 La función del dispositivo Slipguard es disparar el motor inmediatamente después delarranque:
Un disparo del dispositivo Slipguard inmediatamente después del arranque indicaría que el interlock 52a noestá funcionando. Normalmente la función Slipguard es desactivada durante el período de arranque, pero siel interlock está defectuoso, la función Slipguard detectará un factor de potencia retardado ya que no hasido desactivado para el arranque por el PLC. El PLC utiliza el interlock 52a para este propósito. Esteinterlock se cierra cuando el interruptor del motor se cierra. Seguidamente, el PLC desactiva la unidad deSlipguard. El dispositivo Slipguard permanecerá desactivado durante aproximadamente 5 segundosdespués de la aplicación del campo. Verifique la luz de entrada digital del PLC (véase la cubierta delmódulo) cuando el interlock 52a se encuentre en operación.
Asegúrese de que el disparo inmediato provenga del dispositivo Slipguard y no sea causado por algúnproblema en el arranque. Verifique que el cableado del relé EXC Ready sea correcto. El arranque debedispararse cuando el EXC Ready sea desenergizado. Asimismo asegúrese de que el valor de PT para elControl de la excitatriz sin escobilla ESP1 reciba potencia antes de que se cierre el interruptor.
5.4.2 Disparo del dispositivo Slipguard cinco segundos después de la aplicación del campo:
Un disparo del dispositivo Slipguard cinco segundos después de la aplicación del campo indicará que lafunción de Slipguard está detectando un factor de potencia deficiente después de que ha sido activada.
Esto puede tener varias causas:a) Falta de corriente de campo (excitatriz o motor), posiblemente encendido prolongado del SCR de
pata de cabra. Haga un registro del voltaje del estator y de la corriente de campo de la excitatriz,durante el arranque, y consulte a un representante de GE sobre la posibilidad de alterar losajustes de valores de la fábrica.
b) Malas conexiones CT/PT hacia el control, lo que conlleva a una detección incorrecta del valor PF(véase la sección 5.5).
c) Falla en la detección de la corriente CT o el voltaje PT en el control, o transductor Watt VArdefectuoso.
5.5 Requerimientos de FASE CT/PT para una operación básica (corriente):

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Si se determina que la fase de CT/PT hacia el control de excitatriz sin escobilla ESP1 es incorrecta, puedehacer un diagnóstico del problema de fase CT/PT utilizando el equipo de prueba adecuado. Esto permite laidentificación de la rotación de fase correcta de las señales PT y demuestra que el circuito de controles estáfuncionando adecuadamente. Se ha suministrado un medio de desvío de la protección del dispositivoSlipguard para permitir la selección de la retroalimentación CT que funcione con una conexión PTespecífica. Véase el manual del usuario PGEI 5295.
Cuidado: Al hacer un desvío de la función Slipguard se desactiva la protección contra la pérdida desincronización. Mientras el dispositivo Slipguard se encuentre desactivado, usted deberá realizarmanualmente la protección del motor.
Siempre que el cableado CT y PT hacia el control de la excitatriz esté correcto para la operación de lafunción del dispositivo Slipguard, se permite la operación bajo el control de corriente de campo. Lasiguiente descripción del arranque demuestra cómo se comportará un motor sin carga durante la secuenciade arranque, suponiendo que el control ha sido ajustado en el modo de corriente de campo constante. Lasindicaciones que deben verse de la función Slipguard deben ser las mismas:
a) Cuando el interruptor del motor se cierra y el motor se acelera, el factor de potencia seretardará y oscilará entre 0.1 y 0.4. El tiempo de aceleración hasta la velocidad desincronización se muestra en la Hoja de datos de control. La corriente del estator seráalta durante el arranque.
b) Después de alcanzar la velocidad de sincronización, y antes de que se aplique el campo,la corriente del estator se ubicará aproximadamente entre un 40 y un 70%. El amperajede carga total y el factor de potencia registrarán un valor de retardo casi de 0.0.
c) Se aplicará el campo en un momento específico después de que se cierre el interruptordel motor, o cuando se alcance una velocidad específica, y será forzado a un niveldeterminado por los requerimientos de torque de sincronización para los dos primerossegundos. La corriente del estator se encontrará cerca de su valor nominal y el factor depotencia alcanzará casi 0.0 de avance.
d) Después de que culmine el período de forzamiento, la corriente en el estator descenderáy el factor de potencia permanecerá en avance, aunque de alguna manera estará máscerca de la unidad. El comportamiento de la corriente del estator será ahora como semuestra en el manual de instrucciones TPP-7512-P3. El factor de potencia realdependerá del ajuste del campo. Si la corriente de campo se fija para obtener unacorriente de estator mínima (véase la curva “V” del motor), el factor de potencia seubicará cerca de 1.0. Si la corriente de campo es mayor que el valor que produce unacorriente de estator mínima, el factor de potencia se encontrará en avance y será menor.
Si la fijación de la corriente mínima (véase la configuración de parámetros de la subrutina SYSSU) se bajaun poco, le permitirá ajustar la corriente de campo por debajo de este punto mínimo en la curva “V”. Estaacción dará como resultado un incremento en la corriente del estator mientras se disminuye la corriente decampo. Al mismo tiempo, el factor de potencia se retardará y se hará menor. Esto puede ocurrir de maneraabrupta en ausencia de carga.
El comportamiento del motor que se ha descrito depende de las leyes de la física y no cambia. Lo que sípuede cambiar son las indicaciones que usted observe en los instrumentos. Si se encuentran conectadoscorrectamente, los instrumentos mostrarán el mismo comportamiento que se ha descrito anteriormente.
Si el comportamiento del factor de potencia es correcto, excepto que las indicaciones de avance y retardoson EXACTAMENTE inversas a la descripción anterior, entonces la polaridad de CT se invierte. Existen

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
otras posibilidades de conexión las cuales producirán una indicación errada del factor de potencia. Si elproblema no puede ser detectado fácilmente, será necesario deshacer el anillo del cableadocuidadosamente. Si tiene un probador de secuencia de fase, asegúrese de que la secuencia de fase en elPT secundario sea A-B-C.
Si se corrige la operación de la función Slipguard permutando los cables en los terminales del control de laexcitatriz, en lugar de corregir el problema desde su raíz se corre el riesgo de que alguien en el futuropueda corregir el problema original. Esto hará que ese arreglo de “remiendo” resulte inútil y que el sistemade arranque no funcione.
Es indispensable que el factor de potencia muestre la indicación adecuada para proteger el motorde fallas futuras y de sobrecargas. GE no puede hacerse responsable del equipo a menos que estafunción esté operando adecuadamente antes de conectar cualquier carga.
5.6 Requerimientos mínimos para plena operación (control VAr)
Para utilizar el control VAr, las señales de retroalimentación provenientes del transductor Watt/VAr debenser correctas. La conexión utilizada por el control produce +10.0V de retroalimentación hacia la entradaanalógica para los valores de VAr de avance máximo del transductor. (Relación de CT x relación de PT x1.000). Este valor se logra utilizando un transductor -1ma/0/+1ma que opere dentro de la resistencia deescala de 10.000 ohmios en el módulo analógico. Los ajustes del PLC para el motor específico sonutilizados para llevar la retroalimentación a la escala de acuerdo con el kVA del motor. Una operaciónadecuada depende de una retroalimentación correcta, y ésta depende a su vez de las conexionesadecuadas de CT y PT hacia el transductor, en virtud de lo que se ha mencionado anteriormente.
Con el motor sincronizado y en funcionamiento sin carga, las retroalimentaciones de Watt y VAr pueden sersupervisadas en la OIU para asegurar que las conexiones sean correctas, antes de intentar la regulacióndel lazo VAr cerrado. Estas señales son supervisadas mediante la medición de las señales de miliamperiosdisponibles en el bloque terminal del control. Observe la convención de polaridad que se muestra en eldiagrama básico. Igualmente, mientras no haya carga en el motor, se permite la operación del mismo conun factor de potencia ligeramente retardado sin temor a que se produzca un deslizamiento del polo. Enconsecuencia, se permite disminuir temporalmente el ajuste de límite inferior de la referencia de la corrientede campo mediante el uso de la OIU (Véase PGEI 5295 – Control ESP1, Manual del usuario).
Ajuste la corriente de campo hasta obtener el valor mínimo para la corriente del estator. En este momento,la señal de VAr debería aproximarse al valor cero y el factor de potencia debería ser cercano a 1.0. Si laseñal de VAr no se aproxima al valor cero, las conexiones hacia CT y PT son incorrectas o el transductorestá defectuoso. Si la señal es incorrecta, una pista para detectar el error podría obtenerse cortocircuitandodirectamente una de las entradas de CT en el transductor. Cuando se ha cortocircuitado CT3, entoncesCT1 queda suministrando la señal por sí sola. En este caso, la señal VAr mostrará un valor de avancemoderadamente alto. Asimismo, si CT1 es cortocircuitada, la señal de VAr mostrará una señal de retardoigualmente alta. La señal Watt registrará un valor muy bajo, normalmente entre 1 y 3% del valor nominal dekW del motor.
Ajuste la corriente de campo al valor máximo. Esto producirá una corriente alta del estator, normalmente de50 a 90% del amperaje nominal de carga total. La señal VAr será mayor y positiva, y la señal Watt en eltransductor permanecerá en un valor aproximado a cero. Bajo estas condiciones de corriente de campo, laseñal de retroalimentación de VAr debería descender a aproximadamente la mitad de su valor cuandocualquiera de las entradas de CT del transductor sean cortocircuitadas directamente. El cortocircuitaje deCT1 provocará un cambio moderado en la salida de Watt del transductor. Un cambio de salida normal

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
podría ser un 20% del valor de kVA del motor. Por el contrario, el cortocircuitaje de CT3 producirá unapolaridad igual y opuesta a la señal Watt.
Las señales Watt y VAr pueden ser monitoreadas también en la salida del transductor. Las salidas demiliamperios están conectadas a cargas de 10 kohmios en las entradas analógicas. Las polaridades semuestran en el diagrama de elementos internos que ha sido suministrado con el equipo.
Cuando el comportamiento de la retroalimentación concuerda con la operación del motor como se hadescrito anteriormente, se permite operar el control en el modo de control VAr manual.
NO OLVIDE AJUSTAR EL LÍMITE INFERIOR DE REFERENCIA DE LA CORRIENTE DECAMPO DE NUEVO A SU VALOR NORMAL.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
5.7 Sección reservada

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
5.8 Diagrama de tiempo de la excitatriz sin escobilla “APLICACIÓ N DEL TIEMPO”
APLICACION DE CAMPO POR TEMPORIZADOR
2 4 6 8 10 12 14 16 18TIEMPONORMAL
(SEG.)Interruptor de
potencia de motor- 52
1
0
VELOCIDAD SINCRONICA% de
velocidad
0
100
0
.5
1
.5
0
El factor de potencia puede ubicarse en cualquierpunto del area sombreada. Depende de la
corriente de campo.Campo nominal
If ALTO
If BAJOFACTOR DEPOTENCIA
RETARDO
AVANCE
CORRIENTE DE CAMPO ACTIVADA
Forzamiento Corriente de campo de la excitatriz sinescobilla fijada por el control aumentar/
disminuir
2Seg FCRLL < I f < FCCONT
CORRIENTE DECAMPO
0
MAX
Permisivo detiempo desincronizacionnormalmentede 5 seg.
ACTIVACION DEFUNCION
SLIPGUARD
OK PARACARGA
2Seg
INCSsecuencia incompleta
SE MUESTRA SECUENCIA NORMAL
ACTIVACION DECAMPO
15

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
5.9 Diagrama de tiempo de la excitatriz sin escobilla “APLICACIÓ N DE LA VELOCIDAD”
2
APLICACION DE CAMPO POR SENSOR DE VELOCIDAD
4 6 8 10 12 14 16 18TIEMPOTIPICO(SEG.)
Interruptor depotencia del motor
-52
1
0
Velocidad sincronica
% de velocidad
0
100
0
.5
1
.5
0
El factor de potencia puede ubicarse en cualquierpunto del area sombreada. Depende de la corriente
de campo.Campo nominal
If ALTO
If BAJOFactor de potencia
Retardo
Avance
Corriente de campo activada
Forzamiento Corriente de campo de la excitatriz sinescobilla fijada por el control aumentar/
disminuir
2Seg. FCRLL < I f < FCCONT
Corriente de campo
0
MAX
Permisivo detiempo de
sincronizacionnormalmente de
5 seg.Activacion defuncion Slipguard
OK para carga 2Seg.
INCSSECUENCIA INCOMPLETA
SE MUESTRA SECUENCIA NORMAL
Activacion de campo
15

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
5.10 Detección y solución de fallas del sistema Rotector II
Interfaz en serie del sistema Rotector II al PLC
Cuando se aplique potencia a todos los módulos del sistema, asegúrese de que se encuentren encendidaslas luces “PWR”, “OK” y “RUN” en la parte frontal del módulo de alimentación de potencia del PLC de GEmodelo Fanuc 90-30. Esto indica que el PLC está en buenas condiciones y en funcionamiento. Si estasluces no se encienden, consulte el Manual de instalación GEK-0356 del módulo del PLC de GE modeloFanuc.
El enlace en serie del sistema Rotector II será conectado a uno de los puertos en el PLC, normalmente elpuerto P2 de la unidad CPU. Habrá una luz asociada a cada puerto serial. Asegúrese de que la luz queestá siendo utilizada por el sistema Rotector II esté titilando rápidamente (10 veces por segundo). Estoindica que la comunicación está teniendo lugar. Si la luz está titilando seis veces por segundo, el móduloRotector está tratando de acoplarse al PLC ESP1 pero no logra hacerlo. Normalmente esto significa que elmódulo Rotector no está recibendo una respuesta válida del PLC. La falla podría ser un problema deconfiguración del puerto, o una falla de hardware o cableado. Si la luz titila cada 1.5 segundos, esto indicaque el receptor del módulo Rotector no se está comunicando con los demás componentes del móduloRotector.
Si la luz está titilando muy lentamente, pero de forma continua, la configuración del puerto puede serincorrecta, o el enchufe se encuentra en el puerto errado. Consulte los datos básicos o de configuraciónque han sido suministrados como parte de las listas del PLC.
Si la luz del puerto no está titilando, pero la configuración del puerto es correcta y ha funcionado en elpasado, quizás esté fallando el módulo receptor del sistema Rotector II. Asegúrese de que el módulo estérecibiendo la potencia correcta del PLC y que el cableado es correcto antes de realizar cualquierreemplazo.
Si la luz del puerto en serie de una unidad CPU351 ó 352 hace titilar un código exactamente después delencendido, puede ser un código de diagnóstico de error y quizás no guarde ninguna relación con el enlaceen serie del sistema Rotector II.
Luces indicadoras del módulo receptor Rotector
Los receptores de Rotector, modelo BS90020, vienen equipados con un conjunto de siete luces indicadoraspara asistir en el diagnóstico de problemas. Cuando se encuentran en la condición “OFF” las lucesmuestran un lente claro. Cuando están en la condición “ON” muestran los colores que se indican acontinuación.
La luz de datos “DATA” (azul) normalmente titila a una velocidad de 10/seg. para indicar que una señal dedatos está siendo recibida por el receptor Rotector del módulo de interfaz Rotector.
La luz de reloj “CLOCK” (roja) normalmente permanece constante para indicar que una buena señal dereloj está siendo recibida por el receptor Rotector del módulo de interfaz Rotector.
La luz de recepción “RECEIVE” (roja) normalmente titila a una velocidad de 10/seg. cuando el receptorRotector recibe datos provenientes del PLC ESP1.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
La luz de envío “SEND” (amarilla) normalmente titila a una velocidad de 10/seg. cuando el receptorRotector envía datos al PLC ESP1.
La luz de conexión “ATTACHED” (verde) se mantiene constante si el receptor Rotector se encuentra encomunicación constante con el PLC.
La luz de datos inválidos “BAD FRAME” (roja) normalmente está apagada, pero titilará o se mantendráconstante si ocurren períodos donde los datos recibidos del módulo de interfaz Rotector no sean válidos(posible problema de interferencia).
La luz de baja potencia “LOW POWER” (amarilla) normalmente está apagada, pero titilará o se mantendráconstante si el nivel de potencia en el módulo transmisor rotativo se encuentra por debajo del valor mínimopermitido. Cuando la potencia es muy baja o se aproxima al valor cero, está luz se aclarará. Esta luznormalmente indica una alineación de lazo o un problema del transmisor.
Alarmas del sistema Rotector II
Las alarmas del sistema Rotector indican si los módulos del sistema Rotector II presentan fallas o si haocurrido algún daño en el lazo sensor o en los componentes asociados, o si el enlace de comunicación estádañado o está siendo sometido a una interferencia de ruido sumamente alta. Es posible hacer undiagnóstico de algunos de estos problemas mediante el uso de la OIU.
En la OIU se tienen a la disposición diez pantallas para facilitar el diagnóstico de las alarmas del sistemaRotector. Estas pantallas están numeradas desde la #74 hasta la #83.
La Pantalla 74 despliega el estampado de fecha y hora de la cancelación más reciente de las alarmas delsistema Rotector. Si, mientras se observa esta pantalla, se presiona la tecla de cancelación, los contadoresde alarmas, para las pantallas 76 a 82, serán fijados en cero.
La pantalla 74 muestra que los contadores fueron cancelados el 14 de septiembre a las 11:52:21.56
La Pantalla 75 ofrece datos sobre los “latidos” (intervalo entre las comunicaciones del sistema Rotector). Eltérmino PREV se refiere al intervalo previo y debería ser de 9 ó 10 (centésimas de segundo). El términoCUR indica el tiempo transcurrido del intervalo actual y debería ser entre cero y 10.
La pantalla 75 muestra el primer temporizador de “latidos” en cero y el segundo temporizador en 1.58segundos.
La Pantalla 76 muestra el número de fallas de “latido” y el estampado de la fecha y la hora de la falla másreciente.
Last Rotec Alm CLEARMD0914 Hm1152 Sh2156
Rotec Hbeat IntervalPREV 00010 CUR 00003
Hearbeat fail #00003MD0914 Hm 1152 Sh2156

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
La pantalla 76 muestra qye se han registrado 3 intervalos de “latidos” largos desde que el contador fuecancelado y que la falla más reciente se registró el 14 de septiembre a las 11:52:21.56 (reloj de 24 horas).
Las pantallas 77 hasta 82 son muy similares a la pantalla 76 en términos de formato, aunque muestrancontadores y estampados de fecha y hora para condiciones diferentes.
La Pantalla 77 muestra el conteo para eventos con “datos por encima del rango”. Estos indican que lapotencia del transmisor Rotector ha descendido a un nivel demasiado bajo, por debajo del nivel de“subpotencia”. Las condiciones de baja potencia pueden ser una consecuencia de una mala alineaciónaxial del transmisor Rotector y el lazo sensor.
La Pantalla 78 muestra el conteo de eventos de “subpotencia”del transmisor. El nivel de subpotencia es elnivel más bajo al cual puede darse una operación confiable.
La Pantalla 79 muestra el número de veces que un “formato de datos” del módulo de interfaz no ha sidorecibido durante un período de más de 1.5 segundos. Esto puede ocurrir cuando hay una potencia baja o siexiste una seria interferencia de transmisión entre el transmisor y la interfaz.
La Pantalla 80 muestra el número de veces que persisten formatos de datos errados durante más de 1.5segundos. Dichos eventos normalmente indican una seria interferencia de la transmisión entre el transmisory la interfaz.
La Pantalla 81 muestra el número de veces que se reciben formatos sin datos del módulo de interfazdurante un período de más de 2.5 segundos; siendo posiblemente la causa una baja potencia o unainterferencia.
La Pantalla 82 muestra el conteo para los eventos de “potencia marginal” del transmisor. El nivel depotencia marginal corresponde al 150% del nivel más bajo al cual puede ocurrir una operación confiable.
La Pantalla 83 muestra un indicador de potencia del transmisor Rotector (Idiag). Para una operaciónconfiable, este número debe superar el valor de 45. Con lazos de diámetro reducido, normalmenteutilizados en los motores de alta velocidad, los valores pueden alcanzar un valor de 300+. Para lazos degrandes diámetros, normalmente utilizados en motores de baja velocidad, los valores pueden llegar hasta1.000+.
Una pantalla de temperatura Rotector en la OIU que despliegue estos símbolos **** significa que existe unacondición de alarma en el sistema Rotector. Esta indicación se alternará con una indicación de temperaturanormal.
Alarmas sin explicación
Si se presentan alarmas ocasionales que parecieran no tener ninguna razón de ser, verifique los ajustesutilizando la OIU. Las constantes de tiempo de filtro para las termocuplas deberían ser por lo menos de1.000 (0.1 seg.) y preferiblemente de 3.000. Asimismo, las constantes de tiempo de filtro para corriente decampo y voltaje deberían ser por lo menos de 5.000 (0.5 segundos) y preferiblemente de 10.000.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
5.11 Detección y solución de fallas para el Módulo PLC y la OIU
La unidad CPU del PLC está verificando continuamente cada uno de sus módulos (tarjetas). Cualquier fallaque se identifique es incluida en los cuadros de fallas de la unidad CPU. El programa de aplicación revisalas nuevas entradas en esos cuadros cada vez que realiza un barrido y cuando se identifican fallas seprocede a tomar una acción. Toda falla fatal es tratada como un evento y se incluye en el registro deeventos, se despliega en la OIU y queda disponible en los registros de fallas de enlace en serie. Las fallasfatales también disparan el control y hacen que el relé EXC READY sea desenergizado. La detección ysolución de fallas se facilita con el mensaje de alarma de la OIU, en el cual se indica el espacio o ranura delmódulo que ha fallado.
PROBLEMA CAUSA PROBABLE ACCIÓ N1. El registro de eventos de laOIU indica la falla de un módulodel PLC
Los programas de aplicación osistema han detectado una nuevaentrada en el cuadro de fallas delPLC
Cambie el módulo PLC que indicala OIU
2. La pantalla de la OIU seencuentra en blanco y el PLCcontinua funcionando
a) La OIU fue fijada con unapantalla en blanco utilizando latecla de modo “MODE”b) La OIU ha fallado
a) Presione otra tecla defunción
b) Reemplace y reconfigure laOIU
3. El campo de dato de la OIUmuestra ????, lo que indica quela OIU no se está comunicandocon el PLC.
a) Problema de cableb) Mala configuración de puertoc)Falla de puerto de la OIUd)Falla de puerto del PLC
a) Examine o reemplace el cableb)Alguien está manipulando loscontroles o reconfigurandoc)Reemplace y reconfigure la OIUd)Reemplace la alimentación depotencia del PLC.
4. La luz “RUN” del PLC no seenciende
Falla de la unidad CPU del PLC Reemplace y vuelva a cargar launidad CPU
5. La luz “BAT” está encendida Baja carga de batería Haga el reemplazo mientras semantiene la alimentación depotencia
6. La luz de puerto no estátitilando rápidamente
a)El puerto no está funcionandob)Problema de cable
a)Verifique la configuración –alguien está manipulando loscontroles.b)Examine o repare el cable

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
ANEXO A – DETALLES DE LAS CARACTERÍSTICAS
A 1.1 Convertidor de potencia estática
Convertidor de potencia tiristorizado. Este equipo convierte la potencia de entrada monofásica enpotencia DC para el campo de la excitatriz. El convertidor recibe un voltaje nominal de 155VAC del voltajesecundario del transformador instalado por separado. Este valor es convertido, mediante el uso de tiristoresclasificados de forma conservadora y diodos, en un valor DC variable que puede oscilar entre 0 y 140 VDCnominal. Los circuitos de activación de entrada para los tiristores se encuentran en la tarjeta de control621L512.
Transformador de aislamiento (estándar). Este transformador tiene voltajes primarios dobles de 120VAC, 1PH, 50/60 Hz y se suministra con un cable para la conexión al control de excitatriz sin escobillaESP1. El transformador viene instalado por separado del control. El control y el transformador tambiénpueden ser distribuídos para varios voltajes opcionales (240, 380, 480, 575). Véase la información acontinuación.
Cuando se opere el control desde una fuente neutra conectada a tierra de 120VAC, los dos voltajesprimarios de 120V deben ser conectados en paralelo, y el lado neutro de la alimentación no deberíaprotegerse con fusible. En este caso, el fusible FU2 es reemplazado por un falso fusible, y el bloqueterminal de soporte del fusible debe sujetarse cerrado. Debe utilizarse un fusible HRC de 30A. Véase lafigura A1-1 a continuación. Esta conexión puede hacerse utilizando los puentes de cortocircuito de H1-H3 yH2-H4, en el bloque terminal H1-H4. Si la fuente es un sistema sin conexión a tierra de 120V, el fusible FU2debería ser del tipo HRC de 30A y el bloque de soporte debería quedar libre para abrirse.
(
(Opción) voltaje primario de 240, 380, 480 ó 575 VAC. Cuando se opera el control desde una fuente de240VAC, donde ninguna de las líneas es neutra, ambos lados del voltaje primario de 240V deben serprotegidos con fusible como se muestra en la Figura A1-2. Deben utilizarse dos fusibles HRC de 15A paraFU1 y 2, y el bloque de soporte del fusible para FU2 debe estar libre para operar.
Cuando la operación se haga con una fuente de 380/220VAC, donde el neutro está conectado a tierra, laconexión de la Figura A1-2 puede ser utilizada con la excepción de que FU2 debería ser un falso fusible yel bloque FU2 debería sujetarse cerrado. En el caso de otros voltajes especiales, se suministrarán untransformador especial y fusibles coordinados, y los detalles de las conexiones se mostrarán en eldiagrama básico para cada contrato específico.
H1
H2
H3
H4
120VAC
L1
NEUT
155VAC
X1
X2
H1
H2
220-240VAC
L1
L2
FU1
DUMMY
FU1
FU2
Figura A1-2
30A 15A
15A
Figura A1-1
155VAC
X2
X1
X4
X3
120VAC
PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Fusibles HRC de entrada. FU1 y FU2 deben ser del tipo HRC a menos que se tenga una proteccióncoordinada aguas arriba en la fuente.
Fuente de potencia del control. Esta fuente se deriva del voltaje primario del transformador en la versiónde 120V, aguas abajo de los fusibles FU1 y HRC. FU3 y 4 se utilizan para proteger el cableado del control.En el caso de un neutro conectado a tierra, FU4 debería ser un falso fusible.
Para otros voltajes, el transformador tendrá un voltaje secundario de 120V para control y FU4 será un falsofusible debido al voltaje de control de conexión a tierra.
A 1.2 Funciones de regulación digital
Nota: Las figuras que se muestran en esta sección han sido simplificadas de su implementación real parafacilitar las instrucciones.
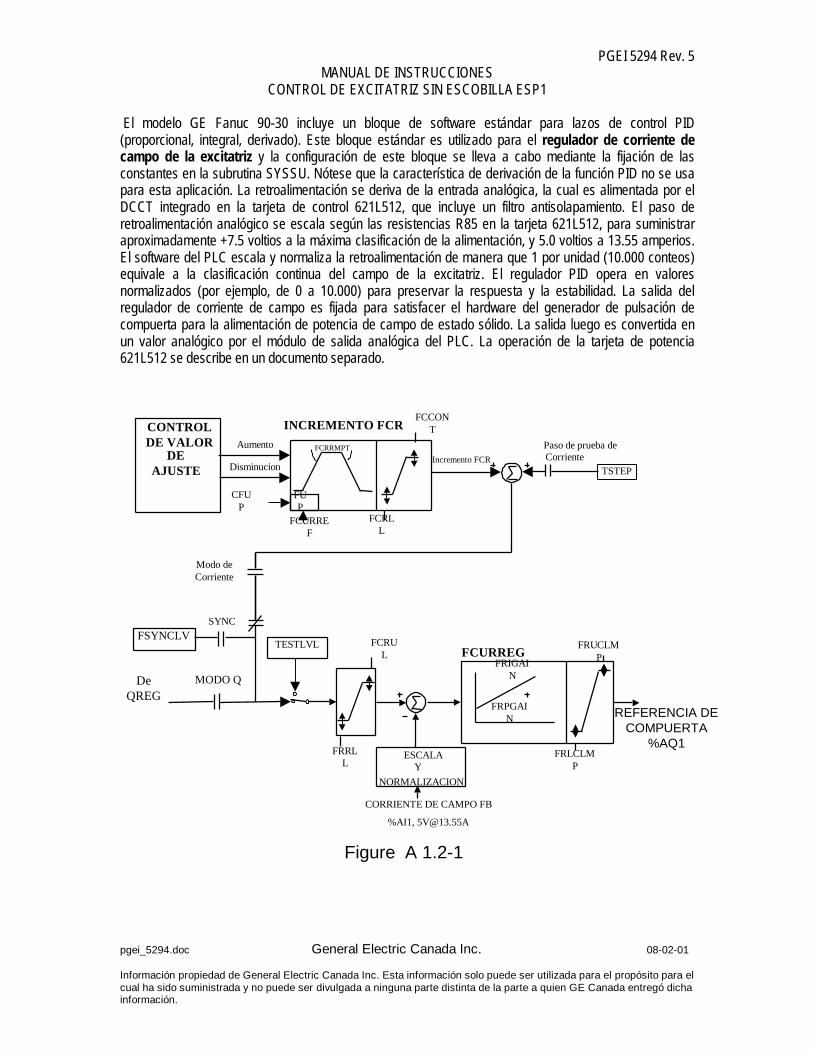
A1.2.1 Incremento manual de corriente de campo y regulador de corriente de campo P-I. (Véase laFigura A1.2-1)
El modo de operación más sencillo es el control de campo de la excitatriz desde un valor de ajuste fijo. Elvalor de ajuste se deriva de un módulo de valor de ajuste e incremento no volátil en el programa delPLC. Este incremento puede también “seguir” en otros modos de operación. La salida del incremento estásujeta a límites. La tasa de incremento y los límites se fijan en la subrutina SYSSU (configuración delsistema). Para las pruebas del regulador, puede agregarse un pequeño paso de prueba a la salida delincremento. El nivel del paso de prueba es fijado por medio de la OIU, como también ocurre con el punto enel cual se aplica el paso.
En el modo de corriente, el incremento es utilizado como referencia para el regulador de corriente decampo, excepto durante la sincronización, donde la referencia de corriente es ajustada al nivel desincronización (FSYNCLV), el cual también se ajusta en la subrutina SYSSU. Todos los niveles dereferencia para el regulador de corriente de campo son sujetos a la fijación mínima o máxima de lacorriente de campo de la excitatriz para proteger el motor y los campos de la excitatriz de posibles dañostérmicos. Estos niveles de fijación se establecen en la subrutina SYSSU y son adaptados al diseñoespecífico de la máquina.
PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
El modelo GE Fanuc 90-30 incluye un bloque de software estándar para lazos de control PID(proporcional, integral, derivado). Este bloque estándar es utilizado para el regulador de corriente decampo de la excitatriz y la configuración de este bloque se lleva a cabo mediante la fijación de lasconstantes en la subrutina SYSSU. Nótese que la característica de derivación de la función PID no se usapara esta aplicación. La retroalimentación se deriva de la entrada analógica, la cual es alimentada por elDCCT integrado en la tarjeta de control 621L512, que incluye un filtro antisolapamiento. El paso deretroalimentación analógico se escala según las resistencias R85 en la tarjeta 621L512, para suministraraproximadamente +7.5 voltios a la máxima clasificación de la alimentación, y 5.0 voltios a 13.55 amperios.El software del PLC escala y normaliza la retroalimentación de manera que 1 por unidad (10.000 conteos)equivale a la clasificación continua del campo de la excitatriz. El regulador PID opera en valoresnormalizados (por ejemplo, de 0 a 10.000) para preservar la respuesta y la estabilidad. La salida delregulador de corriente de campo es fijada para satisfacer el hardware del generador de pulsación decompuerta para la alimentación de potencia de campo de estado sólido. La salida luego es convertida enun valor analógico por el módulo de salida analógica del PLC. La operación de la tarjeta de potencia621L512 se describe en un documento separado.
REFERENCIA DECOMPUERTA
%AQ1
FUP
INCREMENTO FCRAumento
Disminucion
CFUP
FCURREF
FCRRMPT
TSTEP
Paso de prueba deCorrienteIncremento FCR
CONTROLDE VALOR
DEAJUSTE
TESTLVLFSYNCLV
SYNC
Modo deCorriente
DeQREG
MODO Q
FCRLL
FCCONT
FCRUL
FRRLL
FCURREGFRIGAI
N
FRPGAIN
FRUCLMP
FRLCLMP
ESCALAY
NORMALIZACION
CORRIENTE DE CAMPO FB
%AI1, [email protected]
Figure A 1.2-1

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
El método VAr o PF del control de potencia reactiva del estator (modo Q) constituye un modo de controlmás sofisticado. Un transductor conectado al arranque de CT o PT detecta la potencia real (kW) del estatordel motor y la potencia reactiva (kVAr).
En el modo Q, el regulador Q sirve de referencia para el regulador de la corriente de campo. Este reguladorse instala utilizando la función PID estándar del PLC. Los ajustes se realizan en la subrutina SYSSU. Laentonación de este regulador se hace en la fábrica. De ser necesario, puede modificarse la entonación,pero se recomienda que esta práctica se consulte con la fábrica o con el representante de servicios de GE.Normalmente, la respuesta del regulador Q se ajusta aproximadamente para una respuesta exponencial de1 segundo por cambio de paso en la referencia. Esta operación puede grabarse, como referencia futura,conectando un grabador de alta impedancia a la tercera entrada analógica del PLC (véase la cubierta delmódulo).
PFFB
QREG
QRPGAINRPGAIND
QRIGAIN
FCRUL
FCRLLESCALA&
NORMALIZACION
KVARFB
KVAr FB%AI3, 10V@1mA
VAREFUL
CERO
QREGOUT
FUP
INCREMENTO VARAUMENTO
DISMINUCION
QFUP
KVARFB
VARRMPT
TSTEP
PASO DE
PRUEBA Q
VARRFVM
CONTROLDE
VALORDE
AJUSTE
FUP
INCREMENTO PFAUMENTO
DISMINUCION
QFUP
PFRMPT PFRAMP
CONTROL DE
VALORDE
AJUSTE
MODOVAR
-1PFREF2
1KW *
KW
MODO PF
FUPQFUP
FCURREF
Figure A 1.2-2

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
El regulador Q puede ser forzado para que siga la referencia de corriente de campo mientras no está activo(Modo de corriente). A esto se le llama “seguimiento” (follow-up) y se abrevia FUP. Esta característicaofrece la posibilidad de una transferencia sin perturbaciones hacia el módulo Q. La retroalimentación kVArse escala y normaliza de manera que ocurran 10.000 conteos si el valor de kVAr equivale a la clasificaciónde kVA especificada en la placa de identificación de la máquina.
La referencia de kVAr para este regulador se fija entre cero y un valor mayor. La fijación a cero evita elretardo de PF, el cual, si se hace demasiado pronunciado, podría conducir a la pérdida de sincronismo bajocondiciones de carga. La fijación máxima se establece según la clasificación de la máquina. Para lasmáquinas PF de una unidad, la fijación superior permite un valor de kVAr entre 25 y 30% del valor de kVAnominal, siempre que no se exceda el valor nominal de kVA.
Puede aplicarse un paso de prueba para revisar o grabar la respuesta del regulador Q. La dimensión y elpunto de aplicación del paso de prueba se ajusta a través de la OIU y se utiliza una tecla en la OIU paraaplicar el paso. Véase el manual del usuario. La escala del paso se da en unidades normalizadas (10.000 =kVA de placa de identificación o NPKVA). Generalmente, un paso de una dimensión de ±5% (500 conteos)no perturbará los sistemas de potencia normales y ofrecerá una indicación adecuada. Asegúrese de que ladimensión o la polaridad del paso no vaya más allá del valor de kVAr fijado, o la respuesta también serálimitada.
Existen dos incrementos separados de referencia Q no volátil; uno para el control PF y el otro para elcontrol kVAr. Si se ha seleccionado el seguimiento del regulador de potencia reactiva, la referencia inactivaseguirá su propia retroalimentación, la cual es controlada por el regulador Q activo. Las tasas deincremento para cada incremento se fijan en la subrutina SYSSU y los valores de límite son establecidospor la clasificación de la máquina. Una referencia no puede colocar a la máquina en un punto de operacióninseguro. Véase la sección sobre control del valor de ajuste, así como la sección de la OIU sobreinformación acerca de cómo cambiar los valores de ajuste y los modos.
Observe que la salida del incremento PF se convierte en una referencia VAr antes de ser aplicada alregulador Q. Esto se debe a que el regulador Q es realmente un regulador kVAr y sólo usa unaretroalimentación kVAr. La relación entre la corriente de campo de la excitatriz y el valor de kVAr de lamáquina es mucho más lineal que la relación con PF. El uso de un regulador kVAr permite tener un sistemamucho más estable en un rango de operación mucho más amplio. El valor constante de PF se obtienefácilmente modificando la referencia de kVAr con respecto al kW.
A 1.2.3 Función de respuesta de carga de impacto (seleccionable)
La operación cerca del PF de unidad en un modo de control de potencia reactiva puede causar la pérdidade sincronismo si se aplica repentinamente una carga demasiado fuerte, como en el caso de las cargasembragadas. Esto se debe a que el regulador Q debilitará el campo de la máquina a una carga liviana paramantener el punto de operación. Si la carga se incrementa repentinamente, puede ocurrir un PF condemasiado retardo y llevar a la máquina más allá de su límite de estabilidad. Si la carga accionada essometida a incrementos repentinos (por ejemplo, un cambio del 50% en 2 segundos), se tienen dosestrategias posibles para evitar la pérdida de sincronismo. La primera sería hacer que el regulador Qtrabaje más rápidamente y eso se logra incrementando la velocidad de respuesta (QROMEGC) en lasubrutina SYSSU. Este enfoque tiene sus limitaciones y, cuando se lleva a los extremos, puede hacer queel regulador parezca inestable. Una segunda estrategia consiste en activar una función de respuesta decarga de impacto. Esta función reconoce el potencial de una condición de desincronización mediante ladetección de un PF negativo. Mientras esta función es detectada, el regulador Q cambia inmediatamente almodo “manual” y su salida se fija a un nivel de “”refuerzo”, el cual es normalmente equivalente al valor

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
máximo de la corriente de campo disponible. Esto lleva la máquina hacia el torque máximo disponible yprepara el regulador Q para que opere a una salida más alta. Tan pronto como el torque de la máquina essuficiente para restaurar el ángulo de carga, el PF regresará a su condición normal y la función sensora deimpacto culminará la condición de refuerzo. La característica de integración del regulador Q hará que lasalida permanezca a un valor tan alto como sea requerido para mantener el valor de ajuste de operacióncorrecto. Esta última estrategia permite que la respuesta del regulador Q sea ajustada a un valor más bajo.Sin embargo, no deberá sorprender que el campo de la máquina aumente repentinamente como respuestaa una aplicación de carga repentina. Tanto la activación de respuesta de carga de impacto como el nivel derefuerzo se fijan en la subrutina SYSSU.
A 1.2.4 Selección de modo y control del valor de ajuste
El control de la excitatriz sin escobilla ESP1 es capaz de operar en cualquiera de los tres modos de control.
1. Control de la corriente de campo de la excitatriz2. Control del kVAr del estator del motor (potencia reactiva total)3. Control del PF del estator del motor (relación de potencia real a kVa o potencia aparente)
También es capaz de aceptar transiciones de un modo a otro de una manera imperturbable utilizando lacaracterística de “seguimiento”, donde los modos inactivos siguen a los modos activos. Como es normal,hay condiciones y opciones que influyen sobre este esquema sencillo.
El modo y el valor de ajuste pueden provenir de una selección manual en la OIU o de una fuente remota.La fuente remota podrían ser las entradas analógicas y digitales del PLC o un enlace en serie como elGenius o el Modbus RTU. La lógica del modo remoto y de la selección del valor de ajuste se describen enla sección A1.6.
El proceso de selección del modo local y el valor de ajuste se explica con detalle en el manual del usuariodel control de la excitatriz sin escobilla ESP1, pero las funciones que se ofrecen son las siguientes:
Para los cambios de modo, se selecciona la pantalla de modo en la OIU por medio de la tecla de funcióndesignada. Para cambiar el valor de ajuste del modo activo, se introduce el nuevo valor de ajuste enunidades de ingeniería (por ejemplo, amperios como 4.1) y se presiona la tecla de función. La referenciadel regulador será incrementada al nuevo valor de ajuste. Si el nuevo valor se ubica por fuera del rangopermitido, titilará la palabra límite “LIMIT” y se usará el valor límite. Para cambiar el valor de ajuste de unmodo inactivo, ese modo no debe fijarse en la condición de “seguimiento”. Si no está en “seguimiento”, seutilizan el cursor y las teclas de función para seleccionar el modo en la pantalla de valores de ajuste. Luegose ingresa el nuevo valor de ajuste para ese modo en unidades de ingeniería mediante el uso de las teclasde números y la tecla ENTER. Nuevamente, la función de verificación del límite revisará que el valor nosobrepase el límite permitido.
A 1.2.5 (Opción) Control VAr en múltiples motores
Cuando se usa el control de potencia reactiva con una máquina sincrónica es posible sobreexcitar lamáquina y entonces exportar un valor de kVAr, siempre que el rango de la máquina lo permita. Este kVArexportado puede compensar otras cargas retardadas como los motores de inducción o los accionadores develocidad variable. No existe el riesgo de resonancia paralela como en el caso de los capacitores que usanla corrección de PF. Si varias máquinas tienen controles con excitatriz sin escobilla ESP1, pueden seroperados en conjunto para suministrar un kVAr de avance significativo como compensación. Se tienedisponible una función de controlador central de GE que monitorea el PF en un punto de medición central y
PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
envía órdenes de kVAr a cada máquina controlada para situar el PF de la planta dentro de una bandaestrecha cercana a la unidad.
A 1.2.6 Sistema de retroalimentación VAr redundante (uso de CT y PT de encendido)
El uso de un solo dispositivo de retroalimentación de la potencia reactiva para propósitos de protección yregulación puede causar una sobrecarga de la máquina en determinadas condiciones, si se presenta elcaso de que el dispositivo de retroalimentación falle. Además, la falla puede pasar desapercibida durantelargo tiempo, posiblemente ocasionando un daño térmico. Asimismo, el dispositivo de retroalimentaciónpuede fallar de tal forma que haga que la protección contra la desincronización no funcione. En el controlde excitatriz sin escobilla ESP1 se ha incluido un sistema redundante para detectar el PF de la máquina. Lamedición principal de la potencia real y reactiva se lleva a cabo en el transductor Watt/VAr. Desde estedispositivo, el PLC calcula continuamente el PF de la máquina. Además, un contador de alta velocidad(HSC) del PLC monitorea los cruces del cero relativo del voltaje de línea y las señales de corriente. Unprocesamiento especial de este resultado para compensar los errores de fase y las armónicas permite uncálculo independiente del PF. Estos dos valores de PF son comparados continuamente. Si se encuentrauna discrepancia considerable se activa una alarma (falla del transductor) y el modo de regulación esforzado al modo de corriente manual, de forma imperturbable, sin detener el proceso. En la OIU se tiene ala disposición una pantalla especial para monitorear los dos valores de PF. Mediante el uso de la pantallade la OIU, el operador puede declarar cualquiera de los “transductores” “OK” o “no OK”. Utilice una terceramedición del PF (posiblemente el relé de protección GE Multilin) como indicador independiente del valor dePF para determinar cuál de los transductores del control de excitatriz sin escobilla ESP1 ha fallado, y luegodeclarar ese transductor como “no OK”. Si la unidad Watt/Var está “OK”, el modo de control de la excitatrizpuede regresar al modo Q (IVAr o PF). Si el transductor HSC está “OK”, sólo será posible el uso del modomanual de la corriente de campo de la excitatriz. La protección contra la pérdida de sincronizaciónpermanece en funcionamiento con cualquiera de los transductores en la condición “OK”. Reemplace eldispositivo defectuoso lo más pronto posible y reinicialice la condición “OK”del transductor por medio de lapantalla especial de la OIU.
A 1.3 Control de encendido y funcionamiento
A 1.3.1 Inicio de operación con el uso del interlock del arranque
El control de excitatriz sin escobilla ESP1 se encuentra en interfaz con el arranque del motor mediante uninterlock del arranque (52a) y un relé de potencia de autoprotección (Exc Ready).
Si se aplica potencia al control de excitatriz sin escobilla ESP1 y se reinicializan todas las condiciones defalla, el relé Exc Ready se energiza y se cierran sus contactos N.O. Se puede utilizar un interlock de esterelé para disparar el arranque y no permitir el encendido. Todas las funciones de disparo de protección delcontrol de excitatriz sin escobilla ESP1 funcionan desenergizando el relé Exc Ready.
La entrada %I0001 se utiliza para un interlock (52a) del interruptor principal en el caso de un arranquedirecto en línea con un solo interruptor. Este interlock debería cerrarse cuando el estator del motor seaenergizado y debería permanecer cerrado hasta que el motor sea desenergizado. Cuando se utiliza unreactor o un arranque de devanado dividido, %I0001 es energizada por el interlock de interruptor RUN o eliterlock de “devanado total”. %I0002 es energizada por el interlock de interruptor START. Uno de los otrosinterlock debe cerrarse cuando el estator del motor es energizado y debería permanecer cerrado hasta queel motor sea desenergizado.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
El cierre de la entrada digital del interlock del arranque inicial indica al control que el motor ha sido puestoen línea. Se recomienda que los interlocks del arranque sólo funcionen cuando el arranque del motor seencuentra en la posición de “operación”. Si el contacto se cerrara con el arranque en la posición de“prueba”, y si el motor no se ha puesto en línea, la secuencia lógica del control disparará el arranque eindicará una condición de atascamiento, una secuencia incompleta u otra posible falla de encendido. Elcontrol también puede aplicar corriente de campo (cuando el temporizador ha iniciado su conteo) duranteunos segundos.
El interlock del arranque comenzará una secuencia lógica de encendido, la cual depende de las opcionesque hayan sido suministradas o seleccionadas. Existen dos secuencias básicas de encendido, las cualesusan ya sea un sensor de velocidad instalado en el eje del motor o un temporizador en el control deexcitatriz sin escobilla ESP1. Estas dos secuencias se ilustran en los dos diagramas de tiempo que semuestran en la sección 5.
Si el interlock del arranque no lograra cerrarse cuando el arranque es operado, el motor se disparará poruna falla del dispositivo Slipguard. Esto se debe a que la función de protección Slipguard digital se activacuando el arranque del motor se encuentra abierto. (Véase la función Slipguard de desincronización).
A 1.3.2 Aplicación de campo por sensor de velocidad del motor (si ha sido conectado)
Cuando se tiene conectado un sensor de velocidad adecuado al eje del motor y al control de la excitatriz sinescobilla ESP1, y si se ha seleccionado el modo de sensor de velocidad, el cierre del interlock del arranqueactiva la protección de detección de atascamiento y desactiva temporalmente la protección de Slipguard dedesincronización. La protección de atascamiento monitorea la velocidad del motor y el tiempo transcurrido,y compara el resultado con el perfil aceptable almacenado en el código y la memoria del programa. Eldiseñador de la máquina especifica este perfil para proteger el rotor de un aumento excesivo de latemperatura durante el encendido de inducción. Los detalles de esta protección se describen en la seccióna continuación.
La velocidad es monitoreada continuamente durante la aceleración. Cuando se alcanza la velocidad deaplicación de campo especificada, se aplica el campo de la excitatriz y se desactiva la función deatascamiento. Después de una demora nominal de 5 segundos (ajustable) para permitir que la máquina sesincronice y el sistema de potencia se regule, la función de Slipguard de desincronización queda activada.Si el campo principal ha sido aplicado con éxito, y la carga del motor no es excesiva, el factor de potenciadel estator se encontrará en avance (sobreexcitado o exportando). Después de una demora nominal de 2segundos (ajustable), el contacto del relé de salida “ready to load” se cerrará. Esto significa que la carga delproceso puede ser aplicada. El diagrama de tiempo en la sección 5.9 muestra un encendido típicoutilizando un sensor de velocidad.
A 1.3.3 Aplicación de campo por temporizador (opción seleccionable de campo)
Algunas aplicaciones permiten tiempos de aceleración cortos y constantes, sin riesgo de atascamiento parala máquina durante la secuencia de encendido. En estos casos, quizás no pueda instalarse un sensor develocidad. Si no se ha conectado un sensor de velocidad al motor, o si el sensor de velocidad estádefectuoso, y se selecciona la aplicación de campo por temporizador como una medida temporal, el campose aplicará estrictamente sobre una base de tiempo, iniciado por el interlock del arranque. Esta opción y elajuste del temporizador correspondiente pueden seleccionarse permanentemente en la subrutina SYSSU, ypor medio de la pantalla especial 01 de la OIU. En este modo no ocurrirá la protección de atascamiento pormonitoreo de velocidad. Si este método de encendido está siendo utilizado en lugar de la aplicación decampo por sensor de velocidad normal, debe monitorearse cada encendido. Una vez que el temporizador

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
culmine su conteo durante la secuencia de encendido, se aplicará el campo de la excitatriz y la secuenciacontinuará como se ha descrito anteriormente. Véase el diagrama de tiempo en la sección 5.8.
A 1.3.4 Forzamiento de la corriente de campo en el tiempo de sincronización
Cuando se aplica inicialmente el campo de la excitatriz, el valor de ajuste de la corriente es forzado a unnivel de sincronización, el cual es independiente de los valores de ajuste de operación normales. Este valorpuede ajustarse al nivel mínimo si la sincronización se lleva a cabo a un nivel muy liviano o muy cerca de laclasificación máxima del campo de la excitatriz donde se requiere mayor torque de sincronización. Elintervalo de forzamiento se fija normalmente en 2 segundos, pero puede ajustarse. El nivel de forzamientoy su duración son fijados en la subrutina SYSSU y se establecen en la fábrica.
A 1.3.5 Interlock de embrague/carga
Seguidamente del período de forzamiento descrito anteriormente, se permiten unos cuantos segundos paraque el sistema de potencia se regule, y se arme la protección digital de Slipguard de desincronización.Antes de continuar se permite una demora nominal de 2 segundos para asegurar que el motor se hayasincronizado. Al final de este período de demora, el PLC cierra un contacto de salida, “OK to load”, que leindica al proceso que el motor ha sido totalmente cargado. Este interlock debería utilizarse para permitir elcierre de los embragues o, por el contrario, dar inicio a la aplicación de carga.
A 1.3.6 (Opción) Control de voltaje reducido del arranque
Este control debe comprarse al inicio del contrato. El control para arranques de voltaje reducido, arranquesde devanado dividido o esquemas de reducción de impulso reactivo pueden ser agregados a la lógica delPLC del control de la excitatriz sin escobilla ESP1. Este dispositivo es ideal para esta tarea dada ladisponibilidad de señales de retroalimentación y por la facilidad de integración de estos esquemas con elcontrol de secuencia de encendido de la máquina. Los esquemas sencillos como los arranques dereactores o de devanado dividido pueden ajustarse dentro del espacio del panel estándar. Sin embargo, losesquemas más complejos requerirán de relés de potencia adicionales para operar los interruptores delconmutador o desconectar los interruptores. Todos esos esquemas se explican por separado en otrapublicación.
A 1.4 Funciones de protección del rotor
A 1.4.1 Función “Slipguard” digital de desincronización
Esta función se utiliza principalmente para proteger el motor de una pérdida de sincronización. El PLCmonitorea el factor de potencia (PF) sobre la base del transductor que esté siendo utilizado. Cuando seconsidera que el motor se encuentra sincronizado, y si el PF se retarda por debajo de un valor de umbral(normalmente un retardo de 0.80 PF) por encima de un tiempo establecido (normalmente de 0.25segundos), se considera inminente un deslizamiento del polo y el relé Exc Ready es desenergizado paradisparar el interruptor del motor. La función Slipguard es desactivada inmediatamente cuando el interruptordel motor se cierra y se activa una demora de tiempo después de que se ha aplicado el campo. (Véanse losdiagramas de tiempo en la Sección 5). Los valores de ajuste de la demora de activación (SGETPS), elumbral de disparo (SGTRPLV) y el preajuste de la demora de tiempo (SGTTPS) son fijados en la subrutinaSYSSU y se tiene acceso a ellos a través de la OIU. Los ajustes descritos anteriormente han demostradoser satisfactorios para una amplia gama de máquinas y de cargas conectadas. Si es necesario fijar estafunción lo más “ajustada”posible, quizás sea conveniente llevar a cabo un modelo bastante elaborado de

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
todo el sistema, o realizar una serie de pruebas a plena carga. Contacte a GE si necesita utilizar un ajustemenos conservador.
Otra característica de la función Slipguard es que vigila cualquier encendido del motor cuando el interlockdel interruptor hacia el control de la excitatriz sin escobilla ESP1 presenta fallas. Por esta razón la funciónde Slipguard permanece activada mientras el arranque está “fuera de línea”. Si el motor se encendieramientras el interlock presenta una falla, la función Slipguard no se desactivará y disparará el arranquedebido al gran impulso inductivo durante la aceleración. Igualmente, si el interlock fallara durante sufuncionamiento, se retirará la excitación, dando como resultado un PF retardado y un disparo. En muypocas ocasiones, es posible que se tenga una indicación de Slipguard justo después de que se ha abiertoel interruptor. Los supresores de sobretensión y los capacitores normales no producen este efecto. Unalógica adicional es capaz de desactivar la función Slipguard durante unos segundos después de que elinterruptor se abre por primera vez. Normalmente este tiempo se fija en un valor de cero.
A 1.4.2 Secuencia incompleta
La función de secuencia incompleta se ha heredado de controles más primitivos. Normalmente se utilizapara asegurar que se ejecute una secuencia completa dentro de los límites de tiempo. La lógica del controlde la excitatriz sin escobilla ESP1 es ejecutada en el PLC, aunque o funciona completamente o no funcionay en ese caso se produce un disparo. Cada porción de la secuencia de encendido es monitoreada yprotegida por funciones más precisas. Aunque la lógica aún existe en el sistema, está allí sencillamentepara tranquilidad de los escépticos, o para captar grandes errores durante el ajuste de los parámetros.
En el caso de la aplicación de campo por sensores de velocidad, el campo será aplicado a la velocidad desincronización, o de lo contrario se detectará una falla de atascamiento. En un momento determinadodespués de alcanzada la velocidad de sincronización se activa la función de subcorriente de campo,detectando así fallas en esa última parte de la secuencia.
En el caso de la aplicación de campo por temporizador, el campo será aplicado en un momentodeterminado después de que se inicie la secuencia de encendido. En un momento preciso después, seactiva la función de subcorriente de campo detectando así fallas en esa última parte de la secuencia.
A 1.4.3 Subexcitación o Sobreexcitación (independiente de la retroalimentación del regulador)
El control de la excitatriz sin escobilla ESP1 utiliza un amperímetro real para indicar la corriente de campode la excitatriz. Este medidor monitorea la corriente derivada directamente y es independiente de la señalde retroalimentación DCCT que es utilizada por el PLC para regular la corriente. El medidor cuenta conmonitores de nivel incorporados y de autoprotección para detectar una condición de subcorriente osobrecorriente. La detección de cualquiera de las dos fallas producirá un disparo. Los niveles de disparoson fijados directamente en el medidor y se indican en la cara del medidor por medio de señaladores omarcadores. El nivel d subcorriente normalmente se fija a un 75% del límite mínimo de la excitatriz,mientras que la sobrecorriente se fija usualmente a 120% del límite máximo de la excitatriz.
A 1.4.4 Protección contra atascamiento mediante el uso de un sensor de velocidad del motor (si hasido instalado)
Esta función es la protección primaria del rotor durante el encendido de un motor cargado y se permitenarranques más prolongados. El diseñador del motor determinará un perfil de velocidad de aceleraciónesperada con respecto al tiempo para el motor y utilizará los datos suministrados sobre el motor, la carga yel sistema de potencia. Además se creará un perfil de límite de velocidad de atascamiento con respecto al

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
tiempo para la cara del polo y las barras amortiguadoras. Normalmente existe un rango de líneas deaceleración que depende del sistema de potencia. Existe también un rango de líneas de límite deatascamiento, el cual depende de la temperatura máxima y la uniformidad de la temperatura en el rotor. Eluso de la línea más larga de aceleración del motor y la línea más corta de límite de atascamiento seconsidera una medida conservadora. Se define una tercera línea denominada línea de protección contraatascamiento del rotor que se ubica entre las dos líneas anteriores. Esta línea de protección es graficadacerca de la línea de aceleración a la velocidad cero para que se produzca un disparo rápido en condicionesde atascamiento total. Esto se hace para preservar la capacidad térmica para otro encendido, una vez queel atascamiento haya sido solucionado. Véase la Figura A 1.4-1 a continuación.
(Figura A 1.4-1)
La línea de protección contra atascamiento ha sido incluida en el software de aplicación del PLC medianteel uso de un cuadro en la subrutina SYSSU. Este cuadro contiene 7 pares de coordenadas de velocidad y
tiempo. Se usa una interpolación lineal entre los puntos en el cuadro. El último segmento de la línearepresenta el límite de tiempo de aceleración. Cuando se utiliza una resistencia de encendido en el circuitode campo del motor, para un torque adicional cerca de la velocidad de sincronización, la línea de proteccióntambién será fijada para proteger la resistencia.
A 1.4.5 Sistema de protección y monitoreo Rotector II (equipo opcional)
El sistema Rotector II para monitoreo del rotor representa el mayor avance en el monitoreo preciso y derespuesta de las variables térmicas y eléctricas para máquinas grandes sin escobilla. Este sistema tienecomponentes sensores y de telemetría instalados en la máquina, así como funciones de procesamiento,protección y despliegue que son llevadas a cabo en un PLC de GE modelo Fanuc 90-30. El PLC esnormalmente el control de excitatriz sin escobilla ESP1. El PLC recibe los datos en bruto a través de unenlace en serie desde el receptor Rotector que se encuentra instalado en la máquina. El PLC supervisa elequipo Rotector y la operación del enlace, procesa los datos en bruto, utiliza datos procesados para lasalarmas y la protección, y despliega las variables medidas del rotor en una unidad de despliegue
Linea deAceleracionmas larga
Linea de proteccioncontraatascamiento
Linea mas corta de limitede atascamiento para lapunta del polo o la barraamortiguardora
Linea mas corta delimite de atascamientopara resistencia deencendido
100%
0% Tiempo
100% VELOCIDAD DE SINCRONIZACION
VELOCIDAD DEL MOTOR
Figure A 1.4-1

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
alfanumérico interactiva (OIU). El software del PLC y la OIU se ha diseñado para que el PLC seatransparente para el usuario, de manera que no se requiere ni conocimiento ni herramientas especialespara el PLC.
Las funciones principales del sistema de monitoreo Rotector II son las siguientes:
• Comunicación, así como vigilancia, con los componentes sensores tipo Rotector que han sidoinstalados en la máquina.
• Procesamiento de las mediciones en bruto de la máquina.• Funciones de alarma y disparo para las variables críticas del rotor.• Despliegue de información térmica y eléctrica clave para el rotor de la máquina.• Óptimo bloqueo de encendido de la máquina.• Despliegue y ajuste de los parámetros del sistema.
El sistema Rotector actúa como una central de comunicaciones, mientras que el PLC se comporta como elequipo esclavo. El módulo receptor Rotector y el PLC se comunican en un enlace RS485 sencillo,completamente doble, mediante el uso de un protocolo SNP-X. El cableado físico entre ambos dispositivosse describe en un PGEI aparte, “Instalación y mantenimiento del sistema Rotector II”. La comunicación enel sistema Rotector es mucho mejor cuando el tiempo de ciclo del PLC es muy frecuente. Esto se lograutilizando un puerto PLC con acceso directo a la unidad CPU.
El protocolo SNP-X y el manejo especial de error y establecimiento de comunicaciones entre el sistemaRotector II y el PLC aseguran que sólo los datos válidos sean utilizados para propósitos de monitoreo. Seproducirá una alarma si la comunicación con el sistema Rotector presenta algún problema.
El PLC se encarga de procesar los datos en bruto que son recibidos del sistema Rotector II por dosrazones. La primera es que el sistema Rotector II es un dispositivo estándar que permite el intercambio sinnecesidad de reconfiguración. El PLC aplica una escala a los datos desde el Rotector II para hacer que losdatos sean correctos para la máquina en cuestión. En segundo lugar, los datos en bruto pueden contenermucho “ruido” dado que algunas corrientes de muy alta potencia se encuentran muy cerca de las señalesde bajo nivel que están siendo detectadas. El PLC utiliza mecanismos especiales de procesamiento yfiltrado de señales para asegurar que los datos utilizados no creen alarmas o disparos falsos.
Los parámetros a ser filtrados pueden modificarse a través de la OIU, tal y como se explica en el Manualdel operador. Los parámetros que pueden ajustarse son los siguientes:
1. Constante de tiempo de filtro de corriente principal de campo y voltaje. Rango de 0 a 3.2767segundos. Filtro de paso menor de primer orden.
2. Constante de tiempo de filtro de temperatura termocupla de jaula de amortiguador o cara del polo.Rango de 0 a 3.2767 segundos. Filtro de paso menor de primer orden.
3. Filtro de temperatura de la termocupla auxiliar. Rango de 0 a 3.2767 segundos. Filtro de pasomenor de primer orden.
NOTA: Cada máquina ha sido mejorada para su protección y su confiabilidad. Para reducir al mínimo lacomplejidad del circuito rotativo, las características del sistema Rotector II suministradas en una máquinahan sido limitadas a aquéllas que se requieren para mejorar la confiabilidad general de la máquina parasu aplicación. En consecuencia, las derivaciones que miden las corrientes sólo se suministrarán si lacorriente del campo del rotor de la máquina está siendo medida; se suministrarán termocuplas aisladasúnicamente cuando la temperatura en los dos puntos del rotor esté siendo medida directamente; y no serealizarán las conexiones al circuito de campo del rotor si se usan termocuplas no aisladas para unamedición directa de la temperatura.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
La implementación global del sistema de monitoreo y protección Rotector II incluye las siguientescaracterísticas:
• Medición y despliegue de la resistencia de conexión a tierra (campo de la máquina principal) delrotor, incluidos los ajustes de alarma y disparo opcional.
• Monitoreo y despliegue de la temperatura de la termocupla de la cara del polo del rotor o de lajaula del amortiguador, incluidos los ajustes de alarma y disparo.
• Monitoreo y despliegue de la temperatura de la segunda termocupla, incluidos los ajustes dealarma y disparo. Esta termocupla puede utilizarse en varias ubicaciones, tales como: a) respaldode la primera termocupla, b) sensor de temperatura del devanado de campo principal, c) sensor detemperatura de la resistencia de descarga (encendido), d) sensor de temperatura del bobinado dela excitatriz sin escobilla, etc.
• Detección y despliegue de la corriente del campo principal de la máquina y el voltaje.• Cálculo y despliegue de la temperatura del campo principal de la máquina, incluidos los ajustes de
alarma y disparo. El PLC utiliza el método de resistencia para medir la temperaturra promedio deldevanado.
A 1.4.6 Detección y protección térmica de la barra amortiguadora o la cara del polo (se requiere elsistema Rotector II)
Cuando el sistema de telemetría Rotector II para el rotor es conectado a la máquina, hay dos termocuplastipo K monitoreadas por el sistema y el control de excitatriz sin escobilla ESP1. La primera termocuplanormalmente se ubica en la cara del polo o en la barra amortiguadora. La segunda termocupla puedeubicarse en otro sitio de la cara del polo o la barra, o en una resistencia de encendido o en el devanado dela excitatriz, etc. Durante el encendido, la temperatura de cada termocupla es monitoreada y desplegada.Igualmente, se comparan las mediciones con los niveles de alarma y disparo que han sido ajustados en lasubrutina SYSSU. Si la temperatura supera el nivel de disparo, el relé EXC_READY es desenergizado, conlo cual debe dispararse el arranque. Además de la pequeña demora causada por el filtro, no existen otrasdemoras en ninguna de las funciones de alarma o disparo.
A 1.4.7 Indicación de falla de conexión a tierra del campo del motor y disparo o alarma (se requiereel sistema Rotector II)
La resistencia del devanado de campo principal al acero del eje es monitoreada continuamente, inclusocuando la máquina se encuentra en reposo. Los valores máximos de resistencia de falla de conexión atierra se fijan en 10 megaohmios y se indicarán en kohmios hasta el valor cero. Se utiliza un procesamientonumérico especial para el valor de la resistencia, debido a la naturaleza de “baja señal a ruido” de lainformación. Se produce una alarma si la resistencia se mantiene por debajo de un nivel de alarmaajustable durante más tiempo de la demora ajustable (normalmente 10 segundos). La alarma hace que lasalida del relé PLC NO_ALARM sea desernegizada (es decir, que existe una alarma). Normalmente el nivelde la alarma se fija a 100 kohmios.
Se define un nivel de disparo, pero se utiliza en muy raras ocasiones. Al activarse, este nivel de disparodesenergizaría el relé Exc Ready. En caso de que se utilizara, el nivel de disparo estaría fijadoaproximadamente en 50 kohmios, aunque normalmente se ajusta en un valor negativo para vencer el

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
disparo. También se define una demora para la condición de disparo y de ser utilizada se fijará enaproximadamente 20 segundos.
A 1.4.8 Indicación de temperatura del campo del motor y disparo o alarma (se requiere el sistemaRotector II)
El sistema Rotector envia señales en bruto de corriente y voltaje de campo del motor al PLC. El filtrado y laescala de las señales según los requerimientos específicos del motor se realiza en el PLC. Los resultadosson desplegados en la OIU. El voltaje y la corriente se utilizan también para calcular la resistencia delcircuito de campo completo. El “método de resistencia”, conjuntamente con los valores de resistencia a 25°C de las pruebas realizadas en la fábrica, es utilizado para calcular la temperatura promedio del circuito decampo mientras se encuentra excitado. Se ha establecido un nivel de alarma para la termperatura. Si latemperatura excede el nivel de alarma durante más de 5 segundos, la salida con el relé PLC NO_ALARMes desenergizada. Si existe una condición de alarma, y la temperatura excede el nivel de disparo, el reléEXC_READY será desenergizado para disparar el arranque. Tanto el nivel de alarma como el nivel dedisparo se establecen en la subrutina SYSSU, y pueden manipularse a través de la OIU.
A 1.4.9 Bloqueo ‘Optimal’ de rearranque de la máquina (se requiere el sistema Rotector II)
Pueden seleccionarse dos formas de bloqueo de rearranque. El sistema “Optimal” se encuentra a ladisposición únicamente cuando se ha instalado en la máquina el sistema Rotector II. También estádisponible un método “NEMA”, descrito a continuación, cuando no se ha instalado el sistema Rotector II.Cada uno de los sistemas de monitoreo de termocuplas Rotector II incluye una función que detecta elaumento de la temperatura promedio durante un encendido y es utilizado para la función “optimal” debloqueo de encendido. El aumento máximo de temperatura durante cada encendido es medido,almacenado y usado en un algoritmo de promedio. Mientras el motor se encuentra “fuera de línea”, elaumento de temperatura conocido se suma a la temperatura de termocupla medida para alcanzar así elvalor de temperatura total proyectado en caso de que se intente un encendido. Si ese valor de temperaturatotal proyectado excede el nivel de alarma de esa termocupla, se bloquea el arranque y el relé de salidaNO_START_BLOCK del PLC queda desenergizado. Este relé debería utilizarse para bloquear el encendidodel motor de manera que no coloque el motor en línea. Si se intenta un encendido mientras existe elbloqueo, el arranque se disparará. Existe un valor mínimo impuesto sobre el aumento de temperaturamedido en cada encendido. Con esto se quiere asegurar que el proceso para cálculo de promedios no seha visto afectado seriamente por un encendido sin acoplamiento. El valor mínimo es seleccionado por eldiseñador y se mantiene en la subrutina SYSSU como RISMIN1, RISMIN2.
El cálculo exacto del tiempo remanente del bloqueo de encendido es bastante complicado, dado que variasmasas térmicas distintas están en juego y cada una puede registrar un valor de temperatura diferente queademás se desconoce. Se utiliza entonces una aproximación del tiempo remanente de “una masa térmicaúnica” y el mismo es actualizado continuamente con respecto a la temperatura real. Este “tiemporemanente” es desplegado en la OIU, y se pone a la disposición de los sistemas remotos mediante unenlace en serie opcional. La predicción del tiempo remanente del bloqueo de encendido puede seroptimizada durante un encendido, si se registra una curva de enfriamiento típica para temporada caliente.Refiérase a la fábrica para más detalles al respecto.
A 1.4.10 Relé de autoseguridad (Ready) de disparo por carga pesada del arranque del motor
Cuando todas las condiciones de disparo han sido reinicializadas, y cuando el PLC de control de laexcitatriz también se encuentra en buenas condiciones, se energizará el relé EXC_READY. Este relédebería utilizarse para prevenir el encendido del motor e igualmente para disparar el arranque cuando ha

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
sido desenergizado. El relé tiene una clasificación IEC A600/P600 y puede ser utilizado directamente en loscircuitos de disparo/cierre de muchos arranques. Véase la sección sobre especificaciones para lasclasificaciones.
A 1.4.11 Bloqueo de rearranque NEMA (período entre encendidos)
NEMA define un número de encendidos y un tiempo de desaceleración entre encendidos, los cualesdependen de dónde se ubique la temperatura ambiente o la temperatura nominal del devanado del motor.El diseñador del motor definirá el número de encendidos que habrán de permitirse en cada caso,conjuntamente con los tiempos de desaceleración. Estos datos pueden hallarse en la hoja de datos decontrol para el motor. Con frecuencia, se utilizará un relé de protección del motor en caso de un malfuncionamiento (como el GE Multilin SR469) con la finalidad de bloquear el encendido cuando no se tenganinstalados el sistema Rotector y el sistema “Optimal” de bloqueo de encendido, descritos anteriormente. Enlos casos donde ninguna de esas protecciones estén disponibles, la lógica PLC del control de la excitatrizsin escobilla ESP1 contiene un sistema basado en la definición NEMA. Esta protección se activa cuando elsistema Rotector no está activado y la característica de inhibición de encendido ha sido activada en lasubrutina SYSSU.
Cuando no se utiliza la telemetría del rotor (SJROTEC no activada), se usa la lógica siguiente parabloquear el rearranque de la máquina como protección de temperatura del rotor, y se selecciona por mediode SJRSTRT en la subrutina SYSSU. Cada encendido activa un temporizador y éste debe terminar suconteo antes de que pueda permitirse otro arranque. En la OIU se mostrará el tiempo de bloqueoremanente. El intervalo del temporizador puede ser “corto”o “”largo”, dependiendo de la historia deencendido y funcionamiento. Después de enfriarse la temperatura ambiente (HAMBPS), el intervalo cortose utilizará hasta que ocurra un número específico de encendidos (NUMSHRT), o hasta que la máquinahaya permanecido en funcionamiento un tiempo suficiente para considerarla caliente (CHOTPS).Seguidamente, se permitirán unos cuantos encendidos más (NUMLONG) con el intervalo largo entre ellos.Luego se bloquearán los otros encendidos hasta que el motor sea colocado fuera de línea por HAMBPS, ohasta que se encuentre en funcionamiento por RUNSSPV. Esto permite que el rotor alcance unatemperatura de estado estacionario consistente con los intervalos corto y largo.
NormalmenteSHORTINT= 15 min NUMSHRT= 2LOGINT= 30 min NUMLONG= 32000HAMBPS= 5 horas RUNSSPV= 3 horasCHOTPS= 5 min
NOTA: Si se intenta un encendido mientras está bloqueado, el arranque se disparará.Con los ajustes descritos arriba, se permitirán 2 encendidos, con 15 minutos de tiempo intermedio, si seconsidera que el motor se encuentra a temperatura ambiente. En consecuencia, se permitirá un arranquecada 30 minutos. Con el valor de NUMLOG= 32000, el número de arranques disponibles en el intervalolargo es esencialmente infinito.
A 1.5 Interfaz del operador
A 1.5.1 Amperímetro analógico de campo integral
Se utiliza una derivación de corriente en la salida de corriente de campo de la excitatriz para alimentar elmedidor de corriente de campo de la excitatriz. Aunque el valor digital de la corriente de campo de la

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
excitatriz se encuentra a la disposición en la OIU, muchas personas prefieren una indicación analógica, eindependiente de la retroalimentación del regulador. Este medidor también contiene relés de subcorriente ysobrecorriente, los cuales se describen en la sección de protección anterior.
La derivación utilizada en el circuito de potencia es una unidad de 100mV 20A. El medidor suministradotendrá una clasificación de 10A-50mV ó 20A-100mV, dependiendo de la clasificación de la corriente decampo de la excitatriz.
A 1.5.2 Interfaz digital del operador
Las siguientes funciones se llevan a cabo mediante el uso de la OIU, la cual se encuentra instalada en laparte frontal del equipo o la cubierta. En un manual del usuario separado se describen estas característicascon mayor detalle y se trata el uso de la OIU como herramienta de interfaz principal para el control de laexcitatriz sin escobilla ESP1.
• Despliegue de la condición del control y la secuencia de la excitatriz• Modo local/remoto y selección del valor de ajuste• Comparación y condición del transductor PF• Modo local y ajuste de referencias• Despliegue digital de las variables clave (por ejemplo, corriente de campo, VAr, PF, kW, RPM,
temperaturas, etc)• Reinicialización manual del control• Registro de eventos (no volátil) con estampado de fecha y hora (opción de impresión)• Acceso al ajuste de parámetros (puede ser instalado con cambio de teclas)• Configuración de día y hora• Funciones de impresión del registro
A 1.6 Interfaz de sistema remoto
A 1.6.1 Disponibilidad de referencia VAr remota 4-20 mA
Además del modo local y de la fijación de los valores de ajuste, el control de la excitatriz sin escobilla ESP1dispone de dos formas de modo remoto y fijación del valor de ajuste. La OIU tiene una pantalla paraseleccionar el control local o remoto del modo o el valor de ajuste. Asimismo, existe la posibilidad de tenerentradas del PLC alámbricas para ser utilizadas para modo y valores de ajuste.
Para permitir el uso de cualquier forma de señales remotas, el puente de software SJREMOT de lasubrutina SYSSU debe encontrarse conectado. Si ese puente ha sido conectado, otros dos puentes desoftware determinan cómo va a seleccionarse la operación local/remoto y la fuente de las señales (modo yvalor de ajuste).
Con el remoto activado:Puente de software SJIREMS, cuando es verdadero, designa la selección local/remoto por
medio de la entrada de hardware del PLC. Cuando es falso, designa la selección local/remoto por medio de la OIU.
Puente de software SJSLINK, cuando es verdadero, designa el enlace en serie como la fuente remota. Cuando es falso, designa las entradas de hardware del PLC como

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
la fuente remota.
En todos los casos, se recomienda que el dispositivo de selección local/remoto se encuentre ubicado en elcontrol de la excitatriz. De esta manera, el operador encargado de tomar la decisión sobre la ubicación delcontrol está consciente de la condición del controlador. Cuando las entradas de hardware del PLC sondesignadas como la fuente remota, se activan tres entradas digitales (para contactos sin voltaje), una paracada modo (corriente, VAr, PF). La lógica interna de selección del modo sirve de protección contra lasselecciones de múltiple I/O (o la selcción de no I/O) reteniendo el modo anterior hasta que un nuevo y únicomodo se encuentre presente. Igualmente, se activa una entrada analógica de 4-20mA para que reciba elvalor de ajuste. La escala de la señal de 4-20 mA debe ser como se presenta a continuación:
MODO EN EFECTO ESCALACorrienteVAr
PF
4mA= 0 Exc Fld Amps, 20 mA= 1.0000 x FCACONT (clasificación continua)4mA= 0 kVAr, 20 mA= valor de kVAr en avance igual al kVA en la placa deidentificación4mA= 0 PF de avance, 20 mA= 1.0000 PF
Cuando se utiliza esta forma de control remoto, debe prestarse atención a la transferencia sinperturbaciones entre los modos, en caso de que exista esa posibilidad. Dado que el control de la excitatrizno tiene el control del modo y del valor de ajuste, la transferencia sin perturbaciones está, por definición,fuera de su control. Si se ha seleccionado la carácterística de seguimiento para todos los modos en lasubrutina SYSSU, entonces la transición inicial entre los modos será sin perturbaciones, pero un valor deajuste que difiera del valor de ajuste anterior hará que el control registre un incremento hacia el nuevo valorde ajuste.
Cuando el enlace inicial es designado como la fuente remota, es posible un ajuste similar para selección demodo y valor de ajuste. Los mismos comentarios rigen para la transferencia entre modos. En este caso, lafuente remota tiene acceso a datos tales como potencia real y reactiva, de manera que el “nuevo” valor deajuste puede ser fijado para que no registre perturbaciones.
Si requiere material de referencia para comprender y seleccionar mejor los modos de control del motorsincrónico, pida a la fábrica la nota de aplicación “Vars vs. PF, selección del mejor modo de operación delmotor sincrónico”.
A 1.6.2 (Opción) Genius, RS485 Modbus RTU, Ethernet, o GE SNP {cuando se adquiere}
Esta opción permite la comunicación de la condición, las alarmas o las fallas de disparo, así como lainformación más importante de la máquina, hacia una ubicación remota. Además, la ubicación remotapuede fijar el modo y el valor de ajuste, tal y como se describió anteriormente. Los detalles sobre la interfazen serie específica, el protocolo y las señales disponibles se discuten en un documento separado.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
ANEXO B – Asistencia del programa
La unidad CPU del PLC contiene la programación de aplicación del control de la excitatriz sin escobillaESP1, y la OIU contiene una configuración específica para este producto. Como se trata de programas conpropósitos especiales que son utilizados para controlar y proteger la máquina, GE no alienta a los usuariosa hacer cambios en el programa o la configuración. Todo cambio debe limitarse a cambios de parámetros yopciones en la subrutina de SYSSU. Otras subrutinas están bloqueadas para la edición. GE cuenta con uncódigo para eliminar el bloqueo de edición si el cliente y GE coinciden en torno a la validez de los cambiospropuestos. Dado que la programación de la aplicación contiene una amplia detección de fallas y registrode eventos, no se estima necesario monitorear la operación de la lógica con fines de detección y soluciónde fallas.
Cualquier módulo del PLC, excepto la unidad CPU, puede ser sustituido sin tener que realizar ningúnesfuerzo a nivel de la configuración. Simplemente corte la potencia, sustituya el módulo y restablezca lapotencia. Para retirar el módulo, suelte la compuerta que se encuentra debajo del mismo. Rótela haciaarriba y levántela ligeramente para soltar el gancho superior de la placa de base. El bloque terminal puedeser retirado del frente del módulo para no tener que manipular el cableado. Presione la palanca delevantamiento ubicada en la parte superior del bloque, agarre la lengüeta y tire hacia fuera. Véase elManual de Instalación GEK 0356 del PLC para los diagramas. La sustitución de la unidad CPU requiererecargar EEPROM flash cuando se restituya la potencia. Esto se hace utilizando un PC y un simpleprograma de utilidad para carga de programas y configuración y un cable suministrados con el equipo.Véase PGEI-5292 para conocer las instrucciones paso por paso. El programa de utilidad restaura elprograma a su condición original de “entrega”, de forma que si se modifica algún parámetro de la subrutinaSYSSU en el proceso de entrega al cliente, debe actualizarse el diskette. GE brindará este serviciogratuitamente para la primera revisión de la entrega del equipo. Obsérvese que la batería del PLC no tieneque conservar el programa si no hay potencia. Sólo algunos registros (como los de valores de ajuste decorriente y los de información sobre registro de eventos) se borrarán si la batería falla y se interrumpe lapotencia. Algunos de estos valores pueden ser restituidos manualmente cuando se restituye la potencia,antes de encender el motor.
Si se hace necesario sustituir la OIU, debe cargarse la aplicación de la configuración en EEPROM flash dela nueva unidad. En el mismo diskette que mencionásemos anteriormente se encuentra un programa deconfiguración y el archivo de configuración de la unidad específica. Véase TPP-9805 para conocer lasinstrucciones paso a paso.
Tanto PGEI-5292 como TPP-9805 también están incluidos en el diskette en formato de documentos Wordversión 7.
En el diskette de utilidades hay un directorio que contiene toda la lógica del programa de aplicación. Estedirectorio puede ser utilizado por un operario para, con un Logicmaster 90, modificar el programa con laanuencia de GE.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
ANEXO C – Ajuste de los parámetros de la subrutina SYSSU
Toda la programación de las aplicaciones del control de la excitatriz sin escobilla ESP1 es estándar y, conla excepción de la subrutina SYSSU o algún código personalizado adquirido para un contrato en particular,idéntica para todos los equipos con el mismo número de revisión. La revisión figura en la pantalla depublicidad de la OIU (Véase el Manual del usuario) y en el primer nivel sin comentario del programa. Lasdiferencias existentes entre las máquinas están cubiertas en los parámetros establecidos en la subrutinaSYSSU. Cada unidad es programada en la fábrica para el motor y la carga para los cuales está destinada,sobre la base del diseño del motor y los datos suministrados a GE sobre la carga accionada.
La subrutina SYSSU tiene varias subsecciones, y en las tres primeras se definen todos los parámetros. Lasubrutina no está bloqueada de ninguna forma. La primera sección es donde se colocan todos los “puentesde software”. Estos puentes son utilizados para permitir la ejecución de varias funciones o definir opciones.Aunque el usuario puede, con el software adecuado, cambiar los ajustes – valores de fábrica, no serecomienda hacerlo sin comprender a cabalidad las repercusiones y sin la aprobación de GE.
Casi todos los “puentes de software” están protegidos con codificación dura en la aplicación para que nosean volátiles, incluso sin batería. Algunos pueden cambiarse a través de la OIU, pero el valor por omisiónde estos “puentes de software” está protegido con codificación dura. Los puentes que pueden modificarse através de la OIU son los siguientes:
Declaración OK del transductorActivación de la aplicación de campo por el temporizadorActivación de la opción de la impresora del registro y alimentación de la planilla de registro denueva fecha
La segunda sección de la subrutina SYSSU es donde se definen los “datos ajustables”. Todos estos datospueden ser modificados por el usuario a través de la OIU, excepto las constantes de ajuste del regulador.Al igual que en el caso anterior, estos valores pueden ser devueltos a sus valores por omisión presionandoSHIFT-MODE-ENTER.
La tercera sección de la subrutina SYSSU contiene los “datos fijos”. Este es un conjunto de parámetros queson fijados por la clasificación y el diseño de la máquina, como la resistencia de campo y los valores de laplaca de identificación. Estos valores nunca deben ser modificados, a menos que la máquina seareclasificada.
El resto de la subrutina SYSSU se utiliza para condicionar los datos que se encuentran en las seccionesprevias. No deben modificarse por ningún concepto.
Cuando está presente el “acceso al puente” (%I0004), pueden cambiarse ciertos puentes o parámetrosa través de la OIU. Cuando el “acceso al puente” no está presente, todos los “puentes de software” yparámetros caen obligatoriamente a sus valores por omisión. Para devolver todos los parámetros a susvalores POR OMISIÓN, con el “acceso al puente” presente, presione y mantenga presionada la teclaSHIFT, presione y sostenga la tecla MODE y presione y mantenga presionada la tecla ENTER. Sueltelas teclas en el orden inverso.Este proceso de “restitución de valores por omisión” debe repertirse si se cambia o recarga la unidadCPU.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Al final de este anexo se ha incluido una impresión de una subrutina SYSSU típica. Contiene numerososcomentarios que explican cada opción o parámetro. Se han agregado notas para orientar y facilitar lacomprensión.
Los siguientes comentarios pretenden ayudar a las personas que no están familiarizadas con el formato dediagrama escalonado a comprender la lista:
El contacto ALW_ON está siempre cerrado (activo) y el contacto ALW_OFF está siempre cerrado.
El contacto DEFAULT estará siempre cerrado si el “acceso a puente” (%I0004) no está presente.
Cuando el acceso al puente está presente, el apretar SHIFT, MODE y ENTER cerrará el contactoDEFAULT.
Los bloques de función MOV_INT se utilizan para mover las constantes con codificación durahacia los registros de trabajo, cuando están activados. La red de contacto en la parte superiorizquierda del bloque de función permite el bloqueo cuando está cerrado.
Las bobinas SM son las bobinas de “ajuste” y las bobinas RM son las bobinas de “reinicialización”para el mismo relé. Son retentivas sin potencia, siempre y cuando la batería del PLC estéfuncionando adecuadamente.
Los bloques de función BLKMV_INT mueven 7 constantes a un conjunto de 7 registrosconsecutivos, cuando están activados.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page1 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
|[ START LD SUBROUTINE SYSSU ]||[ VARIABLE DECLARATIONS ]||[ START OF SUBROUTINE LOGIC ]|| SOFTWARE JUMPERS| ================| In this section, the basic system configuration is defined by selecting| or deselecting functions using software jumpers.|| (****************************************************************************)| (* SJ2LANG enables alternate language display on the Operator Interface *)| (* Unit (OIU). *)| (****************************************************************************)||ALW_OFF SJ2LANG << RUNG 5 STEP #0003 >>|%S0008 %M0100+--] [---------------------------------------------------------------------( )-- (* Enable 2nd languagedisplays *)| Cross reference for SJ2LANG| NONE|| (****************************************************************************)| (* Set SJWVTOK true if the Watt/VAr transducer and its associated analog *)| (* input hardware are healthy. *)| (****************************************************************************)||DEFAULT ALW_ON SJWVTOK << RUNG 7 STEP #0006 >>|%M0160 %S0007 %M0101+--] [--+--] [-------------------------------------------------------------(SM)- (* Watt/VAr Transducer fdbkhealthy *)| 0061 | Cross reference for SJWVTOK| |ALW_OFF SJWVTOK -(RM) 7| |%S0008 %M0101| +--] [-------------------------------------------------------------(RM)- (* Watt/VAr Transducer fdbkhealthy *)| Cross reference for SJWVTOK| -(SM) 7|| (****************************************************************************)| (* Set SJHSCOK true if the High Speed Counter module and its associated *)| (* hardware are healthy. *)| (****************************************************************************)||DEFAULT ALW_ON SJHSCOK << RUNG 9 STEP #0014 >>|%M0160 %S0007 %M0102+--] [--+--] [-------------------------------------------------------------(SM)- (* High Speed Counter fdbkhealthy *)| 0061 | Cross reference for SJHSCOK| |ALW_OFF SJHSCOK -(RM) 9| |%S0008 %M0102| +--] [-------------------------------------------------------------(RM)- (* High Speed Counter fdbkhealthy *)| Cross reference for SJHSCOK| -(SM) 9|| (****************************************************************************)| (* SJMOBUS enables the Modbus interface (if present). *)| (* Note that SJSLINK and SJREMOT must be enabled to use the serial link *)| (* for remote control. *)| (****************************************************************************)||ALW_OFF SJMOBUS << RUNG 11 STEP #0022 >>|%S0008 %M0103+--] [---------------------------------------------------------------------( )-- (* Enable Modbus interface*)| Cross reference for SJMOBUS| -] [- 15|| (****************************************************************************)| (* SJREMOT permits selection between local and remote control of mode *)| (* selection and setpoint. *)| (****************************************************************************)||ALW_OFF SJREMOT << RUNG 13 STEP #0025 >>|%S0008 %M0098+--] [---------------------------------------------------------------------( )-- (* Enable Local/Remotecntrl select *)| Cross reference for SJREMOT| NONE|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %S0008 ALW_OFF %M0102 SJHSCOK High Speed Counterfdbk healthy

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
%S0007 ALW_ON %M0103 SJMOBUS Enable Modbusinterface %M0160 DEFAULT Revert to default setup data %M0098 SJREMOT Enable Local/Remotecntrl select %M0100 SJ2LANG Enable 2nd language displays %M0101 SJWVTOK Watt/VAr Transducerfdbk healthy
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page2 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
| (****************************************************************************)| (* When SJSLINK is true, remote control signals will be received via a *)| (* serial link (provided SJMOBUS is also true). *)| (* *)| (* When SJSLINK is false, remote control signals will be received via *)| (* hardware I/O. *)| (****************************************************************************)||ALW_OFF SJMOBUS SJSLINK << RUNG 15 STEP #0028 >>|%S0008 %M0103 %M0099+--] [-----] [-------------------------------------------------------------( )-- (* Remote control viaserial link *)| 0011 Cross reference for SJSLINK| NONE|| (****************************************************************************)| (* SJIREMS enables Local/Remote selection via hardware I/O. (Otherwise, *)| (* Local/Remote selection is via the OIU). *)| (****************************************************************************)||ALW_OFF SJIREMS << RUNG 17 STEP #0032 >>|%S0008 %M0097+--] [---------------------------------------------------------------------( )-- (* Enable I/O select remotecontrol *)| Cross reference for SJIREMS| NONE|| (****************************************************************************)| (* SJTACH indicates that a motor speed pickup device is supplied for field *)| (* application as the primary synchronising mode. When there is no pickup, *)| (* field application must be by timer from the breaker closure. *)| (* *)| (* SJFAPT enables definite time field application. This option is selected *)| (* automatically when there is no pickup. (If SJFAPT is not ON, the field *)| (* will be applied using a speed feedback signal from the High Speed *)| (* Counter module). *)| (* *)| (* NOTE that SJFAPT can be set to ON via the OIU (see USER MANUAL) should *)| (* the speed feedback system fail. Stall protection is lost in this case. *)| (* *)| (* When SJTACH is set ON and SJFAPT is set ON, a tach failure alarm will *)| (* be generated on each start, to remind users to get the speed feedback *)| (* system repaired. *)| (* *)| (****************************************************************************)||ALW_ON SJTACH << RUNG 19 STEP #0035 >>|%S0007 %M0148+--] [---------------------------------------------------------------------( )-- (* Speed pickup is fitted*)| Cross reference for SJTACH| -] [- 21| -]/[- 20||ALW_ON SJTACH SJFAPT << RUNG 20 STEP #0037 >>|%S0007 %M0148 %M0104+--] [-----]/[-------------------------------------------------------------(SM)- (* Enable Fld. Applicationby Timer *)| 0019 Cross reference for SJFAPT| -(RM) 21||DEFAULT SJTACH SJFAPT << RUNG 21 STEP #0040 >>|%M0160 %M0148 %M0104+--] [-----] [-------------------------------------------------------------(RM)- (* Enable Fld. Applicationby Timer *)| 0061 0019 Cross reference for SJFAPT| -(SM) 20|| (****************************************************************************)| (* SJRSTRT enables the Restart Inhibit function. If the Rotector II is *)| (* supplied, this will use the start blocking of the Rotector. If the *)| (* Rotector is not supplied, this will enable the Restart Inhibit logic *)| (* based on timers alone. See "Machine Restart Inhibit Parameters" below. *)| (****************************************************************************)|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %S0008 ALW_OFF %M0097 SJIREMS Enable I/O selectremote control %S0007 ALW_ON %M0103 SJMOBUS Enable Modbusinterface

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
%M0160 DEFAULT Revert to default setup data %M0099 SJSLINK Remote control viaserial link %M0104 SJFAPT Enable Fld. Application by Timer %M0148 SJTACH Speed pickup isfitted
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page3 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
|ALW_ON SJRSTRT << RUNG 23 STEP #0044 >>|%S0007 %M0105+--] [---------------------------------------------------------------------( )-- (* Enable Hot RestartInhibit *)| Cross reference for SJRSTRT| NONE|| (****************************************************************************)| (* SJFPFLT enables Field Proving, which will trip the exciter if the field *)| (* current feedback fails to follow the reference. *)| (****************************************************************************)||ALW_ON SJFPFLT << RUNG 25 STEP #0047 >>|%S0007 %M0106+--] [---------------------------------------------------------------------( )-- (* Enable Field ProvingFault Trip *)| Cross reference for SJFPFLT| NONE|| (****************************************************************************)| (* SJVAR permits selection of VAr mode, which enables VAr regulation. *)| (****************************************************************************)||ALW_ON SJVAR << RUNG 27 STEP #0050 >>|%S0007 %M0107+--] [---------------------------------------------------------------------( )-- (* Enable VAr regulation*)| Cross reference for SJVAR| NONE|| (****************************************************************************)| (* SJPF permits selection of PF mode, which enables power factor *)| (* regulation. *)| (****************************************************************************)||ALW_ON SJPF << RUNG 29 STEP #0053 >>|%S0007 %M0108+--] [---------------------------------------------------------------------( )-- (* Enable power factorregulation *)| Cross reference for SJPF| NONE|| (****************************************************************************)| (* SJCFUP enables the field current reference to follow the field current *)| (* feedback when the control is not in Current mode. *)| (****************************************************************************)||ALW_ON SJCFUP << RUNG 31 STEP #0056 >>|%S0007 %M0111+--] [---------------------------------------------------------------------( )-- (* Enable current ref.follow-up *)| Cross reference for SJCFUP| NONE|| (****************************************************************************)| (* SJQFUP enables the Q regulator reference (VAr or PF) to follow the *)| (* feedback when the Q regulator is not active. *)| (* *)| (* Note: This is not normally enabled since the VAr or power factor *)| (* setpoint is usually not to be disturbed by mode changes. *)| (****************************************************************************)||ALW_ON SJQFUP << RUNG 33 STEP #0059 >>|%S0007 %M0113+--] [---------------------------------------------------------------------( )-- (* Enable Q referencefollow-up *)| Cross reference for SJQFUP| NONE|| (****************************************************************************)| (* SJKVAL enables the KVA Limit function, which lowers the VAr reference *)| (* level if KVA is greater than the machine nameplate rating. *)| (****************************************************************************)||ALW_ON SJKVAL << RUNG 35 STEP #0062 >>|%S0007 %M0115+--] [---------------------------------------------------------------------( )-- (* Enable KVA limiter*)| Cross reference for SJKVAL| NONE|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %S0007 ALW_ON %M0108 SJPF Enable power factorregulation

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
%M0111 SJCFUP Enable current ref. follow-up %M0113 SJQFUP Enable Q referencefollow-up %M0106 SJFPFLT Enable Field Proving Fault Trip %M0105 SJRSTRT Enable Hot RestartInhibit %M0115 SJKVAL Enable KVA limiter %M0107 SJVAR Enable VArregulation
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page4 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
| (****************************************************************************)| (* SJIMPAC enables Impact Speed Drop compensation, which boosts the exciter *)| (* field current if VAr's decrease to a low or negative (lagging) level *)| (* (defined by IMPACPF). *)| (****************************************************************************)||ALW_OFF SJIMPAC << RUNG 37 STEP #0065 >>|%S0008 %M0117+--] [---------------------------------------------------------------------( )-- (* Enable Impact Speed Dropcomp. *)| Cross reference for SJIMPAC| NONE|| (****************************************************************************)| (* SJTEST enables the OIU "TEST" input (F10 key) to request current while *)| (* the machine is offline and stopped. (The test current level and *)| (* duration are set by TESTLVL and TESTPS respectively). *)| (****************************************************************************)||ALW_ON SJTEST << RUNG 39 STEP #0068 >>|%S0007 %M0118+--] [---------------------------------------------------------------------( )-- (* Enable exciter currenttest step *)| Cross reference for SJTEST| NONE|| (****************************************************************************)| (* SJTSTEP enables the reference Test Step into various points in the *)| (* control system (as selected via OIU). TSTEP is the step magnitude, also *)| (* set via OIU. *)| (****************************************************************************)||ALW_ON SJTSTEP << RUNG 41 STEP #0071 >>|%S0007 %M0119+--] [---------------------------------------------------------------------( )-- (* Enable Test steps ofreference *)| Cross reference for SJTSTEP| NONE|| (****************************************************************************)| (* SJENPRN enables the Event Log Printer. This is set OFF at the factory. *)| (* However, it can be toggled on or off via the OIU. *)| (* *)| (* Note that this should be left OFF unless a printer is in use as it can *)| (* slow the normal visual display. *)| (****************************************************************************)||DEFAULT ALW_OFF SJENPRN << RUNG 43 STEP #0074 >>|%M0160 %S0008 %M0120+--] [--+--] [-------------------------------------------------------------(SM)- (* Enable Event Logprinting *)| 0061 | Cross reference for SJENPRN| |ALW_ON SJENPRN -(RM) 43| |%S0007 %M0120| +--] [-------------------------------------------------------------(RM)- (* Enable Event Logprinting *)| Cross reference for SJENPRN| -(SM) 43|| (****************************************************************************)| (* SJNDFF enables a form feed at the beginning of each new day of the event *)| (* log. This is set ON at the factory. *)| (****************************************************************************)||DEFAULT ALW_ON SJNDFF << RUNG 45 STEP #0082 >>|%M0160 %S0007 %M0121+--] [--+--] [-------------------------------------------------------------(SM)- (* Enable New Day Form Feed*)| 0061 | Cross reference for SJNDFF| |ALW_OFF SJNDFF -(RM) 45| |%S0008 %M0121| +--] [-------------------------------------------------------------(RM)- (* Enable New Day Form Feed*)| Cross reference for SJNDFF| -(SM) 45|| (****************************************************************************)| (* Provided a Rotector rotor monitoring device is installed, SJROTEC *)| (* enables the associated protective functions. *)| (****************************************************************************)|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %S0008 ALW_OFF %M0117 SJIMPAC Enable Impact SpeedDrop comp.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
%S0007 ALW_ON %M0121 SJNDFF Enable New Day FormFeed %M0160 DEFAULT Revert to default setup data %M0118 SJTEST Enable excitercurrent test step %M0120 SJENPRN Enable Event Log printing %M0119 SJTSTEP Enable Test stepsof reference
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page5 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
|ALW_ON SJROTEC << RUNG 47 STEP #0090 >>|%S0007 %M0140+--] [---------------------------------------------------------------------( )-- (* Enable Rotector software*)| Cross reference for SJROTEC| -] [-49,51,53,54,56,57,59,93,95,97,99,101,103,| 105,109,139,141|| (****************************************************************************)| (* SJRMFGP enables the Rotector Main Field Ground Protection functions. *)| (****************************************************************************)||ALW_ON SJROTEC SJRMFGP << RUNG 49 STEP #0093 >>|%S0007 %M0140 %M0145+--] [-----] [-------------------------------------------------------------( )-- (* Enable main field groundprotect *)| 0047 Cross reference for SJRMFGP| NONE|| (****************************************************************************)| (* SJRMFTP enables the Rotector Main Field Temperature Protection functions *)| (* . *)| (****************************************************************************)||ALW_ON SJROTEC SJRMFTP << RUNG 51 STEP #0097 >>|%S0007 %M0140 %M0141+--] [-----] [-------------------------------------------------------------( )-- (* Enable main field tempprotect *)| 0047 Cross reference for SJRMFTP| NONE|| (****************************************************************************)| (* SJRTC1P enables the Rotector Thermocouple #1 Temperature Protection *)| (* functions. *)| (* SJTC1TS, if set, limits trip faults to the starting interval. *)| (****************************************************************************)||ALW_ON SJROTEC SJRTC1P << RUNG 53 STEP #0101 >>|%S0007 %M0140 %M0142+--] [-----] [-------------------------------------------------------------( )-- (* Enable T/Couple #1protect fns *)| 0047 Cross reference for SJRTC1P| NONE||ALW_ON SJROTEC SJTC1TS << RUNG 54 STEP #0104 >>|%S0007 %M0140 %M0146+--] [-----] [-------------------------------------------------------------( )-- (* Enable TC1 trip onlyduring strt *)| 0047 Cross reference for SJTC1TS| NONE|| (****************************************************************************)| (* SJRTC2P enables the Rotector Thermocouple #2 Temperature Protection *)| (* functions. *)| (* SJTC2TS, if set, limits trip faults to the starting interval. *)| (****************************************************************************)||ALW_ON SJROTEC SJRTC2P << RUNG 56 STEP #0108 >>|%S0007 %M0140 %M0143+--] [-----] [-------------------------------------------------------------( )-- (* Enable T/Couple #2protect fns *)| 0047 Cross reference for SJRTC2P| NONE||ALW_ON SJROTEC SJTC2TS << RUNG 57 STEP #0111 >>|%S0007 %M0140 %M0147+--] [-----] [-------------------------------------------------------------( )-- (* Enable TC2 trip onlyduring strt *)| 0047 Cross reference for SJTC2TS| NONE|| (****************************************************************************)| (* SJREDMP enables the Rotector Exciter Diode Monitor Protection functions. *)| (* Note: Not implemented in this version. Leave OFF. *)| (****************************************************************************)||ALW_OFF SJROTEC SJREDMP << RUNG 59 STEP #0115 >>|%S0008 %M0140 %M0144+--] [-----] [-------------------------------------------------------------( )-- (* Enable Exciter diodemonitor *)| 0047 Cross reference for SJREDMP| NONE
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %S0008 ALW_OFF %M0140 SJROTEC Enable Rotectorsoftware

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
%S0007 ALW_ON %M0142 SJRTC1P Enable T/Couple #1protect fns %M0144 SJREDMP Enable Exciter diode monitor %M0143 SJRTC2P Enable T/Couple #2protect fns %M0145 SJRMFGP Enable main field ground protect %M0146 SJTC1TS Enable TC1 triponly during strt %M0141 SJRMFTP Enable main field temp protect %M0147 SJTC2TS Enable TC2 triponly during strt
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page6 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
| ADJUSTABLE DATA| ========================================================================| This section is used to set adjustable parameters used in other parts| of the program. Fixed parameters, such as nameplate values, which are| not normally subject to change are set in the separate Fixed Data| Section below.|| ================================================| *** WARNING *** PARAMETER SETUP *** WARNING ***| ================================================|| BEFORE STARTING THE MACHINE, VERIFY THAT THE REGISTERS IN THIS SECTION| ARE SET IN ACCORDANCE WITH THE CALCULATIONS FOR THIS MOTOR. THERE ARE| TWO METHODS AVAILABLE FOR PARAMETER SETUP.|| 1. PROVIDED KEYSWITCH ACCESS IS GRANTED, ENTER THE PARAMETERS USING THE| OIU. IN THIS METHOD, PARAMETERS ARE KEPT ONLY IN THE BATTERY-BACKED| RAM. FAILURE TO REPLACE A LOW BATTERY CAN RESULT IN HAVING TO| RE-ENTER PARAMETERS AFTER POWER-UP.|| 2. ENTER THE DEFAULT PARAMETER VALUES CONTAINED IN THE "MOVE" STATEMENTS| BY MAKING "DEFAULT" TRUE. THESE SETTINGS ARE SAVED, ALONG WITH THE| PROGRAM, IN THE EEPROM, AND ARE RE-LOADED ON EACH POWER-UP.|| TO MAKE "DEFAULT" TRUE, PRESS AND HOLD "SHIFT", THEN PRESS AND HOLD| "MODE" AND THEN PRESS "ENTER". RELEASE THE KEYS IN THE REVERSE| ORDER.|| DEFAULT SETTINGS MAY BE CHANGED TO "AS INSTALLED" BY USING LM90| SOFTWARE INSTALLED ON A PC, OR BY CONTACTING GE FIELD SERVICE.|| SHIFT MODE ENTER DEFAULT << RUNG 61 STEP #0119 >>|%T0093 %T0095 %T0096 %M0160+--] [-----] [-----] [--+--------------------------------------------------( )-- (* Revert to default setupdata *)| | Cross reference for DEFAULT|MODPARM | -] [-7,9,21,43,45,63,65,67,69,71,73,75,77,81,85,|%I0004 |87,89,93,95,97,99,101,103,105,109+--]/[------------------+|| (****************************************************************************)| (* Set BKRTPS = Breaker debounce timer preset [10 counts = 1.0 seconds] *)| (* Set FAPTPS = Field application timer preset [10 counts = 1.0 seconds] *)| (* (This is the field application time after breaker closing if *)| (* the field is applied by timer rather than by speed sensor) *)| (* Set RSTTPS = Reset permissive timer preset [10 counts = 1.0 seconds] *)| (* (extend time to extend reset delay after breaker open) *)| (****************************************************************************)||DEFAULT << RUNG 63 STEP #0125 >>|%M0160 +-----+ +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-----------------+MOVE_+-| 0061 | INT | | INT | | INT || | | | | | || | | BKRTPS | | FAPTPS | | RSTTPS| CONST -+IN Q+-%R0120 CONST -+IN Q+-%R0121 CONST -+IN Q+-%R0329| +00002 | LEN | +00100 | LEN | +00002 | LEN || |00001| |00001| |00001|| | | | | | || +-----+ +-----+ +-----+|| (****************************************************************************)| (* Set FAS_SPD = Speed at which main field will be applied during startup *)| (* [1 count = 1 rpm] *)| (* (See Control Data Sheet for motor) *)| (* Set FAPPDPS = Field application delay timer preset - normally zero. *)| (* This is a delay after reaching field application speed. *)| (* [10 counts = 1.0 sec] *)| (****************************************************************************)|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %R0120 BKRTPS Breaker debounce timer preset %T0095 MODE OIU MODE key %M0160 DEFAULT Revert to default setup data %I0004 MODPARM Enable parametermods from OIU %T0096 ENTER OIU ENTER key %R0329 RSTTPS Reset timer preset %R0121 FAPTPS Field application timer preset %T0093 SHIFT OIU SHIFT key
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page7 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
|DEFAULT << RUNG 65 STEP #0130 >>|%M0160 +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-| 0061 | INT | | INT || | | | || | | FAS_RPM | | FAPPDPS| CONST -+IN Q+-%R9117 CONST -+IN Q+-%R0124| +01764 | LEN | +00000 | LEN || |00001| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set FSYNCLV = Field current synchronising level *)| (* [10,000 counts = exciter field continuous current rating] *)| (* Normally set at FCRLL unless load torque is hi near sync *)| (* *)| (* Set FSYNTPS = Field current synchronising timer preset (Nominal 2 sec) *)| (* [10 counts = 1.0 seconds] *)| (* *)| (* Set BOOSTLV = Short term field overcurrent rating (Boost Level) *)| (* [10,000 counts = exciter field continuous current rating] *)| (* Normally set equal to rated current. *)| (****************************************************************************)||DEFAULT << RUNG 67 STEP #0134 >>|%M0160 +-----+ +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-----------------+MOVE_+-| 0061 | INT | | INT | | INT || | | | | | || | | FSYNCLV | | FSYNTPS | | BOOSTLV| CONST -+IN Q+-%R0126 CONST -+IN Q+-%R0127 CONST -+IN Q+-%R0128| +06000 | LEN | +00020 | LEN | +10000 | LEN || |00001| |00001| |00001|| | | | | | || +-----+ +-----+ +-----+|| (****************************************************************************)| (* Set MSCTPS = "Machine Synchronised" timer preset [10 counts = 1.0 sec] *)| (* Normally set = 2 sec *)| (* *)| (* Set INCSTPS = Incomplete sequence timer preset [10 counts = 1.0 seconds] *)| (* Normally set to longest acceleration time + 20% *)| (****************************************************************************)||DEFAULT << RUNG 69 STEP #0139 >>|%M0160 +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-| 0061 | INT | | INT || | | | || | | MSCTPS | | INCSTPS| CONST -+IN Q+-%R0129 CONST -+IN Q+-%R0130| +00020 | LEN | +00300 | LEN || |00001| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set FCPTOL = Field current proving tolerance level *)| (* [10,000 counts = continuous current rating] *)| (* Normally set to 10% of rated current *)| (* Set FCPTPS = Field current proving timer preset *)| (* [20 counts = 2.0 seconds] *)| (* Normally set to 5 seconds *)| (****************************************************************************)|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %R0128 BOOSTLV Field current boost level %R0126 FSYNCLV Field curr.synchronising level %M0160 DEFAULT Revert to default setup data %R0127 FSYNTPS Field synch. timerpreset %R0124 FAPPDPS Field applic. delay timer preset %R0130 INCSTPS Incomplete sequencetimer preset %R9117 FAS_RPM Field application speed [1=1rpm] %R0129 MSCTPS "MotorSynchronised" time preset
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page8 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
|DEFAULT << RUNG 71 STEP #0143 >>|%M0160 +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-| 0061 | INT | | INT || | | | || | | FCPTOL | | FCPTPS| CONST -+IN Q+-%R0131 CONST -+IN Q+-%R0132| +01000 | LEN | +00050 | LEN || |00001| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set SGETPS = Slipguard enable timer preset [10 counts = 1.0 seconds] *)| (* Normally set to 5 seconds *)| (* *)| (* Set SGTRPLV = Slipguard trip level. *)| (* Note: Enter negative value to specify lagging PF *)| (* [EG -8000 counts = 0.8000 PF lagging] *)| (* Normally set to -8000 *)| (* *)| (* Set SGTTPS = Slipguard trip timer preset [100 counts = 1.00 seconds] *)| (* Normally set to 0.25 seconds *)| (****************************************************************************)||DEFAULT << RUNG 73 STEP #0147 >>|%M0160 +-----+ +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-----------------+MOVE_+-| 0061 | INT | | INT | | INT || | | | | | || | | SGETPS | | SGTRPLV | | SGTTPS| CONST -+IN Q+-%R0133 CONST -+IN Q+-%R0134 CONST -+IN Q+-%R0135| +00050 | LEN | -08000 | LEN | +00025 | LEN || |00001| |00001| |00001|| | | | | | || +-----+ +-----+ +-----+|| (****************************************************************************)| (* Set IMPACPF = Impact sensing PF level *)| (* Note: Enter negative number to specify lagging PF *)| (* [EG -9800 counts = 0.9800 PF lagging] *)| (* Normally set to -9800 = 0.98PF lag *)| (* *)| (* Set IMPTMPS = Impact sensing delay preset [10 counts = 1.0 sec] *)| (* Normally set to 0.2 seconds *)| (****************************************************************************)||DEFAULT << RUNG 75 STEP #0152 >>|%M0160 +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-| 0061 | INT | | INT || | | | || | | IMPACPF | | IMPTMPS| CONST -+IN Q+-%R0136 CONST -+IN Q+-%R0137| -09800 | LEN | +00002 | LEN || |00001| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set VARRMPT = Time to ramp VAr reference from 0 to nameplate KVA *)| (* [10 counts = 10 seconds] *)| (* Normal range 10 to 20 seconds *)| (* *)| (* Set PFRMPT = Time to ramp power factor reference from 0 to 1 *)| (* [10 counts = 10 seconds] *)| (* Normal range 10 to 40 seconds *)| (****************************************************************************)|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %M0160 DEFAULT Revert to default setup data %R0137 IMPTMPS Impact sensingdelay preset %R0131 FCPTOL Field current proving tolerance %R0133 SGETPS Slipguard enabletimer preset %R0132 FCPTPS Field curr. proving timer preset %R0134 SGTRPLV Slipguard PF triplevel %R0136 IMPACPF Impact sensing PF level %R0135 SGTTPS Slipguard triptimer preset
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page9 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
|DEFAULT << RUNG 77 STEP #0156 >>|%M0160 +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-| 0061 | INT | | INT || | | | || | | VARRMPT | | PFRMPT| CONST -+IN Q+-%R0138 CONST -+IN Q+-%R0139| +00010 | LEN | +00040 | LEN || |00001| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set QROMEGC = Automatic VAr regulator crossover frequency *)| (* [10 counts = 1.0 radians/second] *)| (* Normally set to 10 = 1 radian/sec *)| (* *)| (* Set QRLEAD = Automatic VAr regulator lead time constant *)| (* [1000 counts = 1.000 sec] *)| (* Set to compensate motor T'd - see data sheet *)| (****************************************************************************)||ALW_ON << RUNG 79 STEP #0160 >>|%S0007 +-----+ +-----+ +-----++--] [---+ BLK_+---------+MOVE_+-----------------+MOVE_+-| | CLR_| | INT | | INT || | WORD| | | | ||QROMEGC | | | | QROMEGC | | QRLEAD|%R0165 -+IN | CONST -+IN Q+-%R0165 CONST -+IN Q+-%R0167| | LEN | +00010 | LEN | +00650 | LEN || |00004| |00001| |00001|| | | | | | || +-----+ +-----+ +-----+|| (****************************************************************************)| (* Set FCRLL = Field current reference lower limit *)| (* [10,000 counts = exciter field continuous current rating] *)| (* Normally set for a field current which will produce 20% *)| (* of rated stator current (kVA) at no load and 25C field *)| (* temperature. See the motor "V" curve. *)| (* *)| (* Set FCRRT = Time taken to ramp field current reference from 0 to 1 pu *)| (* [10 counts = 10 seconds] *)| (* Normally set to 20 seconds. *)| (****************************************************************************)||DEFAULT << RUNG 81 STEP #0165 >>|%M0160 +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-| 0061 | INT | | INT || | | | || | | FCRLL | | FCRRMPT| CONST -+IN Q+-%R0153 CONST -+IN Q+-%R0156| +00000 | LEN | +00020 | LEN || |00001| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set CROMEGC = Field current regulator crossover frequency *)| (* [10 counts = 1.0 radians/sec] *)| (* Normally set to 50 to 100 for 5 - 10 radians/second. *)| (****************************************************************************)|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %S0007 ALW_ON %R0139 PFRMPT Power factorreference ramp time %M0160 DEFAULT Revert to default setup data %R0167 QRLEAD VAr reg lead timeconstant %R0153 FCRLL Field current ref. lower limit %R0165 QROMEGC VAr reg crossoverfrequency %R0156 FCRRMPT Field current ref. ramp time %R0138 VARRMPT VAr reference ramptime
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)
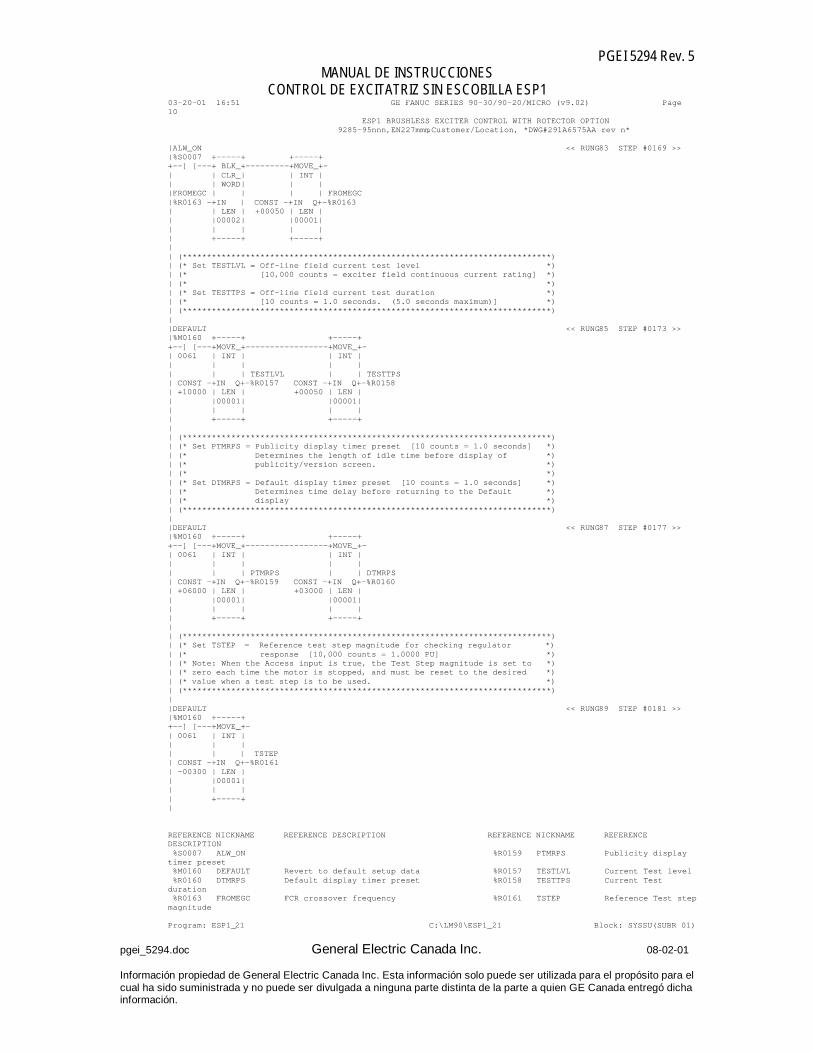
PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page10 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
|ALW_ON << RUNG 83 STEP #0169 >>|%S0007 +-----+ +-----++--] [---+ BLK_+---------+MOVE_+-| | CLR_| | INT || | WORD| | ||FROMEGC | | | | FROMEGC|%R0163 -+IN | CONST -+IN Q+-%R0163| | LEN | +00050 | LEN || |00002| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set TESTLVL = Off-line field current test level *)| (* [10,000 counts = exciter field continuous current rating] *)| (* *)| (* Set TESTTPS = Off-line field current test duration *)| (* [10 counts = 1.0 seconds. (5.0 seconds maximum)] *)| (****************************************************************************)||DEFAULT << RUNG 85 STEP #0173 >>|%M0160 +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-| 0061 | INT | | INT || | | | || | | TESTLVL | | TESTTPS| CONST -+IN Q+-%R0157 CONST -+IN Q+-%R0158| +10000 | LEN | +00050 | LEN || |00001| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set PTMRPS = Publicity display timer preset [10 counts = 1.0 seconds] *)| (* Determines the length of idle time before display of *)| (* publicity/version screen. *)| (* *)| (* Set DTMRPS = Default display timer preset [10 counts = 1.0 seconds] *)| (* Determines time delay before returning to the Default *)| (* display *)| (****************************************************************************)||DEFAULT << RUNG 87 STEP #0177 >>|%M0160 +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-| 0061 | INT | | INT || | | | || | | PTMRPS | | DTMRPS| CONST -+IN Q+-%R0159 CONST -+IN Q+-%R0160| +06000 | LEN | +03000 | LEN || |00001| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set TSTEP = Reference test step magnitude for checking regulator *)| (* response [10,000 counts = 1.0000 PU] *)| (* Note: When the Access input is true, the Test Step magnitude is set to *)| (* zero each time the motor is stopped, and must be reset to the desired *)| (* value when a test step is to be used. *)| (****************************************************************************)||DEFAULT << RUNG 89 STEP #0181 >>|%M0160 +-----++--] [---+MOVE_+-| 0061 | INT || | || | | TSTEP| CONST -+IN Q+-%R0161| -00300 | LEN || |00001|| | || +-----+|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %S0007 ALW_ON %R0159 PTMRPS Publicity displaytimer preset %M0160 DEFAULT Revert to default setup data %R0157 TESTLVL Current Test level %R0160 DTMRPS Default display timer preset %R0158 TESTTPS Current Testduration %R0163 FROMEGC FCR crossover frequency %R0161 TSTEP Reference Test stepmagnitude
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page11 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
|BKROPNP << RUNG 90 STEP #0183 >>|%M0204 +-----++--] [---+MOVE_+-| | INT || | || | | TSTEP| CONST -+IN Q+-%R0161| +00000 | LEN || |00001|| | || +-----+|| Rotector Control Parameters| ---------------------------| The following adjustable data are used only when a Rotector is| installed.|| (****************************************************************************)| (* Set GFR_ASP = Ground fault resistance alarm setpoint *)| (* [1 count = 1,000 ohms] *)| (* Normally set for 100 = 100 kOhm *)| (* *)| (* Set GFR_ATD = Ground fault resistance alarm time delay *)| (* [10 counts = 1.0 second] *)| (* Normally set for 100 = 10 seconds *)| (****************************************************************************)||DEFAULT SJROTEC << RUNG 93 STEP #0187 >>|%M0160 %M0140 +-----+ +-----++--] [-----] [---+MOVE_+-----------------+MOVE_+-| 0061 0047 | INT | | INT || | | | || | | GFR_ASP | | GFR_ATD| CONST -+IN Q+-%R1750 CONST -+IN Q+-%R1751| +00100 | LEN | +00100 | LEN || |00001| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set GFR_TSP = Ground fault resistance trip setpoint *)| (* [1 count = 1,000 ohms] *)| (* Normally set for -100 = -100 kOhm. Negative value will *)| (* disable the trip function. *)| (* *)| (* Set GFR_TTD = Ground fault resistance trip time delay *)| (* [10 counts = 1.0 second] *)| (* Normally set for 200 = 20 seconds. *)| (****************************************************************************)||DEFAULT SJROTEC << RUNG 95 STEP #0192 >>|%M0160 %M0140 +-----+ +-----++--] [-----] [---+MOVE_+-----------------+MOVE_+-| 0061 0047 | INT | | INT || | | | || | | GFR_TSP | | GFR_TTD| CONST -+IN Q+-%R1752 CONST -+IN Q+-%R1753| -00100 | LEN | +00200 | LEN || |00001| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set MFCVFTC = Main field current & voltage filter time constant *)| (* [10,000 counts = 1.0000 seconds] *)| (* Normally set for 10,000 = 1 second *)| (****************************************************************************)|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %M0204 BKROPNP Breaker open pulse %R1752 GFR_TSP GFR trip level %M0160 DEFAULT Revert to default setup data %R1753 GFR_TTD GFR trip time delay %R1750 GFR_ASP GFR alarm level %M0140 SJROTEC Enable Rotectorsoftware %R1751 GFR_ATD GFR alarm time delay %R0161 TSTEP Reference Test stepmagnitude
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page12 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
|DEFAULT SJROTEC << RUNG 97 STEP #0197 >>|%M0160 %M0140 +-----+ +-----++--] [-----] [---+ BLK_+---------+MOVE_+-| 0061 0047 | CLR_| | INT || | WORD| | || MFCVFTC | | | | MFCVFTC| %R1761 -+IN | CONST -+IN Q+-%R1761| | LEN | +10000 | LEN || |00002| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set MFTALML = Main field overtemperature alarm level *)| (* [10 counts = 1.0 degrees C] *)| (* Alarm level is usually just below rated insulation *)| (* total temperature, e.g. 1150 = 115 deg C *)| (* *)| (* Set MFTTRPL = Main field overtemperature trip level *)| (* [10 counts = 1.0 degrees C] *)| (* Trip level is usually set about 10 deg C higher than *)| (* alarm level. *)| (****************************************************************************)||DEFAULT SJROTEC << RUNG 99 STEP #0202 >>|%M0160 %M0140 +-----+ +-----++--] [-----] [---+MOVE_+-----------------+MOVE_+-| 0061 0047 | INT | | INT || | | | || | | MFTALML | | MFTTRPL| CONST -+IN Q+-%R1754 CONST -+IN Q+-%R1755| +01150 | LEN | +01250 | LEN || |00001| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set SCTALML = Squirrel cage overtemperature alarm level *)| (* [10 counts = 1.0 degree C] *)| (* Setting depends on many factors and must remain as *)| (* recommended by the motor designer. *)| (* *)| (* Set SCTTRPL = Squirrel cage overtemperature trip level *)| (* [10 counts = 1.0 degree C] *)| (* Same setting rules as above. *)| (* *)| (* Set COOL_RT = Squirrel cage cooling rate. Use the slowest rate e.g. the *)| (* cooling rate with the motor stopped and the temperature *)| (* indicating about 150 - 200 degC. *)| (* [1 count = 1 degreeC per minute] *)| (****************************************************************************)||DEFAULT SJROTEC << RUNG 101 STEP #0207 >>|%M0160 %M0140 +-----+ +-----+ +-----++--] [-----] [---+MOVE_+-----------------+MOVE_+-----------------+MOVE_+-| 0061 0047 | INT | | INT | | INT || | | | | | || | | SCTALML | | SCTTRPL | | COOL_RT| CONST -+IN Q+-%R1756 CONST -+IN Q+-%R1757 CONST -+IN Q+-%R1852| +02750 | LEN | +03000 | LEN | +00007 | LEN || |00001| |00001| |00001|| | | | | | || +-----+ +-----+ +-----+|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %R1852 COOL_RT SC cooling rate[degC/minute] %R1755 MFTTRPL Main field temptrip level %M0160 DEFAULT Revert to default setup data %R1756 SCTALML Sq Cage temp alarmlevel %R1761 MFCVFTC Main field C&V filter time const %R1757 SCTTRPL Sq Cage temp triplevel %R1754 MFTALML Main field temp alarm level %M0140 SJROTEC Enable Rotectorsoftware
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page13 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
| (****************************************************************************)| (* Set AUTALML = Auxiliary thermocouple overtemperature alarm level *)| (* [10 counts = 1.0 degree C] *)| (* Same setting rules as for SCTALML above. *)| (* *)| (* Set AUTTRPL = Auxiliary thermocouple overtemperature trip level *)| (* [10 counts = 1.0 degree C] *)| (* Same setting rules as for SCTTRPL above. *)| (* *)| (* Set TC_MAXR = Thermocouple range limit 400 or 600 degC. *)| (* [10 counts = 1.0 degree C] *)| (****************************************************************************)||DEFAULT SJROTEC << RUNG 103 STEP #0213 >>|%M0160 %M0140 +-----+ +-----+ +-----++--] [-----] [---+MOVE_+-----------------+MOVE_+-----------------+MOVE_+-| 0061 0047 | INT | | INT | | INT || | | | | | || | | AXTALML | | AXTTRPL | | TC_MAXR| CONST -+IN Q+-%R1758 CONST -+IN Q+-%R1759 CONST -+IN Q+-%R1731| +02750 | LEN | +03000 | LEN | +04000 | LEN || |00001| |00001| |00001|| | | | | | || +-----+ +-----+ +-----+|| (****************************************************************************)| (* Set IF_MAXR = Field current shunt millivolt range limit *)| (* [100 counts = 1.00 millivolt] *)| (* *)| (* Set VF_MAXR = Field voltage range limit 100 or 300 volts *)| (* [100 counts = 1.00 volts] *)| (****************************************************************************)||DEFAULT SJROTEC << RUNG 105 STEP #0219 >>|%M0160 %M0140 +-----+ +-----++--] [-----] [---+MOVE_+-----------------+MOVE_+-| 0061 0047 | INT | | INT || | | | || | | IF_MAXR | | VF_MAXR| CONST -+IN Q+-%R1733 CONST -+IN Q+-%R1732| +05000 | LEN | +30000 | LEN || |00001| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set RISMIN1 = SC thermocouple rise min clamp level *)| (* [10 counts = 1.0 degree C] *)| (* *)| (* Set RISMIN2 = Aux thermocouple rise min clamp level *)| (* [10 counts = 1.0 degree C] *)| (* *)| (* Settings depend on many factors and must remain as *)| (* recommended by the motor designer. *)| (* *)| (****************************************************************************)||ALW_ON << RUNG 107 STEP #0224 >>|%S0007 +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-| | INT | | INT || | | | || | | RISMIN1 | | RISMIN2| CONST -+IN Q+-%R1886 CONST -+IN Q+-%R1887| +01000 | LEN | +01000 | LEN || |00001| |00001|| | | | || +-----+ +-----+|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %S0007 ALW_ON %R1886 RISMIN1 Min clamp for SCtemp rise %R1758 AXTALML Aux t/couple temp alarm level %R1887 RISMIN2 Min clamp for Auxtemp rise %R1759 AXTTRPL Aux t/couple temp trip level %M0140 SJROTEC Enable Rotectorsoftware %M0160 DEFAULT Revert to default setup data %R1731 TC_MAXR Thermocouple rangemax degC x 10 %R1733 IF_MAXR Field cur range max sh mVoltx100 %R1732 VF_MAXR Field volts rangemax Volts x100
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page14 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
| (****************************************************************************)| (* Set SCTFTC = Squirrel cage thermocouple low pass filter time constant *)| (* [10,000 counts = 1.0000 seconds] *)| (* *)| (* Set AUXTFTC = Auxiliary thermocouple low pass filter time constant *)| (* [10,000 counts = 1.0000 seconds] *)| (* *)| (* Both settings are normally 3,000 = 0.3 sec. *)| (****************************************************************************)||DEFAULT SJROTEC << RUNG 109 STEP #0228 >>|%M0160 %M0140 +-----+ +-----+ +-----++--] [-----] [---+ BLK_+---------+MOVE_+-----------------+MOVE_+-| 0061 0047 | CLR_| | INT | | INT || | WORD| | | | || SCTFTC | | | | SCTFTC | | AUXTFTC| %R1763 -+IN | CONST -+IN Q+-%R1763 CONST -+IN Q+-%R1765| | LEN | +03000 | LEN | +03000 | LEN || |00004| |00001| |00001|| | | | | | || +-----+ +-----+ +-----+|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %R1765 AUXTFTC Aux T/C temp filter time const %R1763 SCTFTC Sq Cage temp filtertime const %M0160 DEFAULT Revert to default setup data %M0140 SJROTEC Enable Rotectorsoftware
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page15 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
| FIXED DATA| ========================================================================| The following data constants are fixed by the design of the machine, or| the ratings of system elements and should not be altered unless the| rating is changed physically.|| CAUTION!!! DO NOT CHANGE ANY OF THIS FIXED DATA| WITHOUT THE WRITTEN CONCURRENCE OF GE MOTORS. FAILURE TO HEED THIS| REQUIRMENT WILL AFFECT THE MOTOR WARRANTY.|| "Block Clear" commands are used where necessary to ensure that the most| significant word of those variables to be used in double precision| calculations is clear.|| (****************************************************************************)| (* Set NPKVA = Machine nameplate KVA [1000 counts = 1000 KVA] *)| (* Set NPVOLTS = Machine nameplate voltage [6000 counts = 6000 volts] *)| (****************************************************************************)||ALW_ON << RUNG 112 STEP #0235 >>|%S0007 +-----+ +-----+ +-----++--] [---+ BLK_+-----------------+ MUL_+-------------------------+MOVE_+-| | CLR_| | DINT| | INT || | WORD| | | | || NPKVA | | | | NPKVA | | NPVOLTS|%R0179 -+IN | CONST -+I1 Q+-%R0179 CONST -+IN Q+-%R0181| | LEN | +0000000060 | | +00240 | LEN || |00012| | | |00001|| | | | | | || +-----+ CONST -+I2 | +-----+| +0000000001 +-----+|| (****************************************************************************)| (* Set NPPF = Machine nameplate power factor [8000 counts = 0.8000 PF] *)| (* Set NOMFREQ = System nominal line frequency [6000 counts = 60.00 Hz] *)| (****************************************************************************)||ALW_ON << RUNG 114 STEP #0240 >>|%S0007 +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-| | INT | | INT || | | | || | | NPPF | | NOMFREQ| CONST -+IN Q+-%R0183 CONST -+IN Q+-%R0185| +08000 | LEN | +06000 | LEN || |00001| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set PTPRIMV = PT primary voltage rating ** [1000 counts = 1000 volts] *)| (* Set CTPRIMA = CT primary current rating ** [1000 counts = 1000 amps] *)| (* ** Note: Standard 120 volt & 5 amp secondaries are assumed. *)| (****************************************************************************)||ALW_ON << RUNG 116 STEP #0244 >>|%S0007 +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-| | INT | | INT || | | | || | | PTPRIMV | | CTPRIMA| CONST -+IN Q+-%R0187 CONST -+IN Q+-%R0189| +00240 | LEN | +00200 | LEN || |00001| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* Set SYNCSPD = Machine synchronous speed [1 count = 1 rpm] *)| (* Set PULPREV = Number of teeth on speed sensor wheel *)| (* [10 counts = 10 teeth = 10 pulses/rev] *)| (* Note: the MSW of SYNCSPD is set to zero for DINT calculations. *)| (****************************************************************************)|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %S0007 ALW_ON %R0183 NPPF Machine nameplatepower factor %R0189 CTPRIMA CT primary current rating %R0181 NPVOLTS Machine nameplatevoltage %R0185 NOMFREQ Nominal line frequency [100=1Hz] %R0187 PTPRIMV PT primary voltagerating %R0179 NPKVA Machine nameplate KVA
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page16 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
|ALW_ON << RUNG 118 STEP #0248 >>|%S0007 +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-| | INT | | INT || | | | || | | SYNCSPD | | PULPREV| CONST -+IN Q+-%R0202 CONST -+IN Q+-%R9059| +01800 | LEN | +00120 | LEN || |00001| |00001|| | | | || +-----+ +-----+||ALW_ON << RUNG 119 STEP #0251 >>|%S0007 +-----++--] [---+MOVE_+-| | INT || | || | | SNSPDMS| CONST -+IN Q+-%R0203| +00000 | LEN || |00001|| | || +-----+|| (****************************************************************************)| (* Set KVARPA = Machine average KVAr per exciter field amp *)| (* [1000 counts = 1000 KVAr/amp] *)| (* Set by the control designer. Change may affect stability. *)| (****************************************************************************)||ALW_ON << RUNG 121 STEP #0254 >>|%S0007 +-----+ +-----++--] [---+ BLK_+---------+MOVE_+-| | CLR_| | INT || | WORD| | ||KVARPA | | | | KVARPA|%R7053 -+IN | CONST -+IN Q+-%R7053| | LEN | +00150 | LEN || |00002| |00001|| | | | || +-----+ +-----+|| (****************************************************************************)| (* See the Instruction Manual for a sample curve, and the application *)| (* guidance notes for recommended settings. The recommendations depend on *)| (* whether the motor has a starting resistor in the field circuit. *)| (* Set up register arrays for the allowable rotor heating curve. There *)| (* are two register arrays (vectors), one for speed and one for time. Each *)| (* entry in the speed array must be matched by a corresponding entry in the *)| (* time array. These are speed-time coordinate pairs of the rotor heating *)| (* curve. This curve is specified by the machine designer, and represents *)| (* the maximum time at any speed which will produce a specified rotor *)| (* temperature rise. *)| (* SPDTABL is a length 10 vector of speed values, of which 7 are used. *)| (* The first entry MUST be zero speed, and the rest must be positive. *)| (* TIMTABL is a length 10 vector of time values, of which 7 are used. *)| (* Each entry must correspond to the associated entry in the SPDTABL. *)| (* The first point is usually chosen as zero speed and 2 seconds in order *)| (* to preserve thermal margin in the case of a complete jam. *)| (****************************************************************************)|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %S0007 ALW_ON %R0203 SNSPDMS Mach sync spd msword (dint) %R7053 KVARPA Machine KVAr per exc. field amp %R0202 SYNCSPD Machine synchronousspeed %R9059 PULPREV Speed sensor pulses/rev -dint
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)
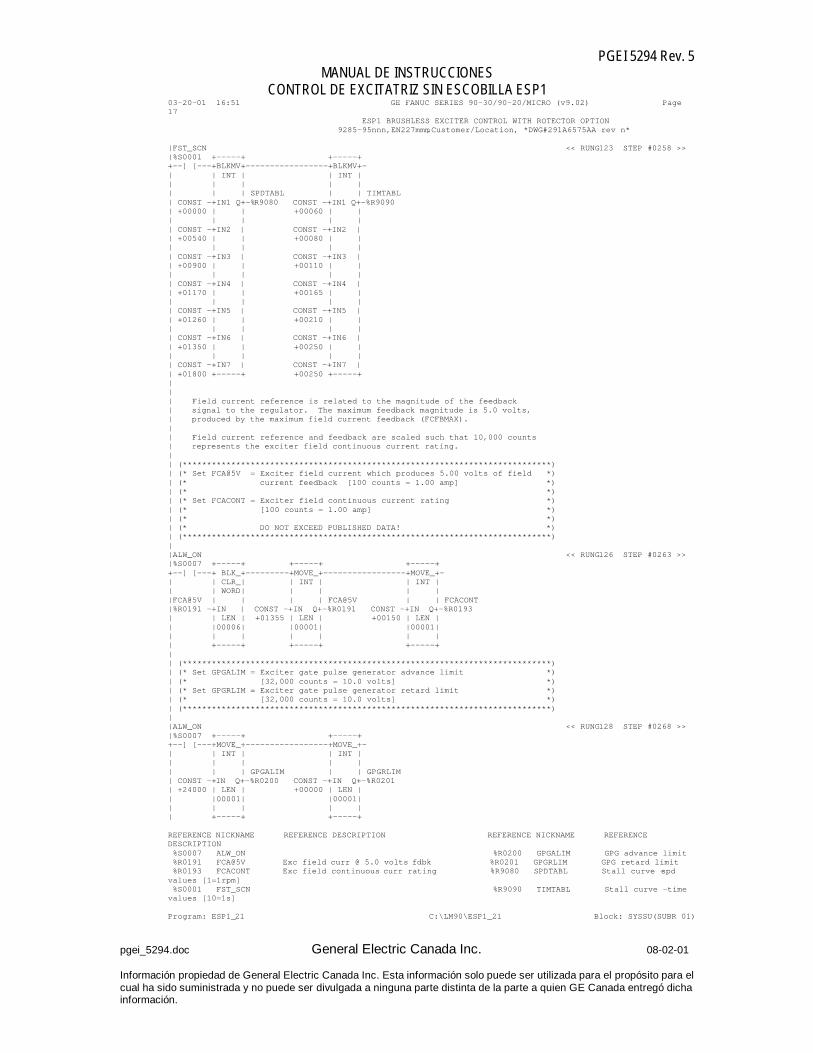
PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page17 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
|FST_SCN << RUNG 123 STEP #0258 >>|%S0001 +-----+ +-----++--] [---+BLKMV+-----------------+BLKMV+-| | INT | | INT || | | | || | | SPDTABL | | TIMTABL| CONST -+IN1 Q+-%R9080 CONST -+IN1 Q+-%R9090| +00000 | | +00060 | || | | | || CONST -+IN2 | CONST -+IN2 || +00540 | | +00080 | || | | | || CONST -+IN3 | CONST -+IN3 || +00900 | | +00110 | || | | | || CONST -+IN4 | CONST -+IN4 || +01170 | | +00165 | || | | | || CONST -+IN5 | CONST -+IN5 || +01260 | | +00210 | || | | | || CONST -+IN6 | CONST -+IN6 || +01350 | | +00250 | || | | | || CONST -+IN7 | CONST -+IN7 || +01800 +-----+ +00250 +-----+||| Field current reference is related to the magnitude of the feedback| signal to the regulator. The maximum feedback magnitude is 5.0 volts,| produced by the maximum field current feedback (FCFBMAX).|| Field current reference and feedback are scaled such that 10,000 counts| represents the exciter field continuous current rating.|| (****************************************************************************)| (* Set FCA@5V = Exciter field current which produces 5.00 volts of field *)| (* current feedback [100 counts = 1.00 amp] *)| (* *)| (* Set FCACONT = Exciter field continuous current rating *)| (* [100 counts = 1.00 amp] *)| (* *)| (* DO NOT EXCEED PUBLISHED DATA! *)| (****************************************************************************)||ALW_ON << RUNG 126 STEP #0263 >>|%S0007 +-----+ +-----+ +-----++--] [---+ BLK_+---------+MOVE_+-----------------+MOVE_+-| | CLR_| | INT | | INT || | WORD| | | | ||FCA@5V | | | | FCA@5V | | FCACONT|%R0191 -+IN | CONST -+IN Q+-%R0191 CONST -+IN Q+-%R0193| | LEN | +01355 | LEN | +00150 | LEN || |00006| |00001| |00001|| | | | | | || +-----+ +-----+ +-----+|| (****************************************************************************)| (* Set GPGALIM = Exciter gate pulse generator advance limit *)| (* [32,000 counts = 10.0 volts] *)| (* Set GPGRLIM = Exciter gate pulse generator retard limit *)| (* [32,000 counts = 10.0 volts] *)| (****************************************************************************)||ALW_ON << RUNG 128 STEP #0268 >>|%S0007 +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-| | INT | | INT || | | | || | | GPGALIM | | GPGRLIM| CONST -+IN Q+-%R0200 CONST -+IN Q+-%R0201| +24000 | LEN | +00000 | LEN || |00001| |00001|| | | | || +-----+ +-----+
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %S0007 ALW_ON %R0200 GPGALIM GPG advance limit %R0191 FCA@5V Exc field curr @ 5.0 volts fdbk %R0201 GPGRLIM GPG retard limit %R0193 FCACONT Exc field continuous curr rating %R9080 SPDTABL Stall curve -spdvalues [1=1rpm] %S0001 FST_SCN %R9090 TIMTABL Stall curve -timevalues [10=1s]
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page18 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
| (****************************************************************************)| (* Set EXFRHOT = Exciter field hot resistance [100 counts = 1.00 ohm] *)| (* Set EXFLDTC = Exciter field time constant (hot) *)| (* [1000 counts = 1.000 sec] *)| (****************************************************************************)||ALW_ON << RUNG 130 STEP #0272 >>|%S0007 +-----+ +-----+ +-----++--] [---+ BLK_+---------+MOVE_+-----------------+MOVE_+-| | CLR_| | INT | | INT || | WORD| | | | ||EXFRHOT | | | | EXFRHOT | | EXFLDTC|%R0209 -+IN | CONST -+IN Q+-%R0209 CONST -+IN Q+-%R0211| | LEN | +10000 | LEN | +00070 | LEN || |00004| |00001| |00001|| | | | | | || +-----+ +-----+ +-----+|| (****************************************************************************)| (* *)| (* ********NOT TO BE USED UNLESS THE MACHINE HAS A TRANSIENT RATING******** *)| (* *********************FOR EXCITER AND MAIN FIELD************************* *)| (* *)| (* Set RMSTIMB = Time base over which RMS field current is calculated *)| (* [10 counts = 10 seconds] *)| (* *)| (* Set OLTIMPS = Maximum time that RMS field current is permitted to exceed *)| (* the exciter field continuous current rating *)| (* [100 counts = 10.0 seconds] *)| (****************************************************************************)||ALW_ON << RUNG 132 STEP #0277 >>|%S0007 +-----+ +-----+ +-----++--] [---+ BLK_+---------+MOVE_+-----------------+MOVE_+-| | CLR_| | INT | | INT || | WORD| | | | ||RMSTIMB | | | | RMSTIMB | | OLTIMPS|%R0197 -+IN | CONST -+IN Q+-%R0197 CONST -+IN Q+-%R0199| | LEN | +00010 | LEN | +00000 | LEN || |00002| |00001| |00001|| | | | | | || +-----+ +-----+ +-----+||| NEMA Machine Restart Inhibit Parameters| ---------------------------------------| THIS LOGIC IS SUBORDINATE TO ROTECTOR START BLOCKING WHEN ENABLED.| Logic is included to enforce cooling periods before restart per NEMA| standards, and the machine nameplate.| Restart blocking is enabled by software jumper SJRSTRT.|| Normally NUMSHRT starts are allowed from ambient with SHRTINT minutes| coasting to rest between. After that, the start interval is LONGINT.| In some cases the number of hot starts may be limited. See Modeseq.|| Machine Restart Inhibit Parameters| Set CHOTPS I1 input = Run time to reach HOT from amb [1 count = 1 min]| Set HAMBPS I1 input = Hot-to-ambient cooling time before a allowing| short restart intervals. [10 counts = 1.0 hours]| Set SHRTINT = the short interval between starts for a motor at initially| at ambient [1 count = 1 minute]| Set LONGINT = the long interval between starts of a heated motor| [1 count = 1 minute]| Set NUMSHRT = the number of short interval starts permitted from ambient| Set NUMLONG = the number of long interval starts permittied before| cooling to ambient or "run until steady state" is enforced| Set RUNSSPV I1 input= continuous running time for the rotor to reach| steady state temperature and allow an immediate| restart. [10 counts = 1.0 hours]|| Typically SHORTINT = 15 MIN NUMSHRT = 2| LONGINT = 30 MIN NUMLONG = MANY (must be less than 32767)| HAMBPS = 5 HOURS RUNSSPV = 2 HOURS| CHOTPS = 10 MIN|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %S0007 ALW_ON %R0199 OLTIMPS RMS overload timerpreset %R0211 EXFLDTC Exciter fld time constant (hot) %R0197 RMSTIMB RMS calculator timebase %R0209 EXFRHOT Exciter field hot resistance
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page19 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
|ALW_ON << RUNG 134 STEP #0282 >>|%S0007 +-----+ +-----++--] [---+ MUL_+-----------------+ MUL_+-| | INT | | INT || | | | || | | CHOTPS | | H_AMBPS| CONST -+I1 Q+-%R0205 CONST -+I1 Q+-%R0206| +00010 | | +00050 | || | | | || CONST -+I2 | CONST -+I2 || +00600 +-----+ +00360 +-----+||ALW_ON << RUNG 135 STEP #0285 >>|%S0007 +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-| | INT | | INT || | | | || | | SHRTINT | | LONGINT| CONST -+IN Q+-%R0504 CONST -+IN Q+-%R0503| +00015 | LEN | +00030 | LEN || |00001| |00001|| | | | || +-----+ +-----+||ALW_ON << RUNG 136 STEP #0288 >>|%S0007 +-----+ +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-----------------+ MUL_+-| | INT | | INT | | INT || | | | | | || | | NUMSHRT | | NUMLONG | | RUNSSPV| CONST -+IN Q+-%R0498 CONST -+IN Q+-%R0505 CONST -+I1 Q+-%R0494| +00002 | LEN | +32000 | LEN | +00020 | || |00001| |00001| | || | | | | | || +-----+ +-----+ CONST -+I2 || +00360 +-----+||| Rotector Control Parameters| ---------------------------| The following non-adjustable data are used only when a Rotector is| installed.|| (****************************************************************************)| (* Set R25C10K = Main field resistance at 25 degrees C *)| (* [10,000 counts = 1.0000 ohms] *)| (* Test data should be used for best accuracy of main field *)| (* temperature calculation. *)| (* *)| (* Set FC@50MV = Main field total current at 50mV shunt voltage *)| (* [300 counts = 300 amps @ 50mV] *)| (****************************************************************************)||SJROTEC << RUNG 139 STEP #0294 >>|%M0140 +-----+ +-----+ +-----++--] [---+ BLK_+---------+MOVE_+-----------------+MOVE_+-| 0047 | CLR_| | INT | | INT || | WORD| | | | ||R25C10K | | | | R25C10K | | FC@50MV|%R1735 -+IN | CONST -+IN Q+-%R1735 CONST -+IN Q+-%R1737| | LEN | +00419 | LEN | +01500 | LEN || |00008| |00001| |00001|| | | | | | || +-----+ +-----+ +-----+|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %S0007 ALW_ON %R0498 NUMSHRT # strts allowed @short interval %R0205 CHOTPS Heatup time preset %R1735 R25C10K Main field resist @25degC x10K %R1737 FC@50MV Field current for 50mV on shunt %R0494 RUNSSPV Run till stdy statectr CV-sec %R0206 H_AMBPS Hot-to-ambient timer preset %R0504 SHRTINT Short startinterval in minutes %R0503 LONGINT Long start interval in minutes %M0140 SJROTEC Enable Rotectorsoftware %R0505 NUMLONG # starts allowed @ long interval
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
03-20-01 16:51 GE FANUC SERIES 90-30/90-20/MICRO (v9.02) Page20 ESP1 BRUSHLESS EXCITER CONTROL WITH ROTECTOR OPTION 9285-95nnn,EN227mmm,Customer/Location, *DWG#291A6575AA rev n*
| (****************************************************************************)| (* Function is not available in this version. *)| (* *)| (* Set REDOPA = Rated exciter Edo volts per exciter field amp *)| (* [1000 counts = 1.000 volts per main field amp] *)| (* *)| (* Set EXCXC = Exciter commutating reactance *)| (* [1000 counts = 1.0000 ohm] *)| (****************************************************************************)||SJROTEC << RUNG 141 STEP #0299 >>|%M0140 +-----+ +-----++--] [---+MOVE_+-----------------+MOVE_+-| 0047 | INT | | INT || | | | || | | REDOPA | | EXCXC| CONST -+IN Q+-%R1739 CONST -+IN Q+-%R1741| +00000 | LEN | +00000 | LEN || |00001| |00001|| | | | || +-----+ +-----+|
REFERENCE NICKNAME REFERENCE DESCRIPTION REFERENCE NICKNAME REFERENCEDESCRIPTION %R1741 EXCXC Exciter commutating reactance %M0140 SJROTEC Enable Rotectorsoftware %R1739 REDOPA Rated exciter Edo per field amp
Program: ESP1_21 C:\LM90\ESP1_21 Block: SYSSU(SUBR 01)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
ANEXO D – Mensajes de la unidad OIU
Observe que muchos de los mensajes de falla o alarma son enviados por las “funciones de protección delrotor”. Véase el anexo correspondiente para mayores detalles.
MENSAJES DEL REGISTRO DE EVENTOSMensaje Significado y posibles
causasNo Log Entry El registro de eventos ha sido borrado. Véase la
pantalla 4 para el estampado de la fecha y la hora.FIELD LOSS TRIP La corriente de campo de la excitatriz se encontraba
por debajo del valor de ajuste menor en el relé delmedidor. Esto puede ocurrir por una falla dehardware (por ejemplo, de compuerta) o porque setiene un circuito de campo abierto.
FLD OVERCURRENT TRIP La corriente de campo de la excitatriz se encontrabapor encima del valor de ajuste superior en el relé delmedidor. Esto puede ocurrir por un ajuste errado, uncircuito de campo corto, ajustes errados de lacorriente de campo máxima, o falla de hardware(por ejemplo, de compuerta)
STALL TRIP La aceleración del motor fue muy lenta. Esto puedeocurrir por una carga excesiva, bajo voltaje delsistema, o una curva de protección velocidad-tiempo incorrecta.
INCOMPLETE SEQ TRIP El motor no estaba “listo para la carga” antes de queel temporizador INCS terminara su conteo. Puedeser causado por un ajuste incorrecto deltemporizador.
HOT RESTART TRIP El motor fue arrancado mientras el arranque estabasiendo bloqueado por el sistema Rotector (cuandoel sistema Rotector ha sido activado) o antes de quese hubiese cumplido la demora de rearranqueobligatoria (cuando el sistema Rotector no ha sidoactivado).
FIELD PROVING TRIP La referencia de la corriente de campo de laexcitatriz y la retroalimentación fueron desajustadaspor encima de la tolerancia permitida durantemucho tiempo. Véanse las pantallas 20 y 21 paralos ajustes. Esto puede ocurrir por una entonacióndeficiente del regulador de corriente, por una fallade un componente de potencia o por una falla de laretroalimentación (DCCT o entrada analógica).
SLIPGUARD TRIP El PF del motor registraba un retardo mayor que elnivel de disparo por un tiempo mayor que el valor dela demora de disparo. Véanse las pantallas 23 y 24para los ajustes. Véase además la sección sobre

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
“Detección y solución de fallas”.DATA ERROR TRIP Causado por un error matemático en el programa
del PLC. La causa más probable son cambiosincorrectos en la programación.
SLOT 2 I/O BAD TRIP La tarjeta de entrada digital del PLC ha fallado.Debe cambiar el módulo.
SLOT 3 I/O BAD TRIP La tarjeta de salida digital del PLC ha fallado. Debecambiar el módulo.
SLOT 8 I/O BAD TRIP El módulo de I/O analógica ha fallado. Debecambiar el módulo.
LOW GND RESIST TRIP La resistencia del campo del motor al eje seencuentra por debajo del ajuste para disparo. Esteajuste es fijado normalmente en un valor negativopara vencer cualquier de esos disparos, pero si laindicación persiste puede ser una razón parapreocuparse. Véase la pantalla 62.
MAIN FIELD O/TEMP TRIP La temperatura del campo del motor, calculada porel método de resistencia, está por encima del nivelde disparo. Véase la pantalla 66. Esto puede ocurrirpor un enfriamiento incorrecto, por un valorincorrecto para R25C10K en la subrutina SYSSU, opor una falla en la entrada analógica del sistemaRotector, como es el caso del cableado.
SQ CAGE O/TEMP TRIP La temperatura del dispositivo Rotector T/C #1 esmayor que el valor de ajuste para disparo. Véase lapantalla 68. Puede ocurrir por una temperaturaexcesiva durante el arranque. Revise la posibilidadde carga excesiva, especialmente por encima de un30% de la velocidad.
AUX T/C O/TEMP TRIP La temperatura del dispositivo Rotector T/C #2 esmayor que el valor de ajuste para disparo. Véase lapantalla 70. Puede ocurrir por una temperaturaexcesiva durante el arranque. Normalmente se debea un arranque prolongado, pero depende de dóndese ubique el dispositivo T/C #2.
FAULT 17 Las fallas de la #17 a la #32 normalmente no seutilizan. Estos mensajes no deberían presentarse.
ETCPLC FAULT TABLE ALARM El software del sistema PLC ha detectado cualquier
condición que puede dar como resultado que elsistema operativo del PLC coloque una entrada dedato ya sea en el cuadro de fallas del PLC o en elcuadro de fallas de I/O. Se requiere un LM90 paratener acceso a los cuadros de fallas del PLC.
TRANSDUCER FB ALARM Un desajuste importante ha sido detectado entre loscálculos de PF basados en datos provenientes deltransductor Watt VAr y el contador de altavelociada. Véase el manual del usuario.
ROTECTOR SYSTEM ALM La operación del sistema Rotector ha fallado y las

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
funciones de protección no están disponibles. ElPLC no usará los datos del sistema Rotector eneste caso. En la sección sobre detección y soluciónde fallas “5.10 Detección y solución de fallas delsistema Rotector II” se mencionan variasposibilidades.
LOW GND RESIST ALARM La resistencia del campo del motor al eje seencuentra por debajo del valor de ajuste de laalarma. Este ajuste se fija normalmente a 100Kohmios. La indicación debe ser causa depreocupación si se mantiene. El ruido eléctrico en elrotor puede disparar esta alarma ocasionalmente.Antes de abrir la máquina para un diagnóstico másexhaustivo, verifique la resistencia de conexión atierra con la máquina en la posición de descanso.Véase la pantalla 60.
MAIN FIELD O/TEMP ALM La temperatura del campo del motor, calculada porel método de resistencia, está por encima del nivelde alarma. Véase la pantalla 65. Esto puede ocurrircuando por un enfriamiento incorrecto, por un valorincorrecto para R25C10K en la subrutina SYSSU, opor una falla en la entrada analógica del sistemaRotector, como por el ejemplo el cableado.Igualmente, el valor del filtro puede haber sido fijadodemasiado bajo. Véase la pantalla 64.
SQ CAGE O/TEMP ALARM La temperatura del dispositivo Rotector T/C#1 esmayor que el valor de ajuste de la alarma. Véase lapantalla 67. Puede ocurrir por una temperaturaexcesiva durante el arranque. Revise la posibilidadde carga excesiva, especialmente por encima de un30% de la velocidad.
AUX T/C O/TEMP ALARM La temperatura del dispositivo Rotector T/C#2 esmayor que el valor de ajuste de la alarma. Puedeocurrir por una temperatura excesiva durante elarranque. Normalmente se debe a un arranqueprolongado, pero depende de dónde se ubique eldispositivo T/C #2.
DIODE FAILURE ALARM Se ha detectado una falla en un diodo de laexcitatriz sin escobilla rotativa. Si el motor continúafuncionando con un PF adecuado, la alarma pudieraser falsa. Si la alarma es seguida de un disparo deldispositivo Slipguard, existe la posibilidad de queuno de los diodos se encuentre cortocircuitado.
HSC MODULE FAIL ALM El diagnóstico del PLC ha determinado que existeuna falla en el módulo del contador de altavelocidad. Esto no causa un paro inmediato, perocausará problemas en el próximo arranque.Reemplace el contador de alta velocidad y permitaun ciclo de la potencia lo más pronto posible.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
CMM MODULE FAIL ALM El diagnóstico del PLC ha determinado que existeuna falla en el módulo de comunicaciones. Esto nocausa un paro inmediato, pero desactivará lascomunicaciones en serie. Reemplace el módulo decomunicaciones y permita un ciclo de la potencia lomás pronto posible.
TACH FAILURE ALARM Se ha detectado una velocidad por debajo de lavelocidad de aplicación de campo mientras serealizaba la soncronización. Esto causaráproblemas durante el nuevo intento de arranque.Puede ocurrir por un problema en el sensor.Verifique la orientación del sensor y el espacio deaire tan pronto como sea posible. Estascaracterísticas se muestran en el diagrama deaccesorios del motor.
HSC SPEED SETUP ALARM Ha ocurrido un error mientras se realizaba el ajustedel contador de alta velocidad para medir lavelocidad. Este ajuste ocurre únicamente durante elciclo de carga de potencia. Intente un ciclo de lapotencia para producir la falla de nuevo. Cambie elcontador de alta velocidad para eliminar la fuente.
HSC PF SETUP ALARM Ha ocurrido un error mientras se realizaba el ajustedel contador de alta velocidad para medir el factorde potencia. Este ajuste ocurre únicamente duranteel ciclo de carga de potencia. Intente un ciclo de lapotencia para producir la falla de nuevo. Cambie elcontador de alta velocidad para eliminar la fuente.
REMOTE NOT AVAILABLE La fuente de referencia remota no está disponible.Puede ser que no haya sido activadaadecuadamente por los puentes de software de lasubrutina SYSSU o, si es a través del enlace enserie, el enlace no se ha comunicado en más de unsegundo o, si es a través de la entrada 4-20mA, laseñal remota se encuentra en un rango inferior y sepiensa que ha fallado o ha sido desconectada.
ALARM 47 Las alarmas 47 y 48 normalmente no se utilizan.Estos mensajes no deben ocurrir.
ETCMOTOR ONLINE El control ha detectado un cierre del interruptor del
motor a través del contacto auxiliar del interruptor.En el caso de encendedores de voltaje reducido ocon devanados divididos, ya sea el cierre delinterruptor de arranque o del interruptor defuncionamiento causarán este evento.
MOTOR OFFLINE El control ha detectado una apertura del interruptordel motor a través del contacto auxiliar delinterruptor. En el caso de encendedores de voltajereducido o con devanados divididos, tanto elinterruptor de arranque como el interruptor de

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
funcionamiento deben abrirse para producir esteevento.
CONTROL READY El control de la excitatriz sin escobilla ESP1mantiene toda la potencia y no existen fallas pordisparo.
SYNCHRONISING El campo ha sido aplicado a la excitatriz sinescobilla.
SYNCHRONISEDEvent 54 Del evento 54 al 64 no se utilizan normalmente.
Estos mensajes no deberían ocurrir
Las alarmas y las fallas activas serán desplegadas en cualquier momento al presionar SHIFT + F8. De estamanera se dará inicio a una pantalla de instrucciones. Cada vez se que presione de nuevo la tecla SHIFT,se desplegará la siguiente falla o alarma activa. La última vez que se presione la tecla SHIFT se regresarála OIU a la pantalla de despliegue de faltas.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
MENSAJES QUE SE MUESTRAN EN LOS DESPLIEGUES DE CONDICIÓ N (POR OMISIÓ N)Observe que la hora desplegada en los mensajes de condición es la hora actual, mientras que el tiempodesplegado para los mensajes de eventos corresponde al tiempo del evento y es estático.Mensaje Significado y causas probablesTRIPPED El control ha sido disparado por una falla y no se ha
reinicializado. Véase el registro de eventos para laúltima secuencia de eventos.
READY-NO ALRM El control está listo para un arranque del motor y nohay alarmas activas.
READY + ALARM El control está listo para un arranque del motor. Noexisten fallas de disparo, pero existe una alarma.Véase la salida “NO_ALARM” del PLC. Revise elregistro de eventos para ver cuál alarma seencuentra activa.
STARTING El motor está arrancando (en línea).SYNCHRONISING El control de la excitatriz ha aplicado el campo y la
máquina se está sincronizando en la línea.SYNCHRONISED El campo de la excitatriz ha sido aplicado y el
control Slipguard ha determinado que la máquina seha sincronizado en línea, y tiene una excitaciónadecuada para la carga de corriente aplicada.
ROT START BLOCK Esta condición ocurre cuando se activa la lógica deinhibición del rearranque. La pantalla STARTBLOCK TIME LEFT mostrará el tiempo restanteantes de que pueda realizarse un arranque. Estafunción está activa tanto para el bloqueo dearranque Rotector como para el bloqueo dearranque tipo NEMA.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
ANEXO E – INICIALES Y ABREVIATURAS
Iniciales SignificadoACACBALRM
Corriente alternaInterruptor AC (arranque del motor)Alarma
AUXTEMPCTCUR
Temperatura auxiliarTransformador de corrienteCorriente
DCEEPROM
ESP1
Corriente directaMemoria de sólo lectura programable y borrableeléctricamenteExcitación, secuencia, protección
FBFCURFCR RAMP
RetroalimentaciónCorriente de campoIncremento de referencia de corriente de campo
FCURREGFLDCURGND
Regulador de corriente de campoCorriente de campoConexión a tierra
FUPGFRHSCOK
Seguimiento (autorastreo)Resistencia de falla de conexión a tierraContador de alta velocidad OK
HmHRCkVA
Hora / minutoAlta capacidad de ruptura (fusible)Kilovoltio amperios
KVARKWMD
Kilovar = kilovoltio amperios reactivoKilovatiosDía / mes
MFOIUPC
Campo principalUnidad de interfaz del operadorComputador personal (estilo IBM)
PF
PF1PF2
Factor de potencia (potencia real dividida por elkVA)Factor de potencia 1 (fuente = transductor Watt/VAr)Factor de potencia 2 (fuente = V, I comparación defase por HSC)
PF RAMPPIDPLC
Incremento de factor de potenciaProporcional, integral, derivadoControl de lógica programable
PTQREGRAM
Transformador potencialRegulador Q (o de potencia reactiva)Memoria de acceso aleatorio
RESROT START BLKRPM
ResistenciaBloque de arranque RotectorRevoluciones por minuto
RTUSC TEMPSh
Unidad terminal remotaTemperatura de la jaulaSegundos / centésimas de segundos

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
SNPSPVAr
Protocolo Serie NoventaValor de ajusteVoltios amperios reactivos
VAr RAMPVLTSWVTOK
Incremento de referencia VArVoltiosTransductor Watt VAr OK
PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
ANEXO F – Contraseñas
Las contraseñas se utilizan para proteger el programa de aplicación del PLC y la configuración de la OIU.
Contraseñas del PLC
El bloque “_MAIN” y la subrutina SYSSU no están protegidos por ninguna contraseña. Los dos bloquesdenominados ROTEC y ROT_GND están bloqueados para su despliegue y la contraseña no puede serdivulgada.
Todas las demás subrutinas se encuentran bloqueadas, lo que reduce las posibilidades de que los“aprendices” causen algún daño con el LM90.
La contraseña de 4 dígitos para esta subrutina es _____ (Preguntar al propietario del equipo).
Contraseñas de la OIU
Hay dos contraseñas de seis dígitos para al OIU. Pueden ser las contraseñas por omisión o pueden serpersonalizadas para su equipo para mayor seguridad. La contraseña Nivel 1 por omisión es 111111, y lacontraseña Nivel 2 por omisión es 222222.
La contraseña nivel 1 permite el acceso a la configuración de la OIU. Si esta configuración es modificadasin el consentimiento de GE, podría no ser posible obtener el respaldo de GE para este componente. Lacontraseña de Nivel 2 también permite utilizar la OIU para examinar los contenidos de los registros en elPLC. Esto se utiliza en ciertos procedimientos de diagnóstico y solución de fallas. La contraseña de Nivel 2es ____ (Preguntar el propietario del equipo o pruebe con la contraseña por omisión).
Pista:
Estas contraseñas aparecen en la placa de identificación del control de la excitatriz sin escobilla ESP1(Pregunte al propietario del equipo).
PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
ANEXO G – Acceso a la información del PLC
Durante el diagnóstico y la solución de fallas puede resultar útil tener acceso a la información del PLC. Porejemplo, puede monitorearse el valor digital interno de las entradas analógicas. La OIU es capaz demostrar cualquiera de las referencias internas (variables discretas o continuas). Para hacer esto, el modode la OIU debe cambiarse de AUTORUN al modo Menú. Para ello, obtenga la contraseña de NIVEL 2 parala OIU. Presione la tecla MODE para que aparezca la pantalla “Cambio de modo”. Al aparecer estapantalla, presione simultáneamente las teclas SHIFT y ENTER. Eso hará aparecer la pantalla de INGRESECONTRASEÑA (“enter password”). Escriba la contraseña de nivel 2 lentamente, asegurándose de queaparece un “ * ” en el lugar de cada dígito, y presiones ENTER. Si se colocó la contraseña adecuada,aparecerán dos líneas de un menú. NO INTENTE EXPERIMENTAR CON ESTE MENÚ A MENOS QUECOMPRENDA CABALMENTE LA OPERACIÓ N DE LA OIU. De lo contrario, podría generar cambios en laconfiguración que no pueden corregirse fácilmente y que inutilizarán la OIU hasta tanto no se recargue laconfiguración original.
Baje el cursor por el menú hasta llegar a ACCESO A DATOS DEL PLC (“access PLC data”) y presioneENTER. Aparecerá la siguiente pantalla:
El 00 que aparece en la pantalla es un número de bloque que identifica el PLC al cual se quiere teneracceso. Las teclas UP y DOWN le permiten moverse por los distintos tipos de referencia disponibles.Deténgase en el tipo de referencia que desea ver e ingrese el número de esa referencia. Véaseseguidamente la lista de tipos de referencia. Para seleccionar una nueva referencia (por ejemplo, unregistro), presione la tecla MODE y luego proceda a ingresar un nuevo número. Para regresar al menú deajuste, presione nuevamente la tecla MODE.
Tras regresar al menú de ajuste, baje el cursor hasta llegar a ENTER AUTORUN y presione la teclaENTER. La pantalla debe entonces regresar a una de las pantallas por omisión.
Prefijo de referencia Tipo de referencia
%R Memoria de registro -32768 a +32767%AI Entrada analógica -32768 a +32767%AQ Salida analógica -32768 a +32767%I Entrada digital 0 (falso) ó 1(verdadero)%Q Salida digital 0 (falso) ó 1(verdadero)%M Ref digital interna 0 (falso) ó 1(verdadero)%T Interna temporal 0 (falso) ó 1(verdadero)%S Referencias del sistema 0 (falso) ó 1(verdadero)%SA, SB, SC Referencias del sistema 0 (falso) ó 1(verdadero)
Enter data type:00 %R

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
ANEXO H – Interconexiones típicas y dimensiones de los equipos
Los diagramas del presente anexo ilustran la aplicación y los diversos componentes del control de laexcitatriz sin escobilla ESP1.
Se cuenta con dos estilos de módulo básico: (a) la versión de panel abierto para instalar en una cubierta delcliente y (b) la versión integral en su cubierta para instalar en la pared.
Las dos versiones utilizan un transformador de aislamiento aparte que se suministra con la unidad. En elcaso de la versión abierta, el transformador también es del tipo abierto. En el caso de la versión integral, eltranformador viene en su propia cubierta. Ambos tipos de tranformador vienen con un cable flexible de 3metros para realizar la conexión a los terminales designados del panel del ESP1. La conexión se realiza através de un conector que se encuentra en al parte izquierda del panel.
Las dos versiones incluyen un amperímetro (corriente de campo de la excitatriz) y una Unidad de Interfazdel Operador (OIU). En el caso de la versión abierta, la OIU y el amperímetro viene sueltos para serinstalados aparte en la cubierta del cliente. También hay un relé de medidor (amperímetro) que permanecemontado en el frente del panel. La OIU viene con un cable preterminado de tres metros que se conecta alpanel. En el caso de la versión integral, el cable y la OIU están instalados al frente del panel del ESP1.
La versión abierta también puede venir acompañada de una cubierta aparte para instalar en la pared o paracolocar directamente sobre el piso, en cuyo caso el transformador viene instalado dentro de la cubierta,mientras que el amperímetro y la OIU están montados al frente de la cubierta. Como estos tipos de“cubiertas separadas” pueden ajustarse en gran medida a las necesidades del cliente, los diagramaspresentados seguidamente son únicamente los diseños típicos; los diagramas especificados en el contratosustityen los presentados en estas páginas.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
ESP1Panel abiertol
(2)
TransformTipo abieto
(2)
OIU(1)
AM(1)
(1) = Instalado en la compuerta de la unidad del usuario(2) = Instalado en la unidad del usuario
ESP1Modelo integral
Transform.Tipo
cerrado
OIU AM
AM

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Diagrama de panel del ESP1 modelo abierto

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Diagrama de panel del ESPI modelo integral

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Diagrama de cubierta tipica para instalar en la pared

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Diagrama de cubierta tipica para colocar sobre el piso

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Diagrama basico de interconexion - Tipico

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Diagrama basico de interconexion - Tipico

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Diagrama de transformadores

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Diagarama de Modulo de Interfaz del Operador (OIU)

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
Diagrama de medidores

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
ANEXO J – Lista de repuestos
Los respuestos de la siguiente lista han sido agrupados por categoría. La lista es válida para el modelo4006L44020AD y BD. Para otros modelos ha de obtenerse la lista específica para cada cual.
Número de catálogo de GE DescripciónVoltaje de alimentación REPUESTOS CONSUMIBLES (Dispositivos de protección o
sujetos a desgaste)600 480 380 240 120 Todos
2 0177A1377PO24 Fusible, HRC, 30A (fuente 120V)2 0177A1377PO09 Fusible, HRC, 15A (fuente 240V)
2 0177A1377PO08 Fusible, HRC, 10A (fuente 380V)2 0177A1377PO07 Fusible, HRC, 8A (fuente 480V)
2 0177A1377PO06 Fusible, HRC, 6A (fuente 600V)2 0177A1374PO48 Fusible, 3AG, 5A 125V2 0177A1510P120 Fusible, 2A24V, para PWR3211 0291A6814ACP006 Relé (RL4R, listo para excit.)1 0177A1088P004 Diodo para relé
TARJETAS DE CIRCUITO (únicas para este producto)1 0621L0514G1 Tarjeta de control1 4006L4022AAG001 INST TRANSF MOD1 0291A6804AAP002 WVS33U-GE, Transductor 60 Hz
ó 1 0291A6804AAP003 WVS33U-GE, Transductor 50 Hz
REPUESTOS ELECTRÓ NICOS1 0291A6820AAP014 IC693PWR321 Suministro de
potencia1 0177A1807P001 Diodo, potencia1 0291A6810AAP004 Tiristor
DISPOSITIVOS PROGRAMADOS (programados exclusivamente pormotor
1 0291A6820AAP032 IC693CPU363 PLC CPU con programa
1 0291A6819AFP003 HE693OIU177 Unidad de Interfaz deOperador (OIU)
REPUESTOS DISPONIBLES EN TODO EL MUNDO1 0291A6820AAP015 IC693MDL240 Entrada digital 16P1 0291A6820AAP012 IC693MDL930 Salida de relé 8P1 0291A6820AAP004 IC693ALG442 Combo analógico 4l/2Q
1 0291A6820AAP005 IC693APU300 Contador de altavelocidad
01 0291A6820AAP007 IC693CMM311 Mod com. en serie-opción
1 0291A6820ACP001 IC693CHS391 Base 10 ranuras paraCPU

PGEI 5294 Rev. 5MANUAL DE INSTRUCCIONES
CONTROL DE EXCITATRIZ SIN ESCOBILLA ESP1
pgei_5294.doc General Electric Canada Inc. 08-02-01
Información propiedad de General Electric Canada Inc. Esta información solo puede ser utilizada para el propósito para elcual ha sido suministrada y no puede ser divulgada a ninguna parte distinta de la parte a quien GE Canada entregó dichainformación.
02 0291A6801ACP011 Transformador 120/240V prim.02 0177A1368P018 Transformador 240V prim.
02 0177A1368P016 Transformador 380V prim.02 0177A1368P014 Transformador 480V prim.
02 0177A1368P012 Transformador 600V prim.
Notas:1. Se utiliza únicamente con la opción de enlace en serie.
En caso de emergencias, los transformadores puedenser sustituidos por una unidad estándar de 3 kVA conun voltaje secundario de 160 a 240V para la potencia delrectificador y un voltaje