enhancing linear system theory with an pendulum...
TRANSCRIPT

Enhancing Linear System Theory Curriculum with an Inverted
Pendulum Robot
Brian HowardGeneral Electric
Dr. Linda BushnellUniversity of Washington, EE
7/2/2015 1
Topics• Motivation• LST Course Structure• MinSeg Robot• Lessons Learned• Conclusion
27/2/2015
• LST of today similar to that of 50 years ago.• Applications, though, are so much broader:
– Driverless cars– Financial models– Electric grid– Drones
• Provide a platform and environment that lets students apply and extend theory.
7/2/2015 3
Why enhance LST?

• Lecture component includes:– Block diagrams, modelling, and system properties– Causal and LTI systems– State space and transfer function relationships– Lyapunov and BIBO stability– Controllability and observability– Closed loop control, estimators, and observers
• Class (PMP) was enhanced by adding:– Matlab/Simulink projects to practice the theory– Work on the robot to apply control theory to a specific platform– Balancing of robot was bonus for the course.
7/2/2015 4
LST Structure

7/2/2015 5
Physical system (“Plant”) Model
MinSeg model development
Improved engagement:• Parameters can be hard to measure. • This naturally leads to questions about accuracy, uncertainty,
and how the parameters impact controller performance.

7/2/2015 6
MinSeg Model
α
, α
∗ 0. 1. 0. 0.62.1 44.6 0. 2120. 0. 0. 1.6.10 10.2 0. 485
090.0020.6
1 0 0 00 1 0 00 0 1 00 0 0 1
0000
State-space
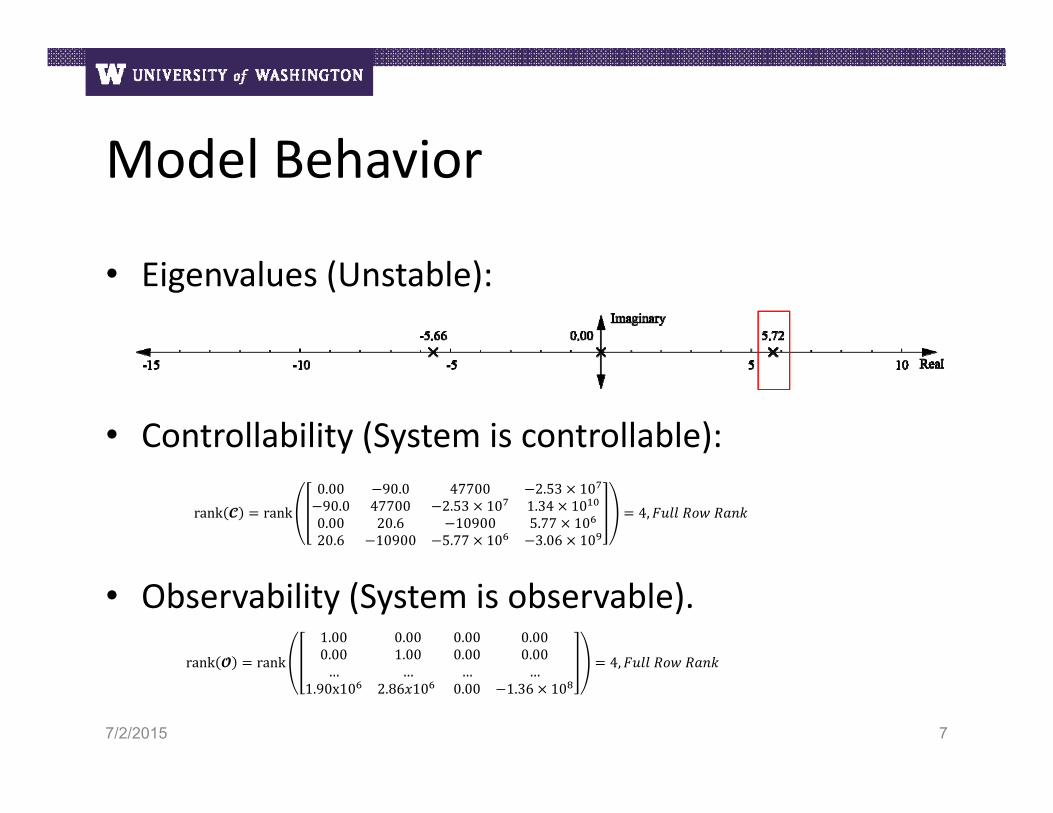
Model Behavior
• Eigenvalues (Unstable):
• Controllability (System is controllable):
• Observability (System is observable).
7/2/2015 7
rank rank0.00 90.0 47700 2.53 1090.0 47700 2.53 10 1.34 100.00 20.6 10900 5.77 1020.6 10900 5.77 10 3.06 10
4,
rank rank
1.00 0.00 0.00 0.000.00 1.00 0.00 0.00… … … …
1.90x10 2.86 10 0.00 1.36 10
4,
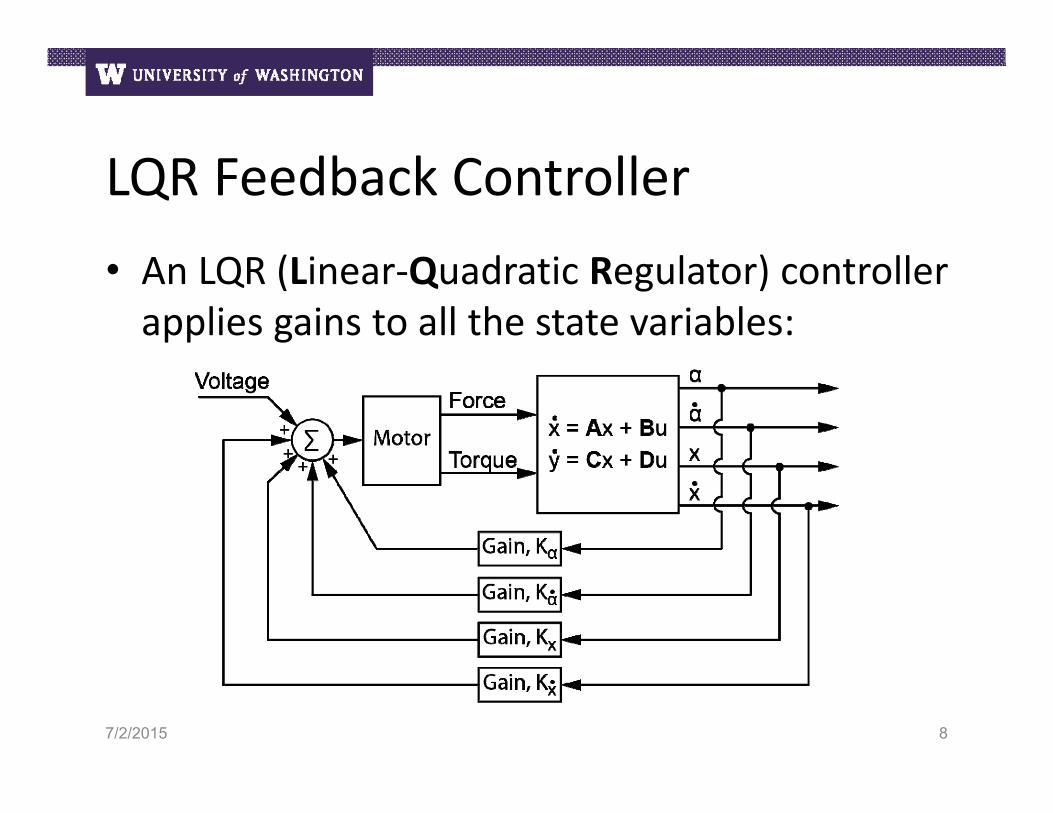
LQR Feedback Controller• An LQR (Linear‐Quadratic Regulator) controller applies gains to all the state variables:
7/2/2015 8

MinSeg with LQR impulse responseLQR Feedback Controller
7/2/2015 9
, 93.0864 18.0634 9.93776 52.6578

Feedback Controller DevelopmentP Controller
• Begin with proportional, “P” feedback. Block diagram and modified transfer function:
• With Matlab a gain of is found.
7/2/2015 10

P Controller Response
• Response of the model and the MinSeg robot:
7/2/2015 11
Pend
ulum
ang
le, α
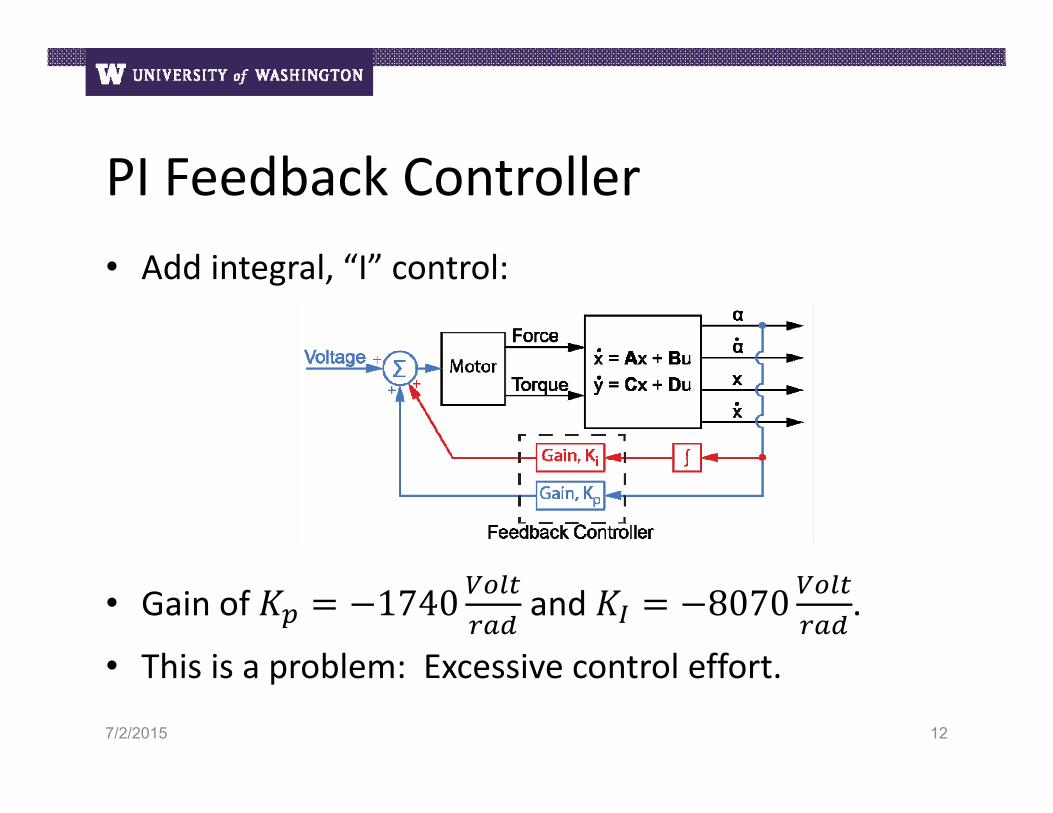
PI Feedback Controller• Add integral, “I” control:
• Gain of and .
• This is a problem: Excessive control effort.
7/2/2015 12

PI controller impulse response
• Lowered required response time and found more realistic gains:
7/2/2015 13
Pend
ulum
ang
le, α
Slow ripple

About those wheels...PID Feedback Controller
• Added differential gain, , to eliminate ripple and wheels need controller:
7/2/2015 14

PID + P controller impulse response
• Found and ,adjusted , and added gain to achieve desired response:
7/2/2015 15
Pend
ulum
ang
le, α

Summary
7/2/2015 16
• Class– Enhanced engagement– Robot improved understanding of concepts (pole placement, observers)
• Lab– Expanded learning (complimentary filter design)– Introduced additional depth to control theory (Motor controls and ultrasonic distance sensor)
Conclusion
7/2/2015 17
• Successful experiment!
• Next steps:– Explore Kalman filtering–Apply lab structure to other topics

Questions?
7/2/2015 18
‐URL goes here‐