enhancement of radar tracking with low level radar …
TRANSCRIPT

ENHANCEMENT OF RADAR
TRACKING WITH LOW LEVEL
RADAR DATA
Month 11, Year 2019 Niclas Carlström
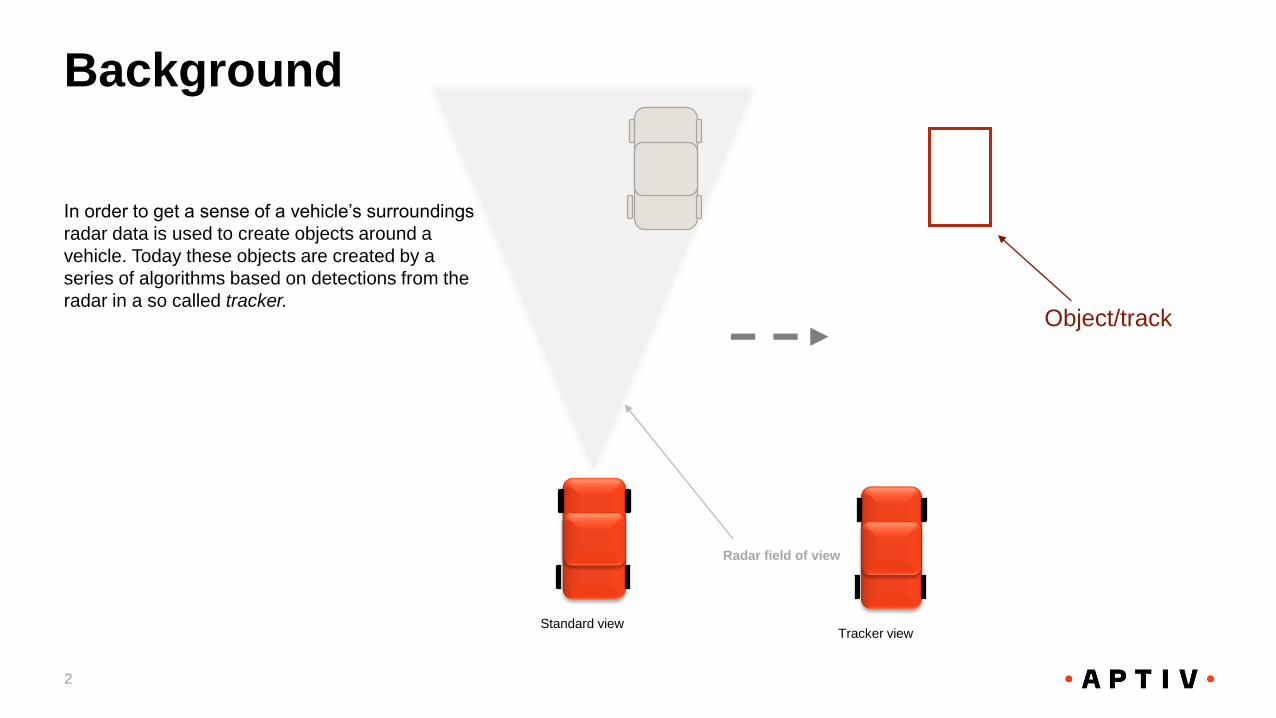
In order to get a sense of a vehicle’s surroundings
radar data is used to create objects around a
vehicle. Today these objects are created by a
series of algorithms based on detections from the
radar in a so called tracker.
Background
2
Tracker view
Object/track
Radar field of view
Standard view

A detection is a single radar reflection point that
contains information about the range and angle to the
object the detection came from.
Background
3
Detection
Detection view
Angle
Range

Detections are typically formed by performing Fast
Fourier Transforms (FFT) on raw data from the radar.
The measured reflection of a target is however not a
single point but a radar wave reflecting on an object.
This refection contains a large amount of data, and
with it a lot of information.
Background
4
Radar reflection view
Radar reflections
Radar waves

By analyzing and processing the raw data differently,
it could be possible to improve the radar tracker
performance greatly.
Purpose
5

Object size estimation
By using the object output from the tracker and reinserting them into
the CDC data, one could focus algorithms on certain areas in the
data cube and also predict where object information should be in the
CDC domain. This could potentially be used for finding the velocity
profile of an object, or to detect yawing of an object if it diverges from
a linear movement. Most importantly, size estimation could possibly
be done by analyzing the energy between detections that is expected
to stem from the same object.
Detection clustering
By grouping together detections at CDC level data, useful
estimates and assumptions could later be done within the tracker
algorithms. This could be done by exploring how the information
between detections look like, using knowlede such as how bushes,
walls and guardrails behave within CDC level data. Here eithier
algorithms could be developed, or machine learning be
implemented in order to reach saught after results.
Scope
6
When looking into low level radar data, also known as CDC data, with the purpose to enhancing radar tracking performance, there are
many areas to explore. APTIV would however like to focus of either of the following; Detection clustering and/or object size estimation.
Driver model based trajectory planning | 5/11/19

Contact Information
Master Thesis: Ground Truth Estimation | 4th of November, 2019 | Aptiv Confidential7
Niclas Carlström

RADAR ONLY
ESTIMATION OF EGO
MOTION
Month 11, Year 2019 Hanna Nyqvist

Measured range rate from radar
Radar Only Estimation of Ego Motion | 2019-11-04 |
Aptiv Confidential9
Host over the ground speed
Measured relative range rates by radar

Objective:
• Estimate ego velocity from radar measurements only
• Algorithm must be robust against outlier radar measurements that comes from non stationary objects
• Investigate how to estimate also ego yaw rate
• Investigate under which conditions algorithm converges (e.g. number of detections needed, maximum outlier to inlier
ratio)
Extra objectives:
• Investigate fusion of radar only estimates with other information sources such as wheel speed sensors/IMU etc
Data:
• Real data from traffic driving
• Real data from test track with ground truth from differential GPS
Contact person: Hanna Nyqvist
Scope
Radar Only Estimation of Ego Motion | 2019-11-04 |
Aptiv Confidential10
Contact Information
Master Thesis: Ground Truth Estimation | 4th of November, 2019 | Aptiv Confidential11
Hanna Nyqvist

GROUND TRUTH ESTIMATION
FOR VALIDATION OF RADAR
TRACKING
Month 11, Year 2019 Elvira Ramle

In order to get a sense of a vehicle’s surroundings radar
data is used to create objects around a vehicle. Today
these objects are created by a series of algorithms based
on detections from the radar in a so called tracker.
The purpose of a radar tracker is to take input from one or
several radar sensors in the form of detections and
produce reliable and true estimates of the states of
surrounding vehicles and objects. Different states are
estimated such as the velocity, heading and position and
this is done in various, and often complicated, traffic
scenarios.
Background
Presentation Title | Date | Aptiv Confidential13
Object/track
Radar field of
view
Standard view Tracker view

Purpose
Presentation Title | Date | Aptiv Confidential14
There are multiple tools to use when testing the performance of
the tracker:
• High precision GPS data
• LiDAR sensors
• Camera systems
However, these systems are either hard to employ in real traffic,
expensive or unreliable. Therefore, a tool that can produce better
estimates than the tracker in an offline environment would be very
useful for testing and validation of the tracker performance. This
would not only save time, but could help improve the tracker
performance significantly.

The idea is to develop an algorithm for estimation of ground truth
that can be used for test and comparison of the tracker itself. The
algorithm will utilize radar detections as input, like the tracker
itself. Additionally, it will also be allowed to use “future” data in its
estimation in contrast to the tracker which only has access to the
past and present.
Scope
Presentation Title | Date | Aptiv Confidential15
Two different approaches
• Ground Truth Estimation: Specific Traffic Scenarios
• Focus on specific traffic scenarios where the availability
of ground truth data would be most useful
• Examples: Traffic Jams, Tunnels, EuroNCAP test
cases etc.
• Ground Truth Estimation: General Approach
• Algorithm development where no general assumptions
can be made on the behavior of surrounding traffic

Contact Information
Master Thesis: Ground Truth Estimation | 4th of November, 2019 | Aptiv Confidential16
Elvira Ramle
DRIVER MODEL
BASED TRAJECTORY
PLANNING
November 5, 2019 Joachim Rukin

Trajectory planning is an essential part of an autonomous driving system. Let it be a lane
following function or a fully automated system, the trajectory planning provides input to the
motion control in order to get from point A to point B in an optimal way.
In lane following systems, the center of the lane is often calculated with the help of vision
systems and then tracked to ensure that the vehicle stays safely on the road. However, this
behavior of always following the center of the lane is something that differs from how a
normal driver would position the vehicle on the road, especially when driving in curves.
This unnatural positioning can feel uncomfortable or unsafe for the driver. The planning
algorithm need to be designed in a fashion so that it:
• Ensure that the planned trajectory keeps the vehicle within the lane bounds.
• Ensure that the planned trajectory can be executed comfortably for the driver.
• Can perform biasing maneuvers in lane to further increase the comfort level for the driver.
• Is computationally efficient to be able to run in real time.
Background
Driver model based trajectory planning | 5/11/19 18
Identified lane center for country road

• Planned trajectories feel more natural to the driver which increases the trust in the system.
• As multiple different driver models exist, dedicated research is required to arrive at the best solution.
• Since the trajectory has been planned with requirements concerning safety and comfort, the overall ride for the driver will both be safer
and more comfortable.
Purpose
Driver model based trajectory planning | 5/11/19 19

Using Aptiv’s existing test vehicle platform, a trajectory planning algorithm utilizing a driver model needs to be created. The developed
algorithm should be able to comfortably and safely plan trajectories to execute a set of desired maneuvers for the host vehicle. One such
set of maneuvers could be
• Lane following
• In-lane biasing
• Minimum risk maneuver, such as stopping by the side of the road
• Lane changing
Scope
Driver model based trajectory planning | 5/11/19 20

Contact Information
21
Joachim Rukin
Driver model based trajectory planning | 5/11/19

AUTONOMOUS
TRAILER PARKING
June 24, 2019 Andreas Andersson

Autonomous Trailer Parking | 2019-06-25 | Aptiv
Confidential23
Objective:
• Develop a path planner for parking a truck-trailer vehicle in a dense parking lot.
• The result could potentially be visualized in e.g. TruckMaker using some existing lateral and longitudinal controller.
• Focus path planning, not controller
Data:
• Map of parking lot and ego vehicle position
Contact person: Karin Brötjefors
Scope
Autonomous Trailer Parking | 2019-06-25 | Aptiv
Confidential24

Traditional path planning algoritms
from the A* family could be
used under constraints from a
motion model of an
articulated vehicle. Reverse parking
could also demand dividing the path
into two parts, which needs to be
connected at a position with a
common pose.
Model-based path planning methods
Autonomous Trailer Parking | 2019-06-25 | Aptiv
Confidential25

There is an area of machine learning that
is called Reinforcement Learning where
software agents take actions in an
environment based on some
reward function. Using this method, the
trailer could learn how to park by
formulating a higher reward for
approaching the parking space, and a
lower reward for colliding with obstacles or
driving in the wrong direction.
Machine Learning
Autonomous Trailer Parking | 2019-06-25 | Aptiv
Confidential26

Contact Information
27
Andreas Andersson
Driver model based trajectory planning | 5/11/19

INTELLIGENT
HIGHWAY MERGE
PILOT
June 24, 2019 Andreas Andersson

Intelligent Highway Merge Pilot | 2019-06-24 | Aptiv
Confidential29

Objective:
• Feature to do ”human like lane change” on highway when another vehicle must merge into the ego vehicle’s vehicle’s
lane
• Closed loop simulation in CarMaker, i.e. Lateral and longitudinal control
• Focus trajectory, not controller
Data:
Objects and lanes are present as processed output
Contact person: Anton Öqvist
Scope
Intelligent Highway Merge Pilot | 2019-06-24 | Aptiv
Confidential30

Contact Information
31
Andreas Andersson
Driver model based trajectory planning | 5/11/19

MULTI-AGENT
SYSTEM SIMULATION
OF ACC SCENARIOS
October 25, 2019 Anton Öqvist

Multi-agent system simulation of ACC Scenarios
Multi-Agent Simulation of ACC Scenarios | 2019-10-25 |
Aptiv Confidential33

Objective:
• Multi-agent system that creates realistic traffic scenarios with group behavior affected by road properties like hills
• Agent models with one degree freedom and variants to models behavior of different driver types and reaction patterns
• Possibility to switch individual agent behavior to an ACC
• Closed loop simulation in Matlab/Simulink or Car Maker where all agents act autonomously
Extra objectives:
• Add other road more road properties that might affect agents like speed limits
Data: Simulated in Matlab/Simulink with autonomous driving toolbox or Car Maker
Contact person: Anton Öqvist
Scope
Multi-Agent Simulation of ACC Scenarios | 2019-10-25 |
Aptiv Confidential34

Contact Information
35
Anton Öqvist
Driver model based trajectory planning | 5/11/19

MULTI-AGENT
SIMULATION OF AEB
EVENT
October 25, 2019 Anton Öqvist

Multi-Agent Simulation of AEB Event
Multi-Agent Simulation of AEB Event | 2019-10-25 |
Aptiv Confidential37

Objective:
• Multi-agent system that creates realistic AEB scenarios with multiple road users
• Agent models with one degree freedom and variants to models behavior of different driver types and reaction patterns
• Closed loop simulation in Matlab/Simulink or Car Maker where all agents act autonomously
Extra objectives:
• Possibility to run simulation with an active AEB in some or all agents
• Extending the model to react to warnings from AEB
Data: Simulated in Matlab/Simulink with autonomous driving toolbox or Car Maker
Contact person: Anton Öqvist
Scope
Multi-Agent Simulation of AEB Event | 2019-10-25 |
Aptiv Confidential38

Contact Information
39
Anton Öqvist
Driver model based trajectory planning | 5/11/19